Embed Size (px)
Citation preview

UCI Rocket Project2015-2016
BackgroundTraditional CubeSat launch cost:
$12,500/kg to as much as $2,000,000/kg
Traditional mesosphere research launch costs:~$4,500/kg to ~$40,000/kg.
UC San Diego, Portland State University, and USC are vying to be the first university to reach space
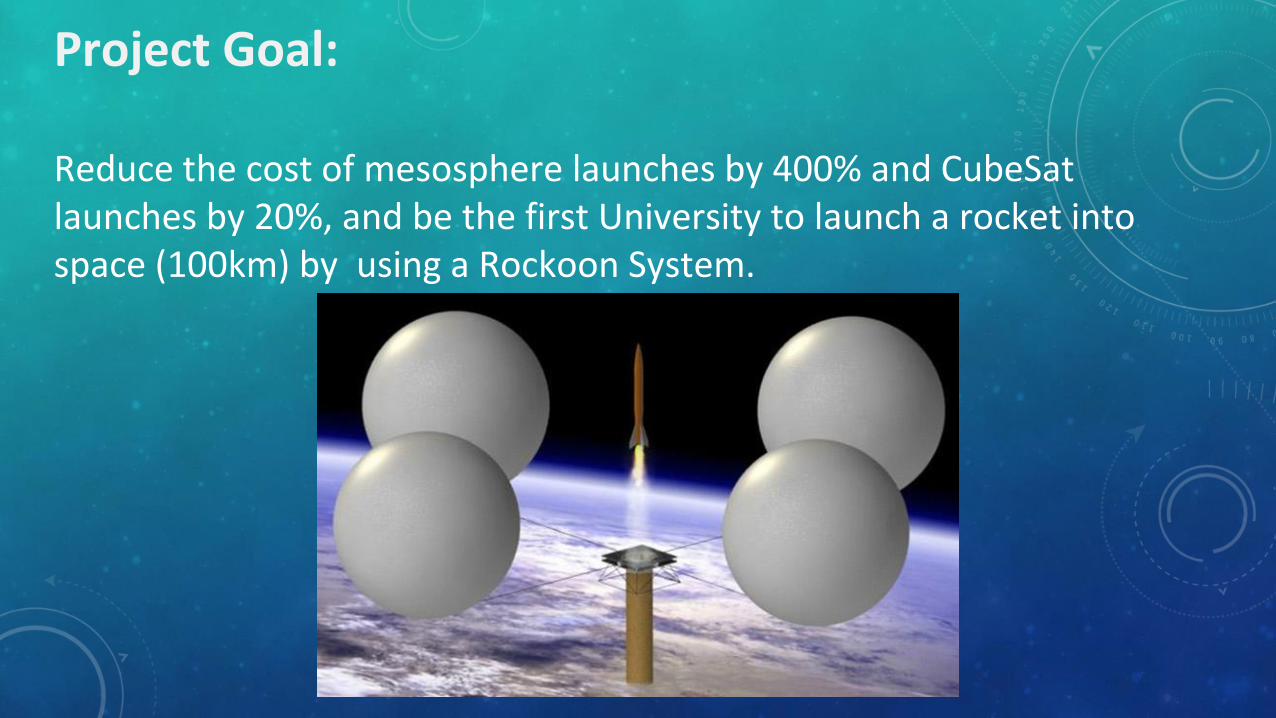
Project Goal:
Reduce the cost of mesosphere launches by 400% and CubeSat launches by 20%, and be the first University to launch a rocket into space (100km) by using a Rockoon System.

Rockoon: Balloon-Based Rocket High-Altitude Launch Platform
Disadvantages:
1. Drift Problem --- Ram-Air Parachute
Precision Landing System
1. Stability of Platform --- Gimbal
System
1. Cost of lifting Gas --- Solar Balloon &
Lightweight Design
Advantages:
1. Significantly reduce launch cost
• Traditional Launch: $4,500 / kg
• Rockoon Launch: $900 / kg
(Mesosphere)
2. Reach higher altitude
• Rockoon system lifts rocket up to 65,000 ft
before rocket ignition.
• Prototype 2 Rocket sea level launch: 3,000 ft
• Prototype 2 Rocket high altitude launch:
8,200 ft

Objectives for UCIRP 2015-2016
• Rockoon prototype 2 high altitude test (65,000ft)
Test structure and avionics system at high altitude
• Hybrid engine static fire test
Verify engine performance for future orbital launch
• Develop prototype of precision landing system
• Develop prototype of gimbaled thrust active stabilization system
• Design hybrid engine rocket capable of active thrust vector control and stabilization

Team Structure
Project Overview
Balloon Launch Hybrid Rocket Subsystems

Balloon Launch

Proof Concept: Prototype 1 Test

Prototype 1 Design Prototype 2 Design

Passive Gimbal Stabilized Launcher:
●Solution of stability problem
Truss Structure● Reduce the bending moment in balloon holding arms
● Limit the maximum rotation angle of gimbal

Rockoon Platform Prototype 2
Gimbal for prototype 2 Prototype 2 rocket

Solar Balloon VersionSolution of high cost of helium

Hybrid Rocket

Hybrid Rocket
• Engine Assembly (High Density Polyethylene and
Liquid Oxygen)
• Isp = 286s at launch
• Ablatively cooled, 4-engine configuration
• Sounding Rocket: 270 km (ΔV = 2.21 km/s, Dry Mass =
47.8%)
• Orbital Launch: ~150 km circular orbit (ΔV = 7.91 km/s, Dry
Mass = 7.1%)
• Design improvements for mass reduction and cost savings
• Liquid Oxygen vs. Nitrous Oxide (volume of oxidizer tank
required)
• Carbon composite oxidizer tank
• Carbon composite combustion chamber and nozzle
• Pressurization system- Gaseous Oxygen vs. Helium
Hybrid Engine Systems
• Liquid Oxygen Injector
• Fuel Grain
• High Density Polyethylene
• Pattern designed for maximum surface area and
minimal wasted fuel at burn out
• Composite Combustion Chamber and Nozzle
• Carbon/graphite insulation and ablative liner
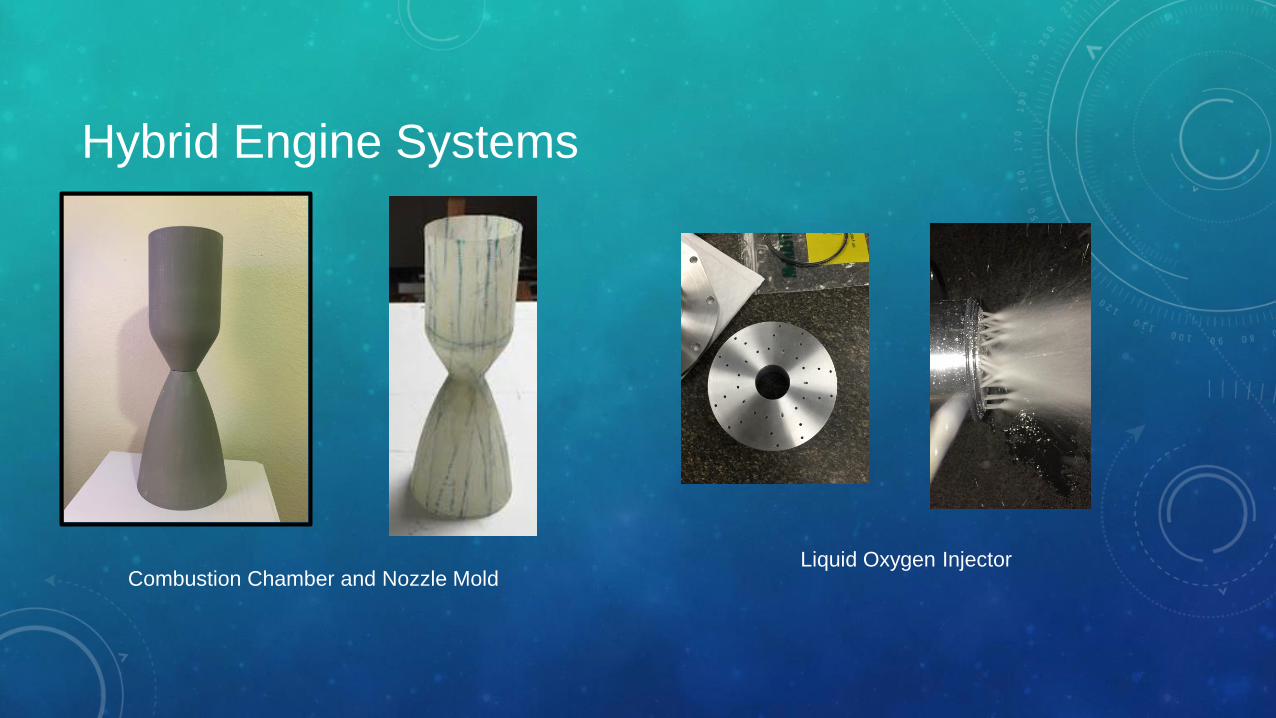
Hybrid Engine Systems
Combustion Chamber and Nozzle MoldLiquid Oxygen Injector

Plumbing Systems
• Liquid Oxygen Tanks
• Low mass (liner-less carbon overwrapped
pressure vessel)
• Gaseous Oxygen Pressurization System
• Replace high pressure helium system (safety and
mass considerations)
• Complications:
• Gathering necessary data to actively control
engines and protect hardware
Flight Propellant System

Static Test Stand Systems
• Propellant System
• Maximize utilization of every component in
both systems
• Minimize long term costs
• Considerations:
• Capable of handling different engine sizes
and thrust levels
• Data Acquisition:
• Gather data on engine performance in order
to optimize the design for increased Isp
Static Test Stand
Propellant System
Static Test Stand

Subsystems

Precision Landing SystemSolution of drift problem
• Ram-air parachute to steer
• Using PID control theory
• First testing with RC car
• Starting with APM 2.6
• Ardurover (open source)
• Switching to Arduino
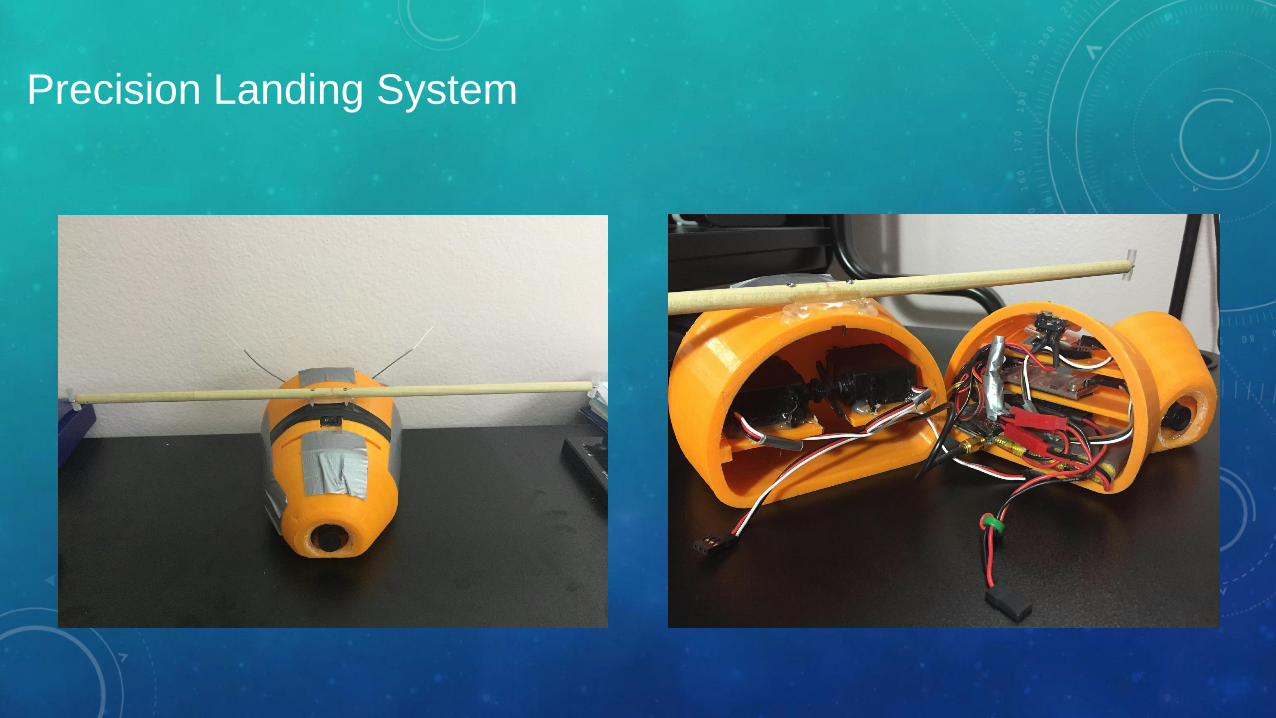
Precision Landing System

• Steerable Ram-Air Parachute
• Wireless camera with on screen display of real time flight data

Rockoon System Prototype 2 Avionics
• Fail-Safe Algorithms
• XTend 900 S1 RF Module: 40 miles communication range
• IMU: Measures the orientation of the platform
• TMP36 Temperature Sensor: Thermal management
• GSM Module: Send GPS coordinates through text message.
• GPS: Speed, heading, altitude, location
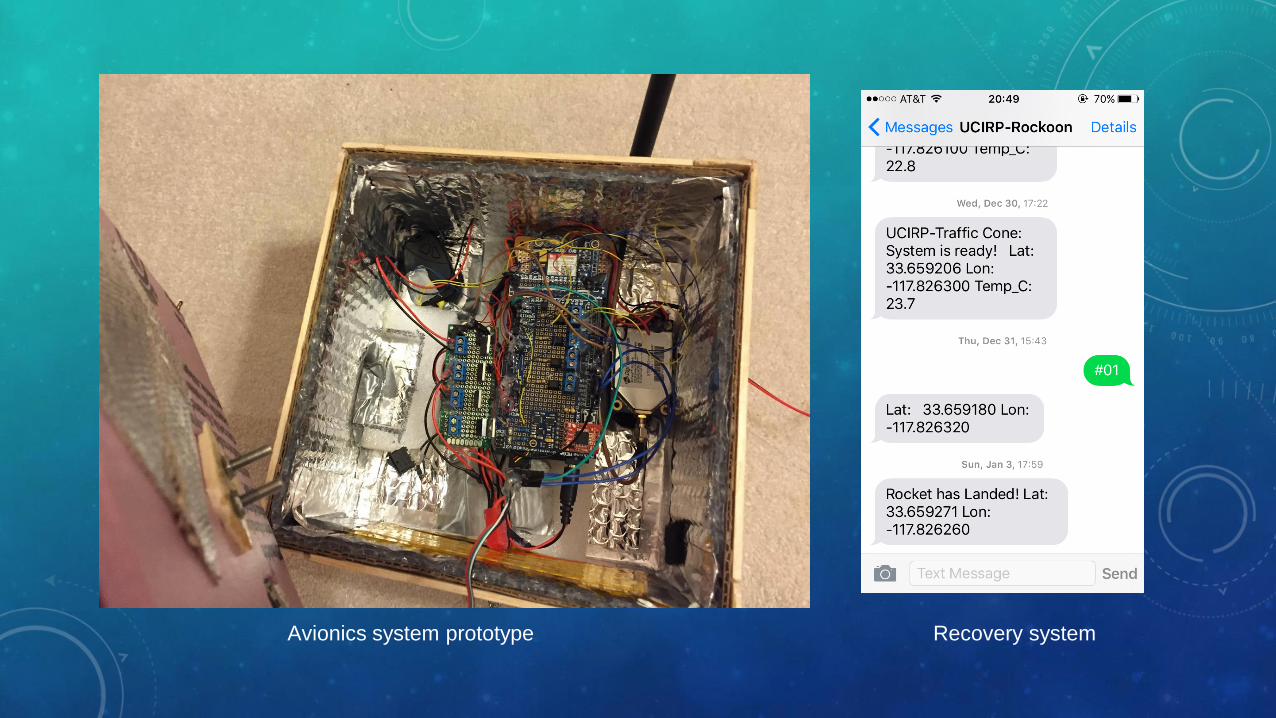
Avionics system prototype Recovery system
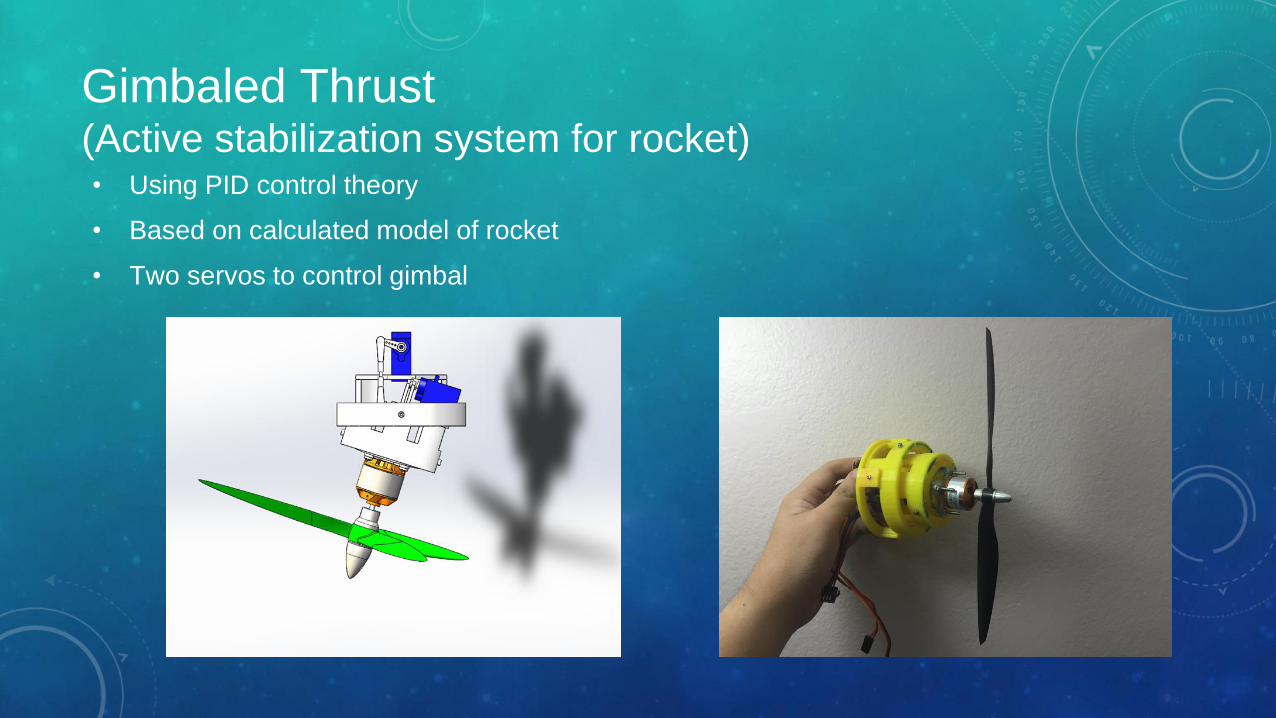
Gimbaled Thrust(Active stabilization system for rocket)• Using PID control theory
• Based on calculated model of rocket
• Two servos to control gimbal


Recent High Altitude Test



Flight Predictions
Cambridge University
University of
Michigan
Our Flight
Prediction


Project Phase Start End
Research/UROP Proposal 09/24/2015 11/02/2015
Design 09/24/2015 12/11/2015
Purchase 12/11/2015 01/04/2016
Fabrication 01/04/2016 03/18/2016
Avionics High Altitude Test 04/17/2016 05/08/2016
Report/Optimization 03/23/2016 06/10/2016
Rockoon System Prototype 2
Test
06/04/2016 06/04/2016
Hybrid Engine Static Fire Test 06/10/2016 06/20/2016
Project Timeline:


Questions?