Embed Size (px)
Citation preview

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Design Concepts and Process Analysis for Transmuter Fuel
Manufacturing Georg F. Mauer, Professor
Jamil Renno, Graduate Student
Department of Mechanical Engineering
University of Nevada, Las Vegas
Eighth Information Exchange Meeting on Actinide and Fission Product Partitioning
and Transmutation

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Table of Contents
•Introduction
•Manipulator Dynamics
•Analysis Of Fuel Fabrication
•Simulations of Robotic Material Handling Processes
•Conclusion
Design Concepts and Process Analysis for Transmuter Fuel Manufacturing

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
A manufacturing plant for transmuter fuel would have to process
considerable quantities in a hot cell.
Transmuter Fuel Manufacturing: Approx. 100 tons of Americium
fuel annually.

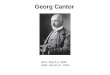
Transmutation
• Impact:– Lower
radiotoxicity– Shorter time
frame of concern– Smaller volume
of waste– Optimized waste
forms
10,000
1,000
100
10
1
0.1
10 100 1,000 10,000 100,000 1,000,000
No Transmutation(i.e., Direct Disposal orconventionalreprocessing)
Toxicity ofNaturalUranium
<1,000Years
300,000Years
WithTransmutationR
elat
ive
Tox
icity
Year
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Source: Herczeg 2003

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Transmuter Fuel Types
With regard to fuel manufacturing, we may distinguish among three categories:
•Dispersion Fuels (several subtypes exist)
•Ceramic Fuels (several subtypes exist)
•Metallic Fuels

Modeling Fuel Manufacturing Process
ProEngineer: Solid Modeling
MSC.visualNastran:Dynamics
MATLAB Simulink:Control
3D Drawings of Hot Cell Components
Define Dynamic Properties, Kinematic Constraints
Command generation, and Equipment Control through Feedback.
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Wälischmiller Robot:
•Modular design
•All drives and Sensors in Base
•30 to 240 kg Load capacity
Fuel Fabrication Equipment

Robot Analysis
Kinematics
Dynamics
Inverse, ForwardKinematics
Control
Path PlanningTrajectory Generation
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
ROBOT PATH PLANNING AND KINEMATICS
The robot model was developed using the Denavit-Hartenberg formulation Arm motion is modeled as a series of successive spatial rotations and translations. For an arm with n joints, the end effector position relative to the base (index 0) is
i
jj
ji
ii
1
112
11
00 AAAAT

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
------------------------------------------------------------------------------------------------------
d dh4
a dh3
dh2
dh1
dh
0
Joint2
Joint3
0
Joint5
Joint6
Joint7 90deg
0
0
90deg
0
0
90deg
90deg
90deg
90deg
90deg
0
0
90deg
0
90deg
0
0
0
0
0
0
4.75
13.0
0
0
0
24
42.5
10.5
41.5 9
10.5
29.5
0
0
0
0
0
a d
n 11There are a total of 5 joints requiring 11 coordinate transformations to correctly model the system.
Key dimensions for the manipulator are as follows:
Joint7 0degJoint6 0degJoint5 0degJoint3 0degJoint2 0deg
The input angles for the joints () are as follows:
Kinematic Analysis of the Wälischmiller Manipulator (Mathcad analysis)

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
ROBOT PATH PLANNING AND KINEMATICS
Path generation in Matlab

Smooth Motion Profile For Trajectory Planning
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

Control Law Implementation Simulink and MSC.visualNastran
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

(1) Hot Cell Design and Analysis for Powder Processing
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Pellet Press Sintering Oven Surface Grinder
Inspection StationCladding Tube

Possible Floor Plan for Powder Processing
Second Robot
First Robot
SinteringOven
V-Tray
CladdingTube
ConveyorBelt
Camera
Pellet Press
ShieldedGlass
Bin
SurfaceGrinder
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Hot Cell in OperationLoading Pellets for Insertion into the
Cladding Tube

The simulation permits the detailed analysis of process parameters, such as speed and forces on a fuel pellet.
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Two examples follow.

Robot Speed and Forces on Pellet
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

Friction Forces on Pellet
UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

Accident AnalysisCollision
Manipulator repeatedly impacts the wall, while moving the pellet to the inspection station.

Accident AnalysisCollision
Impulses during Collisions with a rigid obstacle.

Accident AnalysisPellet Stack Buckling

Accident Recovery:Dropping a Pellet

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Time-Motion StudiesPowder Processing

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
(1) Time-Motion Studies - Powder ProcessingPellet accelerations not to exceed 20 m/s2
Pick and Place Time Intervals, per pellet.
Hot cell with two active Robots.
Operation Time in Seconds
Robot 1: Image Acquisition (Identify pellet in output tray of the pellet press, select pellet for grasping, compute pellet location and orientation)
5
Pellet Press to Sintering Boat 6
Return robot arm to Pellet Press 4
Total time Robot 1 14Robot 2: Sintering Boat to Grinder 6
Return robot arm to Sintering Boat 4
Grinder to Dimensional Inspection Station 8
Dimensional Inspection Station to V-tray for Insertion into the cladding tube
6
Return robot arm to Sintering Boat 6
Total time Robot 2 30

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Time-Motion Studies - Powder Processing
The time required for pellet handling is small
in comparison to the sintering time.
(between 1 and 18 hours, depending on process)
The time required for the handling metal pins and dispersion fuel compacts will be
comparable to those for powder processing, or less.

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Time-Motion StudiesMetallic Fuel Processing

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Insertion of Metal Pins into the Cladding Tube

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
(2) Time-Motion Studies - Metallic Fuel ProcessingPin accelerations not to exceed 20 m/s2
Pick and Place Time Intervals, per pin
Hot cell with a single active Robot.
Robot Operation Time in Seconds
Storage Rack to Grinder 6
Return robot arm to Rack 4
Grinder to Dimensional Inspection Station 8
Dimensional Inspection Station to V-tray for Insertion into the cladding tube
6
Return robot arm to Storage Rack 6
Total time for Robot, per pin 30

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Time-Motion StudiesDispersion Fuel Processing

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Dispersion Fuel Manufacture

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Conclusion
The simulation analysis performs detailed evaluation of the manufacturing process, and detects possible accidents and failures in the hot cell. It allows for the comprehensive examination and testing of failure scenarios as well as recovery procedures, and thus for the iterative optimization of all mechanical hot cell components, ensuring maximum reliability and safety.
Design Concepts and Process Analysis
for Transmuter Fuel Manufacturing

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
End of Presentation

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Simulation Examples
Pick and Place Operation:
Move fuel pellet from sintering press to preparation area for fuel pin loading.

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Simulation Example: Friction Forces during
Fuel Pin Loading

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Simulation Example: Torque in Joint 3 (Elbow) during Fuel Pin Loading

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
•We developed a complete mathematical model of robot kinematics, dynamics, and control.
•3D CAD models of hot cell equipment and robots were developed and integrated with the robot dynamics model, using Visual Nastran4D software.
•Each robot is controlled from Matlab through a Simulink interface with Visual Nastran4D.
3D Modeling: Robot Simulation

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
General Form of the Rotational Joint Matrix
cos i sin i
0
0
cos i sin i
cos i sin i
sin i 0
sin i sin i
sin i cos i
cos i 0
ai cos i
ai sin i
di
1
All joints are rotational, and therefore, the general form (Ai) of the rotational joint matrix will be used. Solving for the General Rotational Matrices:
i 1 n
Ai
cos i sin i
0
0
cos i sin i
cos i cos i
sin i 0
sin i sin i
sin i cos i
cos i 0
ai cos i
ai sin i
di
1

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
The Robot Controller (Matlab Simulink)
Manipulator dynamics are represented as block ‘vNPlant’

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Source: J. Breese, DOE, 1999

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Fuel Fabrication Equipment
Hot Cell Equipment (Wälischmiller )

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Fuel Conditioning Facility at ANL West, Idaho Falls. Hot Cell Schematic.

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Transmuter Fuel Fabrication Issues:• Hot cell required
• Criticality concerns mandate small batch sizes
• Large fuel quantities suggest process automation
• Equipment for hot cell operation must be identified or developed.
• Material flow and operational sequence
• Long term reliability must be ensured
• Design must prove he ability to cope with a wide range of contingencies (e.g. equipment failures, spillage, breakage)

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Three processes for Americium Fuel Fabrication (Haas et al.), 1998

UNIVERSITY OF NEVADA LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING
Americium Fuel Fabrication for 1 ton of Am/year (Haas et al.), 1998