Embed Size (px)
Citation preview

Underground Mine Access Design toMaximise the Net Present Value
Kashyapa Ganadithya Sirinanda
Submitted in total fulfilment of the requirements of the degree of
Doctor of Philosophy
Department of Mechanical EngineeringTHE UNIVERSITY OF MELBOURNE
July 2015

Copyright c© 2015 Kashyapa Ganadithya Sirinanda
All rights reserved. No part of the publication may be reproduced in any form by print,photoprint, microfilm or any other means without written permission from the author.

Abstract
THE current methods of designing underground mine access do not maximise the Net
Present Value (NPV) of a mine over its life. Designing the access for underground
mines and scheduling its construction is a continual challenge for the mining industry.
To date, the scheduling and access design of an underground mine have only been con-
sidered as two separate optimisation problems. First, access to the mine is designed and
then the scheduling is completed. One drawback of this approach is that the costs of
access construction fail to be correctly reflected in the NPV calculation.
This research develops fundamental methods and efficient algorithms towards max-
imising the NPV for an underground mine subject to operational constraints. The NPV
is defined by taking the locations of ore bodies and their values, the decline construction
costs, the decline development rate and the discount rate into account. The process of
constructing the access can be classified according to the number of faces being devel-
oped concurrently. An underground mine with a single decline branching at a junction
point into two declines is considered. After construction reaches the junction, the two
faces of the decline can be developed sequentially or concurrently. Here, two algorithms
are proposed for optimally locating a junction point (Steiner point) to maximise the NPV
for both cases. The optimal mine access is presented for a range of discount rates.
A real mine consists with more junction points. An underground mine with two
junction points is considered. The algorithm that has been developed for the single face
operation is extended to locate two junction points to maximise the NPV. The optimal
locations of the junction points are obtained for a range of discount rates.
The gradient constraint defines the safe-climbing limit for mining trucks. A further
algorithm is proposed for optimally locating the junction point to maximise the NPV
iii

when the gradient constraint is active. This algorithm is applied to a case study where
two underground mines are joined using a connector. The aim is to maximise the NPV
associated with the connector.
iv

Declaration
This is to certify that
1. the thesis comprises only my original work towards the PhD,
2. due acknowledgement has been made in the text to all other material used,
3. the thesis is less than 100,000 words in length, exclusive of tables, maps, bibliogra-
phies and appendices.
Kashyapa Ganadithya Sirinanda, July 2015
v


Acknowledgements
I would like to convey my deepest appreciation to various people and organisations for
the immense amount of support I have received during my PhD candidature.
I would like to begin by expressing my earnest gratitude for my supervisors Doreen
Thomas, Peter Grossman, Marcus Brazil and Hyam Rubinstein. I count myself fortunate
to have received such professional and helpful supervision from them as well as having
a pleasurable learning experience. Without their expertise, support and patience, com-
pletion of this research would not have been possible. I am grateful for the dedication of
their valuable time to meet me every week and helping me continually, convincingly and
with great enthusiasm.
I was also lucky enough to receive support from the industry partner, Rand Mining
and Tribune Resources. I would like to particularly thank John Andrews for giving me
the opportunity to work on a project with relevance to industry and providing me with
data for a case study. I appreciatively acknowledge the financial support offered by the
University of Melbourne providing me a Gilbert Rigg scholarship as a living stipend
and the tuition waiver. As an international student without these scholarships my PhD
journey would have not been as smooth as this was.
I would like to thank Alexandra Newman from Colorado School of Mines, USA for
hosting me as a visiting scholar. The field trip was funded through the George Lansell
scholarship by the University of Melbourne. During that time I had a chance to visit open
pit and underground mines and make great contacts both in academia and the mining
industry. Working with her research group was fun and enjoyable. I learned to use
industrial software and presented my research to a large mining company in the US.
I also would like to thank Chris Manzie and his research group for giving me the op-
vii

portunity to present my research at their group presentations. This helped me to clearly
explain my research ideas and discuss concepts thoroughly to a non-specialised group.
The questions asked by them helped me to clarify a lot of doubts I had.
My thanks extend to my family and friends for their moral and ethical support and
encouragement especially during the hard times and being there for me and shaping me
to be who I am today.
I will be forever grateful to my noble friends for helping me in every possible way to
achieve my goal.
viii

To My Noble Friends...
ix


Contents
1 Introduction 11.1 Mine optimisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Underground mine access design . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Industry partner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Thesis layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Literature Review 92.1 Importance of the NPV calculations in the mining industry . . . . . . . . . 92.2 Operations research techniques in mining . . . . . . . . . . . . . . . . . . . 13
2.2.1 Optimising open pits to maximise the NPV . . . . . . . . . . . . . . 132.2.2 Optimising underground mines to maximise the NPV . . . . . . . 17
2.3 Access design of underground mines . . . . . . . . . . . . . . . . . . . . . . 212.3.1 Steiner networks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.3.2 Application of gradient-constrained Steiner networks in underground
mines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.3.3 The use of conic-sections to locate the Steiner point . . . . . . . . . 242.3.4 The use of mining equipment in development faces . . . . . . . . . 25
2.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4.1 Research questions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.4.2 Research plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3 Optimally locating a single discounted Steiner point without a gradient con-straint 293.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.2 Underground access construction process . . . . . . . . . . . . . . . . . . . 323.3 Optimally locating a single discounted Steiner point for one development
face . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.3.1 Discounted Steiner point degenerate cases . . . . . . . . . . . . . . 433.3.2 1-Face Discounted Steiner Point Algorithm . . . . . . . . . . . . . . 47
3.4 Optimally locating a single discounted Steiner point for two developmentfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 503.4.1 Discounted Steiner point degenerate cases . . . . . . . . . . . . . . 593.4.2 2-Face Discounted Steiner Point Algorithm . . . . . . . . . . . . . . 63
3.5 Numerical trials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
xi

3.5.1 Performance analysis of the 1-Face Discounted Steiner Point Algo-rithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.5.2 Sensitivity analysis of the 1-face discounted Steiner point algorithm 673.5.3 Performance analysis of the 2-Face Discounted Steiner Point Algo-
rithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 703.5.4 Performance comparisons of 1-face and 2-face discounted Steiner
point algorithms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4 Optimally locating a single discounted Steiner point in the presence of a gradi-ent constraint 754.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 754.2 Problem explanation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 784.3 Identification of the non-optimal labellings in the layout L1 . . . . . . . . . 834.4 Identification of the non-optimal labellings in the layout L2 . . . . . . . . . 884.5 Identification of the non-optimal labellings in the layout L3 . . . . . . . . . 894.6 Degenerate cases of the discounted Steiner point . . . . . . . . . . . . . . . 944.7 Locating the discounted Steiner point for the optimal labellings . . . . . . 95
4.7.1 Locating the discounted Steiner point when the optimal labellinghas at least two m-edges . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.7.2 Locating the discounted Steiner point when the optimal labellinghas exactly one m-edge . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.7.3 Locating the discounted Steiner point when the optimal labellinghas no m-edges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.7.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1144.8 Gradient-Constrained Discounted Steiner Point Algorithm (GCDSPA) . . 1154.9 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
5 Optimally locating multiple discounted Steiner points 1195.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1195.2 Iterative algorithm to locate two discounted Steiner points . . . . . . . . . 120
5.2.1 Problem modification to account for the time delays in the network 1215.2.2 Value aggregation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.3 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
a . . . . . . . . . . . . . . . . . . . . 1255.3.1 Calculation of the total NPV for Layout L2
a . . . . . . . . . . . . . . 1265.3.2 Algorithm to locate two discounted Steiner points for Layout L2
a . 1275.4 Extension of the 1-Face Discounted Steiner Point Algorithm to locate two
discounted Steiner points for Layout L2b . . . . . . . . . . . . . . . . . . . . 129
5.4.1 Calculation of the total NPV for Layout L2b . . . . . . . . . . . . . . 129
5.4.2 Algorithm to locate two discounted Steiner points for Layout L2b . 131
5.5 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
c . . . . . . . . . . . . . . . . . . . . 1325.5.1 Calculation of the total NPV for Layout L2
c . . . . . . . . . . . . . . 1325.5.2 Algorithm to locate two discounted Steiner points for Layout L2
c . 134
xii

5.6 Further improvement to locate multiple discounted Steiner points . . . . . 1365.7 Numerical trials . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1375.8 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
6 Case study 1416.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1416.2 Designing the Rubicon and Hornet connector . . . . . . . . . . . . . . . . . 142
6.2.1 General aim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1436.2.2 Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1446.2.3 Assumptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1446.2.4 Anticipated outputs from the case study . . . . . . . . . . . . . . . 1446.2.5 Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
6.3 Case study data preparation . . . . . . . . . . . . . . . . . . . . . . . . . . . 1456.3.1 Calculation of the gross and net values . . . . . . . . . . . . . . . . 1456.3.2 Enumeration of cases . . . . . . . . . . . . . . . . . . . . . . . . . . . 1476.3.3 Values aggregation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
6.4 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1516.4.1 Breakout point at R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1516.4.2 Breakout point at R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1526.4.3 Breakout point at R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1526.4.4 Breakout point at R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . 1526.4.5 Globally Optimal solution . . . . . . . . . . . . . . . . . . . . . . . . 153
6.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
7 Conclusion 1597.1 Summary of findings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
7.1.1 Locating a single discounted Steiner point - unconstrained problem 1597.1.2 Locating a single discounted Steiner point - constrained problem . 1607.1.3 Locating two discounted Steiner points - unconstrained problem . 1617.1.4 Case study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161
7.2 Publications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1627.3 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7.3.1 Extension of the algorithms . . . . . . . . . . . . . . . . . . . . . . . 1627.3.2 Further improvement . . . . . . . . . . . . . . . . . . . . . . . . . . 1637.3.3 Decline optimisation tool to maximise the NPV . . . . . . . . . . . 163
A Scheduling access construction and ore extraction for a range of simultaneousfaces 165A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 165A.2 Problem formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167A.3 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
A.3.1 Underground mine with two branches . . . . . . . . . . . . . . . . 172A.3.2 Underground mine with three branches . . . . . . . . . . . . . . . . 178
A.4 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184A.5 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
xiii


List of Figures
2.1 Classification of mine optimisation algorithms . . . . . . . . . . . . . . . . 142.2 Example for two dimensional method . . . . . . . . . . . . . . . . . . . . . 142.3 General stope layout for the sublevel stoping method [1], Fig.1 . . . . . . . 182.4 Nine-stope layout [2], Fig.3 . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.5 Feasibly optimal labellings for a degree-three Steiner point . . . . . . . . . 242.6 The cones C0 and C1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.7 Three boom jumbo drilling rig - DD530 . . . . . . . . . . . . . . . . . . . . 262.8 Mining vehicular equipment . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 A schematic representation of a simple underground mine . . . . . . . . . 323.2 A number of possible development faces can be developed at a time in this
problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.3 Vector representation of the problem . . . . . . . . . . . . . . . . . . . . . . 393.4 The geometric parameters of the problem . . . . . . . . . . . . . . . . . . . 423.5 The discounted Steiner point degenerate cases . . . . . . . . . . . . . . . . 443.6 Geometric construction of the discounted Steiner point . . . . . . . . . . . 503.7 Vector representation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 543.8 The geometric parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . 573.9 The optimal locations of the discounted Steiner point for a range of dis-
count rates with a single development face . . . . . . . . . . . . . . . . . . 653.10 NPV improvement for a finite range of discount rates with the single de-
velopment face . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.11 The degenerate cases of the discounted Steiner point . . . . . . . . . . . . . 683.12 Variation of the NPV improvement for a range of development rates . . . 693.13 Variation of the NPV improvement for a range of cost rates . . . . . . . . . 703.14 The optimal locations of the discounted Steiner point for a range of dis-
count rates with two development faces . . . . . . . . . . . . . . . . . . . . 713.15 NPV improvement for a finite range of discount rates with the two devel-
opment faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.16 The optimal locations of the discounted Steiner point for one and two de-
velopment faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 733.17 NPV improvement by applying the 2FDSPA compared with the 1FDSPA . 74
4.1 The representation of the edge pq . . . . . . . . . . . . . . . . . . . . . . . . 774.2 A schematic representation of a simple underground mine . . . . . . . . . 784.3 The possible network layouts that need to be considered for this problem 81
xv

4.4 The locations of the points p0, p1, p2 in the layout L1 . . . . . . . . . . . . 834.5 The edge sp1 or sp2 is labelled as a b-edge in the layout L1 . . . . . . . . . 834.6 The edge p0s is labelled as an f -edge in the layout L1 . . . . . . . . . . . . 844.7 Non-optimal labellings when the edge p0s is a b-edge in the layout L1 . . 864.8 Non-optimal labellings when the edge p0s is an f -edge in the layout L1 . . 874.9 The locations of the points p0, p1, p2 in the layout L2 . . . . . . . . . . . . . 894.10 The locations of the points p0, p1, p2 in the layout L3 . . . . . . . . . . . . . 904.11 The edge p0s or sp1 is labelled as a b-edge in the layout L3 . . . . . . . . . 904.12 The edge sp2 is labelled as an f -edge in the layout L3 . . . . . . . . . . . . 914.13 The edge p0s is labelled as an m-edge in the layout L3 . . . . . . . . . . . . 924.14 Labelling b f . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 944.15 Intersections of cones C0, C1 with different relative locations . . . . . . . . 954.16 Special cases of intersections of cones C0, C1 . . . . . . . . . . . . . . . . . . 964.17 When the Steiner point meets m-edges . . . . . . . . . . . . . . . . . . . . . 964.18 When the intersection of two m-edges is a line or a circle . . . . . . . . . . 984.19 Embedding of the labelling mb to a single b-edge . . . . . . . . . . . . . . . 994.20 The procedure for determining the optimal location of the discounted Steiner
point for a given optimal configuration . . . . . . . . . . . . . . . . . . . . 1024.21 Labellings m f b, f mb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1074.22 Locating the discounted Steiner point for the labelling f f m . . . . . . . . . 1084.23 Equiangular conditions for the labellings f f f , f f f , f f f . . . . . . . . . . . 1134.24 Labelling f f b . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
5.1 Locating two discounted Steiner points . . . . . . . . . . . . . . . . . . . . 1205.2 Basic layouts for a network with two discounted Steiner points . . . . . . 1215.3 New problem to account for time delays in the network . . . . . . . . . . . 1225.4 Aggregated value at the discounted Steiner point . . . . . . . . . . . . . . 1255.5 The NPV calculations for Layout L2
a . . . . . . . . . . . . . . . . . . . . . . 1265.6 Step 1 for Layout L2
a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1275.7 Step 2 for Layout L2
a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1285.8 The NPV calculations for Layout L2
b . . . . . . . . . . . . . . . . . . . . . . 1305.9 Step 1 for Layout L2
b . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1315.10 Step 2 for Layout L2
b . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1325.11 The NPV calculations for Layout L2
c . . . . . . . . . . . . . . . . . . . . . . 1335.12 Step 1 for Layout L2
c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1345.13 Step 2 for Layout L2
c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1355.14 The optimal locations of the discounted Steiner points in Layout L2
a . . . . 1385.15 The optimal locations of the discounted Steiner points in Layout L2
b . . . . 1385.16 The optimal locations of the discounted Steiner points in Layout L2
c . . . . 139
6.1 Location of Kundana [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1426.2 Kundana Mines [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1426.3 Stope layout of Rubicon and Hornet mines [3] . . . . . . . . . . . . . . . . 1436.4 The Rubicon and Hornet Connector . . . . . . . . . . . . . . . . . . . . . . 1436.5 Values aggregation for Case 9 . . . . . . . . . . . . . . . . . . . . . . . . . . 1486.6 Optimal solution for the case study . . . . . . . . . . . . . . . . . . . . . . . 153
xvi

A.1 Underground mine with decline access . . . . . . . . . . . . . . . . . . . . 166A.2 The optimal scheduling scheme for the one face operation . . . . . . . . . 172A.3 Gantt chart for the one face operation . . . . . . . . . . . . . . . . . . . . . 172A.4 The optimal scheduling scheme for two simultaneous faces . . . . . . . . . 173A.5 Gantt chart for two simultaneous faces operation . . . . . . . . . . . . . . . 174A.6 The optimal scheduling scheme for three simultaneous faces . . . . . . . . 174A.7 Gantt chart for three simultaneous faces operation . . . . . . . . . . . . . . 175A.8 Variation of the NPV with the number of faces . . . . . . . . . . . . . . . . 176A.9 Variation of scheduling periods with the number of faces . . . . . . . . . . 176A.10 Variation of solution time with the number of faces . . . . . . . . . . . . . 177A.11 Average start scheduling time for various numbers of faces . . . . . . . . . 177A.12 The optimal scheduling scheme for the one face operation . . . . . . . . . 180A.13 The optimal scheduling scheme for a two faces operation . . . . . . . . . . 181A.14 The optimal scheduling scheme for a three faces operation . . . . . . . . . 182A.15 Variation of the NPV with the number of faces . . . . . . . . . . . . . . . . 183A.16 Variation of the total scheduling periods with the number of faces . . . . . 184A.17 Variation of the solution time with the number of faces . . . . . . . . . . . 184A.18 Variation of the computational time with the size of the underground mine 185
xvii


List of Tables
2.1 The optimal labellings and the degree of the system of equations . . . . . 23
3.1 Variation of the NPV for a range of discount rates in the single face operation 663.2 NPV improvement for a range of discount rates when applying the 1FDSPA 663.3 Variation of the NPV improvement for a range of development rates . . . 693.4 Variation of the NPV improvement for a range of cost rates . . . . . . . . . 703.5 Variation of the NPV for a range of discount rates with two development
faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 713.6 Improvement of the NPV for finite discount rates with the two develop-
ment faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.7 The comparison of the 1FDSPA and 2FDSPA for a finite range of discount
rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.1 The variation of the labels for a small perturbation of the discounted Steinerpoint in the layout L1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.2 The variation of the labels in tree T to T′ for a small perturbation of s . . . 874.3 The variation of the labels in tree T to T′ for a small perturbation of s . . . 884.4 The variation of the labels for a small perturbation of the discounted Steiner
point in the layout L3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 914.5 The variation of the labels in tree T to T′ for a small perturbation of s . . . 934.6 Optimally locating the discounted Steiner point in a gradient-constrained
discounted Steiner tree . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.1 Improvement of the NPV for Layout L2a . . . . . . . . . . . . . . . . . . . . 138
5.2 Improvement of the NPV for Layout L2b . . . . . . . . . . . . . . . . . . . . 139
5.3 Improvement of the NPV for Layout L2c . . . . . . . . . . . . . . . . . . . . 139
6.1 A set of potential breakout points on the existing Rubicon access . . . . . . 1456.2 A set of drawpoints (one for each level) on Hornet. . . . . . . . . . . . . . . 1466.3 Calculation of net values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1476.4 Aggregated values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1506.5 Optimal labellings and the optimal location of the junction point when the
breakout point is at R1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1546.6 Optimal labellings and the optimal location of the junction point when the
breakout point is at R2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
xix

6.7 Optimal labellings and the optimal location of the junction point when thebreakout point is at R3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156
6.8 Optimal labellings and the optimal location of the junction point when thebreakout point is at R4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
6.9 Globally optimal solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
A.1 Variation of NPV, total scheduling periods and solution time with the num-ber of faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
A.2 Variation of the NPV, total scheduling periods and solution time with thenumber of faces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183
xx

Chapter 1
Introduction
THE mining industry does not have reliable, accurate or well established algorithms
for simultaneously designing the access network for an underground mine and
scheduling its construction. Until now underground mine access has not been fully ac-
counted for in maximising the Net Present Value (NPV).
1.1 Mine optimisation
Designing the access and scheduling the construction of underground mines have been
a continual challenge for the mining industry. This complicated process is treated as
two separate optimisation problems. Typically, first the access to the mine is designed to
minimise the total development and infrastructure costs. Second, the scheduling is com-
pleted to maximise the total generated cash flows throughout the life time of the mine.
One drawback with having two optimisation problems is that the access construction
costs are not correctly reflected in cash flow calculations. In fact optimisation of schedul-
ing is difficult and time consuming and outputs are often not reliable since the process
depends on the experience of the mining engineers. Therefore, current scheduling meth-
ods are slow and not guaranteed to yield the most profitable outcome. The problem
becomes even more complicated and hard to model when the scheduling is incorporated
with the access construction. The recognition of the need for reliable optimisation tech-
niques and better algorithms for the mining industry is the driving force in analysing this
problem in this thesis.
Money has a time value and it needs to be analysed in terms of a series of cash flows.
1

2 Introduction
Cash flows are brought forward in time with an appropriate discount rate. The discount
rate is the key variable of this process and it is used to discount future cash flows to the
present time. The cash flows are generated from operations (sales, materials, labour), fi-
nancing (incoming loan and loan repayment, taxes) and investments (purchased capital).
The summation of all these discounted cash flows is known as Net Present Value (NPV).
The NPV reflects the consideration of time value of money. The Present Value (PV) is the
value on a given date of a payment. NPV calculations measure the present value of the
future investment. In order to decide whether a company should start a project or not,
calculation of the NPV is critical. In general if the NPV is positive, then the investment
would add value for the firm and the project may be accepted. If it is negative, then the
investment would have a negative value for the firm so the project should be rejected.
If the NPV is zero, then the investment would neither gain nor lose value for the firm.
In that case this project adds no monetary value so a decision would be based on other
criteria such as strategic planning.
Mines can be classified into three main categories: open pit mines, underground
mines and combinations of both. Open pit mines are used when the resources are near
to the earth’s surface and the current methods for scheduling of open pit mines are re-
liable, accurate and relatively simple. It is surprising that solid mathematical models to
maximise the NPV for underground mines taking into account the access construction
do not exist. Most of the solutions derived from existing models are not optimal. In the
past decades there has been a major development towards maximising the NPV of open
pit mines. However at present limited work has been carried out to do this with the
construction of the access network in underground mines. One reason for this is that the
problem becomes more complicated with an increase in the number of underground ore
deposits. Hence this is harder to model mathematically.
The mining industry started to use optimisation techniques in the late 1960s and they
were initially used for the production scheduling of open pit mines. In later years these
results and some other ideas relating to open pit mines have been used to implement
mathematical models for underground mines. However, these techniques are applied to
specific mines and it is difficult to develop an underlying theory which can be used for

1.2 Underground mine access design 3
any underground mine. The reason is the complexity of the underground mine plan-
ning activities such as access development, drilling, stoping, blasting, milling, extraction,
stockpiling and backfilling. These tasks need to be carried out in a particular time period
and are performed throughout the life of the mine. Each task has a negative or positive
economic value. Usually positive values are derived from the ore production where cash
can be returned to the mining company after selling the mined materials. Access con-
struction and other operational activities are given negative cash flows since cash needs
to be used for haulage, equipment maintenance, purchase and running costs.
1.2 Underground mine access design
Access design for a mine depends strongly on the ground conditions and other geo-
technical factors. The three kinds of access methods are: a vertical shaft, a decline access
or combinations of both. A vertical shaft involves an opening through the mine strata. It
is used for hoisting personnel or materials and connects the surface with underground
workings. Generally, underground mines have a separate vertical shaft for ventilation
and/or services such as power and water. Decline access involves a sloping underground
passageway connecting one or more levels and a ramp to the surface. The ramp gradi-
ent must be within a safe climbing limit for trucks, typically in the range 1:9 to 1:7. A
minimum turning radius for curved ramps determined by trucks and other equipment
is typically in the range 15 to 40m. The underground access needs to be optimised both
topologically and geometrically subject to the gradient and the curvature constraints.
The process of constructing the access can be classified according to the number of
faces being developed concurrently. For example, consider an underground mine with a
single decline branching at a junction point into two declines. After construction reaches
the junction, the two faces of the decline can be developed sequentially or concurrently.
Jumbos and boggers are mine vehicles which are used in the development phase to con-
struct the access and extract the ore from an underground mine. The two faces can be
developed concurrently even with only one jumbo and one bogger.
The junction points, where three or more ramps meet, are mathematically known as

4 Introduction
the Steiner points. Junctions in the network are placed to avoid violating the gradient and
curvature constraints. They are represented by variable nodes in the network because
the optimal location of these nodes depends on the objective function. The optimisation
problem becomes more complicated, even with a single junction point, when subjected
to the gradient and the curvature constraints. When applied to a large number of under-
ground ore bodies, access design becomes a complex optimisation problem as different
connection patterns are available between ore zones. In such situations it is possible to
have different access network layouts or connection topologies to reach the underground
ore deposits. A network topology describes the connection patterns between the ore de-
posits and routes.
Studying how variation of the Steiner points affects the objective of maximising the
NPV is not a simple task. Identifying the optimal location of a Steiner point depends
on the time taken to reach its location. The decision of the placement of these points
depends on the order of reaching and extracting the ore and these depend on the value
of the mined material as well. Geometric optimisation using gradient and curvature
constraints and the time discount factor tightens the range of the solutions of the problem.
Furthermore when the number of ore deposits increases on a level, the number of extra
constraints such as sequencing and precedence increases. These considerations make it
very difficult to find the optimal solution mathematically.
The objective in this research is to develop efficient algorithms for designing access
and scheduling its construction for an underground mine to maximise the NPV over the
life of the mine. A major element of mine planning is the optimisation of the long term
production scheduling with the construction of the access network. The current indus-
try practice is to design the access first and then complete its scheduling. The problem
with this process is that the costs of access construction are not correctly reflected in the
NPV calculation. Until now, the mine access and scheduling its construction have not
been optimised simultaneously. However, in the proposed approach the schedule is not
optimised; instead the decline network is optimised to maximise the NPV for a given
schedule.
The problem of maximising the NPV is represented as a tree network problem where

1.3 Industry partner 5
the locations of the ore resource points are given and the junction points of the network
are to be obtained for a specific given objective function. In such problems the parame-
ters of the locations of ore deposits and corresponding values, development rate of the
declines, construction cost rate and discount rate are assumed to be given.
1.3 Industry partner
This research is supported by the companies Rand Mining and Tribune Resources. Both
companies share the East Kundana joint venture which is an operational underground
gold mining project located 25km north-west of Kalgoorlie, Western Australia. The Kun-
dana operations comprise three producing underground deposits, Raleigh and Rubicon-
Hornet. 51% ownership in the Kundana operations was acquired by Northern Star Re-
sources Ltd from Gilt-Edge Mining, a wholly owned subsidiary of Barrick Gold, on
March 1st 2014. Apart from Rand Mining and Tribune Resources, this research is funded
by a Gilbert Rigg scholarship and an ARC Linkage grant.
1.4 Thesis layout
The remainder of the thesis is laid out as follows. In Chapter 2, existing optimisation
techniques for open pits and underground mines are discussed. The current approaches
for scheduling and access design for underground mines are described.
In Chapter 3, Section 3.3, an algorithm is proposed to locate a single junction point so
as to maximise the NPV when a single development face is being deployed. The research
problem is formulated without considering the operational constraints first. Therefore,
in this chapter the fundamental, unconstrained problem has been studied and solved.
Section 3.4 examines the way to locate a junction point where there is enough equipment
available to complete two development activities simultaneously. The main advantage
of using two development faces is to reduce the mining equipment idle time because
with two development faces two decline links can be constructed at a time. Two al-
gorithms, the 1-Face Discounted Steiner Point Algorithm (1FDSPA) and the 2-Face Dis-

6 Introduction
counted Steiner Point Algorithm (2FDSPA), are proposed to optimally locate a single
junction point when a mine is being operated with one and two development faces re-
spectively.
In Chapter 4, the Gradient-Constrained Discounted Steiner Point Algorithm (GCD-
SPA) is proposed to optimally locate a single junction point when a mine is being oper-
ated with a single face and the gradient constraint is active in the network. Therefore,
in this chapter a constrained problem is investigated and all the optimal network con-
figurations with a single junction point are identified. Labelling is used to define a net-
work configuration. The label on each edge of the configuration is specified compared
to the maximum gradient. First, all the possible network labellings that could occur in a
maximum NPV network are considered. Then, non-optimal labellings are eliminated by
providing rigorous arguments. The optimal location of the junction point is obtained for
each optimal labelling.
In Chapter 5, the Extension of the 1-Face Discounted Steiner Point Algorithm (E1F-
DSPA) is proposed to optimally locate two junction points when a mine is being operated
with a single face and without considering the operational constraints. The idea is to use
the 1FDSPA defined in Chapter 3 iteratively. A real underground mine contains more
than a single junction point. The E1FDSPA is further improved to locate two junction
points based on the layouts. Three algorithms E1FDSPAa, E1FDSPAb, E1FDSPAc are
proposed to optimally locate two junction points for the three different layouts that can
occur.
Chapter 6 contains a case study based on the algorithm developed in Chapter 4.
The GCDSPA is applied for designing the optimal connector between two underground
mines. The aim is to maximise the NPV associated with the connector.
Finally, the conclusion is given in Chapter 7 which highlights potential areas for fur-
ther research.
Some early work was carried out which is different from the rest of the thesis and is
included in the appendix. This work was done to gain an understanding of the problem.
In the appendix a mathematical model is proposed to maximise the NPV for an access
network when the underground mine is being operated with a given number of faces.

1.4 Thesis layout 7
In this appendix a Mixed Integer Programming (MIP) model is formulated to schedule
the access construction and ore extraction process with constraints such as mining and
processing capacity, development, reserve, sequencing and precedence constraints. This
helps to identify an opportunity for further research in the development of underground
mine access to maximise the NPV which is discussed in Chapters 3-5.
In summary, the outcome of this research is a real step forward in the mining industry.
The results of the research can be used to design the optimal decline access network to
maximise the NPV when the gradient constraint is active or inactive in a network.


Chapter 2
Literature Review
THIS chapter outlines the existing mathematical models and optimisation techniques
that have been applied in the mining industry. The importance of Net Present Value
(NPV) calculations and the parameters that affect the NPV are discussed. The current
algorithms and techniques which are applied to open pit and underground mines to
maximise the NPV are described. The different objective functions and constraints are
discussed. Then the underground mine access design techniques to minimise the total
cost of a network are investigated.
2.1 Importance of the NPV calculations in the mining industry
Net Present Value is used to bring future cash flows to the present time and can be math-
ematically expressed as,
NPV =life time
∑t=0
PV(1 + d)t
where PV is the Present Value or initial value or value at time t equals zero, and d is the
discount rate. In this section, the important aspects and common practices that are used
by the mining industry to improve NPV are discussed.
The discount rate is generally decided by the mine/project owner’s Chief Financial
Officer (CFO) and is based on consultation with the central bank of the jurisdiction within
which the project resides. Devaluation, inflation and deflation factors need to be consid-
ered when selecting a discount rate [4]. Hence economists are also consulted during
the final modelling process as these numbers normally come from them and they are
generally within the major financial institutions that fund major mining projects such as
9

10 Literature Review
Barclays Capital, BNP Paribas, HSBC and Citibank. NPV must always be stated with the
impact of a specified discount rate for the currency based on US$ (United States Dollars)
or converted from local currency to US$. The reason for having the calculations in US$ is
that a large component of the technology and equipment imported is costed in US$.
In order for a project to be accepted, NPV should be a positive number. If the NPV
for a given project is negative then one has to look closely at the variable inputs and
assess which can be influenced (or designed) in a way to impact the NPV more posi-
tively. Common practices that are used by the mining engineers to increase the NPV
are, for example, to conduct more exploration and increase the resource size; to change
the extraction methodology to improve ore recovery and head grade; to change the pro-
cess methodology to improve metal/mineral recovery; to shorten the time to access the
ore body by changing the access methodology, such as changing the decline access de-
velopment method from mechanised drill and blast to tunnel boring; or to increase the
production rate from 1000tpd to 3000tpd.
NPV is the time-based value of money. In order to improve the NPV a model should
consider getting as much as possible of the metal or mineral to market as soon as possible.
An optimal mine design will deliver this, assuming the grade is economic in the first place
relative to the sustainable or long-term project’s market price. Sometimes the answer is
to leave it in the ground until better economic conditions prevail. Today there are many
projects under development that 20 years ago could not generate a positive NPV, but
which are now good projects as prices have increased substantially with demand, and
technologies have improved allowing extraction and processing to give better recoveries
of the grade.
Another way to achieve a higher NPV is by mining low grade at times of low price
and high grade at times of high price. If the mining company does this it might end
up better off in the long run. However, it might not be able to survive with the low
revenues and negative net cash flows generated by mining low grade during low price
times. The reality is that mines have little opportunity to make these sorts of decisions.
They do not have many parts of the ore body exposed so that production can readily
swap from one area to another. Rather, there is frequently a logical mining sequence that

2.1 Importance of the NPV calculations in the mining industry 11
must be followed, and even if there is not, there will still be a schedule in place that will
be effectively locked-in for some time, maybe for as long as two years, depending on the
complexity of the operation.
Next, how the market fluctuations of the price of the mined material affect the NPV
calculations will be analysed. Market fluctuations can be analysed through a sensitivity
analysis of the main influencing input factors. Typically within a given NPV model a
+10% to -10% variance factor within the key inputs are considered. Today sophisticated
software packages that use Monte Carlo Simulations (MCS) to model market fluctuation
of mined materials are available [5]. Monte Carlo Simulations use laws of probability
to predict the market fluctuations. The reality is modelling NPV beyond about 15 years,
even with MCS is difficult and beyond 20 years there is no real predictability. Some exam-
ples of the finest software for mine project design and schedule modelling for NPV gener-
ation are the Australian Whittle programs for open pits and the South African/Canadian
Mine24D for any complex underground scenario. Both use MCS in their architecture
and can generate multiple scenarios for doing trade-off studies on mine design selection
and decision making and both are accepted by major project financing institutions as the
state of the art for ensuring bank-ability for funding the construction of any project. These
software packages are expensive but are often used by consultants who have invested in
these packages. There are also simpler Excel-based models.
Another approach for dealing with the market fluctuations is to use stochastic mod-
elling of the prices of mined materials [6]. A good model will accurately represent how
the price may fluctuate over time. These techniques consider a distribution of NPVs
rather than a single NPV. Risk and Crystal Ball are two stochastic modelling packages
that are commercially available and commonly used as Add-ins to Excel. The problem is
not their use, as they get good distributions, particularly for things like prices and price
paths. However the results obtained from these models though they look realistic, are
not practical. While it might be good practice to have all this flexibility to respond to
changes in the market, the reality is that because of uncertainty in knowing what prices
will be with any degree of certainty in the future it becomes impossible in practice to
match production strategies with actual price movements.

12 Literature Review
In underground mines, development rates of the access drives are greatly influenced
by excavation design and size and excavation methodology. Both the access development
and the availability of mineable reserves for stoping, impact the time based value of
the ore body and hence the NPV. This basic principle can be applied equally to open
pit development, with overburden depths, stripping ratios life of mine, pit geometry,
long and narrow, shallow or circular, and deep or split shell or composite shapes and
multi pits. Equipment size and selection are key for geo-technical and stope design to
accommodate stripping optimisation and maximum ore recovery. A good design will
maximise both sustainability and hence NPV.
Next, the importance of stockpiling on NPV calculations is considered. The most
valuable materials, for example gold and diamonds are kept in-house and used when the
price increases and sold into the market. De Beers reputedly has large stocks of diamonds
that they release at times of their choosing to influence prices and maximise their profits.
However, as they have lost their market share in recent times, they cannot actually control
the market in that way any longer.
Stockpiling ore is common at open pit mines, but underground mines do not usually
stockpile. There is no purpose in mining ore underground if it is not going to be treated
immediately. The unmined reserve is effectively the stockpile. The exceptions for open
pits are in mountainous regions where there may not be the physical space to build stock-
piles. Assuming that the main constraint on the operation is the tonnage of ore that can
be treated, mining faster will allow the ore to waste ratio to be raised and higher grades
generating higher revenues to be sent to the plant, with lower grades stockpiled for treat-
ment later, perhaps even after mining has finished. There will be a trade-off between
the costs of mining more rock (from which the ore is separated) now and the revenue
generated from that ore.
Gold is stockpiled in a number of ways [7]. Central banks hold their nation’s gold
stocks and they can be big buyers or sellers sometimes with major impact on the markets.
After a bout of gold sales by some central banks perhaps 10 or 20 years ago, they have
tended to stabilise things by a mutual agreement. There is a significant personal hoarding
of gold particularly in a number of Asian societies where the women keep their wealth in

2.2 Operations research techniques in mining 13
gold coins and gold jewellery. Most companies prefer known cash now to no cash now
and maybe more cash later, but maybe not, or how much later? The USA, for instance
holds strategic stockpiles of various products just in case there is a war and they need
to produce but cannot get the required inputs. As with gold, they hold relatively large
stocks and a decision to reduce these stocks would immediately depress prices.
2.2 Operations research techniques in mining
Mining started several thousand years ago but computing in mining has evolved only in
the last four decades. Operations Research (OR) techniques have been developing in the
mining industry and many scholars see the opportunity to tackle these kind of problems
in the field using OR techniques. Despite this, there is a huge gap in the literature relating
to underground mine access design and scheduling its construction.
In 1978 Kim [8] summarised rigorous and heuristic algorithms that have been applied
to mine optimisation. The most common rigorous methods are dynamic programming
[9–13], graph theory [11,14,15] and branch and bound [16,17]. However, heuristic meth-
ods are adopted to decrease the computational time. Some of the techniques are linear
programming [18,19], moving cone [20,21], network flow [22–24], genetic algorithms [25]
and maximum value neighbourhood [26].
In Fig. 2.1, the optimisation techniques that are currently applied to the different areas
of mine optimisation are illustrated. However, only a few algorithms are related to the
scheduling or access design of underground mines. These methods and techniques will
be discussed in the following sections.
2.2.1 Optimising open pits to maximise the NPV
Open pit mines are used to mine materials that are found on or near the earth’s surface.
In the mining paradigm for open pit mines the first optimisation algorithms were in-
troduced by Lerchs and Grossmann [11]. The objective was to maximise the cash flow
which was defined as the difference between the total value of the extracted material
and the total extraction cost. They introduced two different mathematical algorithms.

14 Literature Review
Figure 2.1: Classification of mine optimisation algorithms
First, they proposed a dynamic programming approach to formulate the mine plan in
the two-dimensional plane. Later, they applied graph theory techniques to obtain a bet-
ter solution for the three-dimensional case or for a real mine. The authors assumed that
the value of the mine, extraction costs and geometry of the pits were given. They consid-
ered all the possible alternatives in their open pit design such as selection of the market,
installation of the plant, extraction quantities of the mined material, mining methods and
transportation facilities.
Figure 2.2: Example for two dimensional method
Fig. 2.2 shows the two dimensional method described by Lerchs and Grossmann [11].
In this method the ore bodies were divided into partitions known as blocks. The pit was
divided into a number of blocks where, if the divided block included ore it was assigned a
positive value. Otherwise a negative value was assigned for the block and it was treated
as waste. The algorithm determined whether and when to extract the mined material

2.2 Operations research techniques in mining 15
from the block or to leave it behind. The precedence constraints were used to schedule
the ore extraction in a sequential manner. This algorithm was established in 1965 and
was the first step in mine optimisation. The output of the algorithm was the optimum
digging pattern that provided the maximum cash flow. However, they were unable to
further extend their idea to underground mines. This algorithm explored alternatives in
pit design and generated the contour of the pit so as to maximise the revenue or the profit
of the mining company concerned.
Lane [27] in 1988 opened up a new frontier in optimisation for both open pit and un-
derground mine planning. In Lane’s model high importance was given to activities such
as processing and marketing (selling). Lane introduced the principle of cut-off grade
theory and how it affected the NPV. The definition of the cut-off grade was as follows:
material with a mineral content above the cut-off was scheduled for treatment; other ma-
terial was left or dumped as waste. In Lane’s model mineralised material was treated
as a resource. However, he observed that resources were actually finite and sooner or
later become depleted. Lane expressed the present values of mine resources as a function
of time, resource available and variables defining the exploitation strategy. Finally, NPV
was expressed in terms of the sum of present values. Unlike Lerchs-Grossmann, Lane
applied his findings to underground mines as well, such as lead/zinc and gold under-
ground mines as well as uranium and copper open pit mines.
Dagdelen [28] also implemented mathematical optimisation techniques for open pit
mines. He introduced strategies to improve the economics of the mining projects through
better planning. In his paper, Dagdelen criticised current optimisation techniques in mine
optimisation and explained the importance of proper planning through circular analysis.
This analysis was given by a flow chart using feedback. He mainly focused on managing
the mining tasks through using optimisation techniques.
In the literature, it is shown that Mixed Integer Programming (MIP) and Linear Pro-
gramming techniques (LP) are the most suitable approach to optimise the scheduling for
open pit mines [1, 2, 29–31]. In mixed integer programming models the binary variables
are assigned as follows: if the block is mined in scheduling period t then set that to 1,

16 Literature Review
otherwise 0.
xit =
1 if the ith block is mined during the time period t.
0 otherwise.
Ramazan and Dimitrakopoulos [29] introduced an efficient way to formulate the
problem of maximising the NPV for open pit mines. They identified the problems of
current MIP models such as the large number of binary variables, lack of efficiency and
the increasing gap which defines the difference between the real and optimal solution.
The aim was to maximise the total NPV with the operational constraints. In their model,
they considered more realistic constraints such as grade blending, mining and ore pro-
duction capacity constraints.
Ramazan and Dimitrakopoulos proposed an MIP model to solve the problem of max-
imising the NPV [29]. In their MIP model positive, negative and zero value blocks were
referred to as ore, waste and air respectively. The air blocks were ignored since the value
was zero. The major improvement of their model was that the number of binary vari-
ables was reduced from 15000 to 3000. For this reason, the computational time was de-
creased. CPLEX (IBM optimisation software package) was used to program the mathe-
matical model. The key feature of their model is that a block can be mined partially or
fractionally and in that way blocks are allowed to be scheduled in later time periods. A
weakness of their model is that the waste blocks must be fully mined for the optimality
of the MIP model. Furthermore, the authors stressed that the solution time in MIP mod-
els depends not only on the size (number of binary variables and constraints), but also
on the tightness of the model such as the data set used, the constraints and the objec-
tive function. The authors applied their model in real gold mines. They claim that their
model provides higher NPV and better performance than the other available models.
They suggested their model can be improved by minimising the mining of waste blocks.
The Mixed and Stochastic Integer Programming models (MIP and SIP) by Ramazan
and Dimitrakopoulos have similarities and differences [29, 32]. The authors improved
Dagdelen’s idea to perform better mine optimisation. They discuss the mixed and stochas-
tic integer programming techniques to maximise the NPV for open pit mines. The au-

2.2 Operations research techniques in mining 17
thors first developed MIP models but were not satisfied with their performance. Hence,
later they presented SIP techniques which were certainly an extension of MIP. They im-
plemented two different mathematical optimisation techniques in two articles [29, 32].
The SIP model discussed in [32] reduced the deviation costs from the planned produc-
tion targets whereas in [29] the objective was to maximise the net revenue without con-
sidering the deviation costs. Both articles used a CPLEX optimisation tool to obtain the
optimal results.
Since this research is concerned with underground mines, more emphasis will be
given to the scheduling and access design for underground mines.
2.2.2 Optimising underground mines to maximise the NPV
Underground mine scheduling is difficult compared with open pit mines because the
mine operation consists of many tasks such as access construction, ore extraction, devel-
opment, blasting, drilling, stoping, backfilling, milling and stockpiling. The best way
to tackle these problems is to formulate each mining activity by using a binary decision
variable. Mixed integer programming is a powerful tool that can be used in the optimi-
sation process similar to open pit mines. One advantage of MIP models is that they can
be applied to larger underground mines [1, 33–36].
Nehring et al. [1] applied MIP techniques to optimise the production schedule in un-
derground mining operations. They introduced two mathematical models for long-term
production scheduling in an underground mine for a sublevel stoping operation. The
sublevel stoping method is usually used when underground mining is carried out on a
large scale. Fig. 2.3 shows the typical sublevel stoping operation. First, the authors in-
troduced the classical MIP model where the objective was to maximise the NPV of each
process by dividing it into separate processes known as the typical production phase for
a stope. The four main activities of this process were development, drilling, extraction
and backfilling. In each process, the cash flows were considered separately. They claimed
that the solution obtained from their algorithms increased the efficiency of the solution
time substantially. Nehring et al. evaluated their algorithms by applying them to a real
underground mine and showed a 5.44% NPV improvement compared with the schedul-

18 Literature Review
ing done manually. The key feature of the MIP models discussed in [1] is that the number
of variables is reduced remarkably, thus obtaining the optimal solution efficiently.
Nehring [33] also formulated a long-term, a short-term and an integrated produc-
tion scheduling model by using mixed integer programming techniques. Two different
objective functions were discussed. First, for short-term production scheduling the ob-
jective was to minimise the deviation of targeted mill feed grade, whereas the long-term
method was to maximise the NPV. In the integrated version penalty terms were added,
which were generated from the short-term scheduling. The penalty was added, if the ore
tonnage was larger or smaller than the predefined targeted mill feed grade. However,
without the penalty function the objective function is the same as in his previous work
[1]. It is surprising to observe that the integration of a short-term and a long-term pro-
duction scheduling into a single mathematical model gives the globally optimal result.
This approach is more often suitable when the mined materials have variable grades.
Figure 2.3: General stope layout for the sublevel stoping method [1], Fig.1
Mixed integer programming was also used by Trout [37] in his modelling which was
used for multi-period production scheduling for a sublevel stoping copper ore mine lo-
cated in Mt Isa, Australia. The equipment and blending constraints were considered in
Trout’s model. Nehring [2] continued Trout’s work. In the objective function, cash flows
from the extraction and backfilling were considered individually. Capital cost, deprecia-
tion and taxation were not included in the objective function. The MIP model increased
the NPV 0.66 % compared to schedules done manually. However, this model was very

2.2 Operations research techniques in mining 19
complex as the author used a nine stope layout as illustrated in Fig. 2.4. To reach or ex-
tract the ore in the middle stope (E in Fig. 2.4) at least one of the other stopes around the
stope E must be extracted beforehand. This is a disadvantage because if the stope E has
more valuable ore, it will take more time to extract the ore at stope E causing a decrease
in the NPV. Nehring et al. [1, 2] and Trout [37] used similar objectives so as to maximise
the NPV in sublevel underground mining operations. In fact the approach of Nehring et
al. [1] is more suitable to use for a larger complex underground mine.
Figure 2.4: Nine-stope layout [2], Fig.3
Smith et al. [34] introduced the MIP model for a large scale mining project in Mt Isa
which was a combination of three mine operation plants: a lead concentrator, a zinc filter
plant and a lead refinery. The objective was to maximise the NPV over a ten year period
of time for all three plants simultaneously. This was a huge mine with 1500 stopes of
lead/zinc ore reserves. The authors describe an important technique for dealing with
the problem for a complex massive underground mine. The technique is to divide the
stopes into a number of blocks based on the following criteria: geological and metallur-
gical characteristics, similar mining costs and productions rates, supported by the same
capital infrastructure (access development, haulage system, ventilation) and extracted
by the same mining method. Smith et al. specifically differentiated cash flows for each
activity whereas the approach discussed in [1] considered cash flows for the complete
underground mine operation.
Rahal et al. [35] focused on mixed integer linear programming for the production
scheduling of the De Beers kimberlite mine in South Africa. The aim was to maximise
the net cash flows while maintaining a fixed production rate of 150,000 tons per month.

20 Literature Review
Therefore, extra constraints were added to the model which defined the production tar-
gets and the production towards the ideal profile. Smith et al. [34] and Rahal et al. [35]
both applied their algorithms to massive underground mines. However, the optimisa-
tion algorithm of Rahal et al. [35] should be used for low grade ore bodies because it is
suitable for underground mine operations with high capacity and low production costs.
McIsaac [36] continued the work of Rahal et al. [35] but with a different objective func-
tion which was to maximise the NPV for a long-term plan of an underground operation.
The objective function was stated in terms of the revenues, development costs, stoping
costs, fixed costs and the other costs. McIsaac was interested in the applications of mixed
integer programming in the mining industry and highlighted a dynamic tool to obtain
the desired optimal results.
In Topal [31] early start and late start algorithms improve the solution time for long-
term underground mine production scheduling. These algorithms assign an earliest and
latest possible start date for each machine placement. Machine placement is an important
aspect in an underground mine. Newman et al. [38] strongly emphasised the importance
of machine placement during the operation of LKAB’s Kiruna mine in Sweden which
employs a large-scale sublevel caving technique. The authors minimised the deviation
from the demanded quantities of each ore type rather than maximise the NPV. The au-
thors divided the initial problem into smaller parts and designed heuristic methods to
solve them. Both Topal [31] and Newman et al. [38] worked on the machine placement
at LKAB’s Kiruna underground mine. However, they used two different approaches to
tackle the same problem.
Mixed Integer Linear Programming (MILP) models were also implemented to max-
imise the NPV, while meeting grade blending, mining and processing capacities, and the
precedence of block extraction constraints [39, 40].
In his PhD thesis Tarrant [41] defined a mathematical model for underground mine
scheduling with extra constraints such as the development capacity, sales capacity, blend-
ing constraints, sequencing constraints, cut-off constraints and time cost constraints. The
production and development were considered separately in the objective function. How-
ever, he did not consider the development costs for the decline and crosscuts separately.

2.3 Access design of underground mines 21
All the techniques discussed above have only been applied for a given underground
mine access. As yet nobody has attempted to maximise the NPV when including the
design of the access of an underground mine. In the next section, underground mine
access design techniques are discussed.
2.3 Access design of underground mines
In the previous sections, optimisation techniques and mathematical models that have
been used to maximise the NPV for underground mines were discussed. In this section,
the access design techniques for underground mines are examined.
2.3.1 Steiner networks
The problem of length minimisation in a network was first investigated by Fermat in the
16th century. He posed the Fermat problem which is to find a fourth point such that the
sum of its distances to three given points in the plane is a minimum [42]. Later, this fourth
point was called the Steiner point. Algorithms have been developed to locate the Steiner
point. The first algorithm was proposed by Torricelli which was a geometric solution for
finding the Steiner point, also known as the Torricelli point [42]. Cavalieri showed that
the line segments from the given three points to the Torricelli point make angles equal to
2π/3 in his book Exercitationes Geometricae.
The initial problem posed by Fermat was extended to locate multiple Steiner points to
minimise the total length of a network. In 1934, Jarnik and Kossler tried to find a shortest
network (Steiner tree) which connects n points in the plane. However, their study was
limited as they define the n points to be at the vertices of a regular n-sided polygon. They
identified the shortest length network for n = 3, 4, 5.
Melzak [43] observed that a Steiner point connecting the three vertices of a triangle
is unique and if an angle of the triangle is greater than or equal to 2π/3 then the Steiner
point coincides with that vertex, otherwise the Steiner point lies inside that triangle. He
developed an algorithm to locate the Steiner points when the tree has n nodes, where n ≥
3. This proposed algorithm was effective but extremely redundant and inefficient. Gilbert

22 Literature Review
and Pollak [44] studied the properties of the Steiner trees including the degeneracy where
a Steiner point coincides with one of the vertices in the tree. The properties of a Steiner
tree include:
(i) No two edges of a Steiner tree can meet at an angle less than 2π/3.
(ii) A Steiner tree has no crossing edges.
(iii) Each Steiner point of a Steiner tree is of degree exactly three.
(iv) A Steiner tree for n points contains at most n− 2 Steiner points.
2.3.2 Application of gradient-constrained Steiner networks in undergroundmines
Designing the access for underground mines is a challenging process. Brazil et al [45]
represented underground access network design as a network tree problem where the
locations of the ore resources points are given and the junction points of the network
are to be obtained for a specific objective function. The objective of the problem they
analysed was to minimise both the development and haulage costs of an underground
mine. The authors used a variation of the Steiner tree problem to minimise the total cost
of the network. They studied underground mine access design processes and described
how to locate the Steiner points. However, they did not take the discounted cost into
account in their model and did not study the problem of locating the Steiner points with
the objective of maximising the NPV.
In [45], the authors considered a general situation of a mine with real haulage and
development costs and a gradient constraint. The problem was modelled as a variation
of the Steiner problem by considering a gradient metric. In the model, development and
haulage costs were modelled as a fixed cost rate. The gradient constraint is the most
important physical constraint on the access network and defines a safe climbing limit for
trucks, typically in the range 1:9 to 1:7. The maximum gradient is denoted by m.
Let p = (xp, yp, zp) and q = (xq, yq, zq) be two points in Euclidean space. Then the
gradient of the line pq is defined as g(pq),
g(pq) =|zq − zp|√
(xq − xp)2 + (yq − yp)2

2.3 Access design of underground mines 23
If g(pq) ≤ m then the points p and q are connected by a straight line in their model and
this is referred to as a straight edge. If g(pq) > m then the points p and q are connected
using a zigzag line. Such edges are called bent edges. The zigzag length can be repre-
sented by the vertical metric which is the distance in the vertical plane and given by |pq|v.
The length of the link that connects p and q can be written as,
|pq|g =
|pq| =√(yq − xp)2 + (yq − xp)2 + (zq − zp)2 if g(pq) ≤ m
|pq|v =√(1 + m−2)|zq − zp| if g(pq) > m
Furthermore, the authors [46] defined a scheme for labelling the edges as,
f - flat edge (if g(pq) < m)
m - maximum edge (if g(pq) = m)
b - bent edge (if g(pq) > m)
A labelling that can be achieved in a minimum length Steiner tree is referred to as a
feasibly optimal labelling. Brazil et al showed that for a degree three Steiner point, only
five feasibly optimal labellings are possible. These are f f / f , f f /m, f m/m, mm/m and
mm/b as shown in Fig. 2.5. The labelling gagb/gc means the edges a and b lie on one side
of the Steiner point and the edge c is on the other side of the Steiner point. The concept of
labelling is necessary to locate a Steiner point in Euclidean space. Brazil et al [47] showed
how to identify the location of a Steiner point for each optimal labelling. They found the
system of equations that needs to be solved to locate the Steiner point for each optimal
labelling in a gradient-constrained network and these systems are summarised in Table
2.1.
Labelling Degree of the equationb/mm linear, Equation (4.14)m/mm quadratic, Equation (4.13)m/m f quartic, Equation (4.17)m/ f f degree 8, Equation 8 in [48]f / f f quadratic, Equation 9 in [48]
Table 2.1: The optimal labellings and the degree of the system of equations

24 Literature Review
Figure 2.5: Feasibly optimal labellings for a degree-three Steiner point
2.3.3 The use of conic-sections to locate the Steiner point
Figure 2.6: The cones C0 and C1
The theory of conic-intersections has been used to locate the Steiner point in a gradient-
constrained network. Weng’s note [49] discussed the various intersections of two cones
taking into account their angles of intersection. This was later published in [48] Theorem

2.4 Conclusion 25
2.
Let C0 and C1 denote two right circular cones with vertices p0 and p1 respectively, and
let the generating angle for each of C0 and C1 be m as shown in Fig. 2.6. The intersection
of C0 and C1 is categorised according to the gradient g(p0 p1).
(i) if g(p0 p1) > m then the intersection is an ellipse.
(ii) if g(p0 p1) < m then the intersection is a hyperbola.
(iii) g(p0 p1) = m then the intersection is a line passing through p0 p1.
(iv) if p0 and p1 lie in a vertical line then g(p0 p1) = ∞ and the intersection is a circle
lying on a horizontal plane.
(v) If p0 and p1 lie in a horizontal plane then g(p0 p1) = 0 and the hyperbola lies in a
vertical plane.
2.3.4 The use of mining equipment in development faces
Mining equipment is used in the development phase to construct the access and extract
the ore from an underground mine. A jumbo is a machine with huge drill bits, as shown
in Fig. 2.7, which is used to construct the access of a mine. A truck which is shown in
Fig. 2.8a is used to transport ore and waste from underground to surface. A bogger (also
called a Load-Haul-Dump vehicle) which is illustrated in Fig. 2.8b usually operates near
the ore zones and excavates the mined materials.
In mining, the face is the surface where the mining work is advancing. Sometimes it is
better to operate more faces especially for a larger mine to quickly complete the process,
and by having more faces at a time the NPV is increased. Also the mine vehicles need
to operate efficiently. For example, two faces can be worked efficiently even if only one
jumbo and one bogger are available.
2.4 Conclusion
Optimisation techniques have been applied in the mining industry since 1965. This litera-
ture review discusses in detail the main concepts of mathematical modelling for open pit
and underground mines to maximise the NPV. Mixed integer programming techniques

26 Literature Review
Figure 2.7: Three boom jumbo drilling rig - DD530
(a) A truck (b) A LHD
Figure 2.8: Mining vehicular equipment
are used for both open pit and underground mines. Due to the complexity of under-
ground mine activities a large number of binary variables are used in the MIP models.
However, in some cases these are reduced by using heuristic techniques in order to obtain
the global optimal solution quickly.
This review of the relevant literature has identified an opportunity to develop algo-
rithms for designing the access to maximise NPV for underground mines. Current indus-
try practice is to design the underground access first and then to complete the schedul-
ing. One weakness with this process is that the costs of access construction are not fully
reflected in the NPV calculation. Until now underground mine access has not been de-

2.4 Conclusion 27
signed to maximise the NPV. Therefore, in this research, optimising the access design and
scheduling its construction simultaneously to improve the value is suggested.
2.4.1 Research questions
This research will focus on exploring the question of whether the optimisation of the ac-
cess design and scheduling of an underground mine can be carried out simultaneously.
The methods that are currently available perform the optimisation separately. This re-
search project seeks to answer the following specific questions:
1. How can a new theory for optimising the NPV be introduced to incorporate schedul-
ing the construction?
2. How can an algorithm be developed and implemented taking into account a gradi-
ent constraint on the declines?
3. How well does the developed algorithm perform on real mine data?
2.4.2 Research plan
A strategy for addressing the research questions established in this chapter is outlined in
the following. The research plan is summarised below:
1. Locating a single Steiner point or junction without the gradient constraint in order
to maximise NPV (Chapter 3).
As seen in the literature review the methods that are currently available perform
the optimisation of the access design separately from scheduling. One drawback
of this approach is that the costs of access construction fail to be reflected in the
NPV calculation. To answer this, geometric optimisation of the decline network is
investigated with scheduling. The aim is to place the junction of the underground
network to maximise the NPV without considering the constraints on underground
tunnels.
The underground mine access construction process can be classified according to
the availability of the mining equipment to develop a number of faces concurrently.
Algorithms are proposed to optimally locate the Steiner point when the mine is

28 Literature Review
being developed either with one or two development faces.
2. Locating a single Steiner point with the gradient constraint (Chapter 4).
The optimisation of underground mine access to obtain maximum NPV in the pres-
ence of a gradient constraint is focused on. The gradient constraint defines the
navigability conditions for trucks along the underground tunnels. The analysis is
based on a given surface portal or breakout point and considering whether the
resource points are above or below the Steiner point. The non-optimal network
configurations in the maximum NPV network are identified. Then for each optimal
configuration a method for locating the Steiner point is presented. An algorithm is
proposed to optimally locate the Steiner point in the underground mine.
3. Locating multiple Steiner points without the gradient constraint (Chapter 5).
The idea is to extend the algorithm discussed previously to locate multiple Steiner
points.
4. Apply the proposed algorithms for real underground mines (Chapter 6).
Acknowledgements
In Section 2.1, some of the data was provided by Brian Hall from AMC consultants, Aus-
tralia and Alan Clegg from Alexander Mining Plc, London, United Kingdom.

Chapter 3
Optimally locating a single discountedSteiner point without a gradient
constraint
THIS chapter presents a way of optimising underground mine access and scheduling
its construction to maximise the Net Present Value (NPV). As seen in the literature
review the methods that are currently available perform the optimisation of the access
design separately from scheduling. One drawback of this approach is that the costs of
access construction fail to be reflected in the NPV calculation. To address this, geometric
optimisation of the decline network is investigated with scheduling. In this chapter, the
aim is to place the junctions of the underground network to maximise the NPV without
considering a gradient constraint.
The underground mine access construction process can be classified according to the
availability of mining equipment to develop a number of faces concurrently. 1-Face and
2-Face Discounted Steiner Point Algorithms (1FDSPA, 2FDSPA) are proposed to opti-
mally locate the Steiner point when the mine is being developed with one and two de-
velopment faces respectively.
3.1 Introduction
The Steiner network problem deals with constructing a minimum cost network to inter-
connect a given set of locations known as terminals. Such networks may have construc-
tion and operational costs associated with their links and values associated with their
29

30 Optimally locating a single discounted Steiner point without a gradient constraint
terminals. In practical applications the associated costs may vary with time, making this
optimisation problem particularly hard to solve. Further, the costs and values which
generate cash flows in the networks may be discounted over time. Therefore, time has a
crucial impact on the value of such networks. The discount rate is the key variable of this
process and is used to discount the cash flows. The sum of all the cash flows is known as
the Net Present Value (NPV).
This chapter is motivated by a problem in optimal mine design which is to locate a
junction point in the access network of an underground mine to maximise the NPV. If the
location of the junction point is known, the process of constructing the mine access can be
scheduled. To date, the scheduling and access design of an underground mine have only
been considered as two separate optimisation problems. A weakness of this approach is
that the costs of access construction are not accurately reflected in the NPV calculation.
In this chapter, the design of the access and scheduling its construction are formulated as
a single optimisation problem to maximise NPV.
In the literature, the problem of designing the underground access is generally treated
as a tree network problem, where the locations of the ore resource draw points are given
and the junction points of the network are to be obtained for a given objective function.
To find a minimum length network connecting a set of given terminals or points, Steiner
points or junctions can be added to reduce the network length. This is the classical Steiner
problem [42] and in the Euclidean minimal Steiner tree, the angles at the Steiner point are
exactly 2π/3. However, the problem analysed in this thesis is different from this, as the
Steiner points will be located to maximise the NPV.
The optimisation of underground mine access has been studied by Brazil et al [45,48]
to minimise the development and haulage costs over the life of a mine. They modelled
the problem as a variation of the Steiner problem with a constraint on the gradient in
order to ensure navigability by trucks. The gradient constraint defines a safe climbing
limit for trucks, typically in the range 1:9 to 1:7. However, the discounted cost was not
taken into account in their model [45, 48]. When scheduling is considered, time value
of money has a crucial effect on locating the junction points in the access network for
maximum NPV.

3.1 Introduction 31
Optimisation of NPV for underground mines was introduced by Lane [27] in 1988.
He formulated the cash flows for the complete underground mining process. However,
his theory can only be applied to underground mines with a given access geometry. In
the past decade there has been some development towards maximising the NPV in un-
derground mines. Mixed integer programming is used in the optimisation processes in
[1, 2, 38]. However at present, limited work has been carried out to complete the design
and scheduling of the construction of the underground access network to maximise NPV.
This is one reason that geometric mine design will be incorporated with scheduling. In
each paper [1, 2, 38], the optimal mine design has its own unique features influencing
maximisation of the NPV. The NPV is simply a measure of the time based value of the
ore for given specific mine design parameters and underlying assumptions applied to
a known or assumed ore body size and geometry [30]. Different techniques have been
applied to different underground mines, however it is always assumed that the under-
ground access is given. From the literature, it appears that no-one has tried to develop
a generic theory which can be used for any underground mine. The recognition of the
need for reliable optimisation techniques and better algorithms for the mining industry
is the main motivation for investigating this fundamental optimisation problem.
A discounted Steiner network T is defined as the maximum NPV network spanning a
given set of nodes N in space. The nodes in T but not in N are referred to as discounted
Steiner points. The discounted Steiner points are added to the network in order to max-
imise the NPV. Two algorithms are proposed to locate the discounted Steiner point when
T has three terminals. Such a network will be called a simple discounted Steiner network.
NPV is defined by taking the values of the ore bodies, construction costs, development
rate and discount rate into account. The variable costs are formulated in terms of the
location of the discounted Steiner point. The discounted variable costs are generated
from the access construction process and the ore production. The total NPV is derived as
the combination of both discounted fixed and variable costs. The fixed costs include the
equipment maintenance costs, environmental management costs and fixed haulage costs,
and these costs are assumed to be given. The location of a discounted Steiner point de-
pends in particular on the time discount factor. It also depends on the order of reaching

32 Optimally locating a single discounted Steiner point without a gradient constraint
and extracting the ore resources and on the value of the mined material.
In the model discussed in the appendix, it is assumed that the geometry of the decline
network is given. Therefore, consideration of the placement of the junctions or Steiner
points is not required. Furthermore, in that model the declines are divided into portions
to allow the value to be discounted in a discrete manner. However, this approach will
not work when the Steiner points are located to maximise the NPV. The reason is that
the placement of the junctions depends on the development length and the rate of con-
struction of the declines. Strictly speaking this process is dependent on the development
time of the decline, which changes the NPV calculation. Therefore, the development
cost should be considered as an integral form rather than a sum. This idea has not been
previously investigated where the cost is formulated as a continuous function.
This chapter consists of six sections. In Section 3.2 the access construction process of
an underground mine is explained. In Sections 3.3 and 3.4, 1-face and 2-face discounted
Steiner point algorithms are proposed to optimally locate the discounted Steiner point
when the mine operates with one and two development faces. Section 3.5 presents nu-
merical trials to verify the performance of the 1-Face and 2-Face Discounted Steiner Point
Algorithms (1FDSPA, 2FDSPA). Finally, in the conclusion the contributions of this chap-
ter are given. The material on the 1FDSPA and the 2FDSPA is published in [50–52].
3.2 Underground access construction process
Figure 3.1: A schematic representation of a simple underground mine
Figure 3.1 shows the access network for a simple underground mine. Let p0 =

3.2 Underground access construction process 33
(x0, y0, z0), p1 = (x1, y1, z1), p2 = (x2, y2, z2) be the surface portal (or breakout point
from existing infrastructure) and the access points for ore deposits with values $V1 and
$V2 respectively. The aim is to locate the discounted Steiner point s which is given by
(x, y, z) to maximise the NPV. Let the distances l0, l1, l2 be the construction lengths from
p0, p1, p2 to s respectively, which are given by Euclidean distances since in this chapter
the gradient constraint is not active. The line segments p0s, sp1, sp2 are called decline links.
The underground mine access construction process can be classified according to the
number of faces being developed concurrently. If an underground mine operates with a
single development face, only a single decline link can be constructed at a time. First, the
decline link p0s with length l0 is constructed. After that, the second decline link sp1 of
length l1 is constructed. Then the point p1 is reached and ore at p1 is extracted. Finally,
the last decline link sp2 of length l2 is constructed. Then the point p2 is reached and ore at
p2 is extracted. If there is insufficient equipment to develop two faces then only a single
development face is possible.
If an underground mine operates with two development faces then two decline links
can be constructed at a given time. Therefore, after completing the construction of the
decline link p0s, the constructions of the second and third decline links sp1, sp2 are started
concurrently and then the points p1, p2 are reached. After that, the ore extraction process
starts at the points p1, p2. The main advantage of using two development faces is to
reduce the mining equipment idle time because with two development faces, two decline
links can be constructed at a time as shown in Fig. 3.2.
Figure 3.2: A number of possible development faces can be developed at a time in thisproblem

34 Optimally locating a single discounted Steiner point without a gradient constraint
The proposed algorithms will find the optimal location of the discounted Steiner point
for one and two development faces. Once this point is known, the access to the mine can
be determined by including the link between the discounted Steiner point and each of
the given terminals. In general, these links should represent minimum length naviga-
ble paths between the end points. However, in order to make the model as simple and
general as possible the navigability conditions are relaxed and the links are assumed to
be straight line segments in this chapter. A consequence of this assumption is that the
theory and the algorithm outlined can be directly applied to underground mines where
the terminal points lie in a near-horizontal plane. This can be applied to certain current
industry problems.
Theorem 3.1 provides the discounted cost for constructing a decline of length l metres.
Typical units for development rate D, cost rate C and discount rate d are m p.a., $/m
and % p.a. respectively, and are assumed to be given. The parameters r = 1 + d, Vc =
CD/ ln r, k = V1 ln r/(V2 ln r + CD) are used throughout this chapter.
Theorem 3.1. The discounted cost of constructing a decline link of length l is expressed as,
Discounted construction cost of the decline link = Vc(1− r−l/D)
Proof. The time taken to construct a portion of the decline link of length x is x/D. There-
fore, the discount factor is (1 + d)−x/D. The discounted cost of developing the decline
link can be written,
Discounted construction cost of the decline link =∫ l
0C(1 + d)−x/Ddx
=CDln r
(1− r−l/D)
= Vc(1− r−l/D)

3.3 Optimally locating a single discounted Steiner point for one development face 35
3.3 Optimally locating a single discounted Steiner point for onedevelopment face
In this section the objective function is derived to locate a single discounted Steiner point
where a single development face is being operated in the mine. The cash flows from the
decline construction and ore production are written in terms of the parameters l0, l1, l2,
V1, V2, C, D, d. Then, the total NPV is expressed in terms of these parameters. Next,
the problem is formulated as an optimisation problem. Finally, an iterative approach is
introduced to solve this optimisation problem.
The NPV is defined by the cash flows generated from the resource extraction and
construction costs of the access network. Since the construction is a cost, cash flows
generated from access construction have a negative value. Finally, the NPV is the sum of
all the cash flows. The other fixed costs are not considered in this model. The distances
l0, l1, l2 are the construction lengths from p0, p1, p2 to s respectively, which are given by
Euclidean distances.
Lemma 3.1. In a simple discounted Steiner network, the cash flows generated from access con-
struction with one development face are given by NPVcon where,
NPVcon = Vc(r−(l0+l1+l2)/D − 1) (3.1)
Proof. In order to construct the entire network, the decline links p0s, sp1, sp2 need to be
constructed. Therefore, the discounted costs for constructing the entire network are,
Construction costs for the entire network =∫ l0+l1+l2
0C(1 + d)−x/Ddx
=CDln r
(1− r−(l0+l1+l2)/D)
The cash flows generated from the access construction are the negative of the above and
are given by NPVcon where,
NPVcon = Vc(r−(l0+l1+l2)/D − 1)

36 Optimally locating a single discounted Steiner point without a gradient constraint
Lemma 3.2. In a simple discounted Steiner network, the cash flows generated from resource
extraction with one development face are given by NPVext where,
NPVext = V1r−(l0+l1)/D + V2r−(l0+l1+l2)/D (3.2)
Proof. The resource (ore) at the point p1 is extracted before p2 since the decline link sp1
is constructed before the decline link sp2. Therefore, the total times taken to reach the
points p1 and p2 are t0 + t1 and t0 + t1 + t2 respectively, where t0 = l0/D, t1 = l1/D,
t2 = l2/D. The NPV generated from the ore extraction is expressed as NPVext where,
NPVext = V1r−(t0+t1) + V2r−(t0+t1+t2) (3.3)
Substituting the expressions for t0, t1, t2 into (3.3) gives the result.
The Net Present Value is defined by the cash flows generated from the ore production
and construction costs of the access network. Finally, the NPV is the sum of both the cash
flows.
Theorem 3.2. In a simple discounted Steiner network with one face being developed at a time,
the NPV is given by,
NPV = V1r−(l0+l1)/D + (V2 + Vc)r−(l0+l1+l2)/D −Vc (3.4)
Proof. The cash flows generated from resource extraction and access construction are con-
sidered because these costs directly depend on the location of the discounted Steiner
point. Therefore, the total NPV is expressed as,
NPV = NPVext + NPVcon (3.5)
Substituting the expressions from (3.1), (3.2) into (3.5) gives the result.
Equation (3.4) is the objective function for the problem of optimally locating the dis-

3.3 Optimally locating a single discounted Steiner point for one development face 37
counted Steiner point. Therefore, this research problem can be expressed as the following
optimisation problem:
maximise V1r−(l0+l1)/D + (V2 + Vc)r−(l0+l1+l2)/D −Vc
such that l0, l1, l2 ≥ 0
where V1, V2, Vc, D, r are constants.
The decision variables are l0, l1, l2 and they are functions of the coordinates of the
discounted Steiner point, x, y, z. There will be additional constraints on l0, l1, l2 that are
imposed by the geometry of the network. Later, such a constraint is obtained and is given
by (3.19).
A maximum always exists since the NPV is bounded above by V1 + V2. It is obvious
that, if the discounted Steiner point is not on the plane defined by the three vertices,
then the NPV can be increased by moving the discounted Steiner point towards and
perpendicular to the plane, since this decreases l0, l1 and l2. Therefore, the discounted
Steiner point always lies in the interior or on the boundary of the triangle given by the
three vertices p0, p1 and p2.
The objective function is differentiable on the problem domain with respect to x, y, z
except at p0, p1, p2 since these points are degenerate Steiner points. These cases will be
discussed further in Section 3.3.1.
The problem is a non-convex problem, therefore, methods that assume convexity can-
not be used. The optimal point which gives the maximum NPV is found by differentiat-
ing the objective function and setting this equal to zero.
∂NPV∂x
=−V1 ln r
Dr−(l0+l1)/D
(∂l0∂x
+∂l1∂x
)−(
V2 ln rD
+ C)
r−(l0+l1+l2)/D(
∂l0∂x
+∂l1∂x
+∂l2∂x
)= 0

38 Optimally locating a single discounted Steiner point without a gradient constraint
Therefore,
V1 ln rD
(∂l0∂x
+∂l1∂x
)+
(V2 ln r
D+ C
)r−l2/D
(∂l0∂x
+∂l1∂x
+∂l2∂x
)= 0
Similarly, differentiating the objective function with respect to y, z and setting them equal
to 0 yields,
V1 ln rD
(∂l0∂y
+∂l1∂y
)+
(V2 ln r
D+ C
)r−l2/D
(∂l0∂y
+∂l1∂y
+∂l2∂y
)= 0
V1 ln rD
(∂l0∂z
+∂l1∂z
)+
(V2 ln r
D+ C
)r−l2/D
(∂l0∂z
+∂l1∂z
+∂l2∂z
)= 0
Rewriting the equations above,
(A + B)(
∂l0∂x
+∂l1∂x
)+ B
∂l2∂x
= 0 (3.6)
(A + B)(
∂l0∂y
+∂l1∂y
)+ B
∂l2∂y
= 0 (3.7)
(A + B)(
∂l0∂z
+∂l1∂z
)+ B
∂l2∂z
= 0 (3.8)
where A = V1 ln r/D and B = (V2 ln r/D + C)r−l2/D
Equations (3.6), (3.7), (3.8) can be expressed in terms of gradients,
(A + B)∇(l0 + l1) + B∇l2 = 0 (3.9)
Note that (3.9) is valid for any metric. Next, an important property of the angles at
the discounted Steiner point in a simple discounted Steiner network is developed and is
expressed in Theorem 3.3.
Theorem 3.3. If the discounted Steiner point does not coincide with p0, p1 or p2, then the paths
from the discounted Steiner point to p0 and p1 make equal angles with the path from the discounted
Steiner point to p2 and that angle θ is expressed as,
cos θ = − 12(krl2/D + 1)
(3.10)

3.3 Optimally locating a single discounted Steiner point for one development face 39
where k = V1 ln r/(V2 ln r + CD)
Proof. Let u0, u1, u2 be the unit vectors which are directed from the fixed points p0, p1, p2
respectively, towards the discounted Steiner point. Let θ be the angle between u1 and u2
and θ′ be the angle between u0 and u2 as shown in Fig. 3.3. The unit vectors are expressed
as the gradients u0 = ∇l0, u1 = ∇l1, u2 = ∇l2.
Figure 3.3: Vector representation of the problem
By substituting the values of ∇l0,∇l1, ∇l2 into (3.9),
(A + B)(u0 + u1) + Bu2 = 0 (3.11)
By taking the dot product of (3.11) with u0 − u1,
(A + B)(u0 + u1).(u0 − u1) + Bu2.(u0 − u1) = 0
Since (u0 + u1).(u0 − u1) = |u0|2 − |u1|2 = 1− 1 = 0, the expression above reduces to,
u2.u0 =u2.u1
|u2||u0| cos θ =|u2||u1| cos θ′
cos θ = cos θ′
θ =θ′
Hence the two angles θ, θ′ are equal.

40 Optimally locating a single discounted Steiner point without a gradient constraint
By taking the dot product of (3.11) with u2,
(A + B)(u0 + u1).u2 + Bu2.u2 = 0 (3.12)
Since u0.u2 = u1.u2 = cos θ and u2.u2 = 1, by substituting these values into (3.12),
2(A + B) cos θ + B = 0
cos θ = − 12(A/B + 1)
= − 12(krl2/D + 1)
Equation (3.10) is called the discount equation since l2 and θ depend on the constants V1,
V2, C, D, d that define the discounting. Lemmas 3.3 and 3.4 provide the upper and lower
bounds of the angle θ which are defined for zero and infinite discount rates respectively.
Lemma 3.3. If the operating discount rate is zero, then the discounted Steiner point coincides
with the classical Steiner point.
Proof. If d = 0, then r = 1 and k = 0. Substituting the values of r and k into (3.10),
cos θ = − 12(krl2/D + 1)
= −1/2
θ = 2π/3
which corresponds to the classical Steiner position and this angle is the upper bound for
the angle θ.
Lemma 3.4. For the limiting case of an infinite discount rate the discounted Steiner point is at the
intersection of the line connecting p0 and p1 and the line perpendicular to it and passing through
p2.
Proof. If d→ ∞, then r → ∞. By substituting the limiting value of r into (3.10),
limr→∞
cos θ = limr→∞− 1
2(krl2/D + 1)= 0
limr→∞
θ = π/2

3.3 Optimally locating a single discounted Steiner point for one development face 41
Hence, π/2 is the lower bound of angle θ.
Corollary 3.1. For any discount rate between 0 and ∞, the range of an optimal θ is π/2 < θ <
2π/3.
Proof. Corollary 3.1 follows from Lemmas 3.3 and 3.4.
Corollary 3.2. If the operating discount rate is zero, then the problem of maximising the NPV
is reduced to minimising the total length l0 + l1 + l2 and the discounted Steiner point coincides
with its classical location.
Proof. By expanding the objective function in (3.4),
NPV = V1r−(l0+l1)/D + V2r−(l0+l1+l2)/D +CDln r
(r−(l0+l1+l2)/D − 1) (3.13)
If d = 0, then r = 1 so the first two terms reduce to V1 + V2 and the third term is an
indeterminate form as r approaches 1. Therefore, by using l’Hopital’s rule for the third
term,
limr→1
CDln r
(r−(l0+l1+l2)/D − 1) = −C(l0 + l1 + l2)
By substituting the values above into (3.13), the new NPV function becomes NPV(d=0)
where,
NPV(d=0) = V1 + V2 − C(l0 + l1 + l2)
which implies,
max [V1 + V2 − C(l0 + l1 + l2)] ≡ min [C(l0 + l1 + l2)−V1 −V2]
Therefore, the problem is reduced to a length minimisation problem when the operating
discount rate is zero and the solution is indeed the classical Steiner point.
So far, one equation (Eq. 3.10) has been developed in terms of θ and l2 using the objec-
tive function. Now, θ and l2 will be related geometrically to generate another equation.
Eventually, two equations will be obtained in terms of θ and l2.

42 Optimally locating a single discounted Steiner point without a gradient constraint
Figure 3.4: The geometric parameters of the problem
Let γ0 = ∠sp0 p2, γ1 = ∠sp1 p2, ν = ∠p0 p2 p1 as shown in Fig. 3.4. Let the distances
d0, d1, d2 be the Euclidean distances where,
d0 =√(x0 − x2)2 + (y0 − y2)2 + (z0 − z2)2 (3.14)
d1 =√(x1 − x2)2 + (y1 − y2)2 + (z1 − z2)2 (3.15)
d2 =√(x0 − x1)2 + (y0 − y1)2 + (z0 − z1)2 (3.16)
By applying the cosine rule to the triangle p0 p2 p1,
ν = arccos(
d20 + d2
1 − d22
2d0d1
)(3.17)
By applying the sine rule to the triangle p0 p2s,
d0
sin θ=
l2sin γ0
Therefore,
sin γ0 =l2 sin θ
d0
Similarly, by applying the sine rule to the triangle p1 p2s,
sin γ1 =l2 sin θ
d1

3.3 Optimally locating a single discounted Steiner point for one development face 43
Summing the angles in the quadrilateral p0 p2 p1s yields:
γ0 + ν + γ1 + 2θ = 2π
Therefore,
cos(2θ + ν) = cos(2π − γ0 − γ1)
cos(2θ + ν) = cos γ0 cos γ1 − sin γ0 sin γ1
cos(2θ + ν) =
√(d2
0 − l22 sin2 θ)(d2
1 − l22 sin2 θ)− l2
2 sin2 θ
d0d1
Rewriting the equation above,
d0d1 cos(2θ + ν) =√(d2
0 − l22 sin2 θ)(d2
1 − l22 sin2 θ)− l2
2 sin2 θ
d0d1 cos(2θ + ν) + l22 sin2 θ =
√(d2
0 − l22 sin2 θ)(d2
1 − l22 sin2 θ) (3.18)
Squaring both sides in (3.18),
[d0d1 cos(2θ + ν) + l22 sin2 θ]2 = (d2
0 − l22 sin2 θ)(d2
1 − l22 sin2 θ)
l22 =
d20d2
1[1− cos2(2θ + ν)]
sin2 θ(d20 + d2
1 + 2 cos(2θ + ν)d0d1)
Therefore,
l2 =d0d1| sin(2θ + ν)|
sin θ√
d20 + d2
1 + 2 cos(2θ + ν)d0d1
(3.19)
since sin(2θ + ψ) < 0.
Equation (3.19) is called the geometric equation since l2 and θ depend on the constants
d0, d1, ν that define the geometry of the network.
3.3.1 Discounted Steiner point degenerate cases
Next, the degenerate cases where the discounted Steiner point coincides with one of the
vertices p0, p1 or p2 are considered. Equation (3.10) is used to calculate some special

44 Optimally locating a single discounted Steiner point without a gradient constraint
angles for which the discounted Steiner point is located at p0, p1, p2. These angles are
called critical angles. For each vertex the critical angle is the minimum angle for which the
discounted Steiner point coincides with the vertex. The critical angle determines whether
the discounted Steiner point lies at p0, p1 or p2.
Figure 3.5: The discounted Steiner point degenerate cases
Let λ, µ, ν be the angles ∠p1 p0 p2, ∠p0 p1 p2 and ∠p1 p2 p0 respectively. By applying the
cosine rule to the triangle p0 p1 p2 in Fig. 3.5,
λ = arccos(
d20 + d2
2 − d21
2d0d2
)(3.20)
µ = arccos(
d21 + d2
2 − d20
2d1d2
)(3.21)
By substituting the values of d0, d1, d2 into (3.17), (3.20), (3.21) the angles λ, µ, ν, can be
found respectively.
Let ϕ, ω, ψ be the critical angles for which the discounted Steiner point lies at p0, p1,
p2 respectively, as shown in Fig. 3.5. The discounted Steiner point coincides with a vertex
if the angle at the vertex is greater than or equal to the critical angle.
Lemma 3.5. If λ ≥ ϕ, then the discounted Steiner point coincides with p0 and
(I) the critical angle ϕ is given by,
ϕ = arccos(
−12(krd0/D + 1)
)(3.22)

3.3 Optimally locating a single discounted Steiner point for one development face 45
(II) the maximum NPV is given by NPV(s=p0) where,
NPV(s=p0) = V1r−d2/D + (V2 + Vc)r−(d0+d2)/D −Vc (3.23)
Proof. The conditions that need to be satisfied so that the discounted Steiner point is
located at the point p0 are l2 = d0 and θ = ϕ. By substituting these values into (3.10),
cos ϕ =−1
2(krd0/D + 1)
ϕ = arccos(
−12(krd0/D + 1)
)
Therefore, if λ ≥ ϕ the discounted Steiner point lies at point p0. Similarly, when the
discounted Steiner point is at p0, l0 = 0, l1 = d2 and l2 = d0. Substituting these values
into (3.4) the resultant NPV can be obtained.
Equation (3.22) can be verified for a special case where, if d = 0, then r = 1 and k = 0.
By substituting the value of k into (3.22),
ϕ = arccos−12
=2π
3
Lemma 3.6. If µ ≥ ω, then the discounted Steiner point coincides with p1 and
(I) the critical angle ω is given by,
ω = arccos(
−12(krd1/D + 1)
)(3.24)
(II) the maximum NPV is given by NPV(s=p1) where,
NPV(s=p1) = V1r−d2/D + (V2 + Vc)r−(d1+d2)/D −Vc (3.25)
Proof. The conditions that need to be satisfied so that the discounted Steiner point is

46 Optimally locating a single discounted Steiner point without a gradient constraint
located at p1 are l2 = d1 and θ = ω. By substituting these values into (3.10),
cos ω =−1
2(krd1/D + 1)
ω = arccos(
−12(krd1/D + 1)
)
Hence, if µ ≥ ω the discounted Steiner point lies at the point p1. When the discounted
Steiner point is at p1, l0 = d2, l1 = 0 and l2 = d1. Substituting these values into (3.4) gives
the resultant NPV.
Equation (3.24) can be verified as before for the classical Steiner network case. If d = 0,
then r = 1 and k = 0. By substituting the value of k into (3.24),
ω = arccos−12
=2π
3
Lemma 3.7. If ν ≥ ψ, then the discounted Steiner point coincides with p2 and
(I) the critical angle ψ is given by,
ψ = 2 arccos(
12(k + 1)
)(3.26)
(II) the maximum NPV is given by NPV(s=p2) where,
NPV(s=p2) = (V1 + V2 + Vc)r−(d0+d1)/D −Vc (3.27)
Proof. The conditions that need to be satisfied so that the discounted Steiner point is
located at p2 are l2 = 0 and 2π − 2θ = ψ. By substituting these values into (3.10),
cos(
π − ψ
2
)= − 1
2(k + 1)
ψ = 2 arccos(
12(k + 1)
)
Therefore, if ν ≥ ψ the discounted Steiner point coincides with the point p2. When the
discounted Steiner point is at p2, l0 = d0, l1 = d1 and l2 = 0. Substituting these values

3.3 Optimally locating a single discounted Steiner point for one development face 47
into (3.4) gives the resultant NPV.
Equation (3.26) can be verified for a special case where, if d = 0, then r = 1 and k = 0
so ψ should be 2π/3 as for the classical Steiner network. By substituting the value of k
into (3.26),
ψ = 2 arccos12=
2π
3
By substituting the expression k = V1 ln r/(V2 ln r + CD) into (3.26),
ψ = 2 arccos(
V2 ln r + CD2(V1 ln r + V2 ln r + CD)
)
Note that V1 ln r > 0. Therefore, ψ ≥ 2π/3 in general which implies that ϕ, ω ≤ 2π/3.
When finding the positions of the discounted Steiner point s, for a particular given
example, first ψ, ω, ϕ should be calculated and compared with the angles λ, µ, ν. If one
of the inequalities ν ≥ ψ, µ ≥ ω or λ ≥ ϕ is satisfied, then the optimal location of s will
be at one of the vertices.
3.3.2 1-Face Discounted Steiner Point Algorithm
In the previous section, the discount equation (3.10) and the geometric equation (3.19)
were developed in terms of θ and l2. These equations are not linear. An iterative process
is proposed to find the optimal values for θ and l2. If these two parameters are known, the
coordinates of the discounted Steiner point can be calculated by solving three quadratic
simultaneous equations.
The 1-Face Discounted Steiner Point Algorithm (1FDSPA) is a fixed point iteration
algorithm which solves for θ. It seeks the solution by an iterative process such that θn+1 =
f (θn) starting from some initial value θ0.
Let θ, l2 be the optimal values obtained from the iterative process. Then, the distances
l0, l1 are calculated by applying the sine rule to the triangles p0sp2, p1sp2 in Fig. 3.4.
l0 =d0 sin(θ + γ0)
sin θ(3.28)
l1 =d1 sin(θ + γ1)
sin θ(3.29)

48 Optimally locating a single discounted Steiner point without a gradient constraint
Algorithm 3.1: 1-Face Discounted Steiner Point Algorithm (1FDSPA)Input: V1, V2, C, D, d and locations of p0, p1, p2, εOutput: The optimal location of the discounted Steiner point and the optimal NPV.
1 Calculate d0, d1, d2 and then ν, λ, µ, ϕ, ω ψ using (3.17), (3.20), (3.21), (3.22), (3.24),(3.26) respectively.
2 if λ ≥ ϕ then3 the discounted Steiner point coincides with p0 and NPV is given by (3.23).
4 else if µ ≥ ω then5 the discounted Steiner point coincides with p1 and NPV is given by (3.25).
6 else if ν ≥ ψ then7 the discounted Steiner point coincides with p2 and NPV is given by (3.27).
8 else9 Initialisation: θ(0) = 2π/3
10 i = 011 repeat12 Compute l2
l2(i + 1) =d0d1| sin(2θ(i) + ν)|
sin θ(i)√
d20 + d2
1 + 2 cos(2θ(i) + ν)d0d1
Update θ
θ(i + 1) = arccos(− 1
2(krl2(i+1)/D + 1)
)13 i = i + 114 until |θ(i)− θ(i− 1)| < ε15 Calculate l0 and l1 using (3.28), (3.29) respectively.16 The optimal NPV is given by (3.30).17 The optimal location of the discounted Steiner point is calculated using (3.31),
(3.32), (3.33).
The maximum NPV is expressed as NPV∗ where,
NPV∗ = V1r−(l0+l1)/D + (V2 + Vc)r−(l0+l1+l2)/D −Vc (3.30)
Since the distances l0, l1, l2 are known, the coordinates of the discounted Steiner point
x, y, z can be calculated by solving three quadratic simultaneous Equations (3.31), (3.32),
(3.33).
l20 = (x0 − x)2 + (y0 − y)2 + (z0 − z)2 (3.31)

3.3 Optimally locating a single discounted Steiner point for one development face 49
l21 = (x− x1)
2 + (y− y1)2 + (z− z1)
2 (3.32)
l22 = (x− x2)
2 + (y− y2)2 + (z− z2)
2 (3.33)
The iterative process converges to the optimal solution very quickly and the conver-
gence is independent of the initial value of θ. The convergence of this algorithm and the
uniqueness of the discounted Steiner point are presented in [51]. The sufficient condition
that needs to be satisfied to have a unique discounted Steiner point and for the algorithm
to converge is given in [51] which is
√d0d1 <
5.8Dln r
The left side of the inequality is the geometric mean of the distances from the portal and
the first ore body to the second ore body. At a typical construction rate of 2000m p.a.
and with a discount rate of 10 % p.a., D/ ln r would be more than 20000m and so the
inequality is easily satisfied in practice.
Geometric construction to locate the discounted Steiner point
Another method is introduced to locate the discounted Steiner point geometrically for a
given optimal value of θ, which is obtained from the 1FDSPA. Algorithm 3.2 is proposed
to construct the optimal location of the discounted Steiner point geometrically.
Algorithm 3.2: Geometric construction of the discounted Steiner pointInput: The plane γ containing p0, p1, p2 and the optimal value of θ.Output: The optimal location of the discounted Steiner point.
1 Construct the triangle4p0c0 p2 ⊂ γ such that the point c0 is exterior to4p0 p1 p2and ∠c0 p0 p2 = ∠c0 p2 p0 = θ − π/2.
2 Construct the circle C ⊂ γ with centre c0 and radius |c0 p0| = |c0 p2|.3 Construct the triangle4p1c1 p2 ⊂ γ such that the point c1 is exterior to4p0 p1 p2
and ∠c1 p1 p2 = ∠c1 p2 p1 = θ − π/2.4 Construct the circle C′ ⊂ γ with centre c1 and radius |c1 p1| = |c1 p2|.5 The intersection of C and C′ gives the location of the discounted Steiner point.
Proof. The angles are chosen such that ∠c0 p0 p2 = ∠c0 p2 p0 = θ − π/2 as shown in Fig.
3.6, so ∠p0c0 p2 = 2π − 2θ which yields ∠p0sp2 = θ because it is the inscribed angle.

50 Optimally locating a single discounted Steiner point without a gradient constraint
Figure 3.6: Geometric construction of the discounted Steiner point
Similarly, ∠p1c1 p2 = 2π − 2θ, therefore ∠p1sp2 = θ which is again the inscribed angle.
3.4 Optimally locating a single discounted Steiner point for twodevelopment faces
In this section, the discounted Steiner point is located for an underground mine being
operated with two development faces given that there is enough mining equipment to
facilitate this and hence the idle time of the mining equipment can be reduced. The total
NPV is expressed as the sum of development and production cash flows. The objective
function is different from the previous one, because with two development faces, there is
the option of constructing two decline links at a time. The problem is formulated as an
optimisation problem. Finally, an iterative approach is proposed to solve the problem.
Lemma 3.8. In a simple discounted Steiner network, the cash flows generated from access con-
struction with two development faces are given by NPVdev where,
NPVdev = Vc[r−(l0+l1)/D + r−(l0+l2)/D − r−l0/D − 1] (3.34)
Proof. The discounted cost for constructing each decline link is expressed using Theo-

3.4 Optimally locating a single discounted Steiner point for two development faces 51
rem 3.1 with an appropriate time discount factor. These discounted costs for constructing
the decline links are,
Cost of the decline link p0s =∫ l0
0Cr−x/Ddx = Vc(1− r−l0/D)
Cost of the decline link sp1 = r−l0/D∫ l1
0Cr−x/Ddx = Vcr−l0/D(1− r−l1/D)
Cost of the decline link sp2 = r−l0/D∫ l2
0Cr−x/Ddx = Vcr−l0/D(1− r−l2/D)
The cash flows generated from the access construction are the sum of all the negative
discounted costs above and given by NPVdev where,
NPVdev = Vc[(r−l0/D − 1) + r−l0/D(r−l1/D − 1) + r−l0/D(r−l2/D − 1)]
By simplifying above equation,
NPVdev = Vc[r−(l0+l1)/D + r−(l0+l2)/D − r−l0/D − 1]
Lemma 3.9. In a simple discounted Steiner network, the cash flows generated from ore production
with two development faces are given by NPVpro where,
NPVpro = V1r−(l0+l1)/D + V2r−(l0+l2)/D (3.35)
Proof. The total construction times taken to reach p1, p2 are t0 + t1, t0 + t2 respectively,
where t0 = l0/D, t1 = l1/D and t2 = l2/D. Therefore, NPV for ore production is written
as,
NPVpro = V1r−(t0+t1) + V2r−(t0+t2) = V1r−(l0+l1)/D + V2r−(l0+l2)/D
Theorem 3.4. In a simple discounted Steiner network where two faces are being developed, the

52 Optimally locating a single discounted Steiner point without a gradient constraint
NPV is given by,
NPV = (V1 + Vc)r−(l0+l1)/D + (V2 + Vc)r−(l0+l2)/D −Vc(r−l0/D + 1) (3.36)
Proof. The total NPV is derived as the combination of both the NPVs given in (3.34) and
(3.35). Hence,
NPV = NPVpro + NPVdev
NPV = V1r−(l0+l1)/D + V2r−(l0+l2)/D + Vc[r−(l0+l1)/D + r−(l0+l2)/D − r−l0/D − 1]
= (V1 + Vc)r−(l0+l1)/D + (V2 + Vc)r−(l0+l2)/D −Vc(r−l0/D + 1)
The objective function is given by (3.36) when the underground mine is being op-
erated with two development faces. Now, the problem is expressed as an optimisation
problem.
maximise (V1 + Vc)r−(l0+l1)/D + (V2 + Vc)r−(l0+l2)/D −Vc(r−l0/D + 1)
such that l0, l1, l2 ≥ 0
The objective function is differentiable in the problem domain with respect to x, y, z
except at the points p0, p1, p2. The distances l0, l1, l2 are functions of the coordinates of
the discounted Steiner point x, y, z. A maximum exists as the NPV is bounded above by
V1 + V2. The feasible region for the discounted Steiner point is the interior of the triangle
including the boundary which is defined by the points p0, p1, p2. There will be additional
constraints on l1, l2 which are discussed later in this section.
To maximise the NPV, differentiate (3.36) with respect to x and set equal to 0;
∂NPV∂x
=− (V1 + Vc)ln rD
r−(l0+l1)/D(
∂l0∂x
+∂l1∂x
)− (V2 + Vc)
ln rD
r−(l0+l2)/D(
∂l0∂x
+∂l2∂x
)+ Cr−l0/D ∂l0
∂x= 0

3.4 Optimally locating a single discounted Steiner point for two development faces 53
[(V1 ln r
D+ C
)r−l1/D +
(V2 ln r
D+ C
)r−l2/D − C
]∂l0∂x
+
(V1 ln r
D+ C
)r−l1/D ∂l1
∂x
+
(V2 ln r
D+ C
)r−l2/D ∂l2
∂x= 0
(A + B− C)∂l0∂x
+ A∂l1∂x
+ B∂l2∂x
= 0 (3.37)
where,
A =
(V1 ln r
D+ C
)r−l1/D (3.38)
B =
(V2 ln r
D+ C
)r−l2/D (3.39)
Similarly, differentiating (3.36) with respect to y, z and setting this equal to 0 yields;
(A + B− C)∂l0∂y
+ A∂l1∂y
+ B∂l2∂y
= 0 (3.40)
(A + B− C)∂l0∂z
+ A∂l1∂z
+ B∂l2∂z
= 0 (3.41)
Equations (3.37), (3.40), (3.41) can be expressed in terms of gradients,
(A + B− C)∇l0 + A∇l1 + B∇l2 = 0 (3.42)
Note that (3.42) is valid for any metric.
Lemma 3.10. If the operating discount rate is zero then the corresponding Steiner point is mapped
to its classical position.
Proof. When d = 0, r = 1 and so,
A = limr→1
(V1 ln r
D+ C
)r−l1/D = C (3.43)
B = limr→1
(V2 ln r
D+ C
)r−l2/D = C (3.44)
Therefore, A = B = C. By substituting this into (3.42),
(A + A− A)∇l0 + A∇l1 + A∇l2 = 0

54 Optimally locating a single discounted Steiner point without a gradient constraint
∇(l0 + l1 + l2) = 0 (3.45)
The solution for (3.45) is indeed the classical Steiner point.
Figure 3.7: Vector representation
Let u0, u1, u2 be the unit vectors directed from the fixed points p0, p1, p2 towards
the Steiner point as shown in Fig. 3.7. Let θ0, θ1, θ2 be the angles between u0 and u1, u1
and u2, u2 and u0 respectively. The unit vectors are expressed using the corresponding
gradients u0 = ∇l0, u1 = ∇l1, u2 = ∇l2. The angles θ1 and θ2 are defined in terms of A, B
and C.
Hence, (3.42) becomes,
(A + B− C)u0 + Au1 + Bu2 = 0 (3.46)
Equation (3.46) can be rewritten,
A(u0 + u1) + B(u0 + u2)− Cu0 = 0 (3.47)
Also note that u0.u1 = cos θ0, u1.u2 = cos θ1, u2.u0 = cos θ2 and since this is a planar
problem, θ0 + θ1 + θ2 = 2π and so θ0 = 2π − (θ1 + θ2).
By taking the dot product of (3.46) with u0,
(A + B− C)u0.u0 + Au1.u0 + Bu2.u0 = 0
A cos θ0 + B cos θ2 = C− A− B
A cos(2π − (θ1 + θ2)) + B cos θ2 = C− A− B

3.4 Optimally locating a single discounted Steiner point for two development faces 55
cos(θ1 + θ2) =C− A− B− B cos θ2
A(3.48)
By taking the dot product of (3.47) with u0 − u1,
A(u0 + u1).(u0 − u1) + B(u0 + u2).(u0 − u1)− Cu0.(u0 − u1) = 0 (3.49)
Note that (u0 + u1).(u0 − u1) = |u0|2 − |u1|2 = 1− 1 = 0.
By substituting the result above into (3.49),
B(u0 + u2).(u0 − u1)− Cu0.(u0 − u1) = 0
B(1− u0.u1 + u2.u0 − u2.u1)− C + Cu0.u1 = 0
B(1− cos θ0 + cos θ2 − cos θ1)− C + C cos θ0 = 0
(C− B) cos(θ1 + θ2) + B cos θ2 − B cos θ1 = C− B (3.50)
By substituting the value of cos(θ1 + θ2) into (3.50),
(C− B)(
C− A− B− B cos θ2
A
)+ B cos θ2 − B cos θ1 = C− B
cos θ2(B2 − BC + AB)− AB cos θ1 = A(C− B)− (C− B)(C− A− B)
B cos θ2(B− C + A)− AB cos θ1 = (C− B)(2A + B− C) (3.51)
Similarly, by taking the dot product of (3.47) with u0 − u2,
A(u0 + u1).(u0 − u2) + B(u0 + u2).(u0 − u2)− Cu0.(u0 − u2) = 0 (3.52)
Note that (u0 − u2).(u0 + u2) = |u0|2 − |u2|2 = 1− 1 = 0.
By substituting the above into (3.52),
A(u0 + u1).(u0 − u2)− Cu0.(u0 − u2) = 0
(C− A) cos θ2 + A cos θ0 − A cos θ1 = C− A
A cos(θ1 + θ2)− A cos θ1 + (C− A) cos θ2 = C− A (3.53)

56 Optimally locating a single discounted Steiner point without a gradient constraint
By substituting the value of cos(θ1 + θ2) into (3.53),
A(
C− A− B− B cos θ2
A
)− A cos θ1 + (C− A) cos θ2 = C− A
cos θ2(C− A− B)− A cos θ1 = B (3.54)
Equation (3.54) is multiplied by B and the result is subtracted from (3.51),
B cos θ2(C− A− B)− B cos θ2(B− C + A) = B2 − (C− B)(2A + B− C)
B cos θ2(2C− 2A− 2B) = B2 − 2AC + 2AB− 2BC + C2 + B2
cos θ2 =2B2 + C2 + 2AB− 2AC− 2BC
2B(C− A− B)
cos θ2 =2B(B + A− C) + C2 − 2AC
2B(C− A− B)
cos θ2 = −1 +C(C− 2A)
2B(C− A− B)(3.55)
By substituting the value of cos θ2 into (3.54),
A cos θ1 = (C− A− B)(− 1 +
C(C− 2A)
2B(C− A− B)
)− B
A cos θ1 =C(C− 2A)
2B− B− C + A + B
cos θ1 =C2 − 2AC + 2AB− 2BC
2AB
cos θ1 = 1 +C(C− 2A− 2B)
2AB(3.56)
Equations (3.55), (3.56) are verified for the classical Steiner point as follows. If d = 0,
Equations (3.43), (3.44) imply A = B = C and so,
cos θ2 = −1 +A(A− 2A)
2A(A− A− A)= −0.5
θ2 = 2π/3
Hence, Equation (3.55) is correct in this case.

3.4 Optimally locating a single discounted Steiner point for two development faces 57
Similarly,
cos θ1 = 1 +A(A− 2A− 2A)
2AA= −0.5
θ1 = 2π/3
Hence, Equation (3.56) is correct in this case as well. Equations (3.55), (3.56) are called the
discount equations since θ1 and θ2 depend on the constants V1, V2, C, D, d that define the
discounting. These two discount equations are used below in the iterative algorithm to
find the discounted Steiner point.
Figure 3.8: The geometric parameters
Let γ0 = ∠sp0 p1, γ1 = ∠sp1 p2 as shown in Fig. 3.8.
By applying the Sine rule to the triangle p0sp2,
d0
sin θ2=
l2sin γ0
Therefore,
γ0 = arcsin(
l2 sin θ2
d0
)Similarly, by applying the Sine rule to the triangle p1sp2,
γ1 = arcsin(
l2 sin θ1
d1
)

58 Optimally locating a single discounted Steiner point without a gradient constraint
Also, by applying the Sine rule to the triangle p1sp2,
l1 =d1 sin(θ1 + γ1)
sin θ1(3.57)
Summing the angles in the quadrilateral p0 p2 p1s yields:
γ0 + ν + γ1 + θ1 + θ2 = 2π
Therefore,
cos(θ1 + θ2 + ν) = cos(2π − γ0 − γ1)
cos(θ1 + θ2 + ν) = cos γ0 cos γ1 − sin γ0 sin γ1 (3.58)
cos(θ1 + θ2 + ν) =
√(d2
0 − l22 sin2 θ2)(d2
1 − l22 sin2 θ1)− l2
2 sin θ2 sin θ1
d0d1(3.59)
Rewriting the equation above,
cos(θ1 + θ2 + ν)d0d1 =√(d2
0 − l22 sin2 θ2)(d2
1 − l22 sin2 θ1)− l2
2 sin θ2 sin θ1
cos(θ1 + θ2 + ν)d0d1 + l22 sin θ2 sin θ1 =
√(d2
0 − l22 sin2 θ2)(d2
1 − l22 sin2 θ1) (3.60)
Squaring both sides in (3.60),
(cos(θ1 + θ2 + ψ)d0d1 + l22 sin θ2 sin θ1)
2 = (d20 − l2
2 sin2 θ2)(d21 − l2
2 sin2 θ1)
l22 =
d20d2
1 sin2(θ1 + θ2 + ν)
d20 sin2 θ1 + d2
1 sin2 θ2 + 2 cos(θ1 + θ2 + ν) sin θ1 sin θ2d0d1
l2 =d0d1| sin(θ1 + θ2 + ν)|√
d20 sin2 θ1 + d2
1 sin2 θ2 + 2 cos(θ1 + θ2 + ν) sin θ1 sin θ2d0d1
(3.61)
Equations (3.57) and (3.61) are called the geometric equations since l1 and l2 depend on
the constants d0, d1, ν that define the geometry of the network. These two equations
are additional constraints on l1 and l2 in the optimisation problem and are used in the
iterative process for locating the discounted Steiner point.

3.4 Optimally locating a single discounted Steiner point for two development faces 59
3.4.1 Discounted Steiner point degenerate cases
The critical angles associated with the degenerate point are calculated using (3.55), (3.56),
(3.57), (3.61). The angles ν, λ and µ are calculated by solving (3.17), (3.20), (3.21) respec-
tively. However, now the critical angles ψ, ϕ, ω are of a different form from the previous.
Lemma 3.11. If λ ≥ ϕ, then the discounted Steiner point coincides with p0 and
(I) the critical angle ϕ is given by,
ϕ = arccos(
1 +CD(CD(1− 2r−d2/D − 2r−d0/D)− 2(V1 ln r + V2 ln r))
2(V1 ln r + CD)(V2 ln r + CD)r−(d2+d0)/D
)(3.62)
(II) the maximum NPV is given by NPV(s=p0) where,
NPV(s=p0) = (V1 + Vc)r−d2/D + (V2 + Vc)r−d0/D −Vc (3.63)
Proof. The conditions that need to be satisfied so that the discounted Steiner point is at
p0 are
l1 = d2, l2 = d0 and θ1 = ϕ.
By substituting these values into (3.38), (3.39), (3.56),
A =
(V1 ln r
D+ C
)r−d2/D (3.64)
B =
(V2 ln r
D+ C
)r−d0/D (3.65)
cos ϕ = 1 +C(C− 2A− 2B)
2AB(3.66)
By substituting the expressions for A, B into (3.66),
cos ϕ = 1 +C[
C− 2(
V1 ln rD + C
)r−d2/D − 2
(V2 ln r
D + C)
r−d0/D]
2(
V1 ln rD + C
)r−d2/D
(V2 ln r
D + C)
r−d0/D
cos ϕ = 1 +CD(
CD(1− 2r−d2/D − 2r−d0/D)− 2(V1 ln r + V2 ln r))
2(V1 ln r + CD)(V2 ln r + CD)r−(d2+d0)/D

60 Optimally locating a single discounted Steiner point without a gradient constraint
ϕ = arccos(
1 +CD(CD(1− 2r−d2/D − 2r−d0/D)− 2(V1 ln r + V2 ln r))
2(V1 ln r + CD)(V2 ln r + CD)r−(d2+d0)/D
)
The maximum NPV at this point is NPV(s=p0) where,
NPV(s=p0) = (V1 + Vc)r−d2/D + (V2 + Vc)r−d0/D −Vc
Equation (3.62) can be verified for a zero discount rate where r = 1. By substituting
the value of r into (3.62),
ϕ = arccos(
1 +CD(CD(1− 2− 2))
2CDCD
)= arccos
−12
=2π
3
Hence, Equation (3.62) is correct in this case.
Lemma 3.12. If µ ≥ ω, then the discounted Steiner point coincides with p1 and
(I) the critical angle ω is given by,
ω = arccos(− 1 +
CD(CD + 2V1 ln r)2(V2 ln r + CD)r−d1/D(V1 ln r + (V2 ln r + CD)r−d1/D)
)(3.67)
(II) the maximum NPV is given by NPV(s=p1) where,
NPV(s=p1) = (V1 + Vc)r−d2/D + (V2 + Vc)r−(d2+d1)/D −Vc(r−d2/D + 1) (3.68)
Proof. The conditions that need to be satisfied so that the discounted Steiner point is at
p1 are
l1 = 0, l2 = d1 and θ2 = ω.
By substituting these values into (3.38), (3.39), (3.55),
A =V1 ln r
D+ C (3.69)
B =
(V2 ln r
D+ C
)r−d1/D (3.70)
cos ω = −1 +C(C− 2A)
2B(C− A− B)(3.71)

3.4 Optimally locating a single discounted Steiner point for two development faces 61
By substituting the values of A, B into (3.71),
cos ω = −1 +CD(CD + 2V1 ln r)
2(V2 ln r + CD)r−d1/D(V1 ln r + (V2 ln r + CD)r−d1/D)
ω = arccos(− 1 +
CD(CD + 2V1 ln r)2(V2 ln r + CD)r−d1/D(V1 ln r + (V2 ln r + CD)r−d1/D)
)
The maximum NPV at this point is NPV(s=p1) where,
NPV(s=p1) = (V1 + Vc)r−d2/D + (V2 + Vc)r−(d2+d1)/D −Vc(r−d2/D + 1)
Equation (3.67) is verified for a zero discount rate as well. If d = 0 then r = 1. By
substituting the value of r into (3.67),
ω = arccos−12
=2π
3
Hence, Equation (3.67) is correct in this case.
Lemma 3.13. If ν ≥ ψ, then the discounted Steiner point coincides with p2 and
(I) the critical angle ψ is given by,
ψ = arccos((C− A− B)(4B(C− A) + C(C− 2A)) + C(C− A)(C− 2A)
2AB(C− A− B)
)(3.72)
(II) the maximum NPV is given by NPV(s=p2) where,
NPV(s=p2) = (V1 + Vc)r−(d0+d1)/D + (V2 + Vc)r−d0/D −Vc(r−(d0+d1)/D + 1) (3.73)
Proof. The conditions that need to be satisfied so that the discounted Steiner point is at
p2 are
l2 = 0, l1 = d1 and 2π − (θ1 + θ2) = ψ.
By substituting values of l2, l1 into (3.38), (3.39),
A =
(V1 ln r
D+ C
)r−d1/D (3.74)

62 Optimally locating a single discounted Steiner point without a gradient constraint
B =V2 ln r
D+ C (3.75)
First, the value of cos(θ1 + θ2) is calculated in terms of A, B, C. By substituting the
expressions for cos θ1 (Eq. 3.56), cos θ2 (Eq. 3.55) into (3.53),
A cos(θ1 + θ2)− A cos θ1 + (C− A) cos θ2 = C− A
A cos(θ1 + θ2)− A(
1 +C(C− 2A− 2B)
2AB
)+ (C− A)
(− 1 +
C(C− 2A)
2B(C− A− B)
)= C− A
A cos(θ1 + θ2)− A− C(C− 2A− 2B)2B
− C + A +C(C− A)(C− 2A)
2B(C− A− B)= C− A
cos(θ1 + θ2) =2B(2C− A)(C− A− B) + C(C− A− B)(C− 2A− 2B) + C(C− A)(C− 2A)
2AB(C− A− B)
cos(θ1 + θ2) =(C− A− B)(4BC− 4AB + C2 − 2AC) + C(C− A)(C− 2A)
2AB(C− A− B)
cos(θ1 + θ2) =(C− A− B)(4B(C− A) + C(C− 2A)) + C(C− A)(C− 2A)
2AB(C− A− B)
cos ψ =(C− A− B)(4B(C− A) + C(C− 2A)) + C(C− A)(C− 2A)
2AB(C− A− B)
ψ = arccos((C− A− B)(4B(C− A) + C(C− 2A)) + C(C− A)(C− 2A)
2AB(C− A− B)
)(3.76)
where A, B are given in (3.74), (3.75). The maximum NPV at this point is NPV(s=p2)
where,
NPV(s=p2) = (V1 + Vc)r−(d0+d1)/D + (V2 + Vc)r−d0/D −Vc(r−(d0+d1)/D + 1)
Equation (3.76) can be verified for a particular case. If d = 0 then A = B = C. By
substituting these values into (3.76),
ψ = arccos−12
=2π
3

3.5 Numerical trials 63
3.4.2 2-Face Discounted Steiner Point Algorithm
The 2-Face Discounted Steiner Point Algorithm (2FDSPA) is proposed to locate a single
discounted Steiner point given that two development faces are being constructed in the
underground mine. The two discount equations (3.55), (3.56) and two geometric equa-
tions (3.57), (3.61) are used in the iterative algorithm, to optimally locate the discounted
Steiner point. These four equations relate the unknown parameters l1, l2, θ1, θ2. Let l∗1 , l∗2 ,
θ∗1 , θ∗2 be the optimal values obtained from the 2FDSPA. The distance l∗0 is calculated by
applying the Sine rule to the triangle p0sp2 in Fig. 3.8.
l∗0 =d0 sin(θ∗2 + γ0)
sin θ∗2(3.77)
Therefore, the maximum NPV is calculated using (3.36) and is denoted by NPV∗ where,
NPV∗ = (V1 + Vc)r−(l∗0+l∗1 )/D + (V2 + Vc)r−(l
∗0+l∗2 )/D −Vc(r−l∗0 /D + 1) (3.78)
Since the distances l∗0 , l∗1 , l∗2 are known, the coordinates of the discounted Steiner point
(x, y, z) are obtained by solving three quadratic equations (3.79), (3.80), (3.81).
(l∗0 )2 = (x0 − x)2 + (y0 − y)2 + (z0 − z)2 (3.79)
(l∗1 )2 = (x− x1)
2 + (y− y1)2 + (z− z1)
2 (3.80)
(l∗2 )2 = (x− x2)
2 + (y− y2)2 + (z− z2)
2 (3.81)
3.5 Numerical trials
Numerical trials have been carried out to analyse the performance of the 1-face and 2-face
discounted Steiner point algorithms. These algorithms are applied to hypothetical data
and the improvement of the NPV is discussed. A sensitivity analysis is also conducted
when the mine is being operated with a single development face.

64 Optimally locating a single discounted Steiner point without a gradient constraint
Algorithm 3.3: 2-Face Discounted Steiner Point AlgorithmInput: V1, V2, C, D, d and locations of p0, p1, p2, εOutput: The optimal location of the discounted Steiner point and NPV
1 Calculate d0, d1, d2, µ, λ, ν, ϕ, ω, ψ and using (3.14), (3.15), (3.16), (3.17), (3.20),(3.21), (3.62), (3.67), (3.72) respectively.
2 if λ ≥ ϕ then3 the discounted Steiner point coincides with p0 and NPV is given in (3.63).
4 else if µ ≥ ω then5 the discounted Steiner point coincides with p1 and NPV is given in (3.68).
6 else if ν ≥ ψ then7 the discounted Steiner point coincides with p2 and NPV is given in (3.73).
8 else9 Initialisation: θ1(0) = 2π/3, θ2(0) = 2π/3, i = 0
10 repeat11 Compute l2 and l1:
l2(i + 1) =d0d1| sin(θ1(i) + θ2(i) + ν)|√
d20 sin2 θ1(i) + d2
1 sin2 θ2(i) + 2 cos(θ1(i) + θ2(i) + ν) sin θ1(i) sin θ2(i)d0d1
γ1(i + 1) = arcsin(
l2(i + 1) sin θ1(i)d1
)l1(i + 1) =
d1 sin(θ1(i) + γ1(i + 1))sin θ1(i)
Calculate the intermediate parameters A and B,
A(i + 1) =(
V1 ln rD
+ C)
r−l1(i+1)/D
B(i + 1) =(
V2 ln rD
+ C)
r−l2(i+1)/D
Update θ1 and θ2,
θ1(i + 1) = arccos(
1 +C(C− 2A(i)− 2B(i))
2A(i)B(i)
)
θ2(i + 1) = arccos(− 1 +
C(C− 2A(i))2B(i)(C− A(i)− B(i))
)12 i = i + 113 until |θ1(i)− θ1(i− 1)| < ε and |θ2(i)− θ2(i− 1)| < ε14 θ∗1 = θ1(i), θ∗2 = θ2(i), l∗1 = l1(i), l∗2 = l2(i)15 Calculate l0 using (3.77).16 The optimal NPV is given in (3.78).17 The optimal location of the discounted Steiner point is calculated using (3.79),
(3.80), (3.81).

3.5 Numerical trials 65
3.5.1 Performance analysis of the 1-Face Discounted Steiner Point Algorithm
The 1FDSPA is applied to the data-set below with a range of discount rates and the opti-
mal locations of the discounted Steiner point are obtained.
V1 = $60M , V2 = $40M, C = $6000/m, D = 1560 m p.a.
p0 = (200, 1200, 1000), p1 = (0, 0, 0), p2 = (1000, 1000, 0) metres.
d = 0, 5, 10, 20, 50, 100, ∞ % p.a.
Figure 3.9: The optimal locations of the discounted Steiner point for a range of discountrates with a single development face
Lemmas 3.3 and 3.4 have shown analytically for zero and infinite discount rates that
the corresponding optimal values of θ are 2π/3 and π/2 respectively. The results of the
trials in Table 3.1 confirm this. As shown in Fig. 3.9, the point p1 is accessed sooner for
a higher discount rate when the optimal location of the discounted Steiner point is used.
However, the distance from the discounted Steiner point to the point p2 increases. In
addition, when the discount rate is increased the NPV is reduced. For an infinite discount
rate, the optimal location of the discounted Steiner point is on the line p0 p1 which also

66 Optimally locating a single discounted Steiner point without a gradient constraint
Discount rate Optimal location of the θ l2 NPV% p.a. discounted Steiner point deg m $M
0 s0 = (319, 578, 259) 120 728 88.6605 s1 = (247, 514, 267) 113 798 84.618
10 s2 = (215, 482, 267) 110 828 80.99720 s3 = (184, 449, 265) 106 857 74.70050 s4 = (150, 409, 259) 103 888 60.875100 s4 = (128, 381, 253) 100 907 46.971∞ s4 = (38, 230, 192) 90 980 0
Table 3.1: Variation of the NPV for a range of discount rates in the single face operation
gives the minimum sum of the construction lengths for the decline links p0s, sp1.
The last column of Table 3.2 shows the improvement in the NPV when the 1FDSPA
is applied, compared with placing the discounted Steiner point at the classical position
(θ = 2π/3). As shown in Fig. 3.10, the 1FDSPA gives an improvement for all finite,
applicable discount rates and greater improvements as the discount increases.
Discount rate NPV with NPV without NPV improvement% p.a. 1FDSPA / $M 1FDSPA / $M $
5 84.618 84.569 490008 82.402 82.289 113000
10 80.997 80.838 15900012 79.645 79.439 20600015 77.708 77.431 27700020 74.700 74.307 393000
Table 3.2: NPV improvement for a range of discount rates when applying the 1FDSPA
The degenerate cases of the discounted Steiner point
The data-set below is used in the numerical trials to study the discounted Steiner point
degenerate cases.
Case 1:
V1 = $40M, V2= $20M, C = $6000/m, D = 3000 m p.a., d = 10 % p.a.
p0 = (600, 900, 300), p1 = (0, 0, 0), p2 = (1000, 1000, 0)
Case 2:
V1 = $80M, V2= $5M, C = $4500/m, D = 1500 m p.a., d = 10 % p.a.

3.5 Numerical trials 67
Figure 3.10: NPV improvement for a finite range of discount rates with the single devel-opment face
p0 = (0, 1000, 1000), p1 = (300, 600, 300), p2 = (0, 0, 0)
Case 3:
V1 = $40M, V2= $20M, C = $6000/m, D = 2000 m p.a., d = 10 % p.a.
p0 = (0, 1000, 1000), p1 = (1000, 1000, 0), p2 = (300, 800, 500)
Figs. 3.11a, 3.11b, 3.11c show the optimal locations of the discounted Steiner point for
Cases 1, 2 and 3 respectively. For these cases the discounted Steiner point coincides with
the points p0, p1 and p2.
3.5.2 Sensitivity analysis of the 1-face discounted Steiner point algorithm
This research problem is a physical network design problem for a mine and the access
for an underground mine is optimised to obtain the maximum NPV. The inputs in this
problem such as the development rate and the cost rate can be selected to obtain a better
NPV improvement. In the previous section, the variation of the discounted Steiner point
with the discount rate has been studied. In this subsection, how the development rate

68 Optimally locating a single discounted Steiner point without a gradient constraint
(a) Case 1
(b) Case 2 (c) Case 3
Figure 3.11: The degenerate cases of the discounted Steiner point
and the cost rate affect the NPV improvement are discussed. The NPV improvement is
measured by placing the discounted Steiner point at the classical location and comparing
the NPV with the 1FDSPA output for the two cases below.
Case 1: V1 = $100M, V2 = $50M, Case 2: V1 = $100M, V2 = $1M
p0 = (300, 3300, 3000), p1 = (0, 0, 0), p2 = (3000, 3000, 0).
Development rate
The optimal location of the discounted Steiner point depends on the development rate
because by varying it, the time taken to reach the ore deposits will be changed thus chang-
ing the NPV. Table 3.3 and Figure 3.12 show the improvement of the NPV for 10% p.a.
and 20% p.a. discount rates using 1FDSPA. At higher development rates the optimal lo-
cation of the discounted Steiner point is closer to the classical Steiner position. Therefore,
the improvement of the NPV is reduced.

3.5 Numerical trials 69
NPV improvement / %Case 1 Case 2
Development rate / m p.a. d = 20% d = 10% d = 20% d = 10%800 7.96 3.00 14.09 5.801000 5.64 2.16 10.37 4.251200 4.29 1.65 8.09 3.281500 3.09 1.19 5.96 2.362000 2.03 0.77 3.99 1.522500 1.46 0.54 2.89 1.073000 1.11 0.40 2.21 0.793640 0.83 0.29 1.64 0.57
Table 3.3: Variation of the NPV improvement for a range of development rates
Figure 3.12: Variation of the NPV improvement for a range of development rates
Cost rate
In this subsection how the cost rate of the declines affects the optimal location of the
discounted Steiner point is analysed. The development rate is fixed 1500 m p.a. and the
NPV improvements using 1FDSPA for the two cases above are investigated. Table 3.4
and Figure 3.13 show the variation of NPV improvement for the 10% p.a. and 20% p.a.
discount rates. Unlike the development rate, when the cost rate of the declines increases,
there is not a huge variation in the NPV improvement. Also for some cost rates, the NPV
improvement is almost a constant.

70 Optimally locating a single discounted Steiner point without a gradient constraint
NPV improvement %Case 1 Case 2
Cost rate / ($/m) d = 20% d = 10% d = 20% d = 10%500 2.76 1.29 4.80 2.411000 2.77 1.27 4.86 2.371500 2.79 1.26 4.92 2.342000 2.81 1.24 4.99 2.325000 3.00 1.19 5.63 2.317500 3.25 1.20 6.63 2.49
Table 3.4: Variation of the NPV improvement for a range of cost rates
Figure 3.13: Variation of the NPV improvement for a range of cost rates
3.5.3 Performance analysis of the 2-Face Discounted Steiner Point Algorithm
The 2FDSPA is applied for the same mine data-set which was used in Subsection 3.5.1.
Table 3.5 and Figure 3.14 show the optimal locations of the discounted Steiner point for a
range of discount rates. When the discount rate increases the construction of the last de-
cline link sp2 starts earlier. Also the construction lengths l1, l2 increase with the discount
rate. Consequently, the NPV is reduced.
Table 3.6 illustrates the improvement of the NPV applying the 2FDSPA. When the
2FDSPA is not applied, the Steiner point is placed at the classical Steiner point and the
NPVs are compared. Figure 3.15 shows that for a higher discount rate the 2FDSPA gives

3.5 Numerical trials 71
Figure 3.14: The optimal locations of the discounted Steiner point for a range of discountrates with two development faces
Discount Optimal location of the θ1 θ2 l1 l2 NPVrate % p.a. discounted Steiner point deg deg m m $M
0 s0 = (319, 578, 259) 120 120 411 728 87.6005 s1 = (294, 621, 327) 107 122 440 778 85.039
10 s2 = (282, 663, 381) 98 125 474 812 81.78920 s3 = (268, 731, 463) 87 129 535 865 76.13450 s4 = (248, 848, 600) 73 135 649 962 69.300100 s5 = (234, 926, 692) 66 138 730 1023 50.497≈ ∞ s5 = (200, 1200, 1000) 50 - 1019 1280 0
Table 3.5: Variation of the NPV for a range of discount rates with two development faces
higher NPV.

72 Optimally locating a single discounted Steiner point without a gradient constraint
Discount rate NPV with NPV without NPV improvement% p.a. 2FDSPA / $M 2FDSPA / $M $
5 85.039 85.003 360008 83.050 82.951 99000
10 81.789 81.643 14600012 80.576 80.375 20100015 78.837 78.552 28500020 76.134 75.706 428000
Table 3.6: Improvement of the NPV for finite discount rates with the two developmentfaces
Figure 3.15: NPV improvement for a finite range of discount rates with the two develop-ment faces
3.5.4 Performance comparisons of 1-face and 2-face discounted Steiner pointalgorithms
Figure 3.16 shows the optimal locations of the discounted Steiner point when the mine
operates with one and two development faces. When the mine is being operated with
two development faces the optimal location of the discounted Steiner point is closer to
the surface portal for higher discount rates whereas with one development face, it is
closer to the higher value resource.

3.5 Numerical trials 73
Figure 3.16: The optimal locations of the discounted Steiner point for one and two devel-opment faces
Table 3.7 summarises the optimal NPV when one and two development faces are
operated in an underground mine. For any discount rate the two faces operation gives
higher NPV and the NPV improvement increases with the discount rate as shown in Fig.
3.17. However, this improvement in the NPV must be offset against the cost of the extra
equipment.
Discount NPV with NPV with NPVrate/% p.a two faces /$M one face /$M improvement/$
5 85.039 84.618 4210008 83.050 82.402 64800010 81.789 80.997 79200012 80.576 79.645 93100015 78.837 77.708 112900020 76.134 74.700 1434000
Table 3.7: The comparison of the 1FDSPA and 2FDSPA for a finite range of discount rates

74 Optimally locating a single discounted Steiner point without a gradient constraint
Figure 3.17: NPV improvement by applying the 2FDSPA compared with the 1FDSPA
3.6 Conclusion
In this chapter, two algorithms are proposed to locate a discounted Steiner point to max-
imise the NPV. The 1-face discounted Steiner point algorithm locates the discounted
Steiner point when a mine is being operated with a single face at a time [50, 51]. The
2-face discounted Steiner point algorithm locates a single discounted Steiner point when
a mine is being operated with two faces simultaneously [52].

Chapter 4
Optimally locating a single discountedSteiner point in the presence of a
gradient constraint
THIS chapter focuses on the optimisation of underground mine access to obtain max-
imum Net Present Value (NPV) in the presence of a gradient constraint. The gra-
dient constraint defines the navigability conditions for trucks along the underground
tunnels. The analysis is based on the given surface portal or breakout point and whether
the resource points are above or below the discounted Steiner point. The network con-
figurations in the maximum NPV network that cannot be optimal are identified and for
each optimal configuration a way of locating the discounted Steiner point is presented.
The Gradient-Constrained Discounted Steiner Point Algorithm (GCDSPA) is proposed to
optimally locate the discounted Steiner point in the underground mine.
4.1 Introduction
In Chapter 3, the discounted Steiner point algorithms were implemented to optimally
locate the discounted Steiner point. Once this point was known, the access to the mine
was determined by connecting the link between the discounted Steiner point and each of
the given terminals. In general, these links should represent minimum length navigable
paths between the end points. However, in order to make the model as simple and gen-
eral as possible the navigability conditions in Chapter 3 were relaxed, and it was assumed
that the links were straight line segments. A consequence of this was that the theory and
75

76Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
the algorithms outlined in Chapter 3 can be only applied to underground mines where
the terminal points lie in a near-horizontal plane and hence the gradient constraint would
be satisfied.
In this chapter, the maximum NPV network is examined in the presence of the gradi-
ent constraint. The gradient constraint is one of the most important physical constraints
on the access network. The maximum gradient depends on the type of trucks to be em-
ployed. The decline or incline links of an underground mine are always designed without
violating the maximum gradient. Typically this is 1:7 to 1:9 in an underground mine. The
objective is to design the underground access network so as to maximise the NPV in the
presence of the gradient constraint. Therefore, this problem can be treated as optimally
locating the junction points in the mine. Once the junction points are known, the access
network can be constructed accordingly. The following definitions are from [48].
Definition 4.1. Let p = (xp, yp, zp), q = (xq, yq, zq) be two points in Euclidean space. The
gradient of the line through p and q is defined as g(pq),
g(pq) =|zq − zp|√
(xq − xp)2 + (yq − yp)2
Definition 4.2. An edge pq is labelled as an f -edge, an m-edge or a b-edge if g(pq) < m,
g(pq) = m or g(pq) > m respectively, where m is the maximum gradient.
The length of the edge pq, |pq|g, changes according to the gradient g(pq) as below.
|pq|g =
|pq| =√(xq − xp)2 + (yq − yp)2 + (zq − zp)2 if g(pq) ≤ m
|pq|v = |zq − zp|√
1 + m−2 if g(pq) > m
The lengths |pq|, |pq|v denote distances defined by the Euclidean and the vertical metric
respectively.
If the edge pq is an m-edge or an f -edge then the two points p and q are connected
with a straight line and the length is given by the Euclidean length as illustrated in Fig.
4.1a. If the edge pq is a b-edge, then the two points p, q are connected by a zig-zag line.
The b-edge is represented by two line segments with the maximum gradient connected

4.1 Introduction 77
at the corner point c as shown in Fig. 4.1b and the length is given by |pq|v. The angle α
is the angle between the line segment cp or cq and the horizontal plane through c. In this
chapter, straight lines are used to illustrate the b-edges. However, if it is necessary the ap-
propriate embeddings of the b-edges are used to rigorously demonstrate the arguments.
(a) If g(pq) ≤ m (b) If g(pq) > m
Figure 4.1: The representation of the edge pq
Brazil et al [48] referred to the set of labels around a Steiner point as the labelling
of that point. Any particular choice of the labelling places restrictions on the geometry
of the network. A labelling that can be achieved in a minimum length Steiner tree is
referred to as a feasibly optimal labelling. The objective of the problem they analysed was
to minimise the infrastructure and development costs of an underground mine without
taking a discount rate into account. The labels ga, gb, gc are deduced from the gradients
of the edges from a Steiner point to the three adjacent points a, b, c. The labelling gagb/gc
represents a configuration where the edges as, bs lie on one side of the horizontal plane
through the Steiner point and the edge cs is on the other side of the plane. The authors
concluded that up to symmetry there are five feasibly optimal labellings f f / f , f f /m,
f m/m, mm/m, mm/b that can occur in a minimum length network. However, they did
not take the discounted cost into account in their model. A greater range of optimal
labellings is possible with discounting, and hence new theory is required to locate the
discounted Steiner point for each labelling.
In Section 4.2, the problem is formulated as a tree problem. In Sections 4.3, 4.4, 4.5,
the network configurations that cannot be optimal in the maximum NPV network with a
single discounted Steiner point are derived. In Section 4.6, the configurations for which
the discounted Steiner point lies at one of the vertices (the degenerate cases) are stud-
ied. In Section 4.7, for each optimal configuration a method to determine the optimal

78Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
location of the discounted Steiner point is presented. Section 4.8 proposes the gradient-
constrained discounted Steiner point algorithm for optimally locating a single discounted
Steiner point.
The definitions below are used throughout this chapter. The maximum gradient is
always less than 1 (m < 1). α = arctan(m), thus α < π/4.
s - the location of the discounted Steiner point for a given configuration in the tree T.
s′ - the new location of the discounted Steiner point in the tree T′ obtained by a small
perturbation of s.
c - corner point of a b-edge.
Distances between points are measured using the gradient metric.
lT0 , lT
1 , lT2 - the distance of the points p0, p1, p2 respectively, from s where s ∈ T.
lT′0 , lT′
1 , lT′2 - the distance of the points p0, p1, p2 respectively, from s′ where s′ ∈ T′.
lTt , lT′
t - the total length of the trees T and T′ respectively.
lT01 = lT
0 + lT1 and lT′
01 = lT′0 + lT′
1 .
lT02 = lT
0 + lT2 and lT′
02 = lT′0 + lT′
2 .
lT12 = lT
1 + lT2 and lT′
12 = lT′1 + lT′
2 .
lTt = lT
0 + lT1 + lT
2 and lT′t = lT′
0 + lT′1 + lT′
2 .
4.2 Problem explanation
Figure 4.2: A schematic representation of a simple underground mine
The discounted Steiner point s is adjacent to three vertices p0, p1, p2 as illustrated
in Fig. 4.2. The point p0 is a surface portal or breakout point and the points p1, p2 are

4.2 Problem explanation 79
resource points with $V1, $V2 worth of ore respectively. The order for reaching the points
p1, p2 is given. The point p1 is accessed first, then p2. Each edge p0s, sp1, sp2 can be an
f -edge, m-edge or a b-edge. One edge is constructed at a time. The objective is to locate a
single discounted Steiner point in the presence of the gradient constraint that maximises
the NPV. The NPV function is given by,
NPV = V1r−(l0+l1)/D + (V2 + Vc)r−(l0+l1+l2)/D −Vc (4.1)
where Vc = CD/ ln r, r = 1 + d. The objective function given in (4.1) is the proven
formula Eq. (3.4) in Chapter 3.
The parameters C, D, d represent the construction cost rate, the development rate and
the discount rate and are given in this problem. The distances l0, l1, l2 are measured in
the gradient metric from p0, p1, p2 to s respectively. The line segments p0s, sp1, sp2 are
called incline or decline links. If the point p1 or p2 is above s then the line segment that
connects s and p1 or p2 is an incline link, otherwise it is a decline link.
This optimisation problem is modelled as a network tree problem. A gradient-constrain-
ed discounted Steiner tree T is a maximum Net Present Value tree, spanning a given set of
nodes N in space with edges whose gradients are all no more than an upper bound m
which is the maximum gradient. The nodes in T but not in N are referred to as discounted
Steiner points. Such a tree has costs associated with its edges and values associated with
nodes. In order to reach the nodes in the tree, the edges need to be constructed. In this
problem, the three nodes p0, p1, p2 are given and the resource points are always at p1, p2.
A discounted Steiner point s is added to maximise the NPV for the underground mine.
The labellings are essential to define a tree configuration. Each tree is identified by its
labelling. The tree T is labelled according to the label type of the edges p0s, sp1, sp2. An
edge that is above the discounted Steiner point, or at the same level, is denoted by the
chevron mark (e.g. labelled b). In the tree labelling, first the edge p0s, then the edge sp1
and finally the edge sp2 is indicated. For example, the labelling noted as bm f means that
the edges p0s, sp1, sp2 in the tree T are a b-edge, an m-edge and f -edge respectively. In
addition, the edge p0s is above s, and the other two edges are below s in the tree T. Brazil
et al [48] used a forward slash instead of a chevron mark to differentiate the edges.

80Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
The approach is to identify the non-optimal labellings by considering all the possible
labellings that can occur in a gradient-constrained discounted Steiner tree. In order to
show a labelling of a tree is not optimal, a new tree T′ is defined such that the perturbation
of s ∈ T in some direction decreases both the lengths l01, lt. Then it will increase the NPV
given in (4.1) as explained in Theorem 4.1. Moreover, the labelling that defines the tree T
is not optimal and will be called a non-optimal labelling. However, reducing both l01 and
lt simultaneously is not always possible. Sometimes decreasing lt results in an increased
l01. Therefore, the problem is different from the one discussed in [48].
Theorem 4.1. Suppose s′ ∈ T′ is the new location of the discounted Steiner point which is
obtained by a small perturbation of s ∈ T. If the perturbation of s to s′ satisfies at least one pair of
conditions:
lT01 > lT′
01 and lTt > lT′
t or lT01 = lT′
01 and lTt > lT′
t (4.2)
then the labelling defined by the tree T is non-optimal.
Proof. Let NPVT, NPVT′ be the Net Present Values of the trees T, T′ respectively, which
can be expressed as,
NPVT = V1r−lT01/D + (V2 + Vc)r−lT
t /D −Vc
NPVT′ = V1r−lT′01 /D + (V2 + Vc)r−lT′
t /D −Vc
If the perturbation of s to s′ satisfies at least one pair of conditions lT01 > lT′
01 and lTt > lT′
t
or lT01 = lT′
01 and lTt > lT′
t simultaneously then NPVT′ > NPVT and so the labelling that
defines the tree T is non-optimal.
The way the distance is calculated varies according to the label type of each edge.
The three possible label types are an f , m or a b label. The distance l01 depends on the
labels of the edges p0s and sp1 while lt depends on the labels of the edges p0s, sp1, sp2.
Proposition 4.1 explains the length variation of the edges and the change of the label for a
small perturbation of s. Apart from that the Scalene inequality is used and it is described
as follows; If one side of a triangle has greater length than another side, then the angle

4.2 Problem explanation 81
opposite the longer side has the greater measure, and conversely.
Proposition 4.1. (i) (Corollary 1(ii), [48]) When s moves vertically to the same side (or the
opposite side) of the horizontal plane through s as a, the edge sa becomes shorter (or, respec-
tively, longer) regardless of the gradient of sa.
(ii) (Remark 1, [48]) For a small perturbation of s, an f -edge or a b-edge remains an f -edge or
a b-edge respectively.
(iii) (Theorem 3, [48]) Suppose there is an f -edge sc, lying below (above) s, and there is an m-
edge, say sa, lying above (below) s. When s moves vertically upwards (or downwards), sa
shrinks strictly faster than sc stretches.
Theorem 4.2. If s is a single degree-3 discounted Steiner point in a gradient-constrained dis-
counted Steiner tree then there are at most two incident edges lying strictly above (or below) the
horizontal plane through s.
(a) Layout L1 (b) Layout L2 (c) Layout L3
Figure 4.3: The possible network layouts that need to be considered for this problem
Proof. LetP be a horizontal plane through s and letPu andPl be the two open half-spaces
above and below P respectively. Since p0 is a surface portal or a breakout point from
existing infrastructure, it is always in Pu (p0 ∈ Pu). However, since s is a degree-3 dis-
counted Steiner point, the three points p0, p1, p2 cannot be all in Pu or in Pl which implies
that there are at most two incident edges lying strictly above (or below) P . Therefore, the
only possibilities for the points p1, p2 are p1, p2 ∈ Pl ∪ P , p1 ∈ Pl ∪ P and p2 /∈ Pl ∪ P ,
and p2 ∈ Pl ∪ P and p1 /∈ Pl ∪ P . This leads to three possible network layouts L1, L2,
L3 as shown in Fig. 4.3 where:
(i) L1 : p0 ∈ Pu, p1, p2 ∈ Pl ∪ P
(ii) L2 : p0 ∈ Pu, p2 ∈ Pu ∪ P , p1 ∈ Pl
(iii) L3 : p0 ∈ Pu, p1 ∈ Pu ∪ P , p2 ∈ Pl .

82Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
The layout L1 consists of decline links only. However, the layouts L2, L3 have both
decline and incline links. Let ga, gb, gc denote the respective labels of the edges p0s, sp1,
sp2 where each label is either an m, f or a b label. Then the labelling of this degree-3
discounted Steiner point is gagbgc, gagbgc, gagbgc for each layout L1, L2, L3 respectively.
Lemma 4.1. If the layouts L1 and L2 are symmetric with respect to the horizontal plane through
the discounted Steiner point s, then the labellings for the edges p0s and sp1 in L2 are interchanged
with respect to L1 and the edge sp2 is below s in L1 and above s in L2. Consequently the problem
is symmetric with respect to interchanging the points p0, p1.
Proof. Let NPVL1 and NPVL2 be the Net Present Values for the layouts L1 and L2 respec-
tively, which can be expressed as in (4.1):
NPVL1 = V1r−(l0+l1)/D + (V2 + Vc)r−(l0+l1+l2)/D −Vc
NPVL2 = V1r−(l1+l0)/D + (V2 + Vc)r−(l1+l0+l2)/D −Vc
From the above equations, the objective functions described by the two layouts L1 and L2
are the same. By interchanging p0 and p1, the non-optimal labellings for the layout L2 can
be shown to be similar to those for the layout L1. Therefore, the label type of each edge
p0s, sp1, sp2 in L2 is exactly the same as for the edges sp1, p0s, sp2 in L1 respectively. As
an example, if the labelling bmm is non-optimal for the layout L1, then the corresponding
non-optimal labelling for the layout L2 is the labelling mbm.
The aim in this chapter is to classify non-optimal sets of labellings of edges that are
incident with s in a gradient-constrained discounted Steiner network. Theorem 4.2 has
identified the three network layouts L1, L2, L3 that need to be analysed. For each net-
work layout, three possible labellings for each edge need to be considered as to whether
they are optimal or not which yields 27 possible labellings. Therefore, in total 81 network
labellings in three network layouts L1, L2, L3 need to be analysed for this problem.
In the following sections, Theorem 4.1 and Proposition 4.1 from Section 4.2 are mainly
used to eliminate the non-optimal labellings from all the possible labellings in the three

4.3 Identification of the non-optimal labellings in the layout L1 83
network layouts. However, it is challenging to identify the right direction to perturb
the discounted Steiner point to satisfy both conditions in Theorem 4.1. Nevertheless, in
the sections below a new theory is developed to identify the non-optimal labellings in a
gradient-constrained discounted Steiner network.
4.3 Identification of the non-optimal labellings in the layout L1
Figure 4.4: The locations of the points p0, p1, p2 in the layout L1
In this section, the non-optimal labellings when the two resource points p1, p2 are
below the discounted Steiner point are studied. The edge p0s is above s and the edges
sp1, sp2 are below s as shown in Fig. 4.4. First, the non-optimal labellings are identified
when the edge p0s is an arbitrary label. Let x, x be an f , m or a b label. It is shown that
the labellings xbx, xxb are not optimal by showing that there is a perturbation of s that
shortens the distances l01, lt simultaneously, so that the inequalities in Theorem 4.1 are
satisfied.
Lemma 4.2. If the edge sp1 or sp2 is labelled b, then the labelling is not optimal in the layout L1.
(a) Labelling xbx (b) Labelling xxb
Figure 4.5: The edge sp1 or sp2 is labelled as a b-edge in the layout L1
Proof. For the labellings xbx and xxb the discounted Steiner point s is perturbed verti-
cally downwards when the edge p0s has an m or a b label as shown in Fig. 4.5. First, the

84Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
labelling xbx is examined.
If the edge p0s is a b-edge it remains as a b-edge for a small perturbation of s by Propo-
sition 4.1(ii). Hence the length from p0 to p1 through s or s′ remains the same and so
|p0s|+ |sp1| = |p0s′|+ |s′p1| which yields lT0 + lT
1 = lT′0 + lT′
1 , and therefore lT01 = lT′
01.
If the edge p0s is an m-edge then it becomes a b-edge with the move. Hence the length
from p0 to p1 also remains the same, so similarly |p0s| + |sp1| = |p0s′| + |s′p1| and so
lT01 = lT′
01.
If the edge sp2 is labelled either an f , m or b then by Proposition 4.1(i), |sp2| > |s′p2| and
so lT2 > lT′
2 .
From the above, it follows that lT01 ≥ lT′
01 and lT2 > lT′
2 and so lTt > lT′
t . These inequalities
satisfy the conditions in Theorem 4.1.
However, if the edge p0s (x) is an f -edge then in order to satisfy the conditions in
Theorem 4.1, the discounted Steiner point needs to be perturbed along the edge sp1 or sp2
for the labellings f bx and f xb respectively, as shown in Fig. 4.6. The b-edge is embedded
such that the points s, s′, p2 and s, s′, p1 are on the same vertical plane for the labellings
f bx and f xb respectively.
(a) Labelling f bx (b) Labelling f xb
Figure 4.6: The edge p0s is labelled as an f -edge in the layout L1
For the labelling f bx, by applying the triangle inequality to the triangle p0ss′,
|p0s|+ |ss′| > |p0s′|. Suppose |s′p1| > 0 is added to both sides of this inequality. Then,
|p0s|+ |ss′|+ |s′p1| > |p0s′|+ |s′p1| which implies that lT0 + lT
1 > lT′0 + lT′
1 , and therefore
lT01 > lT′
01.
If the edge sp2 is labelled either an m, f or a b, then in the triangle ss′p2, ∠p2ss′ < α <
π/2 and ∠ss′p2 > π − 2α > π/2, hence ∠ss′p2 > ∠p2ss′. Therefore, from the Scalene
inequality, |sp2| > |s′p2| and so lT2 > lT′
2 .

4.3 Identification of the non-optimal labellings in the layout L1 85
By the above, lT01 > lT′
01 and lT2 > lT′
2 . It follows that lTt > lT′
t . Therefore, the perturbation of
the discounted Steiner point satisfies the inequalities in Theorem 4.1. Hence, the labelling
f bx is not optimal. Similarly, it can be shown that the labelling f xb is not optimal.
Table 4.1 gives the variation of the labels for a small perturbation of the discounted
Steiner point by considering the labelling xbx. This table summarises the possible transi-
tions of the labels for the edges p0s, sp1, sp2 in the tree T to the edges p0s′, s′p1, s′p2 in the
tree T′. In some cases the edge p0s′ or s′p2 has either an f or a b label depending on the
perturbed distance of the discounted Steiner point in tree T.
Labels of the edges in T Labels of the edges in T′ Verification ofp0s (x) sp1 sp2 (x) p0s′ s′p1 s′p2 Theorem 4.1
b b b b b b lT01 = lT′
01, lTt > lT′
tb b m b b f lT
01 = lT′01, lT
t > lT′t
b b f b b f lT01 = lT′
01, lTt > lT′
tm b b b b b lT
01 = lT′01, lT
t > lT′t
m b m b b f lT01 = lT′
01, lTt > lT′
tm b f b b f lT
01 = lT′01, lT
t > lT′t
f b b f b b lT01 > lT′
01, lTt > lT′
tf b m f b f lT
01 > lT′01, lT
t > lT′t
f b f f b f lT01 > lT′
01, lTt > lT′
t
Table 4.1: The variation of the labels for a small perturbation of the discounted Steinerpoint in the layout L1
Lemma 4.2 shows the labellings xbx, xxb are not optimal which expands to the state-
ment that the labellings bbb, bbm, bb f , bmb, b f b, mbb, mbm, mb f , mmb, m f b, f bb, f bm,
f b f , f mb, f f b are not optimal. Therefore, these 15 labellings can be eliminated from the
27 possible labellings in the layout L1.
The other non-optimal labellings are identified below. Cases are organised by fixing
the labelling of the edge p0s as a b or an f label, and then varying the labels of the other
two edges sp1, sp2. By Lemma 4.2, it is not necessary to consider the edge sp1 or sp2
having a b label. The labellings that are not optimal when the edge p0s is a b-edge are
identified in Lemma 4.3.
Lemma 4.3. If the edge p0s is a b-edge, the labellings bm f , b f m, b f f are not optimal.

86Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
(a) Labelling bm f (b) Labelling b f m (c) Labelling b f f
Figure 4.7: Non-optimal labellings when the edge p0s is a b-edge in the layout L1
Proof. Case 1: the labelling bm f .
In the labelling bm f , the b-edge is embedded such that the points c0, s, p2 are on the same
vertical plane as shown in Fig. 4.7a. The discounted Steiner point s is perturbed upwards
along the edge p0s.
In the triangle ss′p2, ∠p2ss′ < 2α < π/2 and ∠ss′p2 > π − 2α > π/2 and so ∠ss′p2 >
∠p2ss′.
Therefore, from the Scalene inequality, |sp2| > |s′p2| and hence lT2 > lT′
2 .
Also both the paths p0s, sp1 have the same gradient m, therefore
|p0s|+ |sp1| = |p0s′|+ |s′p1|, hence lT0 + lT
1 = lT′0 + lT′
1 and so lT01 = lT′
01.
From the above, lT01 = lT′
01 and lT2 > lT′
2 which implies that lTt > lT′
t and hence the condi-
tions in Theorem 4.1 are satisfied. Again the labelling bm f is not optimal.
Case 2: the labelling b f m.
Similar to Case 1, the b-edge is embedded such that the points c0, s, p1 are on the same
vertical plane. In this case, the discounted Steiner point s is perturbed upwards along the
edge p0s as shown in Fig. 4.7b. The labelling b f m can be proved to be not optimal in a
similar way to the labelling bm f since the only difference is that the edges sp1 and sp2 are
interchanged.
Case 3: the labelling b f f .
For the labelling b f f , the discounted Steiner point s is perturbed upwards along the edge
p0s as shown in Fig. 4.7c. The edge c0s can be chosen to be on the same vertical plane
as the edge sp2. Also, lT01 = |p0s′| + |ss′| + |sp1| and lT′
01 = |p0s′| + |s′p1|. By apply-
ing the triangle inequality to the triangle s′sp1, |s′s|+ |sp1| > |s′p1|. By adding |p0s′| to
both sides of the inequality (|p0s′| > 0), |s′s|+ |sp1|+ |p0s′| > |s′p1|+ |p0s′|. Therefore,

4.3 Identification of the non-optimal labellings in the layout L1 87
lT0 + lT
1 > lT′0 + lT′
1 and so lT01 > lT′
01.
In the triangle ss′p2, ∠p2ss′ < 2α < π/2 and ∠ss′p2 > π − 2α > π/2, hence ∠ss′p2 >
∠p2ss′. Therefore, from the Scalene inequality, |sp2| > |s′p2| and so lT2 > lT′
2 which im-
plies lTt > lT′
t .
From the above, lT01 > lT′
01 and lTt > lT′
t which satisfies the conditions in Theorem 4.1.
Therefore, the labelling b f f is not optimal.
Table 4.2 summarises the variation of the labels for a small perturbation of the dis-
counted Steiner point for the labellings bm f , b f m, b f f . This table summarises the possi-
ble transitions of the labels in tree T to T′. In some cases the edge s′p1 or s′p2 has either
an m or f label depending on the perturbed distance of the discounted Steiner point in
tree T.
Labels of the edges in T Labels of the edges in T′ Verification ofp0s sp1 sp2 p0s′ s′p1 s′p2 Theorem 4.1b m f b m m or f lT
01 = lT′01, lT
t > lT′t
b f m b m or f m lT01 > lT′
01, lTt > lT′
tb f f b m or f m or f lT
01 > lT′01, lT
t > lT′t
Table 4.2: The variation of the labels in tree T to T′ for a small perturbation of s
Next, the non-optimal labellings when the edge p0s is an f -edge and the other two
edges sp1 and sp2 with labellings f m, m f , mm are considered. The other possible combi-
nations of labels for the edges sp1, sp2 are not optimal as was shown in Lemma 4.2.
Lemma 4.4. If the edge p0s is an f -edge, the labellings f mm and f m f are not optimal.
(a) Labelling f mm (b) Labelling f m f
Figure 4.8: Non-optimal labellings when the edge p0s is an f -edge in the layout L1
Proof. For the labellings f mm, f m f the discounted Steiner point s is perturbed vertically
downwards to s′ as illustrated in Fig. 4.8. Proposition 4.1(iii) implies that the edge sp1

88Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
shrinks strictly faster than the edge p0s stretches. Therefore, |p0s|+ |sp1| > |p0s′|+ |s′p1|
and so lT0 + lT
1 > lT′0 + lT′
1 and hence lT01 > lT′
01. In the triangle ss′p2, p2ss′ < π/2 and
∠p2s′s > π/2. Hence, ∠p2s′s > ∠p2ss′. Therefore, from the Scalene inequality,
|sp2| > |s′p2| and so lT2 > lT′
2 .
From the above, lT01 > lT′
01, lT2 > lT′
2 which implies that lTt > lT′
t . Therefore, the perturbation
of the discounted Steiner point satisfies the inequalities in Theorem 4.1, so the labellings
f mm, f m f are not optimal. Hence, Lemma 4.4 is proven.
Table 4.3 describes the variation of the labels for a small perturbation of the dis-
counted Steiner point for the labellings f mm and f m f . In some cases the edge p0s′ has
either an m or f label depending on the perturbed distance of the discounted Steiner
point in tree T.
Labels of the edges in T Labels of the edges in T′ Verification ofp0s sp1 sp2 p0s′ s′p1 s′p2 Theorem 4.1f m m f or m f f lT
01 > lT′01, lT
t > lT′t
f m f f or m f f lT01 > lT′
01, lTt > lT′
t
Table 4.3: The variation of the labels in tree T to T′ for a small perturbation of s
As a summary, Lemmas 4.2, 4.3 and 4.4 show that 20 labellings are non-optimal out
of the 27 labellings in the layout L1. Hence, these results are used to state Theorem 4.3
which summarises the non-optimal labellings when the two resource points are below
the discounted Steiner point.
Theorem 4.3. If s is a degree-3 discounted Steiner point in the layout L1, then the labellings bbb,
bbm, bb f , bmb, bm f , b f b, b f m, b f f , mbb, mbm, mb f , mmb, m f b, f bb, f bm, f b f , f mb, f mm,
f m f , f f b are not optimal.
Theorem 4.3 implicitly expresses that one of the labellings bmm, mmm, mm f , m f m,
m f f , f f m or f f f is optimal for the layout L1.
4.4 Identification of the non-optimal labellings in the layout L2
In this section, it is assumed that the discounted Steiner point s connects to three vertices
p0, p1, p2 as shown in Fig. 4.9. The points p0, p2 are above s and p1 is below s. Lemma 4.1

4.5 Identification of the non-optimal labellings in the layout L3 89
Figure 4.9: The locations of the points p0, p1, p2 in the layout L2
established that the objective function is symmetric under interchanging p0, p1 because
the path to reach the first resource point is still the same.
In the layout L1 only the location of the point p2 is changed compared with the lay-
out L2. Moreover, the layout L2 is a mirror image with respect to the horizontal plane
through the discounted Steiner point of the layout L1 as shown in Fig. 4.3a and 4.3b. For
this reason, Lemmas 4.2, 4.3, 4.4 are applicable for the labellings in the layout L2 as well,
with minor changes to the labellings, since p2 is above s. Therefore, again 20 non-optimal
labellings exist under interchanging of the labels due to the symmetry of the problem as
explained in Lemma 4.1. Theorem 4.4 summarises the non-optimal labellings when the
first resource point is below the discounted Steiner point.
Theorem 4.4. If s is a degree-3 discounted Steiner point in the layout L2, then the labellings bbb,
bbm, bb f , bmb, bmm, bm f , b f b, b f m, b f f , mbb, mb f , mmb, m f b, m f m, m f f , f bb, f bm, f b f ,
f mb, f f b are not optimal.
Theorem 4.4 implicitly expresses that one of the labellings mbm, mmm, mm f , f mm,
f m f , f f m or f f f is optimal when the first resource point is below the discounted Steiner
point. Up to this point it has been shown that 40 labellings are non-optimal out of the 54
labellings in the layouts L1 and L2.
4.5 Identification of the non-optimal labellings in the layout L3
In this section, the non-optimal labellings for the last network layout are identified. The
points p0, p1 are above the discounted Steiner point s and p2 is below s as shown in Fig.
4.10. In Lemma 4.5, the non-optimal labellings for the edges p0s, sp1 are described.
Lemma 4.5. If the edge p0s or sp1 is labelled b, then the labelling is not optimal in the layout L3.

90Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
Figure 4.10: The locations of the points p0, p1, p2 in the layout L3
(a) Labelling bxx (b) Labelling xbx
Figure 4.11: The edge p0s or sp1 is labelled as a b-edge in the layout L3
Proof. The discounted Steiner point s is perturbed vertically upwards when the edge sp2
is an m-edge or a b-edge as shown in Fig. 4.11. First, the labelling bxx is considered.
If the edge sp2 is a b-edge then for a small perturbation of s by Proposition 4.1(ii), it
remains as a b-edge on the move. Hence the length |p0 p2| also remains the same so
|p0s|+ |sp2| = |p0s′|+ |s′p2| which yields lT0 + lT
2 = lT′0 + lT′
2 . Therefore, lT02 = lT′
02.
If the edge sp2 is an m-edge then it becomes a b-edge on the move. Hence the length from
p0 to p2 also remains the same, so similarly |p0s|+ |sp2| = |p0s′|+ |s′p2| and so lT02 = lT′
02.
For any labelling of the edge sp2, by Proposition 4.1(i), |sp1| > |s′p1| and so lT1 > lT′
1 .
From the above, lT02 = lT′
02 and lT1 > lT′
1 . Therefore, lTt > lT′
t .
From Proposition 4.1(i), since the discounted Steiner point is perturbed vertically up-
wards, |p0s| > |p0s′|, |sp1| > |s′p1| and so |p0s| + |sp1| > |p0s′| + |s′p1| which means
lT0 + lT
1 > lT′0 + lT′
1 . Therefore, lT01 > lT′
01 which implies that the perturbation of the dis-
counted Steiner point satisfies the inequalities in Theorem 4.1.
However, if the edge sp2 is an f -edge, the discounted Steiner point needs to be per-
turbed along the b-edge p0s or sp1 for the labellings bx f and xb f respectively, as shown
in Fig. 4.12.
For the labelling bx f , by applying the triangle inequality to the triangle p2ss′, |sp2| +
|ss′| > |s′p2| then by adding the distance |p0s′| > 0 to both sides, |sp2|+ |ss′|+ |p0s′| >
|s′p2|+ |p0s′| which implies lT0 + lT
2 > lT′0 + lT′
2 . Therefore, lT02 > lT′
02.

4.5 Identification of the non-optimal labellings in the layout L3 91
(a) Labelling bx f (b) Labelling xb f
Figure 4.12: The edge sp2 is labelled as an f -edge in the layout L3
If the edge sp1 (x) is a b-edge it will remain a b-edge but lT1 > lT′
1 .
If the edge sp1 (x) is an f -edge or m-edge, then in the triangle ss′p1, ∠p1ss′ < α < π/2
and ∠ss′p1 > π − 2α > π/2. Hence, ∠ss′p1 > ∠p1ss′.
Therefore, from the Scalene inequality, |sp1| > |s′p1| and so lT1 > lT′
1 . From the above,
it follows that lT01 ≥ lT′
01 and lTt > lT′
t . This can similarly be shown for the labelling xb f .
Therefore, the labellings bx f and xb f are not optimal.
Table 4.4 gives the variation of the labels for a small perturbation of the discounted
Steiner point. This table summarises the possible transitions of the labels for the edges
p0s, sp1, sp2 in the tree T to the edges p0s′, s′p1, s′p2 in the tree T′. In some cases the
edge s′p1 or s′p2 has either an m or f label depending on the perturbed distance of the
discounted Steiner point in tree T.
Labels of the edges in T Labels of the edges in T′ Verification ofp0s sp1 (x) sp2 (x) p0s′ s′p1 s′p2 Theorem 4.1b b b b m or f b lT
01 > lT′01, lT
t > lT′t
b b m b m or f b lT01 > lT′
01, lTt > lT′
tb b f b m or f m or f lT
01 > lT′01, lT
t > lT′t
b m b b f b lT01 > lT′
01, lTt > lT′
tb m m b f b lT
01 = lT′01, lT
t > lT′t
b m f b m or f m or f lT01 = lT′
01, lTt > lT′
tb f b b f b lT
01 > lT′01, lT
t > lT′t
b f m b f b lT01 > lT′
01, lTt > lT′
tb f f b f m or f lT
01 > lT′01, lT
t > lT′t
Table 4.4: The variation of the labels for a small perturbation of the discounted Steinerpoint in the layout L3
From Lemma 4.5, the labellings bbb, bbm, bb f , bmb, bmm, bm f , b f b, b f m, b f f , mbb,

92Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
mbm, mb f , f bb, f bm, f b f are not optimal which eliminates 15 possibilities out of the 27
in the layout L3. Since the labellings bxx and xbx are not optimal, as shown in Lemma
4.5, neither the edge p0s nor the edge sp1 can be a b-edge. Therefore, the possible labels
left for the edges p0s and sp1 are only either an m-edge or f -edge.
Next, the labellings that are not optimal when the edge p0s is an m-edge or f -edge are
identified. The labellings that need to be analysed for non-optimality are mmb, mmm,
mm f , m f b, m f m, m f f , f mb, f mm, f m f , f f b, f f m, f f f only. The other labellings are not
optimal according to Lemma 4.5.
Lemma 4.6. If the edge p0s is labelled m, then the labellings mm f and m f f are not optimal.
(a) Labelling mm f (b) Labelling m f f
Figure 4.13: The edge p0s is labelled as an m-edge in the layout L3
Proof. For the labellings mm f , m f f the discounted Steiner point s is perturbed vertically
upwards as shown in Fig. 4.13. Hence, by Proposition 4.1(i), |p0s| > |p0s′|, |sp1| > |s′p1|
and so |p0s|+ |sp1| > |p0s′|+ |s′p1| which means lT0 + lT
1 > lT′0 + lT′
1 . Therefore, lT01 > lT′
01.
From Proposition 4.1(iii), since s is moved vertically upwards, the edge p0s shrinks strictly
faster than the edge sp2 stretches and so |p0s| + |sp2| > |p0s′| + |s′p2| which implies
lT0 + lT
2 > lT′0 + lT′
2 . Hence, lT02 > lT′
02.
From the above lT01 > lT′
01, lT02 > lT′
02 and so lTt > lT′
t . The perturbation of the discounted
Steiner point reduces both the distances l01 and lt which satisfies the conditions in The-
orem 4.1. Therefore, the labellings mm f and m f f can never be optimal to maximise the
NPV.
Table 4.5 describes the variation of the labels for a small perturbation of the dis-
counted Steiner point for the labellings mm f and m f f . In some cases the edge s′p2 has
either an m or f label depending on the perturbed distance of the discounted Steiner
point in tree T.

4.5 Identification of the non-optimal labellings in the layout L3 93
Labels of the edges in T Labels of the edges in T′ Verification ofp0s sp1 sp2 p0s′ s′p1 s′p2 Theorem 4.1m m f f f f or m lT
01 > lT′01, lT
t > lT′t
m f f f f f or m lT01 > lT′
01, lTt > lT′
t
Table 4.5: The variation of the labels in tree T to T′ for a small perturbation of s
In summary, Lemmas 4.5 and 4.6 eliminate 17 labellings out of the 27 possible con-
figurations in the layout L3. Therefore, these non-optimal labellings can be stated in
Theorem 4.5.
Theorem 4.5. If s is a degree-3 discounted Steiner point in the layout L3, then the labellings bbb,
bbm, bb f , bmb, bmm, bm f , b f b, b f m, b f f , mbb, mbm, mb f , mm f , m f f , f bb, f bm, f b f are
not optimal.
Theorem 4.5 implicitly expresses that one of the labellings mmb, mmm, m f b, m f m,
f mb, f mm, f m f , f f b, f f m or f f f is optimal for the layout L3.
Theorems 4.3, 4.4 and 4.5 imply that for a gradient-constrained discounted Steiner
tree with a single discounted Steiner point, 57 labellings are not optimal to maximise
the NPV. The possible optimal labellings for the three network layouts L1, L2, L3 are
summarised below.
1. Two resource points are below the discounted Steiner point (as in the layout L1).
One of the labellings f f f , f f m, m f m, mm f , mmm, m f f or bmm is feasibly optimal.
2. Two resource points are above the discounted Steiner point.
(a) First resource point is below the discounted Steiner point (as in the layout L2).
One of the labellings f f f , f f m, f m f , f mm, mm f , mmm or mbm is feasibly
optimal.
(b) First resource point is above the discounted Steiner point (as in the layout L3).
One of the labellings mmm, mmb, m f b, m f m, f mb, f mm, f m f , f f b, f f m or f f f
is feasibly optimal.
In the next section the discounted Steiner point degenerate cases are identified and
then the optimal labellings for these cases are investigated.

94Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
4.6 Degenerate cases of the discounted Steiner point
The discounted Steiner point degenerate cases occur when the discounted Steiner point
coincides with one of the vertices in the tree. In this section, Lemma 4.7 defines the opti-
mal labellings when the discounted Steiner point coincides with either p1 or p2. However,
it is difficult to obtain the optimal labellings when the discounted Steiner point is at the
point p0 because there is a trade-off between the optimal labellings. The trade-off is that
decreasing l01 increases lt.
Lemma 4.7. If the discounted Steiner point coincides with either p1 or p2, then the labelling b f
is not optimal.
Figure 4.14: Labelling b f
Proof. Suppose the discounted Steiner point s is at the point p1 (or p2) as illustrated in Fig.
4.14 and assume that the labelling b f is optimal. A small perturbation of s along the edge
p0s is considered. The points c0, s, p2 are on the same vertical plane. In the triangle ss′p2,
∠p2ss′ < 2α < π/2 and ∠ss′p2 > π − 2α > π/2. Hence, ∠ss′p2 > ∠p2ss′. Therefore,
from the Scalene inequality, |sp2| > |s′p2| and so lT2 > lT′
2 .
If |p0s| is added to both sides of the inequality |sp2| > |s′p2|, where |p0s| = |ss′|+ |p0s′|,
then |p0s| + |sp2| > |p0s| + |s′p2| and so |p0s| + |sp2| > |ss′| + |p0s′| + |s′p2|. Hence,
lTt > lT′
t .
Also both the paths p0s and p0 p1 have the same gradient m, therefore |p0s| = |p0s′| +
|s′p1| which implies lT0 + lT
1 = lT′0 + lT′
1 . Therefore, lT01 = lT′
01.
From the above, lT01 = lT′
01, lTt > lT′
t . Therefore, the perturbation of the discounted Steiner
point satisfies the inequalities in Theorem 4.1. That implies the labelling b f is not optimal.

4.7 Locating the discounted Steiner point for the optimal labellings 95
It follows from Lemma 4.7 that the optimal labelling is one of the labellings bb, bm,
mb, mm, m f , f b, f m or f f when the discounted Steiner point lies at either p1 or p2.
4.7 Locating the discounted Steiner point for the optimal labell-ings
The study of cones and their intersections is necessary to understand the placement of
the Steiner point in gradient-constrained networks. The theory of conic intersections
has been used in gradient-constrained minimum Steiner networks to optimally locate
the Steiner point. Some of the theory developed in [47] can be applied to gradient-
constrained discounted Steiner trees to determine the optimal location of the discounted
Steiner point.
(a) If g(p0 p1) > m (b) If g(p0 p1) < m (c) If g(p0 p1) = m
Figure 4.15: Intersections of cones C0, C1 with different relative locations
Suppose C0, C1 are two right circular double cones with vertices p0, p1 respectively,
and the generating angle for each of C0, C1 is arccot m where m is the maximum gradient.
The intersection of C0, C1 is categorised according to the gradient g(p0 p1). Weng [49] has
shown that, if g(p0 p1) > m, g(p0 p1) < m and g(p0 p1) = m, the intersection is an ellipse,
a hyperbola and a line passing through p0 p1 respectively, as shown in Fig. 4.15. There are
two related special cases as well. If the points p0, p1 lie in a vertical line, then g(p0 p1) = ∞
and the intersection is a circle lying on a horizontal plane as illustrated in Fig. 4.16a. If
the points p0, p1 lie in a horizontal plane then g(p0 p1) = 0, and the hyperbola lies in a
vertical plane as shown in Fig. 4.16b.
The location of the Steiner point is discussed when it is at the intersection of m-edges.
Suppose A, B, C are three right circular double cones with vertices a, b, c respectively,

96Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
(a) If g(p0 p1) = ∞ (b) If g(p0 p1) = 0
Figure 4.16: Special cases of intersections of cones C0, C1
and the generating angle for each ofA, B, C is equal to arccot m where m is the maximum
gradient. Suppose the vertices a, b, c are adjacent to the Steiner point. If the Steiner point
s connects the point a with an m-edge as shown in Fig. 4.17a, then the edge as lies on the
cone A. If the Steiner point s falls on two m-edges as, bs as illustrated in Fig.4.17b, then
the Steiner point lies on the intersection of the two conesA, B which is either an ellipse or
a hyperbola. Similarly, when the Steiner point meets all three m-edges as, bs, cs as shown
in Fig. 4.17c, then the Steiner point lies on an intersection of the three cones A, B, C, and
hence an intersection of the three conics: two ellipses and one hyperbola.
(a) s connects with onem-edge (b) s meets with two m-edges
(c) s meets with threem-edges
Figure 4.17: When the Steiner point meets m-edges
Brazil et al [47] discussed gradient-constrained minimum networks and determined the
optimal location of the Steiner point for the optimal labellings f f / f , f f /m, f m/m, mm/m
and mm/b. However, the authors did not study a method of locating the Steiner point
with the objective of maximising the NPV. In the following sections, a new theory is
developed to locate the discounted Steiner point in a gradient-constrained discounted
Steiner tree. Proposition 4.2 establishes the important properties of the intersection of
two cones.
Proposition 4.2. (Theorem 2.1, [47]) Suppose Ca, Cb are two right circular cones whose gen-

4.7 Locating the discounted Steiner point for the optimal labellings 97
erating lines have the same gradient m. Without loss of generality assume a = (u, 0, h), b =
(−u, 0,−h), u ≥ 0, h ≥ 0.
(i) The intersection Eab (or simply E ) of Ca and Cb is either an ellipse or a hyperbola depending
on whether g(ab) > m or g(ab) < m, respectively. When g(ab) = m, Eab degenerates
into a straight line through a, b.
(ii) The ellipse or hyperbola has two extreme points υ = (h/m, 0, mu), υ∗ = (−h/m, 0,−mu),
referred to as its vertices.
(iii) Let s ∈ E . If E is an ellipse then |as| + |bs| = 2za/ sin α is constant, where α =
arctan(m). If E is hyperbola then |as|+ |bs| achieves its minimum when s = υ (or υ∗).
(iv) For any point s ∈ E let tab be the (upward) tangent vector at s. Then the gradient of tab is
less than m. Moreover, if E is an ellipse, then ∠(−→sa , tab) ≤ 90◦, ∠(−→sb ,−tab) ≤ 90◦ and
equality holds if and only if s = υ or s = υ∗. If E is a hyperbola and s lies on the upper
branch, then ∠(−→sa ,−tab) ≤ 90◦, ∠(−→sb ,−tab) ≤ 90◦, and the equality holds if and only if
s = υ. The results are similar if s lies on the lower branch.
Lemma 4.8. Any perturbation of the discounted Steiner point s along the intersection of the pair
of m-edges p0s, sp1 or p0s, sp2 or sp1, sp2 does not change the distance l01, l02, l12 respectively,
when the intersection is an ellipse or a line or a circle. However, when the intersection is a hy-
perbola the distance l01, l02, l12 becomes minimum when s is at one of the extreme points of the
hyperbola.
Proof. If the intersection of the pair of m-edges p0s, sp1 or p0s, sp2 or sp1, sp2 makes an
ellipse then by Proposition 4.2(iii) the distance l01, l02 or l12 respectively, is fixed or a
constant. Similarly, if the intersection of the pair of m-edges p0s, sp1 or p0s, sp2 or sp1,
sp2 makes a hyperbola then by Proposition 4.2(ii) the distance l01, l02 or l12 respectively,
becomes minimum when s is at one of the extreme points of the hyperbola. Below, it is
shown that if the intersection of the pair of m-edges p0s, sp1 or p0s, sp2 or sp1, sp2 makes
a circle or a line then the perturbation of the discounted Steiner point does not change
the distances l01, l02, l12 along the circle or line and these distances are fixed or a constant.
When the intersection is a line, the discounted Steiner point can be perturbed along the
line p0 p1 without violating the labels of the edges.

98Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
(a) A line (b) A circle
Figure 4.18: When the intersection of two m-edges is a line or a circle
Therefore, |p0s| + |sp1| = |p0s′| + |s′p1| = |p0 p1| = lT01 = lT′
01 which implies that l01 is
fixed or a constant as shown in Fig 4.18a.
When the intersection is a circle, the discounted Steiner point can be perturbed along the
circle without violating the labels of the edges.
The radius of the circle is fixed, therefore |p0s|+ |sp1| = |p0s′|+ |s′p1| = |p0 p1| = lT01 =
lT′01 which yields that the distance l01 is fixed or a constant as shown in Fig 4.18b. Similarly,
this can be shown when the points p0 and p2 or p1 and p2 are connected by two m-edges
and their intersection is a circle or a line.
Lemma 4.9. If the pair of edges p0s, sp1 or p0s, sp2 or sp1, sp2 are labelled as an m-edge (or a
b-edge) and a b-edge (or an m-edge) around s (the labelling mb or bm), then these two edges can
be embedded to form a single b-edge (or two m-edges) without changing the total distance from
the two points p0, p1 or p0, p2 or p1, p2 to s respectively.
Proof. Suppose the edges p0s, sp1 are labelled as an m-edge (or b-edge) and a b-edge (or
m-edge) around s as shown in Fig. 4.19. The distance between the points p0 and p1 is l01.
The b-edge can be embedded such that the line segments p0s, sc′1 (or p0c0, c0c′0) are on
the same line which generates the edge p0 p1 as a b-edge or two m-edges p0c′1, c′1 p1 (p0c′0,
c′0 p1), therefore the distance l01 remains the same. Similarly, this can be shown for the
pair of edges p0s, sp2 and sp1, sp2.
In the previous section, Theorems 4.3, 4.4, 4.5 determine the non-optimal labellings for
all the possible layouts in a gradient-constrained discounted Steiner network. Moreover,
these theorems show that 57 labellings are not optimal. Therefore, one of the labellings

4.7 Locating the discounted Steiner point for the optimal labellings 99
(a) Labelling mb (b) Labelling bm
Figure 4.19: Embedding of the labelling mb to a single b-edge
f f f , f f m, m f m, mm f , mmm, m f f , bmm, f f f , f f m, f m f , f mm, mm f , mmm, mbm, mmm,
mmb, m f b, m f m, f mb, f mm, f m f , f f b, f f m or f f f is optimal.
Each feasibly optimal labelling is categorised according to the number of labels of
the same type they have and then for each category a method of locating the discounted
Steiner point is explained. The three categories are when the optimal labelling has:
1. at least two m-edges.
Labellings mmm, mmm, mmm, bmm, mmb, mbm, mm f , mm f , m f m, f mm, m f m,
f mm.
2. exactly one m-edge.
Labellings m f b, f mb, f f m, f f m, f f m, f m f , f m f , m f f .
3. no m-edges.
Labellings f f f , f f f , f f f , f f b.
The labellings can be categorised according to the number of degrees of freedom of
the discounted Steiner point. The degree of freedom is defined as the minimum number
of independent coordinates which can specify all possible positions of the discounted
Steiner point in a gradient-constrained discounted Steiner tree for the given labelling
completely. Hence, the movement of the Steiner point for these optimal labellings can be
categorised according to the degree of freedom.
• The configurations that have no degrees of freedom:
The optimal labellings mmm, mmm, mmm.
• The configurations that have one degree of freedom:
The optimal labellings bmm, mmb, mbm, mm f , mm f , m f m, f mm, m f m, f mm.
• The configurations that have two degrees of freedom:

100Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
The optimal labellings m f b, f mb, f f m, f f m, f f m, f m f , f m f , m f f .
• The configurations that have three degrees of freedom:
The optimal labellings f f f , f f f , f f f , f f b.
In the next section, a general method to analyse these kinds of problems is derived and
then that approach is used to determine the location of the discounted Steiner point for
some of the categories above.
The procedure for determining the optimal location for a given optimal configuration
The steps below explain the method of locating the discounted Steiner point in a gradient-
constrained discounted Steiner network. The idea is to replace the decision variables
l0, l1, l2 in the objective function with new variables. Then these added variables are
used to define the movement of the discounted Steiner point completely for the given
configuration and the problem is reformulated in terms of the added variables. The steps
are:
1. Add the new variables for the optimisation problem.
Try to find the relationship between l0, l1 and l2 if there is any. If it is hard to identify
any relationship among them at least one new variable is added to the problem
which will explain the movement of the discounted Steiner point completely. Let
µ be the added vector of variables into the optimisation problem. These variables
are used to represent the number of degrees of freedom of the discounted Steiner
point. Therefore, in a problem like this the maximum number of these variables is
three.
2. Rewrite the decision variables in the original problem in terms of the added vari-
ables.
The distances l0, l1, l2 are expressed as a function of the added variables where,
l0 = f0(µ) (4.3)
l1 = f1(µ) (4.4)
l2 = f2(µ) (4.5)

4.7 Locating the discounted Steiner point for the optimal labellings 101
3. Redefine the optimisation problem.
By substituting (4.3), (4.4), (4.5) into the original objective function given in (4.1),
NPV(µ) = V1r−( f0(µ)+ f1(µ))/D + (V2 + Vc)r−( f0(µ)+ f1(µ)+ f2(µ))/D −Vc (4.6)
The objective function is rewritten in terms of µ as in (4.6). Therefore, the new
optimisation problem becomes,
maximise V1r−( f0(µ)+ f1(µ))/D + (V2 + Vc)r−( f0(µ)+ f1(µ)+ f2(µ))/D −Vc
such that µ ∈ Rk k = 1, 2 or 3
4. Find the optimal solution for the added variables by differentiating the objective
function.
Equation (4.6) is differentiated with respect to µ and then set equal to zero,
f (µ) = (A + B)(
∂ f0(µ)
∂µ+
∂ f1(µ)
∂µ
)+ B
∂ f2(µ)
∂µ= 0 (4.7)
where A = V1 ln r/D and B = (V2 ln r/D + C)r− f2(µ)/D where C was defined in
Chapter 3.
The partial derivatives can be obtained by differentiating (4.3), (4.4), (4.5) with re-
spect to µ. Finally, Equation (4.7) can be written as f (µ) = 0. If there is one added
variable in the problem, then (4.7) is reduced to a single variable function. Most of
the time, this one variable function is a polynomial function so Newton’s method
or other root finding techniques can be used to find the solution for this problem.
However, if there are two added variables in the problem, then two polynomial
functions need to be solved in order to optimally locate the discounted Steiner
point.
5. Find the optimal solution for the original problem.
Suppose µ∗ is the solution to (4.7) and the distances l∗0 , l∗1 , l∗2 are the optimal values

102Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
of the original problem where,
l∗0 = f0(µ∗) l∗1 = f1(µ
∗) l∗2 = f2(µ∗)
Since the optimal distances l∗0 , l∗1 , l∗2 are known from above, the optimal location of
the discounted Steiner point can be calculated using simple geometry.
6. Analyse the problem for zero and infinite discount rates.
These discount rates are two special cases of the gradient-constrained discounted
Steiner trees. For an infinite discount rate, B = 0. Therefore,
∂ f0(µ)
∂µ+
∂ f1(µ)
∂µ= 0 (4.8)
For zero discount rate. A = 0, B = C. Therefore,
∂ f0(µ)
∂µ+
∂ f1(µ)
∂µ+
∂ f2(µ)
∂µ= 0 (4.9)
Equations (4.8), (4.9) are much easier to solve than (4.7) since they do not have the
exponential term in r with the added variables.
A summary of this approach is given in Fig. 4.20.
A robust procedure for reformulating a given NPV maximisation problem to de-termine the location of the discounted Steiner point efficiently
1 Add new variables for the optimisation problem.2 Rewrite the decision variables in the original problem in terms of the added
variables.3 Redefine the optimisation problem with the added variables.4 Find the optimal solution for the added variables by differentiating the objective
function.5 Find the optimal solution for the original problem.6 Analyse the problem for zero and infinite discount rates.
Figure 4.20: The procedure for determining the optimal location of the discounted Steinerpoint for a given optimal configuration

4.7 Locating the discounted Steiner point for the optimal labellings 103
Comparison of the problems: length minimisation vs NPV maximisation
The similarities and differences of the problems of length minimisation and NPV max-
imisation are now analysed. In both the optimisation problems, the objective function is
expressed as a function of the total length of the network l0 + l1 + l2. However, in the
NPV maximisation problem there is an additional term of l0 + l1 in the objective func-
tion. In order to determine the location of the Steiner point where the labelling has two
m-edges, the Steiner point can be perturbed along the intersections of relevant cones only
as explained earlier, otherwise it violates the labels on the edges. Therefore, it is neces-
sary to study the variation of l01, lt along the intersections. As in Theorem 4.1, if a small
perturbation of the Steiner point along the intersection keeps l01 fixed or reduced, then
for these labellings the optimal location of the Steiner point can be found as a length min-
imisation problem. Hence, for such labellings the equations developed by Brazil et al
[47] on gradient-constrained minimum Steiner networks can be used to locate the Steiner
point. Because of that the location of the discounted Steiner point is independent of the
discounting for these particular labellings. The findings of Brazil et al [47] are used to
state Proposition 4.3.
Proposition 4.3. Suppose the Steiner point s = (x, y, z) connects to three points a = (xa, ya, za),
b = (xb, yb, zb) and c = (xc, yc, zc) in Euclidean space and m is the maximum gradient.
(i) (Theorem 3.1, [47]) For the labelling b/mm, the system of equations that determines the
location of the Steiner point uniquely is,
g(sb) = g(sc) = my− yc
x− xc=
yb − yc
xb − xc(4.10)
Further, the system (4.10) is linear and there is only one solution.
(ii) (Theorem 3.2, [47]) For the labelling m/mm, the system of equations that determines the
location of the Steiner point uniquely is,
g(as) = g(bs) = g(cs) = m (4.11)
Further, the system (4.11) is quadratic which has at most two real different solutions s1,s2,

104Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
lying on Ebc. If zs1 = zs2 , then both the points are optimal, otherwise the one with the
smaller z-coordinate is optimal.
(iii) (Theorem 3.6, [47]) For the labelling m/m f , the system of equations that determines the
location of the Steiner point uniquely is,
g(as) = g(sb) = m ∠(−→sc , tab) = 90◦ (4.12)
where tab is the vector at s tangent to Ca ∩ Cb in the plane of intersection. Further, the
system (4.12) is quartic which has only one real solution.
4.7.1 Locating the discounted Steiner point when the optimal labelling has atleast two m-edges
In this section, the optimal location for the discounted Steiner point is derived when the
optimal labelling has at least two m-edges. The labellings mmm, mmm, mmm, bmm, mmb,
mbm, mm f , mm f , m f m, f mm, m f m, f mm are considered. It will be shown that for these
labellings, the theory discussed in [47] can be used to locate the discounted Steiner point.
Labellings mmm, mmm, mmm
The discounted Steiner point cannot be perturbed to reduce the distances l01, lt simulta-
neously because in the labellings mmm, mmm, mmm the discounted Steiner point has no
degrees of freedom. Also, the distance l01 defined by two m-edges is fixed or minimum
according to Lemma 4.8. Therefore, for these optimal labellings the discounted Steiner
point can be found as a length minimisation problem. Hence the optimal location of the
discounted Steiner point is determined by Proposition 4.3(ii). The system of equations
that is used to locate the discounted Steiner point for the labellings mmm, mmm, mmm is,
g(p0s) = g(sp1) = g(sp2) = m (4.13)
Theorem 4.6. The discounted Steiner point s for the labellings mmm, mmm, mmm is determined
by the quadratic system of Equations (4.13).

4.7 Locating the discounted Steiner point for the optimal labellings 105
Labellings bmm, mbm, mmb
The m-edges and the b-edge in the labellings bmm, mbm define the distance l01 and these
m-edges, the b-edge can be treated as a single b-edge as per Lemma 4.9. The distance
l01 is fixed or minimum from Lemma 4.8. Therefore, the point p2 is connected with the
discounted Steiner point to minimise the total length of the network.
The two m-edges in the labelling mmb define the distance l01 which is fixed or mini-
mum from Lemma 4.8. Therefore, the location of the discounted Steiner point for these
labellings is found by Proposition 4.3(i). The system of equations that is used to locate
the discounted Steiner point,
for the labelling bmm,
g(sp1) = g(sp2) = my− y0
x− x0=
y1 − y2
x1 − x2(4.14)
for the labelling mbm,
g(p0s) = g(sp2) = my− y1
x− x1=
y0 − y2
x0 − x2(4.15)
for the labelling mmb,
g(p0s) = g(sp1) = my− y2
x− x2=
y0 − y1
x0 − x1(4.16)
Theorem 4.7. The discounted Steiner point s for the labellings bmm, mbm, mmb is determined
by the linear system of Equations (4.14), (4.15), (4.16) respectively.
Labellings mm f , mm f , m f m, m f m, f mm, f mm
The discounted Steiner point can be perturbed without violating the gradients along the
intersections of only two m-edges since the discounted Steiner point has one degree of
freedom for these labellings mm f , mm f , m f m, f mm, m f m, f mm. The two m-edges in
the labellings mm f , mm f define the distance l01. Lemma 4.8 shows that l01 is fixed or
minimum. Therefore, the third point p2 is connected with s as an f -edge to minimise the
total length of the network. For this reason, locating the discounted Steiner point for the

106Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
labellings mm f , mm f is reduced to a length minimisation problem.
Similarly, the two m-edges in the labellings f mm, f mm define the distance l12. Lemma
4.8 shows that l12 is fixed or minimum. Therefore, along the intersection l12 is a constant
so the point p0 is connected to the closest point on the intersection, because it minimises
both the distances lt, l01.
Also, the two m-edges in the labellings m f m, m f m define the distance l02. Lemma
4.8 shows that the distance l02 is fixed or minimum. So the point p1 is connected to
the closest point on the intersection. Therefore, for all these labellings the problems are
reduced to a length minimisation problem and the theory developed by Brazil et al [47]
is valid to determine the location the discounted Steiner point. Therefore, the location
of the discounted Steiner point for these labellings is found by Proposition 4.3(iii). The
system of equations that is used to locate the discounted Steiner point is,
for the labellings mm f , mm f ,
g(p0s) = g(sp1) = m ∠(−→sp2, tp0 p1) = 90◦ (4.17)
for the labellings f mm, f mm,
g(sp1) = g(sp2) = m ∠(−→p0s, tp1 p2) = 90◦ (4.18)
for the labellings m f m, m f m,
g(p0s) = g(sp2) = m ∠(−→sp1, tp0 p2) = 90◦ (4.19)
Theorem 4.8. The discounted Steiner point s for the labellings mm f , mm f , m f m, m f m, f mm,
f mm is determined by the quartic system of Equations (4.17), (4.18), (4.19) respectively.
Corollary 4.1. The optimal location of the discounted Steiner point s for the labellings bmm,
mmb, mbm, mmm, mmm, mmm, mm f , mm f , m f m, m f m, f mm, f mm does not change with
discounting.
Proof. Corollary 4.1 follows from Theorems 4.6, 4.7, 4.8.

4.7 Locating the discounted Steiner point for the optimal labellings 107
4.7.2 Locating the discounted Steiner point when the optimal labelling hasexactly one m-edge
In this section, some new theory is derived to locate the discounted Steiner point in a
gradient-constrained discounted Steiner tree. The optimal labellings m f b, f mb, f f m,
f f m, f f m, f m f , f m f , m f f are considered. The theory developed in [47] can be used
to locate the discounted Steiner point for the labellings m f b and f mb as discussed below.
Labellings m f b and f mb
(a) Labelling f mb (b) Labelling m f b
Figure 4.21: Labellings m f b, f mb
The m-edge and the b-edge in the labelling f mb can be treated as a single b-edge
as in Lemma 4.9. Hence, the points p1, p2 can be connected by a single b-edge so the
distance l12 is fixed. By doing this, one degree of freedom can be removed. Then the
discounted Steiner point s can be moved along the edge p1c2. If the point p0 is connected
with the discounted Steiner point to minimise lt, then it minimises l01 as shown in Fig.
4.21. Therefore, the optimal location of s can be found in a similar way to the labelling
f mm. Similarly, for the labelling m f b the discounted Steiner point can be obtained in
a similar way to the labelling m f m. The system of equations that is used to locate the
discounted Steiner point is,
for the labelling f mb,
g(sp1) = g(sc2) = m ∠(−→sp0, tp1c2) = 90◦ (4.20)

108Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
for the labelling m f b,
g(p0s) = g(sc2) = m ∠(−→sp1, tp0c2) = 90◦ (4.21)
Theorem 4.9. The discounted Steiner point s for the labellings f mb, m f b is determined by the
quartic system of Equations (4.20), (4.21) respectively.
Note that the solution that is obtained by solving (4.20), (4.21) is a maximum for a
given value of c2. In order to obtain the globally optimal point, the edge c2 p2 is rotated
around the vertex point p2 and for each location of c2 the optimal locations of s are ob-
tained and the corresponding NPVs are compared. Then the location of s which provides
the maximum NPV is selected as the optimal location for the labelling f mb.
Labellings f f m, f f m, f f m, f m f , m f f , f f m
Figure 4.22: Locating the discounted Steiner point for the labelling f f m
The way of locating the discounted Steiner point for the labellings f f m, f f m, f f m,
f m f , f m f , m f f is considered. Suppose the four points p0 = (r0 cos θ0, r0 sin θ0, z0),
p1 = (r1 cos θ1, r1 sin θ1, z1), p2 = (0, 0, 0) and s = (r cos θ, r sin θ, z) are given where r, θ, z
are in a cylindrical coordinate system as shown in Fig. 4.22. The discounted Steiner point
s varies with z and θ since these represent two degrees of freedom. The distances l0, l1, l2
are the distances from p0 to s, s to p1 and s to p2 respectively. The theory is developed by
considering the labelling f f m.
Step 1:
Since the edge sp2 is an m-edge, the distance l2 can be expressed as per the distances in

4.7 Locating the discounted Steiner point for the optimal labellings 109
the gradient metric,
l2 =z√
1 + m2
m(4.22)
r =l2√
1 + m2(4.23)
The coordinates of the discounted Steiner point are s = (r cos θ, r sin θ, z) and then the
value of r is replaced by (4.23). Therefore,
s =(
l2√1 + m2
cos θ,l2√
1 + m2sin θ,
l2m√1 + m2
)
Hence the movement of the discounted Steiner point depends on l2 and θ.
Step 2:
The distance from s to p0 can be written in terms of l2 and θ,
l20 = (r0 cos θ0 − r cos θ)2 + (r0 sin θ0 − r sin θ)2 + (z0 − z)2
l20 = r2
0 + r2 + (z0 − z)2 − 2rr0 cos(θ − θ0)
by substituting r and z values,
l20 = r2
0 +l22
1 + m2 +
(z0 −
l2m√1 + m2
)2
− 2r0l2√
1 + m2cos(θ − θ0)
l20 = r2
0 + l22 + z2
0 − 2z0l2m√
1 + m2− 2r0
l2√1 + m2
cos(θ − θ0)
l20 = l2
2 + β0l2 + µ0l2 cos(θ − θ0) + λ0
l0 =√
l22 + β0l2 + µ0l2 cos(θ − θ0) + λ0 = f0(l2, θ) (4.24)
where λ0 = r20 + z2
0 , µ0 = −2r0/√
1 + m2 and β0 = −2z0m/√
1 + m2 (β0 = z0mµ0/r0
and λ0 = ((1 + m2)µ20 + z2
0)/4 ). Similarly, the distance from s to p1,
l21 = (r1 cos θ1 − r cos θ)2 + (r1 sin θ1 − r sin θ)2 + (z1 − z)2
l21 = r2
1 + r2 + (z1 − z)2 − 2rr1 cos(θ − θ1)

110Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
Similarly, by substituting r and z values,
l21 = r2
1 +l22
1 + m2 +
(z1 −
l2m√1 + m2
)2
− 2r1l2√
1 + m2cos(θ − θ1)
l21 = r2
1 + l22 + z2
1 − 2z1l2m√
1 + m2− 2r1
l2√1 + m2
cos(θ − θ1)
l21 = l2
2 + β1l2 + µ1l2 cos(θ − θ1) + λ1
l1 =√
l22 + β1l2 + µ1l2 cos(θ − θ1) + λ1 = f1(l2, θ) (4.25)
where λ1 = r21 + z2
1 , µ1 = −2r1/√
1 + m2 and β1 = −2z1m/√
1 + m2 (β1 = z1mµ1/r1
and λ1 = ((1 + m2)µ21 + z2
1)/4 ).
Hence the lengths l0, l1 can be eliminated from the objective function which can be
expressed in terms of l2, θ only.
Step 3:
Equations (4.24), (4.25) are substituted into the objective function,
NPV(l2, θ) = V1r−( f0(l2,θ)+ f1(l2,θ))/D + (V2 + Vc)r−( f0(l2,θ)+ f1(l2,θ)+l2)/D −Vc (4.26)
Now, the optimisation problem is rewritten in terms of l2 and θ.
maximise V1r−( f0(l2,θ)+ f1(l2,θ))/D + (V2 + Vc)r−( f0(l2,θ)+ f1(l2,θ)+l2)/D −Vc
such that,
0 ≤ θ ≤ 2π, l2 ≥ 0
Step 4:
To maximise the NPV, the objective function is differentiated with respect to l2 and then
set equal to zero,
V1r−( f0(l2,θ)+ f1(l2,θ))/D(
∂ f0
∂l2+
∂ f1
∂l2
)+ (V2 + Vc)r−( f0(l2,θ)+ f1(l2,θ)+l2)/D
(∂ f0
∂l2+
∂ f1
∂l2+ 1)= 0
V1
(∂ f0
∂l2+
∂ f1
∂l2
)+ (V2 + Vc)r−l2/D
(∂ f0
∂l2+
∂ f1
∂l2+ 1)= 0

4.7 Locating the discounted Steiner point for the optimal labellings 111
(∂ f0
∂l2+
∂ f1
∂l2
)+ A
(∂ f0
∂l2+
∂ f1
∂l2+ 1)= 0
(1 + A)
(∂ f0
∂l2+
∂ f1
∂l2
)+ A = 0
∂ f0
∂l2+
∂ f1
∂l2=−A
1 + A(4.27)
where A = (V2 + Vc)r−l2/D/V1. The value of A is substituted into (4.27),
∂ f0
∂l2+
∂ f1
∂l2=−A
1 + A=
−11 + ( V1
V2+Vc)rl2/D
=−1
1 + Vrl2/D (4.28)
where V = V1/(V2 + Vc)
Similarly, differentiate with respect to θ and then set equal to zero,
V1r−( f0(l2,θ)+ f1(l2,θ))/D(
∂ f0
∂θ+
∂ f1
∂θ
)+ (V2 + Vc)r−( f0(l2,θ)+ f1(l2,θ)+l2)/D
(∂ f0
∂θ+
∂ f1
∂θ
)= 0
V1
(∂ f0
∂θ+
∂ f1
∂θ
)+ (V2 + Vc)r−l2/D
(∂ f0
∂θ+
∂ f1
∂θ
)= 0(
∂ f0
∂θ+
∂ f1
∂θ
)+ A
(∂ f0
∂θ+
∂ f1
∂θ
)= 0
(1 + A)
(∂ f0
∂θ+
∂ f1
∂θ
)= 0
∂ f0
∂θ+
∂ f1
∂θ= 0
(4.29)
differentiating (4.24), (4.25) with respect to l2 and θ,
∂ f0
∂l2=
2l2 + β0 + µ0 cos(θ − θ0)
2√
l22 + β0l2 + µ0l2 cos(θ − θ0) + λ0
(4.30)
∂ f1
∂l2=
2l2 + β1 + µ1 cos(θ − θ1)
2√
l22 + β1l2 + µ1l2 cos(θ − θ1) + λ1
(4.31)
∂ f0
∂θ=
−µ0l2 sin(θ − θ0)
2√
l22 + β0l2 + µ0l2 cos(θ − θ0) + λ0
(4.32)
∂ f1
∂θ=
−µ1l2 sin(θ − θ1)
2√
l22 + β1l2 + µ1l2 cos(θ − θ1) + λ1
(4.33)

112Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
The values in (4.30), (4.31), (4.32), (4.33) are substituted into (4.28), (4.29),
2l2 + β0 + µ0 cos(θ − θ0)√l22 + β0l2 + µ0l2 cos(θ − θ0) + λ0
+2l2 + β1 + µ1 cos(θ − θ1)√
l22 + β1l2 + µ1l2 cos(θ − θ1) + λ1
=−2
1 + Vrl2/D
(4.34)
µ0 sin(θ − θ0)√l22 + β0l2 + µ0l2 cos(θ − θ0) + λ0
+µ1 sin(θ − θ1)√
l22 + β1l2 + µ1l2 cos(θ − θ1) + λ1
= 0
(4.35)
Since all the other parameters are known, l2 and θ can be found by solving (4.34) and
(4.35). Similarly, this can be shown for the labellings f f m, f f m, f m f , f m f , m f f by inter-
changing the location of the points and corresponding edges. Because the cone that s lies
on is a convex surface, only one discounted Steiner point s exists.
Theorem 4.10. The discounted Steiner point s for the labellings f f m, f f m, f f m, f m f , f m f ,
m f f is determined by the system of Equations (4.34), (4.35).
From Theorems 4.9 and 4.10, for the labellings m f b, f mb, f f m, f f m, f f m, f m f , m f f ,
f f m the location of s depends on discounting.
4.7.3 Locating the discounted Steiner point when the optimal labelling hasno m-edges
In this section, the optimal location for the discounted Steiner point is derived when the
optimal labelling has no m-edges. The labellings f f f , f f f , f f f , f f b are considered.
Labellings f f f , f f f , f f f
In the labellings f f f , f f f , f f f the discounted Steiner point is located by using the equian-
gular techniques as discussed in Chapter 3 because for these labellings the gradient con-
straint is not active. Therefore, the theory and the algorithm in Chapter 3 can be used to
locate the discounted Steiner point for the labellings f f f , f f f , f f f .

4.7 Locating the discounted Steiner point for the optimal labellings 113
Corollary 4.2. For the labellings f f f , f f f , f f f if the discounted Steiner point does not coincide
with p0, p1 or p2, then the paths from the discounted Steiner point to p0 and p1 make equal angles
with the path from the discounted Steiner point to p2 (equiangular condition).
(a) Labelling f f f (b) Labelling f f f (c) Labelling f f f
Figure 4.23: Equiangular conditions for the labellings f f f , f f f , f f f
Proof. This was proven in Chapter 3 Section 3.3 when the gradient constraint is not active
in the tree. The equiangular condition is shown for the labellings f f f , f f f , f f f in Fig.
4.23.
As discussed in Chapter 3, the two equations that need to be solved to locate the
discounted Steiner point for these configurations are,
cos θ = − 12(krl2/D + 1)
(4.36)
l2 =d0d1| sin(2θ + ψ)|
sin θ√
d20 + d2
1 + 2 cos(2θ + ψ)d0d1
(4.37)
The 1-face discounted Steiner point algorithm explained in Chapter 3 is used to solve
(4.36), (4.37).
Theorem 4.11. The discounted Steiner point s for the labellings f f f , f f f , f f f is determined by
the system of Equations (4.36), (4.37).
Labelling f f b
A method of finding the discounted Steiner point for the labelling f f b is studied. In the
labelling f f b the edges p0s, sp1, sp2 are an f -edge, f -edge and a b-edge respectively, as
shown in Fig. 4.24. This can be treated as locating the discounted Steiner point similar to

114Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
the labelling f f m. First, the corner point of the b-edge is fixed at the point c2. By doing
that one degree of freedom can be removed. Since c2 is fixed, the solution obtained by
solving (4.34), (4.35) is a local maximum. In order to obtain the globally optimal point,
the edge c2 p2 is rotated around the vertex point p2 and for each location of c2 the optimal
locations of s are obtained and the corresponding NPVs are compared. Then the location
of s which provides the maximum NPV is selected as the optimal location for the labelling
f f b.
Figure 4.24: Labelling f f b
Theorem 4.12. The discounted Steiner point s for the labelling f f b is determined by the system
of Equations (4.34), (4.35).
From Theorems 4.11 and 4.12, the location of the discounted Steiner point depends
on the discounting for the labellings f f f , f f f , f f f , f f b.
Corollary 4.3. For the labellings m f b, f mb, f f m, f f m, f f m, f m f , f m f , m f f , f f f , f f f , f f f ,
f f b, the optimal location of the discounted Steiner point s changes with discounting.
Proof. Corollary 4.3 follows from Theorems 4.10, 4.11, 4.12.
4.7.4 Summary
Table 4.6 summarises the equations that need to be solved to determine the location of
the discounted Steiner point in a gradient-constrained discounted Steiner tree.

4.8 Gradient-Constrained Discounted Steiner Point Algorithm (GCDSPA) 115
Labelling The system of equations to be solvedmmm, mmm, mmm (4.13)bmm, mmb, mbm (4.14), (4.15), (4.16)
mm f , mm f , m f m, f mm, m f m, f mm (4.17), (4.18), (4.19)m f b, f mb (4.20), (4.21)
f f m, f f m, f f m, f m f , f m f , m f f (4.34), (4.35)f f f , f f f , f f f (4.36), (4.37)
f f b (4.34), (4.35)
Table 4.6: Optimally locating the discounted Steiner point in a gradient-constrained dis-counted Steiner tree
4.8 Gradient-Constrained Discounted Steiner Point Algorithm(GCDSPA)
In this section, the steps of the Gradient-Constrained Discounted Steiner Point Algorithm
(GCDSPA) are introduced. This algorithm is used to determine the optimal location of
the discounted Steiner point in the presence of the gradient constraint and only one de-
velopment face is considered.
Step 1
In this step, it is assumed that the optimal labelling has at least two m-edges. If so, the la-
bellings that need to be considered are only the labellings mmm, mmm, mmm, bmm, mmb,
mbm, mm f , mm f , m f m, f mm, m f m, f mm. For these labellings the location of the dis-
counted Steiner point is obtained from Theorems 4.6, 4.7, 4.8. Once this point is known,
the distances l0, l1, l2 can be calculated and then the corresponding NPV is obtained using
(4.1) for each labelling. Then the labelling that provides the maximum NPV is selected
as the optimal labelling for this step. This optimal labelling (G1) and the corresponding
NPV (NPV1) are recorded as (G1,NPV1).
Step 2
Next, the optimal labelling is assumed to have exactly one m-edge. The possible la-
bellings that need to be considered in this step are only the labellings m f b, f mb, f f m,
f f m, f f m, f m f , f m f , m f f . For these labellings the location of the discounted Steiner
point is obtained from Theorems 4.9, 4.10. If the discounted Steiner point is known then
the corresponding NPV is calculated for each labelling similar to the previous step. Then

116Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
the labelling that provides the maximum NPV (NPV2) is selected as the optimal labelling
(G2) in this step and recorded as (G2,NPV2).
Step 3
The optimal labelling is assumed to have no m-edges. The possible labellings that need
to be considered in this step are only the labellings f f f , f f f , f f f , f f b and the location
of the discounted Steiner point is obtained from Theorems 4.11, 4.12. Similarly, as be-
fore NPV is calculated for each optimal labelling. Then the labelling that provides the
maximum NPV (NPV3) is chosen as the optimal labelling (G3) in this step. Both optimal
labelling and NPV are recorded as (G3,NPV3).
Step 4
The discounted Steiner point degenerate cases are considered in this step hence the opti-
mal labelling has only two edges. The discounted Steiner point s is placed at the points
p0, p1, p2 without violating the gradient constraint and then the NPV is calculated. The
labelling that provides the maximum NPV is identified and recorded as (G4,NPV4).
Step 5
The NPVs obtained from each step NPV1, NPV2, NPV3, NPV4 are compared. Then
the labelling with the maximum NPV is selected as the globally optimal labelling for this
problem and this output is given as (G,N PV).
4.9 Conclusion
This chapter analyses all possible non optimal sets of labellings of edges that are inci-
dent with the discounted Steiner point. The analysis is based on the given surface portal
or breakout point and whether the resource points are above or below the discounted
Steiner point. Three network layouts need to be analysed in this problem. For each net-
work layout, three possible labellings for each edge need to be considered as to whether
they are optimal or not which yields 27 possible labellings. Therefore, in total 81 net-
work labellings in three network layouts need to be analysed for this problem. Then for
each layout the non-optimal network configurations in the maximum NPV network are
identified. It is shown out of the 81 network labellings 57 labellings are not optimal to

4.9 Conclusion 117
Algorithm 4.2: Gradient-Constrained Discounted Steiner Point Algorithm(GCDSPA).
Input: V1, V2, C, D, d, maximum gradient m and locations of p0, p1, p2Output: The optimal labelling (G) and NPV (N PV), the location of the discounted
Steiner point.1 Step 1
Assume the optimal labelling G has at least two m-edges.The discounted Steiner point is obtained from Theorems 4.6, 4.7, 4.8 and thecorresponding NPV is calculated.
2 Then the labelling which provides the maximum NPV is recorded as (G1,NPV1).The labelling G1 is one of the labelling mmm, mmm, mmm, bmm, mmb, mbm, mm f ,mm f , m f m, f mm, m f m, f mm.
3 Step 2Assume the optimal labelling G has one m-edge.The discounted Steiner point is obtained from Theorems 4.9, 4.10 and thecorresponding NPV is calculated.
4 Then the labelling which provides the maximum NPV is recorded as (G2,NPV2).The labelling G2 is one of the labelling m f b, f mb, f f m, f f m, f f m, f m f , f m f , m f f .
5 Step 3Assume the optimal labelling G has no m-edges.The discounted Steiner point is obtained from Theorems 4.11, 4.12 and thecorresponding NPV is calculated.
6 Then the labelling which provides the maximum NPV is recorded as (G3,NPV3).The labelling G3 is one of the labelling f f f , f f f , f f f , f f b.
7 Step 4Assume the optimal labelling G has only two edges.The discounted Steiner point degenerate cases are considered and thecorresponding NPV.
8 Then the labelling which provides the maximum NPV is recorded as (G4,NPV4).9 The optimal N PV = max (NPV1,NPV2,NPV3,NPV4).
10 The optimal labelling G = Gi which provides max (NPV1,NPV2,NPV3,NPV4).
maximise the NPV [53].
When two resource points are below the discounted Steiner point the labellings f f f ,
f f m, m f m, mm f , mmm, m f f or bmm are feasibly optimal. When only the first extraction
point is below the discounted Steiner point the labellings f f f , f f m, f m f , f mm, mm f ,
mmm, mbm are feasibly optimal. When only the second extraction point is below the
discounted Steiner point the labellings mmm, mmb, m f b, m f m, f mb, f mm, f m f , f f b,
f f m, f f f are feasibly optimal. A greater range of optimal labellings is possible in a
gradient-constrained discounted Steiner tree compared to the gradient-constrained min-

118Optimally locating a single discounted Steiner point in the presence of a gradient
constraint
imum Steiner tree. The Gradient-Constrained Discounted Point Algorithm (GCDSPA) is
proposed to optimally locate the discounted Steiner point by considering all the feasibly
optimal labellings [54].

Chapter 5
Optimally locating multiplediscounted Steiner points
THIS chapter describes a way of locating two discounted Steiner points when a mine
is being operated with a single face and without considering the gradient constraint.
The 1-face discounted Steiner point algorithm is extended to locate two junction points.
The Extension of the 1-Face Discounted Steiner Point Algorithm (E1FDSPA) is proposed
for the scenario of a network with two junction points. The E1FDSPA is further im-
proved to locate two junction points based on the layouts. Three algorithms, E1FDSPAa,
E1FDSPAb, E1FDSPAc, are proposed to optimally locate two junction points for three
different layouts. Numerical trials show that these algorithms work well.
5.1 Introduction
Algorithms have been developed to locate multiple Steiner points to minimise the total
length of a network. The basic properties of such networks are that a Steiner point must
meet three edges and there are at most n− 2 Steiner points for a network with n nodes
where n ≥ 3 [42].
The Steiner problem is also called the Steiner minimal tree (SMT) problem because
it seeks a shortest tree that connects every node in a given network [44]. A layout is a
configuration of terminal points and Steiner points where the connections are specified
but the locations of the Steiner points are not [42]. Finding the layout of a minimum net-
work containing a single Euclidean Steiner point is not a difficult problem as only a few
layouts need to be considered. However, finding the topology of a minimum network
119

120 Optimally locating multiple discounted Steiner points
connecting n points is an NP-hard problem [55].
The problem to be analysed is different from the one discussed in [42] as the Steiner
points are located to maximise the NPV. If the discount rate is zero, then the problem
is reduced to the classical Steiner problem. The NPV depends on where the junctions
are placed in the network. In Chapter 3, an iterative approach for locating a single dis-
counted Steiner point was described. The 1FDSPA algorithm will be extended to locate
two discounted Steiner points in a given network layout.
In Section 5.2, the possible network layouts that can occur in a network with two dis-
counted Steiner points are presented. The 1FDSPA algorithm is extended and modified
to locate two discounted Steiner points in Sections 5.3, 5.4, 5.5. The difficulty of obtaining
a generalised algorithm for locating multiple discounted Steiner points is explained in
Section 5.6. Finally, in Section 5.7 numerical trials have been carried out to locate two
discounted Steiner points to maximise the NPV.
5.2 Iterative algorithm to locate two discounted Steiner points
Let p0 = (x0, y0, z0), p1 = (x1, y1, z1), p2 = (x2, y2, z2), p3 = (x3, y3, z3) be points in an
underground mine where the point p0 is a surface portal (or breakout point from existing
infrastructure) and the points p1, p2, p3 are the drawpoints for ore deposits with values
$V1, $V2, $V3 respectively, as shown in Fig. 5.1. The objective is to locate two discounted
Steiner points (junction points) s1 = (xs1 , ys1 , zs1) and s2 = (xs2 , ys2 , zs2) to maximise the
NPV when the mine is being operated with a single face and the gradient constraint is
not active in the network.
Figure 5.1: Locating two discounted Steiner points

5.2 Iterative algorithm to locate two discounted Steiner points 121
The decline links p0s1, s1 p1, s1s2, s2 p2 and s2 p3 are constructed one at a time. The
order of the access construction process for the mine illustrated in Fig. 5.1 is p0s1 →
s1 p1 → s1s2 → s2 p2 → s2 p3. Because of this, there will be 3 different layouts that need to
be considered in this problem. Hence, the problem is complex and harder to solve even
with two discounted Steiner points. A discounted Steiner network with four given points
has three possible network layouts as shown in Fig. 5.2. In this figure:
Layout L2a - the point s1 is connected to p3 and the point s2 is connected to p1 and p2.
Layout L2b - the point s1 is connected to p1 and the point s2 is connected to p2 and p3.
Layout L2c - the point s1 is connected to p2 and the point s2 is connected to p1 and p3.
Figure 5.2: Basic layouts for a network with two discounted Steiner points
The new algorithms are proposed to locate two discounted Steiner points for Lay-
outs L2a, L2
b, L2c in Sections 5.3, 5.4, 5.5 respectively. The order of reaching access points
p1, p2, p3 changes according to the layouts thus adding time delays to the construction of
the corresponding decline links. Therefore, the 1FDSPA is modified to account for these
time delays as described in the next section.
5.2.1 Problem modification to account for the time delays in the network
The research problem is modified to account for any known time delays td1 , td2 before
reaching p0 and after reaching the point p1 respectively, as shown in Fig. 5.3. Such a
network with the time delays will be called a time delayed discounted Steiner network. The
objective function is formulated to account for these time delays.
Lemma 5.1. In a time delayed discounted Steiner network, the cash flows generated from resource
extraction with one development face are given by NPVdext where,
NPVdext = V1r−td1 r−(l0+l1)/D + V2r−(td1
+td2 )r−(l0+l1+l2)/D

122 Optimally locating multiple discounted Steiner points
Figure 5.3: New problem to account for time delays in the network
Proof. Before starting the project there is a time delay of td1 . The resource (ore) at the
point p1 is extracted before p2 and there is a time delay td2 before reaching the point p2.
Therefore, the total time taken to reach the points p1, p2 is td1 + t0 + t1 and td1 + t0 +
t1 + td2 + t2 respectively, where t0 = l0/D, t1 = l1/D, t2 = l2/D. The cash flow sum
generated from the ore extraction is given by
NPVdext = V1r−(td1
+t0+t1) + V2r−(td1+t0+t1+td2+t2) (5.1)
By substituting the values t0, t1, t2 into Eq. (5.1) gives the result.
Lemma 5.2. In a time delayed discounted Steiner network, the cash flows generated from access
construction with one development face are given by NPVdcon where,
NPVdcon = Vcr−td1
(1− r−(l0+l1)/D(1− r−td2 )− r−td2 r−(l0+l1+l2)/D
)
Proof. The decline links p0s, sp1, sp2 need to be constructed sequentially. The decline link
sp2 is constructed after a time delay td2 at p1. These costs can be calculated using Theorem
3.1.
NPVdcon = r−td1
∫ l0
0Cr−x/Ddx + r−td1 r−l0/D
∫ l1
0Cr−x/Ddx + r−(td1
+td2)r−(l0+l1)/D
∫ l2
0Cr−x/Ddx
NPVdcon = Vcr−td1
(1− r−(l0+l1)/D(1− r−td2 )− r−td2 r−(l0+l1+l2)/D
)
Theorem 5.1. In a time delayed discounted Steiner network with one face being developed at a

5.2 Iterative algorithm to locate two discounted Steiner points 123
time, the NPV is given by,
NPVd =
(V1 + Vc(1− r−td2 )
)r−td1 r−(l0+l1)/D + (V2 + Vc)r−(td1
+td2 )r−(l0+l1+l2)/D −Vcr−td1
Proof. The total NPV is the combination of cash flows generated from the ore extraction
and access construction costs. Hence,
NPVd = NPVdext + NPVd
con
NPVd = V1r−td1 r−(l0+l1)/D + V2r−(td1+td2 )r−(l0+l1+l2)/D
− Vcr−td1
(1− r−(l0+l1)/D(1− r−td2 )− r−td2 r−(l0+l1+l2)/D
)NPVd =
(V1 + Vc(1− r−td2 )
)r−td1 r−(l0+l1)/D + (V2 + Vc)r−(td1
+td2 )r−(l0+l1+l2)/D
− Vcr−td1 (5.2)
Lemma 5.3. The objective function in a time delayed discounted Steiner network has the same
form as the network without time delays except the constants. Therefore, the same optimisation
techniques can be used to locate the discounted Steiner point in a time delayed network.
Proof. The objective function given in Eq. (5.2) can be rewritten,
NPVd =
(V1 + Vc(1− r−td2 )
)r−td1 r−(l0+l1)/D + (V2 + Vc)r−(td1
+td2 )r−(l0+l1+l2)/D −Vcr−td1
NPVd = V1r−(l0+l1)/D + (V2 + Vc)r−(l0+l1+l2)/D − Vcrtd2 (5.3)
where V1 =
(V1 + Vc(1− r−td2 )
)r−td1 , V2 = V2r−(td1
+td2 ), Vc = Vcr−(td1+td2 ).
The objective function given in Eq. (5.3) is similar to the objective function that was
analysed in Chapter 3 with modified values to the parameters. The only difference is the
constants V1, V2, Vc have been changed and that does not affect the optimisation.
Corollary 5.1. The 1-face discounted Steiner point algorithm can be used to locate the discounted
Steiner point in a time delayed discounted Steiner network.

124 Optimally locating multiple discounted Steiner points
Proof. Corollary 5.1 follows from Lemma 5.3.
The notation 1FDSPA(4p0 p1 p2, V1, V2) is used when the algorithm is recalled in the
steps, where p0 = (x0, y0, z0), p1 = (x1, y1, z1), p2 = (x2, y2, z2) are the surface portal (or
breakout point from existing infrastructure) and the access points for ore deposits with
values $V1 and $V2 respectively. The values V1 and V2 are given in Lemma 5.3. In the first
iteration of the 1FDSPA, the discounted Steiner point needs be initialised at the classical
Steiner point.
The parameters defined below are used throughout this chapter.
si1 and si
2 - the locations of the first and second discounted Steiner points in the ith iteration
respectively.
Vis - the aggregated discounted value in the ith iteration at the second discounted Steiner
point si2.
li0 - length from si
1 to p0 in the ith iteration.
li1 - length from si
1 to p1 in the ith iteration.
li12 - length from si
1 to si2 in the ith iteration.
li2 - length from si
2 to p2 in the ith iteration.
li3 - length from si
2 to p3 in the ith iteration.
(xisk
, yisk
, zisk) - the coordinates of the kth discounted Steiner point in the ith iteration k =
1, 2.
NPV(0) - the NPV is obtained placing the discounted Steiner points at their classical
locations.
d - discount rate % p.a.
D - development rate m p.a.
C - cost rate $/m
r = 1 + d, Vc = CD/ ln r
5.2.2 Value aggregation
In some cases before applying the 1FDSPA, the value at the discounted Steiner point
needs to be calculated and that value is defined as the aggregated value. The aggregated

5.3 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
a 125
value at the discounted Steiner point is written in terms of the discounted values at the
adjacent nodes in the network which connect with the corresponding discounted Steiner
point.
Theorem 5.2. Suppose the discounted Steiner point s is connected to two vertices p2 and p3 with
values V2 and V3 respectively. Then the aggregated value Vs at the point s is given by,
Vs = V2r−l2/D + (V3 + Vc)r−(l2+l3)/D −Vc (5.4)
Proof. Let the discounted Steiner point s be connected to two vertices p2 and p3 with
values V2 and V3 respectively, as shown in Fig. 5.4. The distances l2, l3 are the Euclidean
distances from s to p2 and s to p3 respectively. The point p2 is accessed before reaching
p3.
Figure 5.4: Aggregated value at the discounted Steiner point
The aggregated value Vs at s can be written considering the cash flows generated from
the ore production and access construction costs and is given by,
Vs = V2r−l2/D + V3r−(l2+l3)/D −∫ l2+l3
0Cr−x/Ddx
= V2r−l2/D + (V3 + Vc)r−(l2+l3)/D −Vc
5.3 Extension of the 1-Face Discounted Steiner Point Algorithmto locate two discounted Steiner points for Layout L2
a
In this section, Extension of the 1-Face Discounted Steiner Point Algorithm (E1FDSPAa)
is proposed to locate two discounted Steiner points for Layout L2a shown in Fig. 5.2. The

126 Optimally locating multiple discounted Steiner points
NPV needs to be calculated for Layout L2a as below.
5.3.1 Calculation of the total NPV for Layout L2a
Figure 5.5: The NPV calculations for Layout L2a
In Fig. 5.5, for Layout L2a, cash flow sum generated from the ore extraction is given
by,
NPVL2a
ext = V1r−(t0+t12+t1) + V2r−(t0+t12+t1+t2) + V3r−(t0+t12+t1+t2+t3) (5.5)
By substituting the values t0 = l0/D, t12 = l12/D, t1 = l1/D, t2 = l2/D, t3 = l3/D into
Eq. (5.5),
NPVL2a
ext = V1r−(l0+l12+l1)/D + V2r−(l0+l12+l1+l2)/D + V3r−(l0+l12+l1+l2+l3)/D
The decline links p0s1, s1s2, s2 p1, s2 p2, s1 p3 need to be constructed sequentially. These
costs can be calculated using Theorem 3.1.
NPVL2a
con =∫ l0
0Cr−x/Ddx + r−l0/D
∫ l12
0Cr−x/Ddx + r−(l0+l12)/D
∫ l1
0Cr−x/Ddx
+r−(l0+l12+l1)/D∫ l2
0Cr−x/Ddx + r−(l0+l12+l1+l2)/D
∫ l3
0Cr−x/Ddx
NPVL2a
con =Vc(1− r−(l0+l12+l1+l2+l3)/D)
Since the construction is a cost, cash flows generated from access construction have a
negative value. The total NPV is the combination of cash flows generated from ore pro-

5.3 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
a 127
duction and access construction costs. Hence,
NPVL2a = NPVL
2a
ext + NPVL2a
con
NPVL2a = V1r−(l0+l12+l1)/D + V2r−(l0+l12+l1+l2)/D + (V3 + Vc)r−(l0+l12+l1+l2+l3) −Vc (5.6)
5.3.2 Algorithm to locate two discounted Steiner points for Layout L2a
The steps of an algorithm for optimally locating two discounted Steiner points are ex-
plained. Steps 1 and 2 are described by considering the first iteration.
Iteration (i = 1) - Step 1
Figure 5.6: Step 1 for Layout L2a
The first discounted Steiner point s1 is initialised at the classical location s01. Therefore,
the distance l10 can be calculated,
l10 =
√(x0
s1− x0)2 + (y0
s1− y0)2 + (z0
s1− z0)2
This distance will change in each iteration as the location of the first discounted Steiner
point (xis1
, yis1
, zis1) changes. Before reaching the point s0
1 there is a time delay td1 in the
network where td1 = l10/D. There is no time delay for reaching p2 after reaching p1 and
so td2 = 0. According to Corollary 5.1 this step can be written
1FDSPA(4s1 p1 p2, V1r−l10 /D, V2r−l1
0 /D).

128 Optimally locating multiple discounted Steiner points
Figure 5.7: Step 2 for Layout L2a
Iteration (i = 1) - Step 2
The idea is to use the 1FDSPA to determine the new location of the first discounted Steiner
point. The distances l11 , l1
2 were found in the previous step. The aggregated value V1s at
the point s2 can be calculated using Theorem 5.2,
V1s = V1r−l1
1 /D + (V2 + Vc)r−(l11+l1
2)/D −Vc
This aggregated value changes in each iteration as the distances l1, l2 change. There is
no initial delay in the network so td1 = 0. However, the decline link s11 p3 is constructed
after reaching the points p1 and p2. Therefore, a time delay td2 needs be considered where
td2 = (l11 + l1
2)/D. According to Corollary 5.1 this step can be simplified to
1FDSPA(4p0s12 p3, V1
s + Vc(1− r−(l11+l1
2)/D), V3r−(l11+l1
2)/D).
The Steps 1 and 2 are repeated till |NPV(i) − NPV(i − 1)| < ε which is the NPV
difference of the ith and the (i− 1)th iteration. This NPV is calculated using Eq. (5.6).
The steps above can be expressed in Algorithm 5.1. The Extension of the 1-Face Dis-
counted Steiner Point Algorithm-1 (E1FDSPAa) can be used to locate two discounted
Steiner points for Layout L2a.
Note that for the other layouts the procedure will be the same. However, in Steps 1 and
2, the 1FDSPA is applied to different triangles and their corresponding values which are
discussed in the following sections.

5.4 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
b 129
Algorithm 5.1: Extension of the 1-Face Discounted Steiner Point Algorithm(E1FDSPAa) to Locate Two Discounted Steiner Points in Layout L2
a
Input: V1, V2, V3, discount rate, development and cost rate of the declines, andlocations of p0, p1, p2, p3 and ε.
Output: Optimal locations of two discounted Steiner points and the maximumNPV.
1 Initialisation: s01 at the classical location, NPV(0).
2 i = 13 repeat4 Step 15 Calculate:
li0 =
√(xi−1
s1 − x0)2 + (yi−1s1 − y0)2 + (zi−1
s1 − z0)2
Locate si2 by applying the 1FDSPA(4si−1
1 p1 p2, V1r−li0/D, V2r−li
0/D)6 Step 27 Update the aggregated value:
Vis = V1r−li
1/D + (V2 + Vc)r−(li1+li
2)/D −Vc
Locate si1 by applying the 1FDSPA(4p0si
2 p3, Vis + Vc(1− r−(l
i1+li
2)/D),V3r−(l
i1+li
2)/D)8 Calculate NPV(i) using Eq. (5.6)9 i = i + 1
10 until |NPV(i)− NPV(i− 1)| < ε
11 Outputs are the optimal locations of the discounted Steiner points s∗2 = si2, s∗1 = si
1and NPV∗ = NPV(i)
5.4 Extension of the 1-Face Discounted Steiner Point Algorithmto locate two discounted Steiner points for Layout L2
b
Extension of the 1-Face Discounted Steiner Point Algorithm (E1FDSPAb) is proposed to
locate two discounted Steiner points for Layout L2b shown in Fig. 5.2.
5.4.1 Calculation of the total NPV for Layout L2b
The NPV needs to be calculated for Layout L2b as below. In Fig. 5.8, for Layout L2
b, cash
flow sum generated from the ore extraction is given by
NPVL2b
ext = V1r−(t0+t1) + V2r−(t0+t1+t12+t2) + V3r−(t0+t1+t12+t2+t3) (5.7)

130 Optimally locating multiple discounted Steiner points
Figure 5.8: The NPV calculations for Layout L2b
By substituting the values t0 = l0/D, t12 = l12/D, t1 = l1/D, t2 = l2/D, t3 = l3/D into
Eq. (5.7),
NPVL2b
ext = V1r−(l0+l1)/D + V2r−(l0+l1+l12+l2)/D + V3r−(l0+l1+l12+l2+l3)/D
The decline links p0s1, s1 p1, s1s2, s2 p2, s2 p3 need to be constructed sequentially. These
costs can be calculated using Theorem 3.1.
NPVL2b
con =∫ l0
0Cr−x/Ddx + r−l0/D
∫ l1
0Cr−x/Ddx + r−(l0+l1)/D
∫ l12
0Cr−x/Ddx
+ r−(l0+l12+l1)/D∫ l2
0Cr−x/Ddx + r−(l0+l12+l1+l2)/D
∫ l3
0Cr−x/Ddx
NPVL2b
con = Vc(1− r−(l0+l12+l1+l2+l3)/D)
Since the construction is a cost, cash flows generated from access construction have a neg-
ative value. The total NPV is the combination of cash flows generated from ore extraction
and access construction costs. Hence,
NPVL2b = NPVL
2b
ext + NPVL2b
con
NPVL2b = V1r−(l0+l1)/D + V2r−(l0+l1+l12+l2)/D + (V3 + Vc)r−(l0+l12+l1+l2+l3) −Vc(5.8)
The total NPV obtained above can be used to calculate the NPV in each iteration. If the
NPV difference of the consecutive iterations is very small then the iterative approach can
be stopped.

5.4 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
b 131
5.4.2 Algorithm to locate two discounted Steiner points for Layout L2b
The steps of an algorithm for optimally locating two discounted Steiner points for Layout
L2b are explained. Steps 1 and 2 are described by considering the first iteration.
Iteration (i = 1) - Step 1
Figure 5.9: Step 1 for Layout L2b
The first discounted Steiner point s01 is initialised at the classical location so the dis-
tances l10 , l1
1 can be calculated as below.
l10 =
√(x1
s1− x0)2 + (y1
s1− y0)2 + (z1
s1− z0)2
l11 =
√(x1
s1− x1)2 + (y1
s1− y1)2 + (z1
s1− z1)2
These distances will change in each iteration as the location of the first discounted Steiner
point (xis1
, yis1
, zis1) changes. The idea is to apply the 1FDSPA to locate the second dis-
counted Steiner point s12. There is a time delay td1 before reaching the point s0
1 where
td1 = (l10 + l1
1)/D and td2 = 0. Therefore, according to Corollary 5.1 this step can be
written as 1FDSPA(4s01 p2 p3, V2r−(l
10+l1
1)/D, V3r−(l10+l1
1)/D).
Iteration (i = 1) - Step 2
The idea is to use the 1FDSPA to determine the new location of the first discounted Steiner
point s11. The distances l1
2 , l13 were found in the previous step. The aggregated value V1
s at

132 Optimally locating multiple discounted Steiner points
Figure 5.10: Step 2 for Layout L2b
the point s2 can be calculated using Theorem 5.2,
V1s = V2r−l1
2 /D + (V3 + Vc)r−(l12+l1
3)/D −Vc
In this step there are no time delays in the network and hence td1 = td2 = 0. Therefore,
the 1FDSPA can be applied in Step 2 which can be written as 1FDSPA(4p0s12 p1, V1, V1
s ).
Similarly, Steps 1 and 2 are repeated till |NPV(i)−NPV(i− 1)| < ε which is the NPV
difference of the ith and the (i− 1)th iteration. This NPV is calculated using Eq. (5.8).
The steps above can be expressed in Algorithm 5.2. The Extension of the 1-Face Dis-
counted Steiner Point Algorithm-2 (E1FDSPAb) can be used to locate two discounted
Steiner points for Layout L2b.
5.5 Extension of the 1-Face Discounted Steiner Point Algorithmto locate two discounted Steiner points for Layout L2
c
In this section, Extension of the 1-Face Discounted Steiner Point Algorithm (E1FDSPAc)
is proposed to locate two discounted Steiner points for Layout L2c shown in Fig. 5.2.
5.5.1 Calculation of the total NPV for Layout L2c
For the Layout L2c shown in Fig. 5.11, the times taken to reach the points p1, p2, p3 are
exactly the same as in Layout L2a. Therefore, the total NPV is same as the NPV obtained

5.5 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
c 133
Algorithm 5.2: Extension of the 1-Face Discounted Steiner Point Algorithm(E1FDSPAb) to Locate Two Discounted Steiner Points in Layout L2
b
Input: V1, V2, V3, discount rate, development and cost rate of the declines, andlocations of p0, p1, p2, p3 and ε.
Output: Optimal locations of two discounted Steiner points and the maximumNPV.
1 Initialisation: s01 at the classical location, NPV(0).
2 i = 13 repeat4 Step 15 Calculate:
li0 =
√(xi−1
s1 − x0)2 + (yi−1s1 − y0)2 + (zi−1
s1 − z0)2
li1 =
√(xi−1
s1 − x1)2 + (yi−1s1 − y1)2 + (zi−1
s1 − z1)2
Locate si2 by applying the 1FDSPA(4si−1
1 p2 p3, V2r−(li0+li
1)/D, V3r−(li0+li
1)/D)6 Step 27 Update the aggregated value:
Vis = V2r−li
2/D + (V3 + Vc)r−(li2+li
3)/D −Vc
Locate si1 by applying the 1FDSPA(4p0si
2 p1, V1, Vis )
8 Calculate NPV(i) using Eq. (5.8)9 i = i + 1
10 until |NPV(i)− NPV(i− 1)| < ε
11 Outputs are the optimal locations of the discounted Steiner points s∗2 = si2, s∗1 = si
1and NPV∗ = NPV(i)
Figure 5.11: The NPV calculations for Layout L2c
in Eq. (5.6). Hence,
NPVL2c = V1r−(l0+l12+l1)/D + V2r−(l0+l1+l12+l2)/D + (V3 + Vc)r−(l0+l12+l1+l2+l3) −Vc

134 Optimally locating multiple discounted Steiner points
The total NPV above can be used to calculate the NPV in each iteration. If the NPV
difference of the consecutive iterations is very small then the iterative approach can be
stopped.
5.5.2 Algorithm to locate two discounted Steiner points for Layout L2c
The steps of an algorithm for optimally locating two discounted Steiner points for Layout
L2c are explained. Steps 1 and 2 are described by considering the first iteration.
Iteration (i = 1) - Step 1
Figure 5.12: Step 1 for Layout L2c
The first discounted Steiner point s01 is initialised at the classical location so the dis-
tances l10 , l1
2 can be calculated as below.
l10 =
√(x0
s1− x0)2 + (y0
s1− y0)2 + (z0
s1− z0)2
l12 =
√(x0
s1− x2)2 + (y0
s1− y2)2 + (z0
s1− z2)2
The idea is to apply the 1FDSPA to locate the second discounted Steiner point s12. There
is a time delay td1 before reaching the point s01 where td1 = l1
0/D. Before constructing the
decline link s12 p3 there is a time delay of td2 where td2 = l1
2/D. According to Corollary 5.1
this step can be simplified to
1FDSPA(4s01 p1 p3, V1r−l1
0 /D + Vcr−l10 /D(1− r−l1
2 /D), V3r−(l10+l1
2)/D).

5.5 Extension of the 1-Face Discounted Steiner Point Algorithm to locate twodiscounted Steiner points for Layout L2
c 135
Iteration (i = 1) - Step 2
Figure 5.13: Step 2 for Layout L2c
The idea is to use the 1FDSPA to determine the new location of the first discounted
Steiner point s1. The distances l12 , l1
1 , l13 were found in the previous step. The aggregated
value V1s at the point s2 can be calculated using Theorem 5.2.
V1s = V1r−l1
1 /D −∫ l1
1
0Cr−x/Ddx + V3r−(l
11+l1
2+l13)/D − r−(l
11+l1
2)/D∫ l1
3
0Cr−x/Ddx
V1s = (V1 + Vc)r−l1
1 /D −Vc + (V3 + Vc)r−(l11+l1
2+l13)/D −Vcr−(l
11+l1
2)/D
V1s = (V1 + Vc)r−l1
1 /D + (V3 + Vc)r−(l11+l1
2+l13)/D −Vc(r−(l
11+l1
2)/D + 1) (5.9)
There is no initial delay before reaching the point p0 and so td1 = 0. However, the decline
link s11 p2 is constructed after reaching the point p1. Therefore, a time delay td2 needs be
considered where td2 = l11/D. According to Corollary 5.1 this step can be written as
1FDSPA(4p0s12 p2, V1
s + Vc(1− r−l11 /D), V2r−l1
1 /D).
Similarly, the Steps 1 and 2 are repeated till |NPV(i)− NPV(i− 1)| < ε which is the
NPV difference of the ith and the (i− 1)th iteration. This NPV is calculated using Eq. (5.6).
The steps above can be expressed in Algorithm 5.3. The Extension of the 1-Face Dis-
counted Steiner Point Algorithm-3 (E1FDSPAc) can be used to locate two discounted
Steiner points for Layout L2c .

136 Optimally locating multiple discounted Steiner points
Algorithm 5.3: Extension of the 1-Face Discounted Steiner Point Algorithm(E1FDSPAc) to Locate Two Discounted Steiner Points in Layout L2
c
Input: V1, V2, V3, discount rate, development and cost rate of the declines, andlocations of p0, p1, p2, p3 and ε.
Output: Optimal locations of two discounted Steiner points and the maximumNPV.
1 Initialisation: s01 at the classical location, NPV(0).
2 i = 13 repeat4 Step 15 Calculate:
li0 =
√(xi−1
s1 − x0)2 + (yi−1s1 − y0)2 + (zi−1
s1 − z0)2
li2 =
√(xi−1
s1 − x2)2 + (yi−1s1 − y2)2 + (zi−1
s1 − z2)2
Locate si2 by applying the 1FDSPA(4si−1
1 p1 p3, V1r−li0/D + Vcr−li
0/D(1− r−li2/D),
V3r−(li0+li
2)/D)6 Step 27 Update the aggregated value:
Vis = (V1 + Vc)r−li
1/D + (V3 + Vc)r−(li1+li
2+li3)/D −Vc(r−(l
i1+li
2)/D + 1)
Locate si1 by applying the 1FDSPA(4p0si
2 p2, Vis + Vc(1− r−li
1/D), V2r−li1/D)
8 Calculate NPV(i) using Eq. (5.6)9 i = i + 1
10 until |NPV(i)− NPV(i− 1)| < ε
11 Outputs are the optimal locations of the discounted Steiner points s∗2 = si2, s∗1 = si
1and NPV∗ = NPV(i)
5.6 Further improvement to locate multiple discounted Steinerpoints
As seen in Sections 5.3, 5.4 and 5.5 the 1FDSPA can be extended to locate two discounted
Steiner points. It is hard to generalise this algorithm to an algorithm that works for op-
timally locating more than two discounted Steiner points due to a number of reasons.
The main reason is that the number of possible layouts increases with the number of dis-
counted Steiner points. For any given problem, the drawpoints could lie in anywhere
in the three-dimensional space and because of that the order for reaching to these draw-
points will change the triangles and values that are assigned to the 1FDSPA. However,

5.7 Numerical trials 137
for a given layout it is easy to simplify and provide an algorithm to locate two discounted
Steiner points as the order for reaching the ore deposits is known. Secondly, when con-
structing the access network for some layouts the links breaking times need to be consid-
ered hence the 1FDSPA cannot be directly applied and it needs to be modified according
to the layout. These break times of the decline links generate the time delays in the net-
work. Thirdly, the total NPV of the network depends on the topology of the layout. For
these reasons, it is difficult to generalise an algorithm for optimally locating more dis-
counted Steiner points.
In the next section, the E1FDSPAa, E1FDSPAb, E1FDSPAc is applied for Layouts
L2a,L2
b,L2c respectively, and the optimal locations of the discounted Steiner points are ob-
tained. These numerical trials suggest that the E1FDSPAa and the E1FDSPAb converge
rapidly.
5.7 Numerical trials
These values are used in the numerical trials.
V1 = $60M, V2= $20M, V3 = $5M, C = $6000/m, D = 3640 m. p.a
p0 = (0, 1000, 1000), p1 = (0, 0, 0), p2 = (1000, 1000, 0) and p3 = (1000, 1750, 750).
d = 0, 5, 10, ∞ % p.a
The E1FDSPAa and the E1FDSPAb, the E1FDSPAc are applied for Layouts L2a,L2
b,L2c
respectively, and the optimal locations of the two discounted Steiner points are obtained
for a range of discount rates. As shown in Figs. 5.14, 5.15, 5.16 for higher discount rates p1
and p2 are accessed sooner as the distances from s to these points increase. Tables 5.1, 5.2,
5.3 show the improvement of the NPV compared with the network where the two Steiner
points are at the classical Steiner locations. The discounted Steiner point algorithm gives
an improvement for all finite discount rates and greater improvements as the discount
rate increases.

138 Optimally locating multiple discounted Steiner points
Figure 5.14: The optimal locations of the discounted Steiner points in Layout L2a
Discount Optimal location of the NPV with E1 NPV without E1 Improverate (% p.a) discounted Steiner points -FDSPAa ($M) -FDSPAa ($M) -ment ($)
5 s1 = (317, 796, 479), s2 = (768, 1181, 413) 70.996 70.938 58000
10 s1 = (338, 839, 501), s2 = (755, 1167, 394) 69.443 69.293 150000
Table 5.1: Improvement of the NPV for Layout L2a
Figure 5.15: The optimal locations of the discounted Steiner points in Layout L2b
5.8 Conclusion
The 1-Face Discounted Steiner Point Algorithm is extended to locate two discounted
Steiner points. The extension of the 1-face discounted Steiner point algorithm is applied

5.8 Conclusion 139
Discount Optimal location of the NPV with E1 NPV without E1 Improverate (% p.a) discounted Steiner points -FDSPAb ($M) -FDSPAb ($M) -ment ($)
5 s1 = (242, 666, 424), s2 = (777, 1170, 393) 68.513 68.494 19000
10 s1 = (213, 623, 410), s2 = (772, 1145, 373) 67.257 67.192 65000
Table 5.2: Improvement of the NPV for Layout L2b
Figure 5.16: The optimal locations of the discounted Steiner points in Layout L2c
Discount Optimal location of the NPV with E1 NPV without E1 Improverate (% p.a) discounted Steiner points -FDSPAc ($M) -FDSPAc ($M) -ment ($)
5 s1 = (307, 765, 458), s2 = (766, 1163, 397) 70.915 70.903 12000
10 s1 = (325, 790, 465), s2 = (752, 1134, 382) 69.237 69.228 9000
Table 5.3: Improvement of the NPV for Layout L2c
to a hypothetical mine data-set and the performance is evaluated. The algorithm pro-
vides higher NPV compared with the placement of the discounted Steiner points at the
classical positions. The difficulty of developing a general algorithm for the scenario of a
network with more discounted Steiner points is discussed. The numerical trials suggest
that the E1FDSPAa, the E1FDSPAb and the E1FDSPAc converge rapidly. However, the
convergence is hard to show mathematically.


Chapter 6
Case study
IN this chapter, the gradient-constrained discounted Steiner point algorithm is applied
to a real underground mine. Rubicon and Hornet mines, which are part of the Kun-
dana series of mines, are situated in Western Australia. The aim is to design an under-
ground connector between Rubicon and Hornet so as to maximise the NPV associated
with that connector. The connector will break out from the access infrastructure of Ru-
bicon and extend to Hornet. The Gradient-Constrained Discounted Steiner Point Algo-
rithm (GCDSPA), developed in Chapter 4, is used to obtain the optimal location of the
junction point on the connector and the corresponding NPV.
6.1 Introduction
Kundana is located within 20km of Kalgoorlie, Australia as shown in Fig. 6.1. The Kun-
dana Mines have been in operation for over 20 years. The current operational mines
are Raleigh, Rubicon and Hornet with a recently discovered emerging goldfield which
has produced over 3.34Moz of Gold [3]. The geological distribution of these mines is
illustrated in Fig. 6.2. Ore bodies are typically narrow vein style mineralisation (1.0m
to 6.0m in width). Northern Star Resources (NSR) believes there are still deposits to be
discovered in this goldfield of a significant value.
141

142 Case study
Figure 6.1: Location of Kundana [3]
Figure 6.2: Kundana Mines [3]
6.2 Designing the Rubicon and Hornet connector
The Rubicon orebody is located beneath a previously mined open pit. Rubicon and Hor-
net are mined at depth less than 400m below surface. The Hornet orebody is located

6.2 Designing the Rubicon and Hornet connector 143
Figure 6.3: Stope layout of Rubicon and Hornet mines [3]
600m to the south of the Rubicon orebody. Access to the Hornet ore body is via a decline
(or connector) developed off the Rubicon decline. The grade distributions of the Rubicon
and Hornet ore bodies are shown in Fig. 6.3.
6.2.1 General aim
Figure 6.4: The Rubicon and Hornet Connector
The aim is to design an underground connector between Rubicon and Hornet so as
to maximise the NPV associated with that connector as shown in Fig. 6.4. The connector
will break out from the access infrastructure that existed at Rubicon in 2011, and extend
to Hornet. The connector has already been built and so the purpose of the case study is

144 Case study
to validate the model.
6.2.2 Inputs
• A set of potential breakout points on the existing Rubicon access.
• A set of drawpoints (one for each level) on Hornet and the coordinates, associated
tonnage and average grade of ore for each drawpoint.
• Other standard parameters such as cost rate ($/m) of constructing tunnels, rate
(m/day) of tunnel construction, maximum gradient and discount rate.
6.2.3 Assumptions
• The connector breaks out from one of the given set of breakout points on Rubi-
con, and connects to two adjacent drawpoints on Hornet, via a single junction (dis-
counted Steiner point). All possible pairs of adjacent drawpoints in Hornet will be
considered in the optimisation.
• Access to the other drawpoints on Hornet will be via maximum gradient declines
up or down from the drawpoints associated with the connector.
• The mines are being operated with a single development face. This is reasonable
since the jumbo continued to develop the access in Rubicon at the same time as
building the connector so it was not in danger of being idle.
• The curvature constraint is ignored. Again, this is reasonable, given the scale of the
distances involved.
• For each pair of adjacent drawpoints, the drawpoint with the higher aggregated
value is extracted first.
6.2.4 Anticipated outputs from the case study
• Optimal design of the connector, showing location of the junction and the choice of
breakout point and drawpoints.
• The optimal NPV associated with this design.

6.3 Case study data preparation 145
6.2.5 Data
The data for this case study is supplied by John Andrews, mine manager, Rubicon-
Hornet.
cost rate - 5000 $/m
development rate -140m /jumbo/month with a single heading
maximum gradient 1 in 7 decline
discount rate - 10 % p.a.
Tonnes and grade are from the original reserves when the connector was designed which
is shown in Table 6.2.
The coordinates of Rubicon breakout points and Hornet drawpoints are given in Tables
6.1 and 6.2 respectively.
Rubicon start points x y zR1 9833.374 16 185.869 6208.288R2 9839.279 16 179.883 6162.217R3 9831.543 16 185.044 6120.056R4 9824.143 16 174.721 6078.452
Table 6.1: A set of potential breakout points on the existing Rubicon access
6.3 Case study data preparation
In this section, the given data is processed such that it can be applied in the gradient-
constrained discounted Steiner point algorithm.
6.3.1 Calculation of the gross and net values
The gross gold value at each level of Hornet needs to be calculated first. For example the
way of calculating the gross value of 44 465 tonnes of gold with 4.96 average grade is as
follows:
Average gold = Tonnes × Average grade = 44 465× 4.96 = 220 546 grams

146 Case study
Hornet access x y z Tonnes Averagepoints tonnes grade (g/t)
5925 9820.620 15 517.796 5921.472 44 465 4.96
5945 9818.091 15 528.853 5943.130 41 381 7.05
5965 9840.623 15 531.109 5962.314 38 579 7.39
5985 9832.170 15 525.640 5983.492 42 745 8.33
6005 9838.951 15 516.830 6002.379 41 152 8.57
6025 9834.968 15 528.034 6023.395 32 099 10.34
6045 9842.123 15 511.853 6042.983 34 868 11.05
6065 9838.533 15 525.413 6063.707 38 983 11.39
6085 9841.863 15 504.792 6083.575 36 973 9.40
6105 9840.487 15 521.042 6104.712 35 223 8.12
6125 9846.451 15 501.936 6123.909 32 037 8.64
6145 9850.112 15 527.268 6144.418 28 732 7.65
6165 9853.493 15 501.562 6164.579 24 569 10.44
6185 9857.259 15 525.142 6184.610 18 415 10.09
6205 9863.145 15 500.162 6204.046 17 559 7.36
6225 9861.849 15 521.812 6224.877 15 460 7.17
6245 9878.129 15 504.200 6243.582 28 594 4.34
Table 6.2: A set of drawpoints (one for each level) on Hornet.
1 troy ounce = 31.1034768 g hence,
Total troy ounces in 220 546 grams of gold = 220 546/31.1034768 = 7 091 oz t
1 troy ounce = AUS 800 $ (given in the data). Therefore,
The gross value of 220 546g of gold = 7 091× 800 = $5 672 585
In order to find the net value, the other costs need to be deducted from this gross value.
The costs that need to be considered are milling cost $17.50 per tonne and administration
cost $5.00 per tonne. Maintenance costs are divided into underground road maintenance
costs $0.45 per tonne, fixed plant cost $2.42 per tonne, power and water supply costs

6.3 Case study data preparation 147
$1.98 per tonne.
The net value of 220 546g of gold = $5 672 585− 44 465(17.5 + 5 + 0.45 + 2.42 + 1.98)
= $4 456 467
Table 6.3 shows the gross and net values at each level of Hornet.
Hornet acess Gross Costs / $ Net
points value / $ Milling Admin Mainteance Value / $
5925 5 672 585 778 138 222 325 215 655 4 456 467
5945 7 503 625 724 168 206 905 200 698 6 371 855
5965 7 332 912 675 133 192 895 187 108 6 277 776
5985 9 158 226 748 038 213 725 207 313 7 989 151
6005 9 070 951 720 160 205 760 199 587 7 945 444
6025 8 536 760 561 733 160 495 155 680 7 658 853
6045 9 909 925 610 190 174 340 169 110 8 956 285
6065 11 420 366 682 203 194 915 189 068 10 354 181
6085 8 939 096 647 028 184 865 179 319 7 927 884
6105 7 356 368 616 403 176 115 170 832 6 393 019
6125 7 119 453 560 648 160 185 155 379 6 243 241
6145 5 653 382 502 810 143 660 139 350 4 867 562
6165 6 597 342 429 958 122 845 119 160 5 925 380
6185 4 779 076 322 263 92 075 89 313 4 275 426
6205 3 323 982 307 283 87 795 85 161 2 843 743
6225 2 851 082 2 705 50 77 300 74 981 2 428 251
6245 3 191 874 500 395 142 970 138 681 2 409 828
Table 6.3: Calculation of net values
6.3.2 Enumeration of cases
The data is organised such that the gradient-constrained discounted Steiner point algo-
rithm can be applied for the case study. For each of the four Rubicon breakout points
R1, R2, R3, R4, each of the 16 pairs of adjacent drawpoints is considered. Therefore, for

148 Case study
each Rubicon breakout point, 16 cases need to be considered which yields 64 cases alto-
gether for the complete problem. For each case, the discounted Steiner point could be
either above or below each of p0, p1 and p2. The cases are numbered starting from the
lowest level (z-coordinate) of Hornet mine.
6.3.3 Values aggregation
Figure 6.5: Values aggregation for Case 9
The values that are distributed in each level of Hornet need to be aggregated for the
two adjacent drawpoints as shown in Fig. 6.5. The coordinates of Hornet drawpoints
H1, H2...., H17 have gross values V1, V2...., V17 respectively. The value aggregations are
explained by considering Case 9. The aggregated value is calculated by discounting the
ore production and access construction costs of the Hornet decline to the corresponding
aggregated point. The gross values at the points H10..., H17 and the access construction
costs from H10 to H17 need to be aggregated to the point H10 and the gross values at the
points H1, H2..., H9 and the access construction costs from H1 to H9 need to be aggregated
to the point H9. All the values of the points below H9 are discounted at the aggregated
point H9. Similarly, all the values of the points above H10 are discounted at H10. It is

6.3 Case study data preparation 149
assumed that the points H1, H2..., H8 are connected with the point H9 by a single decline
with the maximum gradient. Similarly the points H11..., H17 are connected with the point
H10 by a single decline with the maximum gradient.
li is the distance from the point Hi to Hi+1 measured by the gradient metric.
li = |zHi+1 − zHi |√
1 + m−2 where m is the maximum gradient and zHi is the z-coordinate
of the ith Hornet drawpoint.
ti is the time taken to construct the decline link from the point Hi to Hi+1. ti = li/D where
D is the development rate m p.a.
C - cost rate $/m and d - discount rate % p.a., r = 1 + d
The aggregated value at the point H10 is Vx which can be expressed using Theorem 6.2,
Vx = V10 + V11r−t10 + V12r−(t10+t11) + V13r−∑12i=10 ti + V14r−∑13
i=10 ti + V15r−∑14i=10 ti
+ V16r−∑15i=10 ti + V17r−∑16
i=10 ti −∫ ∑16
i=10 li0 Cr−x/Ddx
Vx = V10 + V11r−l10/D + V12r−(l10+l11)/D + V13r−∑12i=10 li/D + V14r−∑13
i=10 li/D
+ V15r−∑14i=10 li/D + V16r−∑15
i=10 li/D + (V17 + Vc)r−∑16i=10 li/D −Vc (6.1)
The aggregated value at the point H9 is Vy which can be expressed using Theorem 6.2,
Vy = V9 + V8r−t8 + V7r−(t8+t7) + V6r−∑8i=6 ti + V5r−∑8
i=5 ti + V4r−∑8i=4 ti + V3r−∑8
i=3 ti
+ V2r−∑8i=2 ti + V1r−∑8
i=1 ti −∫ ∑8
i=1 li0 Cr−x/Ddx
Vy = V9 + V8r−l8/D + V7r−(l8+l7)/D + V6r−∑8i=6 li/D + V5r−∑8
i=5 li/D + V4r−∑8i=4 li/D
+ V3r−∑8i=3 li/D + V2r−∑8
i=2 li/D + (V1 + Vc)r−∑8i=1 li/D −Vc (6.2)
This same procedure is followed when calculating the aggregated values for the other
cases as shown in Table 6.4.

150C
asestudy
Cases
Hornet access pointsAggregated values
p1 p2
x1 y1 z1 x2 y2 z2 V1 / $ V2 / $
Case 1 9818.091 15 528.853 5943.130 9820.620 15 517.796 5921.472 84 143 041 4 456 467Case 2 9840.623 15 531.109 5962.314 9818.091 15 528.853 5943.130 78 959 226 10 027 362Case 3 9832.170 15 525.640 5983.492 9840.623 15 531.109 5962.314 74 053 506 15 552 612Case 4 9838.951 15 516.830 6002.379 9832.170 15 525.640 5983.492 67 237 096 22 664 608Case 5 9834.968 15 528.034 6023.395 9838.951 15 516.830 6002.379 60 539 806 29 773 745Case 6 9842.123 15 511.853 6042.983 9834.968 15 528.034 6023.395 53 993 391 36 442 735Case 7 9838.533 15 525.413 6063.707 9842.123 15 511.853 6042.983 46 148 845 44 423 953Case 8 9838.533 15 525.413 6063.707 9841.863 15 504.792 6083.575 53 680 676 36 786 340Case 9 9841.863 15 504.792 6083.575 9840.487 15 521.042 6104.712 60 482 767 29 854 678Case 10 9840.487 15 521.042 6104.712 9846.451 15 501.936 6123.909 65 620 957 24 324 373Case 11 9846.451 15 501.936 6123.909 9850.112 15 527.268 6144.418 70 684 681 18 958 598Case 12 9850.112 15 527.268 6144.418 9853.493 15 501.562 6164.579 74 250 954 14 921 152Case 13 9853.493 15 501.562 6164.579 9857.259 15 525.142 6184.610 78 868 310 9 779 405Case 14 9857.259 15 525.142 6184.610 9863.145 15 500.162 6204.046 81 807 157 6 256 818Case 15 9863.145 15 500.162 6204.046 9861.849 15 521.812 6224.877 83 331 043 4 161 217Case 16 9861.849 15 521.812 6224.877 9878.129 15 504.200 6243.582 84 380 955 2 409 828
Table 6.4: Aggregated values

6.4 Results 151
6.4 Results
In the optimisation each breakout point R1, R2, R3, R4 of Rubicon is considered with each
pair of adjacent Hornet drawpoints which yields 64 cases in total. The gradient-constrain
ed discounted Steiner point algorithm is applied for these 64 cases and the optimal la-
bellings, the optimal location of the junction point and the corresponding NPV are ob-
tained. In some cases, two labellings could be optimal and these are referred to as locally
optimal labellings in Tables 6.5, 6.6, 6.7, 6.8. Out of these locally optimal labellings the
one that provides the highest NPV is referred to as the globally optimal labelling.
The results can be verified by checking the gradients of the corresponding labellings
and these gradients are shown in the tables. The gradients g1, g2, g3 are measured at the
junction point with respect to the adjacent points p0, p1, p2 respectively.
For a b-edge gi > 0.1429 where i = 1, 2, 3
For an m-edge gi = 0.1429 where i = 1, 2, 3
For an f -edge gi < 0.1429 where i = 1, 2, 3
6.4.1 Breakout point at R1
In this scenario, the optimal locations of the junction point are obtained for 15 cases.
The points p0 (R1), p1 are above the point p2 for the cases 1-7. Therefore, the optimal
labellings mmm, mmb, m f b, m f m, f mb, f mm, f m f , f f b, f f m, f f f need to be considered
in these cases. The points p0 (R1), p2 are above the point p1 for the cases 8-14, therefore,
the optimal labellings mbm, mmm, mm f , f mm, f m f , f f m, f f f need to be considered in
these cases. The point p2 is above the points p0 (R1), p1 for the case 15.
As shown in Table 6.5, the optimal solution is given by Case 10 and the optimal la-
belling is mbm with the maximum NPV of $82 973 572. The point p2 is the optimal lo-
cation for the cases 12-15 which corresponds to the degenerate case of the discounted
Steiner point. Therefore, for these cases in the optimal configuration the points p0 and p2,
p2 and p1 are connected by a straight line and a zig-zag line respectively, to represent the
f and the b-edge.

152 Case study
Case 16 is not considered for two reasons. First, the Rubicon breakout point is below
the Hornet drawpoints and so the solution would have downwards haulage which is
unlikely to be optimal. Second, as seen in the last column of Table 6.5 the optimal NPV
increases till Case 10 and starts to reduce after Case 10. Hence it is reasonable to disregard
the last case.
6.4.2 Breakout point at R2
Table 6.6 shows the optimal locations of the junction point, the optimal labellings and
corresponding NPVs for Cases 1 - 12 when the breakout point is at R2. The other four
cases are not applicable as the breakout point is below the two drawpoints as before. The
optimal location of the junction, the optimal labelling mmb and the corresponding NPV
of $83 478 168 are given in Case 7 when the breakout point is at R2.
6.4.3 Breakout point at R3
In this case, the breakout point is fixed at R3 and the optimal locations of the junction, the
optimal labellings and the corresponding NPVs are obtained for 10 cases. Similarly, the
other 6 cases are not applicable as the Hornet drawpoints are above the Rubicon breakout
point. Table 6.7 shows the variation of the junction point for the optimal labellings. When
the breakout point is at R3, Case 6 provides the optimal configuration with the maximum
NPV of $83 324 417.
6.4.4 Breakout point at R4
Table 6.8 illustrates the optimal locations of the junction point, the optimal labellings
and the corresponding NPVs for 8 cases. Again, the rest of the cases are not applicable
as explained before. Case 4 provides the optimal location of the junction, the optimal
labelling mmb and the corresponding maximum NPV of $82 979 145.

6.4 Results 153
6.4.5 Globally Optimal solution
Table 6.9 shows the optimal labelling and corresponding NPV when the breakout points
are at R1, R2, R3, R4. The maximum NPV of $83 478 168 occurs when the connector starts
from Rubicon start point R2 and connects to the Hornet drawpoints 6045, 6065. The
optimal labelling is the labelling mmb and the coordinates of the optimal location of the
junction are (9842.118, 15 508.049, 6066.239).
The results show that the connector joins at the highest grade ore locations which are
situated at 6045, 6065 in Hornet as shown in Fig. 6.6.
Figure 6.6: Optimal solution for the case study

154C
asestudy
CasesOptimal labellings
Globally optimal solution Optimal
Optimal location of the junction Gradients NPV
Locally Globally x y z g1 g2 g3 $
Case 1 mmb, m f m mmb 9806.935 14 929.498 6028.766 0.1429 0.1429 0.1823 67 988 128
Case 2 mmb, m f m mmb 9823.971 14 997.728 6038.548 0.1429 0.1429 0.1796 69 662 337
Case 3 mmb mmb 9839.780 15 069.009 6048.734 0.1429 0.1429 0.1870 71 785 782
Case 4 mmb mmb 9835.462 15 130.676 6057.545 0.1429 0.1429 0.1874 73 487 203
Case 5 mmb mmb 9839.694 15 209.853 6068.854 0.1429 0.1429 0.2165 75 623 317
Case 6 mmb mmb 9838.313 15 270.315 6077.492 0.1429 0.1429 0.2098 77 249 778
Case 7 mmb, m f m mmb 9843.389 15 349.671 6088.822 0.1429 0.1429 0.2826 79 312 393
Case 8 mbm, mm f mbm 9839.985 15 408.858 6097.282 0.1429 0.2880 0.1429 80 866 069
Case 9 mbm mbm 9842.010 15 490.985 6109.011 0.1429 1.8422 0.1429 82 892 977
Case 10 mbm mbm 9839.964 15 548.367 6117.211 0.1429 0.4573 0.1429 82 973 572
Case 11 mbm mbm 9843.121 15 632.950 6129.287 0.1429 0.1720 0.1429 82 197 518
Case 12 f b, mbm f b 9853.493 15 501.562 6164.579 0.0638 0.7776 - 81 146 165
Case 13 f b, mbm f b 9857.259 15 525.142 6184.610 0.0358 0.8389 - 80 848 215
Case 14 f b, mbm f b 9863.145 15 500.162 6204.046 0.0062 0.7573 - 80 065 426
Case 15 f b, mbm f b 9861.849 15 521.812 6224.877 0.0250 0.9605 - 79 617 025
Table 6.5: Optimal labellings and the optimal location of the junction point when the breakout point is at R1

6.4R
esults155
CasesOptimal labellings
Globally optimal solution Optimal
Optimal location of the junction Gradients NPV
Locally Globally x y z g1 g2 g3 $
Case 1 mmb, m f m mmb 9806.628 15 087.881 6006.147 0.1429 0.1429 0.1968 71 646 672
Case 2 mmb, m f m m f m 10 446.32 15 508.587 6032.922 0.1429 0.1164 0.1429 71 126 748
Case 3 mmb mmb 9837.321 15 227.247 6026.125 0.1429 0.1429 0.2099 75 623 605
Case 4 mmb mmb 9832.052 15 288.990 6034.942 0.1429 0.1429 0.2174 77 426 363
Case 5 mmb, m f m m f m 10 206.75 15 524.947 6054.934 0.1429 0.0848 0.1429 76 909 490
Case 6 mmb mmb 9835.390 15 428.690 6054.902 0.1429 0.1429 0.3171 81 395 804
Case 7 mmb mmb 9842.118 15 508.049 6066.239 0.1429 0.1429 6.1140 83 478 168
Case 8 mbm mbm 9838.373 15 567.041 6074.668 0.1429 0.2633 0.1429 83 453 560
Case 9 mbm mbm 9841.598 15 649.195 6086.403 0.1429 0.1772 0.1429 82 747 849
Case 10 f b, mbm f b 9846.451 15 501.936 6123.909 0.0565 0.9591 - 82 080 387
Case 11 f b, mbm f b 9850.112 15 527.268 6144.418 0.0273 0.8013 - 81 774 692
Case 12 f b, mbm f b 9853.493 15 501.562 6164.579 0.0035 0.7776 - 81 102 771
Table 6.6: Optimal labellings and the optimal location of the junction point when the breakout point is at R2

156C
asestudy
CasesOptimal labellings
Globally optimal solution Optimal
Optimal location of the junction Gradients NPV
Locally Globally x y z g1 g2 g3 $
Case 1 mmb, m f m mmb 9814.879 15 237.789 5984.713 0.1429 0.1429 0.2258 75 097 182
Case 2 mmb, m f m m f m 10 263.88 15 520.726 6006.825 0.1429 0.1051 0.1429 74 772 343
Case 3 mmb mmb 9486.073 15 519.946 6012.988 0.1429 0.0852 0.1429 76 851 016
Case 4 mmb mmb 9833.128 15 439.177 6013.503 0.1429 0.1429 0.3470 81 145 107
Case 5 mmb, m f m m f m 9688.892 15 526.991 6023.865 0.1429 0.0032 0.1429 81 176 264
Case 6 mmb mmb 9834.175 15 578.459 6033.400 0.1429 0.1429 0.1799 83 324 417
Case 7 mmb mmb 9840.573 15 658.037 6044.758 0.1429 0.1429 0.1775 82 888 159
Case 8 f b, mbm f b 9841.863 15 504.792 6083.575 0.0536 0.9512 - 82 612 338
Case 9 f b, mbm f b 9840.487 15 521.042 6104.712 0.0231 1.2961 - 82 285 958
Case 10 f b, mbm f b 9846.451 15 501.936 6123.909 0.0056 0.9591 - 81 860 178
Table 6.7: Optimal labellings and the optimal location of the junction point when the breakout point is at R3

6.4R
esults157
CasesOptimal labellings
Globally optimal solution Optimal
Optimal location of the junction Gradients NPV
Locally Globally x y z g1 g2 g3 $
Case 1 mmb, m f m mmb 9819.311 15 378.169 5964.656 0.1429 0.1429 0.3092 78 537 061
Case 2 mmb, m f m m f m 10 072.768 15 528.310 5979.512 0.1429 0.0740 0.1429 78 511 903
Case 3 mmb, m f m m f m 9692.371 15 523.402 5983.521 0.1429 0.0018 0.1429 8 077 4007
Case 4 mmb mmb 9830.962 15 579.285 5993.384 0.1429 0.1429 0.1843 82 979 145
Case 5 mmb mmb 9836.575 15 658.747 6004.720 0.1429 0.1429 0.1796 82 908 364
Case 6 f b, mbm f b 9842.123 15 511.853 6042.983 0.0535 0.2816 - 82 894 902
Case 7 f b, mbm f b 9838.533 15 525.413 6063.707 0.0227 0.1450 - 82 680 439
Case 8 f f , mbm f f 9824.143 16 174.721 6078.452 0.0076 0.0227 - 79 512 703
Table 6.8: Optimal labellings and the optimal location of the junction point when the breakout point is at R4
Rubicon Hornet Optimal Globally optimal solution Optimal
start access labelling Optimal location of the junction Gradients NPV
points points x y z g1 g2 g3 $
R1 6105, 6125 mbm 9839.964 15 548.367 6117.211 0.1429 0.4573 0.1429 82 973 572
R2 6045, 6065 mmb 9842.118 15 508.049 6066.239 0.1429 0.1429 6.1140 83 478 168
R3 6025, 6045 mmb 9834.175 15 578.459 6033.400 0.1429 0.1429 0.1799 83 324 417
R4 5985, 6005 mmb 9830.962 15 579.285 5993.384 0.1429 0.1429 0.1843 82 979 145
Table 6.9: Globally optimal solution

158 Case study
6.5 Conclusion
The gradient-constrained discounted Steiner point algorithm has been successfully ap-
plied to a case study [56]. In the case study, the connector that links two underground
mines is designed to obtain the maximum NPV. In the optimisation several breakout
points are considered and then the best location of the breakout point is identified. The
theory developed in Chapter 4 is used to identify the optimal labellings for this case
study. The results of the case study suggest that the gradient-constrained discounted
Steiner point algorithm works well.

Chapter 7
Conclusion
THE findings of the thesis include the development of algorithms to design the under-
ground mine access and schedule its construction to maximise the NPV. In addition,
several opportunities for further research have been identified, including extending the
developed algorithms to locate multiple discounted Steiner points in the presence of a
gradient constraint and developing new theory to incorporate the curvature constraint,
stockpiles along the access drives, variable cost rate, and geo-mechanical conditions on
access drives.
7.1 Summary of findings
Discounted Steiner networks and gradient-constrained discounted Steiner networks and
their application to underground mining were studied. The aims of this research, estab-
lished in Chapter 2, have been addressed as follows.
7.1.1 Locating a single discounted Steiner point - unconstrained problem
Chapter 3 develops fundamental methods and efficient algorithms towards maximising
the NPV for an underground mine without considering operational constraints such as
the gradient constraint. The research problem is modelled as a tree network problem,
where the locations of the ore resource points are given and the junction point of the
network is to be obtained for a specific given objective function.
159

160 Conclusion
Access construction process: one face at a time
The process of constructing the access can be classified according to the number of faces
being developed concurrently. An underground mine with a single decline branching at
a junction point (a discounted Steiner point) into two declines is considered. After con-
struction reaches the junction, one face of the decline can be developed at a time. The 1-
face discounted Steiner point algorithm is proposed for optimally locating the discounted
Steiner point. This algorithm provides higher NPV compared with the placement of the
discounted Steiner point at the classical position. Furthermore, the paths from the dis-
counted Steiner point to the surface portal and the first resource point make equal angles
with the path from the discounted Steiner point to the second resource point.
Access construction process: two faces at a time
If the mine is being developed with two faces, after construction reaches the junction, the
two faces of the decline can be constructed concurrently. The main advantage of using
two development faces is to reduce the mining equipment idle time because with two
development faces two decline links can be constructed at a time. The 2-face discounted
Steiner point algorithm is proposed for optimally locating the discounted Steiner point.
This algorithm also provides higher NPV compared with the placement of the discounted
Steiner point at the classical position.
7.1.2 Locating a single discounted Steiner point - constrained problem
In Chapter 4, the gradient-constrained discounted Steiner point algorithm is proposed
for optimally locating the discounted Steiner point to maximise the NPV. The gradient
constraint defines a navigability condition for trucks along the underground tunnels.
Labellings are essential to define a tree configuration to indicate gradients on the
edges of the network. An edge pq is labelled as an f -edge, an m-edge or a b-edge if
g(pq) < m, g(pq) = m or g(pq) > m respectively, where m is the maximum gradient.
Each tree configuration is identified by its labelling. An edge that is above the discounted
Steiner point, or at the same level, is denoted by the chevron mark.

7.1 Summary of findings 161
The analysis is based on the given surface portal or breakout point and whether the
resource points are above or below the discounted Steiner point. If the two resource
points are below the discounted Steiner point, one of the labellings f f f , f f m, m f m, mm f ,
mmm, m f f or bmm is optimal. If the surface portal or breakout point and the second
resource point are above the discounted Steiner point and the first resource point is below
the discounted Steiner point, one of the labellings f f f , f f m, f m f , f mm, mm f , mmm or
mbm is optimal. If the surface portal or breakout point and the first resource point are
above the discounted Steiner point and the second resource point is below the discounted
Steiner point, one of the labellings mmm, mmb, m f b, m f m, f mb, f mm, f m f , f f b, f f m or
f f f is optimal.
The optimal location of the discounted Steiner point is obtained for each of the opti-
mal labellings above and then the globally optimal discounted Steiner point can be cho-
sen. The gradient-constrained discounted Steiner point algorithm is proposed for opti-
mally locating the discounted Steiner point when the gradient constraint is active in a
network.
7.1.3 Locating two discounted Steiner points - unconstrained problem
In Chapter 5, two discounted Steiner points are located without considering the gradient
constraint. The 1-face discounted Steiner point algorithm is extended to locate two junc-
tion points. The extension of 1-face discounted Steiner point algorithm is proposed for the
scenario of a network with two discounted Steiner points. Three algorithms, E1FDSPAa,
E1FDSPAb, E1FDSPAc, are proposed to optimally locate two junction points for three
different layouts. Numerical trials show that these algorithms work well.
7.1.4 Case study
In Chapter 6, the gradient-constrained discounted Steiner point algorithm is applied
to a case study where two underground mines are joined using a connector. The aim
is to maximise the NPV associated with the connector. The mines are being operated
with a single development face. The results of the case study suggest that the gradient-

162 Conclusion
constrained discounted Steiner point algorithm works well.
7.2 Publications
The research carried out for this thesis has been, or is intended to be, published in the
following.
Journals and conference proceedings: [50–54, 56]
Posters:
1. Sirinanda K.G., Brazil M, Grossman P.A., Rubinstein J.H., Thomas D.A. : Under-
ground mine access design to maximise the Net Present Value. International Min-
ing And Resources conference IMARC, Melbourne, Australia, 2014 (Best student
poster).
2. Sirinanda K.G., Brazil M, Grossman P.A., Rubinstein J.H., Thomas D.A. : Optimally
locating multiple junction points to maximise the Net Present Value. International
Mining And Resources conference IMARC, Melbourne, Australia, 2014.
Peer reviewed conference paper abstracts:
1. Sirinanda K.G., Brazil M, Grossman P.A., Rubinstein J.H., Thomas D.A. : Under-
ground mine access design to maximise the Net Present Value. Institute for Op-
erations Research and the Management Sciences (Informs) Annual Meeting, San
Francisco, USA, 2014.
7.3 Future work
Opportunities for further research originating from the contributions of this thesis have
been identified, and are discussed in the following.
7.3.1 Extension of the algorithms
The 1-face discounted Steiner point algorithm without the gradient constraint will be
extended from locating two discounted Steiner points to locating multiple discounted

7.3 Future work 163
Steiner points. For the gradient-constrained case as seen in Chapter 4, even for a sin-
gle discounted Steiner point 24 optimal labellings are possible. In future research, the
gradient-constrained discounted Steiner point algorithm will be extended to locate more
discounted Steiner points.
7.3.2 Further improvement
The optimisation will be carried out considering more physical constraints on the un-
derground access. The most important other constraint on the decline is the curvature
constraint which defines the safe turning circle radius for mining trucks. The theory of
Dubins paths has been used to locate the Steiner point with the objective of minimising
the development and infrastructure costs for an underground mine. This theory will be
applied to discounted Steiner trees in order to locate the discounted Steiner point in the
maximum NPV network.
The costs of development are assumed to be a constant. However, due to increased
hauling times with increasing length this usually is not the case. Moreover, geo-mechanical
conditions and potential spatial constraints on the junction will be considered in future
research. In optimisation, the possibility of adding stockpiles along the access drives
will be considered. These considerations would add a more detailed analysis of the dis-
counted Steiner point which could then guide the development of a software tool.
7.3.3 Decline optimisation tool to maximise the NPV
The ultimate aim would be to develop a software tool to optimise the underground mine
access to maximise the NPV subject to the gradient and curvature constraints. This would
involve modelling the decline network so as to capture the operational constraints such
as gradient and curvature constraints and discounted costs of a real mine.


Appendix A
Scheduling access construction andore extraction for a range of
simultaneous faces
THIS appendix proposes a mathematical model to schedule the access construction
and the ore extraction for maximum NPV when a mine is being operated with a
number of simultaneous faces. A mixed integer programming technique is used to de-
velop the model. The access layout of the underground mine and the locations of the
junction points are assumed to be given. The proposed mathematical model is applied to
optimise the schedule for the access construction and the ore extraction for two different
hypothetical mines where there are a number of development faces being worked. The
NPV is obtained and compared for a range of development faces.
A.1 Introduction
In the literature [2, 33, 35–37], it is shown that Mixed Integer Programming (MIP) is the
preferred technique to maximise the NPV for underground mines. MIP models are very
efficient and reliable for large mines. In this section an MIP model is developed to sched-
ule the access construction and the ore extraction for an underground mine.
Declines are passageways connecting one or more levels to each other and/or to the
surface in a mine. Fig A.1 shows an underground mine containing declines. The crosscuts
are the near horizontal tunnels driven across the mineralised vein or orebody. The blocks
are large solid pieces of mineable material. The collection of all the adjacent blocks in one
165

166 Scheduling access construction and ore extraction for a range of simultaneous faces
level is known as a panel. Each panel has one or more blocks of ore.
Figure A.1: Underground mine with decline access
In the proposed model, all the declines and crosscuts are divided into a number of
portions. A portion is the smallest length of a decline or crosscut which is developed
in a particular time period. Hence, the number of portions that can be constructed in a
particular scheduling time period depends on the number of simultaneous faces.
The assumptions of this model are that the layout of the network is fixed or the decline
network has already been designed to reach the underground ore blocks. However, the
access needs to be constructed. It is assumed that partial construction of crosscut and
decline portions and ore extraction from the blocks are not allowed.
In Section A.2 the objective function and the constraints of the MIP model are formu-
lated. In Section A.3, results are given from numerical trials that have been carried out
to investigate the efficiency of the proposed model for given simple and complex mine
networks. In Section A.3.1, the proposed MIP model is applied to a simple underground
mine network with two branches and then the variation of the NPV under different num-
bers of faces is discussed. A scheduling scheme is used to explain the detailed process
throughout the life time of the mine. In addition, the optimal scheduling scheme includes
the starting and ending time of the main activities such as the construction of the declines
and crosscuts and the extraction of the ore which is described using Gantt charts. In Sec-

A.2 Problem formulation 167
tion A.3.2, the proposed MIP model is applied to a complex mine with more branches
and ore deposits. Finally, the variations in the NPV for different numbers of faces and
detailed optimal scheduling plans are given.
A.2 Problem formulation
The objective is to maximise the NPV of an underground mine when it is being oper-
ated with a given number of faces. The objective function given in (A.1) has three terms.
The first term is the cash flows generated from the ore production. The second and third
terms are the cash flows generated from the access construction for declines and cross-
cuts. Present Value (PV) refers to the value at a given time for the extraction and devel-
opment. PV is calculated using the basic discounting formula given in Chapter 2 Section
2.1. The NPV is the total sum of all the PVs. Therefore, the objective function can be
written,
maxT
∑t=1
N
∑i=1
ni
∑j=1
PVx(j, i, t)Ix(j, i, t) +T
∑t=1
l
∑i=1
PVd(i, t)Id(i, t) +T
∑t=1
N
∑i=1
mi
∑j=1
PVc(j, i, t)Ic(j, i, t)
(A.1)
where,
PVx(j, i, t) is the PV of the jth block in the ith panel at time period t.
PVd(i, t) is the PV of the ith decline portion at time period t.
PVc(j, i, t) is the PV of the jth crosscut portion in the ith panel at time period t.
Ix(j, i, t) =
1 if the jth block in the ith panel is mined during the time period t.
0 otherwise
Id(i, t) =
1 if the ith decline portion is constructed during the time period t.
0 otherwise
Ic(j, i, t) =
1 if the jth crosscut portion in the ith panel is
constructed during the time period t.
0 otherwise

168 Scheduling access construction and ore extraction for a range of simultaneous faces
ni - total number of blocks in the ith panel.
N- total number of panels.
T - number of scheduling periods.
l - total number of decline portions.
mi - total number of crosscut portions in the ith panel.
Constraints
In this section, the mathematical constraints that are used in the MIP model such as pro-
cessing capacity, mining capacity, reserve, development, and sequencing or precedence
constraints are explained.
Processing capacity constraints
The amount of the ore processed at the mill during any time period cannot be larger
than the maximum processing capacity and it should be at least as large as the minimum
processing capacity.
For each period t,N
∑i=1
ni
∑j=1
O(j, i)Ix(j, i, t) ≤ PCmax
N
∑i=1
ni
∑j=1
O(j, i)Ix(j, i, t) ≥ PCmin
where,
O(j, i) - ore tonnage in the jth block in the ith panel.
PCmax - maximum processing capacity.
PCmin - minimum processing capacity.
Mining capacity constraints
The mining capacity is the total equipment capacity which can be used to extract the ore
and to construct the declines and crosscut portions for each time period. This cannot be
larger than the maximum equipment capacity.

A.2 Problem formulation 169
For each period t,
N
∑i=1
ni
∑j=1
O(j, i)Ix(j, i, t) +l
∑i=1
Wd(i)Id(i, t) +N
∑i=1
mi
∑j=1
Wc(j, i)Ic(j, i, t) ≤ MCmax
where,
Wc(j, i) - waste tonnage in the jth crosscut portion in the ith panel.
Wd(i) - waste tonnage in the ith decline portion.
MCmax - maximum mining capacity.
Reserve constraints
A block cannot be mined more than once for each pair i, j,
T
∑t=1
Ix(j, i, t) ≤ 1
A decline portion cannot be constructed more than once for each i,
T
∑t=1
Id(i, t) ≤ 1
A crosscut portion cannot be constructed more than once for each pair i, j,
T
∑t=1
Ic(j, i, t) ≤ 1
Development constraints
The number of portions which can be completed for each time period depends on the
number of faces that are worked in the mine.
For any time period t,
N
∑i=1
ni
∑j=1
Ix(j, i, t) +l
∑i=1
Id(i, t) +N
∑i=1
mi
∑j=1
Ic(j, i, t) ≤ Emax

170 Scheduling access construction and ore extraction for a range of simultaneous faces
where,
Emax - maximum number of faces which can be worked in one time period.
Sequencing or precedence constraints
These constraints are used to update the values of binary variables in previous time pe-
riods. The new binary variables are added to identify that the previous task has been
completed during and after the scheduling time period t.
Jd(i, t) =
1 during and after the construction of the ith decline portion in time period t.
0 before the construction of the ith decline portion in time period t.
Jc(j, i, t) =
1 during and after the construction of the jth
crosscut portion in ith panel in time period t.
0 before the construction of the jth
crosscut portion in the ith panel in time period t.
Jx(j, i, t) =
1 during and after the production of the jth block in the ith
panel in time period t.
0 before the production of the jth block in the ith panel in time period t.
The constraints to update the binary variables for each i, j, t (t ≥ 1) are given by,
Jd(i, t) = Id(i, t) + Jd(i, t− 1)
Jc(j, i, t) = Ic(j, i, t) + Jc(j, i, t− 1)
Jx(j, i, t) = Ix(j, i, t) + Jx(j, i, t− 1)
Note that the constraint on the declines needs to be modified at the junction points. As
an example, suppose the portion (at the principal branch) before the junction point is lb.
After the junction point, the principal branch is separated into two decline portions lb1
and lb2 in the first and second branch respectively. Therefore, at the junction point, lb
needs to be constructed before constructing lb1 and lb2 . Since this constraint depends on

A.3 Implementation 171
the number of junction points in the network, it is hard-coded in the CPLEX program.
In order to construct the (i + 1)th decline portion in time period t, the construction
of the ith decline portion in time period (t − 1) should be completed. Similarly for the
crosscuts and blocks. Therefore,
Jd(i, t− 1) ≥ Id(i + 1, t)
Jc(j, i, t− 1) ≥ Ic(j + 1, i, t)
Jx(j, i, t− 1) ≥ Ix(j + 1, i, t)
Similarly, when moving from the last portion li in each decline at time period (t− 1) to
the first portion in the adjacent crosscut at time period t,
Jd(li, t− 1) ≥ Ic(1, i, t)
Similarly, moving from the last crosscut portion to the first block in each panel,
Jc(mi, i, t− 1) ≥ Ix(1, i, t)
A.3 Implementation
The model has been developed and implemented as a mixed integer program in CPLEX.
As seen in the literature review, mixed integer programming techniques are the most
powerful tools to deal with such problems [2, 30, 31, 33, 41]. CPLEX IBM 12.3 is an ideal
platform to tackle such mixed integer programming problems. The main idea is to use
binary variables for each activity, specifically for the construction of declines, crosscuts
and extraction of the ore. Mining capacity, processing capacity, reserve, development and
sequencing are the constraints used in this model.
The computer which was used to run the CPLEX codes has the specification of Intel(R)
Core (TM) i7-2600 CPU at 3.40GHz, 3.23GB of RAM and the same computer was used for
all the cases below.

172 Scheduling access construction and ore extraction for a range of simultaneous faces
A.3.1 Underground mine with two branches
First, the proposed MIP model is applied to a simple mine network which consists of two
branches and 12 ore blocks. The cases are organised as follows:
Case A - the mine is operated one face at a time.
Case B - the mine is operated two faces at a time.
Case C - the mine is operated three faces at a time.
Case A
Figure A.2: The optimal scheduling scheme for the one face operation
Figure A.3: Gantt chart for the one face operation
The layout in Fig. A.2 shows an underground network comprising two branches with
two panels each. In the first branch, each block in the first panel has an ore value $1000k
and the second panel consists of ore blocks with a value of $500k each. The values of
the panels in the second branch are defined as opposite to the first branch. The idea is to

A.3 Implementation 173
confirm that the scheduling pursues the higher value blocks first. The development cost
is $60k for each decline portion, and $30k for each crosscut portion, and a 10% weekly
discount rate is used. Only a single face at a time is worked throughout the scheduling
periods.
The resultant construction and extraction time periods are shown next to each portion
or block (.W). As expected, the optimal schedule works to get the higher value ore first.
It takes 39 weeks to complete the whole process including the development of the access
and the extraction of the ore. The schedule gives an NPV of $7426k at the 10% weekly
discount rate.
Fig. A.3 shows the Gantt chart for the scheduling scheme in Fig. A.2. The decline
portions are numbered starting from the first decline link to the end of the last decline
link in the fourth panel and when it comes to a junction point, the decline portion that is
to the left of the branching point is numbered first.
Case B
In this case the mine operation with up to two faces operating simultaneously is con-
sidered. All the present values of each activity and construction costs are the same as
for the previous case. Figs. A.4 and A.5 illustrate the optimal scheduling process for
Figure A.4: The optimal scheduling scheme for two simultaneous faces
the specified access network. With two faces, two tasks can be completed at one time
or two portions can be constructed in one week. In the fourth week the faces on both
the branches are developed simultaneously. Because of this the scheduling process can

174 Scheduling access construction and ore extraction for a range of simultaneous faces
Figure A.5: Gantt chart for two simultaneous faces operation
be completed in a shorter time period compared with the one face operation. As in the
previous case, extracting the higher value ore is carried out first and this is independent
of the number of faces.
The total number of scheduling periods is reduced from 39 weeks to 23 weeks when
compared with the first case. Case B generates an NPV of $7533k at the 10% weekly
discount rate. Furthermore, a 1.44% NPV improvement is obtained compared with the
one face operation providing $0.11M additional cash flow.
Case C
Here all the data is identical to the previous cases except that the number of faces that can
be operated is set to three throughout the scheduling periods. This case confirms that
Figure A.6: The optimal scheduling scheme for three simultaneous faces

A.3 Implementation 175
Figure A.7: Gantt chart for three simultaneous faces operation
when three faces are operated all the tasks can be completed faster compared to the other
two cases. According to the Gantt chart in Fig. A.7, all the faces are being used from the
seventh week onwards. Two faces are operated in the second branch and the other in the
first branch. Similarly, again the highest value ore is extracted first.
The whole mining project is completed within 19 weeks with an NPV of $7553k at the
10% weekly discount rate. This NPV is higher compared with the other two cases. This
shows a 1.71% improvement in the NPV compared to the first case because three faces
means the less valuable ore is reached faster.
Comparison of the cases
Table A.1 shows the comparison between the NPVs, total scheduling periods and the
time taken to obtain the optimised solution.
Number of faces NPV / k$ Total scheduling periods / weeks Solution time / s1 7426 39 48.632 7533 23 16.743 7553 19 10.18
Table A.1: Variation of NPV, total scheduling periods and solution time with the numberof faces
The bar chart in Fig. A.8 shows the NPV changes with the number of faces. If the

176 Scheduling access construction and ore extraction for a range of simultaneous faces
number of faces is increased, then the activities can be completed in less time, thus in-
creasing the NPV. As shown in Fig. A.9, when the number of faces is increased more
portions can be constructed in one time period. Therefore, the total scheduling time is
reduced.
Figure A.8: Variation of the NPV with the number of faces
Figure A.9: Variation of scheduling periods with the number of faces
The solution times from running the CPLEX program are illustrated in Fig. A.10.
The computational time mainly depends on the number of iterations that take place to
obtain the optimal solution. There are many feasible options or branches to be selected
from for the single face operation where one portion only has to be constructed at one
time. However, as the number of faces increases, the development constraint is relaxed

A.3 Implementation 177
Figure A.10: Variation of solution time with the number of faces
and the number of iterations decreases. Therefore, the convergence time of the optimised
solution is reduced.
Figure A.11: Average start scheduling time for various numbers of faces
Fig. A.11 shows that the extraction of the highest value ore ($1000k) is started before
proceeding to extract the less valuable ore ($500k). In addition, when the mine is operated
with two or three faces simultaneously there is no effect on the starting time for extracting
the highest value ore ($1000k) in the mine. However, the average starting time is different
when the less valued ore ($500k) is extracted.

178 Scheduling access construction and ore extraction for a range of simultaneous faces
A.3.2 Underground mine with three branches
A complex underground mine with three branches and 27 blocks which operates with
one, two and three simultaneous faces is considered. The cases are organised as follows;
Case A - the mine is operated one face at a time.
Case B - the mine is operated two faces at a time.
Case C - the mine is operated three faces at a time.
Case A
The layout in Fig. A.12 shows an underground network with three branches and nine
panels. The first, fourth and seventh panels each have blocks with an ore value of $100k.
The second, fifth and eighth panels have a value of $500k in each block and in all the
bottom panels in each branch the value of each block is $1200k. The development cost
rates of decline and crosscut portions are $60k and $30k respectively. One face is operated
throughout the life time of the mine. The resulting development period of each portion
is illustrated next to each portion. In the single face operation, the highest value ore
($1200k) in the ninth panel is extracted in the nineteenth week. Afterwards, the extraction
of the ore in the eighth panel is completed. The single face operation provides an NPV of
$12532k and takes 87 weeks for the entire process.
Case B
In this case two faces are operated simultaneously in the underground mine. It takes 49
weeks to complete the entire scheduling process. Case B generates an NPV of $12923k at
the 10% weekly discount rate. The optimal schedule for this case is shown in Fig. A.13.
The average starting scheduling time of the highest value ore blocks ($1200k) is 27 weeks.
However, for the lowest value ore ($100k) that is 37 weeks and 4 days. This means that
the extraction of the less valuable ore is started closer to the end of the project.

A.3 Implementation 179
Case C
In this case three faces are operated simultaneously in the underground mine. It takes 33
weeks to complete the whole scheduling process for the network layout in Fig. A.14. The
results show that an NPV of $13125k is obtained at the 10% weekly discount rate. Fig.
A.14 shows the optimal scheduling scheme for three simultaneous faces being operated
in the mine. In the first 15 weeks the construction of the third branch is completed in
order to access the higher valuable ore in a short period of time.

180Scheduling
accessconstruction
andore
extractionfor
arange
ofsimultaneous
faces
Figure A.12: The optimal scheduling scheme for the one face operation

A.3
Implem
entation181
Figure A.13: The optimal scheduling scheme for a two faces operation

182Scheduling
accessconstruction
andore
extractionfor
arange
ofsimultaneous
faces
Figure A.14: The optimal scheduling scheme for a three faces operation

A.3 Implementation 183
Comparison of the cases
The bar chart in Fig. A.15 shows that the NPV increases with the number of faces avail-
able. This implies that if the underground mine is scheduled with more faces, then it
can achieve a higher NPV. If the mine is operated with three faces, the NPV is improved
by 4% compared to one face operating in the mine. If the number of faces increases in
the mine operation, then the total number of scheduling periods is reduced since more
activities can be completed simultaneously as shown in Fig. A.16.
The computational time is more than six hours when the simulation is carried out
with one face as illustrated in the bar chart in Fig. A.17. The reason is the feasible region
is bigger and it takes more time to converge to the optimised solution. In such cases the
need for heuristic methods and the other optimisation techniques is apparent.
Number of faces NPV / k$ Total scheduling periods / weeks Solution time / min1 12532 87 3732 12923 49 183 13125 33 2
Table A.2: Variation of the NPV, total scheduling periods and solution time with thenumber of faces
Figure A.15: Variation of the NPV with the number of faces

184 Scheduling access construction and ore extraction for a range of simultaneous faces
Figure A.16: Variation of the total scheduling periods with the number of faces
Figure A.17: Variation of the solution time with the number of faces
A.4 Discussion
The developed MIP model in this appendix is used to schedule the access construction
and ore extraction of the two specific mines discussed above. The purpose of these imple-
mentations is to gain an understanding of the way the optimisation works. The results
show that the optimal schedule works to extract the higher valuable ore earlier as ex-
pected thus maxisming the NPV.
A problem with MIP models is that when the size of the mine is increased, the time

A.5 Conclusion 185
taken to obtain the optimised solution increases as shown in Fig. A.18. This is illustrated
using the examples that are discussed in the previous sections. Therefore, this highlights
the need for heuristic methods and different optimisation techniques to reduce the com-
putational time.
Figure A.18: Variation of the computational time with the size of the underground mine
A.5 Conclusion
In this appendix an MIP model is introduced to optimally schedule the access construc-
tion and the ore extraction of a mine. The variation of the NPV for a range of faces that
are available in an underground mine is analysed. By increasing the number of faces,
multiple tasks can be completed at a time and this will increase the NPV.


Bibliography
[1] M. Nehring, E. Topal, and J. Little. A new mathematical programming model for
production schedule optimisation in underground mining operations. Journal of the
South African Institute of Mining and Metallurgy, 110(8):437–447, 2010.
[2] M. Nehring and E. Topal. Production schedule optimisation in underground hard
rock mining using mixed integer programming. Project Evaluation Conference, The
AusIMM, 2007(4):169–175, 2007.
[3] http://www.nsrltd.com/.
[4] S. C. Myres and N. S. Mujluf. Corporate financing and investment decisions when
firms have information that investors do not have. Journal of Financial Economics,
13(2):187–221, 1984.
[5] R. Dimitrakopoulos. Conditional simulation algorithms for modelling orebody un-
certainty in open pit optimisation. International Journal of Surface Mining, Reclamation
and Environment, 12(4):173–179, 1998.
[6] R. G. Dimitrakopoulos and S.A. Abdel Sabour. Evaluating mine plans under un-
certainty: Can the real options make a difference? Resources Policy, 32(3):116–125,
2007.
[7] M. W. A. Asad. Cutoff grade optimization algorithm with stockpiling option for
open pit mining operations of two economic minerals. International Journal of Surface
Mining, Reclamation and Environment, 19(3):176–187, 2005.
187

188 BIBLIOGRAPHY
[8] Y. C. Kim. Ultimate pit design methodologies using computer models-the state of
the art. Mining Engineering, 30(10):1454–1459, 1978.
[9] Z. Shenggui and A. M Starfield. Dynamic programming with colour graphics
smoothing for open-pit design on a personal computer. International Journal of Min-
ing Engineering, 3(1):27–34, 1985.
[10] T. B. Johnson and R. W. Sharp. Three dimensional dynamic programming method
for optimal ultimate pit design. US Bureau of Mines, Report of Investigation, 7553,
1971.
[11] H. Lerchs and I. F. Grossmann. Optimum design of open pit mines. Canadian Institute
of Mining Bulletin, 58:17–24, 1965.
[12] E. Koenigsberg. The optimum contours of an open pit mine: an application of dy-
namic programming. Proceedings of 17th International APCOM Symposium, 1982.
[13] F. L. Wilke, K. Mueller, and E. A. Wright. Ultimate and production scheduling opti-
mization. Proceedings of 18th International APCOM Symposium, pages 29–39, 1984.
[14] Y. Zhao and Y. C. Kim. A new optimum pit limit design algorithm. SME Preprint no.
90-9, SME Annual Meeting, Salt Lake City, Utah, USA, 1990.
[15] Y. Zhao and Y. C. Kim. A new graph theory algorithm for optimal ultimate design.
Proceedings of 23th International APCOM Symposium, pages 423–434, 1992.
[16] J. Ovanic and D. S. Young. Economic optimization of stope boundary using sep-
arable programming with special branch and bound techniques. Proceedings of 3rd
Canadian Conference on Computer Applications in the Mineral Industry, pages 129–135,
1995.
[17] J. Ovanic and D. S. Young. Economic optimization of open stope geometry. Proceed-
ings of 28th International APCOM Symposium, pages 285–290, 1999.
[18] M. Meyer. Applying linear programming to the design of ultimate pit limits. Man-
agement Science, 16(2):B121–135, 1969.

BIBLIOGRAPHY 189
[19] P. Huttagosol and R. E. Cameron. A computer design of ultimate pit limit by using
transportation algorithm. Proceedings of 23th International APCOM Symposium, pages
443–460, 1992.
[20] M. Lemieux. Moving cone optimizing algorithm. Computer Methods for the 80s in the
Mineral Industry, New York, pages 329–345, 1979.
[21] R. H. Robinson and N. B. Prenn. An optimum pit design model. Proceedings of 10th
International APCOM Symposium, pages 155–163, 1973.
[22] T. M. Yegulalp and A. J. Arias. A fast algorithm to solve the ultimate pit limit prob-
lem. Proceedings of 23th International APCOM Symposium, pages 391–397, 1992.
[23] T. M. Yegulalp, A. J. Arias, and P. Muduli. New development in ultimate pit limit
problem solution methods. SME Trans, pages 1853–1857, 1993.
[24] R. K. Ahuja and J. B. Orlin. A fast simple algorithm for the maximum flow problem.
Operations Research, 37(5):748–759, 1989.
[25] B. Denby and D. Schofield. Open pit design and scheduling by use of genetic algo-
rithms. The Institution of Mining and Metallurgy, London, 103:A21–26, 1994.
[26] M. Ataee-pour. A new heuristic algorithm to optimize stope boundaries. Proceedings
of the 2nd Regional APCOM Symposium, 1983.
[27] K. F. Lane. The Economic Definition of Ore - Cutoff Grade in Theory and Practice. Mining
Journal Books Limited, London, 1988.
[28] K. Dagdelen. Open pit optimization-strategies for improving economics of mining
projects through mine planning. International Mining Congress in Turkey, 2001.
[29] S. Ramazan and R. Dimitrakopoulos. Recent applications of operations research
and efficient MIP formulations in open pit mining. Society of Mining, Metallurgy, and
Exploration, 316:73–78, 2004.
[30] A. M. Newman, E. Rubio, R. Caro, A. Weintraub, and K. Eurek. A review of opera-
tions research in mine planning. Interfaces, 40(3):222–245, 2010.

190 BIBLIOGRAPHY
[31] E. Topal. Early start and late start algorithms to improve the solution time for long-
term underground mine production scheduling. The Journal of The Southern African
Institute of Mining and Metallurgy, 108:99–107, 2008.
[32] S. Ramazan and R. Dimitrakopoulos. Stochastic optimisation of long-term produc-
tion scheduling for open pit mines with a new integer programming formulation.
Orebody Modelling and Strategic Mine Planning. The AusIMM, Melbourne, pages 385–
391, 2007.
[33] M. Nehring, E. Topal, and P. Knights. An investigation to integrate optimum long-
term planning with short planning in underground mine production scheduling.
Mine Planning and Equipment Selection (MPES) conference, pages 141–153, Dec 2010.
[34] M. Smith, I. Sheppard, and G. Karunatillake. Using MIP for strategic life-of-mine
planning of the lead/zinc stream at Mount Isa Mines. Proceedings of the 31st Interna-
tional APCOM Symposium, Cape Town, South Africa, pages 465–474, 2003.
[35] D. Rahal, M. Smith, G. Van Hout, and A. Von Johannides. The use of mixed integer
linear programming for long-term scheduling in block caving mines. Proceedings
of the 31st International APCOM Symposium, Cape Town, South Africa, pages 123–131,
2003.
[36] G. McIsaac. Long-term planning of an underground mine using mixed-integer lin-
ear programming. Canadian Institute of Mining Bulletin, 98(1089):1–6, 2005.
[37] L. P. Trout. Underground mine production scheduling using mixed integer pro-
gramming. 25th International APCOM Symposium, Melbourne, Australia, pages 395–
400, Jul 1995.
[38] A. M. Newman and M. Kuchta. Using aggregation to optimize long-term produc-
tion planning at an underground mine. European Journal of Operational Research,
176(2):1205–1218, 2007.
[39] L. Caccetta and S. P. Hill. An application of branch and cut to open pit mine schedul-
ing. Journal of Global Optimization, 27(2-3):349–365, 2003.

BIBLIOGRAPHY 191
[40] H. Askari-Nasab, Y. Pourrahimian, E. Ben-Awuah, and S. Kalantari. Mixed integer
linear programming formulations for open pit production scheduling. Journal of
Mining Science, 47(3):338–359, 2011.
[41] J. Elkington. Optimising mining project value for a given configuration. PhD thesis,
University of Western Australia, 2009.
[42] F. K. Hwang, D. S. Richards, and P. Winter. The Steiner Tree Problem. Elsevier Science
Publishers, 1992.
[43] Z. A. Melzak. On the problem of Steiner. Canadian Mathematical Bulletin, 4(2):143–
148, 1961.
[44] E. N. Gilbert and H. O. Pollak. Steiner minimal trees. SIAM Journal on Applied
Mathematics, 16(1):1–29, 1968.
[45] M. Brazil and D. A. Thomas. Network optimisation for the design of underground
mines. Networks, 49(1):40–50, 2007.
[46] M. Brazil, D. Lee, J. H. Rubinstein, D. A. Thomas, J. F. Weng, and N. C. Wormald. Op-
timisation in the design of underground mine access. Orebody Modelling and Strategic
Mine Planning, pages 3–6, 2004.
[47] M. Brazil, D. A. Thomas, and J. F. Weng. Gradient-constrained minimum net-
works (II). Labelled or locally minimal Steiner points. Journal of Global Optimization,
42(1):23–37, 2008.
[48] M. Brazil, J. H. Rubinstein, D. A. Thomas, J. F. Weng, and N. C. Wormald. Gradient-
constrained minimum networks (I). Fundamentals. Journal of Global Optimization,
21(2):139–155, 2001.
[49] J. F. Weng. An approach to Conic Sections. Unpublished note, 1998.
[50] K. G. Sirinanda, M. Brazil, P. A. Grossman, J. H. Rubinstein, and D. A. Thomas.
Optimally locating a junction point for an underground mine to maximise the net
present value. ANZIAM J., 55:C315–C328, 2014.

192 BIBLIOGRAPHY
[51] K.G. Sirinanda, M. Brazil, P.A. Grossman, J.H. Rubinstein, and D.A. Thomas. Max-
imizing the net present value of a Steiner tree. Journal of Global Optimization,
62(2):391–407, 2015.
[52] K. G. Sirinanda, M. Brazil, P. A. Grossman, J. H. Rubinstein, and D. A. Thomas.
Strategic Underground Mine Access Design to Maximise the Net Present Value. Ore-
body Modelling and Strategic Mine Planning, pages 235–242, 2014.
[53] K.G. Sirinanda, M. Brazil, P.A. Grossman, J.H. Rubinstein, and D.A. Thomas.
Gradient-constrained discounted Steiner trees I: optimal tree configurations. Jour-
nal of Global Optimization, pages 1–17, 2015.
[54] K.G. Sirinanda, M. Brazil, P.A. Grossman, J.H. Rubinstein, and D.A. Thomas.
Gradient-constrained discounted Steiner trees II: optimally locating a discounted
Steiner point. Journal of Global Optimization, pages 1–18, 2015.
[55] L. R. Foulds and R. L. Graham. The Steiner problem in phylogeny is NP-complete.
Advances in Applied Mathematics, 3(1):43–49, 1982.
[56] K. G. Sirinanda, M. Brazil, P. A. Grossman, J. H. Rubinstein, and D. A. Thomas.
Optimal location of an underground connector using discounted Steiner tree theory.
International Journal of Mining and Mineral Engineering, Under review.

Minerva Access is the Institutional Repository of The University of Melbourne
Author/s:
SIRINANDA, KASHYAPA
Title:
Underground mine access design to maximise the net present value
Date:
2015
Persistent Link:
http://hdl.handle.net/11343/55162
File Description:
Underground mine access design to maximise the net present value








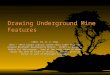
![Development Consent [Underground Mine]](https://img.pdfslide.us/doc/110x75/61c702ed978fda1722432dcf/development-consent-underground-mine.jpg)