Embed Size (px)
Citation preview

Timeline-based Planning and Execution: Theory and Practice
- PLATINUm -A Novel framework for PLanning and Acting
with TImeliNes under Uncertainty
Alessandro Umbrico National Research Council of Italy (ISTC-CNR)

Outlinep General Introduction to PLATINUm
n History, general motivations and objectivesp PLATINUm Representation Capabilities
n Temporal Uncertainty, Components and Resolversp PLATINUm Deliberative Capabilities
n Pseudo-controllability aware planning and hierarchical approachp PLATINUm Executive Capabilities
n Closed-loop control approach and controllability issuesp PLATINUm in Action
n Human-Robot Collaboration in realistic manufacturing scenarios1

GENERAL INTRODUCTION TO PLATINUM
2

A Brief History of PLATINUm
3
HSTS[Muscettola et al. 1994]
APSI-TRF[Cesta et al. 2008]
APSI-GOAC[Fratini et al. 2011]
EPSL[Umbrico et al. 2015]
PLATINUm[Umbrico et al. 2017]
Formalization of Timeline-based Approach with Temporal Uncertainty and Resources
[Cialdea et al. 2016] + [Umbrico et al. 2018]
PLATINUm+ Resources
[Umbrico et al. 2018]

Motivations and Objectivesp Several timeline-based systems successfully applied in practice
n E.g., EUROPA2, ASPEN, IxTeT, APSI-TRF
p Lack of uniform formal interpretation of the main concepts n E.g., different interpretation of timelines, domain rules, plans and solutions
p Lack of a uniform approach to planning and execution with timelinesn E.g., different approaches to solving and modeling problems with timelines
p Lack of representation of uncertainty and uncontrollable dynamics
4

Framework Capabilitiesp A software framework capable of dealing with planning and
execution of timelines under temporal uncertaintyn Comply with the formalization proposed in [Cialdea et al. 2016]
p Synthesize timeline-based plans with some desired controllability propertiesn E.g., pseudo-controllability
p Execute timelines by dealing with the dynamics of the uncontrollable features of the environmentn The controllability problem [Morris, Muscettola and Vidal 2001]
5

Architectural Overview of the Framework
Deliberative
Planner
Strategy Solver Heuristics
Representation
PlanDatabase
DomainComponent
Resolver
TemporalDatabase ParameterDatabase
Executive
Executive
Monitor Clock Dispatcher
ExecutivePlanDatabaseManager
6

A Layered Architecture for PLATINUmp The Representation Layer is responsible for providing the basic
functionalities needed to manage timeline-based plansn Encapsulate data structures and algorithms needed to build valid timelines
p The Deliberative Layer is responsible for solving planning problems by synthesizing timeline-based solution plansn Encapsulate heuristics, strategies and algorithms needed to build plans
p The Executive Layer is responsible for executing timelines by scheduling flexible tokens over timen Encapsulate dispatching and monitoring algorithms to dynamically adapt
timelines during execution, according to the received feedbacks 7

GOING DEEP INTO REPRESENTATION CAPABILITIES
8

Plan Database Overall Structure
9

Plan Data Representation and Managementp Temporal information is managed through Temporal Networks
n Framework enabling temporal inference and consistency checking [Dechter et al. 1991]
p Simple Temporal Network with Uncertainty (STNU) to manage uncontrollable durations
p Controllability check [Morris, Muscettola and Vidal 2001]
p A “standard” CSP solver is encapsulated to manage variable assignment and constraint propagationn Choco CSP solver
10

Resolvers and Componentsp Domain components are data structures that model the features
of a planning domain that must be controlled over timen Each feature has its own constraints that must be satisfied to generate
valid timelines i.e., temporal behaviors without flaws
p Resolvers represent specialized algorithms capable of detecting flaws and computing possible solutionsn Each resolver encapsulates the logic for handling a particular type of flaw
p PLATINUm provides a set of ready to use components and resolvers representing the typical features that compose a timeline-based planning domain
11

State Variablesp Components that comply with
the proposed formalizationn Encapsulate values, durations,
controllability tags and transition constraints
p Resolvers are provided to synthesize timelinesn Schedule state variable tokensn Synthesize complete sequences
of tokens enforcing transition constraints
12

Discrete and Reservoir Resourcesp Components encapsulate
resource constraints and resource events according to the tokens of the timelines
p Resolvers provide the logic for detecting and solving peaksn Compute pessimistic and
optimistic resource profilesn Compute peak solutions through
Minimal Critical Sets (MCSs)p Planning & Scheduling integration 13

The Plan Databasep Encapsulating all the domain
components and configurationsn Composite design patternn Provide a public interface to
domain features and data
p Leverage internal components to detect planning goalsn Planning goal solutions computed
through synchronization rulesn Apply expansion or unification
14

GOING DEEP INTO DELIBERATIVE CAPABILITIES
15

Detailed Structure of a PLATINUm Planner
16

Pseudo-controllability Aware Solvingp General plan refinement search procedure
n Iteratively refine an initial partial plan by solving flaws, until a valid plan without flaws is found
n Search decision point: which partial plan to select for search space expansion
n Flaw decision point: which flaw to solve for plan refinement
p Pseudo-controllability check as a special flaw of the plann Verify if the flexible durations of the uncontrollable tokens have been
modified with respect to the domain specificationn Pseudo-controllability is a necessary but not sufficient condition for
dynamic controllability 17

Hierarchical Flaw Selection Heuristicsp Analyze synchronization rules
to extract dependencies among state variables and their valuesn Extract a hierarchy if possiblen Domain-independent heuristics
p Leverage the extracted hierarchy to evaluate flaws and decide which flaw to solve nextn Support flaw decision point
18
Functional variables
SVA
SVB SVC
Primitivevariables
SVD SVE
SVA
SVB
SVC
SVD
SVE

Search & Build Plan Synthesisp Search phase aims at constraining temporal behaviors as much
as possiblen Interleave planning and scheduling decisions by reasoning on flawsn Constraint state variables behaviors according to synchronization rules
and resource constraints - generated behaviors are not timelines yet
p Build phase aims at finalizing timelines by enforcing semantics defined by the formalizationn Synthesize valid timelines according to the constrained behaviors of
state variables generated by the search phasen Backtrack by jumping-back to the search phase in case of failures
19

Defining and Using a PLATINUm Planner
20

GOING DEEP INTO EXECUTIVE CAPABILITIES
21

Detailed Structure of a PLATINUm Executive
22

Closed-loop Execution of Timeline-based Plansp A PLATINUm executive consists of a closed-loop control
process which iteratively fix flexible timelines over time
p A Dispatcher actually executes the timelines of a plan by sending commands to a physical systemn It is responsible for deciding the start of the execution of the tokens that
compose the timelines of a plan
p A Monitor handles execution feedbacks to verify whether the plan complies with the observed status of the environment or notn It is responsible for propagating information about the actual duration of
uncontrollable tokens23

Executing Timelines under Temporal Uncertaintyp Extract start/end execution
dependencies by analyzing temporal relations of a plann Dynamically generate a
execution dependency graph
p Manage token transitions according to their controllability propertiesn Different controllability properties
entail different dispatching policies
waiting
in-execution
c
executed
c
controllable
waiting
in-execution
c
executed
u
partially controllable waiting
starting
c
in-execution
u
executed
u
uncontrollable
24

Closed-loop Control Architecture
Deliberativebuffered
planned
FailureManager
Executive
Dispatcher Monitor
failureexecuted
re-planning
System/ROS-basedSimulator
send command feedback feedbacksend command
25

HUMAN-ROBOT COLLABORATION CASE STUDY
26

The FourByThree Research Projectp Horizon 2020 research project
n Call FoF-06-2014 “Symbiotic Human-Robot Collaboration for safe and dynamic multimodal manufacturing systems”
n Coordinated by FUNDACION TEKNIKER (Spain)n http://fourbythree.eu/
27

Objectives of the Projectp Develop a new generation of modular industrial robotic solutions
that are suitable for efficient task execution in collaboration with humans in a safe way and are easy to use and programn Vision: A system integrator (or end-user) can create its own custom robot
according to their application needs (“kit” of hardware and software components)
p Real-world Pilot case studies to test Human-Robot Collaborationn ALFA, WOLL, STODT, PREMIUM
28

ALFA: A Collaborative Assembly Case Studyp Investment Casting process
n Dies are assembled and disassembled manually
n Some operations need human dexterityn Others can be done by a robot
p Re-design the process by taking into account an HRC perspectiven Hierarchical process descriptionn Three levels: Supervision, Coordination,
Implementation29

A Hierarchical Planning Model for Collaborative Assembly Scenarios
Robot’smotiontasks
Human’sassignedtasks
30

Flexible Collaboration with Dynamic Trajectory Selection
Verify the capabilities of an integrated task and motion planning control to improve the efficiency of HRC assembly processes
31

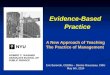
Experimental Results
257
225
195171 169 172
0%
10%
20%
30%
40%
50%
60%
70%
80%
50
100
150
200
250
300
0 1 2 3 4 5 6 7
ExecutionTIme[s]
ExecutionTime[s] SavedTime[%] RobotAllocatedTask[%]
Planning can reduce the duration of HRC processes and realize effective and safe collaborations between human operators and
robots [Pellegrinelli et al. CIRP Annals 2017] 32

Final Remarksp HRC is particularly suited to show the capabilities of PLATINUm
p Temporal uncertainty and hierarchical problem modeling and solving
p The FourByThree research project has shown the capability of PLATINUm to synthesize flexible and adaptable behaviors of a robot acting in the real-world
p Download PLATINUm from GitHub:https://github.com/pstlab/PLATINUm
33

CORRELATED PROJECTS AND FUTURE DEVELOPMENTS
34

KEEN– The Knowledge Engineering Environment for Timeline-based Planningp A knowledge engineering environment aimed at supporting the
design and development of timeline-based applicationsn Round-trip-engineering to support both graphical and programming user
interface to model timeline-based domainsn Available as plugin for the Eclipse IDEn https://ugilio.github.io/keen/
p Integrated with PLATINUm n Launch platinum-based planners on designed timeline-based domainsn Launch platinum-based executive to simulate execution of synthesized
plans35

Conclusions and Future Worksp PLATINUm is an open framework which can be “easily” extended
to introduce new representation features and solving capabilitiesn Discrete and Reservoir Resource management has been recently
introduced [Umbrico et al. ICAPS 2018]
p Future worksn Investigate new heuristics and new search strategiesn Integrate dynamic controllability checking algorithms n Comparison with other state of the art timeline-based and hybrid planners
p EUROPA [Barreiro et al., 2012], CHIMP [Stock et al., 2015], FAPE [Dvorak et al., 2014]
36

Thanks for your Attention!
37
PLATINUm – PLanning and Actingwith TImeliNes under Uncertainty
Available on GitHubhttps://github.com/pstlab/PLATINUm