Embed Size (px)
Citation preview

TORQUE-ASSIST WHEELCHAIR Team SCSG, Ohio University – Mechanical Engineering, April 11, 2008
Shane M. Bickmeier, Jason D. Denhart, James T. Erkard III, Melissa R. Feigi Brian A. Kaufman, Evan W. Koontz, Austin M. Seigneur, Bryan T. Russell
ABSTRACT
A mechanical engineering team from Ohio University designed and built a torque enhancing wheel module adaptable to many wheelchairs. Developed in conjunction with Dr. Carolyn Lewis, a manual wheelchair user and OU employee, the torque-assist wheelchair provides assistance commuting to work and throughout a normal work day while allowing the user to maintain both independence and upper body strength. Dr. Lewis specified certain inclines she encounters frequently during work that measured in the range of 6o- 8o and were difficult for her to ascend in a manual wheelchair. The final design utilizes a mechanically geared wheel that is safe, lightweight, inexpensive, durable, and adaptable to many standard wheelchairs. The design has a direct drive and a setting for a 25% reduction in effort. The torque-assist gear sufficiently reduces the physical exertion necessary to climb steep inclines, and thus increases personal independence for Dr. Lewis in the campus work environment. BACKGROUND
At Ohio University, Senior Design is a year-long course that provides a comprehensive, capstone experience for mechanical engineering majors. The course includes analytical techniques of design, as well as the design, construction, and performance evaluation of an actual engineering system. This year, the design focus was on assistive technology solutions to support people with disabilities in the workplace.
In brief, the progress of the project was strictly regimented through hard deadlines set by the mechanical engineering department. Priorities, including team goals and project milestones, were determined as a team with the help of faculty advisors. The project team consists of eight senior mechanical engineering students. Combined, the team members have over five years of co-op experience with some of the top companies in Ohio. Dr. Greg Kremer, Dr. Israel Urieli, and Randy Mulford oversaw the project throughout the year.
Dr. Carolyn Lewis, a wheelchair user, was approached for help at the start of the design project and generously supported the team throughout the process. Dr. Lewis has a Ph.D. in Communication Studies from Ohio University in Athens. Since 1997, she has been director and general manager of the WOUB Center for Public Media at Ohio University. The Center provides digital television services, operates a cable channel, five FM stations, one AM station, and a radio reading service. A wheelchair intervention gave the team an opportunity to help Dr. Lewis and possibly the other one in two-hundred fifty Americans confined to a wheelchair [1]. PROBLEM STATEMENT
The team identified a local need for torque-assist wheelchairs for working individuals wanting to maintain upper-body strength through the use of a manual wheelchair, but who occasionally need assistance to overcome obstacles like steep grades that make wheelchair mobility difficult. Torque-assist means that the user must apply less force in order to propel the wheelchair. The project addresses the topic of mobility and wheelchair interventions as listed by NISH.
RATIONALE
The torque-assist wheelchair idea came about through discussions with Dr. Carolyn Lewis. Daily, she has difficulties climbing typical wheelchair ramps as well as traversing the hilly, diverse terrain encountered while working on campus. For example, she cannot easily use the main ramp at
1

TORQUE-ASSIST WHEELCHAIR
her own building because it is too steep. Also, her job frequently requires travel between different buildings at Ohio University for which she must often rely on a cab service.
Dr. Lewis is passionate about staying in a manual wheelchair. A manual-style wheelchair allows her to maintain upper body strength and personal independence. The solution to Dr. Lewis’ mobility limitations is a wheelchair that only provides additional assistance upon the user’s command, and otherwise operates as a normal manual wheelchair. There are many torque enhancing products on the market, including mechanical solutions like Magic Wheels and electric wheelchairs [2, 3]. Also, the numerous patents on geared hub wheelchairs [4] and similar products may require licensing agreements if the team were to pursue commercialization of the new design. However, the existing products are often bulky, expensive, and not as mobile as a regular wheelchair, and do not provide an appropriate solution for Dr. Lewis. With the help of Dr. Lewis, the team identified requirements and specifications necessary for constructing a unique engineering solution that would eliminate some of the problems of existing products. DEVELOPMENT
The design goal focused on making the workplace less physically demanding and more independently maneuverable for Dr. Lewis. The design was constructed to allow an increase in torque output without adding significant weight to the wheelchair. Several circumstances were identified that could benefit from additional torque while working at Ohio University. They included ramps or hills that are too steep, uneven brick pathways, carrying heavy loads, traveling long distances, or fatigued upper body strength. Dr. Lewis identified several ramps and grades that she regularly struggles with during a typical workday. It was determined that inclines between 5 and 8 degrees posed varying levels of difficulty to climb in a manual wheelchair.
Knowing which ramp grades were difficult to traverse allowed the team to set specifications for the new wheelchair module design. The most important specification was the amount of additional torque that would be beneficial if supplied to the user. From Dr. Lewis’ input, the team concluded that the torque assistance should make difficult inclines up to 6 degrees require effort less than or equal to the effort needed to climb an ADA approved 4.8 degree ramp. Other important specifications such as cost, weight, size, and maneuverability were also determined. Cost was set at a maximum of $2000 which is 50% less than the majority of similar products [2]. No more than 15 pounds of weight could be added to the wheelchair in order to be competitive and avoid negating the torque-assist feature. The additional width to the wheelchair was set to under 3 inches so that doorways would not pose a problem, and the zero-turn radius maneuverability of a standard wheelchair could not be altered.
Dr. Lewis liked many of the features that a motorized wheelchair provided such as the ability to go over gravel and grass, and the ease of climbing ramps. However, she has avoided using a motorized chair to maintain her arm strength. Also, motorized chairs are often large, cumbersome, and cannot be folded. To meet her needs, the new torque-assist feature must be adaptable to an existing wheelchair, maintain its ability to fold, and resist environmental elements.
The team considered several concepts while designing the torque-assist wheelchair for Dr. Lewis. Originally, an electric motor that could be utilized when needed was pursued as a method of providing additional torque. Eventually, a mechanical solution was pursued because it eliminated the need for heavy batteries, recharging, and complex circuitry. A mechanical solution allows the wheelchair to be durable, lightweight, and still achieve varying levels of torque assistance. The possibilities of using planetary gears, a crank and chain, and geared levers were examined, but
2

TORQUE-ASSIST WHEELCHAIR
abandoned due to the need for bulky brackets surrounding the wheels. Finally, the team developed a feasible and effective 2-gear wheel system built around a modified 3-speed bicycle hub.
3-speed hubs are inexpensive at $75 apiece, weigh less than 3 pounds each, and in low gear provide an increase in torque [5]. The tradeoff for increased torque, however, is a reduction in speed. When the idea was presented to Dr. Lewis, she reiterated the high importance of the design being reliable, inexpensive, lightweight, and safe. She reminded us that a person in her situation relies on their wheelchair to live. Dr. Urieli, a bicycle enthusiast, helped the team understand the inner workings of geared bicycle hubs. Specifically, the Sturmey-Archer 3-speed hub [5] was selected for its proven durability and its sealed, lightweight package. The gears of the Sturmey-Archer hubs are protected from the environment and can shift gears while stationary or under loading. The design of the torque-assist wheelchair was separated into three stages: the geared hub modifications, the hand-wheel, and the shifter design. Integrated together, the three main sub-assemblies form a new wheel module usable on most wheelchairs. For some wheelchairs, new mounting brackets may be required. DESIGN Figures 1, 2, and 3 of the graphic attachment show Dr. Lewis in the completed prototype and several system-level images.
The Sturmey-Archer hub was modified before it was adapted to the wheelchair (See Figure 7). The reverse free-spinning feature of the bicycle hub was eliminated to provide the forward and reverse operation necessary to maneuver in a wheelchair. To accomplish this, the hub’s internal shifter-coupler was redesigned and a small key was added to the sub-assembly. Together the new shifter-coupler and key keep the hub from turning freely in reverse while still allowing the user to shift between gears. This modification also has the beneficial consequence of reducing the hub to 2-speeds, giving the wheelchair a 1:1 direct drive and a torque multiplying 1.33:1 gear ratio. The key was machined from high strength keystock and acts to lock-out the reverse ratcheting device inside the hub (See Figure 8). The shifting coupler was made from a steel alloy and then heat treated to achieve the desired strength and hardness (See Figure 9). Max load calculations show that the key and coupler have adequate safety factors of 2.5 and 4 respectively in the case of shear failure.
Because the bicycle hub is typically supported on both sides, calculations were performed to determine the safety of supporting the hub’s axle in the cantilevered position. The cantilevered axle was examined in worst-case static and dynamic loading conditions and found to have acceptable safety factors with respect to plastic deformation of 3.5 for the likely worst case and 2 for an unlikely dynamic impact load case. The modified hub is easily mounted to the wheelchair’s existing brackets in the safe cantilevered position. In order to reduce the overall wheelchair width, new mounting brackets were machined from lightweight aluminum.
A new hand-wheel was designed in order to drive the wheel by means of the geared hub (See Figure 3, 5). Before, the handrail was connected directly to the wheel’s rim in a constant direct drive mode of operation. The new hand-wheel design attaches to the hub where a bicycle sprocket would normally be located. The hand-wheels were manufactured from a 1/4 inch thick sheet of polycarbonate. Comparing materials showed that polycarbonate was the best option due to its strength, low weight, durability, and environmental resistance. Using a solid disk also protects the user’s fingers from the spokes which will be moving at a different speed than the handrail when the wheelchair is not in direct drive. The handrail, taken from the original wheelchair wheel, is connected to the circular polycarbonate by stainless steel bolts and nylon spacers. To transmit
3
TORQUE-ASSIST WHEELCHAIR
torque to the hub the polycarbonate is bolted between two aluminum plates, and the assembly is press-fit and pinned directly to the geared hub (See Figure 6). Finite element analysis under max load conditions and physical testing proved that the hand-wheel can withstand extreme loading scenarios in both the lateral and torsional directions.
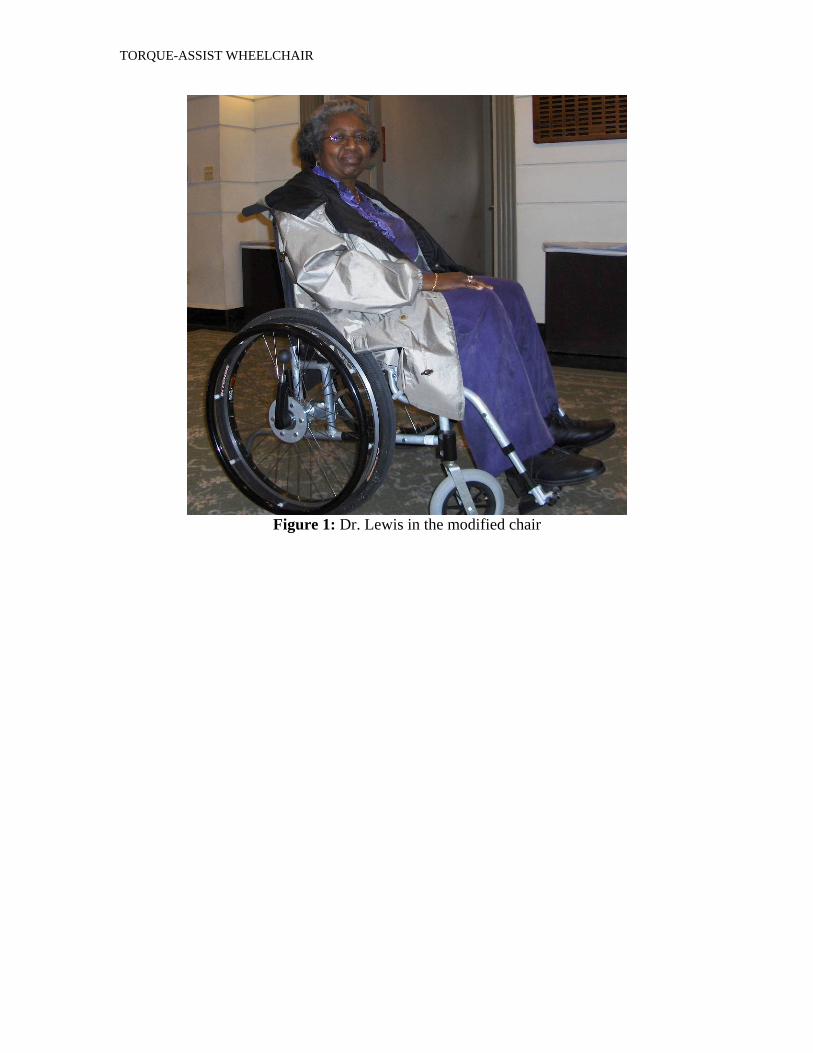
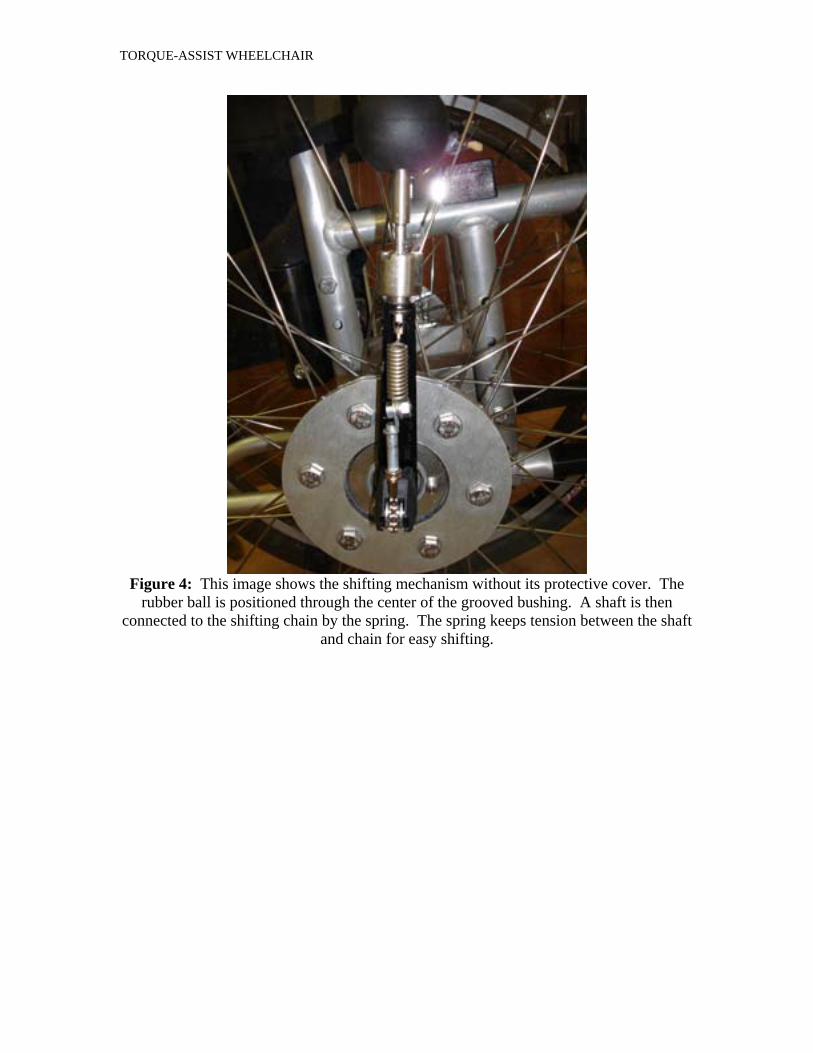
The wheelchair shifter is designed to change between the 1:1 and torque-assisting 1.33:1 gears by moving the hub’s internal coupler. The shifter is mounted directly to the hub to eliminate the use of exposed cables that could potentially snag or stretch (See Figure 2). The shifter uses an existing Sturmey-Archer bracket that supports a slotted bushing and shaft (See Figure 4). The bushing and shaft are manufactured from stainless steel for long-term use and environmental resistance. Two slots are machined into the bushing, each at different depths. The deep slot is for the 1:1 position and the shallow slot is for the 1.33:1 position. A roll-pin through the handle’s shaft rests in one of these grooves. To shift gears, the user will pull the handle up, turn it 90o and set the pin back down in the other slot. Calculations show that the roll pins, the weakest component of the shifter, can bear up to 600 pounds of shearing force. EVALUATION
Dr. Lewis was immediately impressed by the construction quality of the new torque-assist wheelchair. All the external components were made from polycarbonate, aluminum, or stainless steel in order to withstand any abuse from the user, provide corrosion resistance, and ensure longevity of the wheelchair. Overall, the new wheel modules and additional components added only 14 pounds of weight to the wheelchair. The internal hub modifications including the key and coupler were machined to tight tolerances in order to mesh with the existing gearing of the hub.
During testing, Dr. Lewis quickly felt the reduction in physical exertion needed when using the torque-assist gear of the new wheelchair. When the hub is in 1:1, the wheelchair operates as a normal standard wheelchair. When shifted to the 1.33:1 gear, the user requires 25% less input torque to move the chair. This assistance is equivalent to making a difficult 6.3 degree incline require the same effort as an ADA approved 4.8 degree ramp. Dr. Lewis compared the direct drive and torque-assist modes on both a flat and ramped area in her office building. She found that using the torque-assist gearing required significantly less effort to climb the ramp. As an unintended consequence of the new wheel modules, she discovered the new wheelchair to be much quicker than her old one. With less force, the new wheelchair coasted smoother, and longer due to the high quality bicycle bearings used in the hub. Therefore, Dr. Lewis also benefits when using the direct drive, which allows her to move faster on any surface.
Dr. Lewis required only a small amount of time to examine the shifting mechanism and practice with it to understand how it works and to be able to shift easily. The shifter only needs to be lifted a fraction of an inch and rotated in either direction. During rotation, the user can feel the roll pins slip into the next groove. Dr. Lewis especially liked the “comfort grip” rubber ball on the end of the shifter. The rubber ball allowed her to quickly locate the shifting mechanism and obtain a secure grip while changing gears.
The complete material list with quantities and costs is found in Table 1. The material portion of the prototype totaled $499.30. The time necessary to manufacture and assemble the new wheelchair modules was estimated to be 38 man hours once the processes were fine-tuned. A break down of this time shows that it took 11 hours to machine the keys and couplers, 3 hours for heat treatment, and 1 hour to assemble the two hubs. Additionally, it took 7 hours to mill the new mounting brackets, 11 hours to make the hand-wheel, 4 hours to machine the shifter, and 1 hour of assembly. If the team was a non-profit company and assuming a cost of $15 per hour for skilled
4

TORQUE-ASSIST WHEELCHAIR
labor and an increase for overhead, the torque-assist wheel modules could be priced at approximately $762 before profit and $1420 retail.
DISCUSSION In the short-term, Dr. Lewis proved that the torque-assist wheelchair is useful for easier travel in workday situations. Before, Dr. Lewis relied on the university’s cab service for transport to meetings and other buildings. The hope is that with enough use of the torque-assist wheels, Dr. Lewis will gain enough confidence to do the majority of campus traveling in her own wheelchair. The long term intention, of course, is to keep Dr. Lewis in a manual wheelchair as long as possible.
The 25% user supplied torque decrease provides sufficient assistance for the university work environment. Gear arrangements with more torque would require additional rotations of the hand-wheel, a possible nuisance, to travel the same distance. Dr. Lewis also observed an improvement in control while descending a ramp in the geared setting because the wheels turn at a slower rate. The torque increase works to assist with climbing as well as stopping or controlling decent.
The torque-assist wheelchair was developed primarily for Dr. Lewis on an individual basis. The new wheelchair was also designed with transferability in mind through ease of assembly and manufacturing and could be produced on a larger scale. Dr. Lewis has seen countless wheelchairs during her physical therapy sessions, but has seen nothing like the torque-assist wheels the team designed. Specifically, the rubber-ball shifter and polycarbonate hand-wheel are unique to competitive designs. Dr. Lewis likes the hand-wheels because they are extended from the wheels in a more comfortable position for her reach. The solid polycarbonate construction provides the primary safety feature which protects the fingers from the turning spokes of the wheel.
Only Dr. Lewis’ long term use of the torque-assist wheelchair will dictate if significant productivity gains are made in the workplace. The bicycle hub is built to last thousands of miles, and the superior bearings alone allow easier travel over Ohio University’s many brick pathways. Combined with the gear system, the overall modifications to the wheelchair improve its ability to conquer diverse terrain and inclines, a critical step towards maintaining independence in the workplace for Dr. Lewis. REFERENCES AND ACKNOWLEDMENTS 1. “Disability Statistics.” Cornucopia of Disability Information. University of Buffalo School of
Public Health and Health Professions. 14 Nov. 2007 <http://codi.buffalo.edu/graph_based/.demographics/.statistics.htm>.
2. "Wheelchair Views & Reviews." Wheelchair Reviews: USA TechGuide. 2004. United Spinal Association. 15 Oct. 2007 <http://www.usatechguide.org/reviews.php>.
3. “Magicwheels.” 2007. Magicwheels 2-gear Wheelchair Drive. 16 Oct. 2007. <http://magicwheels.com/gallery/index.htm>.
4. Alexander, Tracey S. “Wheelchair.” U.S Patent 5184837. February 9, 1993. 5. “Hub.” Sturmey Archer. 17 Jan. 2008. < http://www.sturmey-archer.com/hubs.php>. Thank you to Dr. Carolyn Lewis for all her patience and support. Thank you to Dr. Kremer and Dr. Urieli for their engineering guidance. Thank you to Vincent Pelose for donating three wheelchairs to the project (Access To Independence - Ravenna, Ohio). Primary Author: Austin Seigneur, 223 Cherry Hill Dr., Wadsworth, OH 44281, [email protected]
5

TOQUE-ASSIST WHEELCHAIR Graphic Attachment
Team SCSG, Ohio University – Mechanical Engineering June 9, 2008
Shane M. Bickmeier, Jason D. Denhart, James T. Erkard III, Melissa R. Feigi Brian A. Kaufman, Evan W. Koontz, Austin M. Seigneur, Bryan T. Russell
Interview with Dr. Lewis: http://www.youtube.com/watch?v=snWse4hpGo4 Dr. Lewis in motion on flat ground: http://youtube.com/watch?v=_B1Vsol6WFw
Table 1. Material List and Costs Material & Parts Quantity Cost per Item Final Cost
3-Speed Hub 2 $75.00 $150.00 Bike Rim 2 $35.99 $71.98 Spoke 14 Ga. 72 $0.75 $54.00 Spoke Nipple 72 $0.10 $7.20 Innertube 2 $19.99 $39.98 Labor to Build Wheel 2 $25.00 $50.00 Heat Treatable Key Stock 1.1 in. $2.31 $0.20 Aluminum 6061 9.5 in. $17.74 $13.83 Aluminum 7075 10.0 in. $19.58 $19.58 Steel Slotted Body Rivet Nut 16 $0.52 $8.37 Polycarbonate Sheet 42.0 in. $57.78 $50.56 Truss Head Phillips Machine Screw 16 $0.28 $4.47 304 Stainless Steel Rod 2.7 in $14.96 $3.37 416 Stainless Steel Rod 6.6 in. $18.42 $10.16 Comfort Grip Ball Knob 2 $1.94 $3.88 4140 Alloy Steel Rod 2.0 in. $21.91 $3.65 302 Ultra-precision Ext. Spring 2 $4.03 $8.07 Total: $499.30
TORQUE-ASSIST WHEELCHAIR
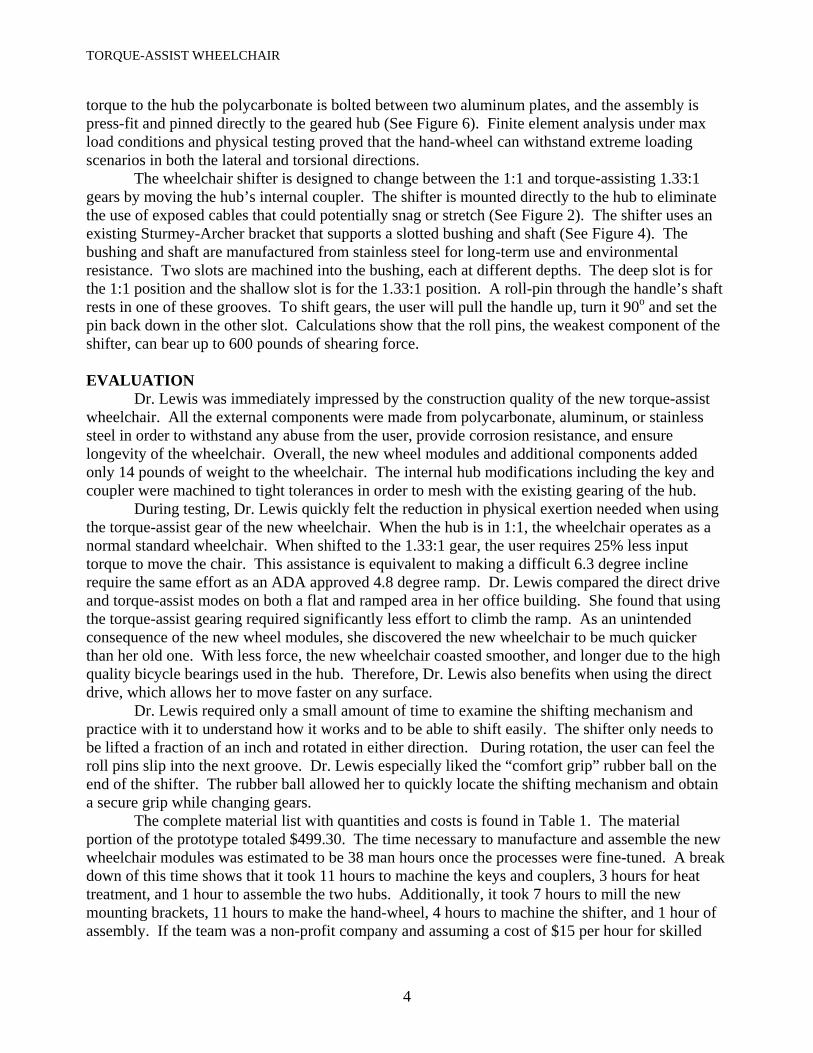
Figure 1: Dr. Lewis in the modified chair

TORQUE-ASSIST WHEELCHAIR
Figure 2: A front view of the gearing mechanism. The rubber ball is used to shift the
gears. The black, plastic cover protects the internal mechanisms of the shifter. The cylindrical bike hub can be seen in the center of the bike tire. It is attached by spokes woven through external flanges. In the center of the hand-wheel assembly are the two
metal plates that bolt the hand-wheel to the hub.

TORQUE-ASSIST WHEELCHAIR
Figure 3: A side view of the complete gearing mechanism including the tire, the hub, the hand-wheel and the shifter. The clear, polycarbonate disk can be seen from this angle between the tire and handrail. White, nylon spacers surround the bolts that connect the
handrail to the polycarbonate disk.
TORQUE-ASSIST WHEELCHAIR
Figure 4: This image shows the shifting mechanism without its protective cover. The
rubber ball is positioned through the center of the grooved bushing. A shaft is then connected to the shifting chain by the spring. The spring keeps tension between the shaft
and chain for easy shifting.

TORQUE-ASSIST WHEELCHAIR
Figure 5: This is a 3-D computer model of the device shown in Figures 2 and 3. The
polycarbonate is colored red to be seen more easily.

TORQUE-ASSIST WHEELCHAIR
Figure 6: This shows an exploded view of the computer modeled shifter, hand-wheel and
geared hub shown in Figure 5.
TORQUE-ASSIST WHEELCHAIR
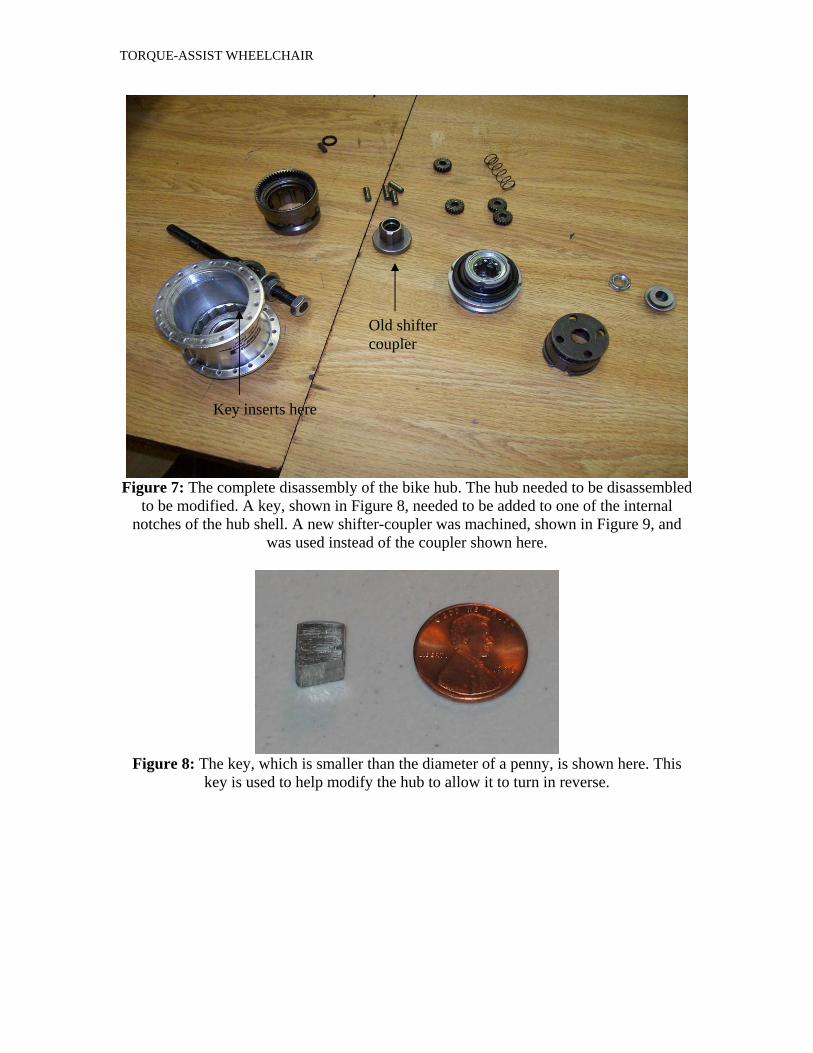
Key inserts here
Old shifter coupler
Figure 7: The complete disassembly of the bike hub. The hub needed to be disassembled
to be modified. A key, shown in Figure 8, needed to be added to one of the internal notches of the hub shell. A new shifter-coupler was machined, shown in Figure 9, and
was used instead of the coupler shown here.
Figure 8: The key, which is smaller than the diameter of a penny, is shown here. This
key is used to help modify the hub to allow it to turn in reverse.
TORQUE-ASSIST WHEELCHAIR
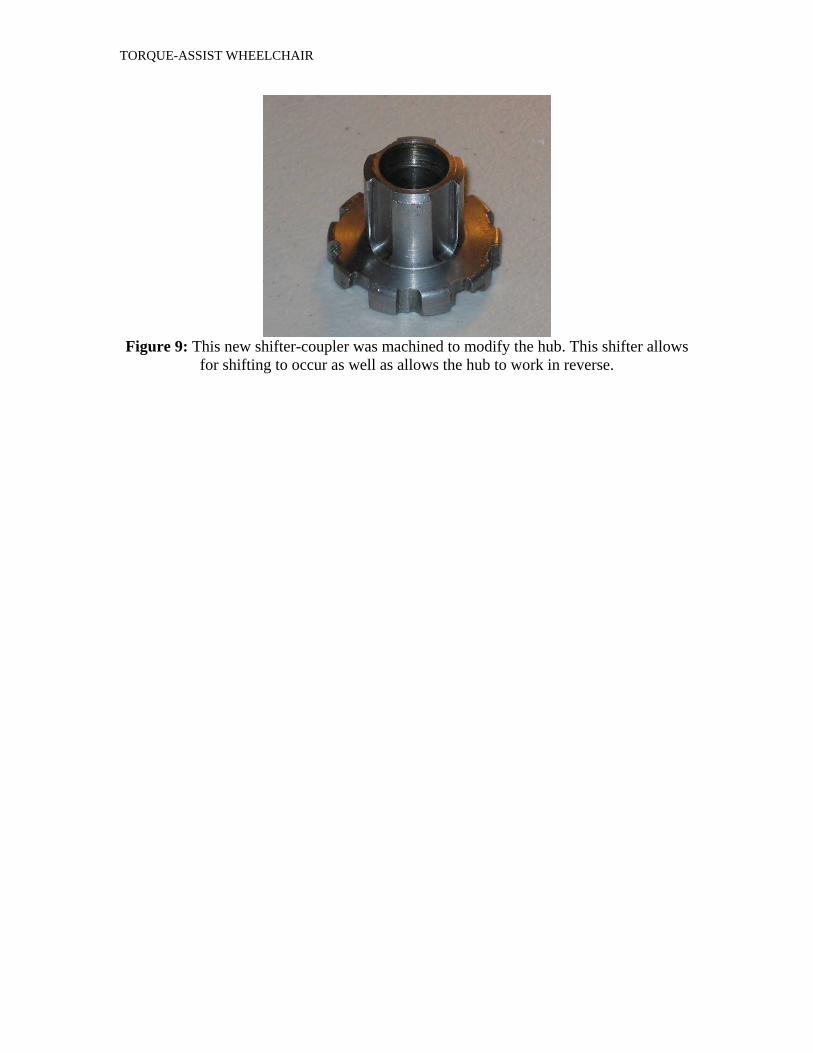
Figure 9: This new shifter-coupler was machined to modify the hub. This shifter allows
for shifting to occur as well as allows the hub to work in reverse.