Embed Size (px)
Citation preview
TW22
UNIVERSITY OF BOLTON
SCHOOL OF ENGINEERING
BSC (HONS) MECHATRONICS TOP-UP
SEMESTER 1 EXAMINATION 2016/2017
ADVANCED MECHATRONIC SYSTEMS
MODULE NO: MEC6002
Date: Wednesday 11 January 2017 Time: 10:00 – 12:00 INSTRUCTIONS TO CANDIDATES: There are 6 questions. Answer 4 questions. All questions carry equal marks. Marks for parts of questions are shown
in brackets. This examination paper carries a total of
100 marks. All working must be shown. A
numerical solution to a question obtained by programming an electronic calculator will not be accepted.
Page 2 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
Q1
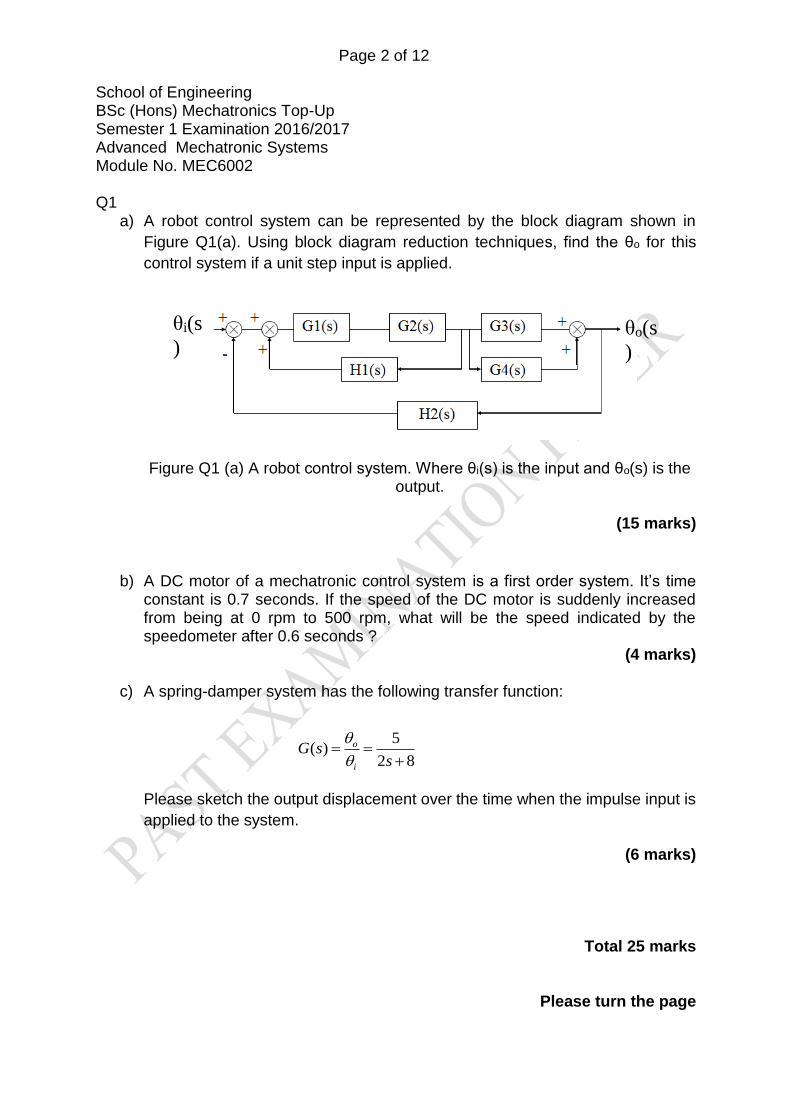
a) A robot control system can be represented by the block diagram shown in
Figure Q1(a). Using block diagram reduction techniques, find the θo for this
control system if a unit step input is applied.
Figure Q1 (a) A robot control system. Where θi(s) is the input and θo(s) is the
output.
(15 marks)
b) A DC motor of a mechatronic control system is a first order system. It’s time constant is 0.7 seconds. If the speed of the DC motor is suddenly increased from being at 0 rpm to 500 rpm, what will be the speed indicated by the speedometer after 0.6 seconds ?
(4 marks)
c) A spring-damper system has the following transfer function:
Please sketch the output displacement over the time when the impulse input is
applied to the system.
(6 marks)
Total 25 marks
Please turn the page
θi(s
) θo(s
)
82
5)(
ssG
i
o
Page 3 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
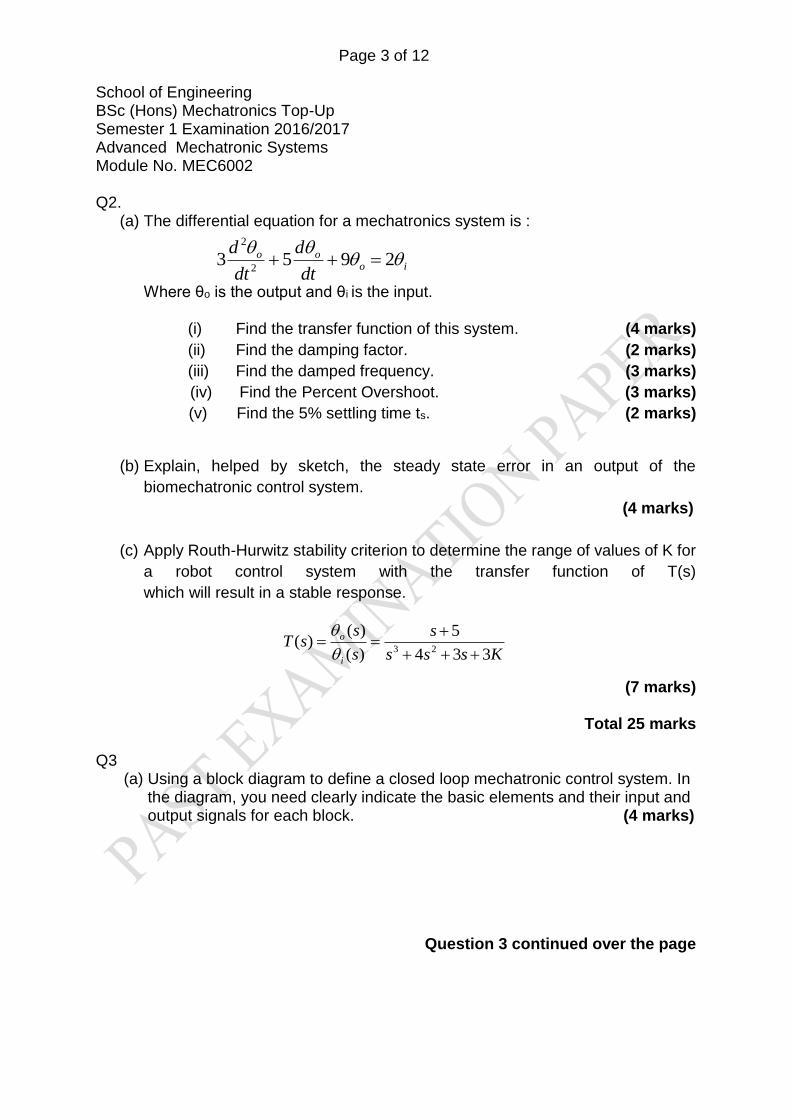
Q2.
(a) The differential equation for a mechatronics system is :
Where θo is the output and θi is the input.
(i) Find the transfer function of this system. (4 marks)
(ii) Find the damping factor. (2 marks)
(iii) Find the damped frequency. (3 marks)
(iv) Find the Percent Overshoot. (3 marks)
(v) Find the 5% settling time ts. (2 marks)
(b) Explain, helped by sketch, the steady state error in an output of the
biomechatronic control system.
(4 marks)
(c) Apply Routh-Hurwitz stability criterion to determine the range of values of K for
a robot control system with the transfer function of T(s)
which will result in a stable response.
(7 marks)
Total 25 marks
Q3 (a) Using a block diagram to define a closed loop mechatronic control system. In
the diagram, you need clearly indicate the basic elements and their input and output signals for each block. (4 marks)
Question 3 continued over the page
iooo
dt
d
dt
d
2953
2
2
Ksss
s
s
ssT
i
o
334
5
)(
)()(
23
Page 4 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
Question 3 continued
(b) As a mechatronic system design engineer, you are working on the design of the following two systems:
A smart wheelchair
A prosthetic limb
i) From sensor listed below, select two sensors for the smart wheelchair and two sensors for the prosthetic limb and briefly explain reasons for selecting them: Myoelectrodes Gyroscope Linear Transducers Touch Pads (FSR) Voice Vision Accelerometer Laser rangefinder (8 marks)
ii) Currently, brushed DC motors have been used for both these two systems. Make comments on using brushed DC motors, and provide suggestions for using alternative actuators (at least Three actuators).
(5 marks)
iii) Describe how brain-computer interface can be applied into these two systems.
(8 marks)
Total 25 marks
Please turn the page
Page 5 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
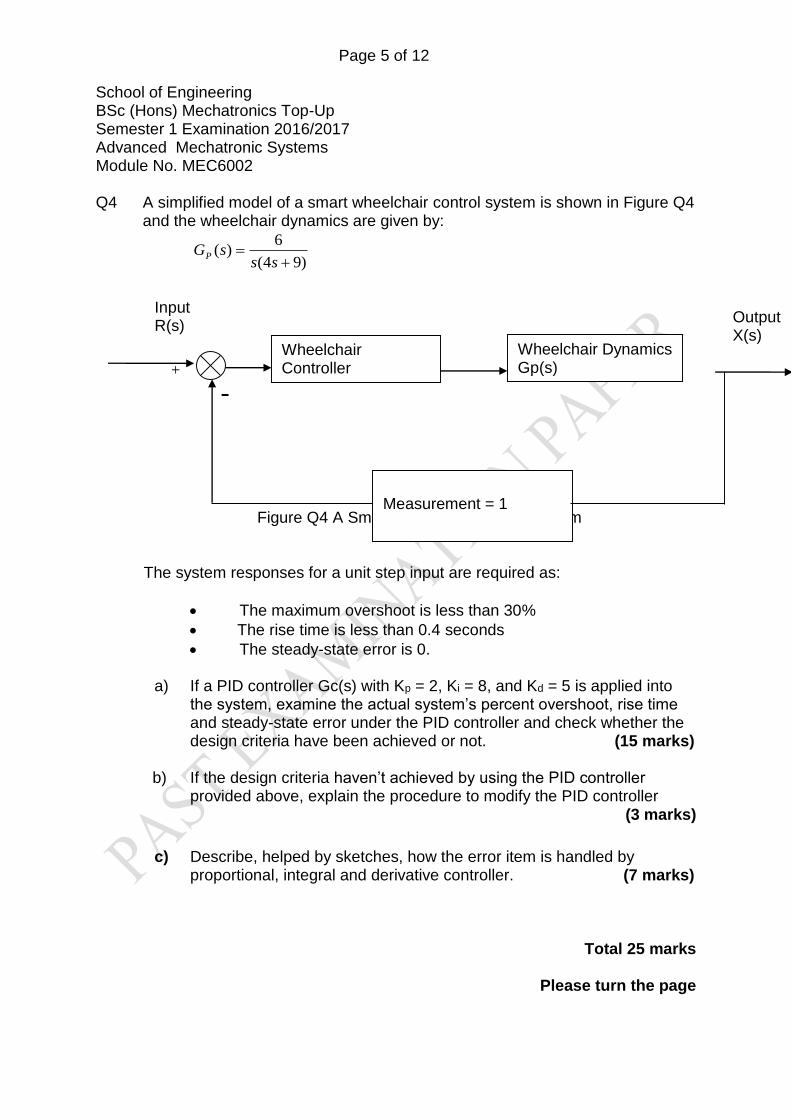
Q4 A simplified model of a smart wheelchair control system is shown in Figure Q4
and the wheelchair dynamics are given by:
)94(
6)(
sssGP
Figure Q4 A Smart Wheelchair control system
The system responses for a unit step input are required as:
The maximum overshoot is less than 30%
The rise time is less than 0.4 seconds
The steady-state error is 0. a) If a PID controller Gc(s) with Kp = 2, Ki = 8, and Kd = 5 is applied into
the system, examine the actual system’s percent overshoot, rise time and steady-state error under the PID controller and check whether the design criteria have been achieved or not. (15 marks)
b) If the design criteria haven’t achieved by using the PID controller provided above, explain the procedure to modify the PID controller
(3 marks)
c) Describe, helped by sketches, how the error item is handled by proportional, integral and derivative controller. (7 marks)
Total 25 marks
Please turn the page
Output X(s)
- +
Input R(s)
Wheelchair Dynamics Gp(s)
Wheelchair Controller
Measurement = 1

Page 6 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
Q5 (a) Using block diagrams, briefly explain an analogue closed loop control
system and a digital closed loop control system. Assume that input, output and sensor signals for both control systems are all analogue signals. (6 marks)
(b) Explain what is meant by a zero-order hold (ZOH) system. (4 marks) (c) A controller has a 10 bit Analogue to Digital Converter with the signal
range between -8 Volt to +8 Volt: (i) What is the resolution of the AD converter? (2 marks)
(ii) What integer number represented a value of +6 Volts?
(2 marks) (iii) What voltage does the integer 200 represent? (2 marks)
(iv) What voltage does 1010101101 represent? (2 marks)
(d) If the controller consists of a Digital to Analogue Converter with zero
order element in series with the processing centre which has a transfer function
2)8(
)(
s
ssGp
find the sampled-data transfer function, G(z) for the digital control system . The sampling time, T, is 0.3 seconds. (7 marks)
Total 25 marks
Please turn the page

Page 7 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
Q6 Figure Q6 (a) illustrates a rotational mechanical system with a compound gear train.
Figure Q6 (a) A rotational mechanical system
Where the first driver Gear A has 10 teeth, Gear B 20 teeth, Gear C 12 teeth and Gear D 24 teeth.
(i) If the maximum angular acceleration of the load needs to be 10 rad/s2, determine the maximum torque of the motor. (6 marks)
(ii) Determine the power needed to accelerate the whole system
from rest so that the final angular velocity of the load L is 20 rad/s. (5 marks)
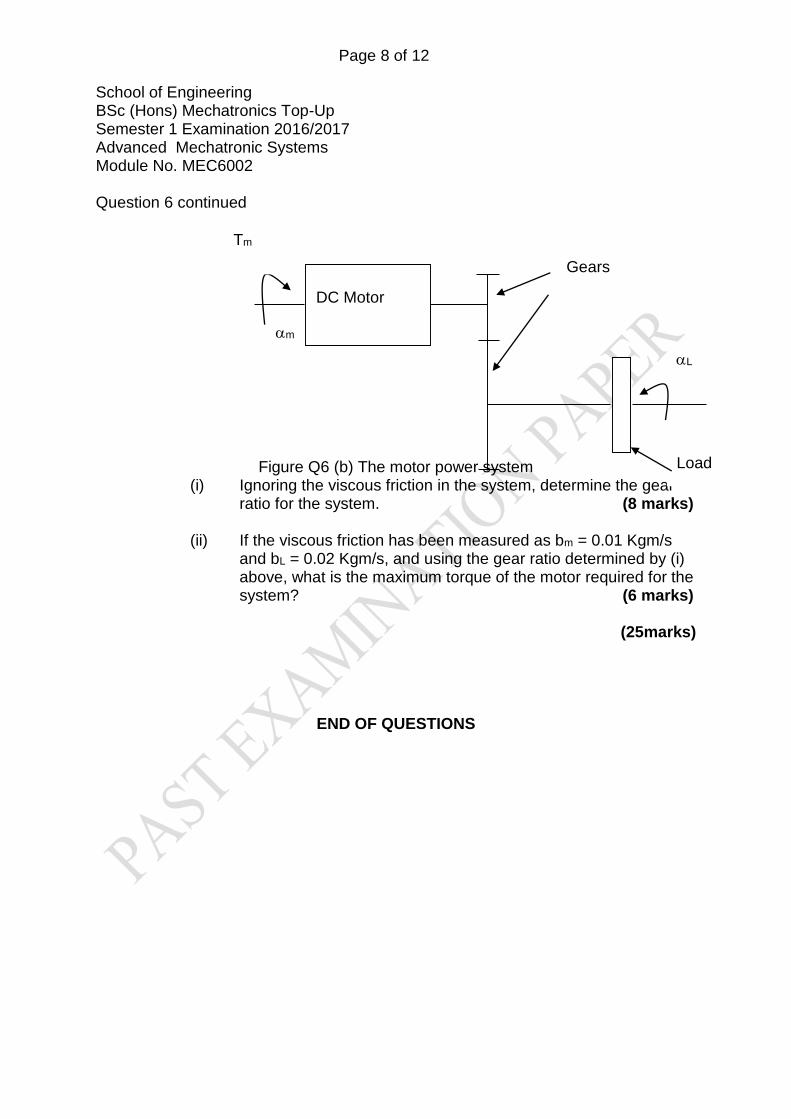
(c) A DC motor has an inertia Im of 0.01 kgm2. The nominal speed of motor is
3000 rpm and can generate a maximum torque of 15 Nm. It is connected to a uniformly distributed arm. Figure Q6 (b) shows the motor power system. The inertia of the load IL is 1.0 Kgm2, and the torque required by the load is 60 Nm.
Question 6 continued over the page
D Tm
Im = 2 Kgm2
L
IL = 48 Kgm2
A
B C
Gear Train
Page 8 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
Question 6 continued
Figure Q6 (b) The motor power system
(i) Ignoring the viscous friction in the system, determine the gear ratio for the system. (8 marks)
(ii) If the viscous friction has been measured as bm = 0.01 Kgm/s
and bL = 0.02 Kgm/s, and using the gear ratio determined by (i) above, what is the maximum torque of the motor required for the system? (6 marks)
(25marks)
END OF QUESTIONS
L
m
DC Motor
Load
Gears
Tm

Page 9 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
FORMULA SHEETS
G(s) = )()(1
)(
sHsGo
sGo
(for a negative feedback)
G(s) = )()(1
)(
sHsGo
sGo
(for a positive feedback)
Steady-State Errors
)]())(1([lim0
ssGse iOs
ss
(for an open-loop system)
)]()(1
1[lim
0s
sGse i
os
ss
(for the closed-loop system with a unity feedback)
)](
]1)()[(1
)(1
1[lim
1
10
s
sHsG
sGse i
sss
(if the feedback H(s) ≠ 1)
])1)((1
)([lim
12
2
0d
sss
sGG
sGse
(if the system subjects to a disturbance input)
Laplace Transforms A unit impulse function 1
A unit step function s
1
A unit ramp function 2
1
s
First order Systems
)1( / t
ssO eG (for a unit step input)
)1( / t
ssO eAG (for a step input with size A)
Page 10 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
Performance measures for second-order systems
dtr = 1/2
dtp =
P.O. = exp %100))1(
(2
ts = n
4
d = n(1-2)

Page 11 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002
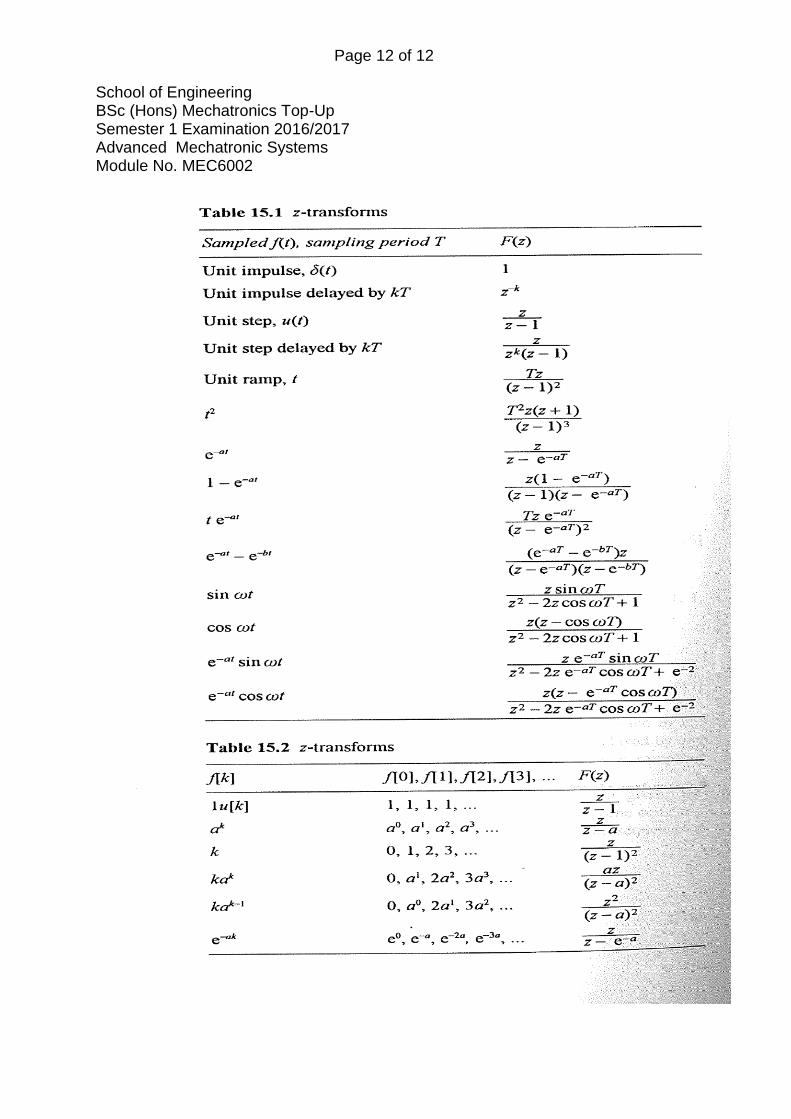
Page 12 of 12
School of Engineering BSc (Hons) Mechatronics Top-Up Semester 1 Examination 2016/2017 Advanced Mechatronic Systems Module No. MEC6002