Embed Size (px)
Citation preview

Tsunami Generation by Submarine Mass Failure.II: Predictive Equations and Case Studies
Philip Watts1; Stéphan T. Grilli, M.ASCE2; David R. Tappin3; and Gerard J. Fryer4
Abstract: Based on numerical simulations presented in Part I, we derive predictive empirical equations describing tsunami generation bysubmarine mass failure �SMF� that are only valid in the vicinity of the tsunami sources. We give equations for slides and slumps, alongwith some cautions about their appropriate use. We further discuss results obtained here and in Part I and their practical application to casestudies. We show that initial acceleration is the primary parameter describing SMF center of mass motion during tsunami generation. Weexplain an apparent paradox, raised in Part I, in slump center of mass motion, whereby the distance traveled is proportional to shearstrength along the failure plane. We stress that the usefulness of predictive equations depends on the quality of the parameters they relyon. Parameter ranges are discussed in the paper, and we propose a method to estimate slump motion and shear strength and discuss SMFthickness to length values, for case studies. We derive the analytical tools needed to characterize SMF tsunami sources in propagationmodels. Specifically, we quantify three-dimensional �3D� effects on tsunami characteristic amplitude, and we propose an analyticalmethod to specify initial 3D tsunami elevations, shortly after tsunami generation, in long wave tsunami propagation models. Thiscorresponds to treating SMF tsunami sources like coseismic displacement tsunami sources. We conduct four case studies of SMF tsunamisand show that our predictive equations can provide rapid rough estimates of overall tsunami observations that might be useful in crisissituations, when time is too short to run propagation models. Thus, for each case, we show that the characteristic tsunami amplitude is areasonable predictor of maximum runup in actual 3D geometry. We refer to the latter observation as the correspondence principle, whichwe propose to apply for rapid tsunami hazard assessment, in combination with the predictive tsunami amplitude equations.
DOI: 10.1061/�ASCE�0733-950X�2005�131:6�298�
CE Database subject headings: Tsunamis; Landslides; Experimentation; Boundary element method; Simulation; Case reports.
Introduction
In the recent past, tsunamis generated by submarine mass failures�SMFs� have received increased scrutiny in the research commu-nity. In particular, they have been the object of a number of labo-ratory and numerical modeling efforts �see Part I�, which showedthat they may represent a significant, and often overlooked, haz-ard for highly populated coastal communities. �Summaries of tsu-namis affecting the United States can be found in Lander andLockridge �1989�, Lander et al. �1993�, and Lander �1996�.�
In Part I of this work, we reported on detailed two-dimensional�2D� numerical and experimental analyses of SMF tsunamis. Weconcentrated on two idealized types of SMFs moving over planeslopes, representing end members for the general range of pos-sible SMF motions: underwater slides, which are translationalfailures, and slumps, which are rotational failures �see Fig. 1 of
1President, Applied Fluids Engineering, Inc., Long Beach, CA 90803.2Professor and Chair, Dept. of Ocean Engineering, Univ. of Rhode
Island, Narragansett, RI 02882.3British Geological Survey, Keyworth, Nottingham, NG12 5GG, UK.4Professor, Hawaii Institute of Geophysics and Planetology, Univ. of
Hawaii, Honolulu, HI 96822.Note. Discussion open until April 1, 2006. Separate discussions must
be submitted for individual papers. To extend the closing date by onemonth, a written request must be filed with the ASCE Managing Editor.The manuscript for this paper was submitted for review and possiblepublication on October 23, 2001; approved on March 29, 2005. Thispaper is part of the Journal of Waterway, Port, Coastal, and OceanEngineering, Vol. 131, No. 6, November 1, 2005. ©ASCE, ISSN 0733-
950X/2005/6-298–310/$25.00.298 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
Part I�. Specifically, we performed numerical simulations of tsu-namis caused by slides and slumps, with a 2D fully nonlinearpotential flow model �FNPF�, and we experimentally validatedresults for slides. In the simulations, the SMFs were assumed tohave a simple Gaussian shape, having the same thickness T andvolume V�=�BT /4, as a semiellipse of length B, by way of anadjustable spreading coefficient �� �0,1�. SMF kinematics wereobtained by expressing a dynamic balance of inertia, gravity,buoyancy, friction, and hydrodynamic forces, for the SMF centerof mass motion. This led to the definition of characteristic dis-tance So and time to of motion, for both slides and slumps, them-selves functions of governing geometric parameters �B ,T ,d ,��,where d denotes the initial SMF submergence depth and � theslope angle �Fig. 1, Part I�, water density �w, SMF density ��, andadded mass coefficient Cm. For slides, friction forces are mostlydue to hydrodynamic drag, represented by the drag coefficient Cd
and, for slumps, to basal friction, represented by the Coulombcoefficient Cn. The circular slump motion is further defined by aradius R and �a small� maximum angular displacement ��. Innumerical simulations, the intensity of tsunami generation wasrepresented by a characteristic amplitude �o, defined as the maxi-mum depression of the free surface above the initial location ofminimum submergence of the SMF �at x=xg; Fig. 1, Part I�.
In Part I, the 2D-FNPF model was used to assess shape spread-ing effects, and it was observed that the largest intial tsunamiamplitudes �o were created for the most compact SMFs, i.e.,those with �→1, making the SMF shape closest to semielliptical.Hence, although these are not realistic shapes, semiellipticalSMFs �such as used in the original simulations by Grilli and
Watts �1999�� appear to yield worst case scenarios and will beERING © ASCE / NOVEMBER/DECEMBER 2005

used in the analyses and simulations herein to derive predictiveequations for the maximum characteristic tsunami amplitude ofslides and slumps. �Therefore, with reference to definitions intro-duced in Part I, we will have b=B for all cases.�
We are aware of only three previous predictive tsunami ampli-tude equations with either sloping inclines or accelerating land-slides. One of two semiempirical equations proposed by Striemand Miloh �1976� is reproduced by Murty �1979�. The theoreticalequation of Pelinovsky and Poplavsky �1996� was shown to pro-duce reasonable tsunami amplitude predictions by Watts �2000�.Last of all, the works of Grilli and Watts �1999� and Goldfinger etal. �2000� provide predictive equations that are precursors to thework presented here.
The utility of our predictive equations for rapid tsunami hazardassessment will be illustrated by applying them to a few casestudies. In these, we use marine geology interpretations to esti-mate values of governing parameters. In some cases, we alsodemonstrate that the predictive equations can assist marine geol-ogy interpretations, when these are incomplete. In Part I, for in-stance, assuming a realsitic slump maximum displacement 2So,we showed considerable differences in the features of tsunamisgenerated by underwater slides or slumps. The choice betweenfrictionless, translational slides and cohesive, rotational slumpsrequires a local geological context. For example, marine cruisesand marine geology analyses have been essential for identifyingthe source of the 1998 Papua New Guinea tsunami as a slumpinstead of a slide and for gradually refining the proposed tsunamiscenario �Tappin et al. 1999, 2001, 2002, 2003�.
In the paper, we first derive predictive equations for slide andslump characteristic tsunami amplitudes. Then, we further discusskey parameters affecting SMF tsunami generation: initial accel-eration, shear strength in relation to slump center of mass motion,and thickness to length values and other geometrical parametersneeded for case studies. We then complete the analytical toolsneeded to characterize SMF tsunami sources; we quantify three-dimensional �3D� effects on tsunami characteristic amplitude, andwe propose an analytical method to specify initial 3D tsunamielevations. Finally, we conduct four case studies and, based onthese, we propose the correspondence principle as a tool for rapidtsunami hazard assessment.
Predictive Equations for Tsunami Amplitude
Tsunami Amplitude Fitting Procedure
We construct predictive equations for 2D characteristic tsunamiamplitude based on curve fitting results of numerical simulations,using the 2D-FNPF model and the methodology detailed in Part I.We perform 32 underwater slide �Table 1� and 12 underwaterslump numerical simulations �Table 2�, covering a wide range ofgoverning parameter values. We detail hereafter the derivation ofthe predictive equation for underwater slides, because these in-volve fewer independent quantities; the equation for slumps isobtained in the same manner.
As in Part I, we select the maximum depression above theinitial mass failure location at x=xg, as the characteristic tsunamiamplitude �o for which predictive curve fits are constructed �seeFig. 1, Part I�. In the numerical simulations for slides, we assumeno deformation and use the same constant dynamical coefficientsas in Part I, i.e., Cm=1, Cd=1, and Cn=0. Due to the strongcorrelation observed in Part I between landslide motion and tsu-
nami amplitude, we first define �o as proportional to the charac-JOURNAL OF WATERWAY, PORT, COASTAL, AND OC
teristic distance So, projected vertically. Then, we express the re-maining dependence of �o on the governing parameters�� ,T ,d ,��, in a separable form
�o = �So sin ��F�sin ��G� T
Tref�H� d
dref�I� �
�ref� �1�
where �F ,G ,H , I�=unknown functions; and Tref =0.2b sin �, a ref-erence thickness, dref =b sin �, a reference depth, and �ref =1.85, areference specific density, have been used to render parametersnondimensional. For underwater slumps, we further define a ref-erence radius of curvature, Rref =2b, and a reference angular dis-placement ��=0.349 radians �or 20°� and use the constant dy-namical coefficients introduced in Part I, i.e., Cm=1, Cd=0, andCn=So / �R cos ��.
In the curve fits, we assume that the unknown functions G ,H,and I take unit values for the reference thickness, depth, anddensity, respectively. Hence, the tsunami amplitude correspondingto the reference values of all of the parameters but � is�ref = �So sin ��F�sin ��. The functions in Eq. �1� can thus be in-dependently obtained by curve fitting numerical results for vari-ous combinations of reference values of the parameters. This isdetailed in the next section.
Prediction of 2D Tsunami Amplitude above Slides orSlumps
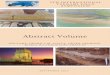
For slides, function F in Eq. �1� is found by curve fitting simula-tions made for different slope angles ���5,30�°, with T=Tref ,d=dref, and �=�ref �Cases 1–6 in Table 1�. Results are given inFig. 1�a�, and we see that F linearly increases with decreasingslope angle, perhaps due to increased tsunami generation effi-ciency for nearly horizontal landslides. If the separable form pro-posed for Eq. �1� is truly valid, then F’s functional relationship isunique and universal over the parameter range studied. Resultssimilarly obtained for functions G , H, and I are shown in Fig.1�b�. Thus, 13 simulations covering d /dref��0.69,3�, with slopeangles as aforementioned, while satisfying T=Tref and �=�ref
�Cases 7–16 in Table 1�, are seen to produce a single curveH�d /dref�, which is readily fit by a power function. The obtainedexponent is very close to the −1.25 �Green’s law� value found inPart I for the tsunami amplitude depth dependence. Similarly,function G�T /Tref� is found as another power function, based on13 additional numerical simulations covering T /Tref��0.46,2�,with slope angles as earlier, while satisfying d=dref and �=�ref
�Cases 17–26 in Table 1�. We see that tsunami amplitudes arenearly proportional to landslide thickness. Finally, the amplitudedependence to slide density is found by curve fitting results for 9more cases with slope angles as previously, while satisfyingd=dref and T=Tref �Cases 1, 3, 6, 27–32 in Table 1�. The deter-mination coefficient R2 of all the curve fits in Figs. 1�a and b� isvery close to unity, which, given the wide range of parametersinvolved in simulations, is a posteriori validation of the func-tional form of Eq. �1�.
Using the results of Figs. 1�a and b�, we express the predictiveequation of numerical results in Table 1 for slides in the form ofEq. �1�, round off the value of some coefficients �namely, 1 and−1.25 for the thickness and depth exponents, respectively�, and
perform a final curve fit of coefficients of function F. We findEAN ENGINEERING © ASCE / NOVEMBER/DECEMBER 2005 / 299

�o,2D = So�0.0574 − 0.0431 sin ���T
b��b sin �
d�1.25
�1 − e−2.2��−1��
�2�
where So defines the slide motion in Eq. �12�, Part I. �Note thatwe employ the subscript “2D” to indicate that our curve fits onlyapply to underwater landslides that satisfy the 2D criteria dis-cussed in Part I.� Fig. 1�c� shows a comparison of simulated tsu-nami amplitudes in Table 1 and those predicted by Eq. �2�. Theagreement is quite good, with an overall correlation coefficientr=0.997, translating into a ±3.4% accuracy of individual ampli-tude predictions, at one standard deviation. The range of validityof Eq. �2�, based on the data in Table 1, is ���5,30�°,d /d��0.06,1.5�, T /b��0.008,0.2�, and ���1.46,2.93�. As in PartI, we find an exponent of −1.25 for the tsunami amplitude depen-dence on submergence depth in Eq. �2�, based on the wider para-metric space covered in Table 1. This is similar to Green’s law,
Table 1. Parameters and Results for 2D Simulations of Tsunamis Cause
Case � � d /b d /dref T /b
1 1.85 5 0.087 1.00 0.017
2 1.85 10 0.174 1.00 0.035
3 1.85 15 0.259 1.00 0.052
4 1.85 20 0.342 1.00 0.068
5 1.85 25 0.423 1.00 0.085
6 1.85 30 0.500 1.00 0.100
7 1.85 5 0.060 0.69 0.017
1 1.85 5 0.087 1.00 0.017
8 1.85 5 0.170 1.95 0.017
9 1.85 5 0.250 2.87 0.017
10 1.85 15 0.200 0.77 0.052
3 1.85 15 0.259 1.00 0.052
11 1.85 15 0.500 1.93 0.052
12 1.85 15 0.625 2.41 0.052
13 1.85 15 0.750 2.90 0.052
6 1.85 30 0.500 1.00 0.100
14 1.85 30 0.750 1.50 0.100
15 1.85 30 1.000 2.00 0.100
16 1.85 30 1.500 3.00 0.100
17 1.85 5 0.087 1.00 0.008
18 1.85 5 0.087 1.00 0.013
1 1.85 5 0.087 1.00 0.017
19 1.85 5 0.087 1.00 0.025
20 1.85 5 0.087 1.00 0.034
21 1.85 15 0.259 1.00 0.025
3 1.85 15 0.259 1.00 0.052
22 1.85 15 0.259 1.00 0.075
23 1.85 15 0.259 1.00 0.076
24 1.85 15 0.259 1.00 0.100
25 1.85 30 0.500 1.00 0.050
6 1.85 30 0.500 1.00 0.100
26 1.85 30 0.500 1.00 0.200
27 1.46 5 0.087 1.00 0.017
28 2.93 5 0.087 1.00 0.017
29 1.46 15 0.259 1.00 0.052
30 2.93 15 0.259 1.00 0.052
31 1.46 30 0.500 1.00 0.100
32 2.93 30 0.500 1.00 0.100
which applies to tsunami runup along an inclined plane. By way
300 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
of contrast, Pelinovsky and Poplavsky �1996� found an exponentof −1 for tsunami generation in a constant depth channel. It ap-pears that the similar geometries between tsunami generation andtsunami runup on a sloping incline result in similar scaling withdepth. The power of 1 for T /b indicates that tsunamiamplitude also scales with nondimensional slide volume,V��=�T / �4b�.
We introduce the definition of So from Eqs. �13�–�15� in Part Iinto Eq. �2�, with �=1.85, to obtain
�o,2D 0.0286T�1 − 0.750 sin ���b sin �
d�1.25
�3�
where the maximum thickness provides the necessary dimensionof length. When the volume per unit width of the slide is dividedout of Eq. �3�, we find that the tsunami amplitude is a strongfunction of slope angle, a mild function of slide length, and a
igid Underwater Slides
T /Tref So /b �o /b �os� �op�
1.00 4.48 −0.0035 0.00884 0.00893
1.00 4.48 −0.0064 0.00828 0.00835
1.00 4.48 −0.0090 0.00773 0.00781
1.00 4.48 −0.0111 0.00723 0.00730
1.00 4.48 −0.0128 0.00675 0.00682
1.00 4.48 −0.0142 0.00633 0.00639
1.00 4.48 −0.0059 0.01522 0.01425
1.00 4.48 −0.0035 0.00884 0.00893
1.00 4.48 −0.0016 0.00399 0.00388
1.00 4.48 −0.0010 0.00257 0.00239
1.00 4.48 −0.0131 0.01131 0.01078
1.00 4.48 −0.0090 0.00773 0.00781
1.00 4.48 −0.0038 0.00324 0.00343
1.00 4.48 −0.0029 0.00246 0.00259
1.00 4.48 −0.0023 0.00198 0.00207
1.00 4.48 −0.0142 0.00633 0.00639
1.00 4.48 −0.0083 0.00372 0.00385
1.00 4.48 −0.0059 0.00265 0.00269
1.00 4.48 −0.0037 0.00167 0.00162
0.46 4.48 −0.0016 0.00407 0.00410
0.73 4.48 −0.0025 0.00643 0.00651
1.00 4.48 −0.0035 0.00884 0.00893
1.43 4.48 −0.0050 0.01278 0.01282
1.95 4.48 −0.0069 0.01759 0.01743
0.48 4.48 −0.0043 0.00367 0.00377
1.00 4.48 −0.0090 0.00773 0.00781
1.45 4.48 −0.0132 0.01136 0.01132
1.47 4.48 −0.0133 0.01150 0.01145
1.93 4.48 −0.0178 0.01537 0.01509
0.50 4.48 −0.0069 0.00306 0.00320
1.00 4.48 −0.0142 0.00633 0.00639
2.00 4.48 −0.0303 0.01353 0.01278
1.00 3.87 −0.0022 0.00643 0.00685
1.00 6.17 −0.0060 0.01109 0.00893
1.00 3.87 −0.0057 0.00567 0.00512
1.00 6.17 −0.0142 0.00890 0.00781
1.00 3.87 −0.0096 0.00496 0.00579
1.00 6.17 −0.0203 0.00660 0.00639
d by R
strong function of initial submergence. We conclude that under-
ERING © ASCE / NOVEMBER/DECEMBER 2005

water slide tsunami amplitude is primarily a function of SMFvolume, incline angle, and initial submergence.
Similarly, based on results of numerical experiments for casesin Table 2, we find an equation predicting the 2D characteristictsunami amplitude for slumps
�o,2D = So�0.131
sin ���T
b��b sin �
d�1.25� b
R�0.63
����0.39�1.47 − 0.35�� − 1���� − 1� �4�
where So defines the slump motion in Eq. �19�, Part I. Eq. �4� hasan accuracy of ±2.2% at one standard deviation. The last term inEq. �4� is unity when the specific density matches the referencevalue. The range of validity of Eq. �4�, based on the data in Table1, is ���10,30�°, d /b��0.34,0.5�, T /b��0.10,0.15�, R /b=�1,2�,��=�0.1,0.52�, and ���1.46,2.93�. The tsunami amplitude depthdependence in Eq. �4� takes the same form as for slides in Eq. �2�.Hence, owing to the close similarity observed in Part I for thegeneration of tsunamis by slumps and slides of identical geometryand initial motion, it can safely be inferred that the validity of Eq.�4� can be extended down to d /b=0.06. The same conclusionapplies to the effect of slump thickness, which also takes the sameform as for slides; hence, we can assume T /b0.2 applies. Thepower −0.63 for R /b is accurate to within about ±0.039, withR2=0.999. The power −1 for sin � is accurate to within about±0.077, with R2=0.998. It appears that another functional formcould be more accurate for these last two curve fits, but we favorsimplicity. The power 0.39 for �� is accurate to within ±0.005,with R2=0.999.
We introduce the definition of So from Eqs. �17�–�20� in Part Iinto Eq. �4� with �=1.85, to obtain
�o,2D 0.0654T�sin ��0.25�b
d�1.25�R
b�0.37
����1.39 �5�
When the volume per unit width of the slump is divided out ofEq. �5�, we find that the tsunami amplitude is a mild function ofincline angle, a mild function of slump length, a mild function ofradius of curvature, a strong function of initial submergence, anda strong function of angular displacement. We conclude thatslump tsunami amplitude is primarily a function of SMF volume,
Table 2. Parameters and Results for 2D Simulations of Tsunamis Cause
Case � � d /b T /b R /b
1 1.85 10 0.50 0.15 2
2 1.85 20 0.50 0.15 2
3 1.85 30 0.50 0.15 2
4 1.85 20 0.34 0.10 1
5 1.85 20 0.34 0.10 1.5
6 1.85 20 0.34 0.10 2
7 1.85 20 0.50 0.15 2
8 1.85 20 0.50 0.15 2
9 1.85 20 0.50 0.15 2
10 1.85 20 0.50 0.15 2
2 1.85 20 0.50 0.15 2
11 1.46 20 0.34 0.10 2
6 1.85 20 0.34 0.10 2
12 2.93 20 0.34 0.10 2
initial submergence, and angular displacement.
JOURNAL OF WATERWAY, PORT, COASTAL, AND OC
Appropriate Use of Amplitude Curve Fits
The analytical curve fits given here have an accuracy that is mea-sured against results of numerical experiments. They are validwithin the ranges of parameters mentioned earlier, but there is noguarantee as to their accuracy for other SMF geometries or mo-tions, which may form the large majority of real events. Specificcautionary notes need to be listed.
First of all, a 2D geometry limits applications to wide SMFsthat satisfy Eq. �23� in Part I, and our choice of characteristictsunami amplitude applies only above the SMF, without consid-eration of propagation effects. We develop a correction for 3Dgeometries later in this work.
Second, the curve fits imply significant interpolation. In thecases of slope angle and mass failure thickness, most realisticscenarios are covered here and interpolation to zero inclination��→0� or thickness �T /b→0� is considered highly accurate. Onthe other hand, the lower bound on submergence d /b�0.06 isneeded to avoid wave breaking and other nonlinear phenomenathat were not simulated �Watts 1998�. While the limit of vanish-ing d /b diverges and may introduce inaccuracies, the oppositelimit of large d /b can be considered accurate.
Last of all, we suggest that all applications of the curve fits bemade with estimates of the errors in landslide geometry and mo-tion tailored to each case study. Repeated application of the curvefits with different inputs �or taking partial derivatives of the am-plitude equations� will then yield expected errors in the tsunamifeatures. Hence, the confidence levels can be found for the results.
Practical Developments
In Part I and in the preceding predictive equations, we saw thattsunami generation requires several parameters that specify SMFshape and motion. These parameters are not necessarily availablefor any particular case study, and they will often not be availableprior to or immediately following a tsunami event. To be able tocarry out order of magnitude estimates of SMF tsunami amplitudeand wavelength, in the absence of accurate parameter values, wederive general scaling relations, or constraints, on parameters’
nderwater Slumps
�� So /b �o /b �os� �op�
0.35 1.83 −0.0049 0.0812 0.0784
0.35 1.83 −0.0054 0.0456 0.0462
0.35 1.83 −0.0063 0.0359 0.0344
0.52 1.07 −0.0079 0.0886 0.0898
0.52 1.31 −0.0094 0.0700 0.0695
0.52 1.51 −0.0103 0.0573 0.0580
0.1 1.83 −0.0010 0.0280 0.0284
0.14 1.83 −0.0015 0.0318 0.0323
0.17 1.83 −0.0021 0.0348 0.0353
0.28 1.83 −0.0040 0.0421 0.0424
0.35 1.83 −0.0054 0.0456 0.0462
0.52 1.91 −0.0065 0.0363 0.0351
0.52 1.51 −0.0103 0.0573 0.0580
0.52 1.18 −0.0161 0.0897 0.0895
d by U
expected ranges of variation in a field situation.
EAN ENGINEERING © ASCE / NOVEMBER/DECEMBER 2005 / 301

The Role of Initial Acceleration
In Part I, we presented underwater �rigid� slides and slumps astwo end members in the range of possible SMF motion andtreated them as distinct geological phenomena. For the assumedidealized geometry, we found that the first term in the Taylorseries expansion of center of mass position about t=0 isS�t�aot2 /2, for both underwater slides and slumps. The secondterms in the series have values of 16% for slides and 8% forslumps relative to the first term, respectively, when evaluated att= to. We thus find that the slide and slump center of mass motionduring t to is essentially governed by the initial acceleration ao.
Fig. 1. Tsunami amplitude curve fits for rigid slides based onresults of Table 1: �a� slope angle function, cases 1–6 ���,F= �9.34−6.10 sin ��10−2 with R2=0.999 �—�; �b� thicknessfunction, cases 7–16 ���, G=1.01�T /Tref�1.04 with R2=0.998 �- - - -�;depth function, cases 17–26 ���, H=1.02�d /dref�−1.27 withR2=0.997 �—�; and density function, cases 1, 3, 6, 27-32 ���,I=1.18�1−exp�−4.07�� /�ref −0.54��� �—-—�; �c� predicted �p� andsimulated �s� nondimensional tsunami amplitudes
�This is further illustrated in Fig. 9 of Part I.� Given that
302 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
ao=So / t2 in both cases, we can approximate these “accelera-tional” motions as S�t�So�t / to�2 /2, up until around t to, atwhich time S�to�0.5So �see Fig. 9, Part I�.
Simulations of tsunami generation in Part I indicate that thegeneration of the maximum initial surface depression aroundx=xg takes place during times t to �e.g., see Fig. 12�a�, Part I�.Beyond this time, the initial surface depression essentially “re-bounds” and propagates both onshore and offshore. This impliesthat the salient motion experienced during tsunami generation isthe center of mass acceleration, which can be described accu-rately by the initial acceleration. These observations justify using0.5So and to as the approximate distance and duration of accelera-tion, respectively, for slides and slumps.
Watts �2000� proposed an approximate solution for the 2D freesurface response to landslide acceleration at early times t0 inthe form ��t�−�kaot2 sin �� /2, where k represents the contribu-tion of SMF geometry to the tsunami amplitude �viz.,d /b ,� ,T /b, …�. �Note that this asymptotic approximation breaksdown by growing indefinitely in time.� After completion of themain tsunami generation at t t0, this approximation yields a 2Dcharacteristic tsunami amplitude, �o,2D0.5kSo sin �, in agree-ment with the idea that tsunami amplitude is proportional to ver-tical SMF displacement �Striem and Miloh 1976; Murty 1979;Watts 1998, 2000�. Our simulations in Part I and predictive Eqs.�2� and �4� indicate that k=0.005–0.030 over the range of under-water slides studied, and k=0.02–0.30 over the range of under-water slumps studied. These results show that underwater slumpsare one order of magnitude more efficient at tsunami generationrelative to underwater slides when normalized by their character-istic distance of motion.
Shear Strength and Slump Center of Mass Motion
Slump center of mass motion involves a radius of curvature R thatcan be difficult to reconstruct from bathymetric data, when itexists, or difficult to measure from seismic reflection data. As afirst approximation, we can estimate R by assuming the failuresurface is a parabolic arc of chord b and maximum depth T �asdefined in Fig. 1, Part I�. Solving analytically for the radius ofcurvature yields
R b2
8T�6�
Based on Eqs. �17� and �20� in Part I, the angular displacement�� of slumps can be found from either: �1� the linear distance2So=R�� traveled by the slump �given R or its aforementionedapproximation�; or �2� an estimate of the mean shear strengthalong the slump failure plane Su �note that this “characteristic”mean shear strength is both a spatial and a temporal average overthe failure plane during the entire slump motion�. In the lattercase, shear strength can be expressed according to the compileddata in Bardet �1997� for normally consolidated marine sedimentsas
Su� � 0.3��� − �w�g �7�
where =local depth of the failure plane. Assuming a small thick-ness to length ratio T /b�1, and averaging Eq. �7� along thefailure plane, we find the characteristic shear strength
Su 0.19��� − �w�gT �8�
Comparing Eqs. �7� and �8�, we see that the peak shear strength
�for =T� along the failure arc is approximately 60% larger thanERING © ASCE / NOVEMBER/DECEMBER 2005

the mean shear strength. Substituting Eq. �8� into Eqs. �17� and�20� from Part I �with b=B� yields ��=0.48 radians, or about27° for a typical slump. This result eliminates the paradox men-tioned in Part I; larger shear strengths do not increase the distanceof slump motion as one might conclude from rapid inspection ofEqs. �17� and �20�. Instead, slump motion and shear strengthshare the same scaling ���−�w�gT with respect to the force ofgravity.
We will show that Rb can usually be assumed. It followsthat a typical slump travels roughly 50% of its length. If the shearstrength Eq. �8� were uniformly valid, then all slumps wouldtravel this fraction of their length and have the same angulardisplacement. Eq. �8�, however, cannot be used to describe slumpmotion whenever the slump headwall coincides with a tectonicfault. In such cases, failure may be induced by a temporary burstof pressurized water within the control fault that reaches the pro-spective failure plane, pushing the sediment apart �Sibson 1981;Tappin et al. 2001, 2002; Martel 2004�. When this happens, themean shear strength Su, and hence the angular displacement, canbe expected to be considerably less than the value indicated byEq. �8�, because the slump should otherwise not have failed in theabsence of the presumably short duration water pressure. Localvariations in sediment composition can also vary the shearstrength coefficient in Eq. �8� by at least a factor of two, as canremolding of sediment along the failure plane during slump mo-tion �Bardet 1997�. Therefore, the actual angular displacement�� of a slump can in fact provide a measure of the departure ofthe characteristic shear strength from Eq. �8�.
SMF Thickness to Length Ratio
The approximate location for a SMF tsunami can often be in-ferred from nearshore observations, such as local runup maximaand/or time of arrival �Tappin et al. 1999, 2001�. Occasionally,underwater cable breaks, hydrophone records, or eyewitness ob-servations provide direct evidence of mass failure �Bjerrum 1971;Murty 1979; Kulikov et al. 1996; Caplan-Auerbach 2001�. SMFdimensions, however, are not usually available immediately fol-lowing a tsunami event. Hence, for rapid hazard assessment, thesedimensions must be estimated.
The initial SMF length b and mean depth d can usually befound from the bathymetry around the approximate SMF location,and can sometimes be corroborated from tsunami period or wave-length information. A typical SMF thickness T can be estimatedfrom the geometry of documented underwater slides and slumps,because these appear to have relatively consistent proportions.From surveys of SMF morphology, underwater slides typicallyexhibit maximum thickness to initial length ratios T /b of 0.5–2%;in contrast, underwater slumps often involve deep failure withmaximum T /b of 5–15% �Prior and Coleman 1979; Edgers andKarlsrud 1982; Schwab et al. 1993; Turner and Schuster 1996;McAdoo and Watts 2004; Hutton and Syvitski 2004; Tappin et al.2003; von Huene et al. 2004�. Hence, if a slide is the suspectedsource of a tsunami, then a thickness T0.01b should be withinabout a factor of two. On the other hand, if a cohesive slump isthe suspected source, then a typical thickness T0.1b can beexpected again within a factor of two. For a slump, this thicknessyields a typical radius of curvature R1.25b �Eq. �6��; in general,the radius of curvature is 1–2 times the slump length.
In Eqs. �3� and �5�, tsunami amplitudes are predicted to beproportional to T. Hence, the use of the preceding approximatethickness values may introduce errors of 100% �or a factor of
two� on the predicted characteristic tsunami amplitudes. TheJOURNAL OF WATERWAY, PORT, COASTAL, AND OC
choice between a slide or slump, however, alters the tsunami am-plitude by an order of magnitude �or a factor of ten�. The geo-logical choice between slide or slump therefore appears to bemuch more important than the precise SMF geometry. Schwab etal. �1993� estimate that nearly half of all SMF off the continentalUnited States appear to satisfy translational sliding, while theother half appear to satisfy rotational slumping. The distinction isbest made from local geological and sedimentary considerationswhenever such data is available. Nevertheless, observed tsunamifeatures can sometimes provide sufficient information with whichto choose one SMF model over another, as we shall see subse-quently in our case studies.
Analytical Tools
These refer to methods by which we approximately describe thegeneration of 3D SMF tsunamis, based on a few simple geometri-cal and geological parameters, and construct SMF tsunamisources that can be used for rapid hazard assessment or as initialconditions in standard tsunami propagation models.
Up until now, our tsunami amplitudes have been based onsimulation results of 2D SMFs. However, the 2D criteria estab-lished in Part I may only be met by less than half of all tsunami-genic SMFs; hence, 3D effects must be evaluated. In the follow-ing, we introduce a correction for such effects of SMF width onthe 2D tsunami amplitudes predicted by Eqs. �2�–�5�, and wepresent an analytical formulation of 3D SMF tsunami sources.
The Effect of SMF Width
For landslides of finite width w, tsunami propagation in the thirdspatial dimension �transverse� during tsunami generation will re-duce the 2D tsunami amplitude. This effect can only be preciselycalculated by performing 3D simulation of SMF tsunami genera-tion �e.g., Vogelman 2001; Grilli et al. 2002�. In this paper, weaim at only approximately estimating 3D propagation effectsthrough doing a simple mass balance.
Let an underwater landslide have a parabolic transverse pro-file. In the absence of transverse wave propagation and with auniform landslide length, the tsunami width would also be w andits transverse profile would also be parabolic. During the times oftsunami generation t to, the tsunami width will increase to ap-proximately w+�o, due to transverse propagation, where�o�characteristic wavelength given by Eq. �9�, Part I. The shapeof the transverse wave along y can be assumed solitary-like orsech2��y / �w+�o��, with a maximum at y=0 and exponentiallydecreasing leading edges as y becomes large. Coefficient � can bechosen to reduce the wave amplitude to a specified percentage ofits maximum amplitude at the transverse distance y=w+�o �forexample, �=3 reduces the amplitude to 1%�. The characteristic3D tsunami camplitude �o,3D can be expressed from conservationof mass �or cross-sectional tsunami area�, as in the scaling workof Hammack �1973� and Watts �1998�
�o,3D = �o,2D� w
w + �o� �9�
The meaning of the 2D criteria in Eq. �23�, Part I, is now clearer:As the failure width w becomes much larger than �o, the charac-teristic tsunami amplitude becomes unaffected by transversepropagation, i.e., 3D effects. On the other hand, as the failurewidth drops much below �o, the characteristic tsunami amplitude
can be reduced by an order of magnitude or more.EAN ENGINEERING © ASCE / NOVEMBER/DECEMBER 2005 / 303

Underwater slides and slumps differ substantially in theirwidths. Data reported �Schwab et al. 1993; McAdoo et al. 2000;Hutton and Syvitski 2004; Tappin et al. 2001; von Huene et al.2004� show that underwater slides are often narrow compared totheir length, with typical width w0.25b; underwater slumps arewider with typically a width that is comparable to their length,such that wb.
In both cases, the reduction in tsunami amplitude due to finiteslide width predicted by Eq. �9� also depends on characteristicwavelength and thus on water depth. Hence, it cannot be com-puted in advance. We show this explicitly for a slide. Assumingtypical values of the specific density �1.85, Coulomb frictioncoefficient Cn0, added mass coefficient Cm1, drag coefficientCd1, and using Eqs. �9� and �12�–�15� from Part I, withw=0.25b, Eq. �9� yields
�o,3D
�o,2D= �1 + 15.5� d
b sin ��−1
0.065�b sin �
d�10�
where the latter �geometrical series� approximation follows fromthe necessity to keep d / �b sin ���0.5 and thus avoid part of theslide from becoming subaerial �see Fig. 1, Part I�. Repeating thesame process for underwater slumps, we assume a typical value��0.48 and proceed to substitute Eqs. �9� and �17�–�20� fromPart I, as well as the typical values of R , T, and w discussedearlier into Eq. �9�, to obtain a similar expression
�o,3D
�o,2D= �1 + 2.06�d
b�−1
�11�
that does not depend on the slope angle. There is no generalsimplification of Eq. �11� possible, because one can expect under-water slumps with d0.24b, the radius of convergence for thegeometric series, that would prevent an accurate series expansion.
Simplified 3D Characteristic Amplitude Equations
In the absence of detailed information on SMF shape, an estimateof 3D characteristic tsunami amplitude in an order of magnitudesense remains possible by further simplifying the predictive tsu-nami amplitude equations. Thus, for an underwater slide, we sub-stitute T0.01b and Eq. �3� into Eq. �10� to obtain
�o,3D 1.74 10−5 b�1 − 0.750 sin ���b sin �
d�1.75
�12�
As would be expected, we find that the characteristic tsunamiamplitude reduces to a function of b , d, and �. The constraints toEq. �12� are �30°, and d /b�0.06. �Note that this equationinvolves the ratio of vertical extent of the slide to the local waterdepth, in a way very similar to an expression found by Watts�1998� for laboratory experiments.�
For underwater slumps, we substitute ��0.48, the typicalR1.25b and T0.1b values, and Eq. �5� into Eq. �11� to find
�o,3D 2.56 10−3 b�sin ��0.25�1 + 2.06�d
b�−1�b
d�1.25
�13�
which is also a function solely of b , d, and �. The constraints toEq. �13� are also �30° and d /b�0.06.
Turner and Schuster �1996� show that it is reasonable, as a firstapproximation, to assume that mass failure occurs along the entireslope in question, an assumption that completely constrains theindependent quantities b ,d ,� and allows for a rapid initial assess-
ment of SMF tsunami hazard along any given slope, using equa-304 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
tions such as Eqs. �12� or �13�. Note, as mentioned earlier, thatunderwater slumps require particular attention if the angular dis-placement is much less than the typical value used here, as thissignificantly reduces tsunami amplitude.
Approximate Initial 3D Tsunami Source
Surface elevations and kinematics for 3D SMF tsunamis havebeen calculated, e.g., by Grilli et al. �2002� and Enet et al. �2003�,using a 3D fully nonlinear potential flow model. For rapid tsu-nami hazard assessment, however, an approximate 3D SMF tsu-nami source can be derived around t= to from the characteristictsunami amplitude �o,3D, obtained from Eqs. �12� and �13�, andcharacteristic wavelength �o �Eq. �9�, Part I�, which both can bepredicted as a function of simple geometrical and material param-eters of the SMF.
This is particularly true when simulated 2D surface elevations,such as in Fig. 11, Part I, can be combined with these character-istic values and, as discussed earlier, a lateral solitary-like spread-ing assumed. When such 2D profiles are not available, an initialanalytical tsunami surface elevation can still be assumed that pro-vides similar features as seen in 2D simulation results �such as inFig. 11�a�, Part I�. This is achieved using a double Gaussian func-tion of x and a solitary-like variation in the y direction, centered atan initial SMF location �xo ,yo�
��x,y� −�o,3D
�minsech2��
y − yo
w + �o��exp�− � x − xo
�o�2�
− ��exp�− � x − �x − xo
�o�2�� �14�
where �3 may be assumed �see Vogelmann �2001� for addi-tional information�, and xo−�xxg. Both �� and �x are param-eters controlling the double Gaussian shape, for given xo and �o
values �Fig. 2 shows a few examples of shapes obtained fory=yo�, and �min denotes the minimum of the function on theright-hand side of Eq. �14� �excluding the amplitude�, which is acomplicated function of �� and �x. By varying these parameters,one can adjust the ratio �max /�min and the distance between thetwo extrema in the double Gaussian function, for instance, tomatch some of the computed 2D elevations in Fig. 11�a�, Part I.The sech2 function in Eq. �14� provides the lateral y variation.Fig. 3 gives an example of the 3D surface elevation, obtained forthe first 2D case in Fig. 2, which shares many qualitative features
Fig. 2. Examples of double Gaussian function for approximate 3Dtsunami elevations �Eq. �14��, with xo=10, y=yo, �o=5, and �� ,�x=�—� 0.83, 2; �- - - -� 0.83, 4; �—-—� 1.0, 2; �- - -� 1.2, 2
with 3D SMF tsunami sources such as, e.g., simulated by Grilli
ERING © ASCE / NOVEMBER/DECEMBER 2005

and Watts �2001� or Grilli et al. �2002�. Such a surface elevationcan be imported in long wave models and used as an initial con-dition to study tsunami propagation and inundation �see, e.g.,Watts et al. �2003b� for details�.
Assuming that around t= to, most of the tsunami energy ispotential energy, it is also reasonable, as a first approximation forrapid hazard assessment, to assume zero initial water velocitiesfor the initial wave condition represented by Eq. �14� �see Wattset al. �2003b� for additional discussions of this hypothesis�.
SMF Tsunami Case Studies
Case studies are presented here to illustrate how our predictiveequations can provide rapid SMF tsunami hazard assessment, inan order of magnitude sense, without need for running detailednumerical simulations of tsunami generation, propagation, andinundation. In contrast, Watts et al. �2003b� performed such de-tailed numerical simulations for some of the case studies pre-sented here, in order to compare results with detailed field surveysand/or eyewitness observations, which is an entirely differentpurpose.
For background information relative to most of the followingcase studies, the reader will be referred to other, more specificpublications.
The 1998 Papua New Guinea Tsunami
Good descriptions of marine surveys, seismic records, and eye-witness accounts have been presented for this event, which oc-curred in July 1998 off Papua New Guinea �Synolakis et al. 2002;Tappin et al. 1999, 2001, 2002, 2003�. The tsunami elevation,time of arrival, and longshore distribution of the more than 10 mwave�s� that struck Sissano Lagoon are all consistent with anunderwater slump occurring around 12 min after a �fairly small�main shock of moment magnitude Mw7. Seismic reflectionsurveys by Tappin et al. �2003� show a T=760-m-thick andb=4.5-km-long slump �T /b=0.17� that traveled approximately2So=766 m along the failure plane �or 17% of its length�. Tappinet al. �2001, 2002� identified the presence of stiff clays from corestaken along the slump failure plane. The slump volume, of
3
Fig. 3. Examples of double Gaussian function for approximate 3Dtsunami elevations �Eq. �14��, with �o,3D=1, xo=10, yo=0, �o=5,�=3, w=2, k�=0.83, and �x=2
V�6 km , experienced an average vertical drop of about 200 m,
JOURNAL OF WATERWAY, PORT, COASTAL, AND OC
yielding a potential energy release of around 2.21016 J �assum-ing a typical specific density of marine sediment �=1.85�, whichcorresponds to a moment magnitude Mw=7.7 earthquake, if allthe potential energy were to go into a single elastic rupture.
To apply our predictive amplitude equation, we first estimateR3.33 km from Eq. �6�, which agrees reasonably well with theseismic reflection data of Tappin et al. �2003�. Second, we find anangular displacement ��=2So /R=0.23 radians. The latter is atleast two times less than expected for a continental margin cov-ered by stiff clay, which may suggest the temporary involvementof a spike in water pressure within existing faults that triggeredthe slump. The slump width may extend up to 7 km according toseismic data, but we use the typical value w=b=4.5 km in ourcalculation, in order to remain conservative pending a more cer-tain interpretation. The initial depth at the middle of the slump isaround d=1.2 km, and the mean bottom slope near the slump isaround �=12°.
Applying Eqs. �17� and �20� in Part I, we calculate an initialacceleration ao=0.34 m/s2, a maximum velocity umax=11.4 m/s,a characteristic distance of motion So=383 m, and a characteristictime of motion to=34 s. Using the latter, Eq. �9� in Part I yields acharacteristic wavelength �o=3.7 km. For the local water depth d,the tsunami propagates as intermediate depth water waves.
As far as the applicability of our tsunami amplitude, Eq. �4�,the ratio d /b=0.27 is sufficiently large as to yield accurate re-sults, yet sufficiently small as to suggest weakly nonlinear tsu-nami generation �Watts 1998�. The value of R /b=0.74 is less thanunity, but this small extrapolation outside of the simulated rangewill lead to little error, given the small power of this ratio gov-erning tsunami generation in the equation. All other tsunami gen-eration parameters being within the expected ranges for the curvefit to apply, we find �o,2D=20.3 m. Eq. �9� provides the 3D tsu-nami amplitude correction factor w / �w+�o�=0.55, and we findthe 3D characteristic tsunami amplitude �depression� above theslump as �o,3D=11.2 m. This value is quite similar to the maxi-mum runup above sea level measured between 10 and 15 m infront of Sissano Lagoon �Kawata et al. 1999�. By way ofcomparison, we find a characteristic tsunami amplitude�o,3D=18.1 m from the less accurate Eq. �13�. The Ursell param-eter U=�o,3D�o
2 /h3=0.0024 indicates linear, dispersive wavepropagation in an open ocean with h=4 km �Watts 2000�. Ouranalyses therefore yield general wave features that are entirelyconsistent with observations and support the consensus in thescientific community that this catastrophic tsunami can be attrib-uted to a single SMF. These simple predictions were confirmed bythe detailed numerical simulations of Watts et al. �2003b�, whocalculated both earthquake tsunami and slump tsunami scenarios.
Solving for the mean shear strength from Eq. �17� of Part Igives Su=587 KPa over the entire failure surface. This shearstress is about two times less than the characteristic valueSu=1.23 MPa found from Eq. �8�, despite the slump occurring instiff clay, which implies that failure should not have occurred atall. The fact that failure did occur suggests that ground motionwas not directly responsible for the slump, especially since failureoccurred 12 min after the main shock. The presence of stiff clayalso rules out significant pore fluid diffusion over such a relativelyshort time scale. Tappin et al. �2001� proposed that the mass fail-ure was the result of a pressurized pulse of water, caused by theearthquake, transmitted through a control fault located along the
headwall of the slump.EAN ENGINEERING © ASCE / NOVEMBER/DECEMBER 2005 / 305

The 1994 Skagway, Alaska Tsunami
On November 3, 1994, about 30 min after lower low tide, 3–10106 m3 of loose alluvial sediment slid down the fjord, at vari-ous locations within Taiya inlet, causing a tsunami that destroyedmost of a railway dock and claimed the life of one constructionworker. Estimates of maximum tsunami elevation above sea levelrange from 3 m at the ore dock to 11 m at the ferry dock �Camp-bell 1995; Kulikov et al. 1996; Thomson et al. 2001�. No seismicactivity was recorded in the Skagway region. The landslides mayhave been triggered by a number of factors, including an excep-tional low tide, recent rip-rap overburden and pile removal opera-tions at the railway dock, artesian water flow through the adjacentmountain, and recent sedimentation from the Skagway river.
The silty glacial sediments found around Skagway lose almostall of their shear strength when acted on by modest strains orshear waves. Therefore, we expect these to fail as underwaterslides with no significant basal friction during failure �Cn0�. Acomplicated patchwork of interconnected landslides can resultfrom the undercutting of slopes or from retrogressive failures. Tocarry out a rapid case study with our predictive equations, weconsider the tsunami amplitudes produced by three plausible un-derwater slides in isolation, whose characteristics emerge fromvarious published references: slide A along the front of the Skag-way river delta, slide B southwest of the railway dock, and slide
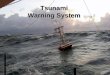
Fig. 4. Contour plot of Skagway harbor bathymetry and ap
C at the railway dock �see Fig. 4 and Watts et al. �2003b� for
306 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
details�. One possible mechanism is that retrogressive failurefrom either slide A or B led up the fjord floor to slide C �Camp-bell 1995; Plafker et al. 2000�. Table 3 provides approximateparameters for the selected slides and calculated kinematics, tsu-nami amplitude, and length, using Eqs. �9� and �13�–�15� fromPart I, as well as Eqs. �3� and �9� given previously.
The tsunami amplitudes in Table 3 enable a rapid relative as-
ate slide and dock locations in meters with arbitrary origin
Table 3. Skagway, Alaska, Approximate Slide Parameters
Parameter Unit Slide A Slide B Slide C
� — 1.85 1.85 1.85
b �m� 600 215 180
T �m� 15 15 20
w �m� 340 390 360
d �m� 150 95 24
� �°� 9 22 24
ao �m/s2� 0.46 1.10 1.20
ut �m/s� 35 33 31
So �m� 2,688 963 806
to �s� 77 30 26
�o �m� 2,935 904 399
�o,3D �m� 0.16 0.59 5.9
proxim
ERING © ASCE / NOVEMBER/DECEMBER 2005

sessment of tsunami generation by each one of the three slidesconsidered separately. These indicate that the majority of wavegeneration may be due to the shallower slide C, which yields acharacteristic tsunami amplitude �o,3D=5.9 m, close to the 9 melevation estimated from eyewitness accounts, of vertical motionof a barge moored next to the remaining portion of the railwaydock. Watts et al. �2003b� performed detailed numerical simula-tions of this event that confirm the more important role played byslide C in explaining observations and show a direct correspon-dence between the characteristic tsunami amplitude of slide Ccalculated here and maximum runup simulated or observed alongthe shoreline. Thus, the use of simple predictive equations essen-tially leads to identical general conclusions as in Watts et al.�2003b�, without need for running numerical simulations of theSkagway tsunami event.
The 1999 Izmit Bay Tsunami
On August 17, 1999, the Mw=7.4 Kocaeli earthquake generated adeadly tsunami within Izmit Bay, Turkey �Reilinger et al. 2000�.Observations and eyewitness accounts for this event were re-ported by Altinok et al. �1999� and Yalçiner et al. �1999�. IzmitBay has important strike-slip faults, part of the North AnatolianFault Zone, more or less parallel to the northern and southernshorelines �Altinok et al. 1999; Gökaan et al. 2001�. Several dif-ferent sources of potential tsunami generation within Izmit Baywere suggested; including a subsiding block bounded by normalfaults near the middle of a basin and strike-slip faults that canserve as control faults for SMF near the northern and southernshorelines. Given the magnitude of the main shock, it is reason-able to assume that all of these tsunami generation mechanismsoccurred at the same time. Eyewitness observations appear tovalidate this conjecture by reporting observed leading depressionwaves along both the northern and southern shores of Izmit Bay,almost immediately after the main shock, which suggests thatSMFs occurred near both shorelines �Yalçiner et al. 1999�.
Pending more definite answers, we conjecture that shorelinesubsidence and other observations reported at the town of Degir-mendere may be direct evidence of an underwater slump thatgenerated a local tsunami; a strike-slip control fault runs along theshoreline of the town, where significant parts of the waterfrontsubsided up to 20 m and experienced immediate tsunami attack ofat least 2.5 m above sea level, and the captain of a fishing vesselalso reported his boat being lifted at least 10 m further offshorewhile riding the crest of the tsunami almost immediately after themain shock. We will estimate shape parameters for this allegedslump from available observations and use our predictive equa-tions to infer a likely tsunami wave elevation.
Adopting a common rule of thumb, we assume that slumpingextended from the headwall near the shoreline down to the toe ofthe slope �Turner and Schuster 1996�. From bathymetry data forIzmit Bay, we find a slope length b=5 km, a mean slope angle�=5°, and a mean initial submergence d=0.5b sin �=218 m, offDegirmendere. Based on our preceding considerations, we as-sume a typical slump thickness T0.1b=500 m and a typicalslump width wb=5 km, where the assumed slump headwall isonly exposed along the part of the waterfront extending into IzmitBay, the rest being submerged offshore and out of sight. Verticalsubsidence of 20 m suggests a distance of slump motion of ap-proximately 2So230 m, from the sine of slope inclination. Witha radius of curvature R6.3 km from Eq. �6�, we calculate a
small angular displacement of ��=0.036 radians �which may beJOURNAL OF WATERWAY, PORT, COASTAL, AND OC
indicative of strong ground motion near the epicenter of the earth-quake forcing slump motion, rather than weak sediment or pres-surized water�.
We assume a specific density of �=1.85 and obtain an initialacceleration ao=0.053 m/s2, a maximum velocity umax=2.4 m/s,and a characteristic time of motion to=47 s �see Part I�. Thischaracteristic time of motion corresponds roughly to the durationof sea withdrawal observed immediately following the earth-quake. Applying Eq. �5�, we find the 2D characteristic tsunamiamplitude �o,2D=9.6 m. The characteristic wavelength is�o=2.2 km, which leads to a 3D tsunami amplitude factor of 0.69in Eq. �9�, and to �o,3D6.8 m �note that d /b=0.0440.06means this result is slightly extrapolated, and that we cannot usethe simplified Eq. �13� because ���0.48�.
Because of the large potential errors in most of the indepen-dent parameters, this amplitude should be interpreted only in anorder of magnitude sense. While much better characterization ofany potential slump is needed to refine these calculations, thisrapid case study shows that the slump hypothesis is consistentwith the available observations at Izmit Bay and may be worthyof further study �particularly of more extensive marine geologysurveys�.
The 1946 Unimak, Alaska Tsunami
The April 1, 1946, earthquake near Unimak Island, Alaska, pro-duced a devastating transoceanic tsunami. Assuming an earth-quake source, the large tsunami runup observed at the far distantisland of Hawaii required the main shock magnitude to be at leastMw=8 �Johnson and Satake 1997� and the coseismic vertical bot-tom displacement to reach 20 m �Mader and Curtis 1991; Taniokaand Seno 2001�.
Although clearly triggered by a large earthquake, this eventremains controversial for a number of reasons: �1� such a largecoseismic displacement is highly unlikely based on available geo-logical data; �2� the maximum tsunami runup relative to the earth-quake magnitude Mw yields the largest departure from knowncorrelations of any tsunami during the 20th century, including the1998 Papua New Guinea event; �3� even though there was largelocal damage as well as transoceanic tsunami damage, there was avery rapid drop in tsunami amplitude away from a straight lineleading from Unimak Island to the Marquesas Islands and Ant-arctica �Fryer et al. 2004�; and �4� GLORIA sidescan data revealsthat an underwater landslide scar exists in the tsunami sourceregion �Fryer et al. 2004�.
These contradictions and observations strongly suggest SMFtsunami generation �Fryer et al. 2004�. A long seismic rupture canproduce far field wave energy directivity perpendicular to thefault strike at the expense of focused near field wave activity.Along its axis of failure, however, a SMF can produce bothnear field and far field wave energy directivity �Iwasaki 1997;Watts 2001�. Our order of magnitude analyses can help explainthe aforementioned tsunami and geological features.
The starting point is the measured tsunami period of 15 min,which can yield SMF parameters along the continental slope fromthe 100-m-deep shelf down to the 7-km-deep waters of the Aleu-tian Trench, given a mean slope angle of �=4.3°. We assume anSMF was involved and use the tsunami period as a proxy forcharacteristic time to, to invert for either a slide lengthb40 km from Eqs. �13�–�15� in Part I, or a slump radius ofcurvature R2,347 km from Eq. �20� in Part I, both calculationsassuming �=1.85. Clearly, the underwater slide hypothesis is the
more reasonable of these two end members, and one could evenEAN ENGINEERING © ASCE / NOVEMBER/DECEMBER 2005 / 307

say that the huge radius of curvature is suggesting an underwaterslide by approaching infinity. The slide hypothesis agrees with thekey geological fact that much of the continental shelf should becovered by glacial till that fails as long slides along weaklayers �Hutton and Syvitski 2004�. More important, we findthat the slide length, with a characteristic slide thicknessT0.01b=400 m, is consistent with bathymetric and backscatterdata �Fryer et al. 2004�. This same data suggests a slide widthw25 km, slightly larger than the typical width but still realistic.Therefore, an existing underwater slide scar can account for theobserved tsunami period, but we need to see if it can also accountfor tsunami amplitude. We note that the failure area for this slideis limited to the upper trench slope; a broad terrace at 4 km depthhas not been disrupted by the slide, though slide debris is prob-ably scattered across it.
We calculate an initial acceleration ao=0.22 m/s2, a �theoret-ical� terminal velocity ut199 m/s, and a characteristic distanceof motion So179 km. Assuming that the headwall intersects thecontinental shelf at h=100 m �Fryer et al. 2004�, we find a meaninitial depth d=1.6 km for the slide. The characteristic wave-length is �0113 km—such a long tsunami would propagate asshallow water waves across the Pacific Basin—which leads to a3D tsunami amplitude factor of 0.18 in Eq. �9�. Using Eq. �3�, thecharacteristic tsunami amplitude above the slide is �o,3D32 m,where the ratio d /b=0.040.06 involves some extrapolation �bycomparison, the simplified Eq. �12� yields �0,3D17 m�. Thischaracteristic tsunami amplitude is similar to the more than 35 mrunup that led to the destruction of the lighthouse at Scotch Cap,on Unimak, which is more or less in line with the slide axis offailure. The characteristic tsunami wavelength on the shelf�0
�h /d28 km and the Ursell parameter U25,000 indicatenonlinear shallow water waves. Based on this order of magnitudecase study, we therefore hypothesize that the Scotch Cap light-house was attacked by a bore traversing the continental shelf.This hypothesis was verified in numerical simulations reported byWatts et al. �2003b� and, in more detail, by Fryer et al. �2004�.
The Correspondence Principle
The analytical and order of magnitude case studies presentedherein focused on tsunami generation near the source. For purely2D situations, an approximate one-on-one correspondence be-tween the characteristic tsunami amplitude at the source and themaximum runup was found in Part I �Fig. 13�b�, Part I,d /dref �1�. Watts et al. �2003b� performed complete numericalsimulations for most of the case studies presented here, whichincluded propagation and inundation beyond the source region,and observed a similar correspondance with runup calculatedalong the nearest shoreline.
In the absence of more accurate predictions, we therefore pro-pose a correspondence principle that states: “The characteristictsunami amplitude at generation approximates the maximumrunup of local tsunamis generated by an SMF.” This correspon-dence arises because, in many cases, wave front spreading duringpropagation, which reduces tsunami amplitude, is somewhat com-pensated for by shoaling and refractive focusing during inunda-tion, which rebuild tsunami amplitude. This principle is not in-tended to replace detailed numerical simulations of tsunamipropagation and inundation, especially because it does not indi-cate where maximum runup will occur. Nevertheless, the abilityof this principle to provide a rapid estimate of the local tsunami
hazard was demonstrated in the preceding case studies, in which308 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
we were able to predict observed runup values in an order ofmagnitude sense.
Note that a similar correspondence principle exists betweenvertical coseismic displacement and maximum runup for earth-quake tsunamis, with maximum runup typically being twice thevertical coseismic displacement.
Conclusions
Rapid tsunami hazard assessment, in addition to its obvious im-portance in crisis situations, is useful for interpreting marine ge-ology data to find a tsunami source, for proposing a more carefulstudy of SMF tsunami hazards, for identifying SMF tsunamisfrom tsunami field data, and for constructing tsunami hazard sce-narios, among other applications.
We present simple analytical tools to predict SMF tsunamigeneration. After developing empirical predictive equations forthe characteristic amplitude of tsunamis caused by slides andslump, based on 2D numerical simulations detailed in Part I, weexplain the role played by SMF initial acceleration in tsunamigeneration. We show it is the main descriptor of center of massmotion during tsunami generation and demonstrate the connectionbetween initial acceleration and our scaling analyses. Theseanalyses further indicate that most SMF parameters with the di-mension of length can be related to SMF length. We show thatSMF width can have an important impact on the 3D characteristictsunami amplitude, and we quantify this impact. We demonstratethat slumps may be more efficient tsunami sources than slides andsolve an apparent paradox in the slump center of mass motion,whereby the distance traveled is proportional to the shearstrength. The distance traveled is instead expressed as a departureof shear strength from proportional to overburden. For rapid SMFtsunami source estimate, we propose an analytical expression forthe 3D tsunami elevation, a function of characteristic tsunamiamplitude and wavelength.
Case studies of four potential SMF tsunami events show thatour simple analyses can describe many tsunami features and insome cases can reproduce important eyewitness accounts. We findthat such simple estimates agree quite well with the more detailedresults of Watts et al. �2003b�, which we consider to validate themuch simpler approach presented here. We conclude that thecharacteristic tsunami amplitude is also a reasonable estimate ofmaximum runup in a 3D geometry and, therefore, propose thecorrespondence principle as an extension of the case studies pre-sented here. We surmise that tsunami source �or geological event�characterization, i.e., definition of the relevant marine geologydata, is the most critical research activity for tsunamis caused bySMF. We expect more accurate versions of our analyses and toolsto appear as research progresses.
We finally point out that our predictive equations have beenused in other tsunami work, but a full account of their derivationhad not yet been given. More specifically, these equations helpedidentify the most likely tsunami source found during a marinesurvey �Fryer et al. 2004; Tappin et al. 1999, 2001; Watts 2001�,provided estimates of tsunami amplitudes for existing landslidescars �Goldfinger et al. 2000; McAdoo and Watts 2004; vonHuene et al. 2004; Watts et al. 2003a,b�, were used to assessprobabilistic tsunami hazards within a Monte-Carlo scheme�Watts 2003, 2004�, and helped plan underwater landslideexperimental work �Enet et al. 2003�, among other possible ap-
plications.ERING © ASCE / NOVEMBER/DECEMBER 2005

Acknowledgments
The writers wish to acknowledge Applied Fluids Engineering,Inc., for extended support of this research. Partial support for thiswork was provided by the Federal Emergency ManagementAgency under grant DR-1008-9004 made to Costas Synolakis atthe University of Southern California and by the National ScienceFoundation under research grant CMS-0100223, made to StephanGrilli at the University of Rhode Island. Slava Gusiakov andMike Blackford provided data regarding the frequency and inten-sity of tsunamigenic underwater landslides. The writers benefitedfrom discussions with Jose Borrero, George Plafker, Costas Syno-lakis, and Ahmet Yalçiner. David Tappin publishes by permissionof the British Geological Survey, Natural Environment ResearchCouncil, United Kingdom.
Notation
The following symbols are used in this paper:ao � initial acceleration;b � length of SMF along slope;
Cd � hydrodynamic drag coefficient;Cm � hydrodynamic added mass coefficient;Cn � basal Coulomb friction coefficient;
d � initial SMF minimum submergence;g � gravitational acceleration;h � local water depth;
Mw � earthquake magnitude;R � slump radius of curvature;So � characteristic length scale of SMF motion;Su � sediment shear strength;T � SMF thickness;t � time;
to � characteristic time scale of SMF motion;U � Ursell parameter;
umax � slump maximum velocity;ut � landslide terminal velocity;w � width of SMF;� � SMF specific density;
�� � slump angular displacement;� � free surface elevation;� � slope angle from horizontal;
�o � characteristic near-field tsunami wavelength;�� � SMF bulk density; and�w � density of water.
References
Altinok, Y., Alpar, B., Ersoy, S., and Yalçiner, A. C. �1999�. “Tsunamigeneration of the Kocaeli earthquake �August 17th 1999� in IzmitBay: Coastal observations, bathymetry, and seismic data.” Turkish J.Marine Sciences, 5�3�,131–148.
Bardet, J.-P. �1997�. Experimental soil mechanics, Prentice-Hall, UpperSaddle River, N.J.
Bjerrum, L. �1971�. “Subaqueous slope failures in Norwegian fjords.”Nor. Geotech. Inst. Bull., 88, 1–8.
Campbell, B. A. �1995�. Report of a seafloor instability at Skagway,Alaska, November 3, 1994, Campbell and Associates, Anchorage,Alaska.
Caplan-Auerbach, J., Fox, C. G., and Duennebier, F. K. �2001�. “Hydroa-
coustic detection of submarine landslides on Kilauea volcano.”JOURNAL OF WATERWAY, PORT, COASTAL, AND OC
Geophys. Res. Lett., 28�9�, 1811–1813.Edgers, L., and Karlsrud, K. �1982�. “Soil flows generated by submarine
slides: Case studies and consequences.” Nor. Geotech. Inst. Bull.,143, 1–11.
Enet, F., Grilli, S. T., and Watts, P. �2003�. “Laboratory experiments fortsunamis generated by underwater landslides: Comparison with nu-merical modeling.” Proc. 13th Offshore and Polar Engineering Conf.,International Society of offshore and Polar Engineering, Cupertino,Calif., 3, 372–379.
Fryer, G. J., Watts, P., and Pratson, L. F. �2004�. “Source of the greattsunami of 1 April 1946: A landslide in the upper Aleutian forearc.”Mar. Geol., 203, 201–218.
Gökaan, E., et al. �2001�. “Active tectonics of the Izmit Gulf �NE Mar-mara Sea�: From high resolution seismic and multi-beam bathymetrydata.” Mar. Geol. 175, 273–296.
Goldfinger, C., Kulm, L. D., McNeill, L. C., and Watts, P. �2000�. “Super-scale failure of the Southern Oregon Cascadia Margin.” Pure Appl.Geophys., 157, 1189–1226.
Grilli, S. T., Vogelmann, S., and Watts, P. �2002�. “Development of a 3Dnumerical wave tank for modeling tsunami generation by underwaterlandslides.” Eng. Anal. Boundary Elem., 26�4�, 301–313.
Grilli, S. T., and Watts, P. �1999�. “Modeling of waves generated by amoving submerged body: Applications to underwater landslides.”Eng. Anal. Boundary Elem., 23�8�, 645–656.
Grilli, S. T., and Watts, P. �2001�. “Modeling of tsunami generation by anunderwater landslide in a 3D numerical wave tank.” Proc., 11th Off-shore and Polar Engineering Conf., International Society of Offshoreand Polar Engineering, Cupertino, Calif., Norway, 3, 132–139.
Hammack, J. L. �1973�. “A note on tsunamis: Their generation and propa-gation in an ocean of uniform depth.” J. Fluid Mech., 60, 769–799.
Hutton, E. W., and Syvitski, J. P. �2004�. “Advances in the numericalmodeling of sediment failure during the development of a continentalmargin.” Mar. Geol., 203�3�, 367–380
Iwasaki, S. �1997�. “The wave forms and directivity of a tsunami gener-ated by an earthquake and a landslide.” Sci. Tsunami Hazards, 15,23–40.
Johnson, J. M., and Satake, K. �1997�. “Estimation of seismic momentand slip distribution of the April 1, 1946, Aleutian tsunami earth-quake.” J. Geophys. Res., 102, 11765–11774.
Kawata, Y., et al. �1999�. “Tsunami in Papua New Guinea was intense asfirst thought.” EOS Trans. Am. Geophys. Union, 80�9�, 101.
Kulikov, E. A., Rabinovich, A. B., Thomson, R. E., and Bornhold, B. D.�1996�. “The landslide tsunami of November 3, 1994, Skagwayharbor, Alaska.” J. Geophys. Res., 101�3�, 6609–6615.
Lander, J. F. �1996�. “Tsunamis affecting Alaska 1737–1996.” Publication 31, National Geophysical Data Center, Boulder,Colo.
Lander, J. F., and Lockridge, P. A. �1989�. “United States tsunamis 1890–1988.” Publication 41-2, National Geophysical Data Center, Boulder,Colo.
Lander, J. F., Lockridge, P. A., and Kozuch, M. J. �1993�. “Tsunamisaffecting the west coast of the United States 1806–1992.” Publication29, National Geophysical Data Center, Boulder, Colo.
Mader, C. L., and Curtis, G. �1991�. “Modeling Hilo, Hawaii tsunamiinundation.” Sci. Tsunami Hazards, 9, 85–94.
Martel, S. J. �2004�. “Mechanics of landslide initiation as a shear fracturephenomenon.” Mar. Geol., 203�3�, 319–339.
McAdoo, B. G., Pratson, L. F., and Orange, D. L. �2000�. “Submarinelandslide geomorphology, US continental slope.” Mar. Geol., 169,103–136.
McAdoo, B. G., and Watts, P. �2004�. “Tsunami hazard from submarinelandslides on the Oregon continental slope.” Mar. Geol., 203,235–245.
Murty, T. S. �1979�. “Submarine slide-generated water waves in KitimatInlet, British Columbia.” J. Geophys. Res., 84�12�, 7777–7779.
Pelinovsky, E., and Poplavsky, A. �1996�. “Simplified model of tsunamigeneration by submarine landslide.” Phys. Chem. Earth, Part A SolidEarth Geod., 21�12�, 13–17.
Plafker, G., Greene, H. G., Maher, N., and Synolakis, C. E. �2000�.
EAN ENGINEERING © ASCE / NOVEMBER/DECEMBER 2005 / 309

“Mechanism of the November 3, 1994 submarine landslide and asso-ciated landslide-generated tsunami at Skagway, Alaska.” EOS Trans.Am. Geophys. Union, 81�48�, 759.
Prior, D. B., and Coleman, J. M. �1979�. “Submarine landslides: Geom-etry and nomenclature.” Z. Geomorph. N. F., 23�4�, 415–426.
Reilinger, R., Toksoz, N., McCluskey, S., and Barka, A. �2000�. “1999Izmit, Turkey earthquake was no surprise.” GSA Today, 10.
Schwab, W. C., Lee, H. J., and Twichell, D. C. �1993�. “Submarine land-slides: Selected studies in the U.S. exclusive economic zone.” Bulletin2002, U.S. Geological Survey, Reston, Va.
Sibson, R. H. �1981�. “Controls on low stress hydro-fracture dilatancy inthrust wrench and normal fault terranes.” Nature, 289, 665–667.
Striem, H. L., and Miloh, T. �1976�. “Tsunamis induced by submarineslumpings off the coast of Israel.” Int. Hydrogr. Rev, 2, 41–55.
Synolakis, C. E., et al. �2002�. “The slump origin of the 1998 Papua NewGuinea tsunami.” Proc. R. Soc. London, Ser. A, 458, 763–790.
Tanioka, Y., and Seno, T. �2001�. “Detailed analysis of tsunami wave-forms generated by the 1946 Aleutian tsunami earthquake.” Nat.Hazards Earth Syst. Sci., 1, 171–175.
Tappin, D. R., et al. �1999�. “Offshore surveys identify sediment slump aslikely cause of devastating Papua New Guinea tsunami 1998.” EOSTrans. Am. Geophys. Union, 80�30�, 329.
Tappin, D. R., Watts, P., and Matsumoto, T. �2003�. “Architecture andfailure mechanism of the offshore slump responsible for the 1998Papua New Guinea tsunami.” Submarine mass movements and theirconsequences, J. Locat and J. Mienert, eds., Kluwer, Dordrecht, TheNetherlands, 383–389.
Tappin, D. R., Watts, P., McMurtry, G. M., Lafoy, Y., and Matsumoto, T.�2001�. “The Sissano, Papua New Guinea tsunami of July 1998—offshore evidence on the source mechanism.” Mar. Geol., 175, 1–23.
Tappin, D. R., Watts, P., McMurtry, G. M., Lafoy, Y., and Matsumoto, T.�2002�. “Prediction of slump generated tsunamis: The July 17th 1998Papua New Guinea event.” Sci. Tsunami Hazards, 20�4�, 222–238.
Thomson, R. E., Rabinovich, A. B., Kulikov, E. A., Fine, I. V., and
310 / JOURNAL OF WATERWAY, PORT, COASTAL, AND OCEAN ENGINE
Bornhold, B. D. �2001�. “Numerical simulation of the landslide-generated tsunami of November 3, 1994 in Skagway Harbor, Alaska.”Tsunami research at the end of a critical decade, G. T. Hebenstreit,ed., Kluwer, Dordrecht, The Netherlands, 243–282.
Turner, A. K., and Schuster, R. L. �1996�. “Landslides: Investigation andmitigation.” Special Rep. 247, Transportation Research Board, Wash-ington, D.C.
Vogelmann, S. �2001�. “Sensitivity study of numerical simulation oftsunamis generated by submarine slope failure.” M S thesis, Univ. ofRhode Island, Kingston, R. I.
von Huene, R., Ranero, C. R., and Watts, P. �2004�. “Tsunamigenic slopefailure along the Middle America Trench in two tectonic settings.”Mar. Geol., 203, 303–317.
Watts, P. �1998�. “Wavemaker curves for tsunamis generated by under-water landslides.” J. Waterw., Port, Coastal, Ocean Eng., 124�3�,127–137.
Watts, P. �2000�. “Tsunami features of solid block underwater landslides.”J. Waterw., Port, Coastal, Ocean Eng., 126�3�, 144–152.
Watts, P. �2001�. “Some opportunities of the landslide tsunami hypoth-esis:” Sci. Tsunami Hazards, 19�3�, 126–149.
Watts, P. �2003�. “Probabilistic analyses of landslide tsunami hazards.”Submarine mass movements and their consequences, J. Locat and J.Mienert, eds., Kluwer, Dordrecht, The Netherlands, 163–170.
Watts, P., �2004�. “Probabilistic predictions of landslide tsunamis offSouthern California.” Mar. Geol., 203, 281–301.
Watts, P., Grilli, S. T., and Kirby, J. T. �2003a�. “Tsunami hazards atSkagway, Alaska.” J. Geophys. Res., in revision.
Watts, P., Grilli, S. T., Kirby, J. T., Fryer, G. J., and Tappin, D. R.�2003b�. “Landslide tsunami case studies using a Boussinesq modeland a fully nonlinear tsunami generation model.” Nat. Hazards EarthSyst. Sci., 3, 391–402.
Yalçiner, A. C., et al. �1999�. “Tsunami generation in Izmit Bay by the1999 Izmit Earthquake.” Proc., Conf. on the 1999 Kocaeli Earth-quake, Istanbul Technical University, Istanbul, Turkey, 217–221.
ERING © ASCE / NOVEMBER/DECEMBER 2005