Embed Size (px)
Citation preview

Transient Stability Analysis of Inverter-Interfaced Distributed Generators in a Microgrid System
F. Andrade, J. Cusidó, L. RomeralMotion Control & Industrial Applications Center, MCIA
Universitat Politècnica de Catalunya. CTM Centre Tecnològic
Intelligent Microgrids integrate different energy resources, especially renewable source, to provide dependable, efficient operations, while works connected to the grid or islanding mode.
It can be ensured an uninterrupted reliable flow of power, economic and environmental benefits while minimizing energy loss through transmission over long distances.
The use of intelligent power interfaces between the renewable source and the grid is required.
MATHEMATICAL MODEL
INTRODUCTION
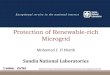
Each generator has a power DC renewable source, a DC/AC inverter, a low pass filter and it is managed by two control loops
The study shows:
a mathematic model of a Microgrid system in stand-alone based in parallel connected inverters
works with no-lineal tool and computer simulations, phase-plane trajectory analysis and method of Lyapunov for evaluate the limits of the small signal models.
Fig 2: Methodologies applied for bearing diagnosis.
Inverter 1
1V
1I
2V
2I
Inverter 2
PQ
LowFilter
Droop curves
V-I CONTROL
PQ
LowFilter
Droop curves
V-I CONTROL
Z
1ZRenewableSource 1
RenewableSource 2
2Z
Electric Utility
Fig 1: Connected Microgrid system based in power electronic interfaces.
Microgrid
The PQ controller: QkVVPk vipi 00
Variable Value UnitOperating Voltage range 218,5 – 241,5 VrmsOperating Frequency range 49 - 51 HzFreq. droop coefficient (Kp1 = Kp2) 1,33e-4 rad.s-1/W
Voltage droop coefficient (Kv1 = Kv2) 0.0015 V/VAR
Cutoff frequency filter 5 Hz
The power angle between both generators: 2112
1221
22
22
42
122121
21
41
122122
42
122121
41
cos63.063.01011
cos63.063.0104.1
sin63.01082
sin63.01067
VVVVQ
VVVVQ
VVVP
VVVP
)cos(0307.00307.04.31102.7
)cos(0307.00307.04.31102.7
)sin(0027.0104.34.31108.9
)sin(0027.0108.24.31108.9
)(
154255
35
154244
34
15425
53
33
15424
52
32
321
XXXXXX
XXXXXX
XXXXXX
XXXXXX
XXX
Xf
iii
iii
QVV
P
0482.04.31102.7
0042.04.31108.93
3
Working in the time domain:
The PQ power:
The whole model:
Equilibrium points
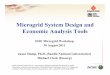
Fig 3: the equilibrium point X0 the range of the variable X5
The equilibrium point X0=[0.0019 320.1 320.1 239.7 239.6]
)cos(0307.00307.04.31102.70
)cos(0307.00307.04.31102.70
)sin(0027.0104.34.31108.90
)sin(0027.0108.24.31108.90
0
0)(
154255
3
154244
3
15425
53
3
15424
52
3
32
XXXXX
XXXXX
XXXXX
XXXXX
XX
Xf
220 230 240 250 260-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15Set of state equation in function of X5
X5
f1(X)f2(X)f3(X)f4(X)f5(X)
X0

STABILITY OF THE SYSTEM
CONCLUSIONS
In this paper, a nonlinear state-space model of a Microgrid is presented. The model includes the most important dynamics. The no-linear model can find the equilibrium points. The model has been analyzed by means of both studies, first, a study of small signal stability by mean of linearization and root locus plot and transient stability by mean of Lyapunov function.
The studies of small signal could be done for adjustment the controller and improve the transient response and the steady-state error. Using that Lyapunov function the region of asymptotic stability, the size of the disturbed and his duration time could be determined. These tools will allow the design of Microgrid systems with loads, generators and storage systems assuring the global stability of the system.
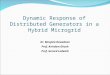
Using the Jacobian matrix of f(X) at the equilibrium point.
Fig 4: Root locus for 1.3e-4< Kp <7.8e-4
An analysis of the equilibrium point and small-signal stability
0
)()(
)()(
5
5
5
5
5
1
1
1
XXXf
XXf
XXf
XXf
A
407.393599.70000.00000.0363.2
3597.7407.390000.00000.0363.2
0162.00009.004.320000.090.153
0009.00145.00000.004.329.153
0000.00000.0000.10000.10000.0
A
05.328.46;05.32;1.702.16;1.702.16 54321 ii
Transient Stability Analysis of Inverter-Interfaced Distributed Generators in a Microgrid System
F. Andrade, J. Cusidó, L. RomeralMotion Control & Industrial Applications Center, MCIA
Universitat Politècnica de Catalunya. CTM Centre Tecnològic
-50 -45 -40 -35 -30 -25 -20 -15 -10 -5 0-40
-30
-20
-10
0
10
20
30
40
Real
Imag
Root Locus Plot
Stability of Lyapunov
Considering only the first generator; it has been considerate variations in the angle, active power and frequency. It was negligence variation in the voltage. The second generator is an infinite bus with fixed frequency and voltage
)(4.31 122
21
ZfZZ
ZZ
)cos(47.1)sin(14047.1)( 111 ZZZf WhereWhere
-4 -3 -2 -1 0 1 2 3 4
-5
-4
-3
-2
-1
0
1
2
3
4
5
x
y
Fig 6: phase portrait in Z1 –Z2. (x=Z1 y=Z2)
0 0.2 0.4 0.6 0.8 1-200
0
200
400
600
800
1000
1200
1400
Time (s)
Act
ive
Po
we
r (W
)
Active Power DG1
0 0.2 0.4 0.6 0.8 10
500
1000
1500
2000
2500
Active Power DG2
Time (s)
Act
ive
Po
we
r (W
)
Kp incresesKp increses
0 1 2 3 446
47
48
49
50
51
52
53
Seg
Fre
q (
Hz)
Frequencies DG1 and DG2
0 1 2 3 4-7
-6
-5
-4
-3
-2
-1
0
1Angle between V1 and V2
Seg
Ra
d
Freq1Freq2
ang1
1
0
22121 )(4.31
2
1),(
Z
duufZZZZV
-3 -2 -1 0 1 2 3-1000
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Z1
f(Z1)
Simulations result
Fig 5: Function f(Z1)
1121 )(4,31),( ZZfZZV
the region of asymptotic stability is obtained as
)(),( 0121 ZVZZV
Fig 7: Active Power dispatch by each DGs when it is increase the Kp Fig 8: two large disturbances in the Microgrid.


![Inverter-Based Generation Only—An Analysis on Dynamic ......microgrid [6]. Inverter-interfaced energy resources behave completely di erent compared to synchronous generators [7],](https://img.pdfslide.us/doc/110x75/612503dbe636eb70250656b7/inverter-based-generation-onlyaan-analysis-on-dynamic-microgrid-6-inverter-interfaced.jpg)