Embed Size (px)
Citation preview

1
TMS570LS Architecture Overview: Memory Map, Clocking, Exceptions

2
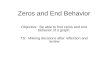
Architecture Overview
Flex
Ray
Flex
Ray
Flex
Ray
DC
AN
sD
CA
Ns
Mib
SPI/
Mib
SPIP
Mib
SPI
Mib
SPI
/ / Mib
SPIP
Mib
SPIP
Mib
AD
Cs
Mib
AD
Cs
Mib
AD
Cs
NH
ET
NH
ET
NH
ET
GIOGIO
GIO
EC
PE
CP
EC
P
Peripheral BusPeripheral Bus
RTIRTI SYSSYS VIMVIM
Bus MatrixBus Matrix
CRCCRC A2VA2V
RAMRAM
Peripheral Library
LIN
/SC
ILI
N/S
CI
LIN
/SC
I
POM
POM
EMIFEMIF
PROGRAM
FLASH
HTUHTU
FTUFTU
DMADMADMMDMMDAPDAP
RTPRTP
RTP
Cortex-R4(F)Cortex-R4(F)
32-bit ARMCortex-R4(F)32-bit ARM
Cortex-R4(F)
Bus Matrix masters
Peripherals
Arbitration logic
Memory related logic

3
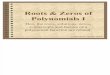
Memory Map
0x00000000
0x00 1FF FFF
0x080000000x080 27FFF
CRC0xFE0000000xFEFFFFFF0xFF0000000xFFF7FFFF
SYSTEM Modules0xFFF800000xFFFFFFFF
0x0 04000000x00 4FFFFF
0x0 84000000x084 27FFF
EMIF (256MB)0x60000000
0x6FF FFFFF
CS1CS0
CS2CS3
0x600000000x603FFFFF
POM (4MB)
TMS570LS20216
0x20000000
0x20 1FF FFF
0x2 04000000x20 4FFFFF
Flash (2MB)
Flash - ECC
RAM (160kB)
RAM - ECC
Flash (2MB) (mirrored image)
Flash – ECC (mirrored image)
Peripherals

4
Clock Sources and Domains
/1..64 X92..184 /1..8 /1..32
Low Power Oscillator
/1..2 X1..15 /1..8
OSCIN
/1..16
/1..16
0
1
4
5
6
GCLK (to CPU)
HCLK (to System Bus)
VCLK (to Peripheral Bus)
VCLK2 (to NHET/HTU)
01456
VCLK
VCLKA1 (to DCANx)
01456
VCLK
VCLKA2 (to FlexRay/FTU)
01456
VCLK
/1,2,4, or 8
RTI1CLK (to RTI)
Clock Source #

5
Frequency Modulated PLL (FMzPLL)
REFCLKDIV PLLDIV
PLLMUL
ODPLL PLLCTL2
PLLCTL1
PLLCLK, fPLLOSCIN, fOSCIN
Where
NR – Reference Clock Divider ratio (REFCLKDIV)NF – PLL feedback divider ratio (PLLMUL), 92 .. 184ODPLL – PLL output divider ratio (ODPLL), 1 .. 8R – PLL Divider Ratio (PLLDIV), 1 .. 32
Configure FMzPLL using PLLCTL1(0x70) and PLLCTL2 (0x74) registers of System frame1 (0xFFFF_FF00)
The output frequency of the FMzPLL is given by:

6
FMzPLL Calculator
• Can be used to determine PLLCTL1 and 2 register values based on the entered PLL and FM option settings• Can be used to determine the PLL and FM settings based on the entered PLLCTL1 and 2 register values

7
Secondary Non-Modulating PLL (FPLL)
Where
NR – Reference Clock Divider ratio (REFCLKDIV), /1 .. 2NF – PLL feedback divider ratio (PLLMUL), X1 .. 15R – PLL Divider Ratio (PLLDIV), /1 .. 8
Configure FPLL using FPLLCTL(0x00) register of System frame2 (0xFFFF_E100)
The output frequency of the FPLL is given by:
/NR
/ 1 .. 2
OSCIN
PLL
x NF
x 1 .. 15
/R
/ 1 .. 8
PLLCLK

8
FPLL Calculator
• Can be used to determine FPLLCTL register values based on the entered PLL settings• Can be used to determine the PLL settings based on the entered FPLLCTL register value

9
Low Power Modes
• Doze Mode– Highest power consumption among low power modes– Fastest from wake up event to full-speed operation– Main oscillator remains active and clocks RTI module– Wake up from RTI or external sources (CAN, LIN, SCI, GIO, reset)
• Snooze Mode– Power consumption near minimum– Allows fast wake up using internal reference oscillator– Only internal reference oscillator remains active and clocks RTI module– Wake up from RTI or external sources (CAN, LIN, SCI, GIO, reset)
• Sleep Mode– Lowest power consumption among low power modes– Slowest from wake up event to full-speed operation– All clock sources and clock domains are disabled– Wake up only from external sources (CAN, LIN, SCI, GIO, reset)

10
Low Power Modes Summary
High freq. oscillator
Internal low freq. clock
RTI clock
GCLK HCLK VCLKP VCLK2 VCLKA1 VCLKA2 PLL Flash banks
Flash pumps
on on on off off off off off off off off off
High freq. oscillator
Internal low freq. clock
RTI clock
GCLK HCLK VCLKP VCLK2 VCLKA1 VCLKA2 PLL Flash banks
Flash pumps
off on on off off off off off off off off off
LPO Internal low freq. clock
RTI clock
GCLK HCLK VCLKP VCLK2 VCLKA1 VCLKA2 PLL Flash banks
Flash pumps
off off off off off off off off off off off off
Doze Mode:
Snooze Mode:
Sleep Mode:

11
Reset Sources
• Power-on Reset– Asserted by external voltage supervisor, or by internal voltage monitor
• Oscillator fail– Asserted by internal clock monitor when enabled by software
• CPU Reset– Asserted by CPU self-test controller after LBIST operation completes
• Software Reset– Asserted by software writing to the exception control register
• External Reset– Asserted by external circuitry driving the warm reset (nRST) signal LOW
• Debug Reset– Asserted by ICEPICK JTAG module

12
TMS570LS: Flash Tools

13
nowECC
<return_value> nowECC [options] -i <input_file> [-o <output_file>]<return_value> nowECC [options] -i <input_file> [-o <output_file>]
• Generates ECC data for program flash
• Command-line executable
• Return value = 0 indicates no error during operation– Separate error codes to differentiate each type of error
• Input_file is only required parameter– Can be Extended Tektronix, Intel Hex, Motorola-S, COFF or ELF format
• Output_file specifies the name of the output file to be generated– If no name is specified, ECC is appended to input file specified

14
Options for Flash Programming
• On-board programming using nowFlash/Code Composer Studio v4.x– Requires JTAG connection– Emulators Supported:
• Blackhawk BHUSB560M• Spectrum Digital XDS510PP, XDS510PP+, XDS510USB,
XDS560RUSB• Signum JTAGjet• Texas Instruments SPI525, XDS100v2, XDS560
• On-board programming via customer boot-loader code– Must use Texas Instruments released API routines– Multiple communication interfaces can be used– Necessary to validate program and erase routines
• Off-board programming– Single-device or Concurrent programming– Supports high degree of automation

15
nowFlash
• PC-based software tool: GUI + command line executable• Communicates with microcontroller via JTAG• Can be used to program, erase, read, or verify flash memory• Also supports execution of custom code out of RAM (from command line only)

16
Flash Application Programming Interface
• Distributed only as an object library file
• Supports flash operations out of on-chip RAM
• Supports operations at max specified device clock frequency
• Library routines for– Blank check– Compaction– Erase– Program zeros– Program data– Calculate checksum– Verify
• Routines also manage ECC

17
TMS570LS: Real-Time Interrupt Module (RTI)

18
RTI: Block Diagram

19
RTI: Main Features
• Two independent counter blocks for generating different time bases
• Each block consists of– One 32-bit prescale counter– One 2-bit free-running counter– Two capture registers for capturing the prescale and free-running counters
• External event can be used for incrementing free-running counter 0– Can be used for synchronizing with FlexRay bus communication cycle
• Four compare interrupts– Each can use either of the two available free-running counters– Automatic update of compare values to minimize CPU intervention– Option to generate DMA request as well as the compare interrupt
• Two counter-overflow interrupts– Generated when a free-running counter overflows and goes to zero
• Four compare interrupts

20
TMS570LS: Vectored Interrupt Manager (VIM)

21
VIM: Block Diagram
PRI
ORITY
DECODER
INT0
INT63
FIQ
IRQPhantom Interrupt
Address ISR0
Address ISR1
Address ISR61
Address ISR62
VIM RAM
VBUS
WRAPPER
VBUS
REGISTERS
VBUSP
IRQVECTADDR [31:0]
IRQACK } Vector InterruptInterfacefrom CPU
P
CHANNEL
MAPPING

22
VIM: Main Features
• VIM Hardware– Dedicated Vector Interrupt interface to ARM CPU– Hardware relocation of the IRQ vector address– Hardware assistance for prioritizing and controlling interrupt sources
• VIM Functions– 64 interrupt requests – Map interrupt request to interrupt channel via programming.– Provides programmable priority through interrupt request mapping– Prioritizes the interrupt channels to the CPU– Provides the CPU with the address of the interrupt service routine (ISR)
• VIM Modes– Legacy ARM7 Mode (FIQ/IRQ)– Vectored interrupt (FIQ/IRQ)– Hardware vectored interrupt (IRQ only)

23
VIM: Interrupt Servicing ModesLegacy ARM7 Interrupts
• FIQ/IRQ request
• Fetch from 0x18/0x1C
• Branch to ISR handler
• Load Interrupt offset
• Decision which ISR to execute (FIQIVEC / IRQIVEC)
• Branch to ISR
Vectored Interrupts
• FIQ/IRQ request
• Fetch from 0x18/0x1C
• Branch to ISR (LDR PC, [PC, #-0x1B0]),address for highest active interrupt request derived from IRQVECREG/FIQVECREG
Hardware Vectored Interrupts
• IRQ request (only)
• CPU reads IRQ vectoraddress instead of 0x18
• VIM provides address of highest pending request directly to CPU vector interface
• CPU branches directly to ISR
• Note - processor state afterIRQ entry: T flag = VECTOR[0],LSB of vector address determines if first instructionof interrupt handler is ARM or Thumb instruction

24
VIM: Channel Mapping - Default State
priority
high
low
• Note - NMI (Non-Maskable Interrupt): Channel 0 and Channel 1 are called NMI Channels and are non-maskable.• Interrupt requests can be mapped to desired channel using CHANMAPx registers.

25
VIM: Input Channel Management
wake-up logic is asynchronous, but reset is synchronous

26
VIM: Wake-up Generation
Wake-up interrupt generation
detail of the interrupt request input
(to global clock module)

27
VIM: Vector RAM
• not initialized after reset• used for vectored interrupts• 64 x32bit organization• 32/16/8bit access• VIM read has always priority
over peripheral bus interface• RAM protected by parity
RAMVIM RAM address space

28
TMS570LS: Direct Memory Access (DMA)

29
DMA: Main Features
• 32 channels with individual enable
• 64 DMA requests– Software and hardware
DMA requests (event synchronization)
• Support 8, 16, 32 or 64 bit transaction
• Multiple addressing modes for source/destination
– fixed, incrementing, indexed
• Auto Initiation
• Channel chaining capability
• 1 FIFO (First In First Out)
• One AHB master port (64 bit wide) to interface with the bus matrix
• One slave port to interface with VBUS for register interface
• Memory Protection for the address range DMA can access

30
DMA: Transfer Definitions
Element
RES
WES
11: Double-word, 64bit 10: Word, 32bit 01: Half-word, 16bit 00: Byte, 8bit
RES, Read Element Size WES, Write Element Size
Element 1Element 2…..
Element N
…..
FrameFrame 1
Frame 2
…..
Frame M
…..
Block
N = Element Transfer Count (ETCOUNT) M = Frame Transfer Count (FTCOUNT)
N·M = Size of Block

31
DMA: Addressing Modes
• Constant– Source/Destination address do not change– e.g. SCI transmit and/or receive register (constant address)
• Post Increment– Source/Destination address is post incremented by the element size
(Byte, Half-word, Word, Double-word)– e.g. RAM to RAM transfer
• Indexed– Source/Destination address is post incremented as defined in the
element index offset register and the frame index offset register– Indexed addressing always works with Byte size

32
DMA: How to Start a Transfer?
• Software requests– By setting bit x in SWCHENAS [31:0] register transfer (channel x) will
be triggered.
• Hardware requests– An active DMA request signal will trigger a DMA transaction.– Up to 64 DMAREQ lines can be handled.– Since DMA controller is clocked by HCLK, the duration of all DMA
requests signals must be at least HCLK long.
• Triggered by other control packet– When a control packet finishes the programmed number of transfers
it can trigger another channel to initiate its transfers.

33
DMA: Frame or Block Trigger (TType)

34
DMA: Request Mapping/Control Packets

35
TMSx70 Software
6 5 5 4 4 3 3 2 2 1 1 0
Element transfer counter
3
DMA transfer
Setup of control packet x:• Source Address = start of source buffer• Destination Address = start of destination buffer
• Element Transfer Count = 6 • Frame Transfer Count = 1
• Read Element Size = Word (32 bit), also 8, 16 or 64 bit is possible • Write Element Size = Word (32 bit), also 8, 16 or 64 bit is possible• Addressing Mode Read = post-increment read address• Addressing Mode Write = post-increment write address
Setup control registers:• DMA_EN: Enable DMA controller after setup of control packet x
• SWCHENAS: Writing a one to the associated channel x to trigger a SW request
1
1
2
DMA: RAM to RAM transfer example
2 2 2 2 2
CPU Interrupt (optional)
Control packet x
RAM Buffer (32 bit)(destination)
RAM Buffer (32 bit)(source)
Frame Index Pointer
Element Index Pointer
Channel Configuration
Transfer Count
Destination Address
Source Address
2
Interrupt Service Routine of control packet x:• Process transferred data with CPU
3

36
DMA: Channel Interrupts
• Each channel can be configured to generate interrupts on several transfer conditions:
– FTC (Frame Transfer Complete) interrupt
– LFS (Last Frame Transfer Started) interrupt
– HBC (First Half of Block Complete) interrupt
– BTC (Block Transfer Complete) interrupt
– BER (Bus Error) interrupt

37
DMA: Memory Protection
0xFFFFFFFF
0xFFF78000
0x08003FFF
0x08000000
0x00000000
Region 3
Region 3
Region 1
Region 0
System + Peripherals
RAM
No access restriction
Access restriction apply
0xFFFFFFFF
0xFFF78000
0x08003FFF
0x08000000
0x00000000
Region 3
Region 2
Region 1
Region 0
System + Peripherals
RAM
No access restriction
Access restriction apply

38
TMS570LS: General-Purpose I/O (GPIO)

39
GPIO: Block Diagram
External pin
GIODSETx
GIODOUTx
GIODINx
GIOPDRx
GIODCLRx
High-level-interrupt
handling
Low-level-interrupt
handlingGIOLVLSET
High priority
Low priorityInterrupt enable
Interrupt disable
GIOENASETGIOFLGGIOPOL
Rising edge
Falling edge
To VIM
To VIM
VBU
S
GIOPULDIS
GIOPSL
GIODIRx
GIOENACLR GIOLVLCLR
GIOINTDET
OPEN DRAIN LOGIC GATES

40
GPIO: Main Features
• Configurable as Input or Output via Direction Register
• Read/Write Registers
• Set Registers
• Clear Registers
• Separate Input Register
• Pull-up/Pull-down Configurability
• Open Drain Capability
• Interrupt Capability– Configurable Priority– Configurable Polarity: rising edge, falling edge, or both edges

41
TMS570LS: New High-End Timer (NHET)

42
• User-programmable Timing Co-Processor
• Provides high level and complex timing functions with low CPU overhead
• 128 word instruction RAM with Parity protection
• Dedicated DMA functionality (HTU) to transfer data from NHET to Data Ram w/o CPU
• Conditional program execution based on pin conditions and compares
• 32 input/output (I/O) channels (pins) for complex or classical timing functions such as capture, compare, PWM, GPIO
• Suppression filters eliminate undesired input frequencies
• Multiple 25-bit virtual counters for timers, event counters, and angle counters
• High Resolution I/Os and coarse resolutions implemented by sub loops for multiple resolution capability
High End Timer (HET)
32 I/O Channels
Hostinterface
Address/Data Bus
TimerRAM
ExecutionUnit
Input/Output
Unit
Compare
32 bit ALU
Register A, B, T
Instruction Register
Address Register
Interrupt Control
Operation Control
Program RAM Control RAM Data RAM
CPU wait control
Shadow registers Prescaler
Global & prescale control register
I/O ControlRegister
Synchronizers
32 High Resolution Channels

43
NHET: Application ExamplesPulse Width Modulation
• Single / multi channel PWMs
• PWM with synchronous / asynchronous duty cycle update
• PWM with synchronous period update
• Phase shift PWM's using RADM64 instruction
Frequency and Pulse Measurements
• Pulse width and period measurement (using PCNT)
• Period measurement using PCNT in HR mode, HRshare feature and 64 bit read access with “auto read/clear” bit set
Other Features
• Frequency Modulated Output
• Pulse width count (using PWCNT)
• Time stamp (using WCAP)
• Event counter (using ECNT)
• Pulse accumulator example (using ECNT )
• Multi-resolution scheme

44
NHET: Timer RAM
• Timer RAM uses 4 RAM banks
• Each bank supports Dual Port Access (one RAM address may be written while another address is read)
• Third access possibility to RAM by CPU, TU or DMA
• RAM words are 96-bits wide (3*32bit, program, control, data)
• Write access by word (32bit) only
• Read access is allowed by 8-bit, 16-bit and 32-bit

45
HETDSETHET[x]
HETDIR
HETDCLR
HETDOUT
HR control logic
HR flags, HR register
HR up / down counter (5 bits)
Timer data inHR prescale driverHigh resolution clock
HR compare data
Timer data out
Timer data in
HETDIN
Loop Resolution Clock
NHET: I/O Structure
HETPDR
HETPULDIS
HETPSL
HET Pull Control Logic

46
NHET: Instruction Set OverviewMnemonic Instruction Name Cycles
ACMP Angle Compare 1ACNT Angle Count 2
ADCNST Add Constant 2ADM32 Add Move 32 1 or 2APCNT Angle Period Count 1 or 2
BR Branch 1CNT Count 1 or 2
DADM64 Data Add Move 64 2DJNZ Decrement and Jump if Non-Zero 1ECMP Equality Compare 1ECNT Event Count 1MCMP Magnitude Compare 1MOV32 Move 32 1 or 2MOV64 Move 64 1PCNT Period/Pulse Count 1
PWCNT Pulse Width Count 1RADM64 Register Add Move 64 1
SCMP Sequence Compare 1SCNT Step Count 3SHFT Shift 1WCAP Software Capture Word 1
WCAPE Software Capture Word and Event Count 1

47
NHET: Command Line Assembler
• Invoking the NHET assembler (hetp.exe): hetp [options] input file
• Options:– -c32 produces an output file containing assembler directives for the TMS570
CodeGen Tools– -hc32 produces a C file and a header file. (used together with the -nx option)– -nx specifies the x-th HET module on the device (used together with -hc32
option)– -l (lowercase L) produces a listing file with the same name as the input file
with a .lst extension.– -x produces a cross-reference table and appends it to the end of listing file.
• Example: hetp -hc32 -n0 pwm.het• Input: pwm.het contains the assembly source of the HET program• Output: pwm.c provides a C array, which contains the HET
program opcodepwm.h provides a C structure, which allows a simple
access to the NHET fields from other C code

48
NHET: Time Base
• VCLK2 is used as base clock for the High End Timer
• A 6-bit prescaler dividing the system clock by a user-defined high-resolution (HR) prescale divide rate (hr) stored in the 6-bit HR prescale factor code (with a linear increment of codes).
• A 3-bit prescaler dividing the HR clock by a user-defined loop-resolution prescale divide rate (lr) stored in the 3-bit loop-resolution prescale factor code (with a power of 2 increment of codes).
High Resolution (HR) prescaler (6 bits)
Loop Resolution (LR) prescaler (3 bits)
VCLK2 Loop Resolution clock
High Resolution clock

49
TMS570LS: High-End Timer Transfer Unit (HTU)

50
HTU: Block Diagram

51
HTU: Main Features
• CPU and DMA independent
• Master Port to access directly system memory
• HTU master accesses protected by dedicated Memory protection Unit
• One Slave port to interface with VBUS for register interface
• Maximum of 8 double control packets supporting dual buffer configuration
• Control packet information is stored in RAM protected by parity
• Event synchronization (HET transfer requests)
• Support 32 or 64 bits transaction
• Addressing modes for HET address (8 byte or 16 byte) and system memory address (fixed, 32 bit or 64bit)
• Each type of interrupt can be routed to either two different host CPUs
• One shot, circular and auto switch buffer transfer modes
• Request lost detection

52
LAB2: Using NHET as GIO

53
Overview
• In this project we will:– Create our first HALCoGen Project– Generate and Import code into Code Composer Studio– Write code to turn on the LED on HET pin 1– Build and Deploy our code to the microcontroller

54
Setting up a New HALCoGen Project
• Launch HALCoGen– Start > Programs > Texas Instruments > HALCoGen
• File > New > Project• Family:
– TMDX570• Device:
– TMDX570LS20USB• Name: Exercise• Location: “C:\myWorkspace”

55
The Interface

56
Configuring the Peripherals
• Select the peripherals that are required for this project.– In this lab we need only enable the GIO driver, uncheck all other drivers
• No further changes should be made, the source code can now be generated.– To do this go to File > Generate Code– Following, the folders on the right will populate with our new files

57
HALCoGen Help• Information about the files
and functions that HALCoGen creates can be found in the HALCoGen ‘Help’ menu
• Help can be launched from the main title bar under Help -> Help Topics

58
Setting up Code Composer Studio 4 (CCS4)
• Launch CCS4– Start > Programs > Texas Instruments > Code Composer Studio v4 >
Code Composer Studio v4• When it launches, CCS will ask you to select a workspace, we will chose
“C:\myWorkspace”• Once it loads, go to File > New > CCS Project

59
Setting up our Project
• Our project name needs to match the name of our HALCoGen Project, Exercise
• Then Click “next”• On the next page, make
sure that your projecttype is set to ARM andDebug and Release areboth checked
• Then Click “next”

60
Setting up our Project (cont.)
• We are not using any referenced projects so click “next” again

61
Setting up the Project (cont.)
• Lastly, set the Device Variant to “Cortex R” and TMS570LS20216SPGE
• Click “Finish”

62
Getting Started
• On the left hand side in the “C/C++ Projects” exploer, open “sys_main.c”• When ever you generate code in HALCoGen, the program overwrites user
code, except specific sections marked by “USER CODE BEGIN (x)” and “USER CODE END”– For code placement we will be referring to the number within the User
Code block
/* USER CODE BEGIN (0) *//* USER CODE END */

63
Writing the Code
• Inside User Code 1, copy the code below.
• Then in User Code 3, copy the code below.
/* USER CODE BEGIN (1) */#include "het.h"/* USER CODE END */
/* USER CODE BEGIN (3) *//* Set HET port pins to output */gioSetDirection(hetPORT, 0xFFFFFFFF);
/* Set HET port pin 1 high */gioSetBit(hetPORT, 1, 1);
/* Infinite loop */while(1);
/* USER CODE END */

64
Notifications
• Lastly we must insert a function that would be called if interrupts were enabled. Without these, the code will fail to build
/* USER CODE BEGIN (4) *//* GIO Notification function not used, but required by compiler */void gioNotification(int bit){
return;}/* USER CODE END */

65
Compiling the Project
• The code is now complete and we are ready to build our project.– Go to Project > Build Active Project
• Now that we have our .out file, we need to program the microcontrollers Flash memory.

66
Creating a Target Configuration
• Before we begin, we must make a new target configuration, this tells CCS4 what device this project is designed for.– Target > New Target Configuration
• A new window will appear, we will make our file name “TMS570.ccsxml”• Click Finish

67
Creating a Target Configuration…
• A new tab will appear with a list of emulators and devices.– Connection: Texas Instruments XDS100v2 USB Emulator– In the text box labeled “Type Filter Text”, type “TMS570”.
• This will narrow the search down to just TMS570 devices, select TMS570LS20216SPGE
– Click “Save” on the right

68
Flash Programming Configuration• It is possible to make the flash programming process much faster
by only the necessary erasing and programming the necessary regions of flash memory.– To do so go to Tools > On-Chip Flash
• If ‘On-Chip Flash’ option is not available, select Target > Launch TI Debugger. Then go to Tools > On-Chip Flash
– In the window that appears on the right, under Erase Options, check “Necessary Sectors Only (for Program Load)”

69
Programming the Flash
• We are now ready to program the flash.– Go to Target > Debug Active Project– A new window should appear as it programs the flash memory.
• This may take a few moments.

70
Testing our Program
• Click the green arrow on the debug tab to run our program
– Alternatively the program can be run without the debugger connected by
• Clicking the red square on the debug tab to terminate the debugger’s connection
• Hit the reset button on the board and the NHET[1] LED should illuminate.
• Congratulations! You have completed the lab.

71
TMS570LS: Multi-Buffered Serial Peripheral Interface (MibSPI)

72
SPI / MibSPI Features
• The SPI / MibSPI has the following attributes:– 16-bit shift register
Receive buffer register– 8-bit baud clock generator
Serial Clock (SPICLK) I/O pin– Up to 4 Slave in, Master out (SPISIMO) I/O pins for faster data transfers – Up to 4 Slave out, Master in (SPISOMI) I/O pins for faster data transfers– SPI Enable (SPIENA) I/O pin (4 or 5-pin mode only)– Slave Chip Select (SPISCS[7:0]) I/O pin (4 or 5-pin mode only)
• The SPI / MibSPI allows software to program the following options:– SPISOMI / SPISIMO pin direction configuration– SPICLK pin source (external/internal)– MibSPI pins as functional or digital I/O pins

73
• For each Buffer, following features can be selected from 4 different combinations of Formats using the control fields in the buffer:
– SPICLK frequency ([VBUSPCLK]/2 through /256)
– Character length (2 to 16 bits)
– Phase (delay/no delay), Polarity (high or low)
– Enable/Disable Parity for transmit & receive
– Enable/Disable timers for ChipSelect Hold & Setup timers
– Direction of shifting, MSBit first or LSBit first
– Configurable Parallel modes to use multiple SIMO/SOMI pins
SPI / MibSPI Features

74
SPI / MibSPI Features
• In Multibuffer Mode (uses the Multibuffer RAM (up to 128 Buffers)), in addition to the above, many other features are configurable:
– Number of buffers for each peripheral (or data source/destination) or group (up to 8 transfer groupings)
– Number of DMA controlled buffers & number of DMA request channels (up to 8 for each of transmit & receive)
– Triggers for each groups, trigger types, trigger sources for individual groups (up to 14 external trigger sources & 1 internal trigger source)
– Number of DMA transfers for each buffer (up to 65536 for up to 8 buffers)
– Un-interrupted DMA buffer transfer (NOBREAK buffer)

75
SPI / MibSPI Additional Features
• Multibuffer RAM Fault Detection (MibSPI only): – Parity circuit to detect memory faults
• SPI / MibSPI Multiple Chip Select (Master only):– The SPI / MibSPI supports multi chip select (multiCS) modes
• SPI / MibSPI Internal Loop-Back Test Mode (Master only):– To test the SPI / MibSPI transmit path and receive path including the buffers and the parity
generator• SPI / MibSPI Transmission continuous self-test (Master/Slave):
– During data transfer SPI / MibSPI compares its own internal transmit data with its transmit data on the bus
• SPI / MibSPI Variable Chip Select Setup and Hold Timing (Master only): – To support slow slave devices a counter can be configured to delay the data transmission after
the chip select is activated• MibSPI Lock transmission (Multibuffer mode Master only):
– To enable consecutive transfer without being interrupted by another higher priority group transfer
• SPI /MibSPI Detection of Slave de-synchronization (Master only)• SPI / MibSPI ENA Signal Time-out (Master only):
– To avoid stalling the MibSPI by a non-responsive slave device• SPI/MibSPI Data Length Error:
– To detect any mismatch in length of received/ transmitted data with the programmed character length
• Modulo Count Parallel Mode (Optional mode):– Special parallel mode to accommodate some specific slave devices

76
Standard SPI Mode - Block DiagramVBUS Write VBUS Read
TX SHIFT REGISTER
TX BUF
RX BUF
nSPISCS[7:0]
nSPIENA
SPICLK
SPISIMO SPISOMI Pre
scal
e
Clo
ck P
olar
ity
Clo
ck P
hase
CLKMOD
ModeGeneration
Logic
DMA REQ EN
RX_DMA_REQ
RXOVRN
RXEMPTY
SPI BUF
SPI CLOCK GENERATION LOGIC
VBUS Clock
INT_LVL
RXOVR INT ENA
RX INT ENA
TX INT ENA
Kernel FSM
DMA REQ EN
TXFULL
RX SHIFT REGISTER
16
16 16
SPIDAT0 SPIDAT1
16
CHARLEN
TX_DMA_REQ
16
16
INT_REQ0
INT_REQ1

77
MibSPI Multibuffer Mode - Block DiagramVBUS
TX SHIFT REGISTER
Multibuffer Control
nSPISCS[7:0]
nSPIENA
SPICLK
SPISIMO SPISOMI Pre
scal
e
Clo
ck P
olar
ity
Clo
ck P
hase
CLKMOD
ModeGeneration
Logic
DMAREQ[15:0]
Ctrl Field
SPI CLOCK GENERATION LOGICVBUS Clock
Kernel FSM
RX SHIFT REGISTER CHARLEN
16
Sequencer FSM
SPIBUF Status
1616 16
16
16
InterruptGenerator
DMA CONTROL LOGIC
Trigger CONTROL LOGIC
CrtlField
TXBuffer
StatField
RXBuffer
Multibuffer RAM
16
Tick Counter
TRG_SRC[13:0]
2
INTREQ[1:0]
SPI Kernel
Multibuffer Logic

78
MASTER SLAVE
(MASTER = 1 ; CLKMOD = 1) (MASTER = 0 ; CLKMOD = 0)
SPIDAT1 SPIDAT0
MSB LSB MSB LSB
WRITE TO SPIDAT1
SOMI
SIMO
SOMI
SIMO
SPICLK SPICLK
nSCS[7:0] nSCS
nENABLE nENABLE
WRITE TO SPIDAT0
SPICLK
SIMO
SOMI
WRITE TO SPIDAT0 (SLAVE)
nENABLE
WRITE TO SPIDAT1 (MASTER)
nSCS
Transfer Mode - Five Pin Option:Hardware Handshake

79
SPI / MibSPI Data Formats
• Data word length must be programmed in master mode and in slave mode
• For words with fewer than 16 bits Data must be right-justified when it is written to the MibSPI for transmission irrespective of its character length or word length
• The figure below shows how a 12-bit word (0xEC9) needs to be written to the transmit buffer in order to be transmitted correctly:
• The Received data is always stored right justified irrespective of the character length or direction of Shifting and is padded with leading ‘0’s when character length is less than 16.
• SPI / MibSPI supports automatic right-alignment of receive data independent from shift direction and data word length
• 2 consecutive accesses to the same slave are possible
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
01 1 1 1 1 0 0 1 0 0 1x x x x

80
CLOCK POLARITY = 0, CLOCK PHASE = 0
WRITE SPIDAT
SPICLK
SPISIMO
SPISOMI
SAMPLE INRECEPTION
MSB D6 D5 D4 D3 D2 D1
D0
LSB
D6 D5 D4 D3 D2 D1D7
CLOCK PHASE = 0 (SPICLK WITHOUT DELAY)
- DATA IS OUTPUT ON THE RISING EDGE OF SPICLK- INPUT DATA IS LATCHED ON THE FALLING EDGE OF SPICLK- A WRITE TO THE SPIDAT REGISTER STARTS SPICLK
1 2 3 4 5 6 7 8
Clock Options

81
Multibuffer RAM
• Size depends on the implementation– Number of buffers: 0..127
• Divided into different groups with individual configuration
• For each group a trigger event can be chosen
– One shot or continuous option– Trigger event conditions can be
set up (e.g. rising edge)
• Up to 15 trigger sources are available– External events, tick counter,
buffer array management
• Interrupt generation – Upon finishing transfer group– Suspend (provide new data or
consume received data)
Buffer 0Buffer 1
Buffer 17
Buffer 18
Buffer 31
Buffer 32
Buffer 63
Transfer group0 :18 buffersPSTART0 = 0
Transfer group1 :14 buffersPSTART1 = 18
Next (3rd) transfer group
OR (if last possible transfer group is used)
LPEND = 32
Buffers 32 .. 63 are unused or undefined
Example for a 32 buffers dual transfer group (64buffer RAM size)

82
SPI / MibSPI Parallel Mode
• In order to achieve higher data flow, the parallel mode of the SPI / MibSPI enables the module to send data over more than one data line (Parallel 2, or 4).
• Figure of Parallel Mode with Shift register MSB first:
• Notes: – When parallel mode is used, the data length must be set as 16 bits– If parity is enabled one additional SPICLK will trigger the parity bit transfer
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SO
MI7
SO
MI6
SO
MI5
SO
MI4
SO
MI3
SO
MI2
SO
MI1
SO
MI0
SIM
O7
SIM
O6
SIM
O5
SIM
O4
SIM
O3
SIM
O2
SIM
O1
SIM
O0
MULTIPLEXER
DEMULTIPLEXER
PSIMO[7:0]
SOMI[7:0]
Parallel Mode
Shift Register as inSPI / MibSPI

83
tC2TDELAY = (C2TDELAY / VCLK) + 2
tC2EDELAY = (C2EDELAY / SPICLK)
tT2CDELAY = (T2CDELAY / VCLK) + 1
Timing Setup – Delay Register (SPIDELAY)
SCSx
ENAx
SPICLK
VBUSPCLK
SOMI
tT2EDELAY = (T2EDELAY / SPICLK)
CSHOLD = 1 (held active/ dotted line) CSHOLD = 0 (set CS high after transmission)
WDELAY
DATA

84
TMS570LS: Controller Area Network (DCAN)

85
DCAN Architecture• Full CAN according to protocol
version 2.0 part A, B• CAN Core
– handles all CAN protocol functions
• Message Handler– controls data transfer
between CAN Core, Message Interface registers and RAM
– handles acceptance filtering and interrupts
• Message RAM– 64 mailboxes (DCAN 1&2)– 32 mailboxes (DCAN 3)
• Registers and Message Object access (IFx)
– Status and configuration registers for module setup and indirect Message Object access through interface registers (IFx)
• Module Interface– 32-bit interface to VBUS
clock domain
DCAN
MessageRAM Interface
Module Interface
CAN Core
Message Handler
Registers & MO access
CTRL VBUSP
CAN_TX
MessageRAM
(8, 16 or 32 bit)INT requests DMA requests
VCLKA
CAN_CLK
CAN_RXVCLK
Test Modes only

86
DCAN Features Overview
• Full CAN according to protocol version 2.0 part A, B• Standard and Extended Identifiers• Programmable Bit Timing, Bit rates up to 1 MBit/s• Up to 64 Message Objects (MO) / Mailboxes• Identifier Masks for each Message Object• Programmable FIFO mode for Message Objects• Dual clock feature• Possible automatic retransmission of a frame in case of lost arbitration or
error• Bus diagnostic: Bus off, Bus error passive, Bus error warning, Bus stuck
dominant• Frame error report: CRC, Stuff, Form, Bit and Acknowledgement errors• Programmable loop-back modes for self-test operation• Suspend modes for debug support• Parity check mechanism for all RAM modules

87
TMS570LS: FlexRay Controller

88
FlexRay Block Diagram
• FTU: FlexRay Transfer Unit
• IBF: Input Buffer
• OBF: Output Buffer
• INT: Interrupt Control
• TBF A/B: Transient Buffer RAM
• PRT A/B: FlexRay Channel Protocol Controller
• GTU: Global Time Unit
• SUC: System Universal Control
• FSP: Frame and Symbol Processing
• NEM: Network Management

89
FlexRay Key Features
• Open Bus System
• Support of redundant transmission channels
• Data rate of 10 Mbit/sec per channel
• Support of a fault tolerant synchronized global time base
• Static and dynamic data transmission (scalable)– Deterministic data transmission– Arbitration free transmission
• Fault tolerant and time triggered services implemented in hardware
• Support of optical and electrical physical layers

90
FlexRay on TMS570LS (1/2)
• Bosch FlexRay Core (E-Ray)
• Conform to FlexRay Protocol Specification V2.1
• Data rates of up to 10 Mbit/s on each of the 2 channels
• 8 Kbyte of Message RAM for storage of– 128 message buffers with max. 48 byte data section or – 30 message buffers with 254 byte data section– Different payload lengths possible
• Parity Protection of Message RAM
• Message Handler controls– Message RAM access arbitration– Acceptance Filtering– Maintaining the transmission schedule– Providing status information

91
• Each message buffer can be configured as – Receive buffer – Transmit buffer
• Each message buffer can be assigned to – Static segment of the Communication Cycle– Dynamic segment of the Communication Cycle– Part of a receive FIFO
• Direct CPU access to message buffers via input and output buffers
• Dedicated Transfer Unit (DMA-like) for automatic data transfer to and from message buffers without CPU interaction
• Filtering for frame ID, channel ID and cycle counter
• Maskable module interrupts
• Network Management supported
FlexRay on TMS570LS (2/2)

92
FlexRay Communication Structure
staticsegment
dynamicsegment
symbolwindow NIT static
segmentdynamicsegment
symbolwindow NIT
payloadhea der trailer CID payloadhea
der trailer CID
the payload length can vary
slot 1 slot 2 slot 3 … slot m-1 slot m
m + 1
m + 2
m + 3
dynamicslot m+4
m + 5
m + 6
dynamicslot 7
.
.
.
m + x
Cycle [n] Cycle [n+1] Cycle […]

93
FlexRay Communication Cycle
Static Segment Dynamic Segment

94
FlexRay Message Frame Format

95
FTU Data Transfer Scheme
FTUTCR
TBAC
ontro
l
VBUS
Data RAM
Array ofStruct { Header, Payload }
CPUMessage RAM
FlexRay
Header Partition
Data (Payload)Partition
FlexRay Core
Prot
ocol
Con
trol
ler
Stat
e M
achi
ne
Flex
Ray
Bus
Trigger Event Trigger
Interrupt

96
FlexRay Transfer Unit Key Features
• Data Transfer without CPU interaction– From FlexRay Message RAM to Data RAM (Read) – From Data RAM to FlexRay Message RAM (Write)
• Transfer Types– data and header section– header section only– data section only
• Transfer Configuration RAM (with Parity)– Configures the transfer sequence– Parity protection
• Triggers to Start a Transfer– CPU driven (single transfer sequence)– Event driven (single or continuous transfer sequence)

97
FlexRay Transfer Unit Key Features…
• Different Transfer Conditions– If the status flags (header section) of the respective
message buffer has been updated – If the data section of the respective message buffer has
been updated– Always
• Maskable interrupt generation when Message Buffer transfer is finished
• Memory Protection Unit– One memory section (start- and end address) can be
defined– No memory section is setup after reset

98
TMS570LS: Local Interconnect Network (LIN)

99
Typical LIN Applications
Rear Door Lock, window
Mirror
Mirror
BCM Gateway
Passenger´s Door Lock, window
Driver´s Door Lock, window
Fan
Damper
Door Control
Light
Light
Levelizer
Levelizer
CompressorCAN
Climate Control
Wipers
Dashboard
Rear Wiper
Sun Roof
Driver´s Seat
Steering wheel
Rear Door Lock, window

100
LIN Communication Concept
• Single Master concept with max. 16 nodes in one LIN cluster• LIN supports baud rates from 1 to 20KHz• Single wire low cost bus system often used as a sub network to comfort CAN.

101
LIN Message Frame
MASTER
• Synch break signalling beginning of a new message
• Synch field: 0x55• ID Field:
ID 0x00 to 0x3F (0 to 63)• Diagnostics:
ID 0x3C (master request) ID 0x3D (slave response)
• User Defined: ID 0x3E
SLAVE
• Response with 0 to 8 data fields
• Checksum field – classic CS LIN1.3
– over data bits only – enhanced CS LIN2.0
– over data bits and the protected identifier
SDEL1..4 Tbit
SYNCH BREAK13 + (0..7) Tbit
SYNCH FIELD10 Tbit
ID FIELD10 Tbit
STAR
T BI
T
STO
P BI
T
01010101
STA
RT
BIT
STO
P B
IT
STAR
T BI
T
STO
P BI
T
STAR
T BI
T
STO
P BI
T
Data FIELD10 Tbit
STA
RT
BIT
STO
P BI
T
Checksum FIELD10 Tbit
P0 P1

102
• Compatible with LIN 1.3 or 2.0• LIN 2.0 Master Compliant • HW LIN protocol handler
– Multi-buffered receive and transmit units
– Automatic checksum generation and validation
– ID masks for message filtering
– DMA capability• Synch break detection• Slave automatic synchronization• Optional baud rate update• Synchronization validation• Automatic bit monitoring• Automatic error detection• SCI (UART) mode
– Max 3.125Mbps with 100MHz VCLK
BLIN
SCI
8 RECEIVE BUFFERS
8 TRANSMIT BUFFERS
INTERFACE
DMA CONTROL
READ DATA BUS
WRITE DATA BUS
LINRX
LINTX
SCICLK
ADDRESS BUS
MASK FILTERS
SYNCHRONIZER
COUNTER
TIMEOUT CONTROL
COMPARE
FSM
TXRX ERROR DETECTOR
(TED)
CHECKSUM CALCULATOR
BIT MONITOR
ID PARITY CHECKER
LIN Key Features

103
Write Data to Write Data to TX BufferTX Buffer
LIN Module
Process Error Process Error InterruptInterrupt
Application Software
Sync Break is generatedSync Break is generatedSync Field is generatedSync Field is generatedIdentifier is transmittedIdentifier is transmitted
TX BufferTX Buffer
Transmit DataTransmit Data
TXRDY Flag is set after TXRDY Flag is set after complete message is complete message is transmittedtransmitted
Error Flag is setError Flag is set
orProcess other taskProcess other task
Write identifier to Write identifier to ID registerID register
• Application software handles the preparation of transmitted data and starts the transmission with writing the ID.
LIN: Master Transmission
Right identifier receivedRight identifier received
Yes

104
Write identifierWrite identifierto ID registerto ID register
LIN Module
Process Error Process Error InterruptInterrupt
Application Software
Process other tasksProcess other tasks
Sync Break is generatedSync Break is generatedSync Field is generatedSync Field is generatedIdentifier is transmittedIdentifier is transmitted
Received DataReceived Data
RRX BufferX Buffer
RXRDY Flag is set after RXRDY Flag is set after complete message is receivedcomplete message is received
Error Flag is setError Flag is set
or
Right identifier receivedRight identifier received
Yes
LIN: Master Reception
• Application software starts the transmission with writing the ID and handles the received data.

105
• Programmable Frame Format1 Start Bit1 to 8 Data Bits0 or 1 Address Bit0 or 1 Parity Bit1 or 2 Stop Bits
• Asynchronous Communications Format• 2 Multiprocessor Modes with Wake-up Capability
Idle-Line Mode; Address-Bit Mode• Programmable Baud RatE
– more than 16 700 000 different Baud Rates• Error Detection
– Parity, Overrun and Framing Error– Break Detect
• Noise Protection Capability• Double-buffered Receive and Transmit Function
TMS570 LIN – SCI Mode Features

106
LAB3: PC Communication Using SCI

107
Overview
• In this project we will:– Edit our existing HALCoGen project to setup the SCI module– Write code that prompts the user to enter a characters which are echoed
in the PC terminal

108
Enabling the SCI Module
• Reopen the HALCoGen project• Go back to the ‘Driver Enable’ tab.
– For this lab we will be using the SCI and GIO modules
• Click the ‘VIM Channel 0-31’ tab

109
Enabling the SCI Interrupt
• On this page you will see two subgroups– The left group lists all available interrupts– The right group allows you to enable these
interrupts• Match the displayed setting below to enable the
LIN1/SCI1 High interrupt

110
Configuring the SCI Peripheral
• On the top bar of the ribbon click “SCI1”• Now that we have enabled the interrupt, we need to tell the device when to
interrupt.– For this lab we will select the “RX INT”, so that an interrupt is generated
whenever the SCI receives data

111
Regenerate our Code
• All of the setting for this project are complete.• We will need to regenerate our code to apply the new settings.
– File > Generate Code• As long as you typed all of your custom code inside the USER CODE
blocks, then you will not lose any code.• Once this is complete reopen your project in Code Composer Studio

112
Communicating with the SCI Module
• In Code Composer Studio, insert the following into User Code 1 in the C/C++ perspective
• This will include the SCI header file as well as creating a variable that can later be used for storing received SCI characters
/* USER CODE BEGIN (1) */#include "het.h"#include "sci.h"
/* Stores user character */static unsigned char command;
/* USER CODE END */

113
Initializing the Modules• Insert the following into User Code 3
/* USER CODE BEGIN (3) *//* Enable IRQ */_enable_IRQ();
/* Initialize SCI module */sciInit();
/* Set HET port pins to output */gioSetDirection(hetPORT, 0xFFFFFFFF);
/* Set HET port pin 1 high */gioSetBit(hetPORT, 1, 1);
/* Send user prompt */sciSend(sciREG1, 21, (unsigned char *)"Please press a key!\r\n");
/* Await user character */sciReceive(sciREG1, 1, (unsigned char *)&command);
/* Infinite loop */while(1);
/* USER CODE END */

114
Handling SCI Interrupts
• Lastly, insert this block into User Code 4 before the gioNotification
• Each interrupt on the microcontroller will respond by calling a notification function in which you tell the TMS570 how to respond.
/* USER CODE BEGIN (4) *//* Notification called upon reception of character */void sciNotification(sciBASE_t *sci, unsigned flags){
/* Echo received character */sciSend(sci, 1,(unsigned char *)&command);
/* Await further character */sciReceive(sci, 1,(unsigned char *)&command);
}

115
Building and Deploying the Code
• The coding segment for this project is now complete, go ahead and build your project and then program it to the flash.

116
Testing your code
• Upon Completion open the TMS570 console or preferred terminal program.• Ensure the following properties
– Baud rate: 9600– Data bits: 8– No parity, 2 Stop bits
• Click the ‘Terminate All’ box in CCS then hit reset on the board.• You should now see the ‘Please press a key!’ prompt in the console window.• When a character is typed, the microcontroller will ‘echo’ the character back to
the terminal program.

117
TMS570LS: External Memory Interface (EMIF)

118
EMIF: Block Diagram

119
EMIF: Main Features
• Interfaces to asynchronous memories
• 4 addressable chip selects of up to 16MB each
• 16-bit data bus width
• Programmable cycle timings
• Select strobe mode
• Extended wait mode
• Data bus parking
• Allows overlay of up to 4MB of on-chip flash to external memory via Parameter Overlay Module (POM)

120
TMS570LS: Multi-Buffered ADC (MibADC)

121
MibADC Block Diagram
CONTROL AND STATUSSEQUENCER
ADIN31..........
ADIN0
VrefLO VrefHI VSSA VCCA
Chnsel Swtsel(Test / Cal)
ConversionGroup
Selection
ADEVT
Interruptrequests
PERIPHERAL BUS (VBUS)16
Internal Event 1
Internal Event 7
Event Logic EVENT
GROUP1EVENTFIFO
GROUP1FIFO
GROUP2FIFO
Result Formatting- Channel ID mask- 8/10/12 bit mode mask
DMArequests
3
DMA requests
32:1
Mul
tiple
xer
GIO Control
5
.
.
InterruptThreshold+ counters
EVENT,GROUP1GROUP2
3
Calibration &Error
Correction
Ctrl Chn
ADC RAM
w/ Parity
GROUP2
w/ Autoinitializationw/ RAM Test
Self-test& Calibration
Sample Cap
Discharge
10bit / 12bitAnalog – Digital Converter
(successive approximation)
CAP Dis. FIFO empty
ADCL K
6 Magnitude Threshold Interrupt Sources
5
Prescaler
5VCLK

122
• Configurable 10-bit or 12-bit resolution• Up to 24 channels (8 Shared Channels)• Sequential multi-channel conversion in ascending order• Two conversion modes
– Single conversion– Continuous conversion
• Three conversion groups w/ programmable sample and acquisition times– Two software- or event-triggered conversion groups: Group1 and Group2– One event-triggered-only conversion group: Event Group
• Three size adjustable memory regions– Channel identifier stored with conversion result
• Up to 8 event trigger options• Enhanced interrupt capability w/ programmable interrupt threshold counter• DMA request generation capability• Power-down mode• Embedded self-test & calibration• External event pin (ADEVT) can be programmed as general-purpose I/O
MibADC Main Features

123
MibADC Operation Modes
• Conversion mode– normal active mode for converting the selected external
input voltage
• Sample Capacitor Discharge mode– active mode that grounds the ADC sampling capacitor
• Calibration mode– special active mode for calibration using internal
reference voltages
• Self-test mode– active mode for failure-detection using internal reference
voltages
• Power-down mode– inactive mode in which the ADC internal clock is stopped

124
MibADC Conversion Groups
Event group select (ADEVSEL)
Event group FIFO
12 value8 value
read
ADEVBUFFER
ADG1SEL ADG2SEL
Input Channel Select Registers
Group 1 FIFO
9 value 3 value
Group 2 FIFO
read
ADG1BUFFER
read
ADG2BUFFER
31 0 31 0 31 0
11 1 1

126
MibADC Interrupts
• Conversion Group End Interrupt – All channels that are assigned to a particular group are converted
• Conversion Group Buffers Threshold Interrupt– Number of conversion results exceed threshold register value
• Conversion Group Buffers Overrun Interrupt – Number of ADC conversions exceed the number of buffers allocated
for that conversion group
• Magnitude Threshold Interrupt– Magnitude comparison of conversion result on up to six channels;
alternately, comparison can be made between the conversion result from another channel.
• Parity Error Interrupt– Parity error following a read from the ADC RAM

127
TMS570LS Support Structure

128
TMS570 Support Structure
• TMS570 Web Page: www.ti.com/TMS570– Data Sheets– Technical Reference Manual– Application Notes– Software & Tools Downloads and Updates– Order Evaluation and Development Kits
• TMS570 Forum: http://e2e.ti.com/support/microcontrollers/tms570/default.aspx
– News and Announcements – Useful Links– Ask Technical Questions– Search for Technical Content
• TMS570 WIKI: • http://processors.wiki.ti.com/index.php/TMS570
– How to guides– Intro Videos– General Information

129
TMS570 Microcontroller Forum Overview
• Forum Guidelines:– At least one person will monitor the forum at all times (work days)– All questions posted in the forum will have a response in 24hrs or less
Forum Flow:TMS570 Forum
TI E2E forum for questions about TMS570 devices
Answer Known ?
YES
Post Answer Within 24hrs
NO
Post ‘Question Received’ Confirmation Within
24hrs
Forward Question to World Wide
Team
World Wide Apps Team:-United States
- Europe-India
Post Answer

130
Thank You!Thank You!
Please fill out the TMS570 1 Day Training Class Survey