Embed Size (px)
Citation preview

User Manual
Antonimina Valley Archaeological Survey UAV
Team 3 – Rexacopter
Team Members:
Michael Brancato: [email protected] Troy Fields: [email protected] Zach Porter: [email protected] Michael Rudy: [email protected] Michael Sandoval: [email protected] Instructors/Advisors/Sponsors:
Dr. Regina Hannemann Dr. James Lumpp Dr. Kevin Donohue Dr. Paolo Visona

Table of Contents Overview How It Works System Requirements
Software Requirements Hardware Requirements
Setup Guide Imaging System
CHDK Setup Post‐processing Software Setup
Flight System Ground Station Software Setup UAV Setup Radio Controller Setup
Mission Execution Guide Checklists and Procedures
Daily / Post‐Crash Systems Checklist Pre‐flight Systems Checklist Takeoff Procedures In‐Flight Procedures Post‐flight Systems Check
Mission Planning Powering On Onboard LED Status Indicator Post‐Processing Procedures
Specifications UAV
Power Characteristics Motors Propellers Battery

Caution! Always maintain a safe distance while operating a UAV. Never approach a UAV without first disarming the UAV. Propellers may cause serious injury.
Overview Team Rexacopter has developed a system for using a UAV (unmanned aerial vehicle) to capture images of a given target/terrain, and then produce a 3D model of the target/terrain. The system was originally developed in order to map an archaeological site in southern Italy, however the system has a broad range of potential applications. This document describes how to setup and use this system.
How It Works The system itself is organized into two main areas, the flight system, and the imaging system. The flight system comprises the quadcopter, groundstation software, and the manual radio controller. it is responsible for flying a grid pattern over a specified area at a specific height/velocity in order for the imaging system to capture photos of the area. The imaging system includes the physical camera, camera software, and postprocessing software that is used to generate the 3D models.
System Requirements
Software Requirements ● Agisoft Photoscan Standard Edition: http://www.agisoft.com/downloads/installer/
● Mission Planner: http://planner.ardupilot.com

● CHDK Firmware:
http://chdk.wikia.com/wiki/Powershot_N_%26_Powershot_N_Facebook%C2%A
E_Ready
● Rexacopter CHDK camera script: See Appendix A
● (Optional) Blender: http://www.blender.org
● (Optional) Makerbot Desktop: http://www.makerbot.com/desktop
Hardware Requirements
● Camera: http://www.usa.canon.com/cusa/consumer/products/cameras/digital_cameras/powershot_n
● The Rexacopter Custom UAV as described in the design documentation: <link
here>
● CHDK ready 32GB SD Card as described in the design documentation: http://www.amazon.com/SanDiskMemoryAdapterSDSDQUAN032GG4AVersion/dp/B00M55C0NS/ref=sr_1_2?ie=UTF8&qid=1428587948&sr=82&keywords=memory+sd+card+32+gb
Setup Guide
Imaging System
The Canon Powershot N is fully functioning out of the box and has the capability to capture beautiful photographs. However, in order to utilize the camera to fit our specific needs, CHDK needs to be installed so that custom scripts can be run.

CHDK Setup CHDK (Canon Hack Development Kit is a firmware enhancement suite that enables users to perform tasks that an average camera could not complete. CHDK is fully reversible and does not make any permanent changes to the camera’s default firmware. Please see the design documentation to see how to setup an SD card to be able to boot CHDK. PreFlight Camera Check List
❏ Make sure the appropriate SD card is in the camera ❏ Make sure the camera is in “Continuous Shoot Mode” ❏ Make sure that the SD card slot is OPEN ❏ Start the camera in CHDK mode by hitting the PLAY button
❏ It is now OK to close the SD card slot ❏ To show the CHDK menu, press the HOME button on the same side of the camera as
the PLAY button ❏ Go to the CHDK MENU on the top left of the screen ❏ Use the up/down buttons on the right side of the screen to scroll down to the option
“Script (program your camera). ❏ Click “Set” to enter the option ❏ Choose the option “Load Script from File” ❏ A list of files will be displayed, choose the rex script by pressing “Set” ❏ Press the red “Exit Alt” key, the script is loaded ❏ Press the “REC/PLAY” button on the bottom right ❏ Once the camera is in RECORD mode, hit the “RUN” button on the top right to begin
the script (loaded previously) ❏ End the script by turning off the camera
Postprocessing Software Setup Agisoft Photoscan is commercial software that uses a custom photogrammetry algorithm to use 2D images and generate a 3D model by comparing similar binary descriptors found in multiple images. The process of generating a 3D model in Agisoft is illustrated below. 1. Import Images

2. Align Photos
3. Build Dense Point Cloud
4. Build Mesh
5. Build Adaptive Orthophoto
Flight System

Ground Station Software Setup Mission planner is ready to go once downloaded, but the settings for the UAV need to be modified using the mission planner program.
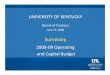
UAV Setup The UAV should be properly assembled, but some minor orientation issues can be troublesome if not carefully addressed. The order of the ESC signal wires going into the Pixhawk is important and for the x configuration being used by the Quad the motors should be hooked up in the order shown in Figure 2, while Figure 1 shows where on the Pixhawk the wires from the ESCs are supposed to attach. Keep in mind that the wire color of the ground reference is black when orienting the wires.
Figure 1: ESC input
Figure 2: Rotor orientation
The forward facing side of the quad should be the side with the red arms and the gps and Pixhawk both have arrows indicating their orientation (double check that these are both facing towards the front). Also, the orientation of each rotor (clockwise or counter clockwise) should be checked once the quadcopter is turned on. If any of the rotors are spinning the wrong way simply switch two of the three wires going from that motor to its ESC located underneath the arm of the UAV. Every rotor that is clockwise spinning should have a pusher propeller (noted by a p on the propeller) and every counter clockwise spinning rotor should have a regular propeller.Whenever changing a propeller ensure that the prop nut fastening the propeller to the motor is firmly secured.

Radio Controller Setup
The radio should already be set to all of the correct channels and values, double check the flight mode configuration before each mission using the ground station to avoid any accidental changes.
Mission Execution Guide
Checklists and Procedures For safe operation of the UAV, specific actions must be performed before flight. Team Rexacopter has provided a set of ordered checks and procedures commonly used for safe operation. See Appendix A for printable copies of these lists.
Daily / PostCrash Systems Checklist
The following checklist should be followed each day the UAV is initially set up for use, as well as after any collision or crash landing. For all checks, if damage to the UAV is found, discard the unusable parts and install a replacement.
❏ Unplug battery ❏ Remove all propellers and inspect for new cracks or damage. ❏ Inspect all arms for damage ❏ Inspect all attachment points for cracks or damage ❏ Inspect flight controller and GPS modules for damage ❏ Inspect speed controllers for damage ❏ Inspect all wiring for nicks, tears, loose connections or other damage ❏ Inspect landing gear for excessive wobble, cracks or other damage ❏ Inspect camera mount for damage ❏ Inspect camera for damage ❏ Test camera for correct operation ❏ Check all screws, tighten as needed ❏ Install all propellers in their proper orientation (See setup guide for orientation) ❏ Tighten all propellers
Preflight Systems Checklist
The following checklist should be followed prior to any flight.
❏ UAV batteries sufficiently charged ❏ RC Transmitter batteries sufficiently charged ❏ Camera batteries sufficiently charged ❏ Propellers installed and tightened (tighten before each flight) ❏ Visual inspection of all motor connections

❏ Visual inspection of all PPM signal wires ❏ Visual inspection of power distribution and all ESCs ❏ Camera securely mounted to UAV ❏ Camera powered on ❏ Groundstation software running ❏ Groundstation telemetry radio connected ❏ Camera installed on UAV ❏ UAV in safe launch and land location ❏ Nearby trees, buildings and other obstacles noted by pilot ❏ Area clear of bystanders, observers warned that UAV is powering on ❏ Camera control script running ❏ RC transmitter powered on ❏ RC transmitter throttle down, proper mode selected ❏ UAV powered on ❏ Flight controller in proper takeoff mode (stabilize, loiter, etc) ❏ Flight controller LEDs indicate readytoarm ❏ RC receiver and flight controller indicate RC reception ❏ Groundstation connected to UAV via telemetry radio ❏ No PreArm warnings are present on Groundstation ❏ Groundstation indicates good RC and telemetry reception ❏ Safety switch pressed, if required
Takeoff Procedures
❏ Warn all observers and other persons nearby of imminent takeoff ❏ Pilot or groundstation engineer to arm the UAV ❏ Pilot visually sweep area for new people or new obstances ❏ RC throttle up ❏ Hover UAV 5 to 10ft above launch location and switch to loiter for 20 seconds ❏ Look and listen for problems during initial hover
InFlight Procedures
Once the UAV has successfully loitered for about 20 seconds and there are no obvious problems such as strong oscillations or inability to easily hold its position then the pilot should switch to auto mode which will conduct the mission. During the flight the pilot should be watching for any potential hazards or malfunctions with the UAV. If a problem occurs the pilot should flip the emergency switch (switch 2) and the UAV will attempt to land itself, if this is unsuccessful or makes things worse then immediately hit the throttle cut button and the signals to the motors will be cut, after using throttle cut turn the throttle all the way down on the remote before letting go of the button.

Flight Mode Chart
Switch 1 0 position
Switch 1 1 position
Switch 2 0 position
Stabilize Land
Switch 2 1 position
Loiter RTL
Switch 2 2 position
Auto Land
Stabilize is the default manual flight mode in which missions are begun, loiter attempts to hold the position of the quad as long as the throttle stick is centered, and auto attempts to perform a planned mission. The emergency modes are land which tries to immediately land the UAV or return to launch which ascends/descends the quad to the set height (default 15m) and then flies to directly above the launch point before trying to land.
Mission Planning Locate the desired flight area using the map provided on Mission Planner.. Rightclick and select Draw Polygon > Add Polygon Point. Add polygon points in order to create a polygon around the area you wish to map. After you are done drawing your polygon,, rightclick and select Auto WP > GridV2. This will create a grid of waypoints and you can edit specific settings from there making your speed 1m/s, your height at 9m, and the distance between grid lines at about 5m. Once all the waypoints are generated select the write waypoints button and then the UAV will be ready to fly the mission, select read waypoints to double check that the UAV has the correct waypoints set.

Powering On The UAV is equipped with a Lithium Polymer battery. To power the UAV on, simply plug the battery’s female XT60 connector into the Power Module’s male XT60 connector. A series of musical tones will play and the RGB LED on the flight controller and safety switch will begin to flash.
Onboard LED Status Indicator The onboard RGB LED is used to visually indicate the status of the flight controller to the pilot. See the following table for the meaning of each LED status.
Flashing Red and Blue The flight controller is initializing. This mode may also indicate speed controller calibration if the throttle was not 0 when powered on.
Double flashing yellow A system error or prearm check failure.
Flashing blue System ready, but no GPS lock. System will arm on nonGPS modes.
Flashing green System ready and GPS has acquired enough satellites. System will arm on all armable modes.
Solid green System is armed and ready to fly.
Flashing yellow System has lost RC radio signal, and activated the RC failsafe. Note: Team Rexacopter does not provide a radio RSSI signal, and this mode should never activate.
Flashing yellow and quick beeping tone The battery failsafe has activated. The battery voltage has dropped below the FS_BATT_VOLTAGE parameter value.
Flashing yellow and blue with high and low beeps.
The GPS failsafe has activated due to GPS failure or glitch.

PostProcessing Procedures Agisoft Photoscan is commercial software that uses a custom photogrammetry algorithm to use 2D images and generate a 3D model by comparing similar binary descriptors found in multiple images. The process of generating a 3D model in Agisoft is illustrated below. 1. Import Images
2. Align Photos
3. Build Dense Point Cloud
4. Build Mesh

5. Build Adaptive Orthophoto
Once the orthophoto has been constructed the use can now export the 3D model into popular 3D model formats such as .stl and .obj.

Specifications
UAV The UAV is the assembled components of the UAV frame, motors, propellers, battery, camera, and all speed controllers and wiring. All calculations are based on the AUP (AllUpWeight) and the use of the standard 14” propellers unless otherwise noted. The AUP includes the Standard Payload, the camera and its mount. All calculations utilize the 8000 mAh battery, unless otherwise noted. Standard Payload: 245 g (camera and mount) Length: 409 mm Width: 409 mm Height: 266 mm Overall UAV Size: 578 mm (diagonal dimension) 6400 mAh battery 8000 mAh battery Mass: 1.598 kg Maximum Payload: 1.456 kg Maximum Total Mass: 3.054 kg Mass with Std. Payload: 1.843 kg (AUP) Thrust to Mech. Power: 10.89 g/W (typical) Maximum Thrust: 5.545 kg Hover Throttle: 45% Estimated Flight Time: 12.2 min Maximum Hover Time: 16.5 min Maximum Tilt: 53 ° Maximum Ground Speed: 32 km/h, 19.9 mph
Mass: 1.722 kg Maximum Payload: 1.357 kg Maximum Total Mass: 3.079 kg Mass with Std. Payload: 1.967 kg (AUP) Thrust to Mech. Power: 11.65 g/W (typical) Maximum Thrust: 6.095 kg Hover Throttle: 47% Estimated Flight Time: 14.3 min Maximum Hover Time: 18.9 min Maximum Tilt: 50 ° Maximum Ground Speed: 31 km/h, 19.3 mph
State Electrical Power Mechanical Power Efficiency Hover 236.4 W 186.4 W 78.9% Maximum Throttle 745.2 W 523.2 W 70.2% Most Efficient 314.0 W 250.8 W 79.9%

Power Characteristics
Motors
Model: NTM Prop Drive Series 2836 750kv Kv: 750rpm/v Magnetic Poles: 3 Max Current: 18 A Max Power: 165 W @ 12 V Propeller Shaft Diameter: 4 mm Mass: 87 g
Propellers
Model: APC SlowFly 14x4.7 Diameter: 14 in Pitch: 4.7 in/revolution Hub Diameter: 0.50 in. Hub Thickness: 0.29 in. Shaft Diameter: 1/4 in. Weight: 0.49 oz (Approximate Mass: 13.89 g) In some cases, it may be acceptable to use smaller propellers on the UAV. For convenience, the following graphs are provided and assume all other standard UAV components are used.

Battery
Model: RMRC 8000mAh 3S 35C LiPo Pack Chemistry: Lithium Polymer (LiPo) Capacity: 8000mAh Voltage per Cell: 3.7 V (nominal) Cells in Series: 3 Cells in Parallel: 1 Nominal Voltage: 11.1 V Constant Discharge: 35C (280 A) Peak Discharge (2 sec burst): 70C (560 A) Mass: 560g Dimensions (L x W x H): 190 x 52 x 25 mm Charge Current: 8 24 A Recommended (13C) Max Charge Current: 48 A (6C) Watthours: 88.8

CHDK Script rex_fast.bas
@title Rexacopter @param n delay between refocus @default n 10 @param d press half delay @default d 1 @param s start delay @default s 10 sleep s*1000 while d < 100000 press "shoot_half" sleep d*1000 + 500 press "shoot_full" sleep n*1000 release "shoot_full" wend

![FALL 2016 UNAAC OFFICER PROFILES[1]...Brandy Smith Secretary Brandy.smith1@uky.edu Caroline Newman Treasurer Caroline.newman@uky.edu Hannah Spurlock UNAAC Rep Hannah.spurlock@uky.edu](https://img.pdfslide.us/doc/110x75/613e9dcc69193359046d3a28/fall-2016-unaac-officer-profiles1-brandy-smith-secretary-ukyedu-caroline.jpg)