Embed Size (px)
Citation preview
Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 1
Fourier Series Representation of Continuous-Time
Periodic Signals
Tik-61.140 / Chapter 3 2
Fourier Series Representation
• Focus on the representation of continuous-time and discrete-time periodic signals referred to as Fourier series
• Powerful and important tools for analyzing, designing, and understanding signals and LTI systems
Olli Simula
Tik-61.140 / Chapter 3 3
The response of LTI systems to complex exponentials
Representation of signals as linear combinations of basic signals that have the following properties:
1) The set of basic signals can be used to construct a broad and useful class of signals
2) The response of an LTI system to each signal should be simple enough in structure to provide us with the convenient representation for the response of the system to any signal constructed as a linear combination of the basic signals
Both of these properties are provided by the set of complex exponential signals in CT and DT
Olli SimulaTik-61.140 / Chapter 3 4
The response of LTI systems to complex exponentials
• The response of an LTI system to a complex exponential is the same complex exponential with only a change in amplitude:– Continuous-time: e sT -> H(s) esT
– Discrete-time: z n -> H(z) z n
where the complex amplitude factor H(s) or H(z) will be a function of the complex variable s or z
Olli Simula
Tik-61.140 / Chapter 3 5
The response of LTI systems to complex exponentials
• A signal for which the system output is a constant times the input is referred to as an eigenfunction of the system, and the amplitude value is referred as the eigenvalue of the system
• This property for complex exponentials can be shown using:– The impulse response and– The convolution
Olli SimulaTik-61.140 / Chapter 3 6
Continuous-Time Systems
• For an input x(t)=est the convolution integral gives:
∫∫+∞
∞−
−+∞
∞−
=−= τττττ τ dehdtxhty ts )()()()()(
∫∫+∞
∞−
−+∞
∞−
− == ττττ ττ dehedeeh sstsst )()(
∫+∞
∞−
−= ττ τdehtx s)()(
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 2
Tik-61.140 / Chapter 3 7
Continuous-Time Systems
• A complex exponential x(t)=est is now the eigenfunction of the LTI system with impulseresponseh(t):
sts esHdehtxty )()()()( == ∫+∞
∞−
− ττ τ
∫+∞
∞−
−= ττ τdehsHwhere s)()(
H(s) is the transfer function or system function representing the system behavior in the s-domain
Olli SimulaTik-61.140 / Chapter 3 8
Discrete-Time Systems
• For an input x[n]=zn the convolution sum gives:
∑∑+∞
−∞=
−+∞
−∞==−=
k
kn
kzkhknxkhny ][][][][ ∑
+∞
−∞=
−=k
kn zkhz ][
)(][)(][ zHnxzHzny n == ∑+∞
−∞=
−=k
kzkhzHwhere ][)(,
H(z) is the z-transform of the unit impulse responseH(z) describes the system behavior in the z-domain
Olli Simula
Tik-61.140 / Chapter 3 9
Linear Combination of Signals
• Let x(t) correspond to a linear combination of complexexponentials:
tststs eaeaeatx 321321)( ++=
• From the eigenfunction property the responseto each term:
tsts
tsts
tsts
esHaea
esHaea
esHaea
33
22
11
)(
)(
)(
333
222
111
→
→
→
Olli SimulaTik-61.140 / Chapter 3 10
Linear Combination of Signals• From the superposition property the response to the sum is
the sum of the responses:tststs esHaesHaesHaty 321 )()()()( 332211 ++=
• The representation of signals as a linear combination of complex exponentials leads to a convenient expression for the response of an LTI system
∑=k
tsk keatxInput )(:
∑=k
tskk kesHatyOutput )()(:
Olli Simula
Tik-61.140 / Chapter 3 11
Linear Combination of Signals
• In a similar way, for discrete-time systems the response of a linear combination of complex exponentials is the linearcombination of individual responses :
∑=k
nkkk zzHanyOutput )(][:
The decompositionof more general signals in terms of eigenfunctions is the basis for frequency domain representation and analysis of LTI systems
∑=k
nkk zanxInput ][:
Olli Simula
Fourier Fourier Series Representation Series Representation of of ContinuousContinuous--Time Time
Periodic SignalsPeriodic Signals
Olli Simula
Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 3
Tik-61.140 / Chapter 3 13
Linear Combinations of Harmonically Related Complex Exponentials
• A signal is periodic if for some value of T:
tallforTtxtx ,)()( +=
• The fundamental period of x(t) is the minimum positive, nonzero value of T for which the above is satisfied;
• The value ω0=2π/T is referred to as the fundamental frequency
Olli SimulaTik-61.140 / Chapter 3 14
Linear Combinations of Harmonically Related Complex Exponentials
– Sinusoidal signal : ttx 0cos)( ω=tjetx 0)( ω=
• Both of these signals are periodic with fundamental frequency ω0 and fundamental period of T=2π/ω0
– Complex exponential:
• Basic periodic signals
Olli Simula
Tik-61.140 / Chapter 3 15
Harmonically Related Complex Exponentials
• Each of these signals has a fundamental frequency that is a multiple of ω 0
• Each is periodic with period T• For |k|>2, the fundamental period of φk(t) is a fraction of T
,...2,1,0,)( )/2(0 ±±=== keet tTjktjkk
πωφ
Olli SimulaTik-61.140 / Chapter 3 16
Linear Combination of Harmonically Related Complex Exponentials
• x(t) is periodic with period T• The term for k=0 is a constant• The terms for k=+1 and k=-1 both have fundamental
frequency equal to ω 0 and referred to as the fundamental components or the first harmonic components
• The two terms for k=+2 and k=-2 are periodic with half the period of the fundamental components and referred to as the second harmonic components
∑∑+∞
−∞=
+∞
−∞===
k
tTjkk
k
tjkk eaeatx )/2(0)( πω
Olli Simula
Tik-61.140 / Chapter 3 17
Example 3.2• Construction of the signal x(t) as linear
combination of harmonically related sinusoidal signals
• Periodic signal: ∑+
−==
3
3
2)(k
tjkkeatx π
31
21,
41,1 3322110 ======= −−− aaaaaaawhere
( ) ( ) ( )tjtjtjtjtjtj eeeeeetx ππππππ 66442231
21
41
1)( −−− ++++++=
)6cos(32
)4cos()2cos(21
1)( ttttx πππ +++=
Olli SimulaTik-61.140 / Chapter 3 18
Fourier Series Representation
• In general, the components for k=+N and k=-N are also periodic with a fraction of the period of the fundamental components and are referred to as the Nth harmonic components
∑∑+∞
−∞=
+∞
−∞===
k
tTjkk
k
tjkk eaeatx )/2(0)( πω
=> Fourier Series representation
Olli Simula
Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 4
Tik-61.140 / Chapter 3 19
Determination of the Fourier Series Representation of a CT Periodid Signal
• Multiplying both sides and integrating gives:
tjn
k
tjkk
tjn eeaetx 000)( ωωω −+∞
−∞=
− ∑=
∫ ∑∫ −∞+
−∞=
− =T
tjn
k
tjkk
Ttjn dteeadtetx
00
000)( ωωω
= ∫∑ −
∞+
−∞=
Ttnkj
kk dtea
0
)( 0ω
Olli SimulaTik-61.140 / Chapter 3 20
Determination of the Fourier Series Representation of a CT Periodid Signal
• The expression for determining the coefficients an is:
= ∫∑∫ −
∞+
−∞=
−T
tnkj
kk
Ttjn dteadtetx
0
)(
0
00)( ωω
≠
==∫ −
nk
nkTdte
Ttnkj
,0
,
0
)( 0ω
∫ −=T
tjnn dtetx
Ta
0
0)(1 ω
Olli Simula
Tik-61.140 / Chapter 3 21
Fourier Series Representation
• The set of coefficients {ak} are called the Fourier series coefficients or spectral coefficients of x(t)
• These complex coefficients measure the portion of the signal x(t) that is at each harmonic of the fundamental component
∑∑+∞
−∞=
+∞
−∞===
k
tTjkk
k
tjkk eaeatx )/2(0)( πω
∫∫ −− ==T
tTjkT
tjkk dtetx
Tdtetx
Ta )/2()(
1)(
10 πω
Olli SimulaTik-61.140 / Chapter 3 22
Convergence of the Fourier Series
∑+
−==
N
Nk
tjkkN eatx 0)( ω
• Let us approximate a given periodic signal x(t) by a linear combination of a finite number of harmonically related complex exponentials
• Let eN(t) denote the approximation error
∑+
−=−=−=
N
Nk
tjkkNN eatxtxtxte 0)()()()( ω
Olli Simula
Tik-61.140 / Chapter 3 23
Convergence of the Fourier Series
dtteET
NN2
)(∫=
• Quantitative measure for the goodness of the approximation is defined by the energy in the error over one period
• It can be shown that the particular choice for coefficients that minimize the energy in the error is
∫ −=T
tjkk dtetx
Ta 0)(
1 ω
Olli SimulaTik-61.140 / Chapter 3 24
Properties of the CT Fourier Series
Tfrequencylfundamenta
andTperiodwithPeriodic
ty
tx
/2)(
)(
0 πω =
∑
∫∞+
−∞=−
−
−
−
−
++
llkl
kkT
MktjM
tjkk
kk
batytxtionMultiplica
bTadtyxnconvolutioPeriodic
aetxshiftingFrequency
eattxshiftingTime
BbAatBytAxLinearity
)()(:
)()(:
)(:
)(:
)()(:
0
000
τττ
ω
ω
k
k
b
a
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 5
Fourier Fourier Series Representation Series Representation of of DiscreteDiscrete--Time Time Periodic SignalsPeriodic Signals
The Fourier series representation of a discrete-time periodic signal is a finiteseries, as opposed to the infinite series representation required for continuous-time periodic signals
Olli SimulaTik-61.140 / Chapter 3 26
Linear Combinations of Harmonically Related Complex Exponentials
• A discrete-time signal is periodic with period N if
][][ Nnxnx +=
• The fundamental period is the smallest positive integer for which the above equation holds
• ω 0=2π/N is the fundamental frequency
Olli Simula
Tik-61.140 / Chapter 3 27
Linear Combinations of Harmonically Related Complex Exponentials
• A set of all DT complex exponential signals that are periodic with period N is given by
,...2,1,0,][ )/2(0 ±±=== keen nNjknjkk
πωφ
• There are only N distinct signals in the above set due to the fact that DT complex exponentials which differ in frequency by a multiple of 2π are identical
][][ nn rNkk += φφ
Olli SimulaTik-61.140 / Chapter 3 28
Linear Combinations of Harmonically Related Complex Exponentials
• This differs from the situation in continuous-time in which the signals φk(t) are all different from one another
][][ nn rNkk += φφ
• When k is changed by any integer multiple of N , the identical sequence is generated
Olli Simula
Tik-61.140 / Chapter 3 29
Linear Combinations of Complex Exponentials
∑∑∑ ===k
nNjkk
k
njkk
kkk eaeananx )/2(0][][ πωφ
• This is referred to as the discrete-time Fourier series and the coefficients ak as the Fourier series coefficients
• Since φk[n] are distinct only over a range on N successive values of k, the summation need only include terms over this range
• Expressing the limits of summation as Nk =
∑∑∑===
===Nk
nNjkk
Nk
njkk
Nkkk eaeananx )/2(0][][ πωφ
Olli SimulaTik-61.140 / Chapter 3 30
Discrete-Time Fourier Series
∑=
−− =Nk
nNrkjk
nNjr eaenx )/2)(()/2(][ ππ
• Multiplying both sides and summing over N terms:
∑ ∑= =
−=Nk Nn
nNrkjk ea )/2)(( π
∑ ∑∑= =
−
=
− =Nn Nk
nNrkjk
Nn
nNjr eaenx )/2)(()/2(][ ππ
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 6
Tik-61.140 / Chapter 3 31
Discrete-Time Fourier Series
±±=
=∑= otherwise
NNkNe
Nn
nNjk
,0
,...2,,0,)/2( π
∑ ∑∑= =
−
=
− =Nk Nn
nNrkjk
Nn
nNjr eaenx )/2)(()/2(][ ππ
∑=
−=Nn
nNjrn enx
Na )/2(][
1 π
• Now, the expression for determining the coefficients an is:
Olli SimulaTik-61.140 / Chapter 3 32
Discrete Fourier Series Representation
• The set of coefficients {ak} are called thediscrete-timeFourier series coefficients or spectral coefficients of x[n]
• The synthesis and analysis equations for the discrete-time Fourier series is given by the following pair of equations:
∑∑==
==Nk
nNjkk
Nk
njkk eaeanx )/2(0][ πω
∑∑=
−
=
− ==Nn
nNjk
Nn
njkk enx
Nenx
Na )/2(][1][1
0 πω
Olli Simula
Tik-61.140 / Chapter 3 33
Discrete Fourier Series Representation
• From φk[n]= φk+rN[n] we have φ0[n]= φN[n] • Thus, we conclude that a0=aN
• If we take k in the range from 0 to N-1, we have
∑=
=Nk
kk nanx ][][ φ
][...][][][ 111100 nanananx NN −−+++= φφφ
• Similarly, if k ranges from 1 to N, we have][...][][][ 2211 nanananx NNφφφ +++=
Olli SimulaTik-61.140 / Chapter 3 34
Discrete Fourier Series Representation
Since there are only N distinct complex exponentials that are periodic with period N, the discrete-time Fourier series representation is a finite series with N terms
• Letting k range over any set of N consecutive integers we conclude that
Nkk aa +=
• The values of Fourier coefficients ak repeat periodically with period N
Olli Simula
Tik-61.140 / Chapter 3 35
Properties of the DT Fourier Series
Nfrequencylfundamenta
andNperiodwithPeriodic
ny
nx
/2][
][
0 πω =
∑
∑
=−
=
−
−
−
−
++
Nrlkl
kkNr
MknNjM
nNjkk
kk
banynxtionMultiplica
bNarnyrxnconvolutioPeriodic
aenxshiftingFrequency
eannxshiftingTime
BbAanBynAxLinearity
][][:
][][:
][:
][:
][][:
)/2(
)/2(0
0
π
π
Nperiod
withPeriodic
b
a
k
k
Olli Simula
Fourier Series Fourier Series and and LinearLinear TimeTime--Invariant Invariant
SystemsSystems
Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 7
Tik-61.140 / Chapter 3 37
Fourier Series and LTI Systems
• Fourier series representation can be used to construct any periodic signal in discrete-time and essentially all periodic continuous-time signals of practical importance
• The response of an LTI system to a linear combination of complex exponentials take a simple form
Olli SimulaTik-61.140 / Chapter 3 38
Response of an LTI System
Olli Simula
In continuous-time:
;)( stetx = ∫+∞
∞−
−= ττ τdehsHwhere s)()(stesHty )()( =
In discrete-time:
;][ nznx = nzzHny )(][ = ∑+∞
−∞=
−=k
kzkhzHwhere ][)(
When s and z are general complex numbers, H(s) and H(z) are referred to as system functions
Tik-61.140 / Chapter 3 39
Frequency Response
• With Re{s}=0, i.e., s=jω, and consequently the input x(t)=est= ejωt is the complex exponential at frequency ω
• The system function H(jω ) as a function of ω is given by
∫+∞
∞−−= dtethjH tjωω )()(
H(jω) is the frequency response of the system in continuous-time
Olli SimulaTik-61.140 / Chapter 3 40
Frequency Response
• In discrete-time, we focus on values of z for which |z|=1, so that z= ejω and zn= ejωn
• The system function H(z) for z of the form z= ejω is given by
∑+∞
−∞=
−=n
njj enheH ωω ][)(
H(z) is the frequency response of the system in discrete-time
Olli Simula
Tik-61.140 / Chapter 3 41
Frequency Response• The response of an LTI system to a complex exponential
signal of the form ejωt or ejωn is simple to express in terms of the frequency response
• In discrete-time:
The effect of the LTI system is to modify individually each of the Fourier coefficients of the input by multiplying it with the value of the frequency response
∑=
=Nk
nNjkk eanx )/2(][ π
( )∑=
=Nk
nNjkNkjk eeHany )/2(/2][ ππ
Olli Simula
FilteringFiltering
Need to change the relative amplitudes of the frequency components in a signal or eliminate some frequency components entirely
=> FILTERING PROCESS
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 8
Tik-61.140 / Chapter 3 43
Filtering operations• Frequency-shaping filters are linear time-
invariant systems that change the shape of thespectrum
• Frequency-selective filters are designed to pass some frequencies and significantly attenuate or eliminate others
• Fourier series coefficients of the output of an LTI system are those of the input multiplied by the frequency response of the system
Olli SimulaTik-61.140 / Chapter 3 44
Filtering operations• Filtering can be conveniently accomplished
through the use of LTI systems with an appropriately chosen frequency response
• Frequency-domain methods provide us with the ideal tools to examine this important class of applications
• Examples:– Frequency shaping filters: Equalizer structures– Frequency selective filters: Differentiating filters
Olli Simula
Tik-61.140 / Chapter 3 45
Example: Image Filtering
Olli SimulaTik-61.140 / Chapter 3 46
Example: Two-Point Averaging Filter
( )]1[][21
][ −+= nxnxny
]1[ −nx][nx D
+21
• Frequency response:
( )]1[][21
][ −+= nnnh δδ• Impulse response:
[ ] )2/cos(121)( 2/ ωωωω jjj eeeH −− =+=
( ) 2/)(arg),2/cos()( ωω ωω −== jj eHandeH
Olli Simula
Tik-61.140 / Chapter 3 47
Example: Two-Point Averaging Filter
• |H(e jω)| is large for frequencies near ω=0 and decreasesas ωapproaches πor -π
• Higher frequencies are attenuated more than lower ones
• The phase response is linear• Discrete -time frequency
response is periodic with period 2π
Olli SimulaTik-61.140 / Chapter 3 48
Example: Two-Point Averaging Filter• Consider a constant input, i.e., a zero-frequency complex
exponentialx[n] = Kej0n = K
The output isy[n] = H(ej0n)Kej0n=[e-j0/2cos(0/2)]Kej0n = K = x[n]
• If the input is the high-frequency signalx[n] = Kejπn= K(-1)n
The output isy[n] = H(eπn)Keπn= [e-jπ/2cos(π/2)]Keπn = 0
• The system separates out the long-term constant value of a signal from its high-frequency fluctuations
Olli Simula
Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 9
Tik-61.140 / Chapter 3 49
Frequency-Selective Filters• A class of filters specifically intended to accurately
or approximately select some bands of frequencies and reject others
• Examples:– Removing noisein certain bands– Communication systems; channel separation
Olli SimulaTik-61.140 / Chapter 3 50
Frequency-Selective Filters• Lowpass filter
– Passes low frequencies, i.e., frequencies around ω=0 and attenuates or rejects higher frequencies
• Highpass filter– Passes high frequencies and attenuates or rejects lower frequencies
• Bandpass filter– Passes a band of frequencies and attenuates or rejects frequencies
both higher and lower than those in the band that is passed
• Bandstop filter– Attenuates or rejects a band of frequencies and passes frequencies
both higher and lower than those in the band that is rejected
Olli Simula
Tik-61.140 / Chapter 3 51
Frequency-Selective Filters• Cutoff frequencies
– The frequencies defining the boundaries between frequencies that are passed and frequencies that are rejected , i.e., frequencies in the passband and in the stopband
• Notch filter– A bandstop filter which rejects a specific frequency and passes all
other frequencies
• Multiband filter– A filter that has several passbands and stopbands
• Comb filter– A multiband filter in which passbands and/or stopbands are
(usually) equally spaced in frequency
Olli SimulaTik-61.140 / Chapter 3 52
Ideal Frequency-Selective Filters• Ideal lowpass filter with cutoff frequency ω c
>
≤=
c
cjH
ωω
ωωω
||,0
||,1)(
1H(jω)
0−ωc ωc
PassbandStopband Stopband
ω
Olli Simula
Tik-61.140 / Chapter 3 53
Ideal Frequency-Selective Filters• Ideal highpass filter with cutoff frequency ω c
≥
<=
c
cjH
ωω
ωωω
||,1
||,0)(
1H(jω)
0−ωc ωc
StopbandPassband Passband
ω
Olli SimulaTik-61.140 / Chapter 3 54
Ideal Frequency-Selective Filters• Ideal bandpass filter with cutoff frequencies ωc1 and ω c2
≤≤
=elsewhere
jHcc
,0
||,1)(
21 ωωωω
1
H(jω)
0ωc2−ωc2 −ωc1 ωc1 ω
Olli Simula
Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 10
Tik-61.140 / Chapter 3 55
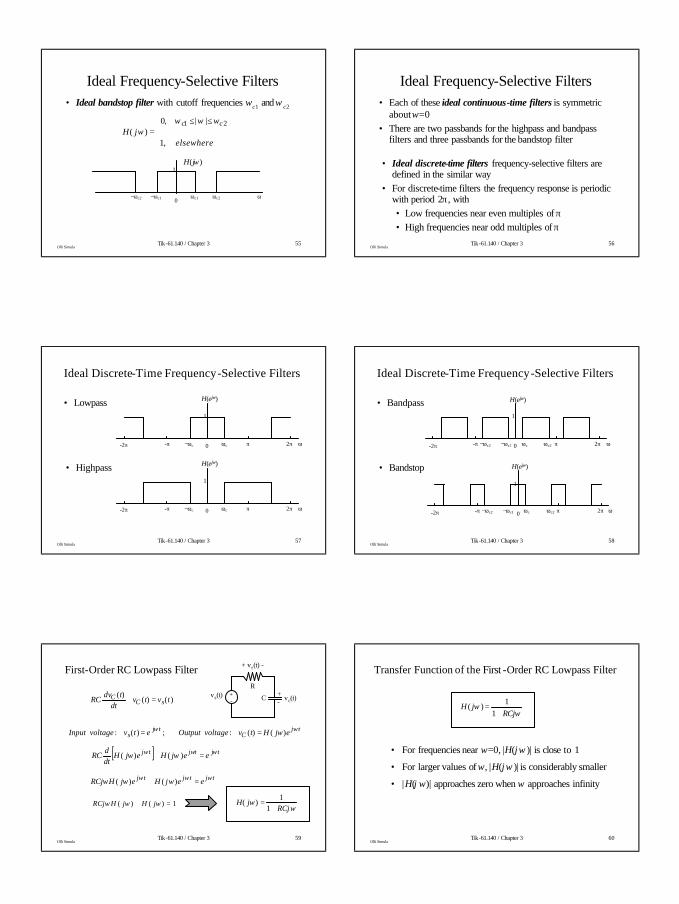
Ideal Frequency-Selective Filters• Ideal bandstop filter with cutoff frequencies ωc1 and ω c2
≤≤
=elsewhere
jHcc
,1
||,0)(
21 ωωωω
1H(jω)
0ωc2−ωc2 −ωc1 ωc1 ω
Olli SimulaTik-61.140 / Chapter 3 56
Ideal Frequency-Selective Filters• Each of these ideal continuous-time filters is symmetric
aboutω=0• There are two passbands for the highpass and bandpass
filters and three passbands for the bandstop filter
• Ideal discrete-time filters frequency-selective filters are defined in the similar way
• For discrete-time filters the frequency response is periodic with period 2π, with • Low frequencies near even multiples of π• High frequencies near odd multiples of π
Olli Simula
Tik-61.140 / Chapter 3 57
Ideal Discrete-Time Frequency-Selective Filters
• Lowpass
• Highpass
-2π 2π-π π ωωc−ωc 0
1
H(ejω)
-2π 2π-π π ωωc−ωc 0
1
H(ejω)
Olli SimulaTik-61.140 / Chapter 3 58
Ideal Discrete-Time Frequency-Selective Filters
• Bandpass
• Bandstop
-2π 2π-π π ω−ωc1−ωc2 0
1
H(ejω)
ωc2ωc
-2π 2π-π π ω−ωc1−ωc2 0
1
H(ejω)
ωc2ωc
Olli Simula
Tik-61.140 / Chapter 3 59
First-Order RC Lowpass Filter
+- C
R
+ v r(t) -
vs(t) vc(t)+-)()(
)(tvtv
dttdv
RC sCC =+
;)(: tjs etvvoltageInput ω= tj
C ejHtvvoltageOutput ωω)()(: =
[ ] tjtjtj eejHejHdtd
RC ωωω ωω =+ )()(
tjtjtj eejHejHRCj ωωω ωωω =+ )()(
1)()( =+ ωωω jHjHRCjω
ωRCj
jH+
=1
1)(
Olli SimulaTik-61.140 / Chapter 3 60
Transfer Function of the First -Order RC Lowpass Filter
ωω
RCjjH
+=
11)(
• For frequencies near ω=0, |H(j ω )| is close to 1
• For larger values of ω, |H(j ω )| is considerably smaller
• |H(j ω)| approaches zero when ω approaches infinity
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 11
Tik-61.140 / Chapter 3 61
Transfer Function of the First -Order RC Lowpass Filter
• Impulse response: )(1
)( / tueRC
th RCt−=
• Step response: [ ] )(1)( / tuets RCt−−=
• Trade-offs in filter design:
– Narrow passband requirement: Large RC
– Fast step response: Small RC
Olli SimulaTik-61.140 / Chapter 3 62
First-Order RC Highpass Filter
+- C
R
+ v r(t) -
vs(t) vc(t)+-
)()()( tvtvtv RsC −=
• The output is now the voltage across the resistor
( ))()()(
)( tvtvdtd
Cdt
tdvCti Rs
C −==
−==dt
tdvdt
tdvRCtRitv Rs
R)()(
)()(
dttdv
RCtvdt
tdvRC s
RR )(
)()(
=+
Olli Simula
Tik-61.140 / Chapter 3 63
First-Order RC Highpass Filter
RCjRCj
jGω
ωω
+=
1)(
dttdv
RCtvdt
tdvRC s
RR )(
)()(
=+
;)(: tjs etvvoltageInput ω= tj
R ejGtvvoltageOutput ωω)()(: =
+- C
R
+ v r(t) -
vs(t) vc(t)+-
[ ] tjtjtj edtd
RCejGejGdtd
RC ωωω ωω =+ )()(
tjtjtj eRCjejGejGRCj ωωω ωωωω =+ )()(
ωωωω RCjjGjGRCj =+ )()(
Olli SimulaTik-61.140 / Chapter 3 64
Discrete-Time Filters Described by Constant Coefficient Difference Equations
• Discrete-time LTI systems described by difference equations can be either
Recursive and have an infinite impulse response (IIR systems)
orNonrecursive and have a finite impulse response (FIR systems)
• IIR systems are direct counterparts of continuous-time systems described by differential equations
Olli Simula
Tik-61.140 / Chapter 3 65
First-Order Recursive Discrete-Time Filters
ωω
jj
aeeH −−
=1
1)(
][]1[][ nxnayny =−−
++
DDa
][nx ][ny
]1[ −ny
;][: njenxInput ω=njj eeHnyOutput
ωω )(][: =
njnjjnjj eeeaHeeH ωωωωω =− − )1()()(
[ ] njnjjj eeeHae ωωωω =− − )(1
Difference equation:
Olli SimulaTik-61.140 / Chapter 3 66
Transfer Function of the First-Order Recursive Discrete-Time Filter
• Parameter a controls the behavior of the filter
• For a positive => Lowpass filter
a controls the rate of attenuation at low frequencies, ω=0
• For a negative => Highpass filter
a controls the rate of attenuation at high frequencies, ω=π
ωω
jj
aeeH −−
=1
1)(
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 12
Tik-61.140 / Chapter 3 67
Transfer Function of the First-Order Recursive Discrete-Time Filter
• Impulse response: ][][ nuanh n=
• Step response:
• |a| controls the speed with which the impulse and step responses approach their long-term values,
With faster responses for smaller values of |a| , andhence for broader passbands
• For |a|<1 the system is stable, i.e., h[n] is absolutely summable
][][][ nhnuns ∗= ][1
1 1nu
aan
−−=
+
Olli SimulaTik-61.140 / Chapter 3 68
Nonrecursive Discrete-Time Filters
• General form of an FIR nonrecursive difference equation
∑−=
−=M
Nkk knxbny ][][
• The output is the weighted average of the (N+M+1) values of x[n] from x[n-M] through x[n+N] with the weights given by coefficients bk.
• Such a filter is often called a moving-average filter, where the output y[n] for any n , e.g. for n0 , is an average of values of x[n] in the vicinity of n0
Olli Simula
Tik-61.140 / Chapter 3 69
Three-Point Moving-Average Filter
• Difference equation
( )]1[][]1[31
][ +++−= nxnxnxny
• The impulse response
( )]1[][]1[31
][ +++−= nnnnh δδδ
• The frequency response
( )ωωω jjj eeeH ++= − 131
)( ( )ωcos2131
+=
Olli SimulaTik-61.140 / Chapter 3 70
Causal Three-Point Moving-Average Filter
• Difference equation
( )]2[]1[][31
][ −+−+= nxnxnxny
• The impulse response
( )]2[]1[][31
][ −+−+= nnnnh δδδ
• The frequency response
( )ωωω 2131)( jjj eeeH −− ++=
( )ωω cos2131
+= − je
( )ωωω jjj eee −− ++= 131
Olli Simula
Tik-61.140 / Chapter 3 71
Three-Point Moving-Average Filter
Olli SimulaTik-61.140 / Chapter 3 72
General Moving-Average Filter
• Difference equation
• The impulse response is a rectangular pulse, i.e.,h[n]=1/(N+M+1) for -N<n<M and h[n]=0 otherwise
• The frequency response
[ ] [ ])2/sin(
2/)1(sin1
1)( 2/)(
ωωωω ++
++= − MN
eMN
eH MNjj
∑−=
−++
=M
Nkknx
MNny ][
11
][
Olli Simula

Tik-61.140 Signal Processing Systems Spring 2001
Chapter 3 / O. Simula 13
Tik-61.140 / Chapter 3 73
Moving-Average Filter with N+M+1=25
Olli SimulaTik-61.140 / Chapter 3 74
Moving-Average Filter with N+M+1=50
Olli Simula
Tik-61.140 / Chapter 3 75
Differentiating Nonrecursive Filter
• Consider the difference equation
( )2
]1[][][
−−=
nxnxny
• For input signals that vary greatly from sample to sample, the value of y[n] is large
• The impulse response
• The frequency response
( )ωω jj eeH −−= 121
)( )2/sin(2/ ωωjje −=
( )]1[][21
][ −−= nnnh δδ
Olli SimulaTik-61.140 / Chapter 3 76
First-Order Nonrecursive Highpass Filter
Olli Simula
Tik-61.140 / Chapter 3 77
Nonrecursive Discrete-Time Filters
• The impulse response of a nonrecursive FIR filter is of finite length
• The impulse response is, thus, always absolutely summable for any h[n]=bn
=> FIR filters are always stable
Olli Simula




















![[TIK] Network hardware](https://img.pdfslide.us/doc/110x75/55ae29c41a28abab108b45a5/tik-network-hardware.jpg)