Embed Size (px)
Citation preview

UAV activities at
Center for Autonomous Marine Operations and Systems
Department of Engineering Cybernetics
NTNU
Prof. Tor Arne Johansen
In collaboration with Profs. Thor I. Fossen and Lars Imsland

Outline • The Center for Autonomous Marine Oprations and Systems
• Our UAV research visions and strategy
• Our UAV platforms
• Current UAV-related research topics

Greener operations
Offshore renewable energy
Autonomous surveillance
Oil & gas in deeper water…
…. and in Arctic areas
Centre for Autonomous Marine
Operations and Systems
Hydrodynamics and Structural Mechanics
Guidance, Navigation and Control
Experiments
Knowledge fields & research methods
Interdisciplinary research areas &
challenges
AMOS
Center for Autonomous Marine Operations and Systems
Open water biological production

Department of Marine Technology
NTNU
Engineering Science and Technology
Centre for Autonomous Marine Operations and Systems (AMOS)
Information Technology, Mathematics and Electrical Engineering
Department of Engineering Cybernetics
SINTEF Fisheries and Aquaculture
SINTEF ICT
Statoil DNV
AMOS
MARINTEK
SINTEF
Values created by AMOS • Setting agenda for research, education and
innovations on important national areas
• Enabling research cooperation between
NTNU, SINTEF Group, Statoil, DNV,
national and international partners
• Provide top qualified 150-250 MSc and 60-
100 PhD candidates for industry and
academia
• Publications in internationally leading
journals and conferences
• Dissemination and knowledge transfer to
industry through candidates, research
institutes, and direct collaboration
• Accelerate innovations and spin-offs from
NTNU and partners
Bridging the gap between fundamental research, applications and innovation

International Collaborators
• Denmark Technical University, Denmark • Eindhoven University of Technology, Netherlands • University of Linköping, Sweden • Instituto Superior Técnico, Portugal • University of Porto, Portugal • CNR-INSEAN, Italy • University of California Berkeley, USA • Woods Hole Oceanographic Institution, USA • University of Newcastle, Australia • National Academy of Science of Ukraine, Ukraine • Jet Propulsion Laboratory, NASA, USA • University of Delaware, USA
National Collaborators, UAV related • Maritime Robotics AS • NORUT Tromsø • Discussions with several others as well

One of the main AMOS visions Coordinated highly autonomous marine operations involving UAS
together with marine surface and underwater assets
Environmental monitoring, oil spill response, inspection of fisheries, ice monitoring, search and rescue, science and climate research, situation awareness, communication relaying, survey, ship traffic monitoring, inspection of fish farms, offshore wind parks and other assets.

UAV Platform -> Data –> Information -> Decision -> Action
Applications System and
payload UAV
platform
Integrated operations Decision support Model-based data analysis Situation awareness Simultaneous operations
System integration, remote sensing, manipulation Real-time processing and sensor fusion Cooperative control and networking Sensor-based guidance and navigation
Fault tolerance Anti-icing Autonomous marine launch and recovery Navigation Communication Flight control Detect and avoid, transponders Airframe Power and propulsion
Our overall UAV Research strategy
Open architectures research platform and
in-house system integration capability!

Our UAV platforms (Operating licence from CAA / Luftfartstilsynet pending)
Skywalker X8 w/Ardupilot
UAV Factory Penguin B w/ Piccolo SL
3DRobotics hexa-copter w/Ardupilot Microdrone quad-copter
Five focused main research areas • Smart UAV remote sensing payloads - Autonomous
detection and tracking of objects and features • Robotic UAV payloads - Deployment, recovery and in-
situ data acquistion with UAV from ground/floating sensor nodes
• Multi-vehicle networking • Fault-tolerant and robust UAV navigation • Enabling ship-based UAV operations in remote and
harsh conditions
In addition there are several other UAV-related activities.
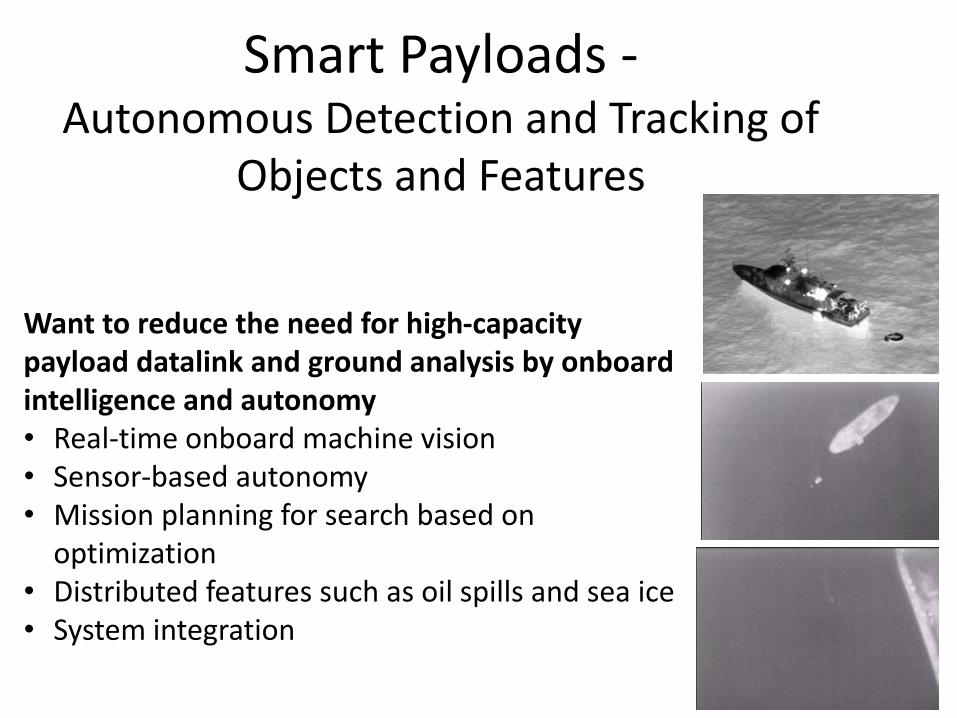
Smart Payloads - Autonomous Detection and Tracking of
Objects and Features
Want to reduce the need for high-capacity payload datalink and ground analysis by onboard intelligence and autonomy • Real-time onboard machine vision • Sensor-based autonomy • Mission planning for search based on
optimization • Distributed features such as oil spills and sea ice • System integration

Robotic Payloads - Deployment, recovery and in-situ data acquistion with UAV
from ground/floating sensor nodes
• Modular and smart floating sensor nodes • Multi-rotor UAV payloads for autonomous field deployment and
recovery of small objects • Fixed-wing UAV payloads for field deployment and recovery of
small objects • Data acquisition with UAVs
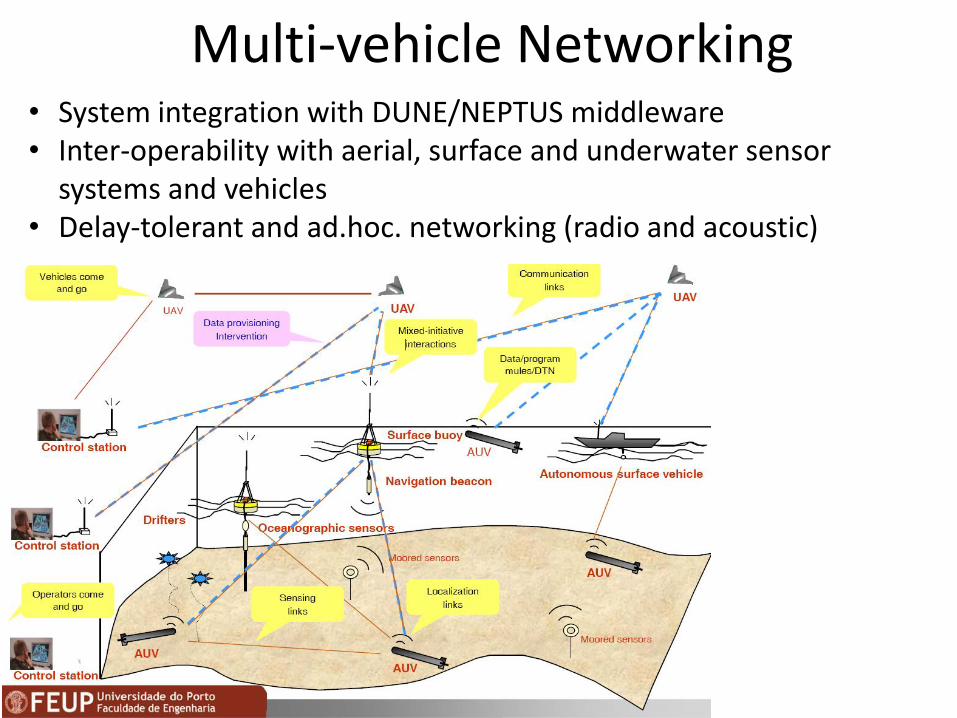
Multi-vehicle Networking • System integration with DUNE/NEPTUS middleware
• Inter-operability with aerial, surface and underwater sensor systems and vehicles
• Delay-tolerant and ad.hoc. networking (radio and acoustic)
Fault-tolerant and robust UAV navigation
Want to provide accurate, redundant and robust low-cost global navigation solutions, e.g. when GPS and compass fails: • Automatic airspeed sensor fault detection and diagnosis • Camera-based odometry and optical flow as an alternative to magnetometer • Camera-based terrain/landmark navigation • MEMS-based inertial navigation for navigation aiding and dead reckoning
• Standalone • Integrated with mathematical vehicle model • Integrated with camera-based systems • Integrated with RTK/DGPS • Other combinations
Accurate and reliable local navigation for precision tasks • camera, inertial, laser/LIDAR, radar, RTK/DGPS (moving baseline) for autonomous
launch/recovery, tracking, docking, pick-up and delivery
Enabling ship-based UAV operations in remote and harsh conditions
• Launch and recovery of fixed-wing UAVs from moving ships • Low-cost autonomous ship-based net recovery systems for fixed-
wing UAVs based on RTK/DPGS and local navigation • Low-speed recovery of UAVs with moving ship rendevouz
• Integration with ship systems (e.g. AIS and ship radar for airspace monitoring)
• Small UAV inflight anti-icing systems • Fault-detection and identification for early warning; identification
of icing (versus faults related to airspeed sensor, engine/fuel system, servos, etc.)
• Inflight anti-icing based on conductive coating (electric power); smart power control system design
• Fault-tolerant flight control in degraded conditions • Long-distance radio communication and networking
Concluding remarks
Our strategies and objectives are defined on a «More than 10 year» perspective • Build world-leading fundamental knowledge to extend academic state-of-the-art;
results will in most cases be open and published • Close collaboration with industry • Participate in technology demonstrators and challenging pilot projects with end users • Educate engineers and researchers to enchance capacity and innovation in Norway
UAV activity at NTNU has been on a modest level for some years, we are now boosting our activities in this area • National and international partnerships and collaboration with strong groups • Investment into infrastructure, equipment and own operational capacity • Focus on research platform with open architectures that allows own system
integration and extentions on top of state-of-the-art systems • Currently about 15 researchers and 20 master students working more or less full time
in this UAV activity at NTNU • New projects and collaborations will be established, also beyond maritime/offshore