Embed Size (px)
Citation preview


Abstract
This thesis investigates the load control of a marine current energy converterusing a vertical axis turbine mounted on a permanent magnet synchronousgenerator. The purpose of this thesis is to show the work done in the so farrelatively uncharted territory of control systems for hydro kinetic energy con-version. The work is in its early stage and is meant to serve as a guide forfuture development of the control system.
An experimental power station has been deployed and the first results arepresented.
A comparison between three load control methods has been made; a fixedAC load, a fixed pulse width modulated DC load and a DC bus voltage controlof a DC load. Experimental results show that the DC bus voltage control re-duces the variation of rotational speed with a factor of 3.5. For all three cases,the tip speed ratio of the turbine can be kept close to the expected optimaltip speed ratio. However, for all three cases the average extracted power wassignificantly lower than the average power available in the turbine times theestimated maximum power coefficient. A maximum power point tracking sys-tem, with or without water velocity measurement, should increase the averageextracted power.
A simulation model has been validated using experimental data. The sim-ulated system consists of the electrical system and a hydrodynamic vortexmodel for the turbine. Experiments of no load operation were conducted tocalibrate the drag losses of the turbine. Simulations were able to predict thebehaviour in a step response for a change in tip speed ratio when the turbinewas operated close to optimal tip speed ratio. The start position of the turbinewas varied in the simulation to view the influence on the step response from achanged turbine position relative to the direction of the water flow.

To Lucie and Maël


List of papers
This thesis is based on the following papers, which are referred to in the textby their Roman numerals.
I S. Lundin, J. Forslund, N. Carpman, M. Grabbe, K. Yuen,S. Apelfröjd, A. Goude, M. Leijon."The Söderfors Project: Experimental Hydrokinetic Power StationDeployment and First Results". Proceedings of the 10th EuropeanWave and Tidal Energy Conference Series, September 2-5 2013,Aalborg, Denmark. (Reviewed conference paper)
II J. Forslund, S. Lundin, K. Thomas, M. Leijon."Experimental results of a DC bus voltage level control for a loadcontrolled Marine Current Energy Converter". Energies, 8(5),4572-4586, May 2015.
III J. Forslund, A. Goude, S. Lundin, K. Thomas, M. Leijon."Validation of a Coupled Electrical and Hydrodynamic SimulationModel For Vertical Axis Marine Current Energy Converters".In manuscript.
Reprints were made with permission from the publishers.


Contents
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131.1 Electrical layout and control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.2 Research objective . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.3 Marine Current Power at Uppsala University . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.4 Thesis outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 Theory and system overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1 The Söderfors experimental station . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2 Permanent Magnet Synchronous Generator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3 Vertical Axis Turbine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.4 Load Control in Marine Current Power applications . . . . . . . . . . . . . . . . . . . 202.5 PID Control and step response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.6 Electrical system overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.6.1 Load Control System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3 Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.1 ADCP measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 AC load control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 DC load control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.4 Electrical Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4 Results and Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.1 ADCP measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.1.1 Water speed measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.1.2 Water speed measurements for determining
correction factor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 294.1.3 Water speed for the AC and DC load cases . . . . . . . . . . . . . . . . . . . 30
4.2 AC load control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3 DC load control vs AC load . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3.1 Rotational speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 314.3.2 Current measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.4 Calibration of the simulation model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.5 Simulation results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6 Future work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7 Summary of papers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44

8 Sammanfattning på svenska . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51

Nomenclature
A [m2] Area of turbine cross sectionBmax [T] Maximum magnetic flux density
C - Fraction of upstream and downstream water speedc - Correction factor for water speed
CP - Power coefficientCPmax - Maximum power coefficient (at λopt )E(s) - Error of a P controller on Laplace formEi [V] Generator voltagef [Hz] Electrical frequency
I, i [A] CurrentiRMSphase [A] RMS current in one phase of the generator
J [kgm2] InertiaKP - Proportional constant for P controllerKd - Derivative constant for P controllerKi - Integral constant for P controllerN - Number of turns in the generator windingn [RPM] rotational speel in RPM
Ntot - Number of measurementsp - Number of polesP [W] Power
Pkinetic [W] Power across turbine cross sectionPturbine [W] Power absorbed by the turbinePload [W] Power absorbed in the loadPlosses [W] Power dissipated in the transmission line and
generator windingPCopper [W] Resistive power losses in the generator
q - Element of integralr [m] Turbine radiusR [Ω] Resistance
Rload [Ω] Resistance of loadRlines [Ω] Resistance of transmission lines
Rwindings [Ω] Resistance of generator windings

T [Nm] TorqueTg [Nm] Generator torqueTe [Nm] Electric torquev [m/s] Water speedvq - Element q of water speed measurement
vturbine - [m/s] Water speed at turbinevupstream [m/s] Water speed at upstream ADCP
vdownstream [m/s] Water speed at downstream ADCPY (s) - Output of a P controller on Laplace form
ηsystem - System efficiency defined as < Pturbine > / < Pkinetic >λ , TSR - tip speed ratio
λopt - optimal Tip Speed Ratioρ kg/m3 Densityω [rad/s] Rotational speed of turbine/generator
Abbreviations
AC Alternating CurrentADCP Acoustic Doppler Current ProfilerDC Direct CurrentFPGA Field-Programmable Gate ArrayIGBT Insulated Gate Bipolar TransistorMPPT Maximum Power Point TrackingPMSG Permanent Magnet Synchronous GeneratorPWM Pulse Width ModulationRMS Root Mean SquareRPM Revolutions Per MinuteTSR Tip Speed RatioVAT Vertical Axis TurbineVAWT Vertical Axis Wind Turbine



1. Introduction
Marine Current Power with a Vertical Axis Turbine (VAT) is a fairly new anduntested concept in renewable energy. It utilizes the kinetic energy in free-flowing water and converts it into electrical energy. This thesis shows therecent work done at Uppsala University. Hopefully this will open up moreoptions for placing an in-stream energy converter, that has less environmentalimpact on its surroundings than a traditional hydropower dam. The chosendesign of a VAT with a Permanent Magnet Synchronous Generator (PMSG)has many similarities of that of a Vertical Axis Wind Turbines (VAWT) witha PMSG in wind power. A study made from 1997 showed that most of thedowntime in wind power failures are due to the gearbox [1]. A solution thatis becoming more popular is a direct drive variable-speed system that has nogearbox between the turbine shaft and the generator shaft. This will make thesystem more robust but the generator must be designed to be efficient at lowspeeds. For wind power, there is alot of research done for both VAWTs [2–4]and horizontal axis wind turbines [5–7]. A comparison of the two is shownin [8]. However, there is much to explore for in-stream VATs. Even thoughthe similarities are many, there are a number of significant differences.
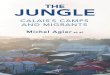
Figure 1.1 shows typical water and wind speed measurements during 45 sec-onds. There is clearly a difference in characteristics between the two; in par-ticular, the highest and lowest values obtained during the relatively short timespan differ more for wind speed than for water speed. For a direct drive sys-tem under these conditions, the difference in power absorption (and outputvoltage) between the high and the low velocity would be even bigger for windpower. This would suggest that the design of a control system for a marinecurrent power converter would be different from that of wind power converter,which in turn indicates the need for research on control systems for marinecurrent applications.
13

Time [s]0 5 10 15 20 25 30 35 40
1.3
1.4
1.5
1.6
0 5 10 15 20 25 30 35 40 45
7
6
5
4
3
Time [s]
Wat
er s
peed
[m/s
]W
ind
spee
d [m
/s]
(a)
(b)
Figure 1.1. A: Water velocity upstream of the Söderfors turbine on 2014-04-16. B:Wind speed measurement taken from p. 53 of [9].
1.1 Electrical layout and controlSince the choice of a VAT with a PMSG is similar to that of a VAWT with aPMSG for wind power, the electrical systems share the same basic topology.The control system is typically operated by rectifying the generator voltageand controlling the rotational speed of the turbine by switching the DirectCurrent (DC) bus voltage, see figure 1.2. The DC bus is connected to thegrid side power electronics that converts the DC voltage to grid voltage andfrequency using an inverter, a filter and a transformer. The author’s work isfocused on the control side.
GridGeneratorTurbine
Rectifier Inverter TransformerDC bus Filter
Control side Grid side
Switch
Figure 1.2. The control side and the grid side connected using the DC bus.
To optimize the energy capture one can use Maximum Power Point Track-ing (MPPT). There is not much published in the area of control methods forVAT with PMSG in marine currents, but it has been a popular field of researchthe last two decades in wind power. Once the turbine has reached the nominaloperation region, there are a few different ways of trying to achieve MPPTand different components are required depending on the application. In windpower it is common to use a DC/DC converter or a tap-transformer [10–12].Control of a VAWT with PMSG using tip speed ratio control (tip speed ratio isexplained in section 2.3) is suggested in [13] and [14]. A method for finding
14

the optimal operation point without wind speed measurement or turbine pa-rameters is presented in [15]. Using the rotational speed of the turbine as windspeed measurement is suggested in [16]. Combining MPPT and tip speed ratiocontrol is presented in [17]. A novel way of using MPPT for tidal power isproposed in [18] and an electric system for grid connection is proposed in [19].
1.2 Research objectiveThe area of interest for the author is the control and optimization of power ab-sorption of a marine current energy converter. The goal is to design a controlsystem for marine current application. The work thus far includes the deploy-ment described in paper I, the first results of the implemented control systemin paper II and validation of a simulation model that combines a hydrodynamicmodel of the turbine with an electrical model of the system in paper III. Thework will serve as a guide for the continued work of more complex controlsystems and for creating an autonomous power station.
1.3 Marine Current Power at Uppsala UniversityIn 2001 the Division of Electricity at the Department of Engineering Sciencesin Uppsala University started investigating hydro-kinetic energy conversion,also called marine current power. One prototype generator has been builtand tested in a lab environment, and an experimental station was deployedin Söderfors during 2013 that features an improved generator prototype, a tur-bine and an electrical system. Acoustic Doppled Current Profilers (ADCPs)were also deployed in the river for measuring water speeds. The research ofthe group has included hydrodynamic models, investigation of the marine cur-rent resource, developing a low speed generator design and electrical system.The research has resulted in 6 PhD theses [20–25].
1.4 Thesis outlineChapter 2 presents the theoretical foundations of the research carried out inthis thesis. It also describes the experimental station and its electrical layout.Chapter 3 describes the conducted experiments and chapter 4 shows and dis-cusses the experimental results. Chapter 6 outlines the work of the PhD thesisto come. Chapter 7 summarizes the three papers in this thesis and chapter 8summarizes the thesis in Swedish.
15


2. Theory and system overview
This section describes the theoretical background and provides an overview ofthe system. Chapter 2.1 describes the experimental station. Chapter 2.2 brieflydescribes the generator. Chapter 2.3 concerns the turbine design. Chapter 2.4explains how control theory is applied to VATs with PMSGs in marine currentapplications. Chapter 2.5 describes PID controllers and step repsonse. Chapter2.6 describes the electrical system.
2.1 The Söderfors experimental stationThe experimental station comprises two ADCPs, a turbine and generator placedat a depth of 7 m, and a measurement cabin containing control and measure-ment systems. The turbine and generator are placed approximately 800 mdownstream of a conventional hydro power plant, and the ADCPs are placedabout 15 m upstream and 15 m downstream of the turbine, see figure 2.1.There is an electrical enclosure on the bridge where the cables from the gen-erator and the ADCPs are forwarded to the measuring station on shore.
The experimental station is fully described in [26, 27].
Figure 2.1. Overview of the experimental station in Söderfors.
17

2.2 Permanent Magnet Synchronous GeneratorThe prototype generator is a PMSG that uses permanent magnets to electri-cally excite the rotor. The generator voltage, Ei, depends on the amplitude ofthe magnetic flux density, Bmax, the electrical frequency, f , and the number ofturns in the winding, N,
Ei ∼ Bmax f N. (2.1)
The generator is a three phase machine, i.e. it has three phases 120 electricaldegrees apart. The electrical frequency depends on the rotational speed, n, andthe number of poles, p, as
f =p2
n60
. (2.2)
The rotational speed of the prototype generator at nominal operation will belower than that of a typical generator for hydropower or wind power becauseof the low speed of the water currents. By increasing the number of poles theoutput voltage is increased and a higher efficiency can be obtained.
The losses in the generator are divided into copper losses and iron losses.The copper losses are mainly resistive losses in the windings that dissipate asheat and depend on the resistance and the current according to
PCopper = RI2. (2.3)
Not only do the copper losses reduce the efficiency of the generator, theyalso pose a problem of where and how to remove the heat that can put con-straints on the capacity of maximum power delivered by the generator. Thecopper losses can be reduced by reducing the resistance of the windings.
The iron losses are divided into eddy current, hysteresis and excess dynamiclosses. They are not dependent on the power delivered by the generator, buton the layout of the generator and the electrical frequency. Iron losses are notincluded in any of the papers since at the rotational speeds used in the papersthe copper losses are assumed to dominate the generator losses.
Power for a rotating body is P = ωT where T is torque. When the gen-erator and turbine are rotating the difference between torque delivered to thegeneretor, Tg, minus the electric torque, Te will determine the acceleration ofthe rotor, ω , written as
dω
dtJ = Tg −Te (2.4)
where J is the inertia. The electrical torque can be controlled by control-ling the size of the load, hence determining the acceleration and the rotationalspeed of the turbine. The generator is a directly driven permanent magnetsynchronous generator. Nominal operation is at water speed 1.3 m/s and the
18

specifications for the generator can be found in table 2.1. A detailed descrip-tion of the generator and its losses can be found in [28]. The generator isconnected to the measurement cabin on shore by a three phase power cable∼200 m long with a resistance of 0.1 Ω/phase. A description of the generatorlosses and how it interacts with a VAT is desribed in [22, 25] and PMSGs forwind power applications is described in [9, 29, 30].
Table 2.1. Generator specifications at nominal operationGenerator specification Value UnitMechanical rotational speed 15 RPMElectrical frequency 14 HzPoles 112Line-to-line rms voltage 138 VStator rms current 31 APower rating 7.5 kWStator phase resistance 0.335 Ω
Armature inductance 3.5 mHFlux linkage 1.28 VsEstimated inertia 2445 kgm2
2.3 Vertical Axis TurbineThe power in free-flowing water of cross section A is
Pkinetic =12
Aρv3, (2.5)
where v is water speed and ρ is density of water. The fraction of powerdelivered to the generator from the turbine is called power coefficient, CP,defined as
CP =Pturbine
Pkinetic. (2.6)
CP is a function of the Tip Speed Ratio, λ (or TSR) , i.e. the ratio of bladespeed to undisturbed water speed, defined as
λ =ωrv
(2.7)
where ω is the rotational speed of the turbine and r the turbine radius. Maxi-mum power absorption from the water, CPmax , occurs at some optimal tip speedratio λopt . A typical relation between CP and λ can be seen in figure 2.2.
19

Tip speed ratio (λ)
CP
Figure 2.2. Power coefficient, CP, as a function of tip speed ratio, λ .
The designed turbine has optimal tip speed ratio λopt = 3.5 for a powercoefficient of CPmax = 0.36. The turbine has five vertical blades with fixedpitch and a NACA0021 profile, it is 3.5 m high, it has a radius of 3 m and achord length of 0.18 m. For more detailed information on power absorptionof turbines, see [31]. Turbines in a channel using a streamtube model arediscussed in [32].
2.4 Load Control in Marine Current Power applicationsThe mechanical power Pturbine delivered to the generator by the turbine shaftis converted to electricity. It is dissipated in the load, and as losses in thegenerator windings and the transmission lines. At steady-state it can be writtenas
Pturbine ∼ Plosses +Pload (2.8)
(see [33]). Combining equations (2.5), (2.6) and (2.8) we see that
12
CPρAv3 ∼ Plosses +Pload , (2.9)
and since CP = CP(λ ), one can control the rotational speed of the turbineby varying the load. This way the system can be kept at λopt and the highestamount of energy from the water can be extracted.
Defining the system efficiency ηsystem as average electric power deliveredto the generator over average power available in the water as,
ηsystem =< Pturbine >
< Pkinetic >. (2.10)
20

This means that the average power absorption will be dependent on theability of the control system to keep the rotational speed over time at the speedcorresponding to λopt .
2.5 PID Control and step responseTo control a process that is not only controlled by the defined input, but also af-fected by its surroundings, one can use Proportional-Integral-Derivative (PID)control. It is a feed-back control loop that is commonly used throughout var-ious industry processess. The PID controller can be written using Laplacetransform as
Y (s) =(
KP +Ki
s+Kds
)E(s) (2.11)
where Y(s) is the output, KP is the proportional gain, Ki is the integralgain, Kd is the derivative gain and E(s) is the error between output and aset reference value. You can display the controller and its defined inputs andoutputs in a block diagram as in figure 2.3.
Reference valueError
Measured value
ProcessKP
Ki
Kd
+
-
+
++∑ ∑
Figure 2.3. Block diagram of a PID controller.
The purpose of the constants are to minimize the error, often as quickly aspossible, and to make sure it reaches the set point with as little overshoot, con-stant error and oscillations as possible. The proportional term KP is multipliedwith the error and determines how fast the system will react to the currenterror. A too high KP can result in oscillations and leave a constant error thecontroller is unable to remove. The integral part, Ki, takes into account boththe size of the error and the duration of the error. The purpose of Ki to pre-vent the constant error left over by KP. A too high value of Ki may resultin an overshoot (the output passes the reference value). The derivative part,Kd , takes the size of the error and the slope of the error into account. Kd canreduce the rise time but is sensitive to high frequencies and noise, and is there-fore often accompanied by a low pass filter. A step response can be used to testthe constants of a PID controller where the overshoot, constant error, responsetime and oscillations will be visible, see figure 2.4.
21

Constant error
OvershootOscillations
Rise time
Figure 2.4. The characteristics of a step response.
2.6 Electrical system overviewThe only equipment inside the generator housing are Hall sensors for detectingrotational speed and a camera powered by LED lights, see figure 2.5a. Allother electrical measurements are made inside the measurement cabin.
Figure 2.5. (a) The Hall sensors inside the generator as seen by the camera.(b) The electrical enclosure.
An enclosure containing all electrical components, called the main enclo-sure, is located in the measurement cabin, see figure 2.5b. The entire systemis controlled by LabView using a CompactRIO and Field-Programmable GateArray (FPGA). An overview of the electrical system is shown in figure 2.6.
When the generator is kept at stand still, it is short circuited in the bridgeenclosure using the bridge parking brake. The resistance in the 50 m cablesfrom the generator is a big enough electrical load to keep the generator fromself-starting. For redundancy, there is also a short circuit in the main enclosure,
22

Grid
Generator
Turbine
Parkingpbrakemain
enclosure
Emergencypbrake ACpLoad
DCpLoad
Rectifier InverterTransformer Startuppcircuit
Operationpcircuit
Softpstartp
Parkingpbrakebridge
enclosure
~50pmpcable ~150pmpcable
Figure 2.6. Overview of the electrical system in the experimental station.
called the main enclosure parking brake. To start up the system both shortcircuits must be manually disconnected.
The generator windings double as a startup circuit. Three-phase power isdrawn from the grid, rectified and connected to the generator directly from thethree-phase inverter. At the same time, power is also drawn from the grid tothe soft start that charges the capacitor bank for the DC load. The contactors inthe enclosure are used for connecting the load once sufficient rotational speedhas been reached. There is an emergency brake consisting of low resistance,high power resistors that can be connected both using LabView and manuallyin case the regular load is unsufficient.
Manual switches are used (prior to startup) to connect a fixed resistive loadeither in an Alternating Current (AC) three-phase Wye formation or a DCconnection.
Further details about the control and measurement system can be foundin [34].
2.6.1 Load Control SystemThe AC load comprises no active control during load operation. Once theswitch from the startup circuit to AC load has been made, the generator isconnected directly to fixed resistive AC load.
The DC load control comprises the resistive load, a rectifier with a capaci-tor bank, voltage measurement on the rectifier and an Insulated Gate BipolarTransistor (IGBT) with a snubber circuit in parallel (see figure 2.7).
23

Gen
Capacitorbank
Snubber IGBT
AC iAC
DCi
VDC
VDC,Target
Rectifier
Load
Figure 2.7. The DC load control consisting of a rectifier, capacitor bank, IGBT withsnubber circuit and resistive load.
The DC load operation uses the FPGA module of the CompactRIO to con-trol the switching frequency of the IGBT. Two control algorithms have beenimplemented for DC load control: Constant duty cycle and Target DC volt-age. The Constant duty cycle is an open loop controller where the user setsa desired duty cycle, thus it has no feedback control. The Target DC voltageaims to keep the DC bus voltage within a set range using a P-controller loopthat uses the error of measured DC bus voltage minus a target DC bus voltagereference as input, see figure 2.8. The loop has three states depending on thesize of the error. If the error is negative, the duty cycle is set to 0 %, i.e. noload operation (or free spin operation). If the error is more than 5 Volts theduty cycle is set to 100 %, i.e. full load operation. In between 0 V and 5 V theloop enforces a linear relationship between error and duty cycle. The controlsystem is described in more detail in paper II.
Process+-Error handlingKP
Figure 2.8. P-controller loop of the DC bus voltage.
24

3. Method
This section presents the methods used in the thesis. Section 3.1 describes thewater speed measurements and sections 3.2 and 3.3 describe the AC load andDC load experiments respectively. The electrical model is described in 3.4.
Three methods for load control have been implemented and are referred toas follows: The AC load control case is the "AC case", the fixed Pulse WidthModulated (PWM) DC load control is the "fixed PWM" case and the TargetDC voltage control is the "constant DC" case. For both papers the lossesare assumed to be purely resistive and limited to the transmission lines andgenerator windings. All average powers are calculated with
P =1
Ntot
Ntot
∑q=1
R i2q. (3.1)
where R is resistance and i is current.
3.1 ADCP measurementsThe cross section of the river at the upstream and the downstream devices dif-fers, i.e. if the discharge is the same at both points the velocity of the waterwill be different. Paper II makes an estimate of the velocity at the turbine, v, byassuming that the turbine is located exactly between the upstream and down-stream ADCPs and that the change in cross section is linear so the averagevalue of the fraction of the upstream and downstream device can be written,
C =vupstream
vdownstream. (3.2)
The average value of C can be used to find a correction factor, c, so that thevelocity of the water at the turbine can be written as
vturbine = c vupstream. (3.3)
The average power at the turbine can be calculated as
< Pkinetic >=1
Ntot
Ntot
∑q=1
12
Aρv3q. (3.4)
25

The ADCPs devices are Workhorse Sentinel 1200 Hz with an accuracyof 0.3 % of the water speed. Measurements are taken minimum every 3.6
seconds (set by user) and give a velocity profile from one meter above the bot-tom of the river to one meter below the surface. It does not make a differenceif the downstream or the upstream values are used, in paper II it was decidedto use the upstream values for all measurements of vturbine. In Paper III, thespeed of the water at the upstream ADCP was assumed to be constant untilreaching the turbine. An average value of the water speed in the intervall ofinterest was used to determine the average time it took for the water to reachthe turbine.
3.2 AC load controlIn paper I, resistive AC loads of 2.0 Ω and 2.5 Ω are connected in Wye-formation. The following was measured during load operation: current andline-to-neutral voltages in the load, water speed from the upstream and down-stream ADCPs and rotational speed of the turbine. From that we can calculatethe average power consumed by the load and the average tip speed ratio.
3.3 DC load controlPaper II aims to compare the two DC load controls with the fixed AC loadcontrol.
Each control strategy was evaluated by the variation in rotational speed,losses and the extracted electric power. An average value of the upstreamADCP water speed measurement was used to calculate the average power ab-sorbed by the turbine. The variation of delivered of power to the DC bus wasdetermined using equations 2.7 and 2.9 and the rotational speed. For each loadcase the average power consumed in the load, the transmission lines and thegenerator windings were calculated.
Symmetry between the generator voltages was assumed when calculatingthe AC power. λopt = 3.5 was used together with an average value of the watervelocity to determine at which rotational speed to switch over to load control.Data was recorded after a wake had been built up after the turbine.
For both of the DC control cases, a PWM frequency of 500 Hz was used.A duty cycle of 17 % was used in the fixed PWM case and in the constant DCcase the target DC voltage was set to 173.5 V and KP = 1.
26

3.4 Electrical ModelIn paper III a simulation model was developed that couples an electrical modelwith a hydrodynamic vortex model of the turbine. The purpose of developingsuch a tool is the ability to easily change parameters in the simulation thatare in reality either not so easily changed, or cannot be changed at all. Forexample, the water speed in the river is one parameter that we are not in controlof, but a parameter which we can choose as input in a simulation model.
The simulation tool Matlab SIMULINKTM was used for the simulation be-cause it can handle power electronic devices with fast switching rates. Therectifier, IGBT, capacitors, snubber and generator were simulated using thevalues of the components used in the experimental set-up. The drag losses ofthe turbine model are calibrated by letting the turbine spin freely so the turbineis accelerated by the water and slowed down by the losses until it reaches anequilibrium tip speed ratio. Comparing the experimental rotational speed withthe simulated rotational speed allows for the drag losses in the hydrodynamicmodel to be estimated. After the drag losses have been calibrated, the gener-ator model is calibrated by comparing the experimental and simulated gener-ator voltage. Once the model is calibrated, it is validated by evaluating stepresponses of a change in tip speed ratio. The turbine is controlled by settinga certain output voltage from the generator using the control system, and thensetting a new value for the target voltage. The set value will instantly changeand the time it takes for the turbine to reach the new target value reveals howaccurately the model can describe the system.
For every rotation of the turbine each blade has two peaks in generatedtorque, one upstream (bigger) and one downstream (smaller). The step re-sponse will be affected by the turbine position at the moment of the step. Ifthe target value is changed in between the peaks of torque it will slow downthe rise time of the step respone. For now, the position of the turbine beforea step can not be controlled in the experimental set-up but can be changed inthe simulation by changing the turbine starting position.
27


4. Results and Discussion
This section presents the results and discussions from papers I, II and III. Sec-tion 4.1 shows the results of the ADCP measurements for papers I and II.Section 4.2 shows the results of the AC load control for paper I and section4.3 shows the results of the comparison between AC load control and the twoDC load control methods in paper II. Section 4.4 shows the results from thesimulation calibration and section 4.5 shows the simulation results from paperIII.
4.1 ADCP measurements4.1.1 Water speed measurementsFor paper I, the mean values for water speed during an hour are plotted infigure 4.1. On average, the speed of the undisturbed flow was 1.14 m/s at theupsteam ADCP and 1.05 m/s at the downstream ADCP. During load operation,a significant decrease in the water speed at the downstream ADCP is distin-guishable. For the operational period beginning at 14:02, the average meanspeed downstream of the turbine was 0.71 m/s.
4.1.2 Water speed measurements for determiningcorrection factor
In paper II, one week of measurements of the water speed with frequency0.1 Hz from the upstream and downstream devices were recorded during theweek leading up to the AC and DC load experiments. The average value ofthe correction factor was Cmean = 1.090. Equation 3.3 gives c = 0.9587 andthe water speed at the turbine can now be estimated as v = 0.9587 vupstream.
29

13:30 13:45 14:00 14:15 14:300
0.5
1
1.5
Time of day
Wat
er s
peed
(m
/s)
UpstreamDownstream
Figure 4.1. Mean water speed measured by ADCP upstream (blue line) and down-stream (green line) of the turbine on 29 April 2013. The horizontal dashed lines showthe time-averaged mean speed for the undisturbed flow at the two locations. Theshaded areas indicate time periods during which the machine was operated.
4.1.3 Water speed for the AC and DC load casesTable 4.1 from paper II shows the average values of vupstream and vturbine for thethree load cases, measured with (1/3.6) Hz. The calculated average power atthe turbine was calculated using equation 3.4, vupstream, c = 0.9587, A = 21m2
and ρ=1000 kg/m3. The statistical analysis in the paper concludes that thevariance in each data set was the same. The average water velocity was higherfor the fixed PWM case than for the AC case, and for the other cases theaverage values were the same. These values were used in paper II togetherwith Pturbine to determine ηsystem for each load case, see section 4.3.
Table 4.1. Average velocity measured by the ADCP and calculated average poweracross the turbine at respective speed.
Load case AC Fixed PWM Constant DCvupstream (m/s) 1.394 1.406 1.399Variance (m/s) 0.005 0.005 0.005
Measurement points 601 501 502vturbine (m/s) 1.336 1.348 1.341
< Pkinetic > (kW) 27.44 28.15 27.78
30

4.2 AC load controlPaper I shows the results of Wye-connecting 2.0 Ω/phase and 2.5 Ω/phase. Asummary of measured and calculated values is shown in table 4.2.
Table 4.2. Measurement results from AC load controlParameter Value2.5 Ω load
Electrical frequency 11.8 HzMechanical frequency 12.7 RPM
Tip speed ratio 3.5Line-to-neutral voltage (RMS) 103 V
Current (RMS) 23.7 A2.0 Ω load
Electrical frequency 8.3 HzMechanical frequency 8.9 RPM
Tip speed ratio 2.5Line-to-neutral voltage (RMS) 68.2 V
Current (RMS) 19.5 A
4.3 DC load control vs AC loadThis section shows the comparison of the AC load, fixed PWM control and theconstant DC bus voltage control from paper II.
4.3.1 Rotational speedFigure 4.2 shows a histogram of the rotational speed and table 4.3 shows cal-culated average values, variances and the average λ . The average λ was de-termined for each load case using equation 2.7 together with the average rota-tional speed in Revolutions Per Minute (RPM) and the average water velocityat the turbine.
Table 4.3. Rotational speed of the turbine and number of measurements of the threeload cases. Calculated average λ from average water speed and average rotationalspeed, ω .
Load case AC Fixed PWM Constant DC< ω > 15.35 15.68 15.65
Variance 2.34 2.11 0.65< λ > 3.61 3.65 3.67
31

RPM12 14 16 18 20
400
300
200
100
0
400
300
200
100
0
400
300
200
100
012 14 16 18 20
Mea
sure
men
ts p
er b
in
RPM(a) (b) (c)12 14 16 18 20
RPM
Figure 4.2. Histogram of rotational speed of turbine during load conditions.(a) AC load (b) fixed PWM (c) constant DC.
The statistical analysis in paper II shows that for all three cases the rota-tional speed measurements have different variance and that the fixed PWMcase and the constant DC case have comparable average values. Figure 4.2shows that the DC voltage control was able to reduce the variance in rota-tional speed. Table 4.3 shows that the variance in the constant DC case isreduced with a factor 3.5 compared to the AC case. The variance of the fixedPWM case was 10 % lower than the AC case.
4.3.2 Current measurementsFigure 4.3 shows the AC currents in one phase for each load case. The ACcase has the highest amplitude for the current, fixed PWM second highest andthe constant DC case the lowest. The rectifier causes the non-sinusodial shapeof the currents drawn in the fixed PWM and the constant DC cases and resultsin a higher RMS-current which gives higher copper losses. The losses arecalculated with equation 3.1 and are shown in table 4.4.
32

0 100 200 ms 0 100 200 ms0 100 200 ms
A A A
-30
-20
-10
10
20
30
0
-30
-20
-10
10
20
30
0
-30
-20
-10
10
20
30
0
(a) (b) (c)
Figure 4.3. Currents in one phase from the generator.(a) AC load (b) fixed PWM (c) constant DC.
Figure 4.4 shows the load currents in the DC cases. Figure 4.4a shows thatthe duty cycle is constant and figure 4.4b shows that the duty cycle is changing,following the design of the control methods. The difference in amplitude forthe currents in figures 4.4a and 4.4b is roughly 30 A higher (∼ 16 % higher)for the fixed PWM case. Even though, as a result of the varying duty cyclein the constant DC case, the average power delivered to the load was merely∼ 2 % higher in the fixed PWM case compared to the constant DC case. Theaverage power calculated using the current and equation 3.1 is shown in table4.4.
0 2 4 6 8 1 0 12 14 16 18 20
0 2 4 6 8 10 12 14 16 18 20
200
150
100
50
0
Am
pere
[A]
200
150
100
50
0
Am
pere
[A]
Time [ms]
Time [ms]
(a)
(b)
Figure 4.4. Current in the load in the (a) fixed PWM case (b) constant DC case.
33

Table 4.4. Current, power and ηsystem from paper II.
Load case AC Fixed PWM Constant DCRload (Ω/phase) 3.52 0.86 0.86
Rlines + Rwindings (Ω/phase) 0.435 0.435 0.435iRMSphase (A) 20.77 23.23 23.53Pload (kW) 4.60 4.55 4.44Plosses (kW) 0.56 0.70 0.72
Plosses +Pload(kW) 5.16 5.26 5.17< Pturbine > (kW) 27.44 28.15 27.78
ηsystem 0.188 0.187 0.186
Table 4.4 shows measured resistances, calculated RMS phase current inthe transmission line, calculated average powers, Pturbine from table 4.1 andcalculated ηsystem from equation 2.10.
Out of the three cases, the losses were the biggest for the constant DC case,both in terms of magnitude and in terms of losses/total electric power deliv-ered. Despite having different size of losses and shapes of currents both drawnfrom the generator and delivered to the load, ηsystem was about the same forthe three load control methods.
4.4 Calibration of the simulation modelAn interval of minimum water speed can be seen from 13:09:20 to 13:09:33,see figure 4.5a. At an average speed of 1.4 m/s the water needs 11-12 secondsto reach the turbine from the ADCP. The result can be seen in the difference intime between the water speed measurement in figure 4.5a and in the rotationalspeed measurement in figure 4.5b. In the minimum water speed interval theaverage water speed is about 1.31 m/s. An interval of peak water speed canbe seen just before the minimum interval. The intervals points are used forcalibrating the drag losses of the turbine in the simulation. The peak ω isbetween 21.5-22.0 RPM and the minimum ω is between 19.5-20.5 RPM. Thetwo water speeds, referred to as high and low speed, were used as input in twoseparate simulations of operation with a load of 10 kΩ that symbolizes no loadoperation. The simulation was run for 60 s to let the simulation values stabilizeand to let the vortex code build up a wake. The last 30 s of the simulations areplotted in figures 4.6a and 4.6b. With drag losses of 900 Nm the high waterspeed simulation predicts 21.5-22.5 RPM and the low water speed simulationpredicts 19.5-20.5 RPM. The estimation of the drag losses are good enoughto simulate the turbine ω and generator voltage in the experimental free spinmeasurement.
34

08:58 09:07 09:15 09:24 09:33 09:41 09:50 09:59 10:07
20
20.5
21
21.5
22
22.5
08:41 08:49 08:58 09:07 09:15 09:24 09:33 09:41 09:50
1.3
1.32
1.34
1.36
1.38
1.4
1.42
1.44m/s
Time (minutes:second)(a) (b) Time (minutes:second)
r.p.m
.
Figure 4.5. (a) Measured water speed during 60 seconds. (b) Measured ω during 60seconds.
Seconds30 35 40 45 50 55 60
r.p.m.
21
21.5
22
22.5
23
Seconds30 35 40 45 50 55 60
r.p.m.
19
19.5
20
20.5
21
(a) (b)
Figure 4.6. Simulated ω during free spin operation during (a) peak water speed (b)minimum water speed.
Measured line to line voltage peaks at high water speed was 278-284 V and simulated line to line voltage peaks was 281-289 V, see figure 4 .7a. The simulation can predict the voltage of the generator in the high water speed interval within 2 % of the experimental measurement. Measured line to line voltage peaks at low speed was 263-273 V and simulated line to line voltage peaks was 261-265 V, see figure 4 .7b. The simulation can predict the voltage of the generator in the low water speed interval within 3 % of the experimental measurement.
35

Seconds50.2 50.25 50.3 50.35
Volt
-300
-200
-100
0
100
200
300
SimulatedMeasured
Seconds50.2 50.25 50.35
Volt
-300
-200
-100
0
100
200
300
(a) (b)50.3
SimulatedMeasured
Figure 4.7. Simulated and measured line to line voltage of the generator during freespin operation and (a) high water speed (b) low water speed.
4.5 Simulation resultsThe experiment was carried out during 826 seconds of operation on 2014-01-20. The target value was changed with discrete steps and kept for a time periodof at least one minute. The water speed interval of 1.1-1.25 m/s, seen to theleft in figure 4.8, and a DC bus voltage range of ∼ 75 V up to 180 V, seen tothe right in figure 4.8, covers operation in high λ , low λ and at λopt .
Seconds0 100 200 300 400 500 600 700 800 900
m/s
1
1.05
1.1
1.15
1.2
1.25
1.3
1.35
1.4
0 100 200 300 400 500 600 700 800 90060
80
100
120
140
160
180
200
Volt
Seconds(a) (b)
Figure 4.8. (a) Measured water speed. (b) Set target DC bus voltage.
The two step responses seen in figures 4.9a and 4.9b correspond to an in-crease (4.9a) and a decrease (4.9b) of target dc voltage that corresponds to firsta λ increase from 3.3 to 3.6 and then a λ decrease from 3.5 to 2.7. The speedof the step response and the initial and final values of the voltage are wellpredicted by the simulation when the turbine is simulated to operate close toλopt .
36

123.45 123.46 123.47 123.48 123.49 123.5 123.51 123.52 123.53 123.54 123.55
Volt
125
130
135
140
145
150
Simulated DC bus voltageTarget DC voltageExperimental voltage
Seconds210.74 210.745 210.75 210.755 210.76 210.765 210.77
Volt
105
110
115
120
125
130
135
140
145
150Simulated DC bus voltageTarget DC voltageExperimental voltage
(a) Seconds (b)
Figure 4.9. Simulated and experimental step response close to λopt . (a) An increaseof λ . (b) A decrease of λ .
The two step responses seen in figures 4.10a and 4.10b correspond to asmall increase (4.10a) and a large increase (4.10b) of target dc voltage thatcorresponds to first a λ increase from 1.8 to 2.4 and then a λ increase from2.6, passing λopt = 3.5, up to 3.8. Figure 4.10a shows how the simulated ω
increases much faster than the experimental ω . This is because the hydrody-namic simulation will estimate a too high power capture in low λ operation.
Seconds534.3 534.5 534.7
Volt
75
80
85
90
95
Simulated DC bus voltageTarget DC voltageExperimental voltage
Seconds594.25 594.35 594.45 594.55
Volt
90
100
110
120
130
140
150
160
170
SimulatedDC bus voltageTarget DC voltageExperimentalvoltage
(a) (b)
Figure 4.10. Simulated and experimental step response. (a) Far from λopt and anincrease of λ . (b) An increase of λ , passing λopt .
37

The step response in figure 4.11 shows a change in λ above λopt , from 3.7to 4.0. The speed of the step response and the initial and final values of thevoltage are well predicted by the simulation at operation above λopt .
Seconds726.24 726.26 726.28 726.30
Volt
160
165
170
175
180
185
Simulated DC bus voltageTarget DC voltageExperimental voltage
Figure 4.11. Simulated and experimental step response of an increase of λ above λopt .
For most of the step changes in λ , the experimental and simulated ω showan increase of ω of the same time scale. If you add rotational speed to thestep response in figure 4.9 you get the figure 4.12a where it takes less thanhalf a second to reach the new ω . The only step where the experimental andsimulated ω result do not agree is for the large step of low λ , past λopt , to ahigh λ , see figure 4.12b. As in the previsous steps, the initial and resulting dcbus voltage in the simulation agrees with the experimental result, but there isa big overshoot in ω and it takes a few seconds for it to stabilize. The controlsystem in the simulation does not brake the turbine ω as it is desgined to.However the dc bus voltage is not overshooting which indicates that there is avoltage drop missing in the model of the generator.
38

Seconds120 121 122 123 124 125 126 127 128 129 130
Volt
120
125
130
135
140
145
150
155
160
Simulated DC bus voltageTarget DC voltageExperimental voltageExperimental rpm (x10)Simulated rpm (x10)
Seconds592 593 594 595 596 597 598 599 600
Volt
80
100
120
140
160
180
200
Simulated DC bus voltageTarget DC voltageExperimental voltageExperimental rpm (x10)Simulated rpm (x10)
(a) (b)
Figure 4.12. Step response of the simulated and experimental voltage and ω (a) Noovershoot. (b) Overshoot in the simulated ω .
In the large step from low λ to high λ it takes about 0.3 s for the turbine toincrease the rotational speed to reach the target dc voltage. With ω = 11 RPMand a five bladed turbine the time period between blades of will be 1.09 s,and for ω = 16 RPM the time period will be 0.75 s. The step time of 0.3 srepresents 27.5 % and 40 % of the time between blades for ω = 11 RPMand ω = 16 RPM respectively. This means that it is likely that the turbineposition will be between the peaks of maximum power capture of the turbine.Changing the starting position of the turbine in the simulation changes theangle between the blade and the water flow at the time of the step. In figure4.13 the response time of the voltage decreases when the starting position ofthe turbine is moved with 15 and 30 degrees respectively. 15 and 30 degreescorresponds to a 20.8 % and 41.7 % relative move of the starting position.
Seconds594 594.1 594.2 594.3 594.4 594.5 594.6 594.7 594.8 594.9 595
Vol
t
90
100
110
120
130
140
150
160
170
Targetp DCp voltageExperimentp voltageSimulatedpDCpbuspvoltagep-p0pdegreesSimulatedp DCp bus voltage - 15 degreesSimulatedp DC bus voltage - 30 degrees
Figure 4.13. Step response of the dc bus voltage from low λ to high λ for differentstarting positions of the turbine.
39


5. Conclusions
In paper I, an experimental station was deployed and the first measurementsshowed that the generator and and turbine was able to deliver power to a re-sistive dump load without active control. The measurements from the down-stream ADCP clearly show a reduction in water speed during load operation.
In paper II, experimental results from three different control methods areanalyzed in this paper, and the results indicate that DC bus voltage controlis the best suited control for marine current applications. It has been experi-mentally verified that the DC bus voltage control system was able to lower thevariations of rotational speed with a factor of ∼ 3.5. The results show that theaverage tip speed ratio for all three cases was close to λopt = 3.5 but resultedin only ηsystem =∼ 19 %. An MPPT system should be able to increase ηsystem.
In paper III, a simulation model coupling the electrical and hydrodynamicparts of a vertical axis marine current energy converter has been validated. Themodel can be used for describing the behaviour of the turbine and generator fordifferent flow conditions by predicting the step response of the DC bus voltageand the rotational speed for a change in tip speed ratio. The simulation cannotpredict the behaviour when the turbine is operated far from optimal tip speedratio where the vortex model overestimates the power capture. By changingthe starting position of the turbine in the simulation it shows how the rise timeof the step response changes.
41


6. Future work
The work presented in this thesis has been focused on the first experimentalresults of the implemented control system and validating a simulation model.
The simulation model can be used to inverstigate control methods for dif-ferent MPPT topologies.
There is a lower limit to at what water speed the turbine will start to absorbpower. This limit will be investigated to determine what water speeds aresuitable for extracting power. This limit will depend on the turbulence in thewater and the ability of the system to stay at a certain λ .
The experiments in this thesis have recorded data during 30 minutes. Itwould be interesting to do longer experiments with an autonomous drive of anMPPT to investigate the utilization factor for marine currents in a river usinga vertical axis turbine.
43

7. Summary of papers
In the following text the papers in the thesis are summarized and the author’scontribution is presented.
Paper IThe Söderfors Project: Experimental Hydrokinetic Power StationDeployment and First Results.During 2013 an experimental hydrokinetic power station was deployed forin-stream experiments at a site in a river. This paper briefly describes thedeployment process and reports some initial results from measurements madeat the test site.
The paper was presented by the author at EWTEC in Aalborg, September,2013. The author and the main author Staffan Lundin did the majority of theexperimental work and Staffan did the majority of the writing. The MarineCurrent Power group deployed the experimental station in a joint effort.
Paper IIExperimental Results of a DC Bus Voltage Level Control for aLoad-Controlled Marine Current Energy Converter.This paper investigates three load control methods for a marine current en-ergy converter using a vertical axis turbine mounted on a permanent magnetsynchronous generator. The three cases are; a fixed AC load, a fixed pulsewidth modulated DC load and a DC bus voltage control of a DC load. Exper-imental results show that the DC bus voltage control reduces the variation ofrotational speed with a factor of 3.5. For all three cases, λ can be kept closeto the expected λopt . However, for all three cases the average extracted powerwas about half of the estimated 36 %. A Maximum Power Point Tracking(MPPT) system, with or without water velocity measurement, should increasethe average extracted power.
The paper was published in Energies in May 2015.The author did the majority of the work.
44

Paper IIIValidation of a Coupled Electrical and Hydrodynamic Simulation ModelFor Vertical Axis Marine Current Energy Converters.This paper validates a simulation model for a Vertical Axis Turbine (VAT)connected to a Permanent Magnet Synchronous Generator (PMSG) in a directdrive configuration. The simulated system consists of the electrical systemand a hydrodynamic vortex model for the turbine. Experiments of no load op-eration were conducted to calibrate the drag losses of the turbine. Simulationswere able to predict the behaviour of a step response for a change in Tip SpeedRatio (TSR) when the turbine was operated close to optimal TSR. The turbinestarting position could be changed to view the influence of changed relativeposition of the turbine to the water flow in the step response.
The paper is a manuscript.The author designed the electrical system and did the majority of the writ-
ing.
45


8. Sammanfattning på svenska
Marin strömkraft med vertikalaxlad turbin är ett nytt koncept inom förnybarel. Tanken är att med hjälp av en turbin och generator placerad på botten kunnautnyttja energin i fritt strömmande vatten för att konvertera till elektrisk energi.Tekniken är i grunden lik vertikalaxlad vindkraft med den stora skillnaden attturbin och generator befinner sig under vatten. För att maximera effektup-ptaget av turbinen behöver man hålla kvoten mellan rotationshastigheten hosturbinen och vattenhastigheten, löptalet, vid ett visst värde. För att utveckla ettstyrsystem som kan hålla optimalt löptal behöver man veta hur turbinen ochgeneratorn beter sig i vattnet, hur förlusterna och eventuella risker relaterar sigtill olika typer av drift. Den här avhandlingen består av tre artiklar; Den förstabeskriver sjösättningen av experimentstationen och presenterar de första re-sultaten, den andra visar prestanda från det implementerade styrsystemet somfinns idag och den tredje artikeln visar hur en kombinerad simulering av sys-temets elektriska och hydrodynamiska egenskaper kan valideras med hjälp avexperimentella data. Artikel två konstaterar att det är möjligt att hålla tur-binen vid ett fixt varvtal med väldigt små variationer på bekostnad av högreförluster. Nästa steg blir att utveckla ett system som kan maximera effektup-ptaget men samtidigt minimera förlusterna. Simuleringsmodellen som tagitsfram kan förutse turbinens och generatorns egenskaper för ett steg i löptal näraoptimalt löptal. Simulerings-koden kan användas för att förutse systemets be-teende vid situationer som vi antingen inte kan, eller vill riskera, att utsättasystemet för, t.ex. vattenhastigheter utöver vad systemet är designat för. Mod-ellen kan också användas för att testa olika kontrollmetoder för att optimeraeffektupptaget av turbinen.
Författarens huvudfokus kommer i fortsättningen ligga i att utveckla styrsys-temet och undersöka startförloppet av turbinen.
47


Acknowledgements
Thank you to my main supervisor Mats Leijon and my second co-supervisorJan Sundberg for giving me this opportunity. A special thanks goes to my firstco-supervisor Karin Thomas for all the help and guidence during a sometimesquite stressfull period.
I would like to say thank you to the Marine Current Power Group: Thankyou Nicole, Anders, Staffan, Emilia, Thao and Irina.
A special thank you to two previous members of the group: Dr KatarinaYuen and Dr Mårten Grabbe. Thank you for all the help and guidance duringmy first time as a PhD student. Thank you for keeping a positive and motivat-ing attitude towards science. Thank you for answering all my clever questions,especially the stupid ones.
Thank you Senad Apelfröjd for knowing your stuff, and thank you MartinFregelius for solid lab work.
Dear Sir Mr Chairman, Rickard Ekström, thank you for your help, yoursportmanship and your "great" sense of humor. I hope you are still enjoyingyour mug.
My roomates, Liselotte, Nicole, Valeria, Linnea, the ADCP raft, Stefan andAnders: thanks for making it fun to go to the office. And thank you for all thewednesday-fika. And thank you for motivating me to work on fridays. I likesushi. I hope you will not miss me too much when I move to my new office sofar away, I will try to come visit.
Eduard, thanks for all the super interesting and rewarding meetings lately,they have greatly helped my progress at work. We managed to save the worldonce, and there is surely more to come! Vi får ta en liten jävel snart.
Victor and Kaspar, my Whats App guys! Thanks for all the fun times!I’ve gotten to know great people from of an impressively wide range of
nationalities! Francisco, Maria, Markus, Saman, Johan, Johan, Johan, Johan(i think i got them all), Wei, Flore, Malin, Weijia and Juan. As we say inswedish: "Variation förnöjer"!
Ling, i trust i can call you Dr Hai by now! Congratulations and good luckin China, i will miss you.
Shiuli and Michael, such a great couple that are always happy and easygoing. Always great to see you, inside and outside of Ångström.
Ola, Claire and Amélie, thank you for making taking care of a baby look soeasy!
Ante, Perra, Ubbe and A-skott. Mina äldsta vänner. Great people that mademe who I am today! Perra, nihao and good luck in China!
49

Thank you my my petite famille, Lucie and Maël. Lucie, thank you forintroducing me to the world of science. Maël, thank you for reminding me ofthe joy of exploring and to sink my teeth into anything i can find.
Mamma och pappa och familjen, det går framåt för minstingen på jobbet!Thank you to all the friends i have gotten to know in the department over
the years. You will get to enjoy my presence at least a few more years.The work was carried out using grants from StandUp, Åforsk, Vattenfall, J
Gust Richert, Energimyndigheten, VR and Bixia Miljöfond.
50

References
[1] J. Ribrant and L. M. Bertling, “Survey of failures in wind power systems withfocus on swedish wind power plants during 1997–2005,” IEEE Transactions onEnergy Conversion, vol. 22, no. 1, pp. 167–173, March 2007.
[2] P. L. Fraenkel, “Marine current turbines: Moving from experimental test rigs toa commercial technology,” in Proceedings of the 26th International Conferenceon Offshore Mechanics and Arctic Engineering, OMAE 2007, June 2007, pp.1–10, OMAE2007-29642.
[3] G. I. Gretton and T. Bruce, “Hydrodynamic modelling of a vertical-axis tidalcurrent turbine using a navier-stokes solver,” in Proceedings of the IXth WorldRenewable Energy Conference, WREC IX, August 2006.
[4] M. Shiono, K. Suzuki, and S. Kiho, “An experimental study of thecharacteristics of a Darrieus turbine for tidal power generation,” ElectricalEngineering in Japan, vol. 132, no. 3, pp. 38–47, 2000, transl. from DenkiGakkai Ronbunshi, vol. 118-B, No. 7/8, 1998, pp. 781–787.
[5] L. Myers and A. S. Bahaj, “Power output performance characteristics of ahorizontal axis marine current turbine,” Renewable Energy, vol. 31, pp.197–208, 2006.
[6] A. J. Berstad and H. Tronstad, “Development and design verification of afloating tidal power unit,” in Proceedings of the 26th International Conferenceon Offshore Mechanics and Arctic Engineering, OMAE 2007, San Diego,California, USA, June 10–15 2007, pp. 1–8.
[7] Y.-D. Choi and P. M. Singh, “Shape design and numerical analysis on a 1 MWtidal current turbine for the south-western coast of Korea,” Renewable Energy,vol. 68, pp. 485–493, March 2014.
[8] S. Eriksson, H. Bernhoff, and M. Leijon, “Evaluation of different turbineconcepts for wind power,” Renewable & Sustainable Energy Reviews, vol. 12,no. 5, pp. 1419–1434, June 2008.
[9] J. Kjellin, “Vertical axis wind turbines: Electrical system and experimentalresults,” Ph.D. dissertation, Uppsala University, 2012, Acta UniversitatisUpsaliensis. Digital Comprehensive Summaries of Uppsala Dissertations fromthe Faculty of Science and Technology 981.
[10] S. Apelfröjd, F. Bülow, J. Kjellin, and S. Eriksson, “Laboratory verification ofsystem for grid connection of a 12 kW variable speed wind turbine with apermanent magnet synchronous generator,” in Proceedings of EWEA 2012,European Wind Energy Conference & Exhibition, Copenhagen, Denmark, 2012.
[11] M. Abbes, J. Belhadj, and A. Ben Abdelghani Bennani, “Design and control ofa direct drive wind turbine equipped with multilevel converters,” RenewableEnergy, vol. 35, pp. 936–945, 2010.
[12] M. G. Molina and P. E. Mercado, “A new control strategy of variable speedwind turbine generator for three-phase grid-connected applications,” in
51

Transmission and Distribution Conference and Exposition: Latin America,2008 IEEE/PES, Bogotà, Colombia, 2008.
[13] S. Eriksson, J. Kjellin, and H. Bernhoff, “Tip speed ratio control of a 200 kWVAWT with synchronous generator and variable DC voltage,” Energy Scienceand Engineering, vol. 1, no. 3, pp. 135–143, 2013.
[14] J. Kjellin, S. Eriksson, and H. Bernhoff, “Electric control substituting pitchcontrol for large wind turbines,” Journal of Wind Energy, vol. 2013, pp. 1–4,2013.
[15] J. S. Thongam, P. Bouchard, H. Ezzaidi, and M. Ouhrouche, “Wind speedsensorless maximum power point tracking control of variable speed windenergy conversion systems,” in Proceedings of the 2009 IEEE InternationalConference on Electric Machines and Drives, 2009, pp. 1832–1837.
[16] M. E. Haque, M. Negnevitsky, and K. M. Muttaqi, “A novel control strategy fora variable speed wind turbine with a permanent magnet synchronous generator,”in 2008 IEEE Industry Applications Society Annual Meeting, 2008, pp. 1–8.
[17] H. G. Jeong, R. H. Seung, and K. B. Lee, “An improved maximum power pointtracking method for wind power systems,” Energies, vol. 5, pp. 1339–1354,2012.
[18] J. S. Choi, R. G. Jeong, J. H. Shin, C. K. Kim, and Y. S. Kim, “New controlmethod of maximum power point tracking for tidal energy generation system,”in Proc. International Conference on Electrical Machines and Systems, Seoul,Korea, October 2007.
[19] S. Apelfröjd, R. Ekström, K. Thomas, and M. Leijon, “A back-to-back 2L-3Lgrid integration of a marine current energy converter,” Energies, vol. 8, pp.808–820, January 2015.
[20] E. Segergren, “Direct drive generator for renewable power conversion fromwater currents,” Ph.D. dissertation, Uppsala University, 2006, Acta UniversitatisUpsaliensis. Digital Comprehensive Summaries of Uppsala Dissertations fromthe Faculty of Science and Technology 981.
[21] K. Thomas, “Low speed energy conversion from marine currents,” Ph.D.dissertation, Uppsala University, 2007, Acta Universitatis Upsaliensis. DigitalComprehensive Summaries of Uppsala Dissertations from the Faculty ofScience and Technology 981.
[22] K. Yuen, “System perspectives on hydro-kinetic energy conversion,” Ph.D.dissertation, Uppsala University, 2012, Acta Universitatis Upsaliensis. DigitalComprehensive Summaries of Uppsala Dissertations from the Faculty ofScience and Technology 981.
[23] A. Goude, “Fluid mechanics of vertical axis turbines: Simulations and modeldevelopment,” Ph.D. dissertation, Uppsala University, 2012, Acta UniversitatisUpsaliensis. Digital Comprehensive Summaries of Uppsala Dissertations fromthe Faculty of Science and Technology 981.
[24] E. Lalander, “Hydrokinetic resource assessment: Measurements and models,”Ph.D. dissertation, Uppsala University, 2013, Acta Universitatis Upsaliensis.Digital Comprehensive Summaries of Uppsala Dissertations from the Faculty ofScience and Technology 981.
[25] M. Grabbe, “Hydro-kinetic energy conversion: Resource and technology,”Ph.D. dissertation, Uppsala University, 2013, Acta Universitatis Upsaliensis.
52

Digital Comprehensive Summaries of Uppsala Dissertations from the Faculty ofScience and Technology 981.
[26] M. Grabbe, K. Yuen, A. Goude, E. Lalander, and M. Leijon, “Design of anexperimental setup for hydro-kinetic energy conversion,” International Journalon Hydropower & Dams, vol. 15, no. 5, pp. 112–116, 2009.
[27] K. Yuen, S. Lundin, M. Grabbe, E. Lalander, A. Goude, and M. Leijon, “TheSöderfors project: Construction of an experimental hydrokinetic power station,”in Proceedings of the 9th European Wave and Tidal Energy Conference,EWTEC11, Southampton, UK, 5-9 September 2011, pp. 1–5.
[28] M. Grabbe, K. Yuen, S. Apelfröjd, and M. Leijon, “Efficiency of a directlydriven generator for hydrokinetic energy conversion,” Advances in MechanicalEngineering, vol. 2013, p. 8, 2013, article ID 978140.
[29] F. Bülow, “A generator perspective on vertical axis wind turbines,” Ph.D.dissertation, Uppsala University, 2013, Acta Universitatis Upsaliensis. DigitalComprehensive Summaries of Uppsala Dissertations from the Faculty ofScience and Technology 981.
[30] S. Eriksson, “Direct driven generators for vertical axis wind turbines,” Ph.D.dissertation, Uppsala University, 2008, Acta Universitatis Upsaliensis. DigitalComprehensive Summaries of Uppsala Dissertations from the Faculty ofScience and Technology 981.
[31] A. Betz, “Das Maximum der theoretisch möglichen Ausnutzung des Windesdurch Windmotoren,” Zeitschrift für das gesamte Turbinenwesen, September1920.
[32] C. Garrett and P. Cummins, “The efficiency of a turbine in a tidal channel,”Journal of Fluid Mechanics, vol. 588, pp. 243–251, October 2007.
[33] K. Yuen, K. Thomas, M. Grabbe, P. Deglaire, M. Bouquerel, D. Österberg, andM. Leijon, “Matching a permanent magnet synchronous generator to a fixedpitch vertical axis turbine for marine current energy conversion,” IEEE Journalof Oceanic Engineering, vol. 34, no. 1, pp. 24–31, 2009.
[34] K. Yuen, S. Apelfröjd, and M. Leijon, “Implementation of control system forhydro-kinetic energy converter,” Journal of Control Science and Engineering,vol. 2013, 2013, article ID 342949.
53