-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
1/20
CHAPTER IV
SYNTHETIC PROJECTIVE GEOMETRY
The purpose of this chapter is to begin the study of projective
spaces, mainly from the synthetic point
of view but with considerable attention to coordinate projective
geometry.
1. Axioms for projective geometry
The basic incidence properties of coordinate projective spaces
are expressible as follows:Definition. A geometrical
incidence space (S, Π, d) is projective if the following
hold:
(P-1) : Every line contains at least three points.
(P-2) : If P and Q are
geometrical subspaces of S then
d(P Q) = d(P ) + d(Q) −
d(P ∩ Q) .
In particular, (P-2) is a strong version of the
regularity condition (G-4) introduced in SectionII.5.
The above properties were established for FPn (n ≥
2) in Theorems III.10 and III.9respectively. It is useful to
assume condition (P-1) for several reasons; for
example, lines inEuclidean geometry have infinitely
many points, and (P-1) implies a high degree
of regularityon the incidence structure that is not present in
general (compare Exercise 2 below and TheoremIV.11). — In this
connection, note that Example 2 in Section II.5
satisfies (P-2) and every linein this
example contains exactly two points.
Elementary properties of projective spaces
The following is a simple consequence of the definitions.
Theorem IV.1. If S is a
geometrical subspace of a geometrical incidence space
S , then S is a geometrical
incidence space with respect to the subspace incidence structure of
Exercise II.5.3.
If P is a projective incidence space and
d(P ) = n ≥ 1, then P
is called a projective n-space ; if
n = 2 or 1, then one also says that P is
a projective plane or projective line ,
respectively.
Theorem IV.2. If P is a
projective plane and L and
M are distinct lines in P ,
then L ∩ M consists of a single point.
Theorem IV.3. If S is a
projective 3-space and P
and Q are distinct planes in S ,
then P ∩ Qis a line.
63
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
2/20
64 IV. SYNTHETIC PROJECTIVE GEOMETRY
These follow from (P-2) exactly as Examples 1 and 2 in
Section III.4 follow from Theorem III.9.
We conclude this section with another simple but important
result:
Theorem IV.4. In the definition of a projective
space, property (P-1) is equivalent to
the following (provided the space is not a line):
(P-1) : Every plane contains a subset of four points, no
three of which are collinear.
Proof. Suppose that (P-1) holds. Let
P be a plane, and let X ,
Y and Z be noncollinearpoints in
P . Then the lines L = X Y ,
M = X Z , and
N = Y Z are distinct and contained
in P .Let W be a third point
of L, and let V be a third point
of M .
Figure IV.1
Since L and M are distinct and
meet at X , it follows that the points V , W , Y
, Z must bedistinct (if any two are equal then we
would have L = M ; note that there are six
cases to check,with one for each pair of letters taken from
W, X,Y,Z ). Similarly, if any three of these fourpoints were
collinear then we would have L = M , and
therefore no three of the points can becollinear (there are four
separate cases that must be checked; these are left to the
reader).
Conversely, suppose that (P-1) holds. Let
L be a line, and let P be a plane
containing L. Byour assumptions, there are four points
A, B, C, D ∈ P such that no three are
collinear.
Figure IV.2
Let M 1 = AB, M 2 =
BC , M 3 = CD, and
M 4 = AD. Then the lines M 1
are distinct andcoplanar, and no three of them are concurrent (for
example, M 1 ∩ M 2 = M 3 ∩ M 4,
and similarlyfor the others). It is immediate that M 1
contains at least three distinct points; namely, the
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
3/20
1. AXIOMS FOR PROJECTIVE GEOMETRY 65
points A and B plus the point where
M 1 meets M 3 (these three points
are distinct because nothree of the lines M i are
concurrent). Similarly, each of the lines M 2,
M 3 and M 4 must containat least
three points.
If L is one of the four lines described above,
then we are done. Suppose now that L is not
equalto any of these lines, and let P i be
the point where L meets M i. If at least
three of the pointsP 1, P 2, P 3, P 4 are
distinct, then we have our three distinct points on L. Since
no three of thelines M i are concurrent, it
follows that no three of the points P i can be
equal, and therefore if there are not three distinct points
among the P i then there must be two distinct
points, witheach P i equal to a unique
P j for j = i. Renaming
the M i if necessary by a suitable reordering
of {1, 2, 3, 4}, we may assume that the equal pairs are given
by P 1 = P 3 and P 2
= P 4. The drawingbelow illustrates how such a
situation can actually arise.
Figure IV.3
We know that P 1 = P 3 and
P 2 = P 4 are two distinct points
of L, and Figure IV.3 suggests thatthe point Q
where AC meets L is a third point
of L. To prove this, we claim it will suffice
toverify the following statements motivated by Figure IV.3:
(i) The point A does not lie on L.(ii) The line
AC is distinct from M 1 and
M 2.
Given these properties, it follows immediately that the three
lines AC , M 1 and M 2 —
which allpass through the point A which does not lie on
L — must meet L in three distinct points
(seeExercise 4 below).
Assertion (i) follows because A ∈ L
implies
A ∈ M 2 ∩ L = M 4
∩ M 2 ∩ L
and since A ∈ M 1 ∩ M 2
this means that M 1, M 2, and
M 4 are concurrent at A. However, weknow this is
false, so we must have A ∈ L. To prove assertion
(ii), note that
if AC = M 1 = AB,
then A , B , C are collinear, and the same
conclusion will hold if AC = M 2
= BC . Since thepoints A , B , C
are noncollinear by construction, it follows that (ii)
must also hold, and asnoted above this completes the proof that
L has at least three points.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
4/20
66 IV. SYNTHETIC PROJECTIVE GEOMETRY
EXERCISES
1. Let (S, Π, d) be an n-dimensional projective
incidence space (n ≥ 2), let P be a
plane in S ,and let X ∈ P .
Prove that there are at least three distinct lines in
P which contain X .
2. Let n ≥ 3 be an integer, let
P be the set {0, 1, · · · ,
n}, and take the family of subsetsL whose elements are
{1, · · · , n} and all subsets of the
form {0, k}, where k > 0. Show that(P, L) is a
regular incidence plane which satisfies (P-2) but not
(P-1). [Hint: In this case(P-2) is equivalent
to the conclusion of Theorem IV.2.]
3. This is a generalization of the previous exercise.
Let S be a geometrical incidence space
of dimension n ≥ 2, and let
∞S be an object not belonging to
S (the axioms for set theory giveus explicit
choices, but the method of construction is unimportant). Define
the cone on S tobe S • =
S ∪ {∞S }, and define a subset Q
of S
• to be a k-planes of S • if and only
if eitherQ is a k-plane
of S or Q = Q0 ∪
{∞S }, where Q0 is a (k − 1)-plane in
S (as usual, a 0-planeis a set consisting of
exactly one element). Prove that S • with these
definitions of k-planes is ageometrical incidence (n +
1)-space, and that S • satisfies (P-2) if
and only if S does. Explain
why S •
does not satisfy (P-1) and hence is not
projective.4. Let (P, L) be an incidence plane, let L
be a line in P , let X be a
point in P which doesnot lie on L, and
assume that M 1, · · · M k are
lines which pass through X and meet L
in pointsY 1, · · · Y k
respectively. Prove that the points Y 1, · · ·
Y k are distinct if and only if the
linesM 1, · · · M k are distinct.
5. Let (S, Π, d) be a regular incidence space of
dimension ≥ 3, and assume that every plane
inS is projective (so it follows that (P-1)
holds). Prove that S is projective. [Hint:
Since S isregular, condition (P-2)
can only fail to be true for geometrical subspaces Q
and R such thatQ ∩ R = ∅.
If d(R) = 0, so that R consists of a
single point, then condition (P-2) holds byTheorem
II.30. Assume by induction that (P-2) holds whenever
d(R0) ≤ k − 1, and supposethat d(R)
= k. Let R0 ⊂ R be (k −
1)-dimensional, and choose y ∈ R such that
y ∈ R 0. Showthat Q R0 ⊂ Q R, and
using this prove that d(Q R) is equal to d(Q) + k
or d(Q) + k + 1.The latter is the conclusion we
want, so assume it is false. Given x ∈ Q, let
x R denote the join of {x} and
R, and define y Q similarly. Show that
x R ∩ Q is a line that we shall callL, and also
show that R ∩ y Q is a line that we shall
call M . Since L ⊂ Q and
M ⊂ R, itfollows that L ∩
M = ∅. Finally, show that x R
∩ y Q is a plane, and this plane containsboth L
and M . Since we are assuming all planes in
S are projective, it follows that L ∩
M isnonempty, contradicting our previous conclusion
about this intersection. Why does this implythat d(Q R) =
d(Q) + k + 1?]
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
5/20
2. DESARGUES’ THEOREM 67
2. Desargues’ Theorem
In this section we shall prove a synthetic version of a
fundamental result of plane geometrydue to G. Desargues
(1591–1661). The formulation and proof of Desargues’ Theorem show
that
projective geometry provides an effective framework for proving
nontrivial geometrical theorems.
Theorem IV.5. (Desargues’ Theorem)
Let P be a projective incidence space of
dimension at least three, and
let {A,B,C } and {A, B,
C } be triples of noncollinear points such that the
lines AA, B B and CC are concurrent at
some point X which does not belong to either
of {A,B,C }and {A, B, C }. Then the
points
D ∈ BC ∩ BC
E ∈ AC ∩ AC
F ∈ AB ∩ AB
are collinear.
Figure IV.4
Proof. The proof splits into two cases, depending upon
whether or not the sets {A,B,C } and{A, B, C }
are coplanar. One feature of the proof that may seem
counter-intuitive is that thenoncoplanar case is the easier one. In
fact, we shall derive the coplanar case using the validityof the
result in the noncoplanar case.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
6/20
68 IV. SYNTHETIC PROJECTIVE GEOMETRY
CASE 1. Suppose that the planes determined
by {A,B,C } and {A, B,
C } are distinct. Thenthe point
X which lies on AA, BB and
CC cannot lie in either plane. On the other hand,it follows
that the points {A, B, C } lie in the 3-space
S determined by {X,A,B,C },
andtherefore we also know that the planes ABC and
ABC are contained in S . These two planesare
distinct (otherwise the two triples of noncollinear points would be
the same), and hence their
intersection is a line. By definition, all three of the
points D,E , F all lie in the intersection
of the two planes, and therefore they all lie on the two
planes’ line of intersection.
CASE 2. Suppose that the planes determined
by {A,B,C } and {A, B,
C } are identical. Theidea is to realize the given
configuration as the photographic projection of a similar
noncopla-nar configuration on the common plane. Since photographic
projections onto planes preservecollinearity, this such a
realization will imply that the original three points D ,E
,F are allcollinear.
Under the hypothesis of Case 2, all the points under
consideration lie on a single plane we shallcall P .
Let Y be a point not on P , and let
Z ∈ AY be another. Consider the
line A Z ; since A
and Z both lie on the plane AX Y ,
the whole line A Z lies in AX Y .
Thus A Z and XY meet ina point we
shall call Q.
Figure IV.5
Consider the following three noncoplanar triangle pairs:
(i) C QB and CY B.
(ii) C QA and CY A.
(iii) BQA and BY A.
Since AA, BB and CC all meet at
X , the nonplanar case of the theorem applies in all
threcases. Let G ∈ B Y ∩ B Q and
H ∈ C Y ∩ C Q, and note
that Z ∈ AR ∩ AQ. Then the truthof the
theorem in the noncoplanar case implies that each of the
triples
{D ,H ,G}, {F ,Y ,G}, {E ,H ,Z }
is collinear.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
7/20
2. DESARGUES’ THEOREM 69
Let P be the plane DF Z . Then G ∈ P
by the collinearity of the second triple, and hence
H ∈ P
by the collinearity of the first triple. Since Z,
H ∈ P , we have
E ∈ P by the collinearity of thethird
triple. All of this implies that
E ∈ P ∩ P =
DF
which shows that the set {D ,E ,F } is
collinear.
Definition. A projective plane P is said
to be Desarguian if Theorem 5 is always valid in
P .
By Theorem 5, every projective plane that is isomorphic to a
plane in a projective space of higherdimension is Desarguian. In
particular, if F is a skew-field, then FP2 is
Desarguian because FP2
is isomorphic to the plane in FP3 consisting of all points
having homogeneous coordinates in F4
of the form (x1, x2, x3, 0). In Section 4 we shall note
that, conversely, every Desarguian planeis isomorphic to a plane in
a projective 3-space.
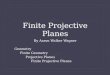
An example of a non-Desarguian projective plane (the
Moulton plane )1 can be given by takingthe real
projective plane RP2 as the underlying set of points, and
modifying the definition of lines as follows: The new lines
will include the line at infinity, all lines which have
slope ≤ 0
or are parallel to the y -axis, and the broken lines
defined by the equationsy = m(x − a), x ≤
a (i.e., y ≤ 0)
y = 12
m(x − a), x ≥ a (i.e., y
≥ 0)
where m > 0. As the points at infinite of the
latter lines we take those belonging to y =
m(x−a).A straightforward argument shows that the axioms for a
projective plane are satisfied (seeExercise 4 below). However, as
Figure IV.6 suggests, Desargues’ Theorem is false in this
plane.
Figure IV.6
1Forest Ray Moulton (1872–1952) was an American scientist
who worked mostly in astronomy but is also
recognized for his contributions to mathematics.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
8/20
70 IV. SYNTHETIC PROJECTIVE GEOMETRY
Informally speaking, Desargues’ Theorem fails to hold for some
projective planes because there isnot enough room in
two-dimensional spaces to apply standard techniques. 2 Perhaps
surprisingly,there are several other significant examples of
geometrical problems in which higher dimensionalcases (say n
≥ N , where N depends upon
the problem) are simpler to handle than lowerdimensional ones (see
the paper of Gorn for another example).
Finally, we note that Theorems II.27–29 are basically special
cases of Desargues’ Theorem.
EXERCISES
1. Explain why the results mentioned above are
essentially special cases of Desargues’ Theorem.
2. Is it possible to “plant ten trees in ten rows of
three?” Explain your answer using Desargues’Theorem.3
3. Explain why each of the following pairs of triangles
in Euclidean 3-space satisfies thehypotheses of Desargues’
Theorem.
(i) Two coplanar triangles such that the lines joining the
corresponding vertices are par-allel.
(ii) A triangle and the triangle formed by joining the midpoints
of its sides.
(iii) Two congruent triangles in distinct planes whose
corresponding sides are parallel.
4. Prove that the Moulton plane (defined in the notes) is
a projective plane.
2For an example of a finite Non-Desarguian
plane. see pages 158–159 of Hartshorne’s book.3For more information
on the relevance of projective geometry to counting and arrangement
problems, see
Section IV.3.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
9/20
3. DUALITY 71
3. Duality
By the principle of duality ... geometry is at one stroke
[nearly] doubled in extent with no
expenditure of extra labor, — Eric Temple Bell
(1883–1960), Men of Mathematics 4
Consider the following fundamental properties of projective
planes:
(1) Given two distinct points, there is a unique line containing
both of them.
(1∗) Given two distinct lines, there is a unique point contained
in both of them.
(2) Every line contains at least three distinct points.
(2∗) Every point is contained in at least three distinct
lines.
The important point to notice is that Statement (n∗) is obtained
from Statement (n) by inter-changing the following words and
phrases:
(i) point ←→ line
(ii) is contained in ←→ contains
Furthermore, Statement (n) is obtained from Statement (n∗) by
exactly the same process. Sincethe four properties (1) −
(1∗) and (2) − (2∗) completely characterize
projective planes (seeExercise 1 below), one would expect that
points and lines in projective planes behave somewhatsymmetrically
with respect to each other.
This can be made mathematically precise in the following manner:
Given a projective plane
(P, L), we define a dual plane (P ∗, L∗) such
that P ∗ is the set L of lines in
P and L∗ is in 1–1correspondence with
P . Specifically, for each x ∈
P we define the pencil of lines with
vertex xto be the set
p(x) = { L ∈ L = P ∗ |
x ∈ L } .
In other words, L ∈ p(x) if and only
if X ∈ L. Let P ∗∗ denote
the set of all pencils associatedto the projective plane whose
points are given by P and whose lines are given by
P ∗.
Theorem IV.6. If (P, P ∗)
satisfies properties (1) −(1∗) and (2)
−(2∗), then (P ∗, P ∗∗) also does.
Proof. There are four things to check:
(a) Given two lines, there is a unique pencil containing both of
them.
(a∗) Given two pencils, there is a unique line contained in both
of them.
(b) Every pencil contains at least three lines.
(b∗) Every line is contained in at least three pencils.
4See the bibliography for more information and comments on this
book.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
10/20
72 IV. SYNTHETIC PROJECTIVE GEOMETRY
However, it is clear that (a) and (a∗) are rephrasings of (1∗)
and (1) respectively, and likewise(b) and (b∗) are rephrasings of
(2∗) and (2) respectively. Thus (1) − (1∗) and
(2) − (2∗) for(P ∗, P ∗∗) are logically
equivalent to (1) − (1∗) and (2) − (2∗) for (P, P ∗).
As indicated above, we call (P ∗, P ∗∗) the dual
projective plane to (P, P ∗).
By Theorem 6 we can similarly define P ∗∗∗ to be the
set of all pencils in P ∗∗, and it followsthat
(P ∗∗, P ∗∗∗) is also a projective plane. However,
repetition of the pencil construction doesnot give us anything new
because of the following result:
Theorem IV.7. Let (P, P ∗)
be a projective plane, and let p0 :
P → P ∗∗ be the map sending
a point x to the pencil p(x)
of lines through x. Then p0
defines an isomorphism of incidence planes
from (P, P ∗) to the double dual projective
plane (P ∗∗, P ∗∗∗).
Proof. By construction the map p0 is onto. It
is also 1–1 because p(x) = p(y) implies everyline
passing through x also passes through y. This is
impossible unless x = y.
This it remains to show that L is a line in
P if and only if p(L) is a line in
P ∗∗
. But lines inP ∗∗ have the form
p(L) = { w ∈ P ∗∗ | L ∈
p(x) } .
where L is a line in P . Since L
∈ p(x) if and only if x ∈ L, it
follows that p(x) ∈ p(L) if and
onlyif x ∈ L. Hence p(L) is the image
of L under the map p0, and thus the latter is
an isomorphismof (projective) geometrical incidence planes.
The preceding theorems yield the following important phenomenon
5 which was described in thefirst paragraph of this section; it was
discovered independently by J.-V. Poncelet (1788–1867)and J.
Gergonne (1771–1859).
Metatheorem IV.8. (Principle of Duality) A
theorem about projective planes remains true if one
interchanges the words point and line
and also the phrases contains
and is contained in.
The justification for the Duality Principle is simple. The
statement obtained by making theindicated changes is equivalent
to a statement about duals of projective
planes which correspondsto the original statement
for projective planes . Since duals of projective planes are
also projectiveplanes, the modified statement must also hold.
Definition. Let A be a statement about
projective planes. The dual statement is the
oneobtained by making the changes indicated in Metatheorem 8, and
it is denoted by D(A) or A ∗.
EXAMPLE 1. The phrase three points are
collinear (contained in a common single line)
dualizesto three lines are concurrent (containing a
common single point).
EXAMPLE 2. The property (P-1), which assumes the
existence of four points, not threeof which are collinear, dualizes
to the statement, There exist four lines, no three of which
are concurrent. This statement was shown to follow from
(P-1) in the course of proving Theorem4.
5This is called a Metatheorem because it is really a
statement about mathematics rather than a
theoremwithin mathematics itself. In other words it is a
theorem about theorems .
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
11/20
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
12/20
74 IV. SYNTHETIC PROJECTIVE GEOMETRY
Figure IV.7
By construction, the lines B C ,
BC and DF all meet at
E . Therefore Desargues’ Theoremapplies to the triples {
C , C, F } and { B, B, D}, and hence we may
conclude that the threepoints
X ∈ BB ∩ CC
G ∈ BD ∩ CF H ∈
BD ∩ C F
are collinear. Using this, we obtain the following additional
conclusions:
(1) B, D ∈ γ , and therefore
γ = BD.
(2) B, D ∈ γ , and therefore
γ = B D.
(3) C, F ∈ β , and therefore
β = C F .
(4) C , F ∈ β , and
therefore β = C F .
Therefore G ∈ γ ∩ β and
H ∈ γ ∩ β . Since the common
points of these lines are A and A bydefinition,
we see that X , A and A are collinear. In
other words, we have X ∈ AA∩BB
∩CC ,and hence the three lines are concurrent, which is what
we wanted to prove.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
13/20
3. DUALITY 75
Duality and finite projective planes
We shall illustrate the usefulness of duality by proving a few
simple but far-reaching resultson projective planes which contain
only finitely many points. We have already noted that foreach prime
p there is a corresponding projective plane
Z
pP2. As noted below, these are more
than abstract curiosities, and they play an important role in
combinatorial theory (the study of counting principles) and
its applications to experimental design and error-correcting
codes.
By Theorem 9, it follows that a projective plane is finite if
and only if its dual plane is finite.In fact, one can draw much
stronger conclusions.
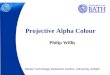
Theorem IV.11. Let P be a
finite projective plane. Then all lines in
P contain exactly the same number of points.
Proof. Let L and M be the
lines. Since there exist four point, no three of which are
collinear,there must exist a point p which belongs to
neither L nor M .
Figure IV.8
Define a map f : L →
M by sending x ∈ L to the
point f (x) where px meets M .
It is astraightforward exercise to verify that f
is 1–1 and onto (see Exercise 6 below).
Dualizing the preceding, we obtain the following conclusion.
Theorem IV.12
. Let P be a finite projective plane.
Then all points in P are contained in
exactly the same number of lines.
Observe that the next result is self-dual, with the dual
statement logically equivalent to theoriginal one.
Theorem IV.13. Let P be a
finite projective plane. Then the number of points on each line
is equal to the number of lines containing each point.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
14/20
76 IV. SYNTHETIC PROJECTIVE GEOMETRY
Proof. Let L be a line in
P and let x ∈ L. Define a map
from lines through x to points on Lby sending a
line M with x ∈ M to
its unique intersection point with L. It is again a
routineexercise to show this map is 1–1 and onto (again see
Exercise 6 below).
Definition. The order of a finite
projective plane is the positive integer n ≥ 2
such that every
line contains n + 1 points and every point lies on n +
1 lines. The reason for the subtracting onefrom the common number
is as follows: If F is a finite field with
q elements, then the order of FP2 will be equal to
q .
The results above yield the following interesting and
significant restriction on the number of points in a finite
projective plane:
Theorem IV.14. Let P be a
finite projective plane of order n.
Then P contains exactly n
2+n+1points.
In particular, for most positive integers m it is
not possible to construct a projective plane
withexactly m points. More will be said about the
possibilities for m below.
Proof. We know that n + 1 is the number or
points on every line and the number of linesthrough every point.
Let x ∈ P . If we count all pairs (y, L)
such that L is a line through x andy ∈
L, then we see that there are exactly (n + 1)2 of them. In
counting the pairs, some pointssuch as x may appear
more than once. However, x is the only point which does
so, for y = ximplies there is only one line
containing both points. Furthermore, by the preceding result weknow
that x appears exactly n + 1 times. Therefore the
correct number of points in P is givenby
subtracting n (not n + 1) from the number of
ordered pairs, and it follows that P
containsexactly
(n + 1)2 − n = n2 + n + 1
distinct points.
The next theorem follows immediately by duality.
Theorem IV.15. Let P be a
finite projective plane of order n.
Then P contains exactly n
2+n+1lines.
Further remarks on finite projective planes
We shall now consider two issues raised in the preceding
discussion:
(1) The possible orders of finite projective planes.
(2) The mathematical and nonmathematical uses of finite
projective planes.
ORDERS OF FINITE PROJECTIVE PLANES. The theory of finite
fields is completely understoodand is presented in nearly every
graduate level algebra textbook (for example, see Section V.5of the
book by Hungerford in the bibliography). For our purposes it will
suffice to note that foreach prime number p and each
positive integer n, there is a field with exactly
q = pn elements.It follows that every
prime power is the order of some projective plane .
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
15/20
3. DUALITY 77
The possible existence of projective planes with other orders is
an open question. However,many possible orders are excluded by the
following result, which is known as the Bruck–Ryser–Chowla
Theorem: Suppose that the positive integer n
has the form 4k + 1 or 4k +
2for some positive integer k. Then n is the
sum of two (integral) squares .
References for this result include the books by Albert and
Sandler, Hall (the book on grouptheory), and Ryser in the
bibliography as well as the original paper by Bruck-Ryser (also in
thebibliography) and the following online reference6:
http://www.math.unh.edu/∼dvf/532/7proj-plane.pdf
Here is a list of the integers between 2 and 100 which cannot be
orders of finite projective planesby the Bruck-Ryser-Chowla
Theorem:
6 14 21 22 30 33 38 42
45 46 54 57 62 66 69 70
74 77 78 82 86 93 94 97
The smallest positive integer ≥ 2 which is not a
prime power and not excluded by the Bruck-Ryser-Chowla Theorem is
10. In the late nineteen eighties a substantial argument —
whichused sophisticated methods together with involved massive
amounts of computer calculations— showed that no projective planes
of order 10 exist. Two papers on this work are listed in
thebibliography; the article by one author (C. W. H. Lam) in
the American Mathematical Monthly was written to explain
the research on this problem to a reasonably broad general audience
of mathematicians and students.
By the preceding discussion, the existence of projective planes
of order n is understood forn ≤ 11, and
the first open case is n = 12. Very little is known
about this case.
PROJECTIVE GEOMETRY AND FINITE CONFIGURATIONS. Of course,
one can view existenceproblems about finite projective planes as
extremely challenging puzzles similar to Magic Squares(including
the Sudoku puzzles that have recently become extremely
popular), but one importantreason for studying them is their
relevance to questions of independent interest.
One somewhat whimsical “application” ( plant ten trees in
ten rows of three ) was mentioned inExercise IV.2.2, where the
point was that such configurations exist by Desargues’ Theorem.
Infact, the study of projective spaces — especially finite ones –
turns out to have many usefulconsequences in the study of finite
tactical configurations or block
designs , which is part of combinatorial
theory or combinatorics . Specifically,
finite projective planes are of interest asexamples of
Latin squares , or square matrices whose entries are in a
finite set such that eachelement appears in every row and every
column exactly once. As noted earlier, such objects playa
significant role in the areas of statistics involving the design of
experiments and in the theory of error-correcting codes.
Although further comments are well outside the scope of these
notes, thereferences in the bibliography by Buekenhout, Crapo and
Rota, Hall (the book on combinatorialtheory), Kárteszi, Lindner
and Rodgers, and (the previously cited book by) Ryser are all
sourcesfor further information. There are also several online web
sites dedicated to questions aboutfinite geometry.
6To update this document, the conjecture of E. Catalan
(1814–1894) has recently been shown to be truebu P. Mihăilescu.
The proof is at a very advanced level, but for the sake of
completeness here is a reference:P. Mihăilescu, Primary
cyclotomic units and a proof of Catalan’s Conjecture ,
[Crelle] Journal für die reine undangewandte Mathematik
572 (2004), 167–195.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
16/20
78 IV. SYNTHETIC PROJECTIVE GEOMETRY
Duality in higher dimensions
The concept of duality extends to all projective n-spaces
(where n ≥ 2), but the duality is morecomplicated
for n ≥ 3 than it is in the 2-dimensional
case. Specifically, if S is a
projectiven-space, then points of the dual space S ∗ are
given by the hyperplanes of S .
for each k-plane
P in S , there is an associated
(linear) bundle of hyperplanes with center P ,
which we shalldenote by b(P ), and the dimension
of b(P ) is set equal to n − k − 1. We shall
also denote theset of all such bundles by Π∗ the associated
dimension function by d∗. The following result isthe
appropriate generalization of Theorems 6 and 7 which allows
extension of the principle of duality to higher
dimensions.
Theorem IV.16. If (S, Π, d) is a
projective n-space for some n ≥
2, then so is the dual object (S ∗, Π∗, d∗).
Furthermore, the map E sending x
∈ S to the bundle of
hyperplanes b(x) with center x
defines an isomorphism of geometrical incidence spaces.
We shall not give a direct proof of this result for two
reasons.
1. Although the proof is totally elementary, it is a
rather long and boring sequence of routine verifications.
2. The result follows from a coordinatization theorem in
the next section (Theorem 18)and the results of Section VI.1, at
least if n ≥ 3 (and we have already done
the casen = 2).
An excellent direct proof of Theorem 16 is given in Sections 4.3
and 4.4 of Murtha and Willard,Linear Algebra and
Geometry (see the bibliography for further
information).
EXERCISES
1. Prove that properties (1) − (1∗) and (2) − (2∗)
completely characterize projective planes. Inother words, if (P, L)
is a pair consisting of a set P and a nonempty
collection of proper subsetsL satisfying these, then there is
a geometrical incidence space structure (P, L, d) such that
theincidence space is a projective plane and L is the
family of lines in Π.
2. Write out the plane duals of the following phrases,
and sketch both the given data and theirplane duals.
(i) Two lines, and a point on neither line.
(ii) Three collinear points and a fourth point not on the line
of the other three.
(iii) Two triples of collinear points not on the same line.(iv)
Three nonconcurrent lines, and three points such that each point
lies on exactly one of
the lines.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
17/20
3. DUALITY 79
3. Draw the plane duals of the illustrated finite sets of
points which are marked heavily in thetwo drawings below.
Figure IV.9
4. Suppose that f :
S → T is an incidence space
isomorphism from one projective n-space(n ≥ 2) to
another. Prove that f induces a 1–1 correspondence
f ∗ : S ∗ → T ∗ taking a
hyperplaneH ⊂ S to the image hyperplane
f ∗(H ) = f [H ]
⊂ T . Prove that this correspondence has the
property that B is an r-dimensional bundle of
hyperplanes (in S ∗) if and only
if f ∗[B] is sucha subset of T ∗
(hence it is an isomorphism of geometrical incidence spaces,
assuming Theorem16).
5. Prove that the construction in the preceding exercise
sending f to f ∗ has the
followingproperties:
(i) If g : T
→ U is another isomorphism of projective
n-spaces, then (g of )∗ = g∗ o
f ∗.
(ii) For all choices of S the map
(idS )∗ is equal to the identity on S ∗.
(iii) For all f we have
f −1 ∗
=
f ∗−1
.
6. Complete the proof of Theorem 11.
7. Let (P, L) be a finite affine plane. Prove that there
is a positive integer n such that
(i) every line in P contains exactly
n points,
(ii) every point in P lies on exactly n
lines,
(iii) the plane P contains exactly n2
points.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
18/20
80 IV. SYNTHETIC PROJECTIVE GEOMETRY
4. Conditions for coordinatization
Since the results and techniques of linear algebra are
applicable to coordinate projective
n-spacesS 1(V ) (where dim
V = n + 1), these are the most conveniently
studied of all projective spaces.
Thus it is desirable to know when a projective n-space is
isomorphic to one having the formS 1(V ), where dim
V = n + 1. The following remarkable
theorem shows that relatively weakhypotheses suffice for the
existence of such an isomorphism.
Theorem IV.17. Let P be a
projective n-space in which Desargues’ Theorem is valid
(for exam-ple, n ≥ 3
or P is a Desarguian plane). Then
there is a skew-field F such
that P is isomorphic to FPn
(where we view Fn+1 as a right vector space
over F. If E is another skew-field such
that P is isomorphic to EPn,
then E and F are isomorphic as
skwe-fields.
A well-illustrated proof of Theorem 17 from first principles in
the case n = 2 appears on pages175–193 of the book by
Fishback listed in the bibliography. Other versions of the proof
appearin several other references from the bibliography. Very
abstract approaches to the theorem whenn = 2 appear in Chapter
III of the book by Bumcrot and also in the book by Artzy. The
proof in Chapter 6 of Hartshorne’s book combines some of the
best features of the other proofs. Thereis also a proof of Theorem
17 for arbitrary values of n ≥ 2 in
Chapter VI from Volume I of Hodge and Pedoe. Yet another
reference is Sections 4.6 and 4.7 of Murtha and Willard. Formore
information on the uniqueness statement, see Theorem V.10.
Theorem 17 yields a classification for projective
n-spaces (n ≥ 3) that is parallel to TheoremII.38 (see
Remark 3 below for further discussion). Because of its importance,
we state thisclassification separately.
Theorem IV.18. Let P be a
projective n-space, where n ≥
3. Then there is a skew-field
F, unique up to algebraic isomorphism, such that
P and FPn
are isomorphic as geometrical incidence spaces.
Theorem 17 also implies the converse to a remark following the
definition of a Desarguianprojective plane in Section IV.2.
Theorem IV.19. If a projective plane is
Desarguian, then it is isomorphic to a plane in
a projective 3-space.
Proof. By Theorem 17, the plane is isomorphic to
FP2 for some skew-field F. But FP2 isisomorphic to
the plane in FP3 defined by x4 = 0.
REMARK 1. Suppose that P is the Desarguian
plane FP2. By Theorem 10, P ∗ is also Desarguianand hence
is isomorphic to some plane EP2. As one might expect, the
skew-fields F and E areclosely related. In
fact, by Theorem V.1 the dual plane P ∗ is isomorphic
to S 1(F3), where F3 isa left
vector space over F, and left vector spaces over
F correespond to right vector spaces overthe
opposite skew-field FOP, whose elements are the same as
F and whose multiplication isgiven by reversing the
multiplication in F. More precisely, one defines a new
product ⊗ in Fvia a ⊗ b = b
· a, and if V is a left vector space
over F define vector space operations via thevector
addition on F and the right scalar product x ⊗ a
= a · x (here the dot represents the
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
19/20
4. CONDITIONS FOR COORDINATIZATION 81
original multiplication). It is a routine exercise to check that
FOP is a skew-field and ⊗ makesleft
F-vector spaces into right vector spaces over FOP. Thus,
since F3 is a 3-dimensional rightFOP-vector space, it
follows that E must be isomorphic to FOP.
REMARK 2. If P is the coordinate
projective plane FP2 and multiplication in F is
commutative,then the preceding remark implies
that P and P ∗ are isomorphic because F
and FOP are identicalin such cases. However, the reader should be
warned that the isomorphisms from P to
P ∗ aremuch less “natural” than the standard
isomorphisms from P to P ∗∗ (this is
illustrated byExercise V.1.5). More information on the
noncommutative case appears in Appendix C.
EXAMPLE 3. Theorem II.18 follows from Theorem 18. For
if S is an affine n-space, let
S be its synthetic projective extension as defined in
the Addendum to Section III.4. By TheoremIII.16, we know that
S is an n-dimensional projective incidence
space, so that S is isomorphicto FPn for
some skew-field F and S ⊂
S is the complement of some hyperplane. Since
there isan element of the geometric symmetry group
of FPn taking this hyperplane to the one definedby
xn+1 = 0 (see Exercise III.4.14), we can assume that
S corresponds to the image of F
n inFP
n. Since k-planes in S are given by
intersections of k-planes in S with
S and similarly thek-planes in Fn are given
by intersections of k-planes in FPn with the image
of F, it follows thatthe induced 1–1 correspondence
between S and Fn is a geometrical incidence space
isomorphism.
A general coordinatization theory for projective planes that are
not necessarily Desarguianexists; the corresponding algebraic
systems are generalizations of skew-fields known as
planar ternary rings . Among the more accessible
references for this material are the previously citedbook by Albert
and Sandler, Chapter 4 of the book by Artzy, Chapters III and VI of
the bookby Bumcrot, and Chapter 17 of the book by Hall on group
theory. One of the most importantexamples of a planar ternary ring
(the Cayley numbers) is described on pages 195–196
of Artzy7 As one might expect, the Cayley numbers (also called
octonions ) are associated to aprojective plane called
the Cayley projective plane .
7One brief and accurate online summary is given in
http://en.wikipedia.org/wiki/Octonion. The relia-bility issue for
Wikipedia articles is discussed in a footnote for Appendix C, and
it also applies here.
-
8/20/2019 University California Riverside (Department of
Mathematics). IV Synthetic Projective Geometry
20/20