Embed Size (px)
Citation preview

UNIVERSIDAD NACIONAL DE INGENIERÍA
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA
SELECCION DEL TIPO DE ARRANQUE DE UN MOTOR EN MEDIA TENSION
INFORME DE SUFICIENCIA
PARA OPTAR EL TÍTULO PROFESIONAL DE:
INGENIERO ELÉCTRICISTA
PRESENTADO POR:
ANDRES AVELINO CACERES SALINAS
PROMOCIÓN 2002-11
LIMA-PERÚ 2010
SELECCIÓN DEL TIPO DE ARRANQUE DE UN MOTOR EN MEDIA TENSION

Agradezco primeramente a mis padres que me apoyaron en todo momento; así como también a mi esposa e hijo.

SUMARIO
El presente informe de suficiencia trata el Analisis del Tipo de Arranque de un Motor de
4000 HP en Media Tensión - Motor Principal de la Planta de Plomo - DOE RUN,
Cumpliendo con las Normas Técnicas Peruanas y las Recomendaciones de las Normas
ANSI - IEEE, en donde se abarca el análisis del Arranque del Motor en estado estacionario
y en estado dinámico, observando el comportamiento de la Red Eléctrica al producirse el
Arranque del Motor.
Para el Análisis del motor se utilizo un programa computacional, en la cual se cargo la Red
eléctrica involucrada, para los parámetros de los diferentes componentes eléctricos se
utilizo diferentes métodos analíticos descritos en diferentes libros, paper y normas
internacionales.
Este análisis nos permite ver el comportamiento del motor durante el arranque, así como
determinar las caídas de tensión y niveles de armónicos en las diferentes barras de la Red
eléctrica, de esta manera podemos anticipar los posibles problemas que podrían ocurrir al
arrancar el Motor, ya sea por medio de arranque directo, autotransformador, arrancador
electrónico o un variador.
Hoy en día, es requisito en las grandes industrias hacer estos análisis para que no se ponga
en peligro las diferentes cargas al arrancar un motor grande en media tensión. Con el
análisis nos permite tomar acciones preventivas, como poner un filtro para los armónicos y
ver cuál es el mejor método para arrancar dicho motor.

PROLOGO
CAPITULO!
ANTECEDENTES
1.1
1.2
1.3
1.4
Objetivo
Alcances
Condiciones de Lugar
Características Eléctricas
CAPITULOII
CONCEPTOS BASICOS.
2.1 Def"miciones
INDICE
2.1.1 Motores de Inducción de Jaula de Ardilla Clase A
2.1.2 Motores de Inducción de Jaula de Ardilla Clase B
2.1.3 Motores de Inducción de Jaula de Ardilla Clase C
2.1.4 Motores de Inducción de Jaula de Ardilla Clase D
2.1.5 Motores de Inducción de Jaula de Ardilla Clase F
2.2 Estudio del Régimen Estático Y Dinámico de los Motores de Inducción
2.2.1 Régimen Transitorio
2.2.2 Comparación Entre la Curva ParNelocidad Estática y Dinámico
2.2.3 Características de la Doble Jaula
2.2.4 Saturación en el Arranque
2.2.5 Influencia de los Armónicos
2.2.6 Pares Asíncronos Armónicos
2.2. 7 Pares Síncronos Armónicos
2.2.8 Fuerzas Oscilantes
CAPITULO ID
ANALISIS DEL TIPO DE ARRANQUE DEL MOTOR 3.1 Herramienta Computacional
1
2
2
3
3
4
4
5
5
5
6
6
6
7
9
9
10
11
11
12
13

3.2 Datos
3.3 Circuito Equivalente del Motor
3.4 Tiempo de Arranque del Motor
3.5 Corriente y Par de Arranque
3.6 Tipos de Arranque
3.6.1 Arranque Directo
3.6.2 Arranque Estrella - Triangulo
3.6.3 Arranque con Autotransformador
3.6.4 Arranque con Resistencia
3.6.5 Arranque con Dispositivo Electrónico
3.7 Métodos de Solución
CAPITULO IV
CONFIGURACION DEL SISTEMA ELECTRICO
4.1 Descripción del Sistema Electrico
4.2 Parámetros Eléctricos
4.2.1 Parámetros del Motor 4000 HP
4.2.2 Parámetros de los Conductores
4.2.3 Parámetros de los Transformadores
4.3 Diagrama Unifilar
CAPITULO V
RESULTADOS DEL ARRANQUE DE MOTOR DE 4000 HP
5.1
5.2
Resultados de Cortocircuito
Resultados en los Diferentes Métodos de Arranque
5.2.1 Resultados Por el Método de Arranque Directo
5.2.2 Resultados Por el Método de Estrella - Triangulo
5.2.3 Resultados Por el Método de Autotransformador a 65%
5.2.4 Limite Térmico del Motor
CAPITULO VI
RESULTADOS DE ANALISIS DE ARMONICOS
6.1
6.2
Herramienta Computacional
Resultados de Armónicos
CONCLUSIONES Y RECOMENDACIONES
VII
13
13
14
15
15
15
16
16
16
16
17
18
18
18
19
19
20
21
21
21
22
23
24
30
30
37

BIBLIOGRAFIA
VIII
38

PROLOGO
El propósito de este informe es prevenir inestabilidad en las redes asociadas a un motor
grande en media tensión, el cual al ser arrancado se obtiene caídas de tensión que muchas
veces son mayores a las permitidas ocasionando inestabilidad en muchos circuitos y por
ende actuarían los circuitos de protección ocasionando paradas en varios sectores de las
redes. Los motores grandes se utilizan mucho en industrias grandes ya sea minería,
petróleo u otros, al ocasionarse paradas en algunos de sus circuitos, esto se refleja en
pérdidas de dinero los cuales es perjudicial para la empresa industrial, es por eso que antes
de arrancar un motor en media tensión es necesario ver los impactos posibles que este
puede tener en la red que involucra a las demás instalaciones dentro de la industria.
Es importante saber dentro del análisis no solo la inestabilidad del sistema, sino también
detectar el nivel de armónicos que se producen, ya que estos producen calentamiento y una
mala calidad de energía, para prevenir esto se pone filtros pasivos y activos los cuales se
pueden prever haciendo un análisis de armónicos de la red con el motor de media tensión.
En este informe abarcaremos cual es el mejor método de arranque de un motor en media
tensión, considerando sus perturbaciones.

1.1 Objetivo
CAPITULOI
ANTECEDENTES
Mostrar los criterios básicos para el análisis del arranque de un motor en media tensión.
Establecer el mejor método de arranque de un motor grande en media tensión teniendo
en cuenta las consecuencias que pueda originar en el sistema al cual está conectado. En
este informe se analizara un motor de 4000 HP, el cual es la carga principal de una
empresa industrial.
1.2 Alcances
El motor de 4000 HP, representa la carga principal en una planta de tratamiento, este
motor al iniciar su arranque necesita vencer una gran inercia de carga.
El motor al iniciar su arranque puede originar caídas de tensión mayor a las permisibles
en las barras cercanas a ella, es por eso que es necesario estudiar y analizar el mejor
método de arranque de este motor.
El arranque de un motor puede ser por el método de arranque directo, autotransformador,
arrancador electrónico o variador de velocidad. Se analizara los diferentes métodos con el
fin de ver la mejor solución sin perturbar las redes asociadas a este motor.
La herramienta computacional utilizada para los cálculos en el presente proyecto de tesis
será el software EDSA 20005, debido a las facilidades que presenta para trabajar con los
modelos matemáticos aplicados al arranque de motores.
1.3 Condiciones de Lugar
• Altitud sobre el nivel del mar en La Oroya:
• Temperatura máxima del aire:
• Temperatura promedio del aire:
• Temperatura mínima del aire:
• Velocidad máxima del viento:
• Dirección del Viento:
• Temperatura de diseño eléctrico:
3720m
128.6 ºC
10.4 ºC
-8.9 ºC
70mph
Variable
40º C

1.4 Características Eléctricas
Las características eléctricas del suministro de energía se mencionan a continuación:
• Niveles de tensión: 50kV
11 kV
4.16 kV
0.48 kV
• Frecuencia: 60 Hz
• Máximo Corto Circuito trifásico a 1 lkV: 31.5 KA
• Máximo Corto Circuito fase-Tierra a: O. lkA
• Regulación de frecuencia: +/- 1 % de 60 Hz como base, bajo
condiciones normales.
• Regulación de voltaje: La máxima fluctuación de voltaje será
+/-5% [6].
3
• La caída de voltaje admisible en condiciones de arranque de motor no debe exceder
al 15% [6].
• La caída de voltaje admisible en condiciones normales, no debe exceder los valores
mostrados en la Tabla 1:
Tabla 1: Valores máximos permisibles de caída de Tensión.
Distribución Primaria (1 lkV) 5 %
Distribución secundaria 4.16KV, y 480 V) 4%
Bornes Motor 3%

2.1 Definiciones
CAPITULOII
CONCEPTOS BASICOS
Para distinguir entre diversos tipos disponibles, la National Eléctrical Manufacturers
Association (NEMA) [1] ha desarrollado un sistema de identificación con letras en la
cual cada tipo de motor comercial de inducción de jaula de ardilla se fabrica de acuerdo
con determinada norma de diseño y se coloca en determinada clase, identificada con
una letra. Las propiedades de la construcción eléctrica y mecánica el rotor, en las cinco
clases NEMA de motores de inducción de jaula de ardilla, se resume en la siguiente
tabla:
Tabla 2: Características de los Motores Comerciales de Inducción de Jaula de
Ardilla de Acuerdo con la Clasificación NEMA.
Clase Par de arranque Corriente Regulación de
NEMA ( # de veces el de Velocidad
nominal) Arranque (%)
A 1.5-1.75 5-7 2-4
B 1.4-1.6 4.5-5 3.5
c 2-2.5 3.5-5 4-5
D 2.5-3.0 3-8 5-8 , 8-13
F 1.25 2-4 mayor de 5
2.1.1 Motores de Inducción de Jaula de Ardilla Clase A
Nombre de clase
Del motor
Normal
De propósito general
De doble jaula alto par
De alto par alta resistencia
De doble jaula, bajo par y
corriente de arranque.
baja
El motor clase A es un motor de jaula de ardilla normal o estándar fabricado para uso a
velocidad constante. Tiene grandes áreas de ranuras para una muy buena disipación de
calor, y barras con ranuras ondas en el motor. Durante el periodo de arranque, la

5
densidad de corriente es alta cerca de la superficie del rotor; durante el periodo de la
marcha, la densidad se distribuye con uniformidad. Esta diferencia origina algo de alta
resistencia y baja reactancia de arranque, con lo cual se tiene un par de arranque entre
1.5 y 1.75 veces el nominal (a plena carga). El par de arranque es relativamente alto y la
baja resistencia del rotor produce una aceleración bastante rápida hacia la velocidad
nominal. Tiene la mejor regulación de velocidad pero su corriente de arranque varía
entre 5 y 7 veces la corriente nominal normal, haciéndolo menos deseable para arranque
con línea, en especial en los tamaños grandes de corriente que sean indeseables.
2.1.2 Motores de Inducción de Jaula de Ardilla Clase B
A los motores de clase B a veces se les llama motores de propósito general; es muy
parecido al de la clase A debido al comportamiento de su deslizamiento-par. Las ranuras
de su motor están embebidas algo más profundamente que los motores de clase A y esta
mayor profundidad tiende a aumentar la reactancia de arranque y la marcha del rotor.
Este aumento reduce un poco el par y la corriente de arranque.
Las corrientes de arranque varían entre 4 y 5 veces la corriente nominal en los tamaftos
mayores de 5 HP se sigue usando arranque a voltaje reducido. Los motores de clase B se
prefieren sobre los de la clase A para tamaftos mayores.
Las aplicaciones típicas comprenden las bombas centrífugas de impulsión, las máquinas
herramientas y los sopladores.
2.1.3 Motores de Inducción de Jaula de Ardilla Clase C
Estos motores tienen un rotor de doble jaula de ardilla, el cual desarrolla un alto par de
arranque y una menor corriente de arranque.
Debido a su alto par de arranque, acelera rápidamente, sin embargo cuando se emplea en
grandes cargas, se limita la disipación térmica del motor por que la mayor parte de la
corriente se concentra en el devanado superior.
En condiciones de arranque frecuente, el rotor tiene tendencia a sobre calentarse se
adecua mejor a grandes cargas repentinas pero de tipo de baja inercia.
Las aplicaciones de os motores de clase C se limitan a condiciones en las que es difícil
el arranque como en bombas y compresores de pistón
2.1.4 Motores de Inducción de Jaula de Ardilla Clase D
Los motores comerciales de inducción de jaula de ardilla clase D se conocen también
como de alto par y alta resistencia. Las barras del rotor se fabrican en aleación de alta

6
resistencia y se colocan en ranuras cercanas a la superficie o están embebidas en ranuras
de pequeño diámetro.
La relación de resistencia a reactancia del rotor de arranque es mayor que en lo motores
de las clases anteriores.
El motor está diseñado para servicio pesado de arranque, encuentra su mayor aplicación
con cargas como cizallas o troqueles, que necesitan el alto par con aplicación a carga
repentina la regulación de velocidad en esta clase de motores es la peor.
2.1.5 Motores de Inducción de Jaula de Ardilla Clase F
También conocidos como motores de doble jaula y bajo par. Están diseñados
principalmente como motores de baja corriente, porque necesita la menor corriente de
arranque de todas las clases. Tiene una alta resistencia del rotor tanto en su devanado de
arranque como en el de marcha y tiende a aumentar la impedancia de arranque y de
marcha, y a reducir la corriente de marcha y de arranque.
El rotor de clase F se diseño para remplazar al motor de clase B. El motor de clase F
produce pares de arranque aproximadamente 1.25 veces el par nominal y bajas corrientes
de arranque de 2 a 4 veces la nominal. Los motores de esta clase se fabrican de la
capacidad de 25 hp para servicio directo de la línea. Debido a la resistencia del rotor
relativamente alta de arranque y de marcha, estos motores tienen menos regulación de
voltaje de los de clase B, bajan capacidad de sobrecarga y en general de baja eficiencia
de funcionamiento. Sin embargo, cuando se arrancan con grandes cargas, las bajas de
corrientes de arranque eliminan la necesidad de equipo para voltaje reducido, aún en los
tamaños grandes
2.2 Estudio del Régimen Estático Y Dinámico de los Motores de Inducción
Para el estudio del régimen estático y estacionario de los motores de inducción se debe de
tener en cuenta el régimen transitorio, la equivalencia de la curva par/velocidad en
condiciones estáticas y dinámicas, análisis en el arranque, la influencia de los armónicos
y otros conceptos que se detallan a continuación.
2.2.1 Régimen Transitorio
La energía total de un sistema, cualquiera que éste sea: mecánico, eléctrico,
electromecánico, etc., no puede variar bruscamente, ni es posible pasar de una forma de
energía a otra forma de energía instantáneamente. Este principio en los circuitos
eléctricos se expresa diciendo que no es posible pasar de un estado de régimen
permanente a otro estado permanente de una manera instantánea o discontinua.
7
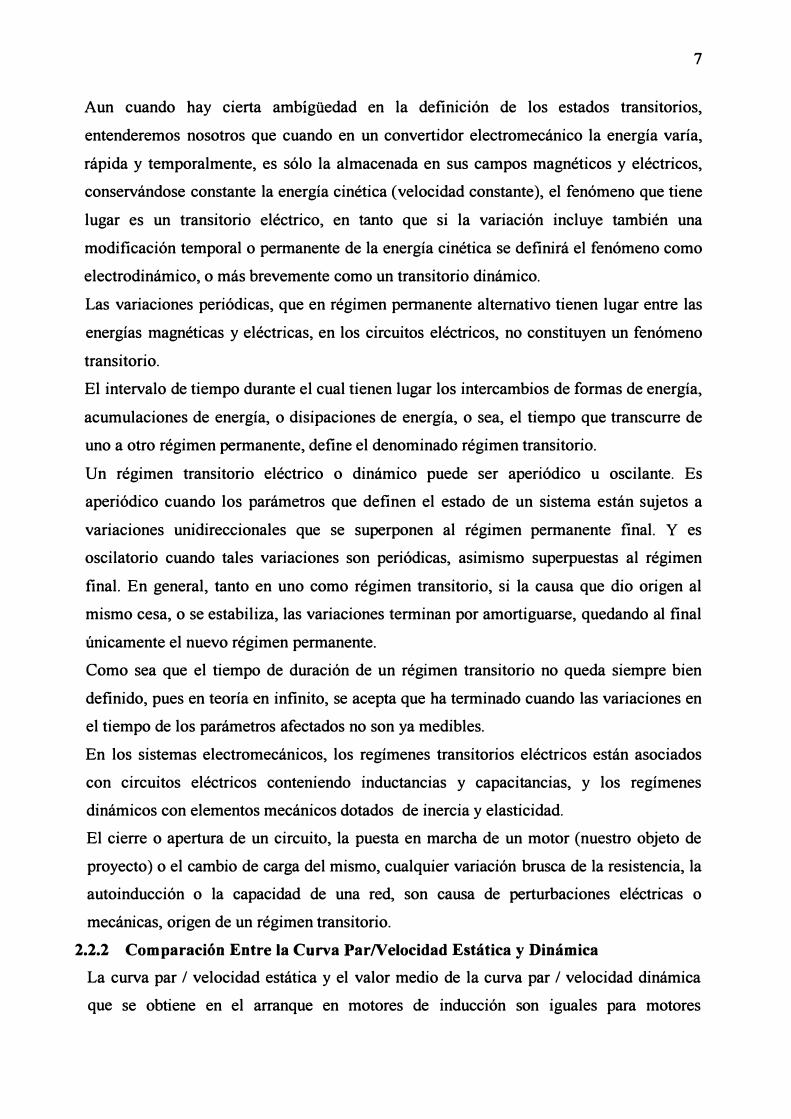
Aun cuando hay cierta ambígüedad en la definición de los estados transitorios,
entenderemos nosotros que cuando en un convertidor electromecánico la energía varía,
rápida y temporalmente, es sólo la almacenada en sus campos magnéticos y eléctricos,
conservándose constante la energía cinética ( velocidad constante), el fenómeno que tiene
lugar es un transitorio eléctrico, en tanto que si la variación incluye también una
modificación temporal o permanente de la energía cinética se definirá el fenómeno como
electrodinámico, o más brevemente como un transitorio dinámico.
Las variaciones periódicas, que en régimen permanente alternativo tienen lugar entre las
energías magnéticas y eléctricas, en los circuitos eléctricos, no constituyen un fenómeno
transitorio.
El intervalo de tiempo durante el cual tienen lugar los intercambios de formas de energía,
acumulaciones de energía, o disipaciones de energía, o sea, el tiempo que transcurre de
uno a otro régimen permanente, define el denominado régimen transitorio.
Un régimen transitorio eléctrico o dinámico puede ser aperiódico u oscilante. Es
aperiódico cuando los parámetros que definen el estado de un sistema están sujetos a
variaciones unidireccionales que se superponen al régimen permanente final. Y es
oscilatorio cuando tales variaciones son periódicas, asimismo superpuestas al régimen
final. En general, tanto en uno como régimen transitorio, si la causa que dio origen al
mismo cesa, o se estabiliza, las variaciones terminan por amortiguarse, quedando al final
únicamente el nuevo régimen permanente.
Como sea que el tiempo de duración de un régimen transitorio no queda siempre bien
definido, pues en teoría en infinito, se acepta que ha terminado cuando las variaciones en
el tiempo de los parámetros afectados no son ya medibles.
En los sistemas electromecánicos, los regímenes transitorios eléctricos están asociados
con circuitos eléctricos conteniendo inductancias y capacitancias, y los regímenes
dinámicos con elementos mecánicos dotados de inercia y elasticidad.
El cierre o apertura de un circuito, la puesta en marcha de un motor (nuestro objeto de
proyecto) o el cambio de carga del mismo, cualquier variación brusca de la resistencia, la
autoinducción o la capacidad de una red, son causa de perturbaciones eléctricas o
mecánicas, origen de un régimen transitorio.
2.2.2 Comparación Entre la Curva ParN elocidad Estática y Dinámica
La curva par / velocidad estática y el valor medio de la curva par / velocidad dinámica
que se obtiene en el arranque en motores de inducción son iguales para motores

8
pequeflos, pero para motores grandes, principalmente debido a los transitorios eléctricos
en los circuitos del rotor, el par máximo de la curva estática es mucho más grande que el
correspondiente a la curva dinámica. Para máquinas pequeflas, después del transitorio
eléctrico referente a los devanados de estator se extingue, la curva par / velocidad
dinámica es idéntica a la estática. En la figura se puede ver que en la región del principio
en la característica dinámica hay oscilaciones, algunas de ellas negativas. Cerca del punto
de vacío la característica estática coge su valor máximo, la característica dinámica tiene
valores más bajos.
El transitorio electromagnético tiene una influencia significativa sobre la característica
par / velocidad de la máquina de inducción. Aunque asumamos que el proceso transitorio
pasa con el rotor bloqueado este desaparece antes que la máquina comience a rotar, las
corrientes del motor durante la rotación se retrasarán respecto las corrientes que circulan
en el caso estático y de este modo el par electromagnético dinámico del motor a una
velocidad intermedia no será igual al obtenido en la característica estática. Un análisis
aproximado cualitativo puede ser llevado a cabo asumiendo que el motor comienza por el
estado estático, por ejemplo, primero el rotor está bloqueado y cuando el transitorio
desaparece, se deja rotar.
te ['p.u.]
3
----, '
' _____ ,
o
Fig 1: Curva ParN elocidad de un Motor
s

9
2.2.3 Característica de la Doble Jaula.
En los motores de inducción a partir de una determinada potencia, aproximadamente 5-6
kW, se les diseña el rotor con una ranura especial denominada doble jaula. Esta ranura se
caracteriza por proporcionar un par de arranque más elevado. Cuando se realiza el
circuito equivalente del motor de inducción de doble jaula, si el secundario (parte del
rotor, doble jaula) se reduce al primario, en el momento de simular las curvas
características de este, se pierde información y los resultados no son correctos. Para ello
se deben introducir dos factores que simulen el efecto de la doble jaula este efecto
también se le denomina efecto de desplazamiento de la corriente. Los valores de
resistencias y reactancias que se obtienen del programa de cálculo son reducidas al
primario y no se saben los valores por separado de la jaula interior y de la exterior. Por
tanto se aplicará un factor para simular la variación de la resistencia del rotor y otro
factor para simular la variación de la reactancia del rotor.
2.2.4 Saturación en el Arranque.
La predeterminación de la curva de saturación en cortocircuito es muy importante para el
diseño de los motores de inducción de doble jaula. La razón es porque esta curva se
desvía de la linealidad y coge forma de codo
En el diseño de motores de doble jaula es importante un método de cálculo de la curva de
saturación en cortocircuito para asegurar la determinación valores fiables de intensidad y
par de arranque, así como en el resto de la curva Par- Intensidad/ Velocidad, sobretodo
en motores grandes donde la intensidad se mantiene prácticamente igual a la de
cortocircuito hasta el punto donde se encuentra el par máximo. Esta curva de saturación,
expresa el valor de intensidad de cortocircuito para diferentes valores de tensión de
alimentación, tiende a curvarse hacia arriba, y es la desviación respecto la curva lineal la
que se tratará en este capítulo.
Los motores de inducción han sido siempre populares por su simplicidad y su falta de
problemas en funcionamiento, pero la alta corriente que consumen en el momento del
arranque ha sido un puntó de críticas. Estas criticas propiciaron la creación de dos jaulas
de ardilla; estos motores se nombraron motores de "arranque-lineal". Uno se
caracterizaba de tener una corriente de arranque baja y de un par de arranque normal y el
segundo de una corriente de arranque baja y un elevado par de arranque.
El problema para el diseñador de estos motores es obtener el par de arranque requerido
con la corriente de arranque baja y al mismo tiempo mantener la resistencia del rotor

10
suficientemente baja para prevenir que la velocidad en carga no decaiga mucho por
debajo de la velocidad de sincronismo.
Si la corriente de arranque de cualquier motor fuese exactamente proporcional a la
tensión aplicada, luego, asumiendo que las formulas de las reactancias usadas son fiables,
darían una clasificación de diseño en la que la corriente de arranque estaría cercana al
límite fijado y el par de arranque, consecuentemente testado, cercano al valor calculado.
De todas maneras, rara vez pasará que, la corriente de arranque sea exactamente
proporcional a la tensión aplicada y si se traza la característica se encontrará que la
corriente aumenta más rápido que no lo hace la tensión.
Ahora si se supone que las formulas de reactancias dan resultados fiables para la parte
baja de la curva, luego el valor de la corriente de arranque calculado para la tensión
nominal será más bajo que en el ensayo, con la posibilidad que en el ensayo se excedan
los limites garantizados.
Suponer que para encontrar esta eventualidad se asume que la corriente se incrementa un
cierto porcentaje y que el par de arranque garantizado se determinará si la corriente hace
este incremento; luego, la curva de saturación en cortocircuito debería ser más derecha
que la estimada, el par de arranque disminuirá un poco respecto la cantidad garantizada.
Para encontrar la corriente límite si la curva se dobla hacia arriba, y al mismo tiempo el
par límite si la curva es recta, es en la mayoría de casos imposible, ya que la corriente
normalmente sube hasta el límite cuando el motor entrega el par requerido. Como la
tendencia ha sido reducir el número primario de ranuras al mínimo para disminuir los
costes de producción, esta situación ha llegado a ser más pronunciada, ya que la curva de
saturación en cortocircuito es más recta a mayor número de ranuras.
2.2.5 Influencia de los Armónicos.
La onda de f.m.m. de p pares de polos, creada por un devanado polifásico estatórico, o
rotórico, no es una senoide pura, sino una onda periódica, más o menos escalonada. Si se
aplica la descomposición en serie de Fourier, resulta una onda senoidal de vp pares de
polos, siendo v el orden del armónico de estator.
La interacción entre dos ondas de f.m.m. armónicas, una de estator y una de rotor
provocarán diferentes tipos de pares, dependiendo de la diferencia del orden del
armónico de estator y rotor. Estos pares son:
• Pares asíncronos armónicos
• Pares síncronos armónicos

11
• Fuerzas oscilantes
2.2.6 Pares Asíncronos Armónicos.
Los pares asíncronos se originan cuando una onda armónica de rotor interacciona con
una de estator de la misma polaridad. Las ondas, por tanto, son producidas por el mismo
orden armónico. Estos pares solo dependen de los armónicos de estator.
Los pares asíncronos tienen una gran influencia en los motores medianos ya que son los
responsables que se produzca el bache de la curva-velocidad, también denominado valle.
En motores pequefios y grandes estos armónicos no tienen mucho efecto sobre la curva
ya que hay efectos que se sobreponen a este, por ejemplo, en motores grandes tiene más
influencia la forma de la ranura que no los pares asíncronos provocados por el número de
ranuras.
M
1 e
--
,., 0,2 o -s
0,6n,
Fig 2: Curva de la Onda de Campo Fundamental y de los Armónicos Quinto y
Séptimo.
2.2. 7 Pares Síncronos Armónicos.
Los pares síncronos se originan cuando una onda armónica de rotor, creada por una onda
armónica de estator más una de rotor, interacciona con una de estator de ± el mismo
orden de armónico. Las ondas, por tanto, son producidas por diferente armónico.
Para limitar los puntos muertos debidos a los pares síncronos y hacerlos en lo posible
inoperantes, debe tenerse en cuenta, al proyectar el motor, que los números de ranuras de
estator y del rotor no cumplan la condición anterior.

12
2.2.8 Fuerzas Oscilantes.
Se originan por la interacción de dos ondas de campo, en general entre dos ondas de
����º��������������
campo de estator y una de rotor, el orden de ambos campos presenta una diferencia de
una o dos unidades. Las fuerzas oscilantes provocan deformaciones del estator,
provocando como consecuencia ruido. Este ruido se acentuará más cuantas más ranuras
tenga el estator debido a que se tendrá menos chapa y por tanto será menos rígido.
En la figura siguiente se muestra una curva dinámica en la cual se pueden ver algunos de
los armónicos que se han comentado. No se puede apreciar muy bien debido a que la
señal no es ideal.
800.0
700.0
6000
500.0
400.0
e
e JOO.o
2000
100.0
00
-1000
-200.0
--·-
-
_l
.. ·--
- A
_Q�rv�-�ai:-lntensidc!:d / Velocidad! - . -- ..
/--
\
rJ J -
ír�
1 �J � í\ (\/ �i\ .. l/\ �·-A f\ {\ (\ J rl'I ¡· 1
-
-
-1
310
lJ V vv '
1
620 930 1240
º\ \. o··v"t lfJ.--i,ÁJ_..,r� .. �'::l,,,.fo:�'.r.-'f�· •'r,v,,..,
1550 Velocid.Jd lrpm)
1860 2110
··-.. ,,,
2480
Fig 3: Curva Intensidad Par/ Velocidad
'o __
. l. t
27!ll
1
'
-2000.0
1900 O
1800.0
1700.0
1€000
1500.0
1400.0
13000
1200 O _
-----
--1100.0 f
-
-
-
-----
1000 O !:!
900.0 >
800.0 -
700.0
600.0
500.0
401)0
300.0
200.0
1000
o.o3100

CAPITULO ID ANALISIS DEL TIPO DE ARRANQUE DEL MOTOR
3.1 Herramienta Computacional
Para el Análisis del arranque del motor se usara el programa EDSA, el cual contiene un
modulo llamado Advanced Motor Starting Analysis.
El programa incorpora el procedimiento que se describe en el libro Brown de la IEEE
para el arranque del motor mediante el modelo del Motor de flujo de potencia.
3.2 Datos
Los datos necesarios para el análisis del motor son los siguientes:
• Impedancias y Rangos del Motor.
• Momento de Inercia de la Carga y el Motor.
• Características de Carga del motor.
• Escenario de Partida del Ivfotor.
3.3 Circuito Equivalente del Motor
El circuito equivalente del motor con el cual se la herramienta EDSA realiza su análisis
es el siguiente:
[R
2(s)+ JX
2(s)]* jX
111
Z = s +R +JX1110, R�(s) . _ 1 1
---+ JX2(s)+ 1X111 s
Fig 4: Circuito Equivalente de Motor.
R 1 Resistencia del estator.
(1)
Xl Incluye la reactancia de la ranura, la de cabeza de bobina y la Doblemente

concatenada del estator.
Xm Reactancia de magnetización.
R2 Resistencia del rotor.
X2 Incluye la reactancia de la ranura, la de cabeza de bobina y la Doblemente
concatenada de los anillos y la de inclinación de ranura.
s Deslizamiento.
14
La impedancia equivalente del motor (recordemos que la resistencia del rotor y la
reactancia son asumidos que son función de la velocidad en función de factores que
definen la jaula) se coloca en la barra del motor similar a un cortocircuito y se resuelve
por flujo de potencia. En todas las soluciones de flujo de potencia, la ecuación del motor
de rotación (también conocida como ecuación de oscilación) que se muestra a
continuación también se resuelve para calcular la velocidad del motor posterior al
tiempo.
2*H*dw
=T -T dt
e m
3.4 Tiempo de Arranque del Motor
(2)
El tiempo de arranque se calcula mediante el momento total de inercia GD2, referido al
eje del motor, y el valor medio temporal del par de aceleración Mb, es decir:
GD2
• 111 =----
ª 375·/vlb
Donde Mb se halla de la siguiente manera:
1500
1400
1300
1200
1100
1000
900
800
700
600
500
400
300
200
100
�
r--- lu...rr � � ....
-
Mh ... g '
L-----
_...._. 1 1 1 1 1
O 200400600800 1200 1600 2000 2400
n (1/min)
¡-........_"'
1500
1400
1300
1200
1100
1000
900
800
700
600
500
400
300
200
100
o
1'1 1/
¡_,---i---
1
3000
Fig 5: Valor Medio Temporal del Par de Aceleración Mb.
(3)

n
GD2:
Mb
Es la velocidad en. rpm
Es el momento total de inercia en Nm2
Es el valor medio temporal del par de aceleración del motor en Nm.
3.5 Corriente y Par de Arranque
15
Con vistas a la red se ha de procurar mantener reducida la corriente de arranque de los
motores de conexión directa. Por lo general, su intensidad se expresa como múltiplo de la
corriente nominal y permite así la comparación de motores de distinto tamaño. Una
corriente de arranque excesivamente pequeña repercute de forma desfavorable sobre los
valores técnicos de las máquinas, y especialmente sobre el par de arranque, el par
máximo, y especialmente sobre el par de arranque, el par máximo y el factor de potencia
nominal. La influencia sobre el rendimiento es, por el contrario, reducida.
El par de arranque sirve para acelerar el accionamiento en reposo y tiene que ser tan
grande que supere el par resistente o resistente del accionamiento y la fricción
despreciada de reposo. Pero por otra parte no se desea que produzca grandes
aceleraciones porque puede dañar el engranaje.
Una de las cosas importantes es saber la característica NEMA al cual pertenece el motor,
el cual nos dará el comportamiento de la corriente y el par en el arranque.
3.6 Tipos de Arranque
Los tipos de arranque que tenemos son:
• Arranque directa.
• Arranque estrella-triangulo.
• Arranque con Autotransformador.
• Arranque con Resistencia.
• Arranque con Dispositivo Electrónico.
Dentro del Arranque con dispositivo electrónico tenemos el arrancador electrónico y el
variador de velocidad.
3.6.1 Arranque Directo
Es la forma más sencilla de conectar los motores trifásicos con rotor de jaula. este
procedimiento es usual en casi todas las explotaciones industriales y debería ser utilizado
Siempre que las condiciones de la red lo permitiesen.
El método consiste en la conexión del motor directamente a la tensión nominal de la red.
En este arranque inicialmente se dan unos valores muy elevados, el par puede ser el
doble del nominal y la intensidad hasta diez veces superior a la intensidad nominal.

16
3.6.2 Arranque Estrella - Triangulo
Las medidas para limitar la corriente de arranque en un motor con rotor de jaula ya
acabado, en el que no puede realizarse ninguna modificación, consisten normalmente en
aplicar al motor durante el arranque una tensión reducida.
Este tipo de conexión consiste en arrancar el motor conectado en estrella y una vez
alcanza la velocidad de régimen se conecta en triángulo. La corriente de arranque
desciende en las acometidas a la red a menos de un tercio. El par de arranque se reduce
en igual proporción que la corriente de la red y, por tanto, es menor de un tercio del par
de arranque en conexión directa.
3.6.3 Arranque con Autotransformador
Con este método se reduce la tensión aplicada al motor por medio de un transformador de
arranque, la intensidad de parada se reduce en aquél en igual proporción, mientras que el
par de bache y la intensidad de red disminuyen de forma cuadrática.
3.6.4 Arranque con Resistencia
Se utiliza en los casos que se tuviese que reducir el par de arranque del motor con medios
elementales, con vistas a la máquina operadora, o al proceso técnico, se puede intercalar
una resistencia monofásica en una de las tres acometidas del motor, la cual se
cortocircuita una vez terminada el proceso de aceleración.
3.6.5 Arranque con Dispositivo Electrónico
Los arrancadores electrónicos son una mejor solución, gracias a la posibilidad de su
arranque suave, permitiendo un aumento en la vida útil de todas las partes involucradas.
Los mismos consisten básicamente en un convertidor estático alterna-continua-alterna ó
alterna-alterna, generalmente de tiristores, que permiten el arranque de motores de
corriente alterna con aplicación progresiva de tensión, con la consiguiente limitación de
corriente y par de arranque. En algunos modelos también se varía la frecuencia aplicada.
Al iniciar el arranque, los tiristores dejan pasar la corriente que alimenta el motor según
la programación realizada en el circuito de maniobra, que irá aumentando hasta alcanzar
los valores nominales de la tensión de servicio.
La posibilidad de arranque progresivo, también se puede utilizar para detener el motor,
de manera que vaya reduciendo la tensión hasta el momento de la detención. Estos
arrancadores ofrecen selección de parada suave, evitando por ejemplo, los dañinos golpes
de ariete en las cañerías durante la parada de las bombas; y detención por inyección de
corriente continúa para la parada más rápida de las masas en movimiento.

17
Además poseen protecciones por asimetría, contra sobretemperatura y sobrecarga, contra
falla de tiristores, vigilancia del tiempo de arranque con limitación de la corriente, control
de servicio con inversión de marcha, optimización del factor de potencia a carga parcial.
3. 7 Métodos de Solución
Para hacer simular el arranque de motor se tiene una serie de técnicas de solución, Estos
son:
• Métodos de Newton-Raphson
• Método de Desacoplado Rápido
• Método de Solución Híbrida
• Método de Gauss-Seidel.
Este último ofrece una mayor convergencia de las redes que tienen ramas con alta R/X.
Esta situación puede darse sobre todo en un sistema de alimentación con cables que
predominen en las instalaciones.
En el método desacoplado rápido los taps de los transformadores no serán ajustados y los
generadores se suponen capaz de ofrecer / absorción de potencia reactiva más allá de su
capacidad de potencia reactiva. Esta solución técnica es especialmente útil cuando se
desea determinar las necesidades de potencia reactiva en una instalación nueva.
El método de solución Híbrido es una solución muy potente adecuada cuando los
sistemas tienen diversas tensiónes. Este método utiliza tanto las técnicas de Newton
Raphson y Gauss-Seidel. La medida de potencia activa se resuelve mediante Newton
Raphson y de potencia reactiva se resuelve mediante Gauss-Seidel.
CAPITULO IV
CONFIGURACION DEL SISTEMA ELECTRICO
4.1 Descripción del Sistema Eléctrico.
En el presente informe analizaremos un motor de 4000 HP, el cual esta conectado a una
barra en 4.16 kV, el cual es alimentado por medio de un Transformador de 8 MV A,
11/4.16 kV, el que a su vez esta conectado a una barra en 11 kV. La Barra en 11 kV
alimenta diferentes cargas de la instalación industrial. La fuente de energía de la Industria
se toma en 50 kV. A continuación se listan los equipos principales relacionados con el
sistema, estos son:
• 2 TRANSFORMADORES 25 MV A, 50/11 kV
• 1 TRANSFORMADOR 2.5 MV A, 11/0.48 kV
• 1 TRANSFORMADOR 8-MVA, 11/4.16 kV
• SWITCHGEAR DE 11 kV
• SWITCHGEAR DE 4.16 kV
• SOFSTARTER 4.16 kV
• MCC 0.48 kV
4.2 Parámetros Eléctricos
4.2.1 Parámetros del Motor 4000 HP
Los parametros del motor en analisis son:
• Potencia 3588.216 KVA
• Voltaje 4.160KV
• Factor de Potencia 87.00 %
• Eficiencia 96.10 %
• Velocidad Sincrona 1800RPM
• Velocidad de eje 1780 RPM
• Momento de Inercia 72.50 kg-m sq
• Constante de Inercia 0.35 sec.
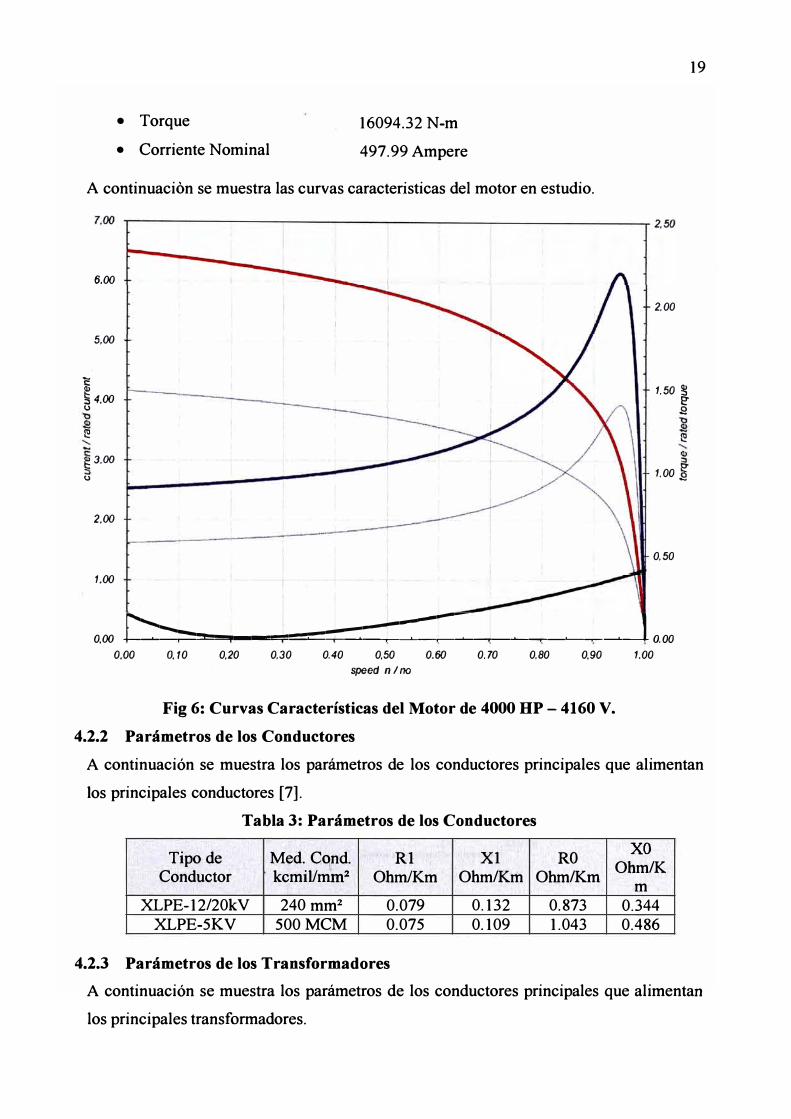
• Torque
• Corriente Nominal
16094.32 N-m
497.99 Ampere
A continuación se muestra las curvas características del motor en estudio.
6.00
5,00
t:
� ::, 4,00 (,)
e
�3,00 (,)
2,00
1,00
2,00
1. 50 �e-�
e
1.00 t
0,50
0,00 r::::���!!!l!!!f--����::::::====---r-....___----.-_.__�___.__J º· 000,00 O, 10 0,20 0,30 0.40 0,50 0,60 0.70 0,80 0,90 1.00
speed nlno
Fig 6: Curvas Características del Motor de 4000 HP- 4160 V.
4.2.2 Parámetros de los Conductores
19
A continuación se muestra los parámetros de los conductores principales que alimentan
los principales conductores [7].
Tabla 3: Parámetros de los Conductores
Tipo de Med. Co�nd. Rl
Conductor · kcmil/mm2 Ohm/Km .,
XLPE-12/20kV 240 mm2 0.079 XLPE-5KV 500 MCM 0.075
4.2.3 Parámetros de los Transformadores
Xl RO Ohm/Km Ohm/Km
0.132 0.873 0.109 1.043
xo
Ohm/K m
0.344 0.486
A continuación se muestra los parámetros de los conductores principales que alimentan
los principales transformadores.
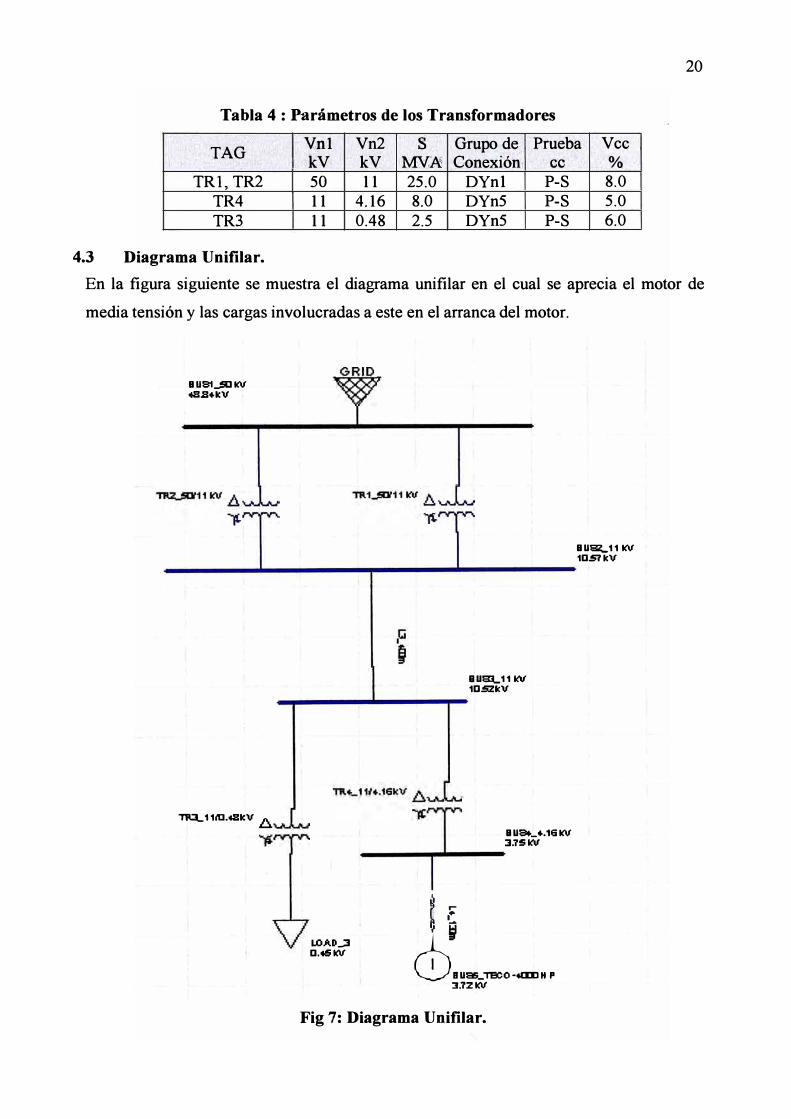
Tabla 4 : Parámetros de los Transformadores
TAG
TRI, TR2 TR4
TR3
4.3 Diagrama Unifilar.
··· Vril1,. '
:kV50
11 11
Vn2 kV 11
4.16 0.48
s
MVA 25.0 8.0
2.5
Grupo de -'· .•'
·Conexión, ·.DYnl DYn5 DYn5
Prueba \·
ce
P-SP-SP-S
20
Vcc
%. 8.0 5.0 6.0
En la figura siguiente se muestra el diagrama unifilar en el cual se aprecia el motor de
media tensión y las cargas involucradas a este en el arranca del motor.
BUS1J;DW 48.B+ICV
11Q..11/D.4SICV f::..
LOAD..;J D.461CV
\
� ,:
aum__11w 1D5ZICV
BU81-_+.16W 3.?51CV
� �
01Ua5_TBOO ·,DEN P 3.?21CV
Fig 7: Diagrama Unifilar.
BU�11W 1D.571CV
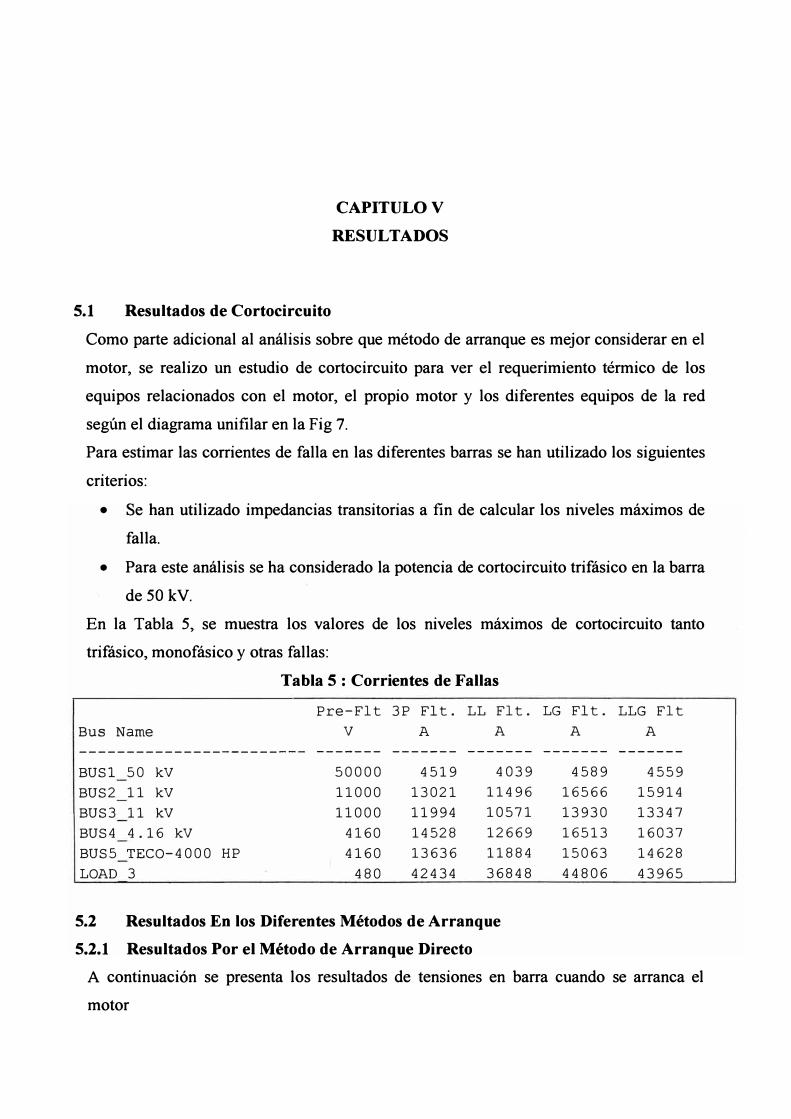
5.1 Resultados de Cortocircuito
CAPITULO V
RESULTADOS
Como parte adicional al análisis sobre que método de arranque es mejor considerar en el
motor, se realizo un estudio de cortocircuito para ver el requerimiento térmico de los
equipos relacionados con el motor, el propio motor y los diferentes equipos de la red
según el diagrama unifilar en la Fig 7.
Para estimar las corrientes de falla en las diferentes barras se han utilizado los siguientes
criterios:
• Se han utilizado impedancias transitorias a fin de calcular los niveles máximos de
falla.
• Para este análisis se ha considerado la potencia de cortocircuito trifásico en la barra
de 50 kV.
En la Tabla 5, se muestra los valores de los niveles máximos de cortocircuito tanto
trifásico, monofásico y otras fallas:
Tabla 5 : Corrientes de Fallas
Pre-Flt 3P Flt. LL Flt.
Bus Name V A A
------------------------ ------- ------- -------
BUSl 50 kV 50000 4519 4039
BUS2 11 kV 11000 13021 11496
BUS3 11 kV 11000 11994 10571
BUS4 4.16 kV 4160 14528 12669
BUS5 TECO-4000 HP 4160 13636 11884
LOAD 3 480 42434 36848
5.2 Resultados En los Diferentes Métodos de Arranque
5.2.1 Resultados Por el Método de Arranque Directo
LG Flt. LLG Flt
A A
------- -------
4589 4559
16566 15914
13930 13347
16513 16037
15063 14628
44806 43965
A continuación se presenta los resultados de tensiones en barra cuando se arranca el
motor

22
Conectado directo a la RED, de igual manera se muestra un grafico del comportamiento
del motor.
Tabla 5: Tensiones en barras en Arranque Directo
System V (PU) V (PU) VDip V (PU)
Bus Name Type Volts Before During % After ------------------------ ------ ------- -------- -------- ----- --------
BUSl 50 kV Swing 50000 l. 0000 0.9518 4.82 1.0000
BUS2 11 kV None 11000 0.9983 O. 9213 7.71 0.9954
BUS3 11 kV None 11000 0.9973 0.9127 8.48 0.9927
BUS4 4.16 kV None 4160 0.9973 0.8012 19.66 0.9817
BUS5 TECO-4000 HP z Load 4160 0.9973 0.7839 21. 40 0.9774
LOAD 3 P Load 480 O. 9720 0.8847 8.98 0.9673
En la tabla podemos observar que existen tensiones mayores a las permitidas (15%)
según el ítem 1.4.
o 5 10 15 20 25 30
--Speed in RPM
--Slip in%
Motor Torque in N-m
-- Load Torque in N-m
-- Voltage in KV
-- Current in Amps
-- Power Factor in%
-- Active power in KW
-- Reactive power in KVAR
Apparent power in KVA
Fig 8: Curvas Características del Motor Durante el Arranque Directo.
5.2.2 Resultados Por el Método de Estrella - Triangulo
A continuación se presenta los resultados de tensiones en barra cuando se arranca el
motor
Por medio de estrella - triangulo, de igual manera se muestra un grafico del
comportamiento del motor.

23
Tabla 6 : Tensiones en Barras en Arranque Estrella - Triangulo
System V (PU) V (PU) VDip V (PU)
Bus Name Type Volts Before During % After ------------------------ ------ ------- -------- -------- --------
BUSl 50 kV Swing 50000 1.0000 O. 9813 1.87 1.0000 -BUS2 11 kV None 11000 0.9983 0.9683 3.00 0.9954
BUS3 11 kV None 11000 0.9973 0.9643 3.30 0.9927 -BUS4 4.16 kV None 4160 0.9973 0.9209 7.66 0.9817
BUS5 TECO-4000 HP z Load 4160 0.9973 0.9142 8.33 0.9774
LOAD 3 P Load 480 0.9720 0.9381 3.49 0.9673
En la tabla podemos observar que las tensiones son menores a las permitidas ( 15%)
según el item 1. 4.
-Speed in RPM
35000 -+---,-� -Slip in%
�OOQ-1-----=-o_����������� - Motor Torque in N-m
-Load Torque in N-m
-Voltage in KV
-Current in Amps
-Power Factor in %
-Acti\e power in KW
-Reacti\e power in KVAR
Apparent power in KVA
Fig 9: Curvas Características del Motor Durante el Arranque Estrella - Triangulo.
5.2.3 Resultados Por el Método de Autotransformador a 65%
A continuación se presenta los resultados de tensiones en barra cuando se arranca el
motor
Por medio de un autrotansformador, de igual manera se muestra un grafico del
comportamiento del motor.

24
Tabla 7 : Tensiones en Barras en Autotransformador al 65%
System V (PU) V (PU) VDip V (PU)
Bus Name Type Volts Befare During % After ------------------------ ------ ------- -------- -------- --------
BUSl 50 kV Swing 50000 1.0000 0.9767 2.33 1.0000
BUS2 11 kV None 11000 0.9983 O. 9611 3.72 0.9954 -
BUS3 11 kv None 11000 0.9973 0.9564 4.10 0.9927
BUS4 4.16 kV None 4160 0.9973 0.9025 9.50 0.9817 -
BUS5 TECO-4000 HP z Load 4160 0.9973 0.8941 10.34 0.9774
LOAD 3 p Load 480 0.9720 0.9299 4.33 0.9673
En la tabla podemos observar que las tensiones son menores a las permitidas (15%)
según el item 1.4
5000
0 E���2Ei;;;;J1?2ir�E��:!f� o 10 20 30 40 50 60
-Speed in RPM
-Slip in%
Motor Torque in N-m
-Load Torque in N-m
-Voltage in KV
-Current in Amps
-Power Factor in %
-Actiw power in KW
-Reactiw power in KVAR
Apparent power in KVA
Fig 10: Curvas Características del Motor Durante el Arranque en
Autotransformador al 65%.
5.2.4 Limite Térmico del Motor.
A Continuación se muestra diferentes curvas que consideran el análisis de la variación de
la corriente en el tiempo versus el limite térmico del motor. En el limite térmico se esta
considerando los métodos de arranque anteriores, y adicionalmente se considera el
arrancador electrónico.
25
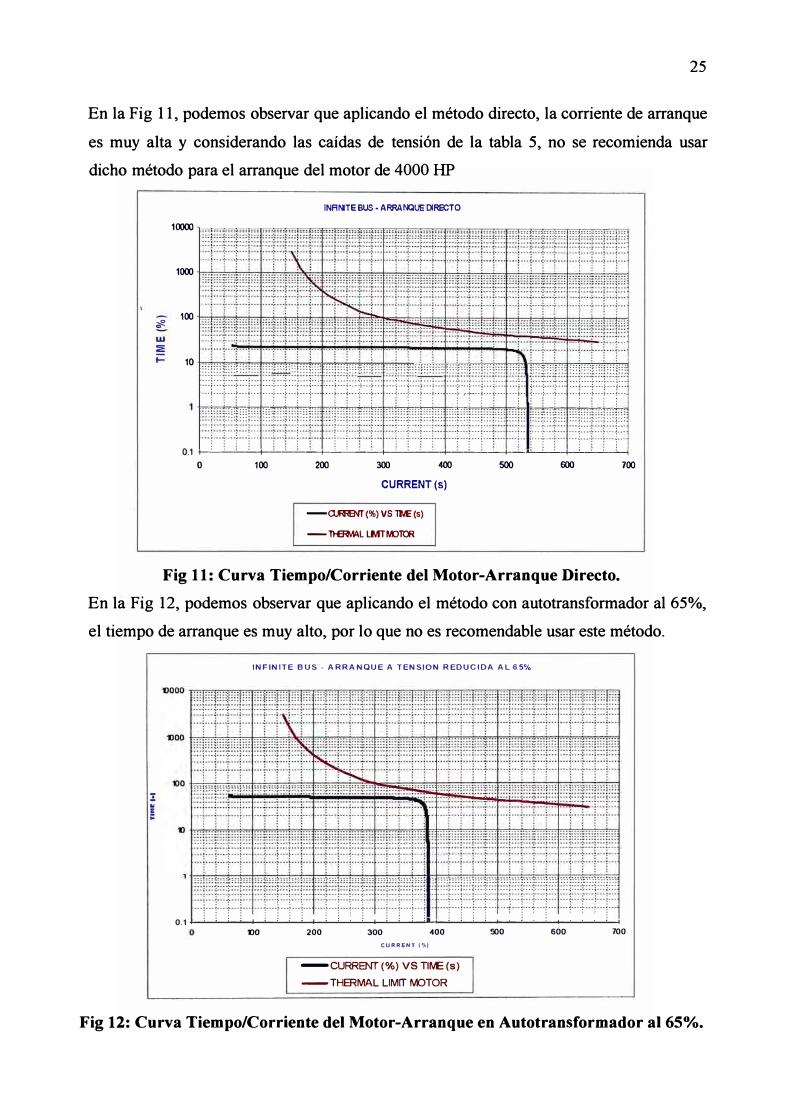
En la Fig 11, podemos observar que aplicando el método directo, la corriente de arranque
es muy alta y considerando las caídas de tensión de la tabla 5, no se recomienda usar
dicho método para el arranque del motor de 4000 HP
INAIIITE BUS· ARRAJ\QUE D1�O
10000
1000
;,R. 0
100
10 ; ; ; : ; ; ; ;; ; ; ;�;;;;;;; ; ; ; ;�;; ;�; J;;; ;; ; ; ; ; ; ; ; ; ; ; ; ; ; ; �;; ;�;;; ; ; ; ;; ; ; ;; ; ; ;�;;;;;;; ; ; ; ;�;; ;�;;;;;;;;;;;; ; ; ; �; ;;; ; �;; ;�;;; ; ; ; ; ; ; ; ;�;; ;�;;;;;;;... ; ... .: .... :.
... : ... .... :. ... :,. .
.. : . --�--. .... : ... : ... .: .... :. ... ... : ..
.......
: ... : ... .... :. ... :. ... ; ... : .... ... ;
.. : ... .: ... � ... ... : .... ;.. -
--�-.. ; .. . • • • ; ••• .; ••• -: -••• ; •• - •• -.¡. ••• ¡. ••• � ••• '\·
.. • ••• ; ••• ; • - -- : --.• ;. • • • • •• ; ••• '\· •• -:. ••• ; • • • • ••• ;. •• -:. ••• ; .•• ;. • • • • •• ; • • .; ••• -:-••• ;. • • • • •• ;-•.• ;. ---; • -• ; ••• . .. ¡ .... ; .... j. ••• j
..• .
-.. ; .•. j. ••• j ---�--- ••• ¡ .. -i---.:
.... j. ••• ••
-�--· .; ..•• ; ••. j •.• .••• : •••• }---i
---�-...
-.. f .. � .••. ; ••.
-�···
.•. i----�-.. ¡ ... � ...
'i ¡:::;:::/ '::t::::¡,:::::,, i+:i:::¡:: :::tt:H::: :::i:i"'i1':': :::i ¡:<:::: :::ti'"i'j::: 0.1 +---'--'--'-+--'---'---'---'--+--'---'---'---'---l--'---'---'--'--+--'--'---'----'---+---'--..a;_...:...--'---+-...:......:......:......:..--1
O 100 200 300 400 500 600 700
CURRENT(s)
-a.,me,.rr (%) VS 1M: (s)
-nt:R\1AL LMT�lt:fi
Fig 11: Curva Tiempo/Corriente del Motor-Arranque Directo.
En la Fig 12, podemos observar que aplicando el método con autotransformador al 65%,
el tiempo de arranque es muy alto, por lo que no es recomendable usar este método.
INFINITE BUS - ARRANQUE A TENSION REDUCIDA AL65%
. . . . . .. ..
. . .... ... ... .. .............. .. .
. . . .
.
. ... .... ....... .... . .
. . . . ... .. ... . . .
.. : :: : :;:::::: ::::: :::: : :: :::: :: : :: : :::: ::::::: ::: :: : ::;: :::: ::: : : : :
� � : � � � ; � � � � � � : : � .
·---�·-·'.···:····:···· ···:··-�----�---
-�·-· ···�---
-�---�--- �---
---¡---¡---¡ ···¡··· ···¡----¡---¡-·-¡--- ····¡---¡---:---¡··· ---¡---¡----¡-··j . ----:---:---:---:··· ---'---¡---;---¡··· ---;---;---:---¡··· 0.1 -l--'--'--'--'--l--'--'--'--'--l--'--'--'--'--l--'--'-� ....... -1-����-1-����-1-����-,
�o 200 300 400 500 600 700
CURRENT l'.41
-CURRENT (%) VS Tll'vE(s) -THERMAL LIMff MOTOR
Fig 12: Curva Tiempo/Corriente del Motor-Arranque en Autotransformador al 65%.
26
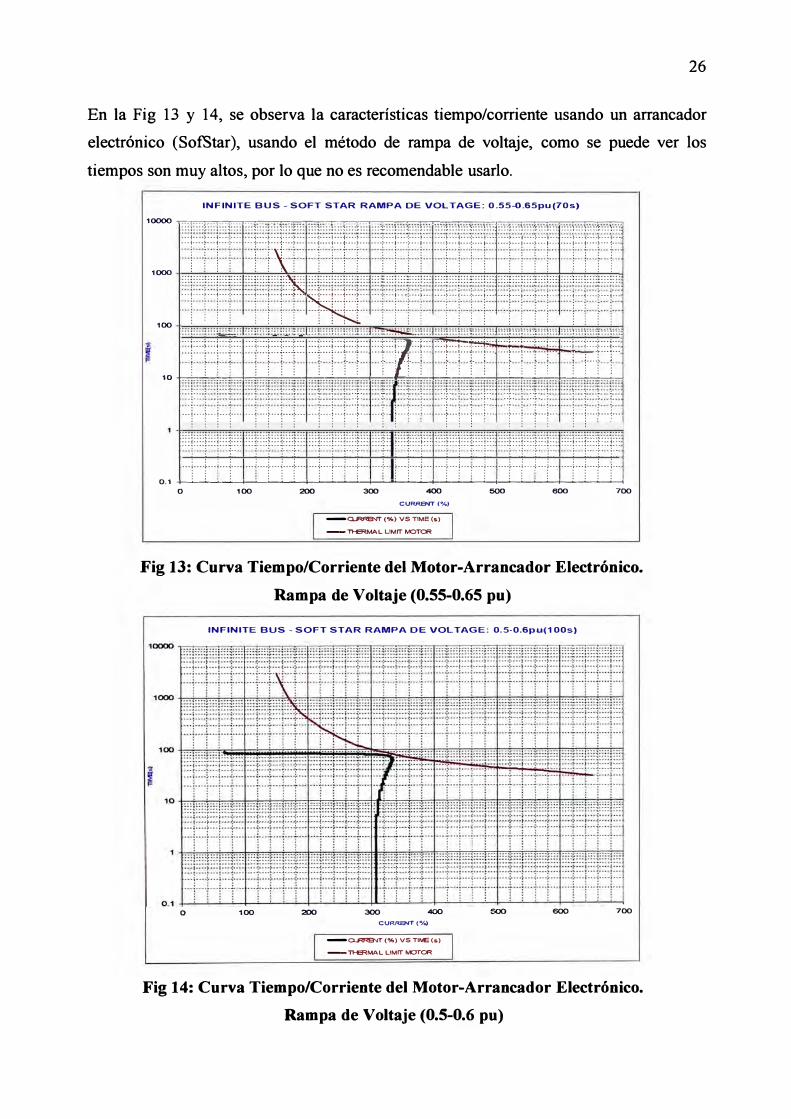
En la Fig 13 y 14, se observa la características tiempo/corriente usando un arrancador electrónico (SofStar), usando el método de rampa de voltaje, como se puede ver los tiempos son muy altos, por lo que no es recomendable usarlo.
INFINITE BUS - SOFT STAR RAMPA DE VOL TAGE: 0.55-0.65pu(70s)
10000 =��======================--=�7============
: : : ! : : : :�::: ! : : : ::: : : : : : : �::: :�::: �::: :!: : : : : : : �:: ::: :: : :: : : ::: : : : : : : :::: : : : : : : : ::: : : :: : : : : : : ::: : : : : : : : ::: : : : : : : : : : : =�::::::: ::: : : : : : : : : : : : : : : : :: : : ::: : : : :: : : • • • t • • • -� • • • l • • • -:· • • • • • · '\· • • ·1-• • • '\· • • -� • • • • • • �-• • • 1 • • • i· · · -:- · · · · · · -:- · · · 1 • • - -:--• • t • • • • • • ·t · · · t • • • -:- • • • t • • • • • • ·1-• • • 1 • • • -:-• • • I • • • • • • • t • • • i· · • ·1- -• • i· · • ···¡····r···1····1···· ···1····r·t··r··· ···r···¡···1····r··· ····¡···· ¡····¡····¡··· ····r···1····r··· ¡··· ····r···1····r···¡··· ····¡···1····r···1··· ::::::::::::::::::::: ::::::::::::::mg::::::::::::::::::::::::::::::::::::::::: :::::::::::::::::::::::::::::::::::::::::: ::::::::::::::::::::: ···1····t···1····i···· ···1····t···1····r··.�-·· ····i····t····i····t·······t···1····r···t··· ····t···t····r···¡··· ····t···1····¡···1···
1000
100 ::::::::::::·······:: :::·:·::··:··::·:·::· ·::::::::::::::::::::: ::::::�···:::: ::::::::::::::::::::: ::::::::::::::::::::: ::::::::::::::::::::: =::f':f :::f l:: :::(::¡:::;::+:: :::\::::¡:::;:::t:: ::::(::¡1,:::(: :::=¡:::;:::;::::'::= ==:::===:::+==e ==:=::==t:ff: ···¡····¡···r··;···· ···r···¡···r···¡··· ···r···¡···r···¡··· -··1···ii:···¡··- -·-·¡···¡···r···¡··· ····¡···¡··-·¡···¡··· ····¡··r"f ···;··· 10 +------t------+-------1--.----+-----=-===--=-===-<
.. .¡.. .. � ... ¡ ... ; .... -··1····�···1·-··�··- ... ; .... ¡ ... ¡··+·· .... �. ¡---; .... l ... ··+··j···j···_¡__· ··+··!··+·-i··· .... ¡ ... ; .... l ... ; ....·-··-····· ............ ...................... ...................... ...... . .. . . . . .. � ............. ... � ......... � ......... ... �.... ........ .... . . . . .... . . ........ ·•··· ...................... ...................... ................. ·•··· ===1====r===1===r== =::1====r===r=r== =::1====¡===r=r== ==:r= ¡===r==r=== =:==:===¡===:===:=== ====r===r=:r=:r== ====r===r=:r==:= == ... ; .... ;. ... ¡ ... .; .... ... ; .... ;. ... .¡ •••• ;. ••• ••• ; •••• ¡. ••• ; •••• ;. ••• •••• ; •• ; ••• .; •••• ;. ••• •••• ;. ••• ; ••• .; •••• ¡. ••• •••• ;. ••• ¡ .... ¡.. ••• ; .•• •••• ¡. ••• .; •••• ¡.. ••• ; ••.
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ . ¡ . ¡ j ¡ ¡ ¡ : ¡ ¡ j ' ¡ ¡ ¡ ¡ ¡ 0.1 +--�-----1-�---+--�-----1-�----+-------1------+--------.
o 100 200 300 400
CURRB"fl" (°/4,)
-� (%) VS TIME (s)
--TI--ERMAL LIMrT �TOR
500 600 700
Fig 13: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Voltaje (0.55-0.65 pu)
INFINITE BUS - SOFT STAR RAMPA DE VOL TAGE: 0.5-0.6pu(100s)
o 100 200 300 400 500 600 700
CURRENT(%)
-o.....RR:e,(r (%) vs Tlf'wE(li)
--11-ERMAL LtMrr MOTOR
Fig 14: Curva Tiempo/Corriente del Motor-Arrancador Electrónico. Rampa de Voltaje (0.5-0.6 pu)

27
En la Fig 15 y 16 se observa el método por medio de rampa de corriente en arrancador electrónico. Ambos no son recomendables, esto porque en la Fig 15 se observa una corriente alta (400%) en el inicio y en la Fig 16 el tiempo de arranque es muy alto.
INFINITE BUS -SOFT STAR RAMPA DE CORRIENTE: 4-6pu(30s)
10000 -r., •• �.,'-•• � •• r.,.� .. T.,.� .. �.,� .. �.� .. � .. r..� •. T.,.� .. �.,� .. � ... � .• � .• r..� •• T.,.� .. �.,� .. �. ,'-•. � .. r.,.� .. �.� .. �.,� .. �.,'-··�··r.,.� .. T.,.� .. �.� .. �.,'-.. � .. r.,.� .. ,.,.� .. c.,,� .. �.'-··�··r.,.� •. T.,.� •• �.,� .• �.,'-.. � .. r..� .. T.,.'-••�·, �··�·,�··'-··r.,.,c, .. . . . �-... � ... �-.. -�... .
... : ... � .... : ... �-.. . . .. : ....•... �-... , . . . . ...•... �-... � ... �-... . .. �- ... � -.. �-... �... . . . .. . . . . . . . .. . . . ... . . . .. �-...•........•...
1000
···1····r···t···r··· ····¡···1··*·1···· ···¡-···¡···¡····¡···· ····¡···1····¡···1···· ····r···r···¡····r··· ····r···¡····r···¡···· ···1····¡···1····¡···
100
::::::::::::::::::::: :::::::::::::::::::::: ::::::::::::::::::::: :::::::::::::::::::::: : :: :: · .. �: ·: :·.: · � .. - ... ·: · .. :· ... : · .. :·... . . · :· ... � ... :· .. -�... .
... : .. · :· .. ·: ·. ·:·... . . :· ... : .. · :· ... : .. - ... ·: -
. · :· -
. ·:. -
. :·... : : · :· -
. -� ... �-.. ·: · -.
... ..¡ .... • ... • .... • ••• •••• • ••• • •••• • ••• • .... ... • •••• ¡ ... •._ .. • ... .... • ... • .... • ... • .... .. · .... • ... • .... • ... .... · ... · .... ' ... · .... ... .; .... · ... · .... • ...
: ¡ ¡ ¡ ¡ : : ; ¡ ¡ ; ¡ ¡ ; ; ¡ ¡ ¡ ¡ ¡ : ; ¡ ¡ ¡ ¡ ¡ ¡ 0.1 +--'---'--'--'---,f--'---'---'---'--+-'--'--'-'--+--'---'---'--'--4--'-'--'---'--+-------,e------; o 100 200 300 400 500 800 700
CURRBIT('lo)
-OJRRENT (%) VS TIME (s)
--TI-ERMAL LIMIT MOTOR
Fig 15: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Corriente (4-6 pu)
INFINITE BUS - SOFT STAR RAMPA DE CORRIENTE: 3.5-4pu(60s)
10000 ======================================
1000 +-,-,!,,,+��c-c±='c"""'=±�t=-�-cicc:-2,+.�c-:ic=i'=i'�='777i7:7:::-::-,;--,.,,t--c===="'*====�
100 -b±+.,,;.,.,,;.,.,.+.,.,.,;.,.,.,;=;.-,.,,;-,,.,-t=+.-c,�+.�'!1-..i;;�=i'=i'""1:,.,.,.,'777�ci=-tt�::t-:T:::T:'::t333::::d
f
.. i ¡ i! i} fii]Ifi 1 :¡¡¡¡ i i !!f :¡::¡:¡ i : EFFF '1¡:::¡I'!"i"::::;:::;::::;:::;::: ::::::::;:::r:;::: :::;::::;:::;:::;::: :::;:::;: 1,.\: ... '.'.'. '.j,. j,.j,.:::::,.'.::: :::;,·.:::I,. :j,.:::J,:::: :j,.:j,::::[,:::J,:::. : : : : : : : : : : . : : . : . r O. 1 +--'---'---'--'---+-'----'-'--'--+---'--'----'--'---+---'--'-.L..:.-'---l--''--'---'---'--+--'------+-------1
100 200 300 500 600 700
CURRENT ("'/.,J
-OJRR9'1T ('Mi) VS TIME(•)
--THER:MAL LIMrT MOTOR
Fig 16: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Corriente (3.6-4 pu)

28
En la Fig 17, 18, 19 y 20 se observa el método por medio de rampa de torque en
arrancador electrónico. En la Fig 17 y 18 los tiempos son muy largos por lo que no es
recomendable, en cambio en la Fig 18 y 19 los tiempos son cortos y las corrientes de
inicio en el arranque son menores a las demás vistas anteriormente.
INFINITE BUS -SOFT STAR RAMPA DE TORQUE: 0.35-0.8pu(100s)
10000============-=================-c=====-=====-= ···:··¡·· : .. ¡ ...... :· ··: x· :··· ···¡···: .. :···:·· ... : ... ¡··· r·· ·¡ ... .. ··:···¡· ·: :··· ·· :·· :··· ¡ ···¡··· .. ·¡· ··:· .. ¡ .. ·:···�¡¡:: :r:T� ¡¡¡¡ ¡;¡¡ :::¡ ;:::
1000
100
1111 !!ll lm]�f ¡¡¡¡ :11: ¡¡�¡¡ 10t====-c:±=-====t,-,-,-=====-:-:t:-=c-c;--c-l==:c�===============-=
.. -�-··-�·-·-:-· ··:-· .. . -·:. -. ¡ ... �-. ··:-·· . ... ·:-· .. �-.. ·:--. -�-... ... �-....
.. ¡ --· :- .. ----�--. ·:-··.: ... ·:-·· . . ···:-· .. :····: ... �--.. ···-:··. · : ... -:· ... :· .. ··-i--··¡···r--r-··· ···¡····¡···-i----r-·· ····:-··-r--¡-·-r·· --·i-- :¡···rr· ···rT·r--r-·· ··--r-·-i----r-··1··-- ·:·1:·--:-···r··-i--·1... , .... , ... .., .... r .. ·. ·--•--·;;·--,·--·.---- ···-:····,--··r·--,--·· ... , _ .. , .... , .... , ... ......... ,. ........ ,. ... .... ,. ........ , ... , .... ......... , ......... , .. .
O •• �-•• -· •• 04 .. : •• --•• O O O! O o·--· OO ••• 0 -�-O O ••• -·· •••• O ••• O OO •• O O O O .... ....... ·-··· •••• •••••• ·--�--O ••• ··-•• O O •• ·-•••••• O •• O O·-··· O ...... O •• O O O -· O OO ••••
·--:----:--->··-'.···· ·--:---:---:----:--- ·--:----:----:---:---· ...... : ... :.--:--- ·---:----:---:----:--- ···<···>··-'.···>··· ·--:----:---:----: .. . . .• {· .. ·t •.. -:-.. ·•· ... .•. ¡ ... -:-. ··-!···-�--- ····:····-:----�-.. -1· ••• •••• • ··• ••• ·!-· •• l ·•· ···· l···-�·-·l ··. ·} ... ····t···i···-� ... -!·· •• •• --:·-··t··· -:---. l···
o
� � � l � ¡ � l l : � � ; ¡ ¡ j : l � ¡ : ; � j ; � � 100 200 300 400 500 500
C�(''I..)
-a..RREJ't,,IT(%)VSTP.E(s)
-- �L LMT NIOTOR
700
Fig 17: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Torque (0.35-0.8 pu)
INFINITE BUS - SOFT STAR RAMPA DE TORQUE: 0.35-1.0pu(100s)
o 100 200 300 400 500 600
Cl.JRR!3'11T(%)
--� (%) vs 'D\IE <•>
-- Tt-ERV.AL LMTM::>"TOR
Fig 18: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Torque (0.35-1.0 pu)

29
INFINITE BUS - SOFT STAR RAMPA DE TORQUE: 0.35-2pu(30s)
o 100 200 300 400 500 600 700
CURRB\JT (%)
-cuRRENT ('16) VS TUVE (s)
--THERMAL LIIVIT t.lOTOR
Fig 19: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Torque (0.35-2 pu)
INFINITE BUS - SOFT STAR RAMPA DE TORQUE: 0.35-1.5pu(50s)
o 100 200 300 400 500 600 700
C URRB'IT (¾)
-o....RRENT (%) vs Tlft..E (8)
-- Tl-ERMA L LIMrT MOTOR
Fig 20: Curva Tiempo/Corriente del Motor-Arrancador Electrónico.
Rampa de Torque (0.35-1.5 pu)
Concluyendo con los gráficos anteriores podemos ver que la rampa de torque en un
arrancador electrónico es el método mas optimo para el motor en 4000 HP.

CAPITULO VI
RESULTADO DEL ANALISIS DE ARMONICOS
6.1 Herramienta Computacional
Para este análisis de armónicos se ha usado el software WinArm, con este programa
hemos podido obtener los THD de las barras involucradas correspondiente al motor de
4000 HP.
Se ha tenido en cuenta la data del SEIN, el cual se encuentra dentro del WinArm.
6.2 Resultados de Armónicos
En la figura 21 se muestra la curva de impedancia en función de la frecuencia en la barra
de 50 kV, se puede observar que hay presencia de armónicos hasta los 1000 Hz. En la
figura 22 se observa la onda sinusoidal en 50 kV.
4r
3S
3
.-.
i:: .e 25 o
"1 ·-1
20 u
e d
15 GI
t 10
5
o
----------,-----------T----------·r-·--------,-----------T·----------r·----------,
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
-----------1-----------+-----------�-----------1-----------+----- ----�-----------1
1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1
---------- :-----------:-----------: ---------- :-------- -:-----------: ----------: 1 1 1 I 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 f 1
-----------1-----------+-----------�-----------1 ---------+-----------�-----------1
1 1 1 1 1 1 1 1 1 1 l 1 1
1 1 1 1 1 1 1
---------- :-----------:-----------: --- ----- :-----------:-----------: -----------: 1 1 1 1 1 1 1
1 1 1 1 1 1
1 1 1 1 1 1 ---------?------ ---r----------�-----------?·----------r----------�
1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
---------� ----------L----------J-----------�-----------L-----------1
1 1 1 1 1 1 1 1 1 1
1 1 1 1 1
1 1 1 1 1 1 ----T-----------�----------�-----------T-----------r-----------1
1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
,... o ,;;, o
... (,/l ,;;, e,
._, o ,;;, e,
•J (,/l ,:, ,:,
1,., e, e, e,
,.,,, (JI ,:, o
Barra : TORRES_ 50 Frecuencia (Hz)
Anallsls de Arranque de Motor
Armonicos
- Ana_isis de J:.rrn-�nico3
Fig 21: Curva de Impedancia/Frecuencia - Barra 50 kV
4S•J(I..,
4C,OOO
35Qü1J
30(11),J
2500•)
ZOMO :,
lSOC1<) .,,
o l(H)l)I)
... 5000 ... :, ,) e, z -5000 1
�-1000•) t!-15,),J,) >-2( .. )0•J
-2.500•) -30()0-SSC11),}
-4C,00•) -4500.
o
------,- - --- -,- ---- - "l------ r----- -,-- - --- -,- - ----,---- -- ,---- -- - -- ---r------¡------, 1 1 __,-=-..__ 1 1 1 1 1 1 1 1
------r-----,-- --,- ---r------r------r-----,------,------ ------r------r------,
1 1 1 1 1 1 1 1 1 1 1 ------r----- -----,------ ------r------r-----,------,------ ------r------r------,
------: --- - :------:------:- ----: ------: -----!------ :------ ------: ------: ------: 1 1 1 1 1 1 1 1 1 1 1 ------r ---,------,------ r---- -r------r-----,------,------ ------r------r------,
----- :------1------r------, ------: ----- :------ :----.. - ------: ------: -----:
--- --: ----- :------:------:------: - ----: ----- :------:------ ------: ------: ------:- ----: ----- :------:------:------: --- --: ----- :------ :------ ------: ------: ----- :-----: ----- :------:------:------: ---- -: ----- :------:------ ------}-------: ------:
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
______ L _____ J ______ J ______ l------L------L ____ J ______ J ______ ! ______ L ______ L ____ _ 1 1 1 1 1 1 1 1 1 1 1 1 1
------L-----.J_ ----_.J __ --- -L- -----L----_ -L- ___ .J ____ ---'--___ -.L ______ L _____ _.L.__ __t 1 1 1 1 1 1 1 1 1 1 1 1
------L----_ J_ ----_J __ ----l------L----_ -L--_ _J ______ J ______ ! ______ L ______ L _ ____ I 1 1 1 1 1 1 1 1 1 1 1 1
______ L _____ J ______ J ______ l ______ L ______ L _____ ______ J ______ ! ______ L ______ ______ , 1 1 1 1 1 1 1 1 1 1 1
------1---------------4------1-------1-------1--------- ---�------+------&..---- �------1 1 1 1 1 1 1 1 1 1 1 1 1
------L-----.J------.l------L------L------L-____ .J ____ --'------.L------L- ----L------1 1 1 1 1 1 1 1 1 1 1 1 1
------L-----J------�------�------L------L-----J------ ______ ¿,. __ ,. __ .......... -&..-----� 1 1 1 1 1 1 l 1 1 1 1 1
------L-----.J-.......... J,.,.,.,._,.L ............ L .. -........ L .......... �-------'-- .... .L .. ...... L ............ L-----� 1 1 1 1 1 1 1 1 1 1 1
�·
o "' o
... ,, C'
... ..,. ,:,
-
"' o
"' o
f,; ...o
IJ .., o
w o o
<,; º'
C•
Barra: TORRE8_50 Anqulo (Grados)
I!!D's l) 3.292\
Analisis de Arranque de Motor
Armonicos
- Anal�s· s de Amc,ni.cos
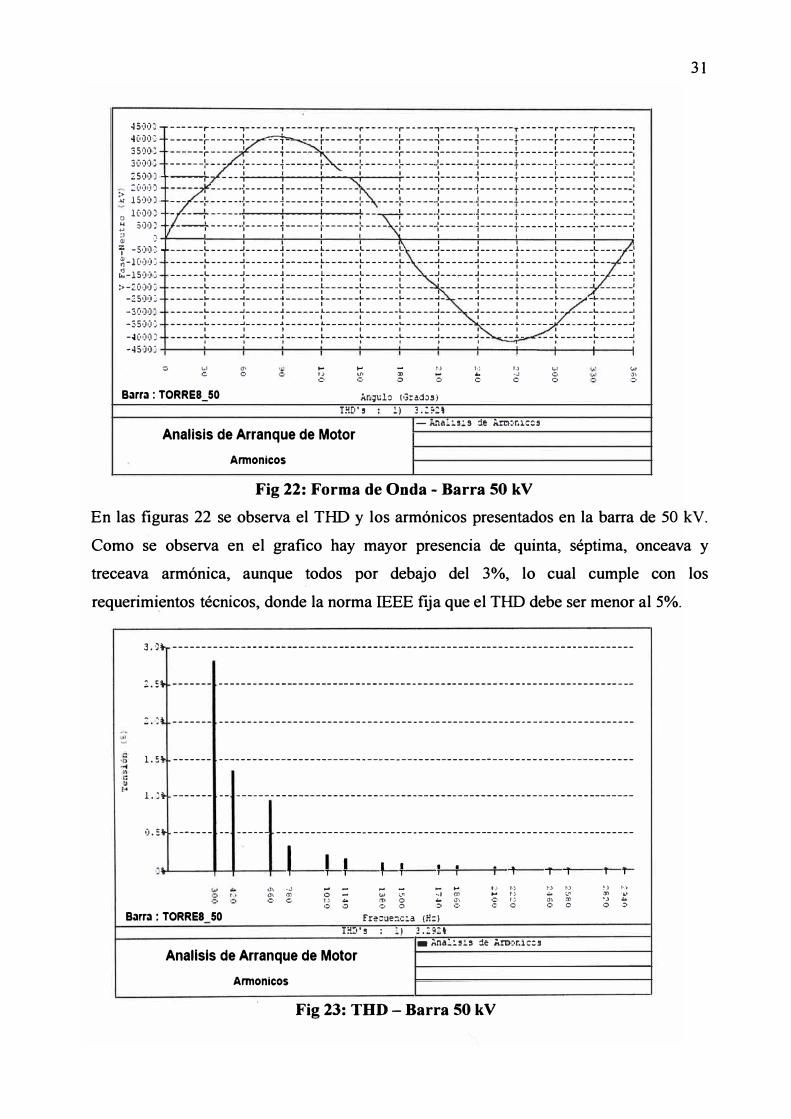
Fig 22: Forma de Onda - Barra 50 kV
31
En las figuras 22 se observa el THD y los armónicos presentados en la barra de 50 kV.
Como se observa en el grafico hay mayor presencia de quinta, séptima, onceava y
treceava armónica, aunque todos por debajo del 3%, lo cual cumple con los
requerimientos técnicos, donde la norma IEEE fija que el THD debe ser menor al 5%.
3.0i ---------------------------------------------------------------------------------
z.s, ------- -------------------------------------------------------------------------
:: . ·H ------- -------------------------------------------------------------------------
1.5% ------- -------------------------------------------------------------------------
l.)+ ------- -- ----------------------------------------------------------------------
O.Si- ------- -- ------ ---------------------------------------------------------------
Barra : TORRES 50
1 1
¡j\ ... ,
O\ O)
ó o
1 1
... o ,, o
1 1 1 .
1 1 1 1
;: ... - ..."' en .. ,
.. m o ...o e, o o
Fre::uencia (H:)
!HD's : l) 3.Z92\
. -7
... ,., l•l eo ... M
O\ o "o o o
• Analisis de .A.m.,:inico3
Anallsls de Arranque de Motor
Armonicos
Fig 23: THD - Barra 50 kV
' 7
1-:) "' ,.;o lfl D\ <J)
o o
1 1
�, t-,) ,, 'º " ... o o

32
En las figuras 24 se muestra la curva de impedancia en función de la frecuencia en la
barra de 11 kV, se puede observar que hay presencia de armónicos hasta los 700 Hz. En
la figura 25 se observa la onda sinusoidal en 11 kV.
? • j
a.s
3. ,)
::: . ,)
l. 5
l. j
ü.S
o
----------,-----------T-----------r----------,-----------T-----------r-----------11 1 1 1 1 1 ----------,-----------T-----------r----------,-----------T-------- -r-----------, 1 1 1 1 1 1 1 ----------,-----------r-----------r----------,-----------r·--- ------r-----------,
----------� --- --------f-----------: ----------i----------- I - - - - - - - - --� -- - -- - -- ---:
1 f 1 1 1 1 1 ----------,-----------T-----------r----------,-------- --T-----------r-----------,---------- :------·----:-----------r---------- :---- -----:-----------: -----------: ----------1-----------:-----------: ---------- 1 ----------:-----------t'-----------:---------- :-----------:-----------: ------- -- :-----------:-----------: -----------: ----------,-----------t-----------: --- ------1----- ------: -----------r-----------:
----------1---... -------t---------- . -.. --.. -----�----------.. : -_ .... -------r-.......... _ .. ---:__________ J ___________ i _______ ---L .. _________ J ___________ �-----------L ___________ 1
1 1 1 1 1 1 1 ____ .. _____ J ___________ i ___ __ .. ___ L ______ .. ___ J __________ .. i-----------L----.. ------1
1 1 1 1 1 1 1
__________ J ___________ ___________ L __________ J ___________ 1 ___________ L ___________ 1 1 1 1 1 1 1 l
__________ J _______ __ ¡ ___________ L __________ J ___________ ¡ ___________ L ___________ o 1 1 1 1 1 1 1
.... ----.. ---�-.. -- -----+-------.. ---�--.. -------�-----.. -----+-----------�--.. --------! 1 1 1 1 1 1 1
--------i-----------L----------J ___________ i ___________ L-----------1 1 1 1 1 1 1 1
----�-----------Á-----------L----------�-----------•-----------L-----------1
1 1 1 1 1 1 1 _______ j _______ • ___ i---··-·----L----------J·----·-----�-----------L-·-·-·-----1
1 1 1 1 1 1 1
V, .... .... "' , .. , w c.,, ,::, o <JI o '-" o
o o ,:, o o C• ,::, o C• o o C•
Barra : TORRES _11 Frecuenc:.a (/!:::)
;, .,:
o "
µ
::, 41 ;¡: 1 "' ,,
"'
�. :>
- AnaliSlS de l.rmoniccs
Anallsis de Arranque de Motor
Armonicos
Fig 24: Curva de Impedancia/Frecuencia - Barra Bus2 11 kV
300
200 100>)
-2000-3•)00
-4000)
-S1J01)
-6(¡o),)-700"-6,),)') -91),j,)
-1(11)0>)
o
-----·r·----,--··-·,------r------r-·--·-r·-·--,·--·--,·-··--y------r------r------,
------�
-----j -----�----- t------�
------�-----�
------�
------t
------�
------�------i
-----·�--- �--··--�------� ----�------�-----�--··--�···--·+-----·�··-·--�-·--··I 1 1 1 1 1 1 1 1 1 1 1 1 ------�-- --�------1------�--- --�·-----�-----�-··---�-·-·--?--·-·-t---·--�-.. ---4
·-----· ---- :------ :----·-: ·---- 1 ------: ---·- :·-·--- :------:------:------: ------:
1 -----�------1------t------f -----�-----�------�------+------�------�-----�
--- -·�--.. --�------�--·-··�------�- ----�·-···�------�------•------�·----·�-·----1 1 1 1 1 1 1 1 1 1 1 1 1
- ----�·----�---·--�-.. ·-·-�------�--- --�-----�-··---� .. -----+-.. ·---�------�-----·! 1 1 1 1 1 1 1 1 1 1 1 1 -----r-----,------�------r------r---- -r--··-,-·----,------T·-----r------r------1 J t 1 1 1 1 1 1 1 1 1 t 1 1 1 1 1 1 1 1 1
-----.L .......... J ............ �--·-··�------L---··-� -·--J----·-J------i-....... L ..... -... L---- .. 1 1 1 1 1 1 1 I 1 1 1 1 1
------�-----�---·--�·-----�·-----�------�- ---�------�------+------�-·-·--�·-· ·-1 1 1 1 1 1 1 1 1 1 1 1 1
------�-----�--··--�------�·-----}---··-�---- 7···--·�·--·--f------}-----1 ___ -_¡ ______ L _____ J---·--�-----·�------L------L-----J .. __ .J .. _____ i-·----L----- ------1
1 1 1 1 1 1 1 1 1 1 1 1 -···--L-----J------�------�···---L ........ L---·-J ... __ J _____ .. i ....... L ........ L ....... I
1 1 1 1 1 1 1 1 1 1 1 1
======�=====�======�======;======�======�=====�======�:=====r=====:�==:===�=====� w o
"' o
... O> o
... <JI e,
,.. (1) o
IJ ,.. o
IJ ... o
w o e
w w o
,.., o-, o
Barra: TORRE8_11 Angulo (Grados)
IHD's l) 2.805\
Analisis de Arranque de Motor
Armonlcos
- A."lalisis de l.rrn,,n1co3
Fig 25: Forma de Onda - Barra Bus2 11 kV

33
En las figuras 26 se observa el THD y los armónicos se presentados en la barra de 11 kV.
Como se observa en el grafico hay mayor presencia de quinta, séptima, onceava y
treceava armónica, aunque todos por debajo del 3%, lo cual cumple con los
requerimientos técnicos, donde la norma IEEE fija que el THD debe ser menor al 5%.
2.:, ---------------------------------------------------------------------------------
2.�, ------- -------------------------------------------------------------------------
·" 1. :, ------- --------------------- -------------------------------------- - -------------
.¡¡ ... " � l.)�------- -- ----------------------------------------------------------------------
ú.s, ------- -- ----- ---------------------------------------------------------------
w ...
O N
O C•
"' "' o
1 ....,o
1 1
.... -
o :;: 10
o o
1 1 1
;:;; ; -1"' o ... o o o
. 1 '
.... " 10 "' N !•) "' O:• ... ,. ... V, "'
� "' o 10 e, a, ,, o o o o o o o
Barra: TORRE8_11 Frecuencia (H:)
TF.D's
Anallsls de Arranque de Motor
Arrnonicos
: l) •. ,:úSl
Fig 26: THD - Barra Bus2 11 kV
En las figuras 27 se muestra la curva de impedancia en función de la frecuencia en la
barra de 11 kV en la entrada del transformador 11/4.16 kV, se observa que hay muy poca
presencia de armónicos. En la figura 28 se observa la onda sinusoidal en la misma barra.
F. .e 2
d ... u e d .,,
!
16 ----------,-----------y-----------r----------,-----------T·----------r-----------, 17 ----------i-----------t-----------�----------i-----------t--------- r·----------: lé ----------i-----------t-----------�----------1-----------t----- -----�-----------: 1: ---------- :-----------:-----------: ---------- :----------- • - ---------�-----------: 1� ----------i-----------¾-----------�----------i-------- -r-----------t-----------: 13 ---------- :-----------:-----------: ---------- :----- -----:-----------: -----------: 1� ----------�-----------f-----------t----------1 ---------+-----------�-----------: 1- ---------- :-----------:-----------t------- -:-----------: -----------: -----------: 1J ----------1-----------t-----------r--- -----7-----------t-----------r-----------: 3 ----------�-----------i------- --�----------�-----------t-----------�-----------i 7 ----------�-----------t--- ------�----------�-----------t-----------�-----------:
o
----------�------- --f-----------�----------�-----------t--·------
--�-----------
¡----------�---- ------4-----------�----------�-----------·-----------�-----------1
1 1 1 1 1 1 1 ---------L-----------L----------�-----------L-----------L-----------1 1 1 1 1 1 1 1 _____ ---J-----------�-----------L----------J-----------¿·----------L-----------1 1 1 1 1 1 1 1 -------�-----------l-----------L----------J-----------l-----------L-----------1
1 1 1 1 1 1
' o e, o
,,, ,:, o .;:,
Barra: PCOBRE_11 fre:uer.c1a (H:)
Analisis de Arranque de Motor
Arrnonicos
- Anali,is é� Aro-,nicc,
Fig 27: Curva de Impedancia/Frecuencia - Barra Bus3 11 kV
100,n �1)0) eoo,, /i)O()
6(11)) 5(11),)
> 400·) .., 301)<) o 200) 4 1000 ..J "
� ., ::,: -101)) 1 ., -200) � d -301)) :..
;. -4000 -500)
-600) -iúO)
-f.000
-901),) -lC11JOv
o
------r-----,------�------r------r------r-----,------�------T------r------.------1
======�=====j-==---1--===-t======�======�=====�======�======i======�======�======i
------�--- �------�------� ----�------�-----�------�------+------�------�-----� 1 1 1 1 1 1 1 1 1 1 1 1 ------�- --�------�------�--- --�------�-----�------�------�------�------r------1
______ 1 -----:-------4------:----- f ------: ----- :------�------:------: ------: ------: _____ J ______ J ______ l------� -----L-----J------�------i ______ L ............ L ______ I
1 1 1 1 1 1 1 1 1 1 t 1 --- __ ._ _____ ..... ---...... ------�------�- ---..... -- --....... ---__ ,.. ___ ---· - -----�- - - - -..... ------•1 1 T 1 1 1 1 1 T 1 1 1- ----�-----�------4------�------�--- --�-----�------�------+------�------�-----� 1 1 1 1 1 t 1 1 1 1 1 1 -----r ----.. -,- .. ----,-------r------,..--.. - .. ,... -----..,------,----.. -T .. -----r--.. ---,...------,
1 1 1 1 1
1 1 1 1 1 1 T 1
------L _____ j ______ j ______ L------L------L ____ J ______ J ______ ¡ ______ L------L---- ... 1 1 1 1 1 1 1 1 T 1 1 1 1
------�-----�------�------�------�------�- ---�------�------•------�------�--- __ , t 1 1 1 1 1 1 1 1 1 1 1
------r-----,------�------r------r------r-- -..,------,------T------r------,-- ----,
------t ----- �------i------�------�--.. ---t---- 1- -- --- �------+ ------� ------� -----: ------ L ............. j ______ J------L------L------L-----j ____ J ______ i ______ L .............. ------1
1 1 1 1 1 1 1 1 1 1 1 1 ------L---..... j_ ----_j __ ----'------... L ... --- ..... L ... ---_j_ -- --J ...... -___ i _ ... ___ ... L ... _ --L---- ...... 1
1 1 1 1 1 1 1 1 1 1 1 1 ------�-----�------1------�------�------�-----�---- �------�------� -----,..------, 1 1 1 1 1 1 1 1 1 1
------r-----,------,------r------r------r-----..,------, _____ T _____ r------,------1
---- --L- - -- - J ... -- ___ J __ ---- 1. ...... --- -L---- ..... L ... ____ .J ______ J___ _ __ ... L .. _____ L ______ 1 1 1 1 1 1 1 1 1 1 1 t
.., o
"' o
'.0 o
...,,,o
... "' o
"' o
1) ... o
w e o
,,, w o
Barra : PCOBRE_ 11 Anqulo fGrados)
IñD's l) 2.'660\
Analisis de Arranque de Motor
Armonlcos
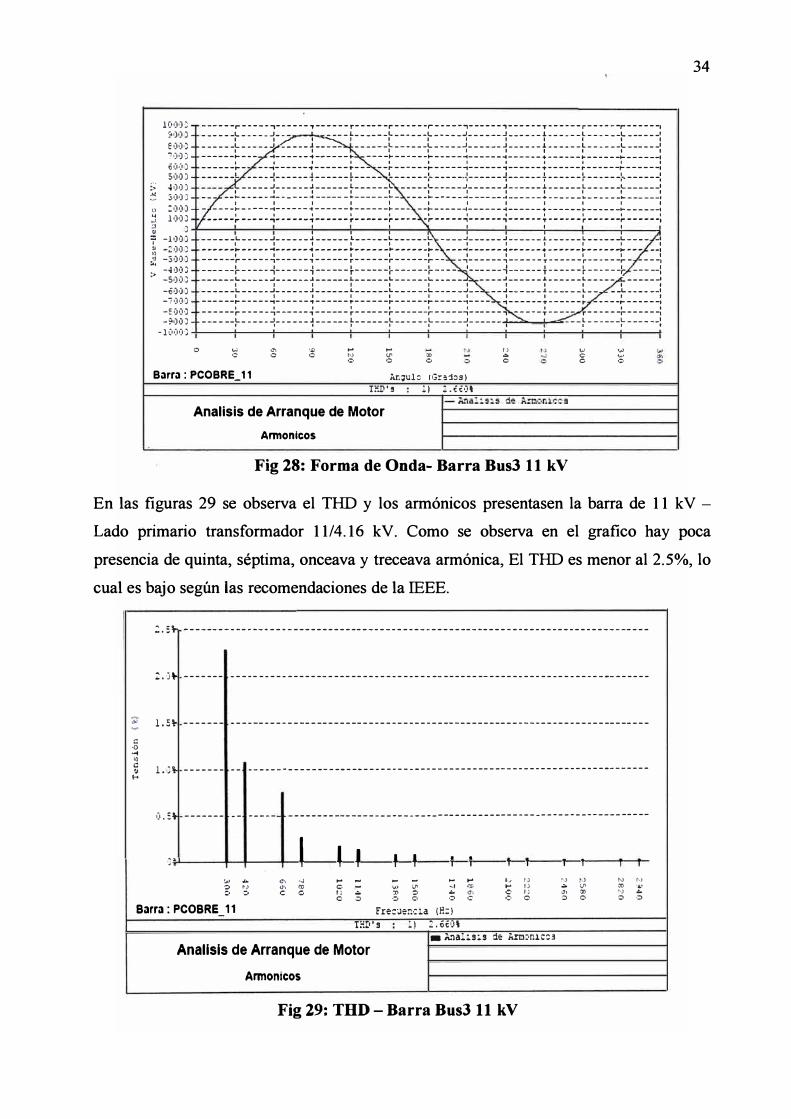
Fig 28: Forma de Onda- Barra Bus3 11 kV
34
En las figuras 29 se observa el TIID y los armónicos presentasen la barra de 11 kV -
Lado primario transformador 11/4.16 kV. Como se observa en el grafico hay poca
presencia de quinta, séptima, onceava y treceava armónica, El THD es menor al 2.5%, lo
cual es bajo según las recomendaciones de la IEEE.
:.s� ---------------------------------------------------------------------------------
z. •)\ ------- ------------------------------------- ----------------- -------- --- -- ------
� 1,5\ ------- -------------------------------------------------------------------------
.g ...."� l.•H ------- -- ----------------------------------------------------------------------¡..
ü.5� ------- -- ----- ---------------------------------------------------------------
,¡-1 1 1 1 1 1 1 1 r 1
"' ... "' ... ... ,.. .... ,.. o ., e� 0) o ,.. "' "' o o o o " ... ,:o o
o o o o
Barra : PCOBRE 11 frecuencia
Ti!D's l)
Anallsls de Arranque de Motor
Armonicos
. . 1 1 1 1
.... ... 1) ,,_, .,, ... ,.,... "' o ll
o o ,:, o
(Hz)
2.6€0\
• Analtsis de A..'"lll•)niCC3
Fig 29: THD - Barra Bus3 11 kV
1
"'... a,
o
1
) V' "' o
N N "' ·�" ... o o
35
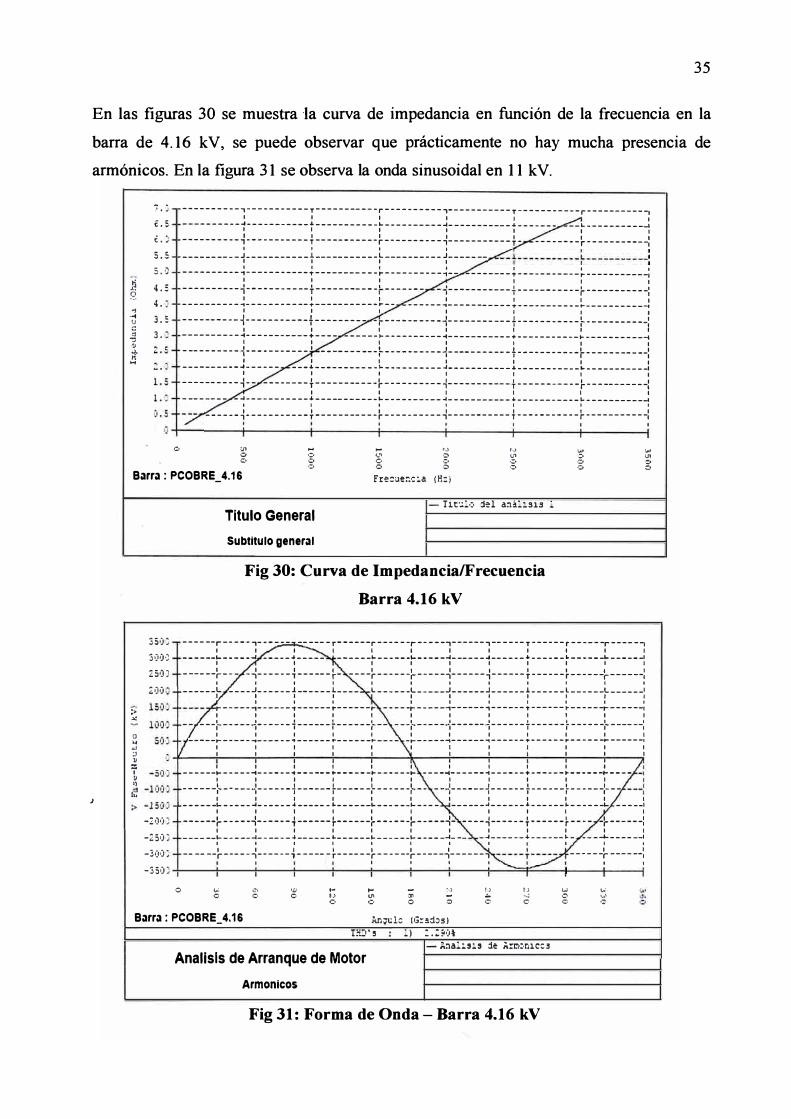
En las figuras 30 se muestra la curva de impedancia en función de la frecuencia en la
barra de 4 .16 k V, se puede observar que prácticamente no hay mucha presencia de
armónicos. En la figura 31 se observa la onda sinusoidal en 11 kV.
J
7. ,)
' e �- -
,;, <)
- o "·-5.0
F, J;, 4.5 !?.
4., ., ...
3.5 u e " 3. •)
'O '11
íl· ... "'·
"'
----------,-----------T-----------r----------,-----------T-----------r-----------1 1 1 1 1 l 1 ----------�-----------�-----------�----------�-----------�------- ---�----------� 1 1 1 1 1 1 1 I 1 1 1 1 1 1 ----------,-----------T----------·r-·--------,-----------r· ------·-r·----------,1 t 1 1
__________ J ___________ 1 ___________ L __________ J _____ _ _ 1 1 1 1 1 1 1 1 1 1 1 ----------�-----------�-----------�----------�-- --------�-----------�-----------, 1 1 1 1 1 1 1 1 1 1 1 1 1 ---------- ,-----------1 ----------- , ------- - .----------- 1 ----------- 1 -----------. 1 1 1 1 1 1 1 ----------�-----------T-----------�-- ------�-----------T-----------�----------� 1 1 1 1 1 1 1
----------i------·----:--------- ·1
---------- :-----------+-----------: .., _________ :1 1 1 1 1 1 1 ----------�-----------+---- ------�----------�-----------+-----------�----------; l 1 1 1 1 1 1 ---------- :----------- · ----------: ---------- :-----------: -----------r-----------: 1 1 1 1 1 1 1 ----------�------ ---·-----------�----------�-----------·-----------�-----------· 1 1 1 1 1 1 1
----------1-- --------+-----------r----------1-----------+-----------t-----------: 1 1 1 1 1 1
-------- -�-----------·-----------�----------�-----------·-----------�----------� 1 1 1 l 1 1 1
1 1 1 1 1 t 1 ------,-----------T-----------r----------,-----------r·--------·-r·----------, '
V, ... ... '" '" .., o ,:, .,, o "" e, .,, e, o e, e, e, e, ·-·
C• o o o o o
Barra : PCOBRE_ 4.16 Frecuencla (H:;
350•)
3ül)tJ
25ú 1)
ZOú
> -"
o ..., :, V
:,; 1 V " '"
-201i·J
-251),)
-3(u),J
-351),)
o
Titulo General
Subtitulo general
- Titu:,, del a:iállsis l
Fig 30: Curva de Impedancia/Frecuencia
Barra 4.16 kV
------r----- ,------ ------r------r------r-----,------,------y------r------r------, 1 1 1 1 1 1 I 1 1 1 1 1
------�-----� -----·----- ------�------�-----�------�------·------�------�------1 1 1 1 1 1 1 1 1 1 l
------�--- -�------{------t- ----�------�-----�------i------f------�------�------: 1 1 1 1 1 1 1 1 1 1 1 1
------� ----�------1------t---- L------�-----�------�------t------}------�------: 1 1 1 1 1 1 1 1 1 1 �-----�------,------r------� -----�-----�------�------T------t------�-----4
1 1 1 1 1 1 1 1 1 1 1 1 -- ---: ----- :---- ... - :------:------:-- ---: ----- :------ :------:------:------: ------:1 1 1 1 1 1 1 1 1 1 1 1 -----�-----�----... -�------�------�---- -�-----�------�------�------�------�------· 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
------�-----�------�------P------�------� ----�------�------+------�-----+----! 1 1 l 1 1 1 1 1 1 1
------: ----- :------:------:------:-------: -- -- :------ :------:------: -- ... ---:---1 1 1 1 1 1 1 1 1 1 1 1
------� -----�------.. ------ �------�------5-.---- ------�------·------�------� ---__ , 1 1 1 1 1 1 1 1 1 1
------�-----�------i------�------�--... ---�-----�- ----i------+------}---- -�------: 1 1 1 1 1 1 1 1 1 1 1 1
------�-- - __ _.. ______ ... __ ----'-------�------�- -----1- -- -�------·------�- ----1-------1 1 1 1 1 1 1 1 1 1 1 1
------�-----�------4------t------�------�-----�------, ------�-----�
w o
º'
o '/) o
... I> e,
1 1 1 1 1 1
..."',:,
-"' o
N ..
o
IJ ... o
"._¡ o
"' o o
w <.,,I ,:,
Barra: PCOBRE_ 4.16 Anoulc (Grados)
TliD's 1) Z.290%
Anallsls de Arranque de Motor
Armonicos
- Anal!.sis de ArC1-,nico3
Fig 31: Forma de Onda - Barra 4.16 kV
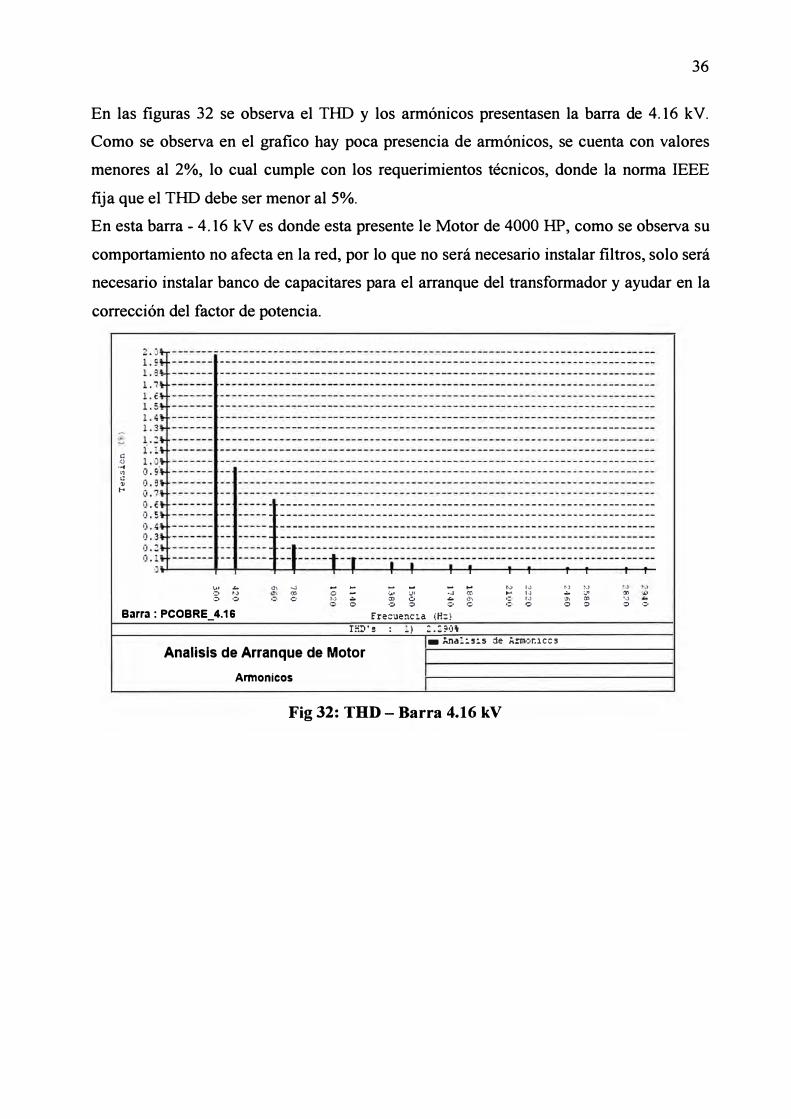
36
En las figuras 32 se observa el THD y los armónicos presentasen la barra de 4.16 kV.
Como se observa en el grafico hay poca presencia de armónicos, se cuenta con valores
menores al 2%, lo cual cumple con los requerimientos técnicos, donde la norma IEEE
fija que el THD debe ser menor al 5%.
En esta barra - 4 .16 k V es donde esta presente le Motor de 4000 HP, como se observa su
comportamiento no afecta en la red, por lo que no será necesario instalar filtros, solo será
necesario instalar banco de capacitares para el arranque del transformador y ayudar en la
corrección del factor de potencia.
e: -O ... " e:"'!-<
,., ...
o t-.) ·� o
Barra : PCOBRE_ 4.16
ª' ._, "' ,:, o
- -
;;;,..
o ... u, '" ... 00 o
o o o
Frecuencia
TED's : l)
Analisls de Arranque de Motor
Armonicos
- ...
·> "" ... "' o o
(H:)
2.290\
• Analisis de
Fig 32: THD - Barra 4.16 kV
tv '" " "'... '" .:. e• 00
,:, IJ "' 00 . _,
,:, o o o o e,
A..'"Ll•)niC03

CONCLUSIONES Y RECOMENDACIONES
Como Conclusiones tenemos:
• El arranque por arrancador electrónico es el más óptimo, usando la rampa de torque se
obtiene un arranque suave y no comprometemos el límite térmico del motor.
• Según el análisis de armónicos los niveles de TIID están por debajo del 4%, lo cual
esta dentro de lo permitido (5% según la IEEE).• Al observar los métodos de estrella triangulo y autotransformador las tensiones están
denn:o de lo permitido, pero el problema es que los tiempos son largos y se llega a
recalentar el motor (se supera el límite térmico).• Se observa que en arranque directo el sistema eléctrico se cae, lo cual pone en riesgo el
sistema eléctrico asociado al motor.
Como Recomendaciones tenemos: • Según las conclusiones anteriores, se recomienda que para arrancar el motor de 4000
HP se deberá utilizar el arrancador electrónico, por medio del tipo de rampa de torque.• Se recomienda instalar un banco de condensadores para mejorar el factor de potencia y
ayudar en el arranque del motor, ya que en el arranque consume mucha potencia
reactiva.
BIBLIOGRAFIA
[1] Norma NEMA MG-1, "Motores y Generadores", The Association ofElecrical
and Medica! Imaging Equipment Manufacturers.
[2] Stevenson & Grainger, "Análisis de Sistemas Eléctricos de Potencia", McGraw-
Hill.Inc
[3] M. Ventosilla Zevallos, "Sistemas Eléctricos de Potencia"
[ 4] IEEE Recommended Practice for Electric Systems in Health Care Facilities
[5] IEEE Recommended Practice for Industrial and Commercial Power Systems
Analysis
[6] IEEE Recommended Practice for Electric Power Distribution for Industrial
Plants
[7] Electrical Transmission and Distribution Reference Book , East Pittsburgh,
PA: Westinghouse
[8] Electric Machinery, New York: McGraw- Hill, 1961.
[9] Stevenson, Jr., W. D.,Elements of Power System Analysis