Embed Size (px)
Citation preview

International Journal of Control and Automation
Vol.9, No.1 (2016), pp.81-92
http://dx.doi.org/10.14257/ijca.2016.9.1.08
ISSN: 2005-4297 IJCA
Copyright ⓒ 2016 SERSC
Trajectory Tracking Control of Underactuated AUV in the Presence of Ocean Currents
Xue Yang1 and Juan Li
2, *
1 College of Science and Information, Qingdao Agricultural University, Qingdao 266109, China [email protected]
2 College of Mechanical and Electrical Engineering, Qingdao Agricultural
University, Qingdao 266109, China [email protected]
Abstract
This paper addresses the trajectory tracking problem of underactuated autonomous
underwater vehicles (AUVs) in the presence of ocean currents on the horizontal plane.
The tracking control problem is reduced the problem of stabilizing the nonlinear tracking
error system to two separate problems. The backstepping technique is applied to design
tracking controller, and the conditions of control gains are derived such that the AUV can
track a reference AUV. Simulations results show the effectiveness of the proposed
trajectory tracking controller.
Keywords: AUV, trajectory tracking control, backstepping, Lyapunov method
1. Introduction
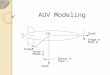
Autonomous Underwater Vehicles (AUVs) depicted in Figure 1, are playing a crucial
role in exploration and exploitation of resources located at deep oceanic environments.
They are employed in risky missions such as oceanographic observations, military
applications, recovery of lost man-made objects, etc [1]
. AUVs present a challenging
control problem since most of them are underactuated they have less actuator than state
variables to be tracked, imposing nonintegrable acceleration constraints. However, AUVs‟
models are highly nonlinear, making control problem a hard task.
{ }I X
Y
Z
{ }B
r uv
xy
z
uF
rF
Figure1. The Underactuated AUV Model
Recently, trajectory tracking control problem of underactuated AUVs has received a lot
of attention for the control community. Trajectory tracking issue refers to the case where
the vehicle tracks a reference trajectory generated by a suitable virtual vehicle a geometric
path on which a time law is specified. Note that when moving on a horizontal plane,
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
82 Copyright ⓒ 2016 SERSC
AUVs present similar dynamic behavior to underactuated surface vessels [2]
. A high gain
based, local exponential tracking result was obtained by applying the recursive technique
for the standard chain form systems [3]
. Based on Lyapunov‟s direct method and passivity
approach, two constructive tracking solutions were proposed for an underactuated surface
ship [4]
. The trajectory tracking problems of underactuated systems were solved based on
cascaded systems by many scholars. A full state feedback control law that make the
underactuated ship follow a straight line is developed using a cascaded approach [5]
. A
new cascade approach for global -exponential tracking of underactuacted ships was
derived [6]
. Based on sliding mode with eigenvalue decomposition and cascaded theory, a
control scheme for a line of sight guidance law of an underactuated AUV was proposed [7]
.
The control problem of tracking a desired continuous trajectory for an AUV in the
presence of gravity, buoyancy and fluid dynamic forces and moments was studied [8]
. The
hybrid control law is developed by combining sliding mode (SMC) and classical
proportional-integral-derivative (PID) control methods for the tracking control of an
underactuated AUV [9]
. A adaptive switching control combined with a nonlinear
Lyapunov-based tracking control are applied to solve the problem of position trajectory
tracking control for an underactuated AUV in the presence of possibly large modeling
parametric uncertainty [10]
. Based on the variable structure systems (VSS) theory and, in
particular, on the second-order sliding-mode (2-SM) methodology, a tracking controller is
designed for the AUV which includes the unmodelled actuator dynamics and the presence
of external uncertain disturbances [11]
.
In practice, an AUV must often operate in the presence of ocean currents. Motivated by
the considerations, this paper presents a solution to the trajectory tracking problem of the
underactuated AUV in the presence of ocean currents. We divide the tracking error system
into two simple subsystems which we can stabilize independently of each other. The
control algorithm proposed builds on Lyapunov stability theory and backstepping design
techniques.
The organization of the paper is as follows. Section 2 presents the AUV model and
problem formulation. Section 3 is devoted to the control design. Some simulations are
given in Section 4 to demonstrate the effectiveness of the proposed controller. Section 5
concludes the paper.
2. AUV Model and Problem Formulation
This section describes the kinematic and dynamic equations of motion of the AUV of
Figure 2 on the horizontal plane and formulates the problem of controlling it to track a
desired trajectory in the presence of ocean currents. Following standard practice, the
general kinematic and dynamic equations of motion of the AUV can be developed using a
global coordinate frame { }I and a body-fixed coordinate frame { }B that are depicted in
Figure 1.
u
vtv
x
y
{ }I
{ }B
rCV
CuCv
u
C
Figure 2. The Model of AUV on the Horizontal Plane in the Presence of Ocean Currents
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
Copyright ⓒ 2016 SERSC 83
Furthermore, we assume that the inertia, added mass and damping matrices are
diagonal. In the presence of ocean currents, the model of the AUV on the horizontal plane
can be described by
22 11
11 11 11
11 22
22 22
3311 22
33 33 33
cos sin cos
sin cos sin
1
1
r r C C
r r C C
r r r u
r r r
r r r
x u v V
y u v V
r
m du v r u F
m m m
m dv u r v
m m
dm mr u v r F
m m m
(1)
where ( , )x y denotes the coordinates of the AUV in the earth-fixed frame, is the
heading angle of the AUV, and ,u v and r denote the velocity in surge, sway and yaw
respectively, the surge force uF and the yaw torque
rF are consider as the control
inputs. In the presence of a constant and un-rotational ocean currents, , 0c cu v , u
and v are given by r cu u u and r cv v v , where ,r ru v is the relative
body-current linear velocity vector. The positive constant terms , 1 3iim i denote the
AUV inertia including added mass. The positive constant terms , 1 3jjd j represent
the hydrodynamic damping in surge, sway and yaw [12]
. For simplicity, we ignore the
higher nonlinear damping terms. Since the only two propellers are the force in surge and
the control torque in yaw, AUV model (1) is underactuated. In the equations, and for
clarity of presentation, it is assumed that the AUV is neutrally buoyant and that the centre
of buoyancy coincides with the centre of gravity. For system (1), we assume that a feasible reference trajectory
, , , , , , ,d d d d d d d dx y u v r X N is given, a trajectory satisfying
22 11
11 11 11
11 22
22 22
3311 22
33 33 33
cos sin
sin cos
1
1
d d d d d
d d d d d
d d
d d d d ud
d d d d
d d d d r d
x u v
y u v
r
m du v r u F
m m m
m dv u r v
m m
dm mr u v r F
m m m
Where , ,d d dx y denotes the desired position and orientation of the virtual AUV.
, ,d d du v r denotes the desired velocities. ,ud rdF F is the reference inputs in surge
and yaw.
Define the tracking errors
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
84 Copyright ⓒ 2016 SERSC
cos ( ) sin ( )
sin ( ) cos ( )
e d d
e d d
e d
e d
e d
e d
x x x y y
y x x y y
u u u
v v v
r r r
In this way, the closed-loop tracking error system can be expressed as shown in the
following equation
22 11
11 11 11
11 22
22 22
3311 22
33 33 33
(1 cos ) sin cos
sin (1 cos ) sin
1( ) ( )
1( ) (
e e e d e e e d e d C C
e e e d e e e d e d C C
e e
e d d e u ud
e e d e
e d d e r
x r y r y u u v V
y r x r x v u v V
r
m du vr v r u F F
m m m
m dv u r v
m m
dm mr uv u v r F
m m m
)r dF
(2)
The tracking control problem of the AUV is transformed to a stabilization one of (2).
Then, the problem considered in this paper can be formulated as follows:
Consider the underactuated AUV with the kinematic and dynamic equation given by
(1). Derive a feedback control law for uF and
rF such that closed-loop system (2) is
input-to-state stable in the presence of known ocean currents.
3 Controller Design
As mentioned above, the control objective now is to stabilize error system (2). Our
main goal is to subdivide the tracking control problem into two simpler and „independent‟
problems: position and orientation tracking, then we design the controllers for the two
subsystems independently. Specially, the velocity of ocean current is considered with
bounded input for the position tracking system. For simplicity, the reference velocity dr
is considered with constant value.
Theroem 1. Consider underactuated AUV system (2) with the control law
22 11 22 11 2 11 3 11( )e e eu ud e x d d e x uF F m v m z m vr v r d u k m z k m z (3)
11 22 33 33 4 33r rd d d e e eF F m m uv u r d r m k m r (4)
where ik ( 1,2,3,4i ) satisfies
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
Copyright ⓒ 2016 SERSC 85
11
3 2 2
1 22 22 1 22 22 11 22 11 222 4 ( ) ( ) 0d dk m d k m d m m r m m m r
112 1
22
mk k
m
3 4, 0k k
If udF ,
r dF are bounded and reference velocity dr satisfies
11
22
0 d
mr
m
and the velocity of ocean currents CV is bounded, then trajectory tracking error
system (2) is input-to-state stable.
Proof. The specific implementation process is divided into three steps:
Step 1: error system (2) can be written into the subsystem
22 111
11 11 11
11 22
22 22
cos (1 cos ) sin
sin sin (1 cos )
1( ) ( )
e d e e C C e d e d e e
e d e e C C e d e d e e
e d d e u ud
e e d e
x r y u V u v r y
y r x v V u v r x
m du vr v r u F F
m m m
m dv u r v
m m
: (5)
and the subsystem
2 3311 22
33 33 33
1( ) ( )
e e
e d d e r r d
r
dm mr uv u v r F F
m m m
: (6)
Based on Lyapunov theory, the stability of 1 is identified with the following system
22 113
11 11 11
11 22
22 22
cos
sin
1( ) ( )
e d e e C C
e d e e C C
e d d e u ud
e e d e
x r y u V
y r x v V
m du vr v r u F F
m m m
m dv u r v
m m
: (7)
Then, the next aim is to design control input uF and rF that stabilize the system
2 and 3 .
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
86 Copyright ⓒ 2016 SERSC
Step 2: Let
1
sine
C Cx e
d
Vk y
r
where 1k is a positive constant.
Introduce error variable
1
sine e
C Cx e x e e
d
Vz x x k y
r
Choosing the candidate Lyapunov function
22 2 222
1 2
11
1 1
2 2 2ee x e
d
mV y z v
m r
and computing its derivative, one gives
2
221 2
11
1 1 1
2
22 11 22
2
11 22 22
2 2 2 22 221 1 1 1
11
( sin ) ( cos sin )
( )
( cos )
e e
e
e e
e e x x e e
d
e d e e C C x d e e C C d e e C C
e e d e
d
d e e e d x x d e e e C C e e
mV y y z z v v
m r
y r x v V z r y u V k r x k v k V
m m dv u r v
m r m m
m m dk r y y v k r z z k r y u k v V u v
m
222
2
11
e
d
vm r
Let
2e eu xk z
where 2k is a positive constant. Introduce error variablee eu e uz u , considering
candidate Lyapunov function2
2 1
1
2 euV V z , its time derivative becomes
2 1
2 2 222 22 2 221 2 1 12
11 11
2 22 22 111 2
11 11 11 11
cos
1( ) ( )
e e
e e e
e e e e
u u
d e e e d x e x C C e x
d
d e x u x e d d e u ud x
V V z z
m d k mk r y y v k k r z v z V k v z
m r m
m m dk r y z z z v vr v r u F F k z
m m m m
(8)
Let (3) holds, (8) becomes
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
Copyright ⓒ 2016 SERSC 87
2 2 222 222 1 2 1 2
11
2 22 221 1 3
11
)
cos ( )
e
e e e ue
d e e e d x e
d
x C C e x d e x
m dV k r y y v k k r z v
m r
k mz V k v z k r y z k z
m
(&
(9)
For simplicity, we choose the parameters as
2 221
11
0k m
km
and 2 1 0dk k r (10)
Then (9) becomes
2 2 2 2 222 222 1 2 1 1 32
11
222
2 1 122 22 11
11 22 22 2 1
2 42 11 1
3 1
22 22 2 1
) cos
1
2 2 2( )
4 2( )
e e e ue
e
ue
d e e e d x e x C C d e x
d
d d de e x e
d d
d dd
d
m dV k r y y v k k r z v z V k r y z k z
m r
r k k r k rm d mv y z y
m r m d k k r
m r k rk z k r
m d k k r
(
2 22 1 cos2 e e
de x x C C
k k ry z z V
Obviously
2 2 22 1 2 1 2 1cos (1 ) cos2 2 2e e e e e
d d dx x C C x x x C C
k k r k k r k k rz z V z z z V
where 0 1 . If 2 12 ( )ex C dz V k k r , then
22 1 cos 02 e e
dx x C C
k k rz z V
(11)
So far, in order to ensure 2 0V ,the following inequality hold
2 4
11 11
22 22 2 1
04 2( )
d dd
d
m r k rk r
m d k k r
Then, taking into account equation (10), we have
11
3 2 2
1 22 22 1 22 22 11 22 11 222 4 ( ) ( ) 0d dk m d k m d m m r m m m r (12)
At this result, if 2 12 ( )ex C dz V k k r ,
2 0V ,the system 3 is input-to-state
stable.
Step 3: Considering the subsystem 2 and choosing Lyapunov
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
88 Copyright ⓒ 2016 SERSC
function2 2
3 3
1 1
2 2e eV r , the time derivative of
3V becomes
3
3311 22
33 33 33
1( )
e e e e
e d d e r r d e
V r r
dm mr uv u r r F F
m m m
(13)
Let (4) holds, then the previous derivative becomes2
3 4 0eV k r which means the
subsystem 2 is globally asymptotically stable.
For the overall system, we select the Lyapunov function2 3V V V , when controller
gains satisfy
11
3 2 2
1 22 22 1 22 22 11 22 11 222 4 ( ) ( ) 0d dk m d k m d m m r m m m r ,
112 1
22
mk k
m
3 4, 0k k
It is clear that the derivative of V satisfies
222
22 1 122 22 113
11 22 22 2 1
2 42 211 1
1 4
22 22 2 1
1
2 2 2( )
04 2( )
e ue
d d de e x e
d d
d dd e e
d
r k k r k rm d mV v y z y k z
m r m d k k r
m r k rk r y k r
m d k k r
where 2 12 ( )ex C dz V k k r . So system (2) is input-to-state stable.
4. Simulation Results
In order to illustrate the performance of the proposed control scheme in the presence of
a constant ocean current disturbance, simulations are carried out with a model of an AUV.
The AUV parameters are:
11 50m kg, 22 31.43m kg, 33 30m kg m2,
11 30d kg/s, 22 262d kg/s, 33 80d kg m2/s.
The initial conditions for reference AUV are chosen as:
(0) 3dx m, (0) 5dy m, 0 6d () rad,
(0) 5du m/s, (0) 0dv m/s, (0) 0.4dr rad/s
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
Copyright ⓒ 2016 SERSC 89
and the requirement
( ) 0.4dr t rad/s, ( ) 5du t m/s.
The initial states for the controlled AUV are chosen as:
(0) 1x m, (0) 2y m, 0 0 ( ) rad,
(0) 1ru m/s, (0) 0rv m/s, (0) 1r rad/s.
The velocity of ocean currents is 0.01CV m/s, orientation 3C rad. The
following results are obtained with controller gains chosen as
1 1k , 2 1 11 22k k m m ,
3 3k , 4 2k .
In Figure 3, the reference and the resulting trajectory of the AUV in the inertial X-Y
plane are displayed. From Figure 4 it can be seen that the errors of positions and
orientation converge to a very small neighborhood of zero, the AUV is not out of
control. The errors in velocities are depicted in Figure 5. After a short period of time, the
errors of velocities converge smoothly to zero. Figure 6 shows the control force uF and
the control torque rF needed for tracking.
-15 -10 -5 0 5 10 150
5
10
15
20
25
30
x,[m]
y,[
m]
Reference
Actual
Figure 3. AUV Reference and Actual Trajectory
0 5 10 15 20 25 30-4
-3.5
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
t,[s]
xe,[
m],
ye,[
m],
e,[
rad]
xe
ye
ψe
Figure 4. Positions and Orientation Errors
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
90 Copyright ⓒ 2016 SERSC
0 5 10 15 20 25 30-4
-3
-2
-1
0
1
2
3
t,[s]
ue,[
m/s
],v e
,[m
/s],
r e,[
rad/s
]
ue
ve
re
Figure 5. Velocity Tracking Errors
0 2 4 6 8 10 12 14 16 18 200
100
200
300
400
500
600
700
800
900
t,[s]
Fu,[
N],
Fr,[
Nm
]
Fu
Fr
Figure 6. Control Surge Force and Yaw Torque
5 Conclusions
In this paper, the trajectory tracking control problem for an underactuated AUV has been
addressed in the presence of a constant ocean current disturbance. The resulting control laws
have guaranteed input-to-state stability of the tracking error dynamics. The proposed approach
has reduced the problem of stabilizing the nonlinear tracking error system to two separate
problems of stabilizing simpler systems. The conditions of control gains that ensure the AUV
track a reference AUV have been given. Simulations have demonstrated the validity of the
designed trajectory tracking control scheme.
Acknowledgments
This work was supported by the National Natural Science Foundation of China
(61374126, 61379029), the Natural Science Foundation of Shandong Province
(ZR2013FM021), and the Doctor Research Startup Foundation of Qingdao Agricultural
University (631114341).
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
Copyright ⓒ 2016 SERSC 91
References
[1] R. Filoktimon and P. Evangelos, “Planar trajectory planning and tracking control design for under actuated AUVs”, Ocean Engineering, vol. 34, no. 11, (2007), pp. 1650-1667.
[2] A.P. Aguiar and A.M. Pascoal, “Dynamic positioning and way-point tracking of under actuated AUVs in the presence of ocean currents”, International Journal of Control, vol. 80, no. 7, (2007), pp. 1092-1108.
[3] K.Y. Pettersen and H. Nijmeijer, “Under actuated ship tracking control: theory and experiments”, International Journal of Control, vol. 74, no. 14, (2001), pp. 1435-1446.
[4] Z.P. Jiang, “Global tracking control of under actuated ships by Lyapunov‟s direct method”, Automatica, vol. 38, no. 1, (2002), pp. 301-309.
[5] K.Y. Pettersen and E. Lefeber “Way-point tracking control of ships”, Proceedings of the IEEE Conference on Decision and Control, (2001), December, pp. 940-945; Orlando, USA.
[6] T.C. Lee and Z.P. Jiang, “New cascade approach for global -exponential tracking of underact acted ships”, IEEE Trans on Automatic Control, vol. 49, no. 12, (2004), pp. 2297-2303.
[7] E. Borhaug and K.Y. Pettersen, “Cross-track control for under actuated autonomous vehicles”, Proceedings of IEEE Conference on Decision and Control, and the European Control Conference, (2005), December, pp. 12-15; Seville, Spain.
[8] A. Sanyal, N. Nordkviot and M. Chyba, “An almost global tracking control scheme for maneuverable autonomous vehicles and its discretization”, IEEE Transaction on Automatic Control, vol. 6, no. 2, (2010), pp. 457-462.
[9] S. Mohan and A. Thondiyath, “Investigations on the hybrid tracking control of an under actuated autonomous underwater robot”, Advanced Robotics, vol. 24, no. 11, (2010), pp. 1529-1556.
[10] A.P. Aguiar and J.P. Hespanha, “A trajectory-tracking and path-following of under actuated autonomous vehicles with parametric modeling uncertainty”, IEEE Transaction on Automatic Control, vol. 52, no. 8, (2007), pp. 1362-1379.
[11] G. Bartolini and A. Pisano, “Black-box position and attitude tracking for underwater vehicles by second-order sliding-mode technique”, International Journal of Robust and Nonlinear Control, vol. 20, no. 4, (2010), pp. 1594-1609.
[12] T.I. Fossen, “Guidance and control of ocean vehicles”, Wiley: New York, USA (1994)
Authors
Xue Yang, She received her doctor degree form Ocean
University of China in 2014. Her research interest covers
autonomous robots, nonlinear system control.
Juan Li, She received her doctor degree form Ocean University
of China in 2008. Her research interest covers fault diagnosis,
fault-tolerant control and nonlinear system control.
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.

International Journal of Control and Automation
Vol.9, No.1 (2016)
92 Copyright ⓒ 2016 SERSC
Online
Vers
ion O
nly.
Book m
ade b
y this
file i
s ILLEGAL.



![Dynamic Constraint-based Optimal Shape Trajectory Planner ... · Underactuated mechanical systems are systems with fewer independent control inputs than the degrees of freedom [1]](https://img.pdfslide.us/doc/110x75/5fa29fd55851cb2d883720b8/dynamic-constraint-based-optimal-shape-trajectory-planner-underactuated-mechanical.jpg)