Embed Size (px)
Citation preview
Transformations
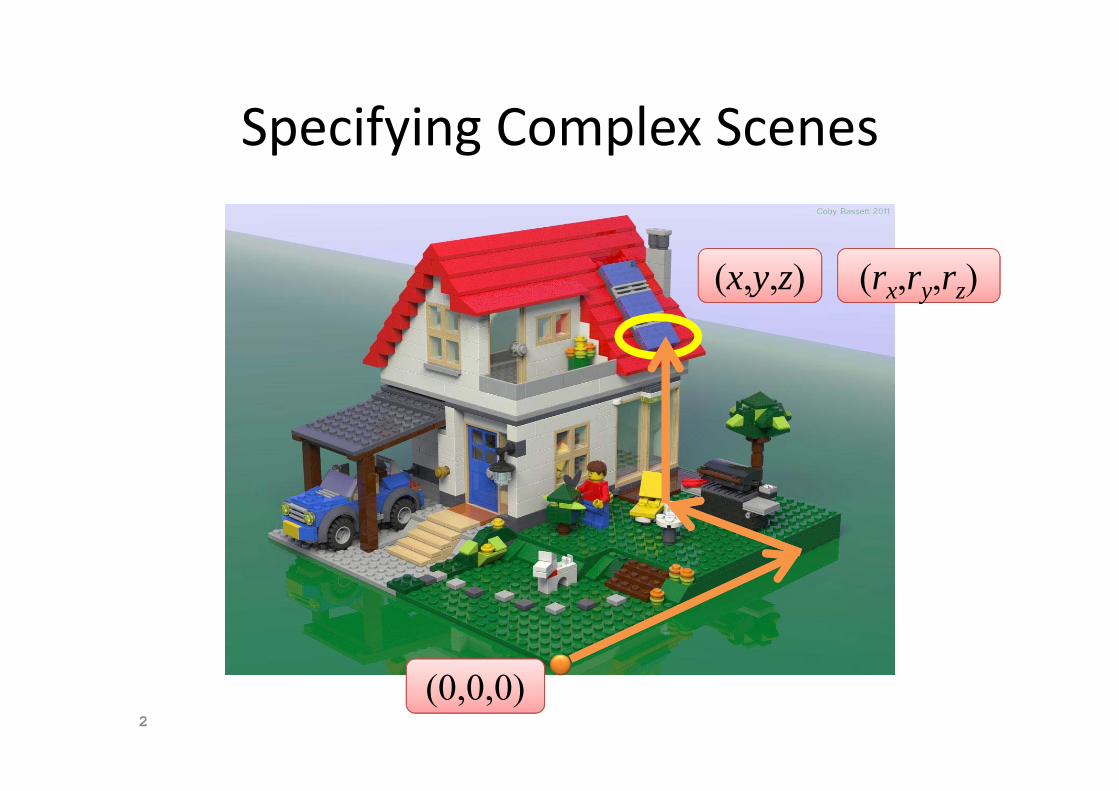
Specifying Complex Scenes
(x,y,z) y(rx,ry,rz)
(0,0,0)2
Specifying Complex Scenes
• Absolute position is not very natural
• Need a way to describe “relative” relationship:– “The lego is on top of the roof, which is above the house”
• Work “locally” for every object and then combine
3
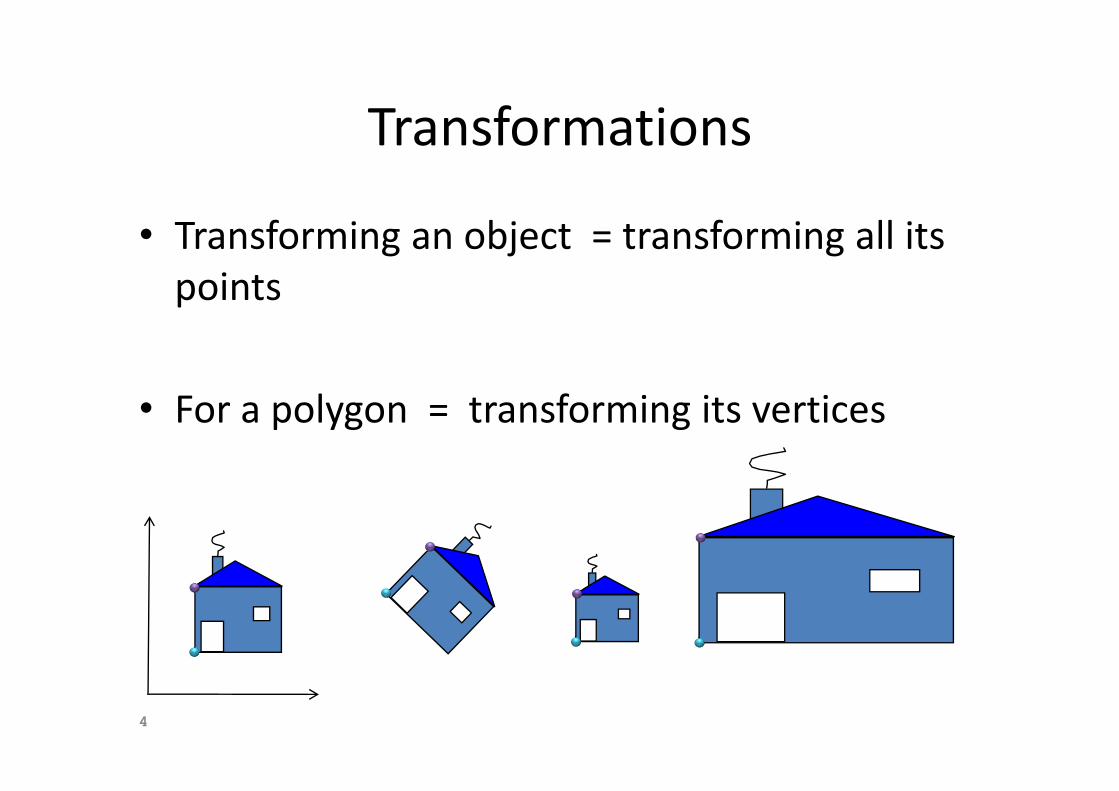
Transformations
• Transforming an object = transforming all its points
• For a polygon = transforming its vertices
4
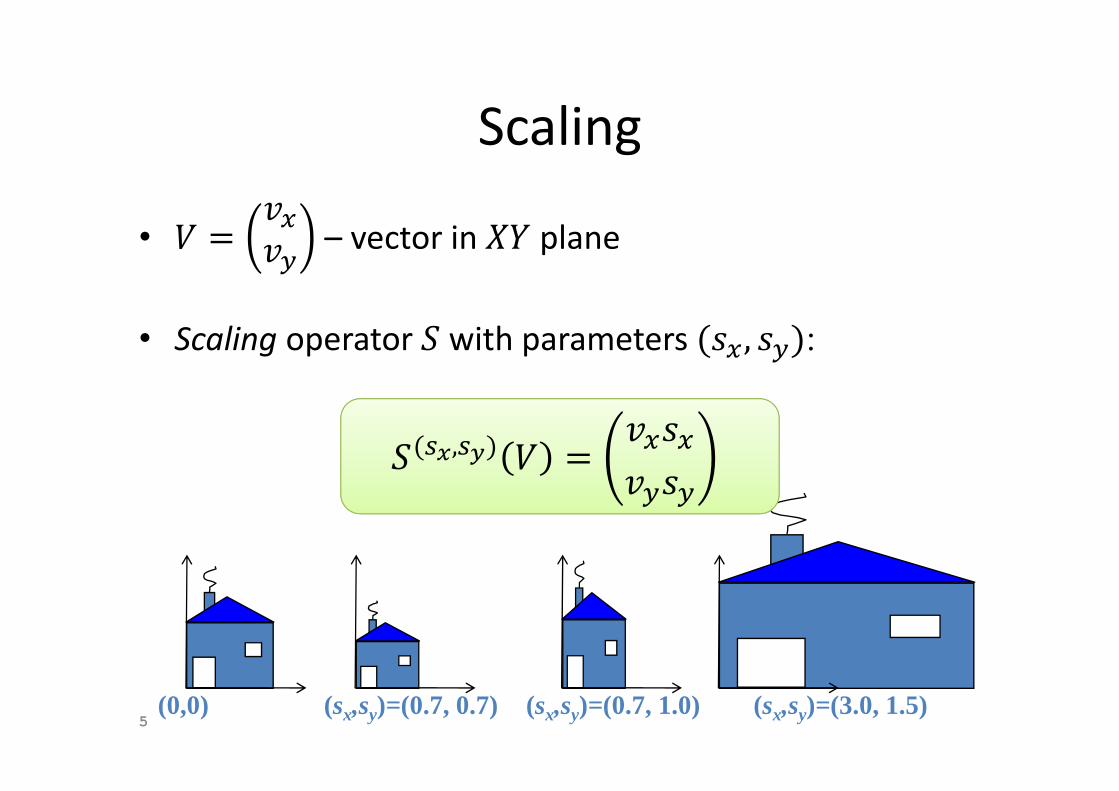
Scaling
• – vector in plane
• Scaling operator with parameters :
(0,0) (sx,sy)=(0.7, 0.7) (sx,sy)=(0.7, 1.0) (sx,sy)=(3.0, 1.5)
,,
5
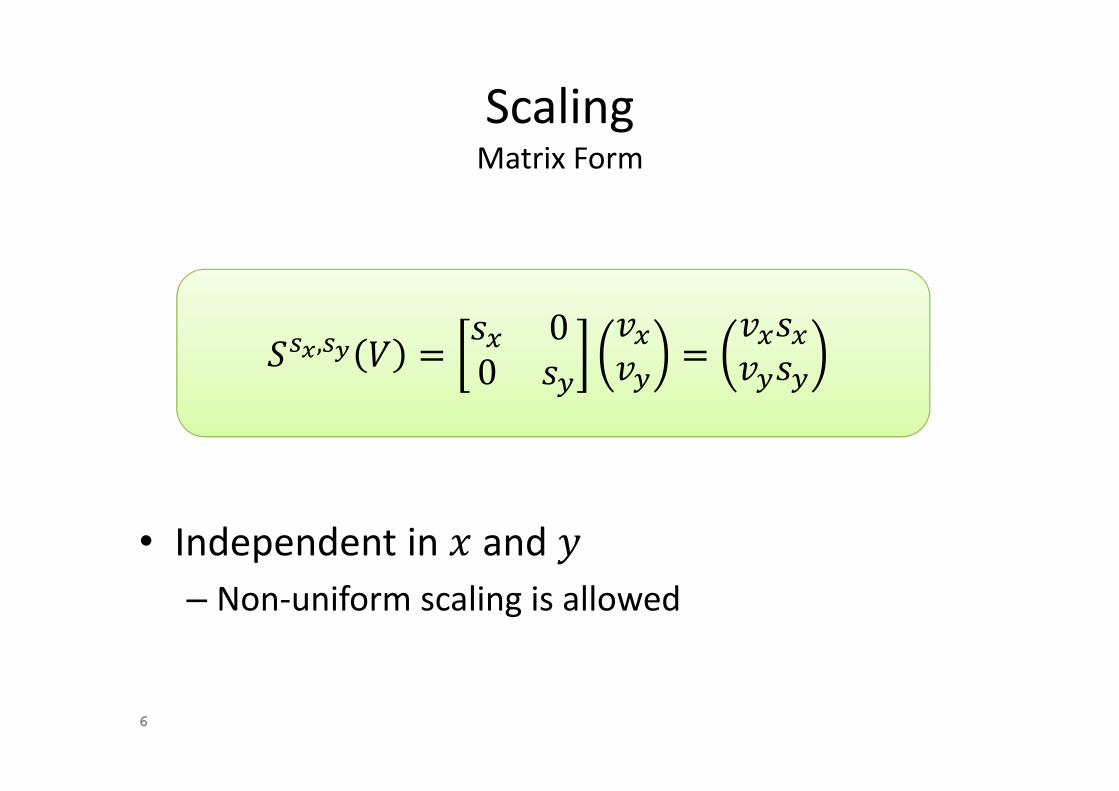
ScalingMatrix Form
• Independent in and – Non‐uniform scaling is allowed
,
6
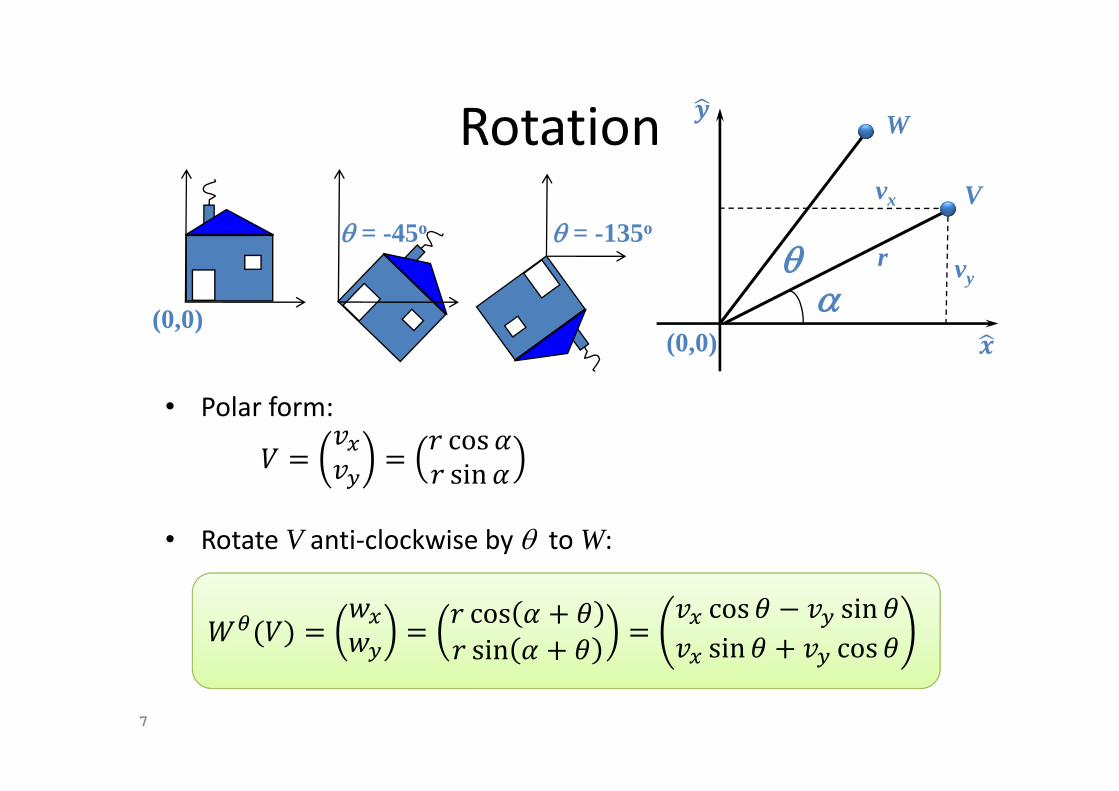
Rotation
• Polar form:cossin
• Rotate V anti‐clockwise by to W:
cossin
cos sinsin cos
(0,0)
W
V
r
(0,0)
vy
vx
= -45o = -135o
7
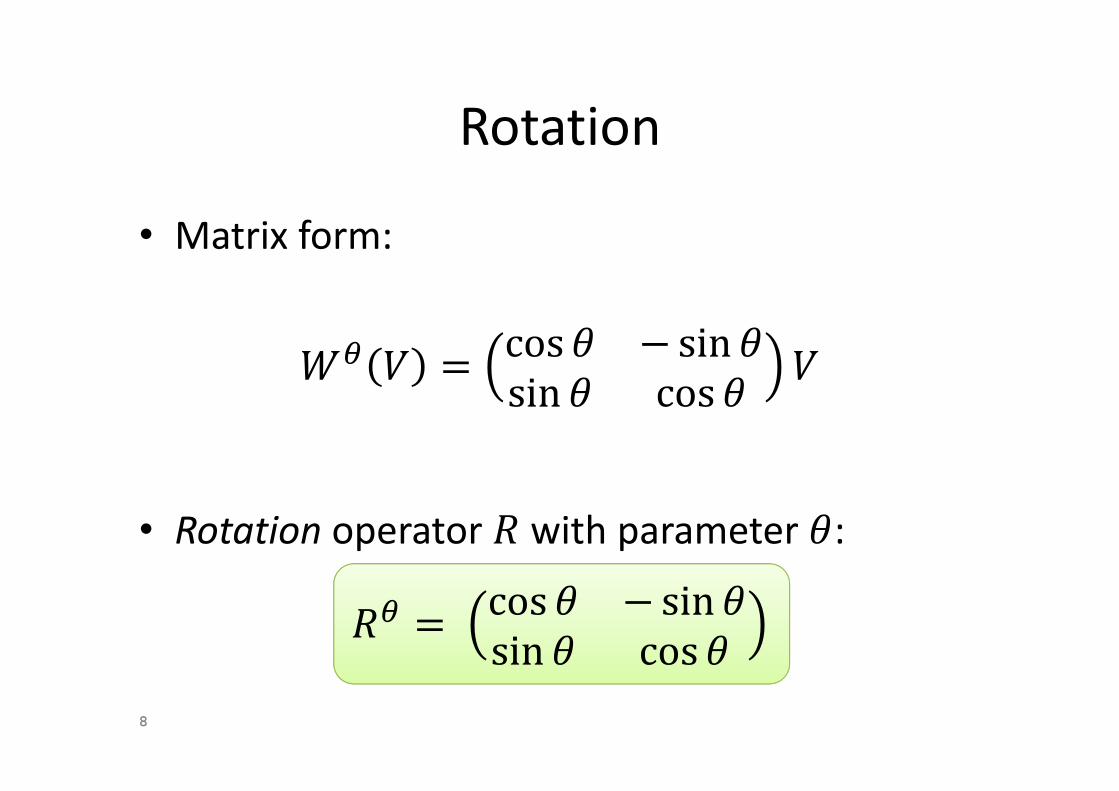
Rotation
• Matrix form:
• Rotation operator with parameter :
8
Rotation Properties
• is orthogonal
• Rotation by is
cos sinsin cos
9
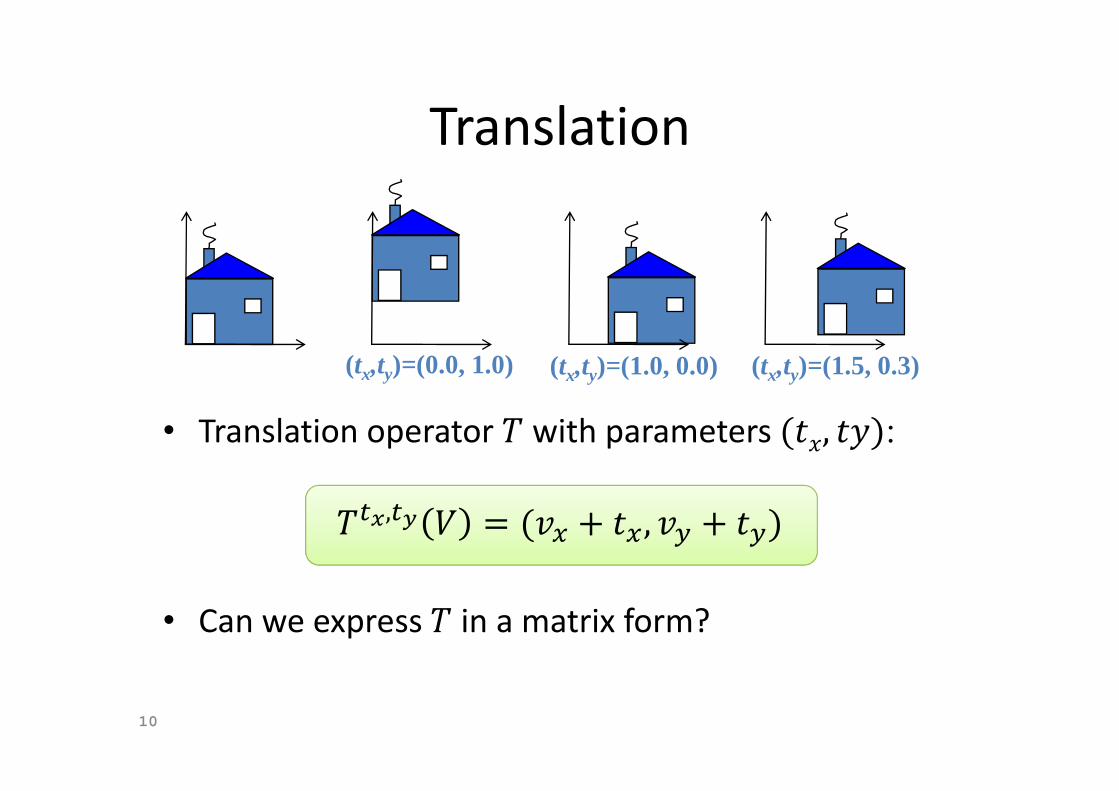
Translation
• Translation operator with parameters :
,
• Can we express in a matrix form?
(tx,ty)=(0.0, 1.0) (tx,ty)=(1.0, 0.0) (tx,ty)=(1.5, 0.3)
10
Homogeneous Coordinates in
• Points of the form
• Where we identify
• For all nonzero
11
Conversion Formulae
• From Euclidean to homogeneous
• From homogeneous to Euclidean
12
Example
• In homogeneous coordinates
13
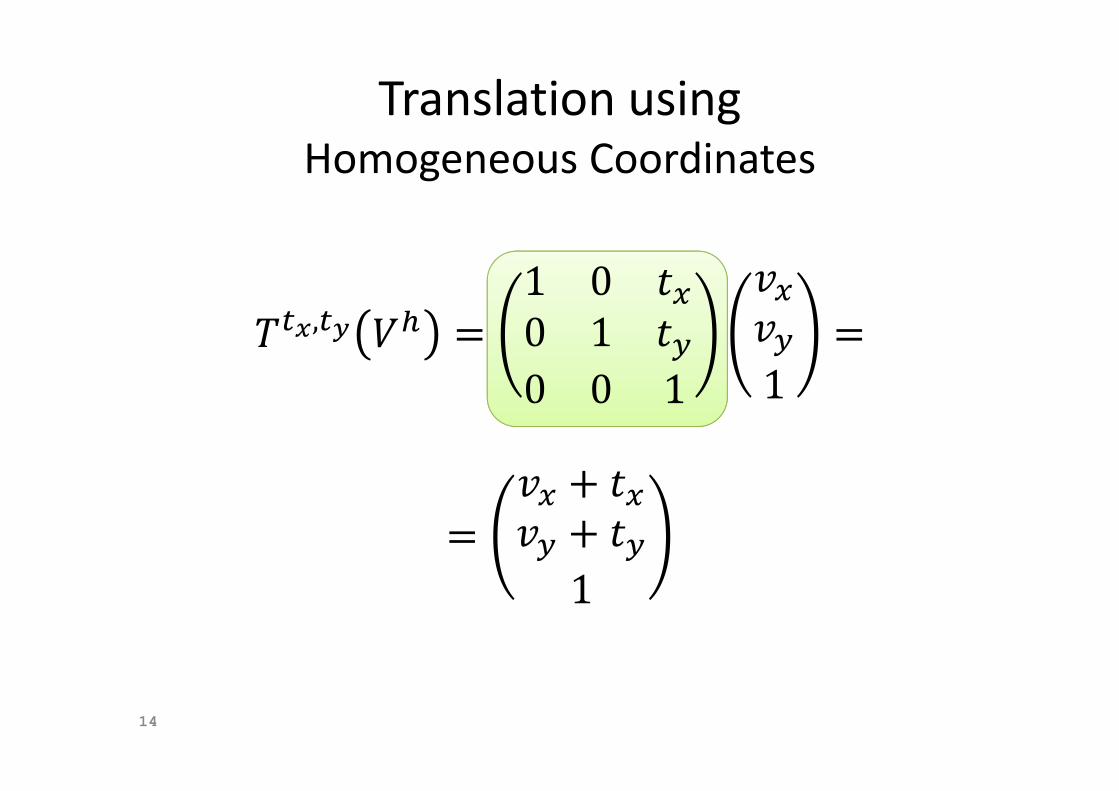
Translation usingHomogeneous Coordinates
,
14
Matrix Form
Why bother writing transformations in matrix form?
15
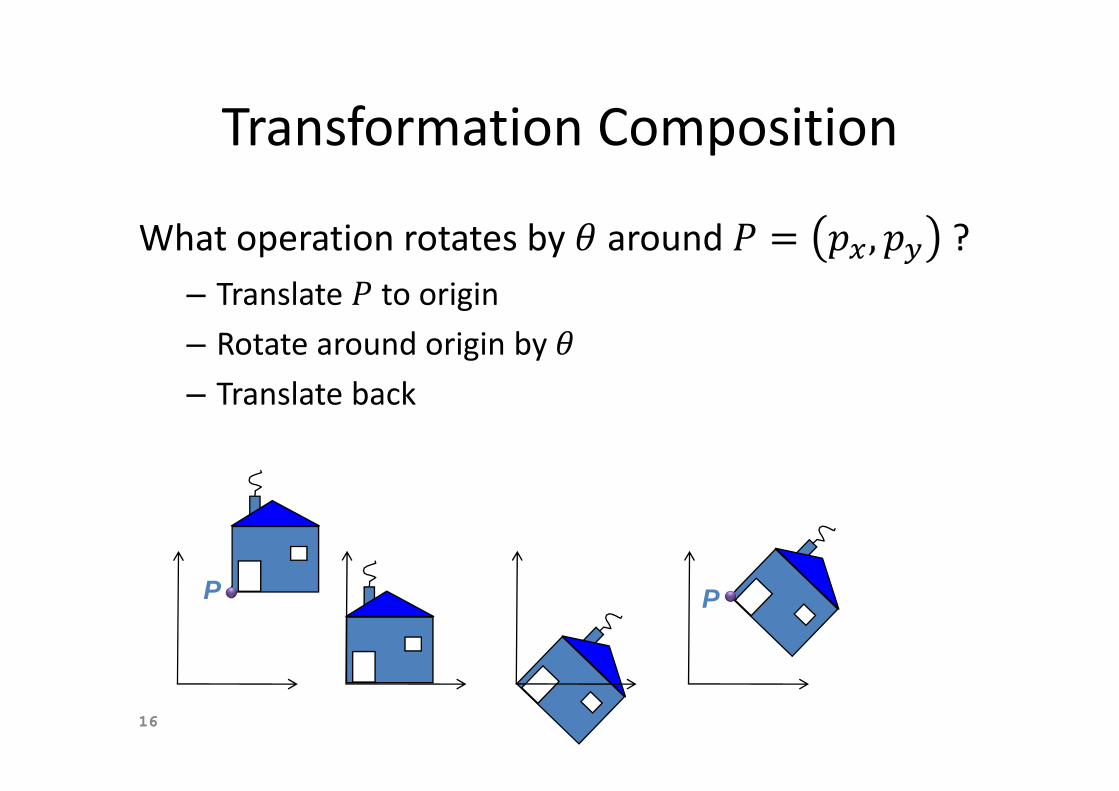
Transformation Composition
What operation rotates by around ?– Translate to origin– Rotate around origin by – Translate back
16
P P
16
Transformation Composition
• performs one transformation• performs a second transformation
• performs the composed transformation
17
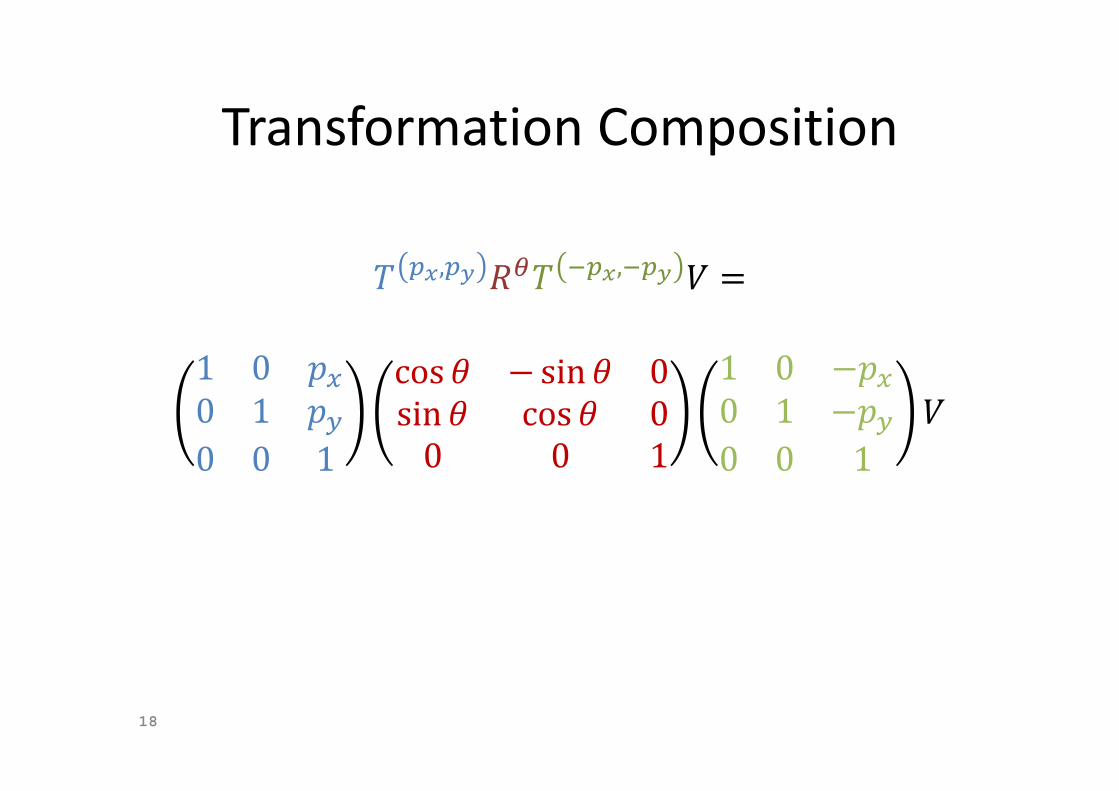
Transformation Composition
, ,
18
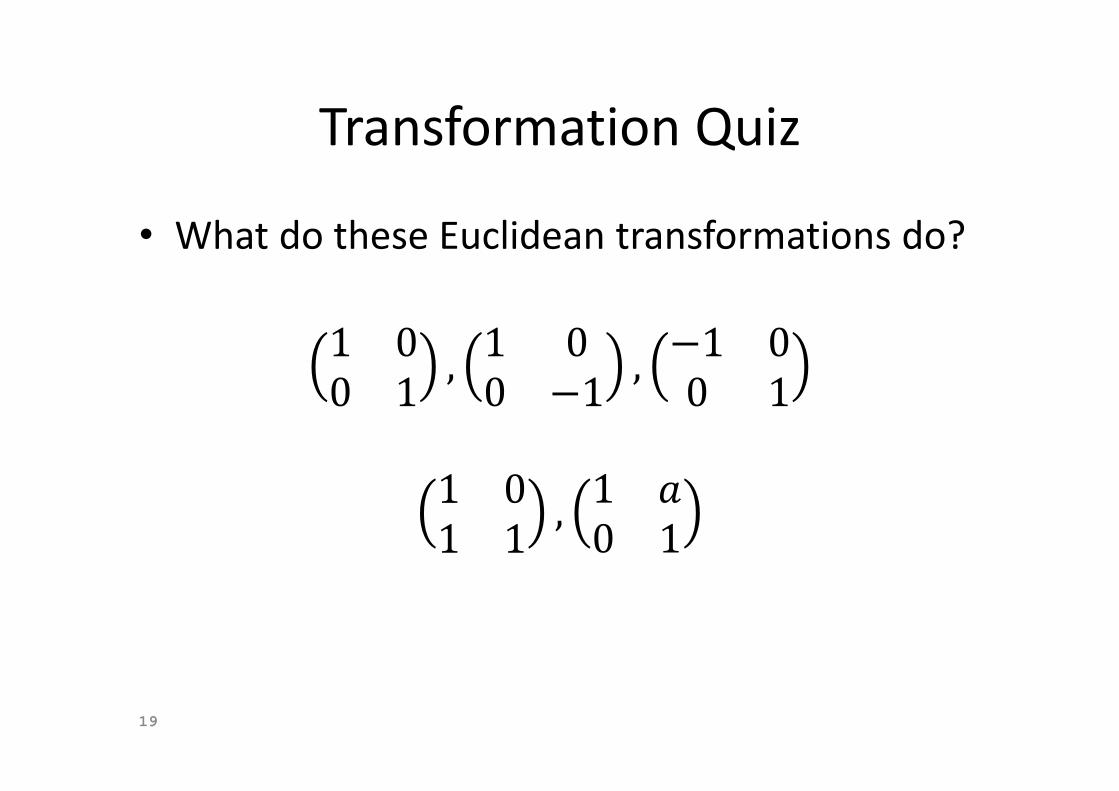
Transformation Quiz
• What do these Euclidean transformations do?
19
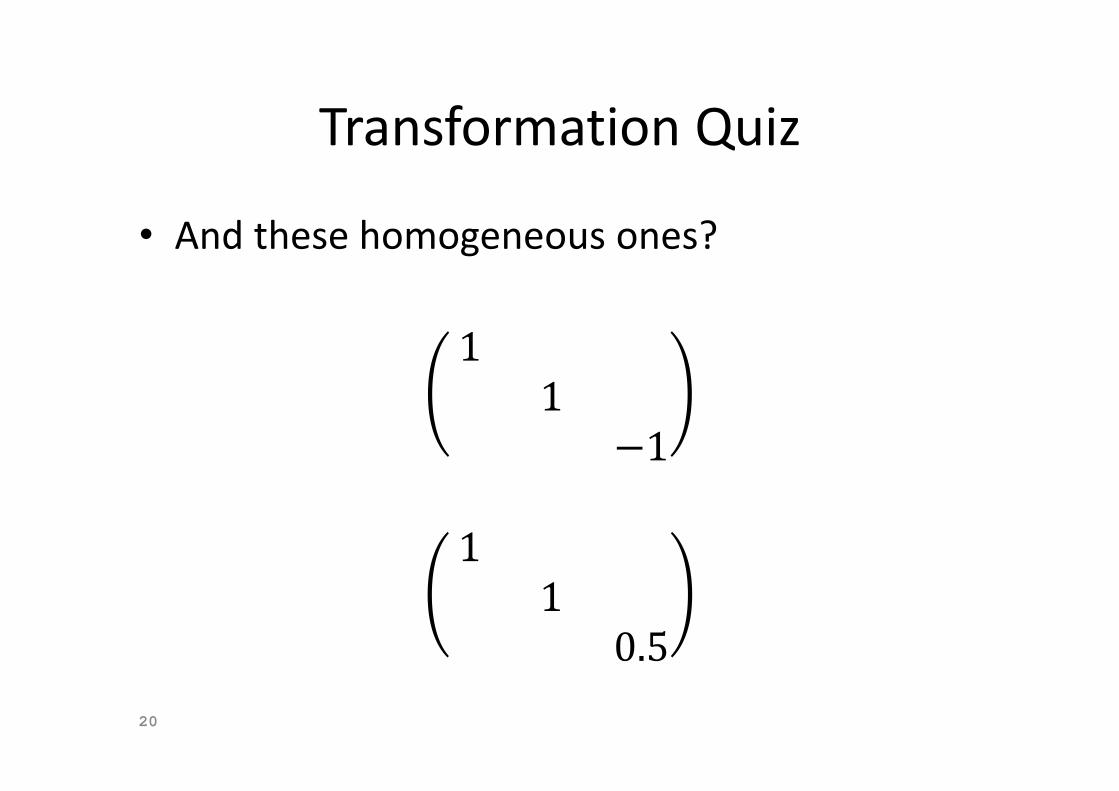
Transformation Quiz
• And these homogeneous ones?
20
Transformation Quiz
• Can one rotate in the plane by reflection?
• How can one reflect through an arbitrary line in the plane?
21
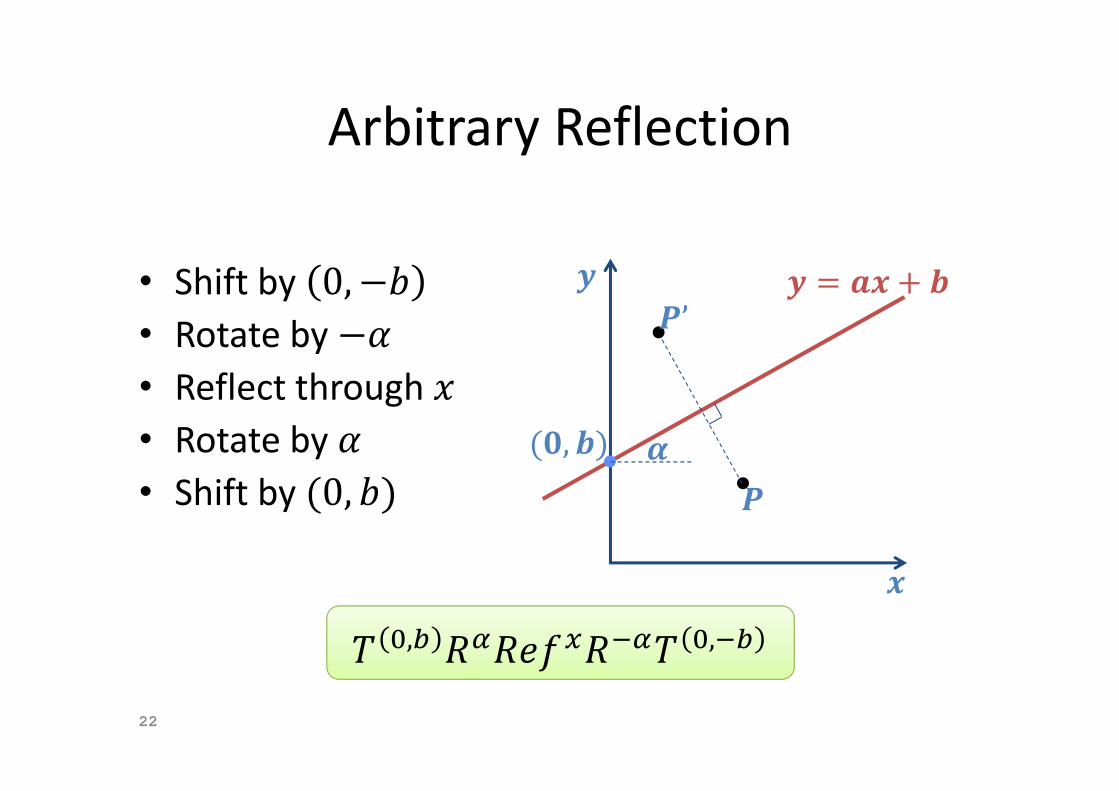
Arbitrary Reflection
• Shift by • Rotate by • Reflect through • Rotate by • Shift by
, ,
22
’
,
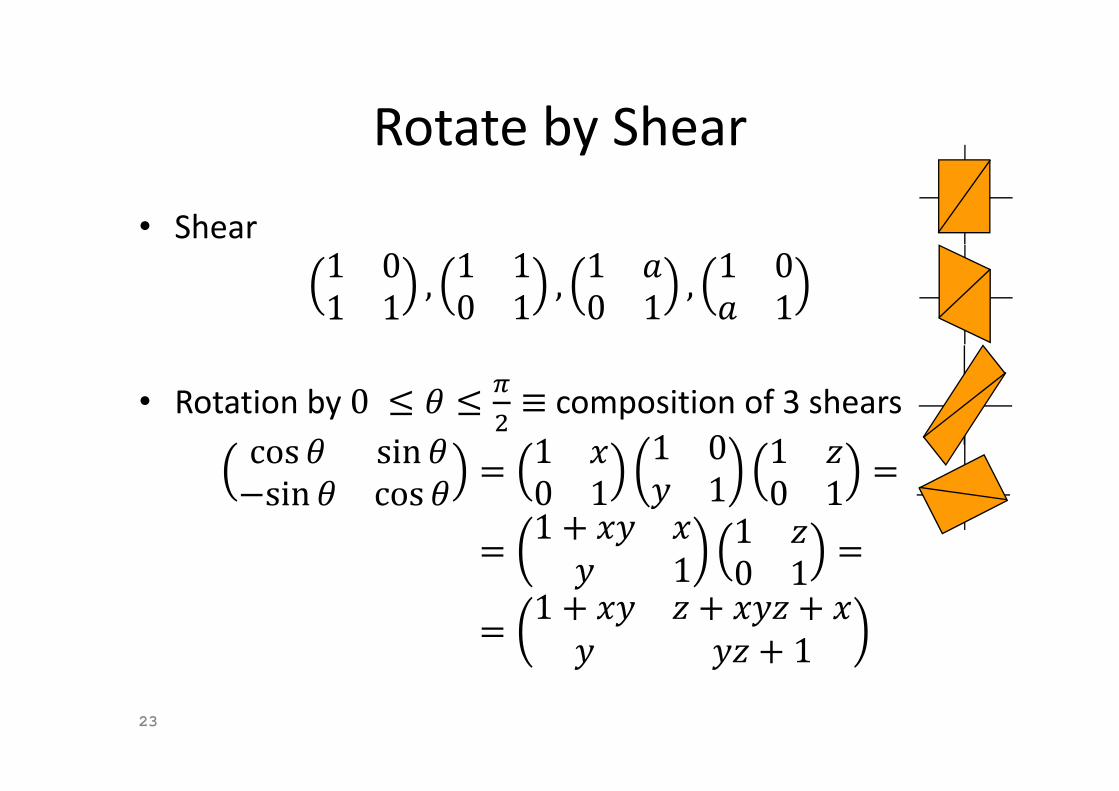
Rotate by Shear
• Shear
• Rotation by composition of 3 shears
23
Rotate by Shear
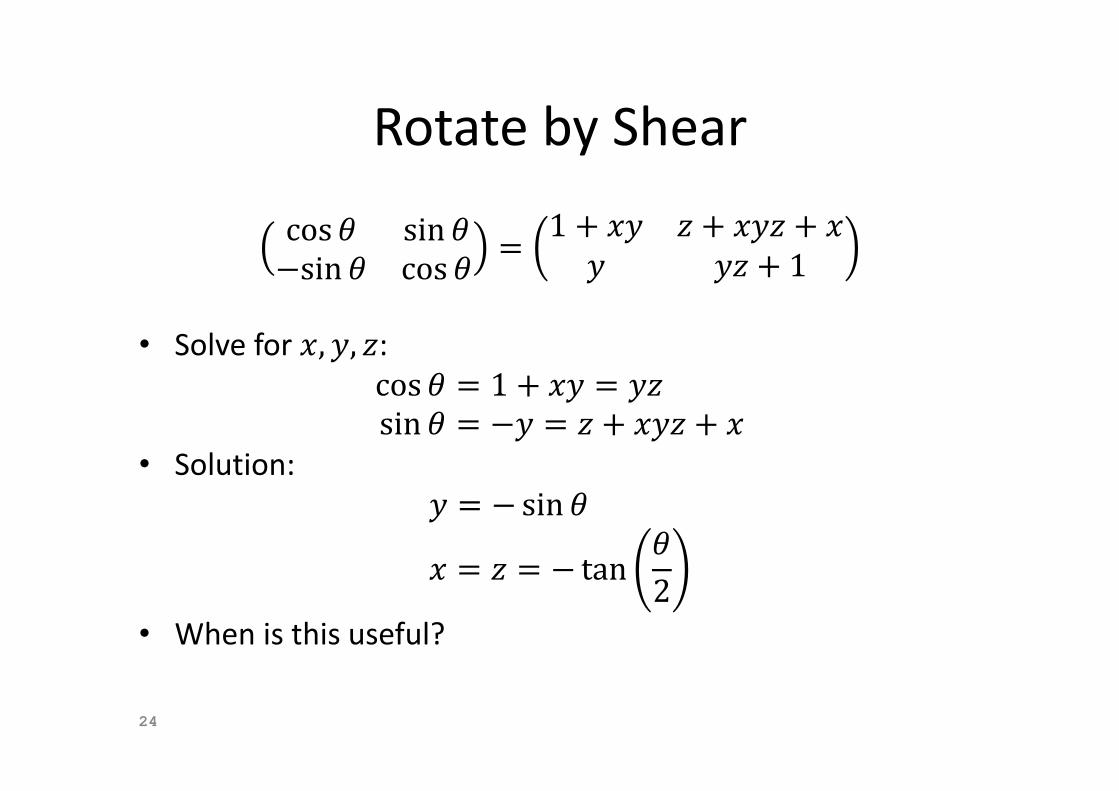
cos sinsin cos
11
• Solve for , , :cos 1sin
• Solution:sin
tan 2• When is this useful?
24
Rotate by Shear
• Can we rotate with two (scaled) shears?
• What happens for ?
25
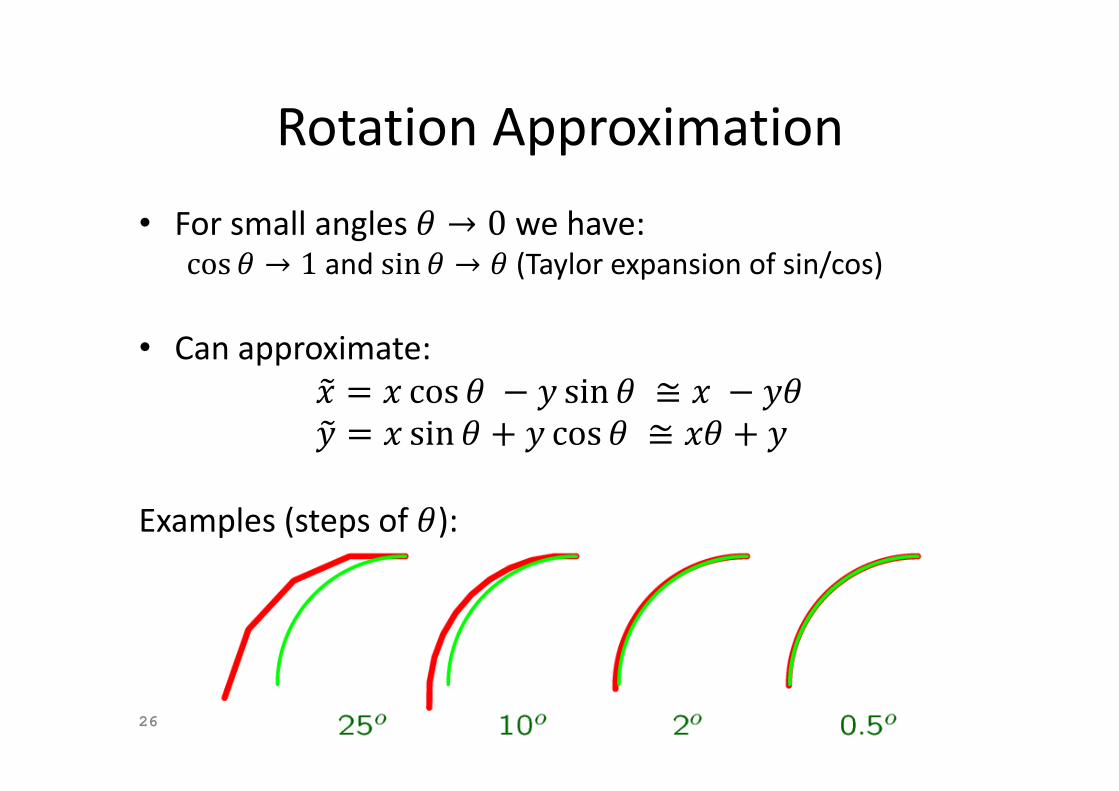
Rotation Approximation• For small angles we have:
cos → 1 and sin → (Taylor expansion of sin/cos)
• Can approximate:
Examples (steps of ):
26
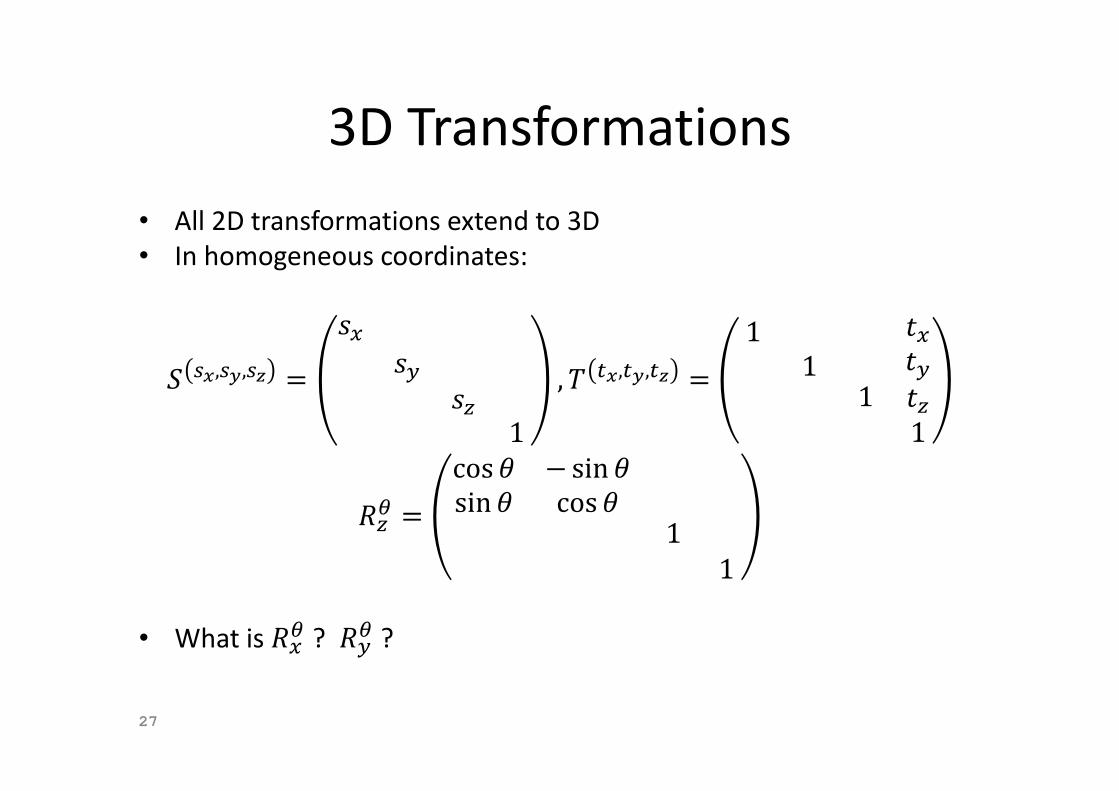
3D Transformations• All 2D transformations extend to 3D• In homogeneous coordinates:
, ,
1
, , ,1
11
1cos sinsin cos
1
1
• What is ? ?
27
3D Transformations
• Questions (commutativity):
– Scaling: Is S1S2 = S2S1?
– Translation: Is T1T2 = T2T1?
– Rotation: Is R1R2 = R2R1?
28
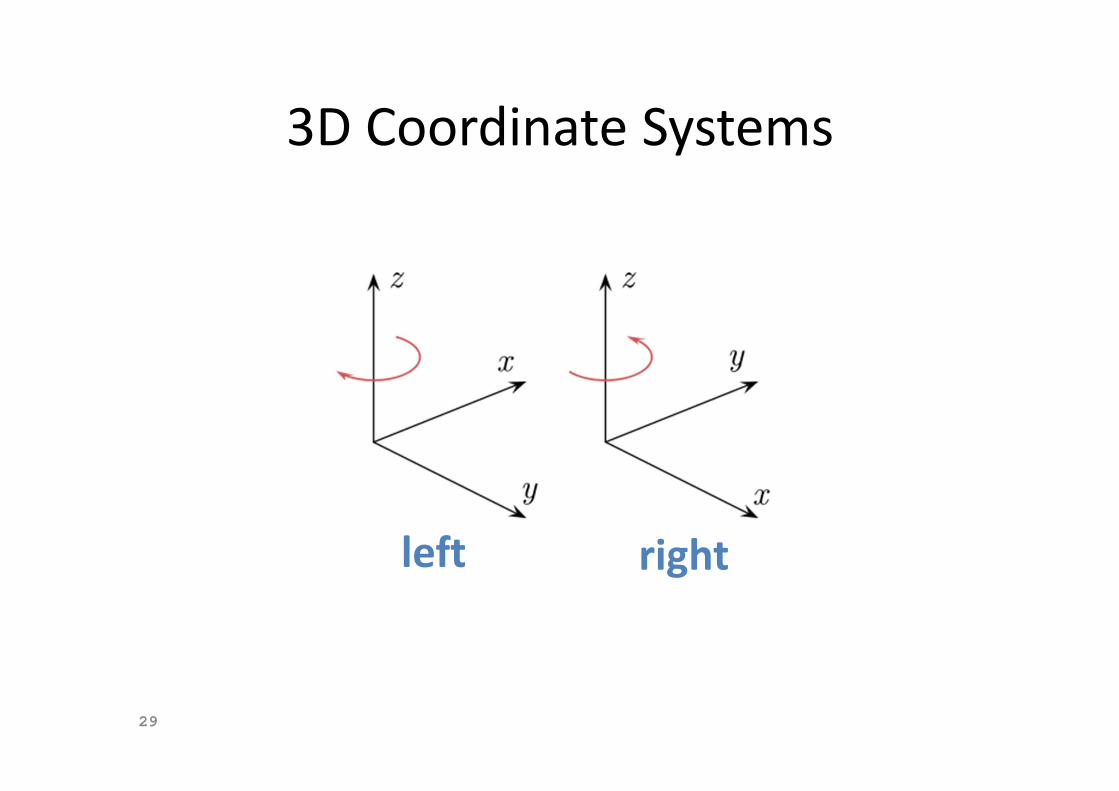
3D Coordinate Systems
29
left right
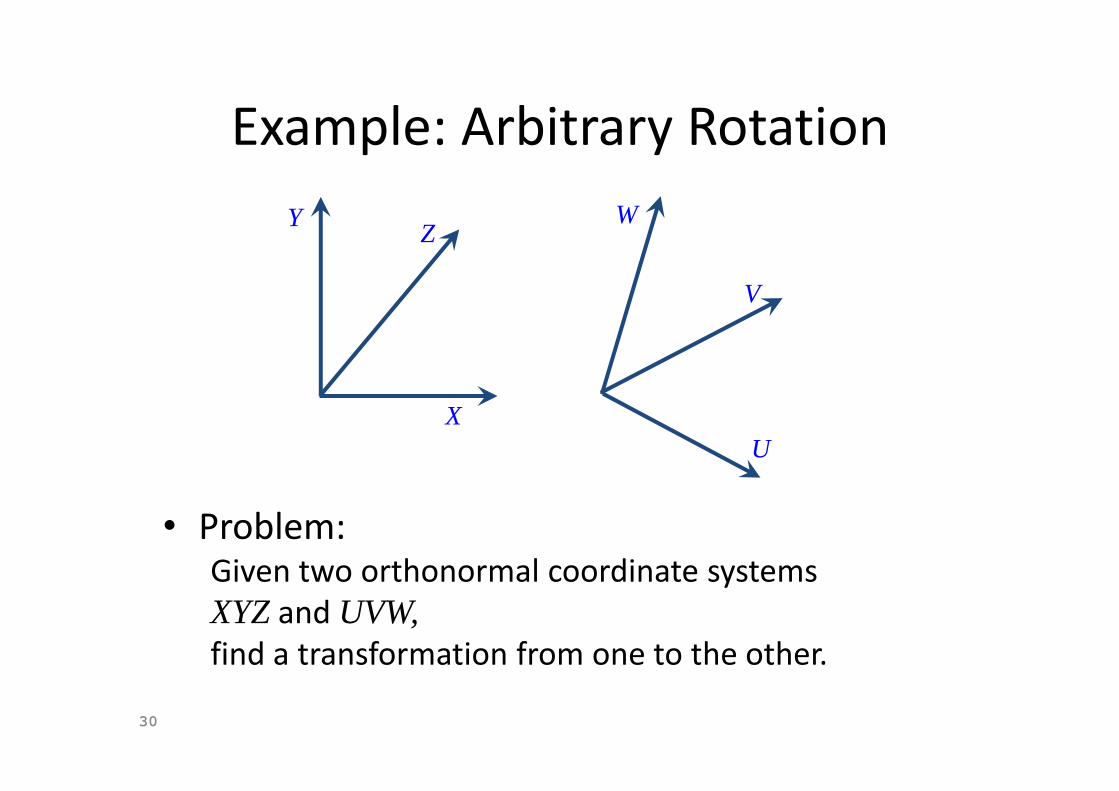
Example: Arbitrary Rotation
• Problem: Given two orthonormal coordinate systems XYZ and UVW,find a transformation from one to the other.
Y Z
X
W
V
U
30
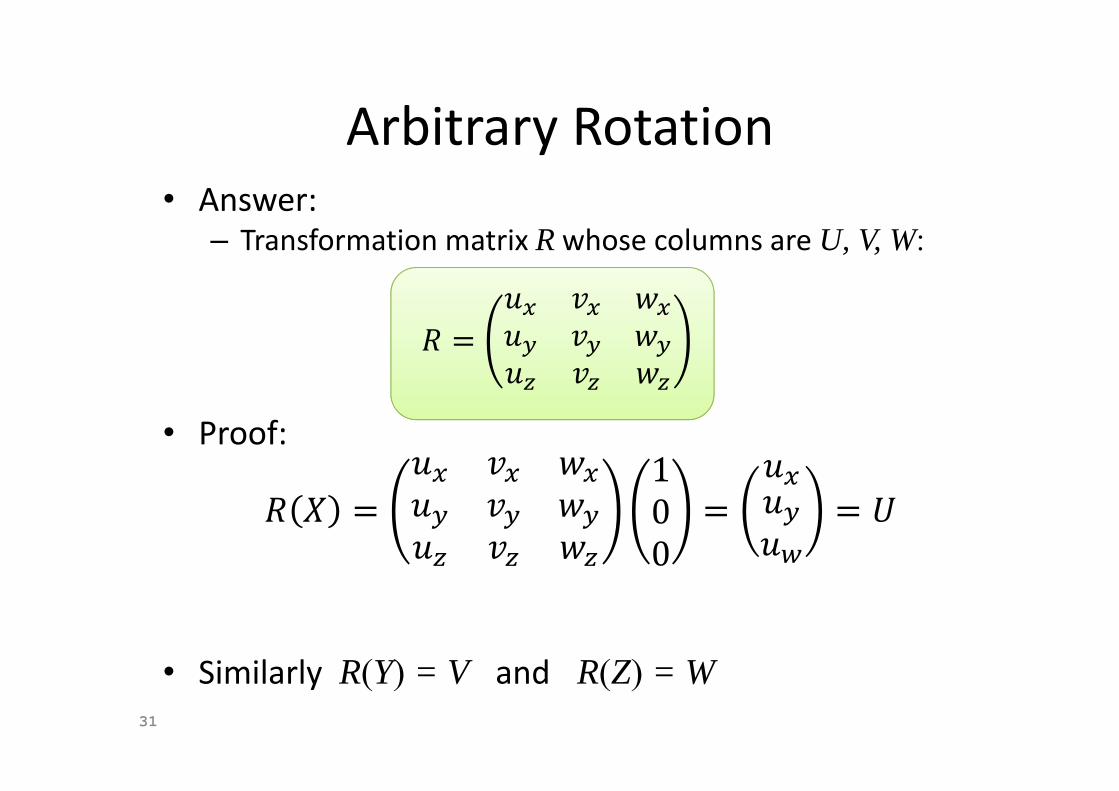
Arbitrary Rotation• Answer:
– Transformation matrix R whose columns are U, V, W:
• Proof:
• Similarly R(Y) = V and R(Z) = W31
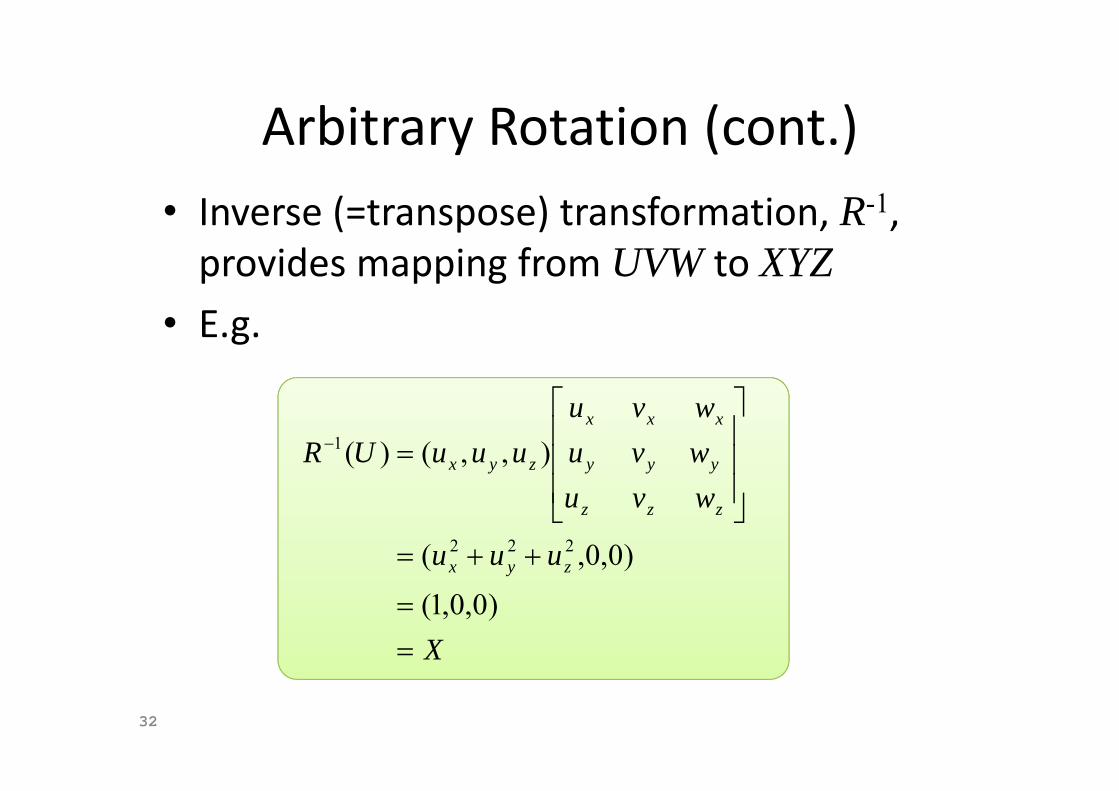
Arbitrary Rotation (cont.)• Inverse (=transpose) transformation, R-1, provides mapping from UVW to XYZ
• E.g.
X
uuu
wvuwvuwvu
uuuUR
zyx
zzz
yyy
xxx
zyx
)0,0,1(
)0,0,(
),,()(
222
1
32
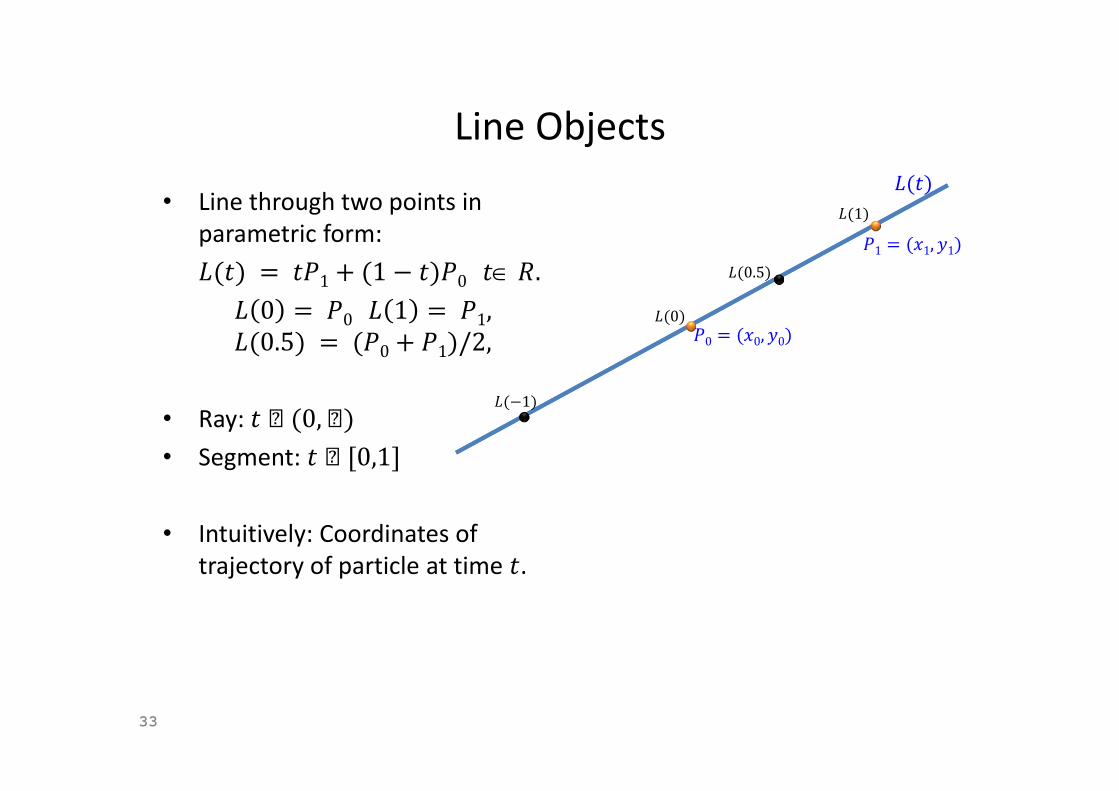
Line Objects
• Line through two points in parametric form:
1 1 0 .
0 01 1,
0.5 0 1 /2,
• Ray: 0,• Segment: 0,1
• Intuitively: Coordinates of trajectory of particle at time .
0 0, 0
1 1, 1
0.5
0
1
1
33
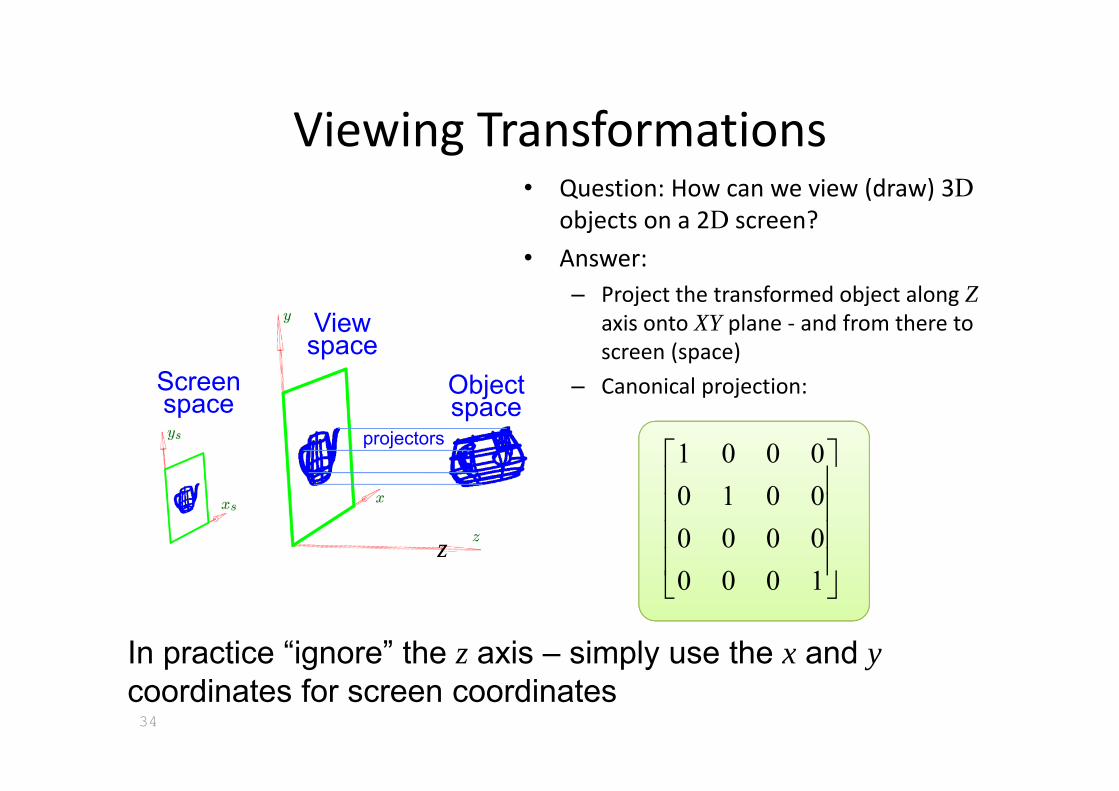
Viewing Transformations• Question: How can we view (draw) 3D
objects on a 2D screen?• Answer:
– Project the transformed object along Zaxis onto XY plane ‐ and from there to screen (space)
– Canonical projection:
1000000000100001
In practice “ignore” the z axis – simply use the x and ycoordinates for screen coordinates
z
Objectspace
Viewspace
Screenspace
projectors
34
Parallel Projection
35
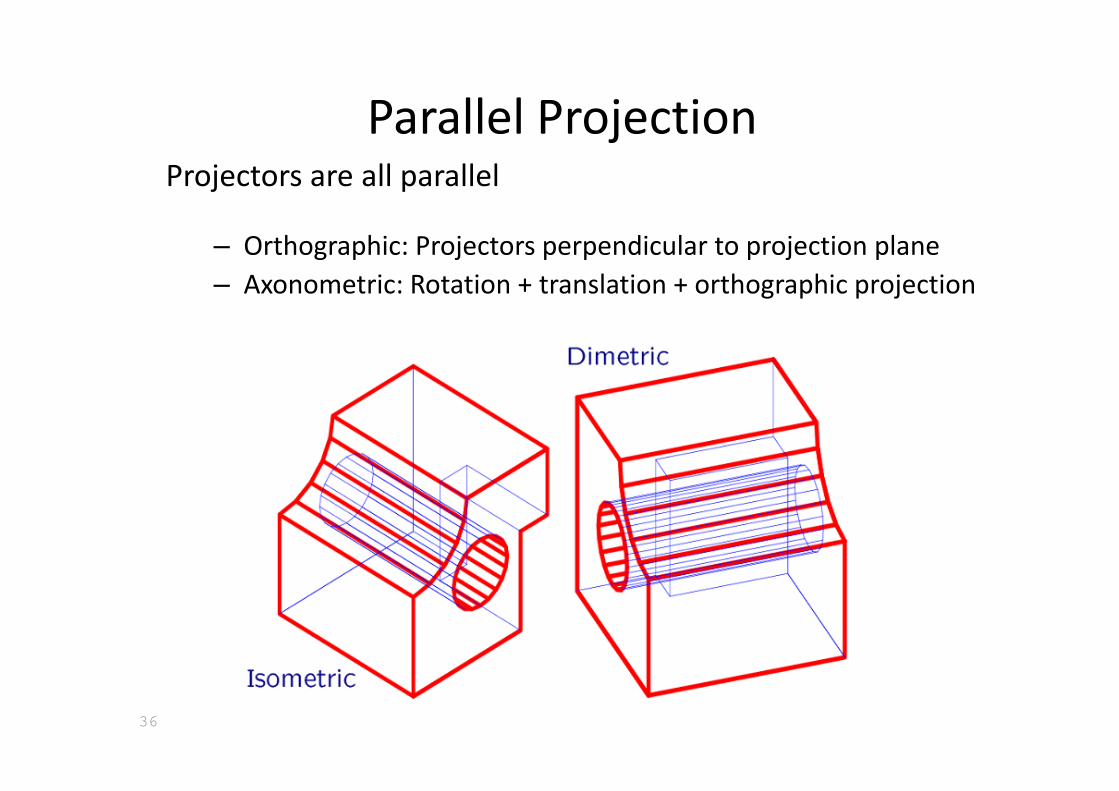
Parallel ProjectionProjectors are all parallel
– Orthographic: Projectors perpendicular to projection plane– Axonometric: Rotation + translation + orthographic projection
36
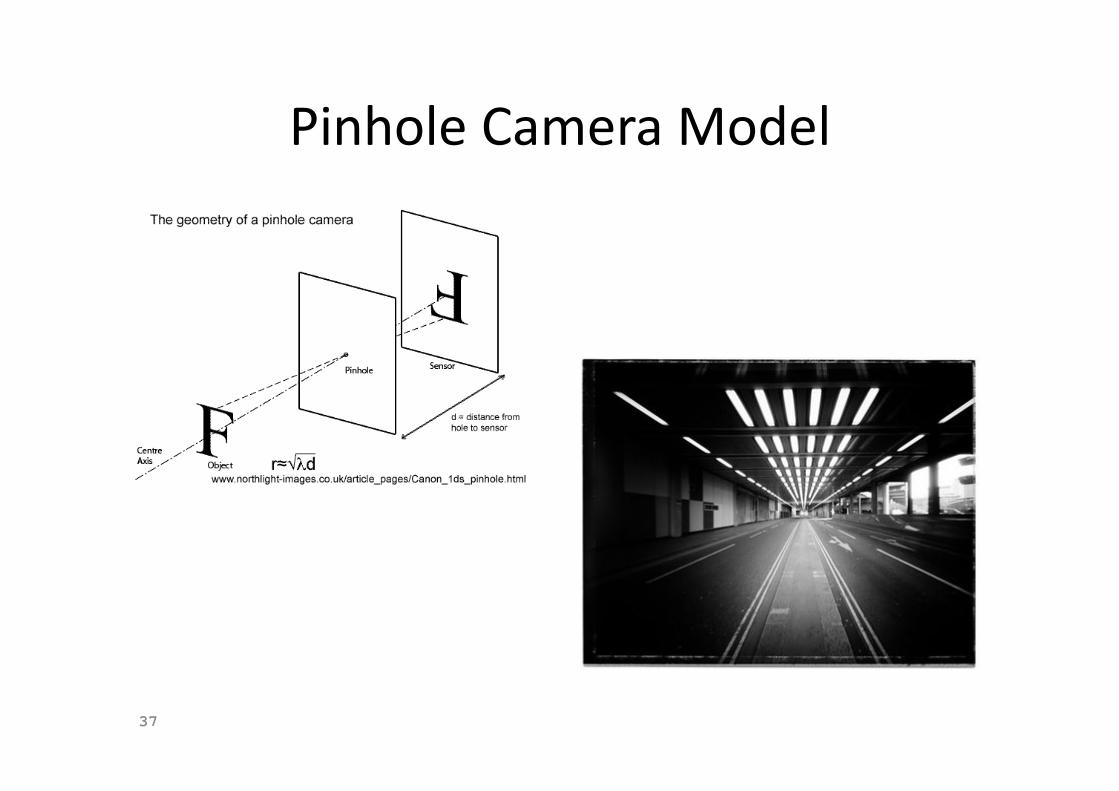
Pinhole Camera Model
37
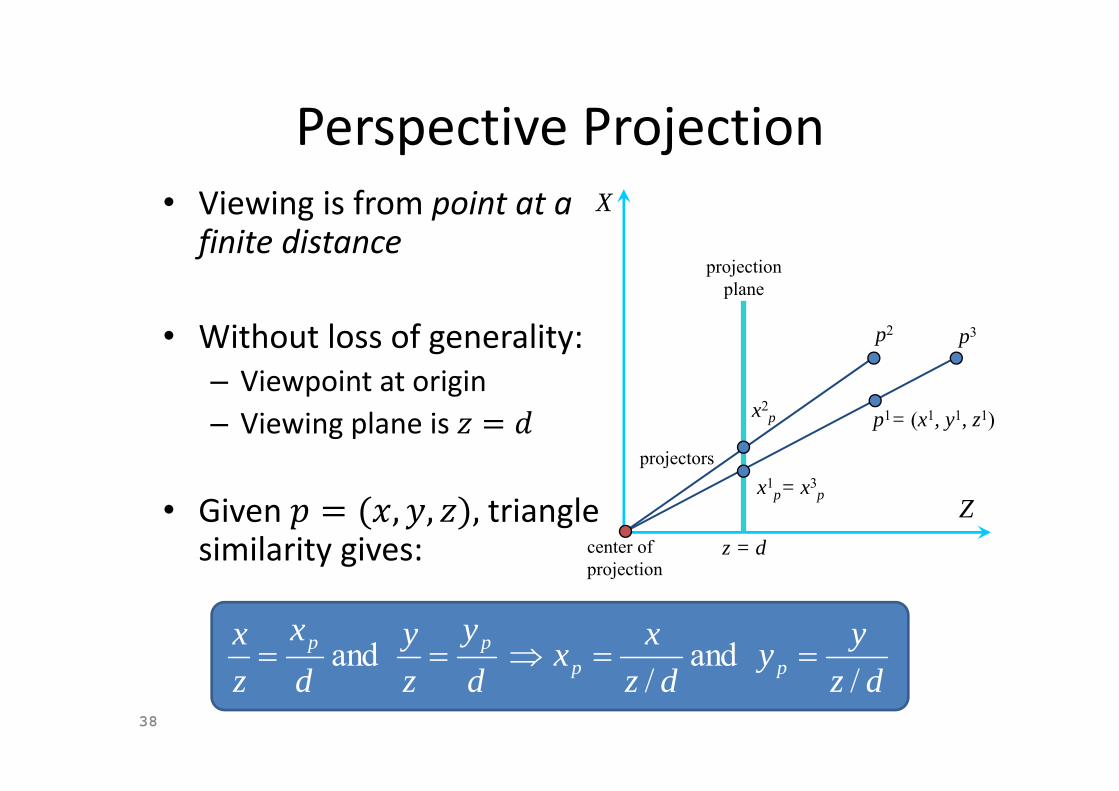
Perspective Projection• Viewing is from point at a finite distance
• Without loss of generality:– Viewpoint at origin– Viewing plane is
• Given triangle similarity gives:
dzyy
dzxx
dy
zy
dx
zx
pppp
/ and
/ and
center of projection
projectors
projectionplane
X
x2p
x1p= x3
p
z = d
p1= (x1, y1, z1)
p2 p3
Z
38
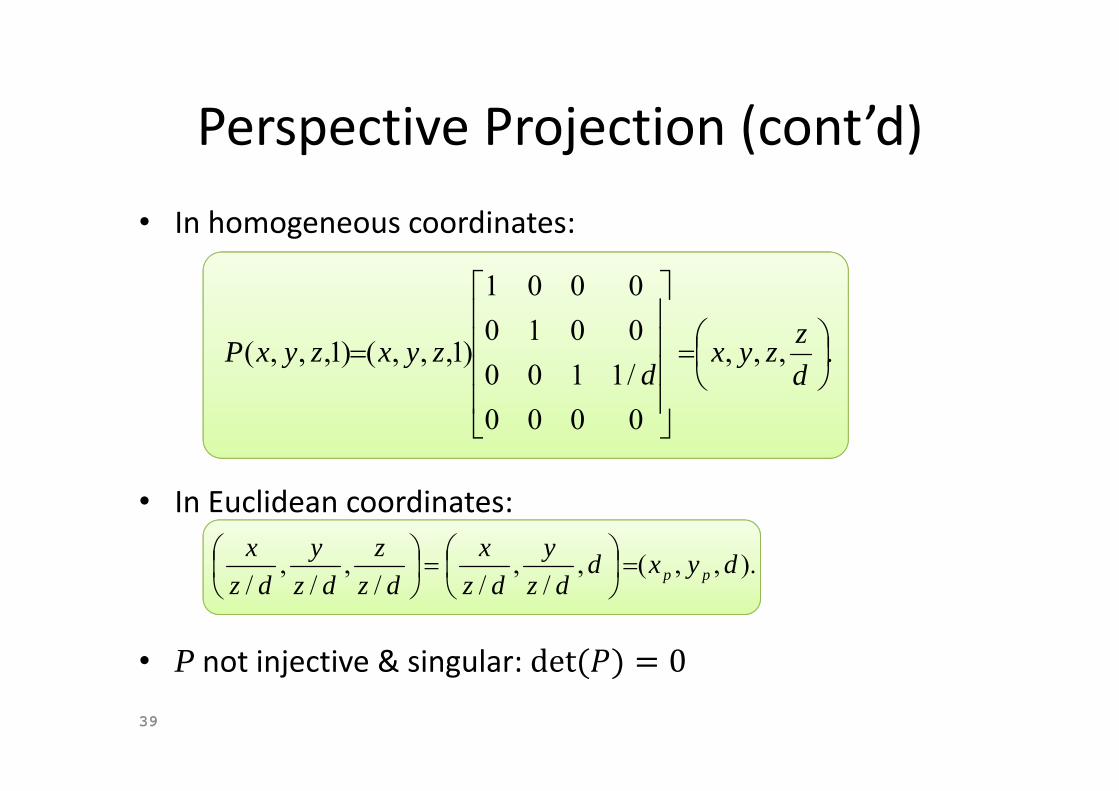
Perspective Projection (cont’d)• In homogeneous coordinates:
• In Euclidean coordinates:
• P not injective & singular: det 0
.,,,
0000/110000100001
)1,,,()1,,,(
dzzyx
dzyxzyxP
).,,(,/
,//
,/
,/
dyxddz
ydz
xdz
zdz
ydz
xpp
39
40

original
41
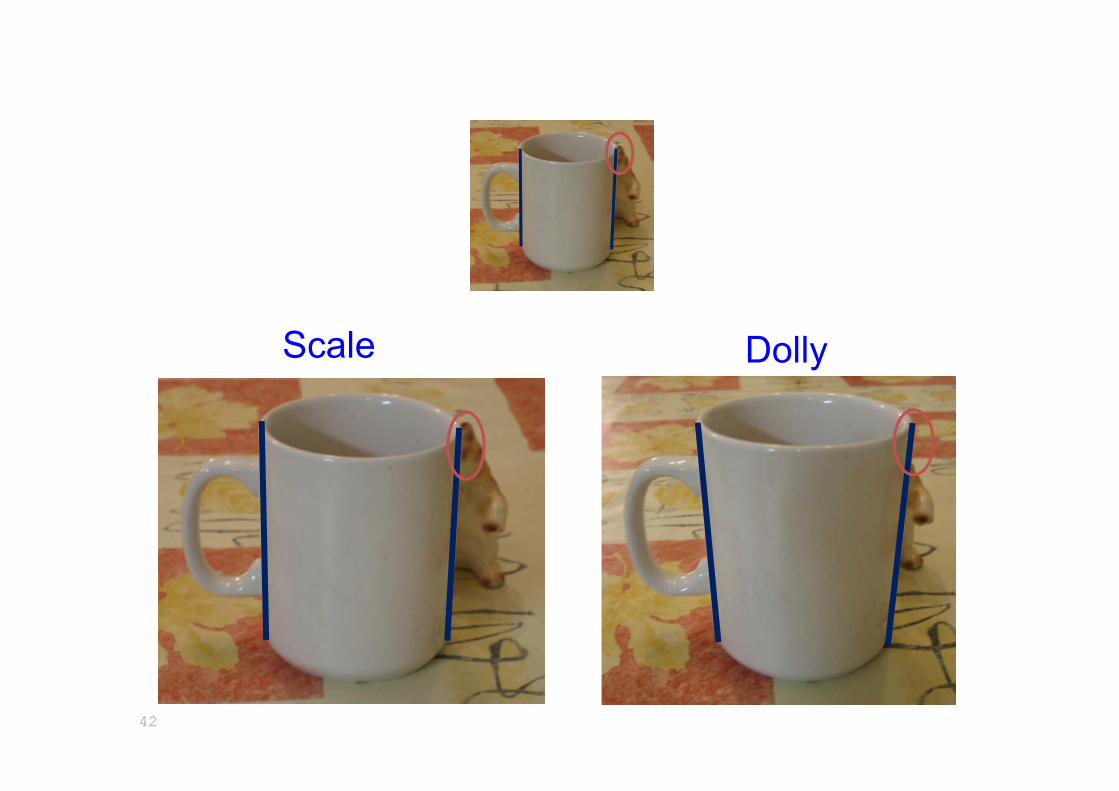
Scale Dolly
42
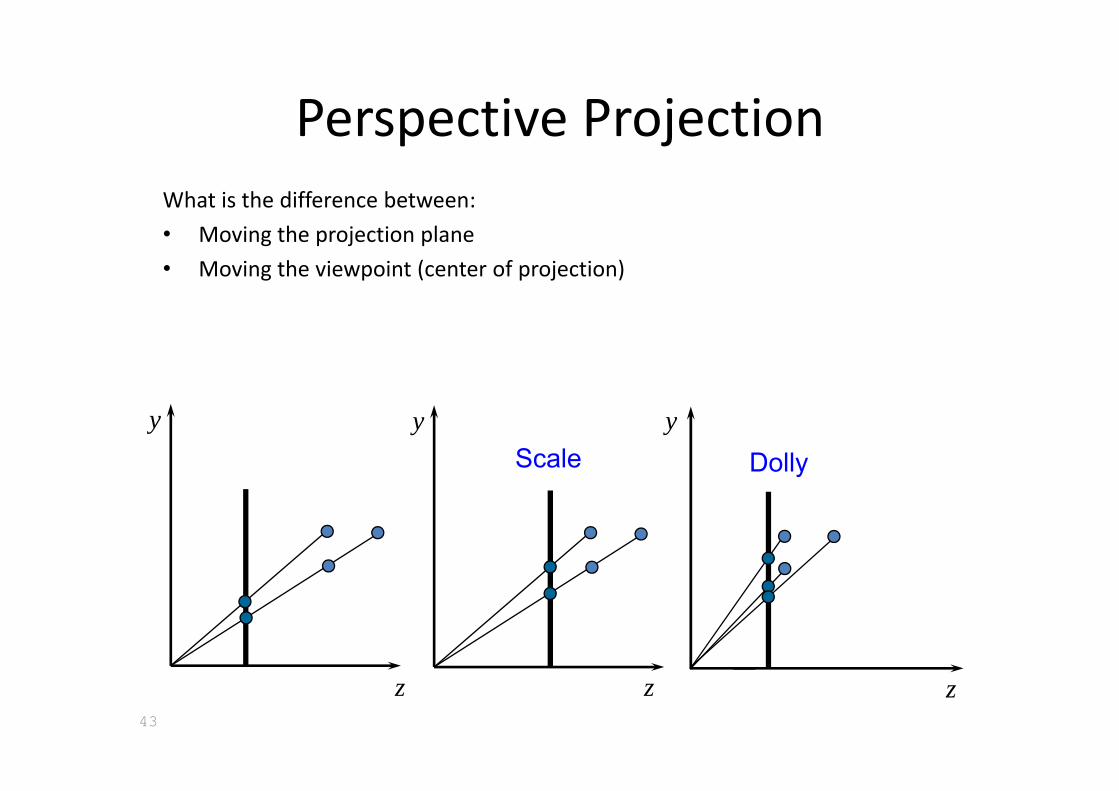
Perspective ProjectionWhat is the difference between:• Moving the projection plane• Moving the viewpoint (center of projection)
Z
Z
y yyScale Dolly
Zz z z43
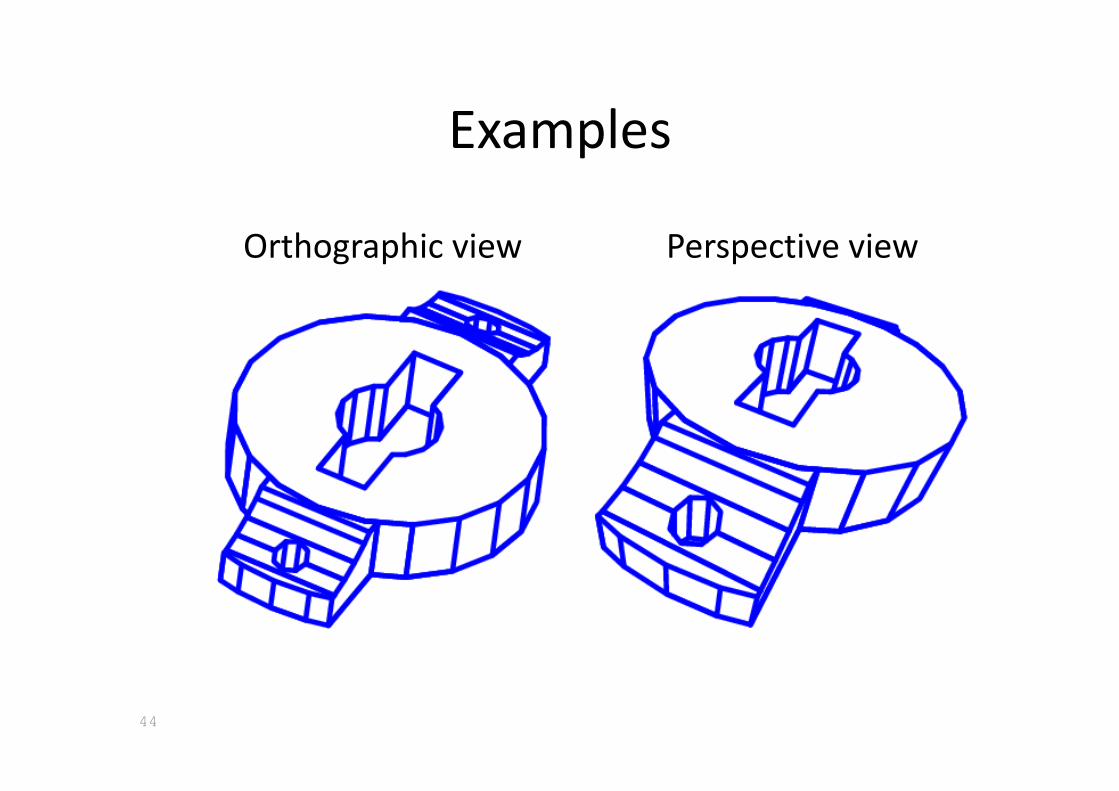
Examples
Orthographic view Perspective view
44
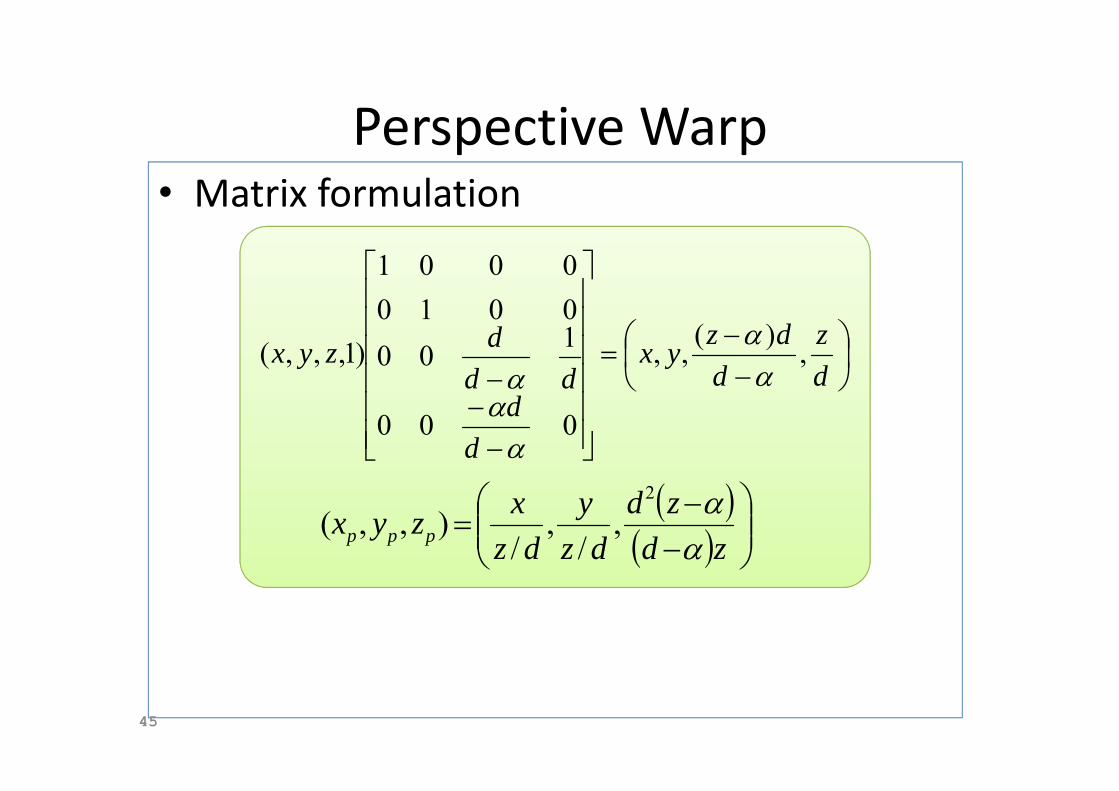
Perspective Warp• Matrix formulation
d
zd
dzyx
dd
dddzyx ,)(,,
000
10000100001
)1,,,(
zd
zddz
ydz
xzyx ppp 2
,/
,/
),,(
45
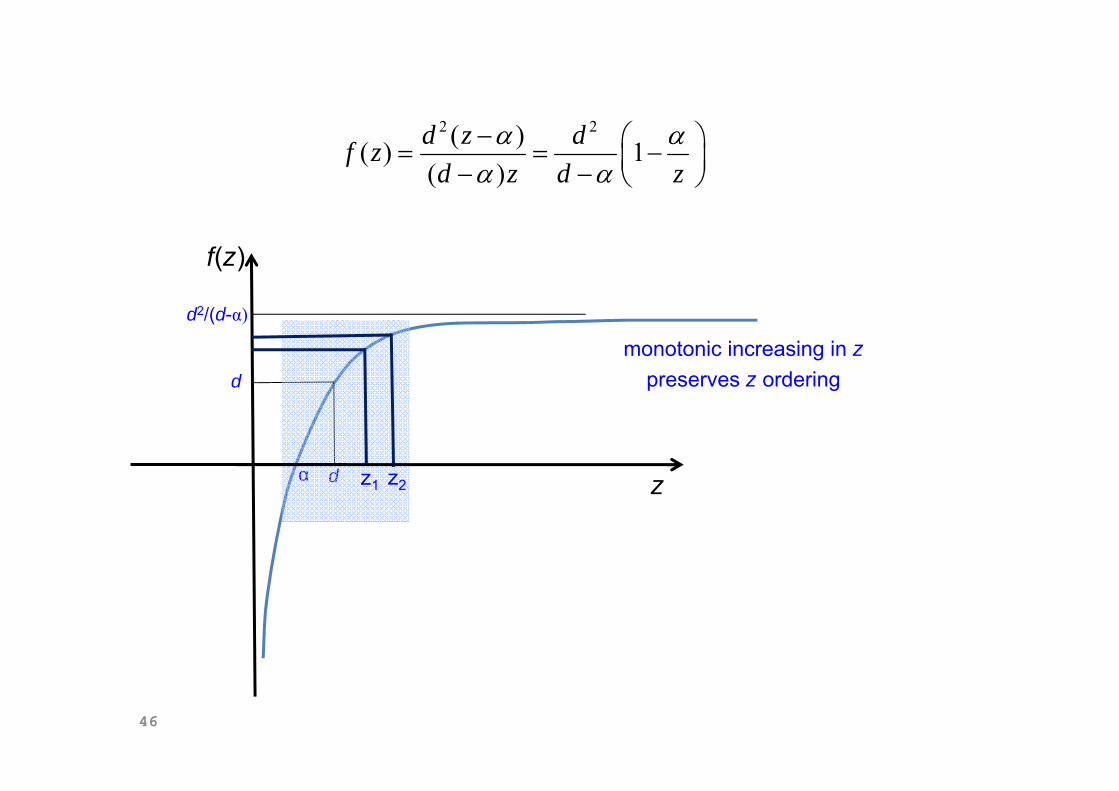
2 2( )( ) 1( )
d z df zd z d z
α
d2/(d-α)
d
d
z
f(z)
monotonic increasing in zpreserves z ordering
z1 z2
46
Perspective Warp
47
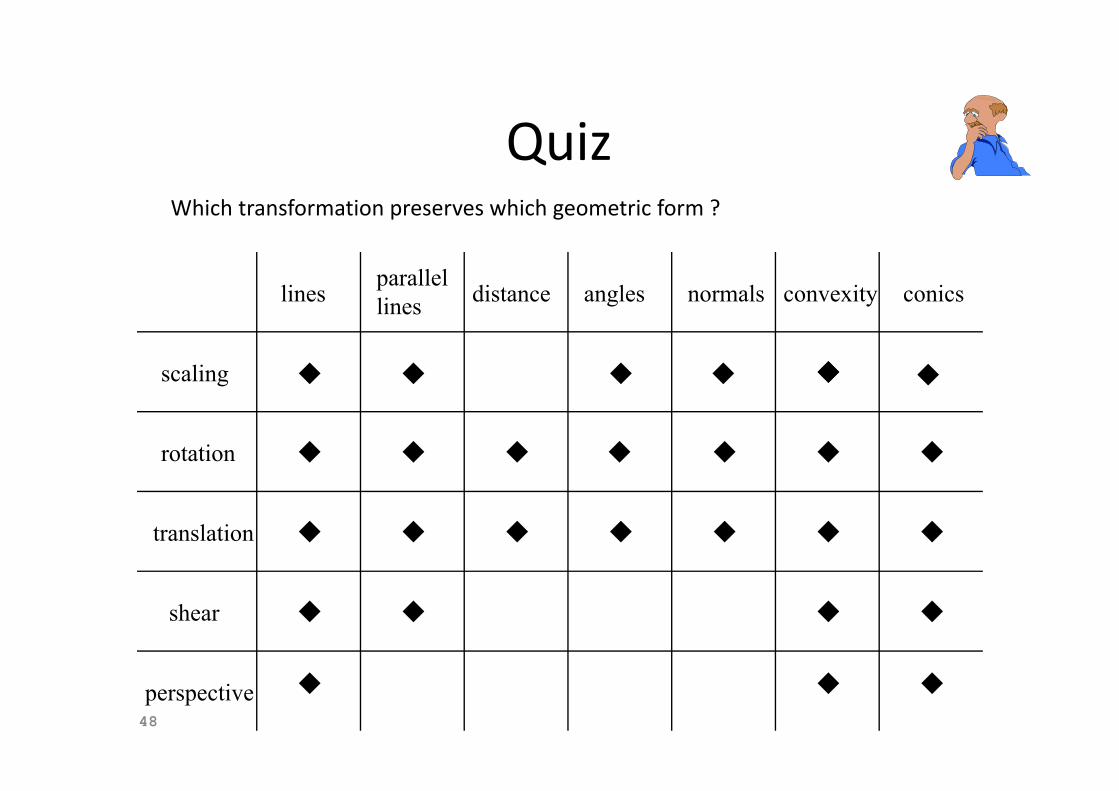
QuizWhich transformation preserves which geometric form ?
linesparallellines distance angles normals convexity conics
scaling
rotation
translation
shear
perspective
48
49
3D Sidewalk Art by Julian Beever
50
51

52

53
54

55
56
57

58

59





























