Embed Size (px)
Citation preview

January 29, 2007
SWITCHED CONTROL STRATEGIES
FOR UNDERACTUATED SYSTEMS
R. N. Banavar
(Joint work with V. Sankaranarayanan)
Systems & Control Engg.
Indian Institute of Technology, Bombay
Mumbai -INDIA.

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Outline
• Nonintegrable constraints in mechanical systems, nonholonomic
systems and underactuated systems - a brief introduction
• Sliding modes and the switched control law philosophy
• Two examples
• Other issues of interest
1

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Classification of constraints in mechanical systems
• Holonomic constraints - restrict the allowable configurations of the
system
• Nonintegrable constraints - do not restrict the allowable
configurations of the system but restrict instantaneous
velocities/accelerations
– Velocity level constraints - parking of a car, wheeled mobile robots,
rolling contacts in robotic applications
– Acceleration level constraints - fuel slosh in spacecrafts/launch
vehicles, underwater vehicles, underactuated mechanisms (on
purpose or loss of actuator) systems - serial link manipulators
Underactuated systems
2
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
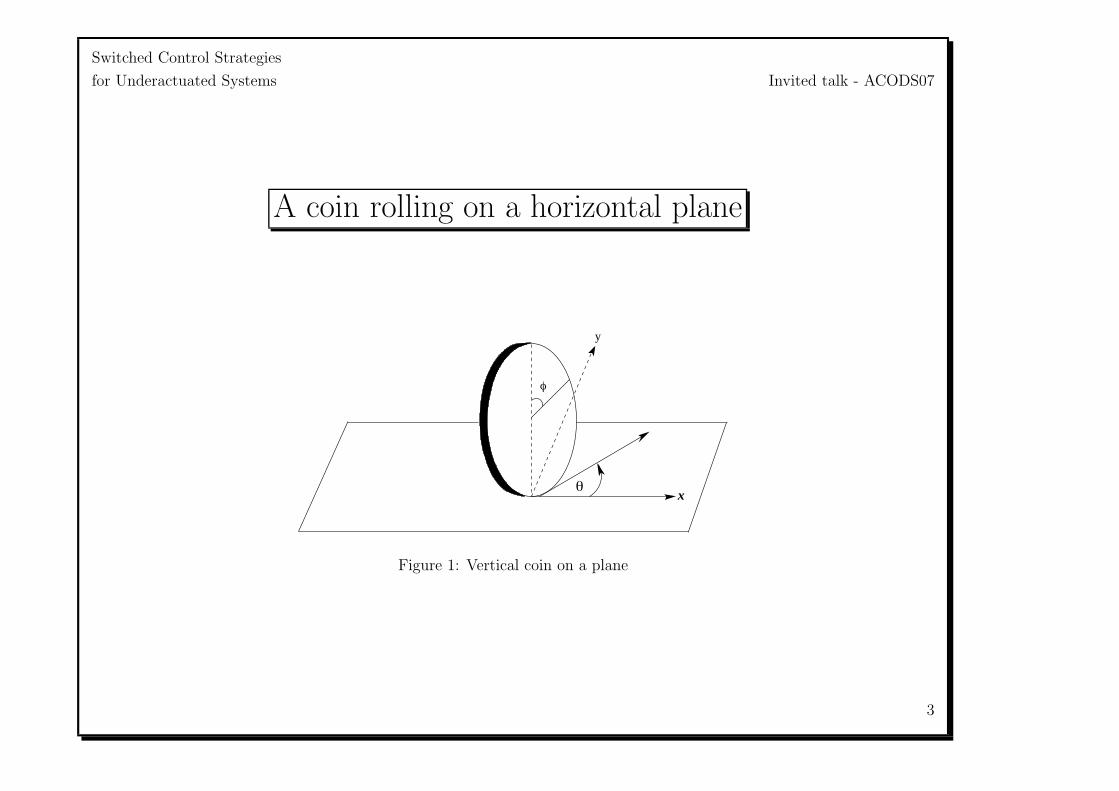
A coin rolling on a horizontal plane
x
y
θ
φ
Figure 1: Vertical coin on a plane
3
Switched Control Strategies
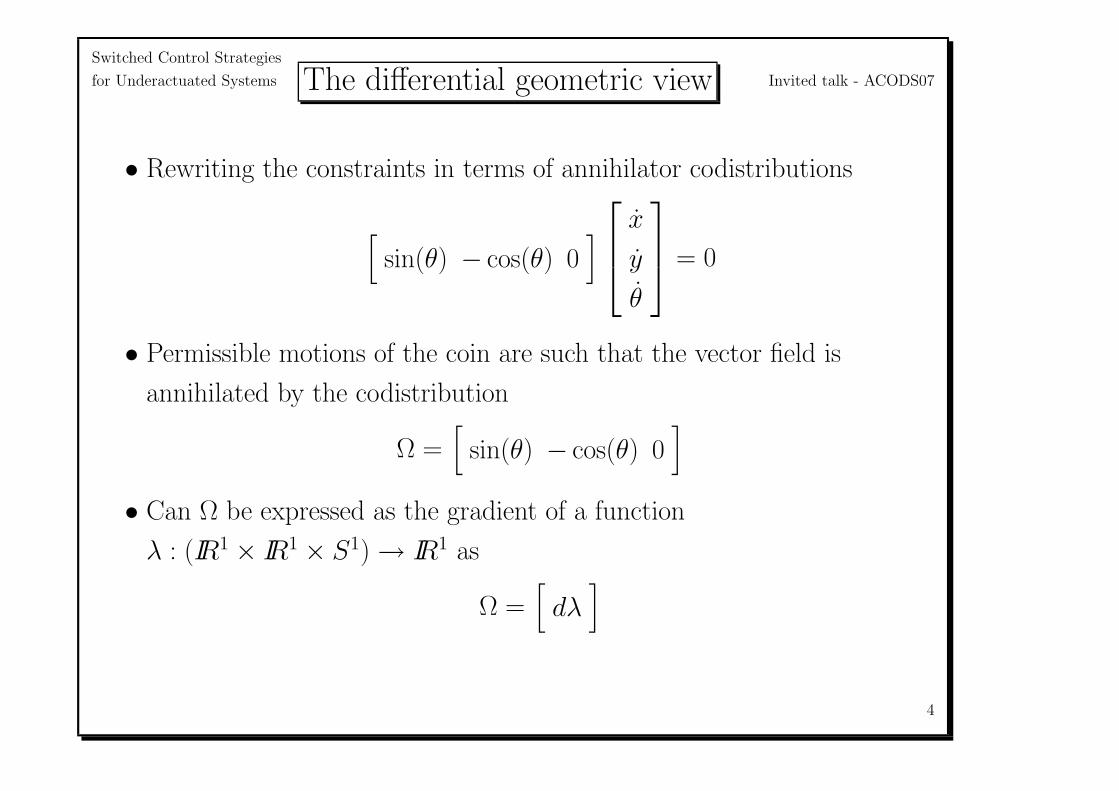
for Underactuated Systems Invited talk - ACODS07The differential geometric view
• Rewriting the constraints in terms of annihilator codistributions
[sin(θ) − cos(θ) 0
] x
y
θ
= 0
• Permissible motions of the coin are such that the vector field is
annihilated by the codistribution
Ω =[
sin(θ) − cos(θ) 0]
• Can Ω be expressed as the gradient of a function
λ : (IR1 × IR1 × S1) → IR1 as
Ω =[
dλ]
4
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Nonintegrable constraints - velocity level
• Mechanical system whose configuration evolves on a manifold Q with
kinematic constraints of the form
ωi(q)q = 0 i = 1, . . . , m
where ωi(q) are linearly independent one-forms on Q.
• Constraints are nonintegrable and hence the motion of the system is
not restricted to a lower dimensional submanifold.
• Motion is restricted to an (n − m) dimensional subspace of TqQ -
define a smooth distribution on Q
5

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Nonintegrable constraints - acceleration level
• Consider the manifold TQ and look at dynamic constraints of the form
αi(x)x = 0 i = 1, . . . , p
where x= (q, vq) are local coordinates for TQ, the αis are linearly
independent one-forms on TQ and vq= q.
• Constraints are nonintegrable and hence the motion of the system is
not restricted to a lower dimensional submanifold of TQ.
• The motion here is restricted at the acceleration level to an (n − p)
dimensional subspace of Tx(TQ) - define a smooth distribution on TQ
6
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
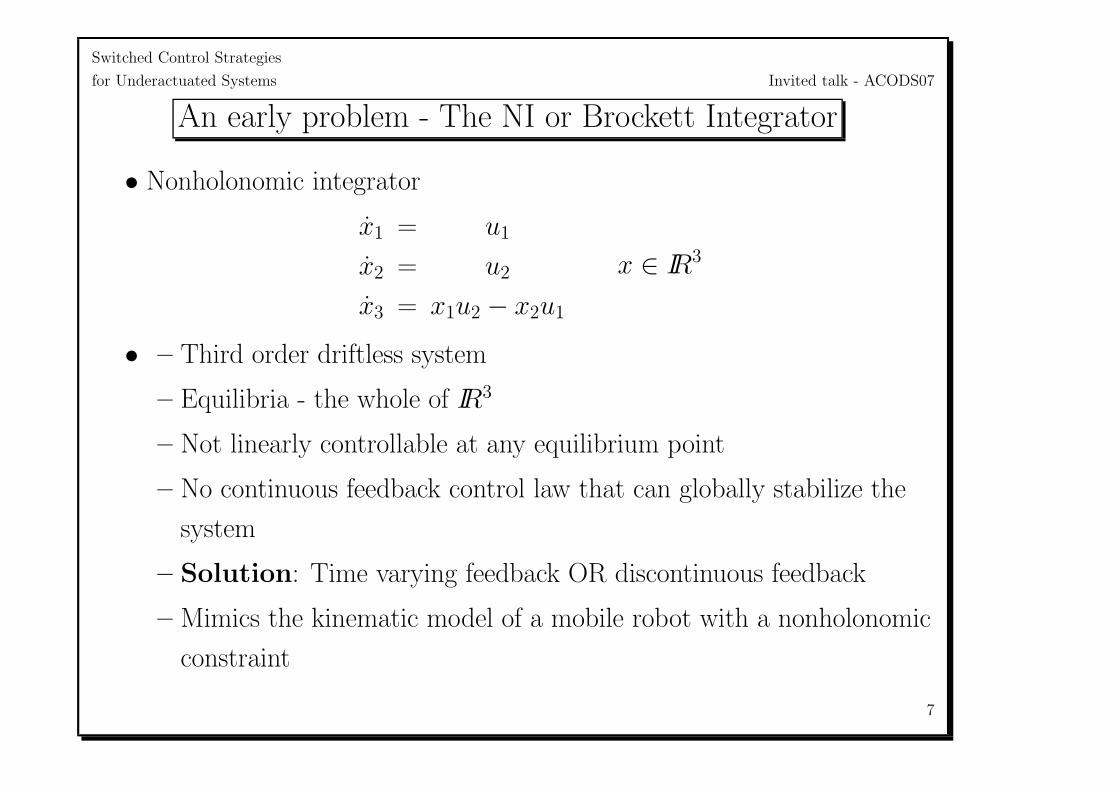
An early problem - The NI or Brockett Integrator
• Nonholonomic integrator
x1 = u1
x2 = u2
x3 = x1u2 − x2u1
x ∈ IR3
• – Third order driftless system
– Equilibria - the whole of IR3
– Not linearly controllable at any equilibrium point
– No continuous feedback control law that can globally stabilize the
system
– Solution: Time varying feedback OR discontinuous feedback
– Mimics the kinematic model of a mobile robot with a nonholonomic
constraint
7
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Past work
• Motion planning - Given x(0) = x0 and xf and a time interval
[0, tf ], find a control history u(·) (from an admissible class of functions)
such that x(tf) = xf .
• Stabilization - Compute a feedback control law that stabilizes the
system in a region (set) near the origin
• Exhaustive survey - A. M. Bloch - Nonholonomic Mechanics and
Control -Springer , 2003
8
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
System description
• Mechanical system with n configuration variables -((x, z)) - and with
m(< n) inputs at the acceleration level (torques/forces)
x = f (x, x) + g(x, x)u
• Nonintegrable dynamic constraint/coupling (acceleration level)
z = h(x, x, x, z, z)
• Let (x0, z0) denote an isolated equilibrium of the system. So we have
f (x0, 0) = 0 and h(x0, 0, 0, z0, 0) = 0
• Such a system, where m < n, will be referred to as an underactuated
system.
9
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Standard form
• A recast to the standard form
ξ=
[x
x
]η
=
[z
z
]•
ξ =
[[0m Im]ξ
f (ξ)
]+
[0m
g(ξ)
]u
η =
[[0n−m In−m]η
h(ξ, ξ, η)
]or
ξ = fa(ξ) + ga(ξ)u
η = ha(ξ, ξ, η)
where ξ ∈ IR2m and η ∈ IR2(n−m).
10
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Velocity level constraints
• Systems are of the form
x = f (x, x) + g(x, x)u
• Nonintegrable kinematic constraint/coupling (velocity level)
z = h(x, x, z)
• Standard form
ξ = fa(ξ) + ga(ξ)u
η = ha(ξ, η) (1)
where ξ ∈ IR2m and η ∈ IR(n−m).
Remark 1 If our interest lies in the kinematics alone, equation
(1) would have the same form as equation (1) with the inputs being
now considered at the velocity level.
11
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Assumptions
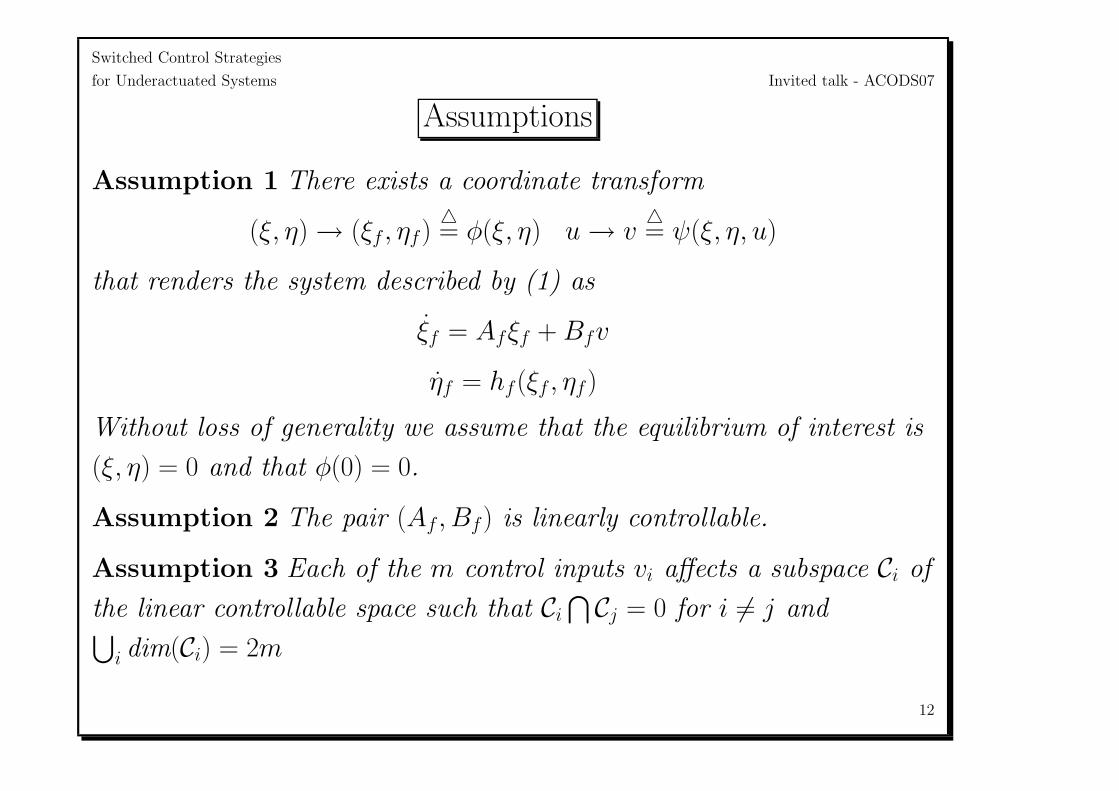
Assumption 1 There exists a coordinate transform
(ξ, η) → (ξf, ηf)= φ(ξ, η) u → v
= ψ(ξ, η, u)
that renders the system described by (1) as
ξf = Afξf + Bfv
ηf = hf(ξf, ηf)
Without loss of generality we assume that the equilibrium of interest is
(ξ, η) = 0 and that φ(0) = 0.
Assumption 2 The pair (Af, Bf) is linearly controllable.
Assumption 3 Each of the m control inputs vi affects a subspace Ci of
the linear controllable space such that Ci
⋂Cj = 0 for i = j and⋃
i dim(Ci) = 2m
12
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Control objective
• We have m control inputs that affect m mutually disjoint subspaces of
the linear system
• Each of these may be used to stabilize these linear subsystems
• But then some must also utilized to simultaneously stabilize the
unactuated dynamics
• Philosophy outlined below - case with kinematic constraints but the
procedure is similar for the case with dynamic constraints
13
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Control philosophy
• Step 1: Each of the initial (2m − n) controls are chosen such that
either of the following objectives is achieved
– The corresponding linear subsystem trajectory either converges
asymptotically to the equilibrium OR
– The linear subsystem trajectory converges to a surface containing
the equilibrium in finite-time. Surface rendered positively invariant
by the control law and the trajectory of the linear subsystem is
asymptotically stable on this surface.
14
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Control philosophy
• Step 2: The next (n − m) control inputs are chosen such that they
achieve two objectives - stabilization of the (n − m) unactuated
variables and the remaining (n − m) linear subsystems. Once again our
objective is either one of the following
– We judiciously pick the surfaces for the (n − m) linear subsystems
such that the unactuated dynamics are stable on these surfaces OR
– We pick the desired surfaces for the unactuated dynamics and ensure
that the system is driven to these surfaces by the remaining control
inputs.
15
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Features of the control law
Two features of our proposed control laws, which are also their inherent
limitations, are
1. Avoidance of thin sets: They work with initial conditions starting in
an appropriate set. Notion of stability that we employ is termed
relative stability and we define these thin sets for every problem.
2. Switching: To avoid singularities and ensure that the states do not get
unbounded, we prescribe a switching strategy.
16

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Finite time stabilization to the surface S(x) = 0
• The dynamics of the surface is given by
S = −ksS1/3 ks > 0
• Consider a Lyapunov candidate function and its rate of change
V = S2/2
V = −ksS4/3 < 0
Hence S = 0 is attractive globally.
• For finite time convergence we show
V + kV α ≤ 0 ([Haimo] condition for finite-time stability)
where α ∈ (0, 1) and k > 0
17
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
• For α = 2/3 and k < 223ks we have
V + kV23 = −S4/3(ks −
k
223
) < 0
• Further
S = 0
when S = 0 which implies that S = 0 is positively invariant.
18
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
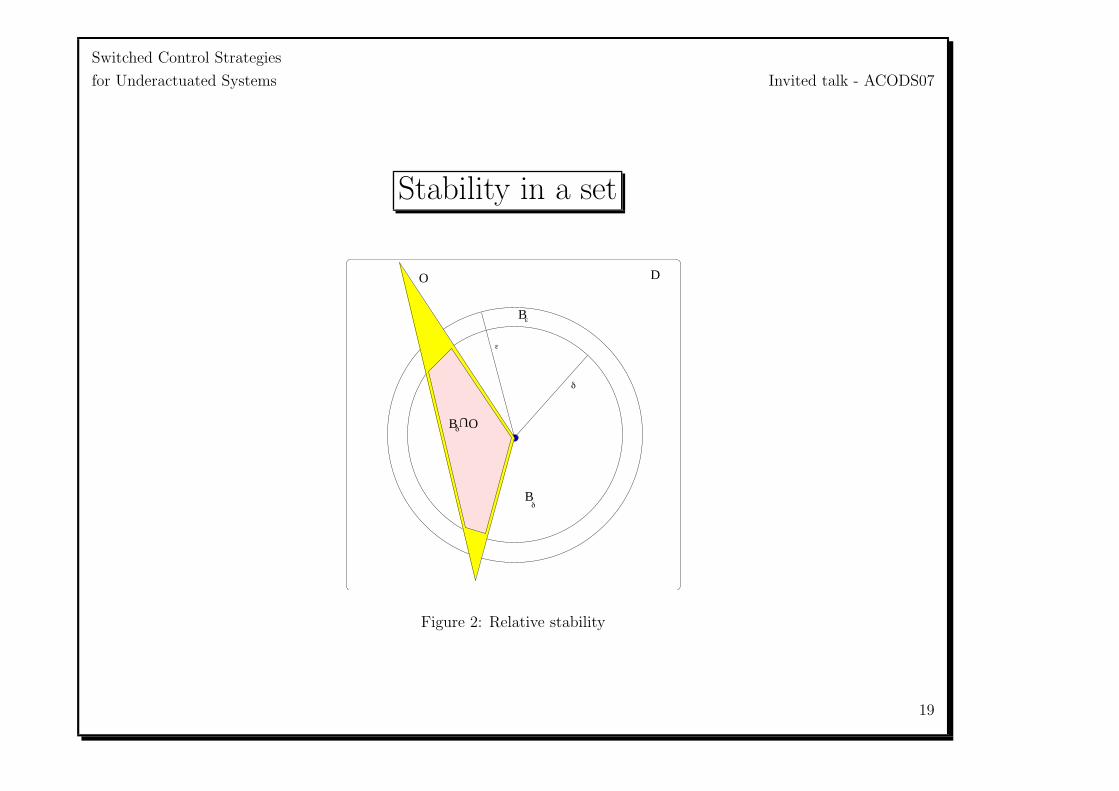
Stability in a set
D
Bε
Bδ
δ
ε
Bδ
U
O
O
Figure 2: Relative stability
19

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
A wheeled mobile robot on a horizontal plane
x
y
θ
τ1
τ 2
Figure 3: Schematic of a mobile robot
20
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
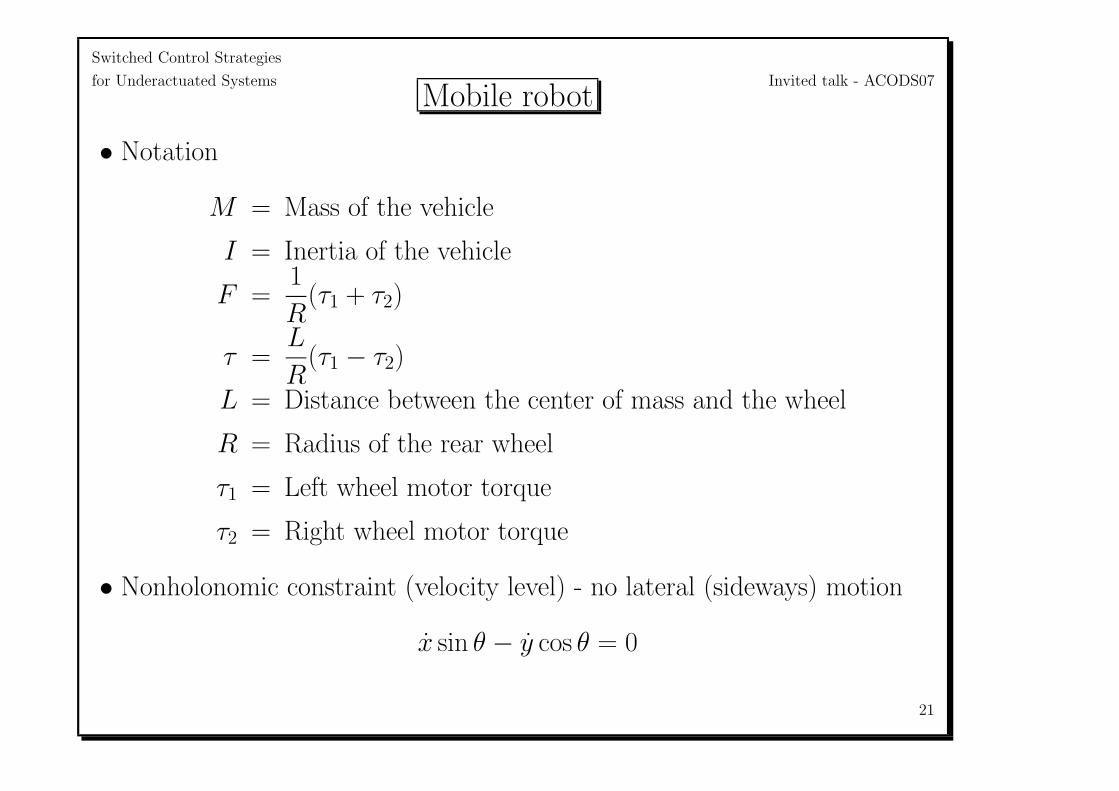
Mobile robot
• Notation
M = Mass of the vehicle
I = Inertia of the vehicle
F =1
R(τ1 + τ2)
τ =L
R(τ1 − τ2)
L = Distance between the center of mass and the wheel
R = Radius of the rear wheel
τ1 = Left wheel motor torque
τ2 = Right wheel motor torque
• Nonholonomic constraint (velocity level) - no lateral (sideways) motion
x sin θ − y cos θ = 0
21

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Kinematics and Dynamics
• Generalized coordinates - position of the center of mass (x, y) and
orientation θ
• Constraints of motion
x sin θ − y cos θ = 0 No lateral motion
• Equations at the kinematic level
θ = ω x = v cos θ y = v sin θ
- drive v and steer ω
• Dynamics - (control inputs are forces and torques)
Mv = F
Iω = τ
22

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Dynamic model of the mobile robot
• θ
x
y
v
ω
=
ω
v cos θ
v sin θ
0
0
+
0
0
01M
0
F +
0
0
0
01I
τ
• Fifth order system with drift
• With a coordinate transform, resembles the extended nonholonomic
double integrator
23
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
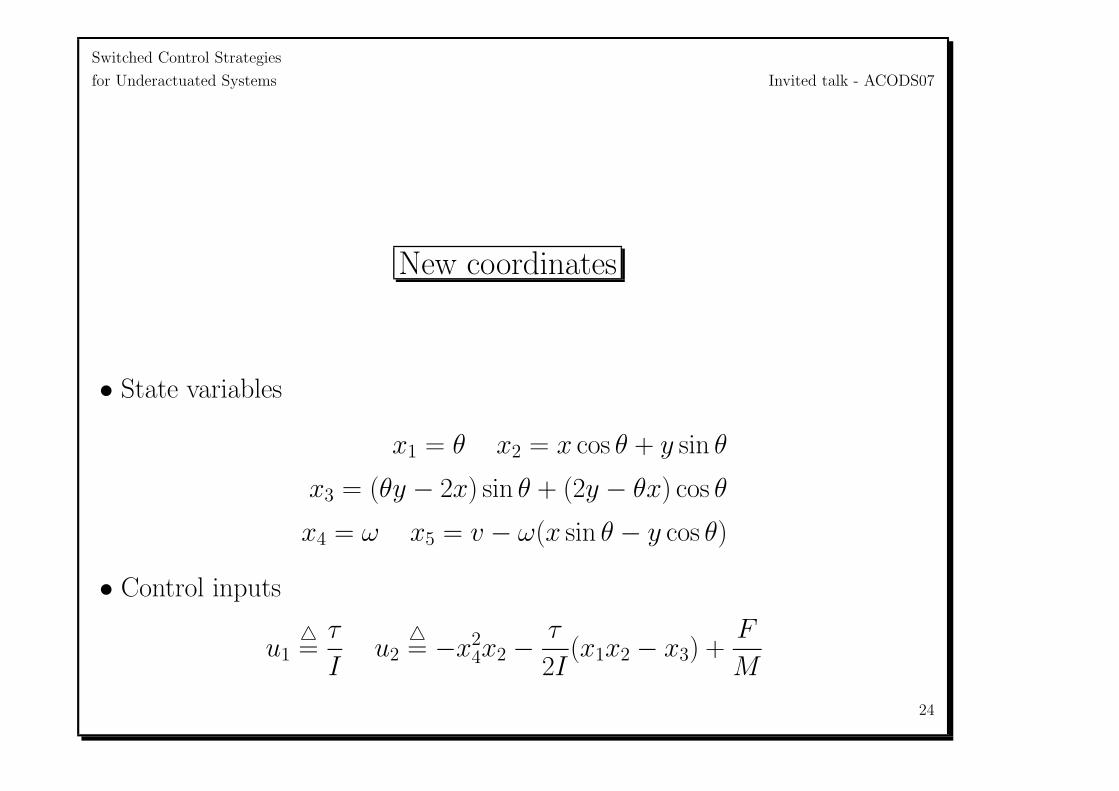
New coordinates
• State variables
x1 = θ x2 = x cos θ + y sin θ
x3 = (θy − 2x) sin θ + (2y − θx) cos θ
x4 = ω x5 = v − ω(x sin θ − y cos θ)
• Control inputs
u1=
τ
Iu2
= −x2
4x2 −τ
2I(x1x2 − x3) +
F
M
24
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
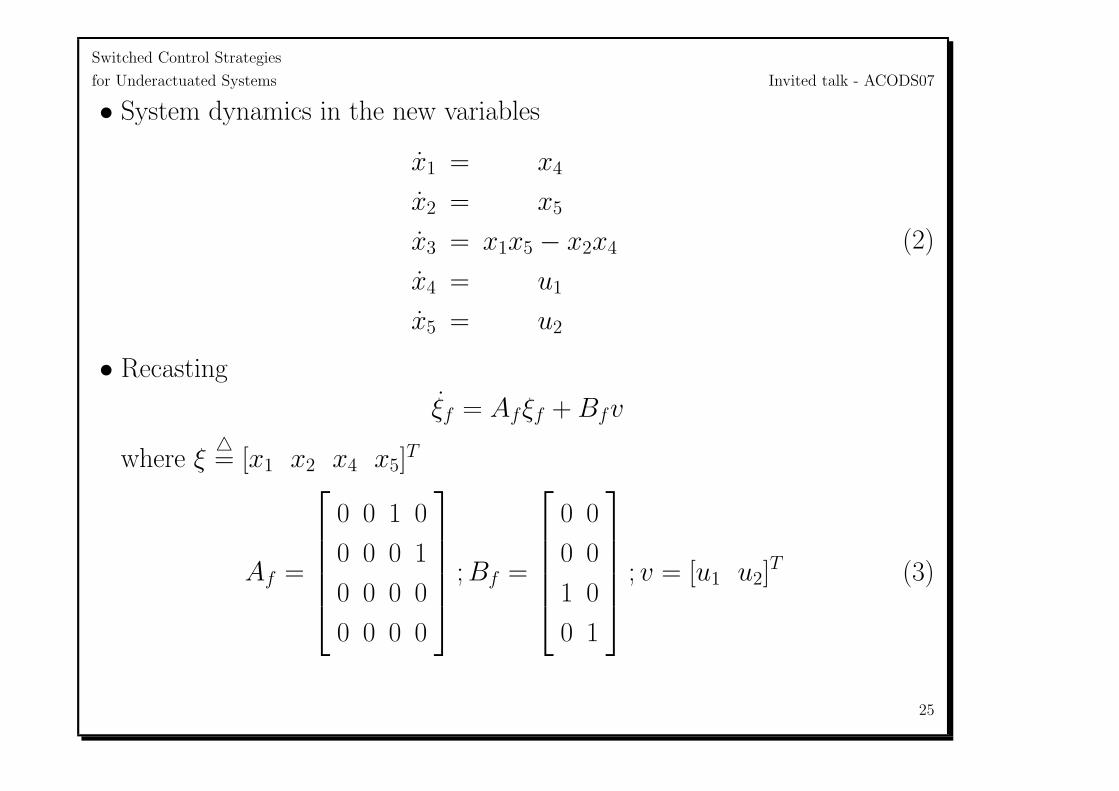
• System dynamics in the new variables
x1 = x4
x2 = x5
x3 = x1x5 − x2x4
x4 = u1
x5 = u2
(2)
• Recasting
ξf = Afξf + Bfv
where ξ= [x1 x2 x4 x5]
T
Af =
0 0 1 0
0 0 0 1
0 0 0 0
0 0 0 0
; Bf =
0 0
0 0
1 0
0 1
; v = [u1 u2]T (3)
25
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
and
η = hf(ξ)
where η= x3 and
hf(.) = x1x5 − x2x4 (4)
26

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
The Extended Nonholonomic Double Integrator (ENDI)
x = f (x) +
2∑i=1
gi(x)ui
where x= [x1, x2, x3, y1, y2]
T ∈ IR5 is the state vector and
u= [u1, u2] ∈ IR2 is the control
f (x)=
y1
y2
x1y2 − x2y1
0
0
; g1(x)=
0
0
0
1
0
; g2(x)=
0
0
0
0
1
27
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
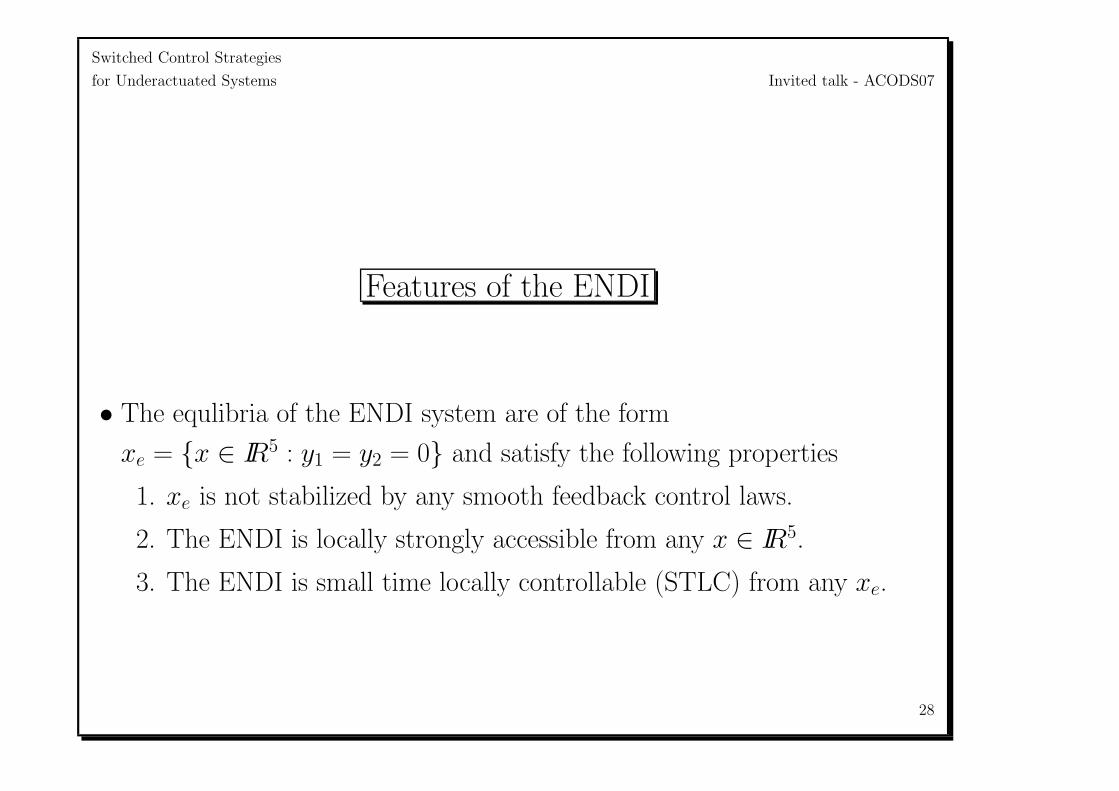
Features of the ENDI
• The equlibria of the ENDI system are of the form
xe = x ∈ IR5 : y1 = y2 = 0 and satisfy the following properties
1. xe is not stabilized by any smooth feedback control laws.
2. The ENDI is locally strongly accessible from any x ∈ IR5.
3. The ENDI is small time locally controllable (STLC) from any xe.
28
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
The proposed methodology
• Step 1: Stabilize linear subsystem - x1 and x4. Consider the surface
S1(x)= k1x1 + x4 = 0
and the control law
u1 = −Sα1 − k1x4
that achieves the objective of reaching the surface S1 = 0 in finite time
and further x1, x4 converge to zero as time goes to infinity.
• Step 2: Stabilize linear subsystem defined by x2 and x5 as well as the
unactuated variable η.
29
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
• Consider the surface
S2(x)= x1x5 − x2x4 + k3x3 = 0
where k3 > k1 > 0 and the control law
u2 =−S
1/32 − k3(x1x5 − x2x4) + x2u1
x1
that takes the system to the surface in finite-time and further assigns
stable linear dynamics to η.
• However, note that this control is not valid when x1 = 0. This can be
avoided by switching the controller between u1 and u2 as follows.
• Switching logic: First switch on u1 such that the system trajectory
reaches a 4 dimensional manifold x : S1(x) = 0 and with x1 = 0. Then
switch on the controller u2 which leads the trajectory to the 3
dimensional manifold x : S1(x) = S2(x) = 0.
30
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
• The dynamics of the system on this manifold is
x1 = −k1x1
x2 = −k1x2 − k3x3x1
x3 = −k3x3
(5)
• k3 > k1 > 0 ⇒ limt→∞ |x3(t)x1(t)
| = 0
31
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Proposition 1.1 The origin of the mobile robot (2) is attractive almost
globally and the trajectories converge exponentially to the origin in the
set O = x : S1(x) = S2(x) = 0 \ x1 = 0 under the following control
law
u1 = −Sα1 − k1x4 if x1 = x4 = 0
u2 =
−S1/32 −k3(x1x5−x2x4)+x2u1
x1if x : S1 = 0 \ x1 = 0
−x2 − x5
32
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Simulation
• Initial conditions are x(0) = −1.5m, y(0) = 4m, θ(0) = −2.3rad, ω(0) =
1rad/sec, v(0) = −1m/sec.
• Controller parameters are k = 0.5, k3 = 1.
• Vehicle parameters are M = 10Kg, I = 2Kgm2, L = 6cm, R = 3cm.
33
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
34
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
0 10 20 30 40 50−4
−2
0
2
4
6
time in sec
x,y,θ
0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5
time in sec
v,ω
0 10 20 30 40 50−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
time in sec
τ 1,τ2
0 10 20 30 40 50−2
0
2
4
6
8
time in sec
S1,S
2
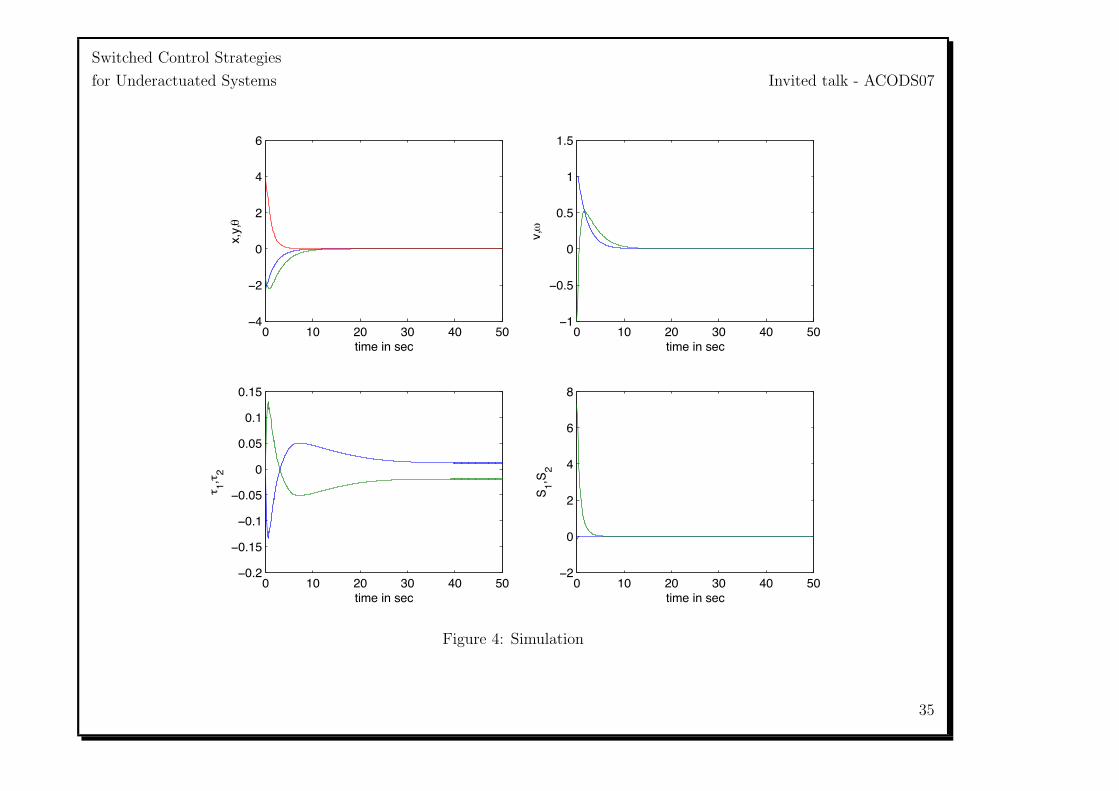
Figure 4: Simulation
35
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
36

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
−5 −4 −3 −2 −1 0 1 2 3 4 5−5
−4
−3
−2
−1
0
1
2
3
4
5
initial configuration
final configuration
x in meters
y in
met
ers
Figure 5: Stabilization to the origin
37
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
38
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
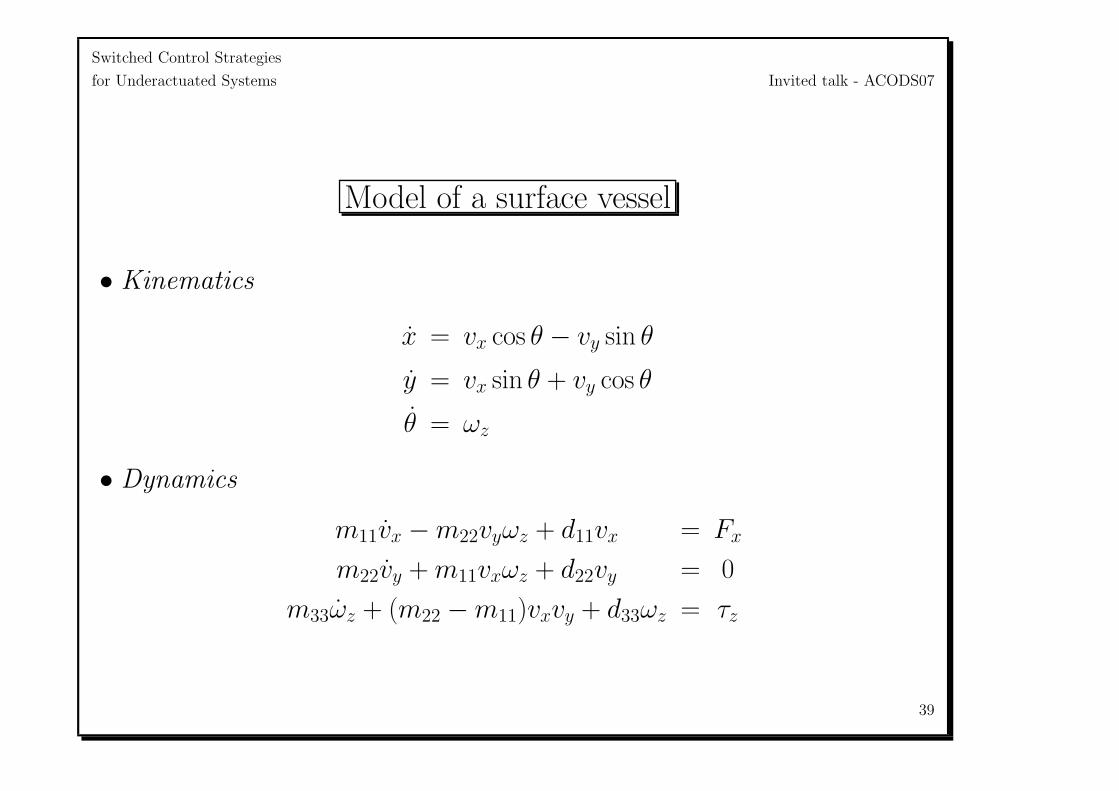
Model of a surface vessel
• Kinematics
x = vx cos θ − vy sin θ
y = vx sin θ + vy cos θ
θ = ωz
• Dynamics
m11vx − m22vyωz + d11vx = Fx
m22vy + m11vxωz + d22vy = 0
m33ωz + (m22 − m11)vxvy + d33ωz = τz
39
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
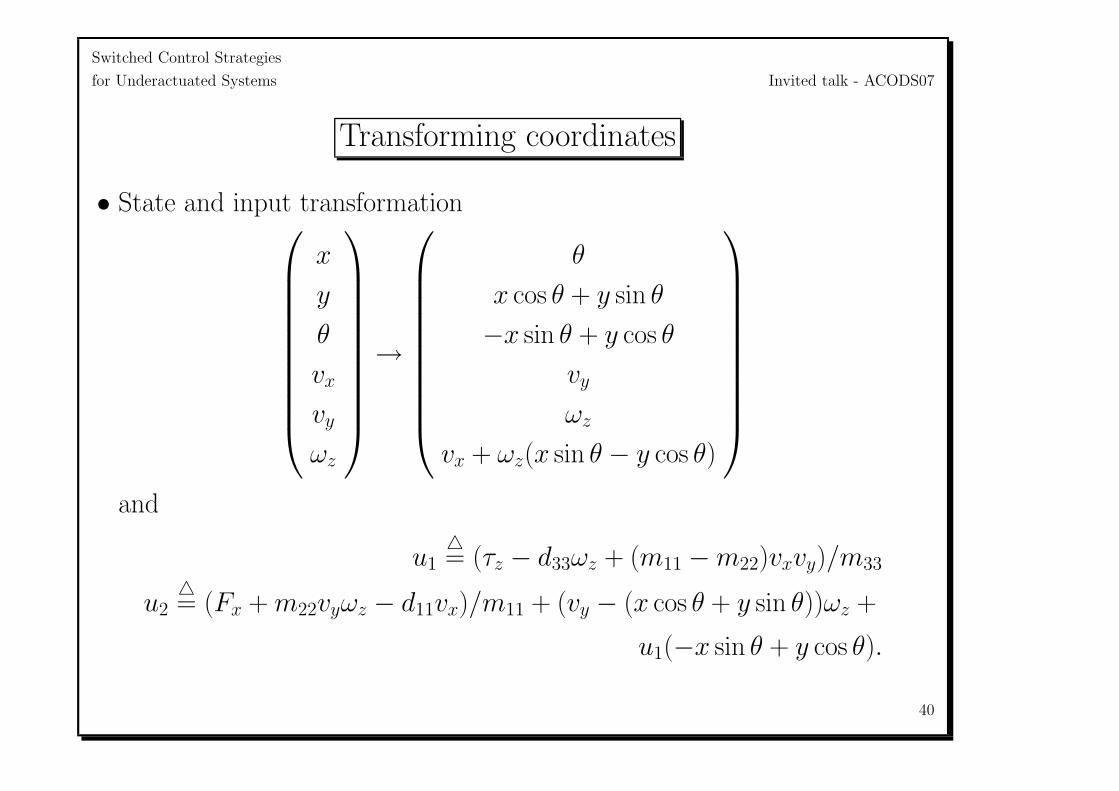
Transforming coordinates
• State and input transformation
x
y
θ
vx
vy
ωz
→
θ
x cos θ + y sin θ
−x sin θ + y cos θ
vy
ωz
vx + ωz(x sin θ − y cos θ)
and
u1= (τz − d33ωz + (m11 − m22)vxvy)/m33
u2= (Fx + m22vyωz − d11vx)/m11 + (vy − (x cos θ + y sin θ))ωz +
u1(−x sin θ + y cos θ).
40

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
The system in new coordinates
• Two linear subsystems and the unactuated subsystem as
x1
x2
x3
x4
x5
x6
=
x5
x6
x4 − x2x5
−αx4 + β(x25x3) − βx5x6
u1
u2
(6)
where α= d22
m22and β = m11
m22
41
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
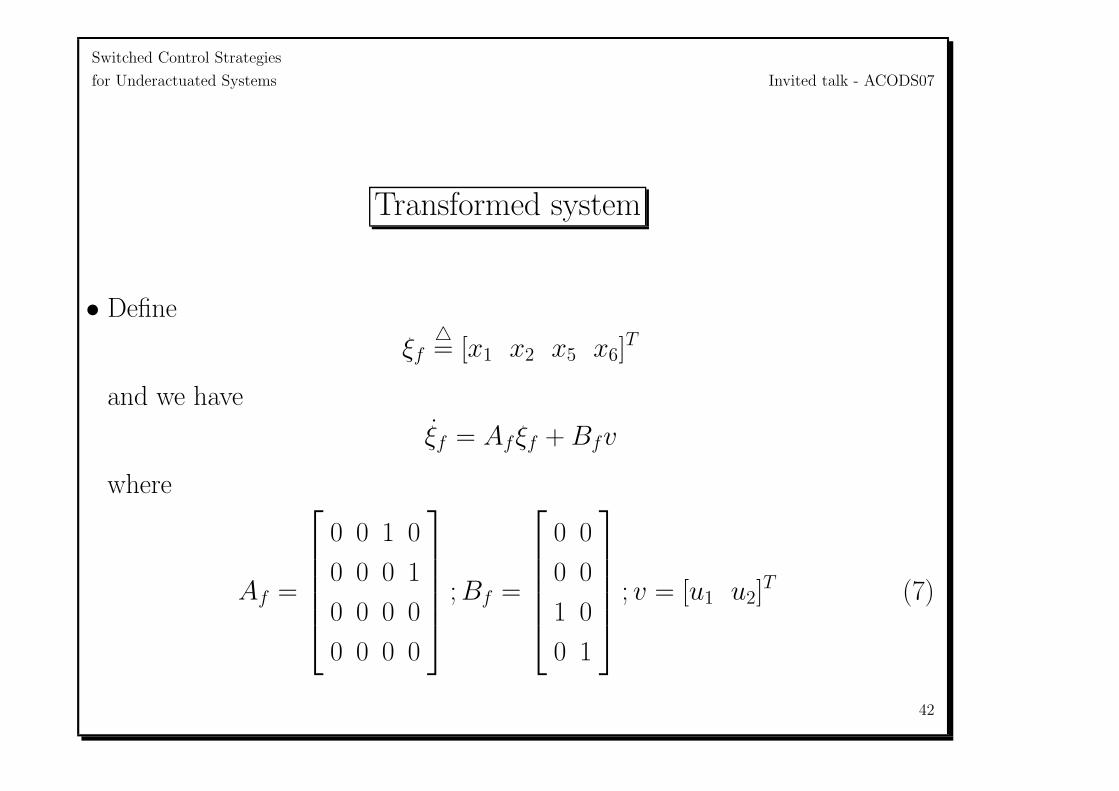
Transformed system
• Define
ξf= [x1 x2 x5 x6]
T
and we have
ξf = Afξf + Bfv
where
Af =
0 0 1 0
0 0 0 1
0 0 0 0
0 0 0 0
; Bf =
0 0
0 0
1 0
0 1
; v = [u1 u2]T (7)
42
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
• Further define
η= [x3 x4]
T
which yields
η = hf(η, ξf)
where
hf(.) =
(x4 − x2x5
−αx4 + β(x25x3) − βx5x6
)(8)
43
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
The proposed methodology
• Step 1 - Stabilize the linear subsystem governed by x1 and x5. Consider
the function
S1(x)= x1 + x5
and the control law
u1 = −Sα1 − x5
44
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
• Step 2 - Stabilize the second linear subsystem defined by x2, x6 and the
unactuated dynamics η. Consider the surface
S2(x)= αx3 + x4 = 0
and another surface (its time derivative)
S3(x)= S2(x) = −x5(αx2 − βx5x3 + βx6) = 0
Assigning the dynamics such that S2 = 0 and S3 = 0 are achieved in finite
time results in
S2 = S3
S3 = −Sα2 − Sβ
3
45
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Control law and switching logic
• The control law u2 is extracted as
u2 =uf + u1(αx2 − βx5x3 + βx6)
− x5− αx6 + βu1x3 + βx5x4 + βx2
5x2
where
uf= −Sα
2 − Sβ3
Note that this control is not defined on x5 = 0. This condition can be
avoid using a switching between the controllers as follows.
• Switching logic: First switch on control u1 so that the trajectory
reaches the 5 dimensional surface x : S1(x) = 0. Then switch on the
control u2 such that the trajectory reaches the 3 dimensional surface
x : S1(x) = S2(x) = S3(x) = 0.
46

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Stability
• The dynamics on this 3 dimensional surface is
x1 = −x1
x2 = −αβx2 + x3x5
x3 = −αx3 − x2x5
(9)
• Using the Lyapunov candidate function
V (x) =x2
1
2+
x22
2+
x23
2and its time derivative
V (x) = −x21 −
α
βx2
2 − αx23
< 0 ∀x = 0
and V = 0 only when x = 0.
47
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Summary
Proposition 1.2 The origin of the UUV (6) is almost globally
attractive and relatively asymptotically stable with respect to the set
O = x : S1 = S2 = S3 = 0 \ x5 = 0 under the following control law
u1 = −Sα1 − x5 if (x1, x5) = 0
u2 =
uf+u1(αx2−βx5x3+βx6)
−x5− αx6 + βu1x3 + βx5x4 + βx2
5x2 if x : S1 = 0 \ x5 = 00 o
48

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Simulation
• Initial conditions - θ(0) = 2rad/sec, x(0) = 1m, y(0) = 5m, vx(0) =
m/sec, ωz(0) = 0.5rad/sec, vy(0) = 1m/sec
• Vehicle parameters are
m11 = 100, m22 = 125, m33 = d11 = 35, d22 = 100, d33 = 50
49
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
50

Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
0 5 10 15 20 25−4
−2
0
2
4
6
8
10
time in sec
θ,x,
y
0 5 10 15 20 25−8
−6
−4
−2
0
2
4
6
time in sec
v x,vy,ω
z
0 5 10 15 20 25−1500
−1000
−500
0
500
time in sec
Fx,τ
0 5 10 15 20 25−4
−2
0
2
4
6
8
10
time in sec
S1,S
2,S3
Figure 6: Simulation
51
Switched Control Strategies
for Underactuated Systems Invited talk - ACODS07
Thank You
52


























