Embed Size (px)
Citation preview

Universidad Nacional de San Juan
Facultad de Ingeniería
Asignatura: Aplicaciones Industriales de ultrasonido
Trabajo Final: Sistema de desarrollo para ultrasonido
Alumnos: Gabriel, CañadasCarlos, Dell’Aquila
-2013-

Contenido1. Introducción.................................................................................................................................1
2. Objetivos ......................................................................................................................................1
3. Introducción al ultrasonido: Procedimiento pulso-eco ...............................................................1
4. Diagrama de bloques del sistema................................................................................................2
5. Amplificador AD604 .....................................................................................................................3
5.1 Introducción al AD604 .........................................................................................................3
5.2 Circuito implementado ........................................................................................................4
5.3 Ensayos y conclusiones ..............................................................................................................5
6. Microcontrolador MSP430F169...................................................................................................6
6.1 Introducción al microcontrolador........................................................................................6
6.2 Herramientas de desarrollo ......................................................................................................6
6.3 Conclusiones sobre el MCU .................................................................................................7
7 Filtro pasa-banda activo...............................................................................................................7
7.1 Metodología de diseño ........................................................................................................7
7.2 Resultados y Conclusiones.................................................................................................10
8 Software PC................................................................................................................................10
9 Diseño y Construcción de la placa .............................................................................................11
11 Bibliográfica ...........................................................................................................................12
Anexo I: Circuito esquemático del sistema.......................................................................................13
Anexo II: Código del Microcontrolador..............................................................................................14

Cañadas, Dell’Aquila Ultrasonido 1
1. Introducción
Este trabajo trata del diseño y construcción de un sistema de desarrollo deultrasonido para ensayos no destructivos, por el procedimiento pulso-eco.
El sistema consta de un amplificador de dos etapas, de gran ancho de banda yelevada ganancia. Esta última se puede variar a través de una señal de control. Es uncircuito integrado (CI) específico para trabajar con ultrasonido, denominado AD604 de lafirma Analog Device.
La ganancia del amplificador es controlada por tensión, a través de unmicrocontrolador. Este también controla la activación del PULSER, el nivel de tensión deeste y la comunicación con la computadora (PC).
La interfaz con la computadora está prevista para, a través de un software,indicarle al sistema un perfil de ganancia en función del tiempo que debe seguir elamplificador.
La salida del amplificador ingresa a un filtro activo pasabanda de 1-5Mz, estopermite trabajar con palpadores de ese rango de frecuencia. Se utilizaron amplificadoresoperacionales THS3201 de la firma Texas Instruments.
La construcción del sistema permite la fácil conexión al PULSER de la cátedra deultrasonido y de los palpadores por medio de conectores para cable coaxial.
2. Objetivos
El objetivo general del trabajo es un sistema que sea flexible y fácil de conectarcon otros sistemas para trabajar con ultrasonido.
Como objetivo particular se destaca la implementación del amplificador de altorendimiento AD604 de la firma Analog Device.
3. Introducción al ultrasonido: Procedimiento pulso-eco
En este procedimiento se utilizan impulsos reflejados, para evaluación de defectosu obstáculos. El oscilador piezoeléctrico cumple la función de emisor y receptor. Unimpulso eléctrico de corta duración genera una onda ultrasónica. Inmediatamentedespués mientras aún se está propagando la onda, el mismo oscilador está listo para larecepción. La onda sonora penetra en el material, hasta, como resultado de una superficielímite, tiene lugar para una reflexión parcial o total.
Si la superficie reflectante se encuentra perpendicularmente a la dirección depropagación de la onda sonora, esta es reflejada en su primitiva reflexión y al cabo de untiempo determinado, que depende de la velocidad del sonido en el material objeto deensayo y de la distancia que existe entre el oscilador y la superficie reflectante, llega devuelta al oscilador, siendo reconvertida en un impulso eléctrico.

Cañadas, Dell’Aquila Ultrasonido 2
No toda la energía que regresa es convertida en energía eléctrica, sino que en lainterfaz entre el palpador y la superficie de la pieza tiene lugar de nuevo una reflexiónparcial; una parte el sonido atraviesa por segunda vez la pieza, y así sucesivamente, deeste modo se origina una sucesión de ecos. La energía recibida en el palpador se vaatenuando en el tiempo, pero la forma de los pulsos se mantiene.
Puesto que se puede medir el tiempo de recorrido y se conoce la velocidad delsonido de la mayor parte de los materiales, éste método permite establecer la distanciaexistente entre el oscilador y la superficie reflectante, o dicho de otro modo, determinar laposición del reflector. Por esto es que se emplea este método en la mayoría de los casos.Agréguese a ello que no hay más que una sola superficie de acoplamiento (que esatravesada en el viaje de ida y de vuelta) entre el oscilador y la pieza, por lo que resultamucho más sencillo mantener constante el acoplamiento.
Con este procedimiento resulta muy conveniente utilizar un amplificador deganancia variable a la entrada del receptor para acentuar los puntos interés en la mediciónatenuar los puntos que no aportan información.
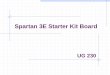
4. Diagrama de bloques del sistema
La
Figura 1: Diagrama de Bloques del sistema es un diagrama en bloques del sistemadesarrollado. En el mismo se observa los módulos que se conectan al sistema como esel PULSER, PC y palpador.

Cañadas, Dell’Aquila Ultrasonido 3
Amplificador AD604 Filtro PasabandaActivo (1-5MHz)
Salida Amplificada
MicrocontroladorMSP430F169
Control de Ganancia
Palpador(1-5MHz)
Pulser
Activación y Control de tensión de salida
Transmisión Serie(RS232)PC
Sistema Desarrollado
SALIDA
Figura 1: Diagrama de Bloques del sistema
5. Amplificador AD604
5.1 Introducción al AD604
El AD604 es un amplificador de dos canales de ganancia variable, optimizado paratrabajar con señales de ultrasonido.
Se puede variar la ganancia de cada etapa de manera independiente ylinealmente en función de la tensión aplicada a los pines destinados para tal fin (VGN). LaFigura 2 muestra el esquema de un canal.
Figura 2: Un canal del AD604
Cada etapa posee un preamplificador con una ganancia seleccionable entre 14dB y

Cañadas, Dell’Aquila Ultrasonido 4
20dB, con valores intermedios, de acuerdo como se interconecten los pines PAOx y FBKx.Lo que se hace es variar la resistencia del lazo de realimentación del preamplificador.
La ganancia que tiene el amplificador de entrada DSX+x y salida OUTx varía de -14dB a +34.4 dB y depende de la tensión en el pin de control de ganancia (VGN).
La ganancia resultante de cada canal queda definida por la siguiente ecuación.G (dB) = (Gain Scaling (dB/V) × VGN (V)) + (Preamp Gain (dB) – 19 dB)
El factor de escala de ganancia (dB/V) queda fijado por la tensión de referencia enel pin VREF. Varia de 20dB/V a 40dB/V para tensiones de referencia VREF de 2.5v a 1.25v,respectivamente.
Para el caso que el preamplificador se configure con la máxima ganancia, laresultante podrá variarse de 6dB a 54.4dB en función de la tensión en el pin VGN.
Si el preamplificador se fija en la mínima ganancia, la resultante podrá variarse de0dB a 48.4dB.
5.2 Circuito implementadoLa Figura 3 muestra el circuito esquemático de conexión del AD604 con todos los
componentes externos para su funcionamiento. Los canales se han conectado en cascada.El preamplificador de cada uno se ha fijado en 14dB, la tensión de referencia VREF es 2.5volt.
Figura 3: Conexión del amplificador AD604

Cañadas, Dell’Aquila Ultrasonido 5
Como el sistema de ultrasonido trabaja en el modo pulso eco, en necesarioproteger la entrada del amplificador. Para esto se implementó un divisor resistivo paraatenuar la tensión que se obtiene del palpador y dos diodos conectados en “antiparalelo”para asegurarse que la tensión a la entrada del amplificador no va a superar la tensión deconducción de los mismo (0.7 volt).
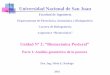
5.3 Ensayos y conclusionesEn laboratorio, con un generador de señales, se realizó un “barrido” de frecuencias
dentro del rango de operación del amplificador. La señal de entrada era de baja amplitud(en el orden de 1mv) y contaminada con ruido propio del generador y el entorno. A lasalida se obtuvo una señal en el orden de 1 volt y la forma de onda era una tipo seno biendefinida, como la que debe entregar el generador de señales.
El mismo ensayo se realizó para distintas frecuencias dentro del rango deoperación del sistema.
Las Figura 4 muestra una de las gráficas tomadas durante el ensayo, con unosciloscopio. La señal de entrada se señala con color amarillo y es la más ruidosa. La señalde salida es de color celeste con componente fundamental de 2 MHz.
En los ensayos realizados la ganancia se fijó en un valor bajo, debido a que elgenerador de señales no permite señales de muy bajo nivel, debido al ruido que estemismo introduce.
Figura 4: Respuesta del amplificador AD604
El mismo ensayo se realizó para distintas frecuencias dentro del rango deoperación del sistema y se concluye que tiene una respuesta constante para el rango de

Cañadas, Dell’Aquila Ultrasonido 6
operación requerido. También se pudo apreciar que el alto rechazo al modo común queposee el amplificar, debido a que a la salida se obtiene una onda seno bien definida.
6. Microcontrolador MSP430F169
6.1 Introducción al microcontrolador
El microcontrolador (MCU) utilizado es el MSP430F169 de la firma TexasInstruments.
Como se dijo en la introducción de este informe el MCU se utiliza, entre otrascosas, para controlar la ganancia del amplificador. Para ello dispone de un conversordigital-analógico (DAC), el cual permite convertir a tensión un valor binario que fija elprograma interno del MCU.
El MCU también se utiliza para disparar el módulo externo PULSER y seleccionar latensión de salida. Esto se logra a través de pines de salida digitales.
También el MCU posee un módulo que permite realizar comunicación serieasincrónica, que junto con el CI MAX232 se puede lograr comunicar el MCU con una PC através de una comunicación RS232.
6.2 Herramientas de desarrollo
Para depurar y grabar el algoritmo en el MCU se utilizó una interfaz JTAG de lafirma Texas Instruments denominada MSP-FET430UIF. En el anexo I está el circuitoesquemático de todo el sistema, en el cual se puede ver como conectar el MCU alprogramador. La Figura 5 es una imagen de la interfaz.
Figura 5: Interfaz JTAG

Cañadas, Dell’Aquila Ultrasonido 7
El algoritmo del MCU se programó en lenguaje C y el compilador utilizado es el IARKickStart. Es una versión gratuita de IAR, que solo permite compilar hasta 4Kb deprograma. Si bien es limitado, es suficiente para esta aplicación.
Otra opción en cuanto al entorno de programación es el CodeComposerStudio(CCS) de Texas Instruments y posee una versión libre limitada en código, la cual essuficiente para el sistema desarrollado.
Ambos entornos de desarrollos se pueden descargar de la página web delfabricante. Además Texas Instruments provee un conjunto de librerías denominadasMSP430Ware, que permite de una manera amigable poder programar el MCU e incluyeejemplos para cada periférico del MCU.
En el anexo II se adjunta el código implementado en el MCU junto con suscomentarios correspondiente.
Toda la documentación y ejemplos para trabajar con el MCU MSP430F169, sepuede obtener de la web (http://www.ti.com/product/msp430f169). Para conocer suarquitectura, uso de los periféricos, registros y demás se aconseja consultar el manualprincipal (http://www.ti.com/lit/ug/slau049f/slau049f.pdf).
6.3 Conclusiones sobre el MCU
En el circuito no se observar un circuito de reloj para el MCU, porque este posee unoscilador interno y es opcional el uso de uno externo. Este último se utilizará solo cuandose requiera mayor precisión en la temporización.
La elección de este MCU se debió a que ya han sido utilizados para otros desarrollos, haydocumentación y ejemplos de código. También se consiguen en el mercado local(http://www.arrowar.com/) y se pueden pedir muestras a Texas Instruments desde laweb.
El encapsulado del MCU es de 64 pines de montaje superficial, por lo que hizo faltarealizar un circuito impreso con buena precisión.
7 Filtro pasa-banda activo
7.1 Metodología de diseño
Una vez determinados los requerimientos del filtro en cuanto a ancho de banda yfrecuencia central (filtro pasabanda de 1-5Mhz), el primer paso fue seleccionar unamplificador operacional que fuera adecuado para trabajar en el rango de frecuencia delfiltro.

Cañadas, Dell’Aquila Ultrasonido 8
El amplificador operacional (OA) utilizado es el THS3201, el cual tiene un ancho debanda a ganancia unitaria de 1.8 GHz, factor de slew-rate 6700 V/µ y tensión dealimentación ±3.3v a ±7.5v.
Un vez seleccionado el OA se procedió a elegir una estructura de filtro activo yluego el cálculo de los componentes. Para esto se utilizó el software FilterPRO, en elmismo se introducen los requerimientos del filtro, el tipo de respuesta en frecuencia(Butterworth, en nuestro caso) y la topología del circuito a utilizar (de realimentaciónmúltiple para este trabajo). El programa nos devuelve el valor de los componenteselectrónicos pasivos.
Como el filtro es de gran ancho de banda, se implementó un filtro pasa-alto confrecuencia de corte en 1Mhz y un pasa-bajo con frecuencia de corte en 5Mhz, ambosconectados en cascada.
La Figura 6 muestra una captura de pantalla del software FilterPro con el filtropasa-alto calculado y la Figura 7 para el pasa-bajo.
Figura 6: Filtro pasa-alto

Cañadas, Dell’Aquila Ultrasonido 9
Figura 7: Filtro pasa-bajo
Con los datos de diseño obtenidos, se realizó una simulación del comportamientode los filtros. El software utilizado es SIMetrix/SIMPLIS, permite simular la respuesta delos circuitos en base al modelo SPICE.
En la simulación se obtuvo la respuesta en frecuencia del filtro, la corriente y latensión de la salida de cada etapa del filtro pasabanda.
Los valores de tensión y corriente de salida se analizaron para saber si no sesuperaban los valores máximos recomendados por el fabricante.
La Figura 8 muestra la tensión la tensión y corriente. Con las mediciones que serealizaron en la simulación se puedo determinar que no se superan los valores máximosde operación del OA.
Figura 8: Gráfica de tensión y corriente a la salida del AO dese 1KHz a 20MHz.
La Figura 9 muestra un diagrama esquemático de los filtros, pasa-bajo y pasa-alto,conectados en cascada.

Cañadas, Dell’Aquila Ultrasonido 10
Figura 9: Circuito completo de los filtros
7.2 Resultados y Conclusiones
Si bien los resultados obtenidos en la simulación fueron satisfactorios en lapráctica no sucedió lo mismo.
Cuando se realizaron ensayos de los filtros surgió el inconveniente de elevadatemperatura en los amplificadores operacionales y los reguladores de tensión de lafuente de alimentación. Esto de una idea de excesivo consumo de corriente.
Además la salida en la banda de paso del filtro tenía una atenuación constantesuperior a la obtenida en simulación.
Si bien se tuvieron en cuenta todas las recomendaciones de la hoja de datos delTHS3201, no se logró obtener un buen funcionamiento de los filtros.
8 Software PC
Las pruebas de comunicación entre el sistema y la PC se realizaron con el entornode trabajo MatLab. Se carga un arreglo de datos con todos los datos a enviar al MCU yluego con una función propia de MatLab se envían los datos a través del puerto serie.
A continuación una forma básica de conectarse al puerto serial utilizando MatLab.

Cañadas, Dell’Aquila Ultrasonido 11
9 Diseño y Construcción de la placa
El diseño del circuito impreso se realizó con el software EAGLE, es simple deutilizar. Además la mayoría de los fabricantes de CI proveen las librerías para diseñar lasplacas con sus productos.
Para la construcción del circuito impreso se utilizó material fotosensible. La placade cobre virgen se cubre con una lámina de ese material. Luego con una filmina con elnegativo del circuito impreso, se expone a luz ultravioleta con una insoladora.
Con una sustancia química que provee el fabricante de las láminas, se realiza elrevelado de la placa para luego exponerla al acido que ataca al cobre.
Finalmente con un removedor se limpia la placa y queda lista para soldar loscomponentes. La Figura 10 es el negativo del circuito impreso que se utilizó para construirla placa.

Cañadas, Dell’Aquila Ultrasonido 12
Figura 10: Negativo del circuito impreso construido
10 Conclusiones
El sistema desarrollado ha cumplido con los objetivos propuestos. El únicoinconveniente por solucionar es el de los filtros activos, que si bien se realizaron variosensayos y se tuvieron en cuenta las consideraciones sugeridas por el fabricante, no selogró su correcto funcionamiento.
El sistema de desarrollo para aplicaciones de ultrasonido puede interconectarsefácilmente a otros módulos, como es el PULSER ya sea el provisto por la cátedra deultrasonido u otro. También se puede conectar una PC y palpadores de frecuencias de1MHz a 5MHz.
El sistema sirve como punto de partida para otros proyectos y en el presenteinforme trata de resumir toda la documentación que se consultó en el diseño y tambiénde los inconvenientes que se presentaron, para optimizar tiempos de desarrollos enfuturos trabajos.
11 Bibliográfica- Hoja de datos del amplificador AD604
http://www.analog.com/static/imported-files/data_sheets/AD604.pdf- Manual de Referencia del MCU MSP430F169
http://www.ti.com/lit/ug/slau049f/slau049f.pdf- Nota de aplicación de la interface JTAG
http://www.ti.com/lit/ug/slau278n/slau278n.pdf- “Sistema de ensayo no destructivo por ultrasonido”. Abaurre, Mansilla y Gonzáles. UTN
Mendoza

Cañadas, Dell’Aquila Ultrasonido 13
Anexo I: Circuito esquemático del sistema

Cañadas, Dell’Aquila Ultrasonido 14
Anexo II: Código del Microcontrolador
/* Sistema de Ultrasonido */#include "msp430f169.h"void main(void){
WDTCTL = WDTPW + WDTHOLD; // Stop watchdog
//Configuración del clock para que trabaje a 2MHzDCOCTL = DCO2 + MOD0;BCSCTL1 |= RSEL1+RSEL2;BCSCTL2 |= DIVS1; //EL SMCLK = 1 MHZ.
//Configuración de PinP6SEL |= BIT6;P6OUT |= BIT6;
// DAC12 configurationDAC12_1DAT = 0x00; // DAC_0 output 0V
DAC12_1CTL = DAC12IR | DAC12AMP_5 | DAC12ENC; // DAC_0 -> P6.6// DAC reference Vref
// 12 bits resolution// Immediate load// DAC full scale output// Medium speed/current// Straight binary// Not grouped
//Confguracion RS232
ME1 |= UTXE0;//UART0P3SEL |= BIT6+BIT7;P3DIR |= BIT6+BIT7;
//RegistrosU0CTL |=CHAR;U0TCTL|=SSEL1;

Cañadas, Dell’Aquila Ultrasonido 15
//BaudrateU0BR0 = 0x6D;U0BR1 = 0x00;U0MCTL = 0x03; // Configuro para 9600bps
//Habilitacion de la USART0UCTL0 &= ~SWRST;
for(;;) { //Opcional si se quiere enviar el echo a la PC/*// UART0 TX buffer ready?while (!(IFG1&UTXIFG0));//UART0 Buffer = Data;U0TXBUF = 0xAA;
*/}
}//Interrupción de llegada de un nuevo dato de la transmisión serie#pragma vector = USART0RX_VECTOR
__interrupt void USCI_UART_0_RX(void){
DAC12_1DAT = U0RXBUF; // Recibe el dato del puerto Serie y lo escribe en el DAC}