Embed Size (px)
Citation preview
The z-Transform
Prof. Siripong Potisuk

LTI System description
Previous basis function: unit sample or DT impulse The input sequence is represented as a linear combination of shifted DT impulses. The response is given by a convolution sum of the input and the reflected and shifted impulse response
Now, use eigenfunctions of all LTI systems as basis function
Eigenfunctions of LTI Systems
An eigenfunction of a system is an input signal that, when applied to a system, results in the output being the scaled version of itself.
The scaling factor is known as the system’s eigenvalue. Complex exponentials are eigenfunctions of LTI systems,
i.e., the response of an LTI system to a complex exponential input is the same complex exponential with only a change in amplitude.

s = + j
z = re j

If the input is linear combination of complex exponentials, thenthe output is also a linear combination of the same set of complexexponentials (both CT and DT).
z = re j

Z-transform of DT Signals
The bilateral z-transform of a general DT signal x[n] isdefined as
i.e., riable,complex va a is where z

If the Fourier transform of converges, then thez-transform converges
The z-transform of a sequence has associated with it a region of convergence (ROC) on the complex z-plane defined as a range of values of z for which X(z) converges.
Convergence Issue
Ex. For r = 1, the z-transform reduces to the DTFT on the unit circle contour in the complex z-plane.
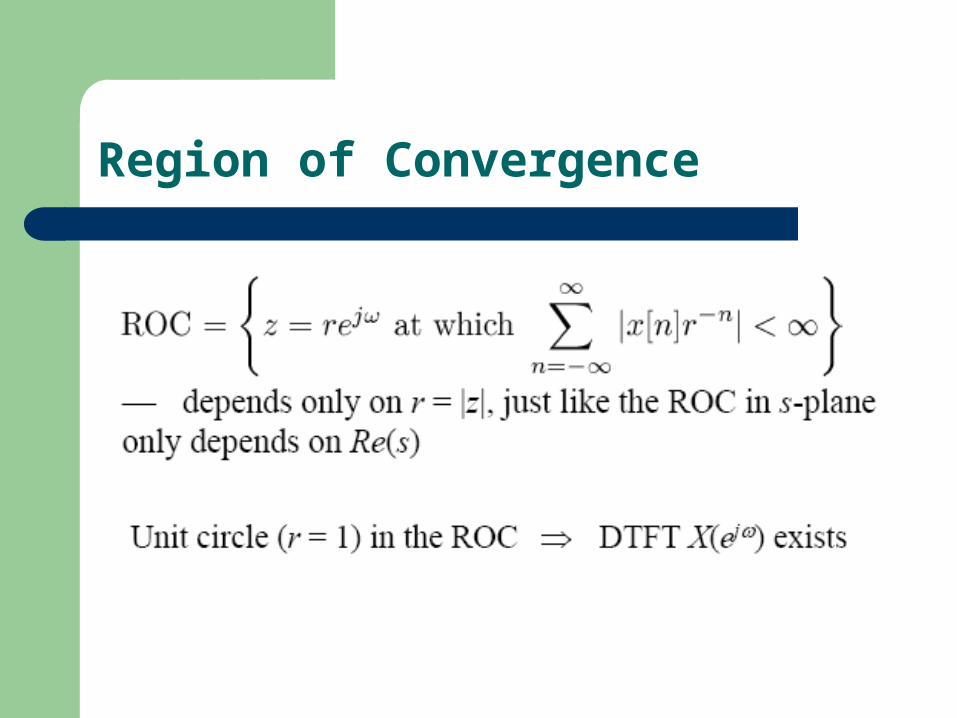
Region of Convergence

Ex.1 Find the z-transform of the following right-sided sequence
][][ nuanx n
n
nn
nn azznuazX )(][)(0
1
This form to find inverseZTusing PFE

Ex.2 Find the z-transform of the following left-sided sequence
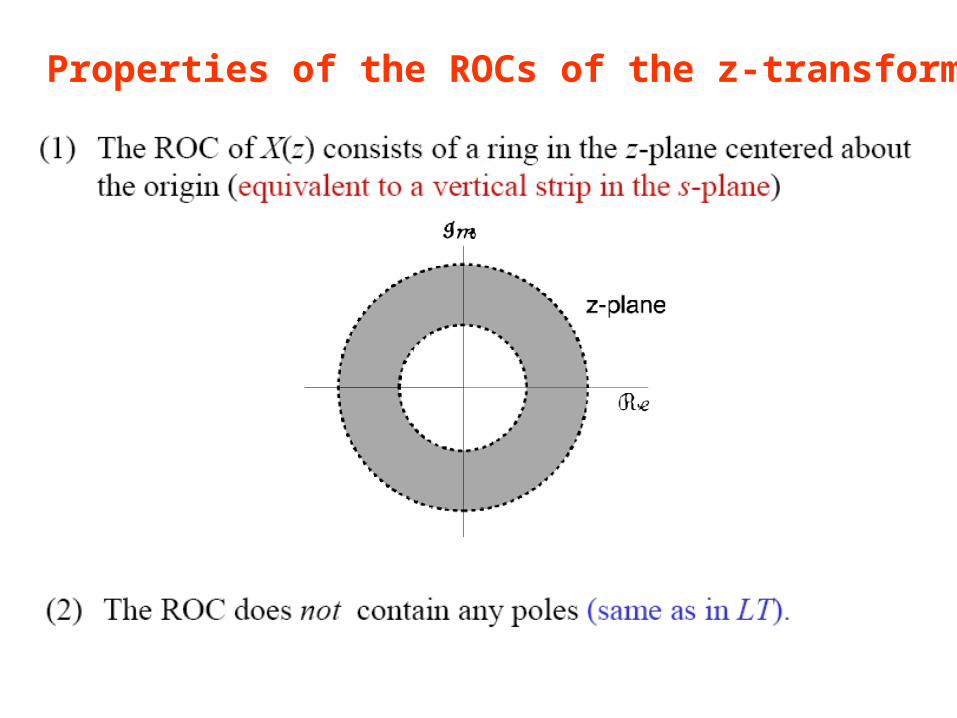
Properties of the ROCs of the z-transform
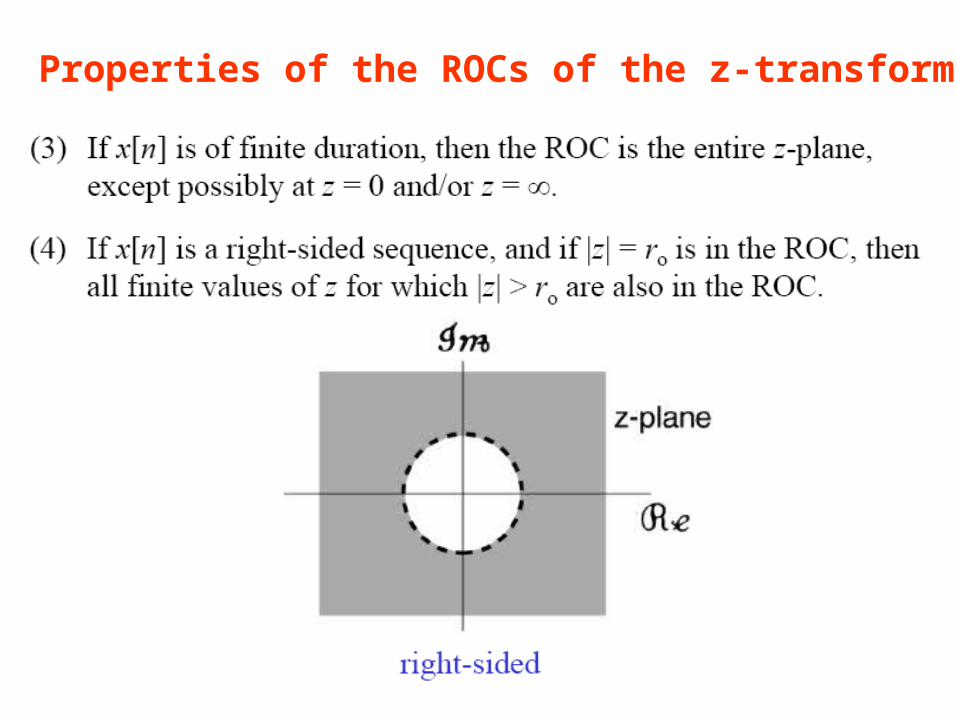
Properties of the ROCs of the z-transform
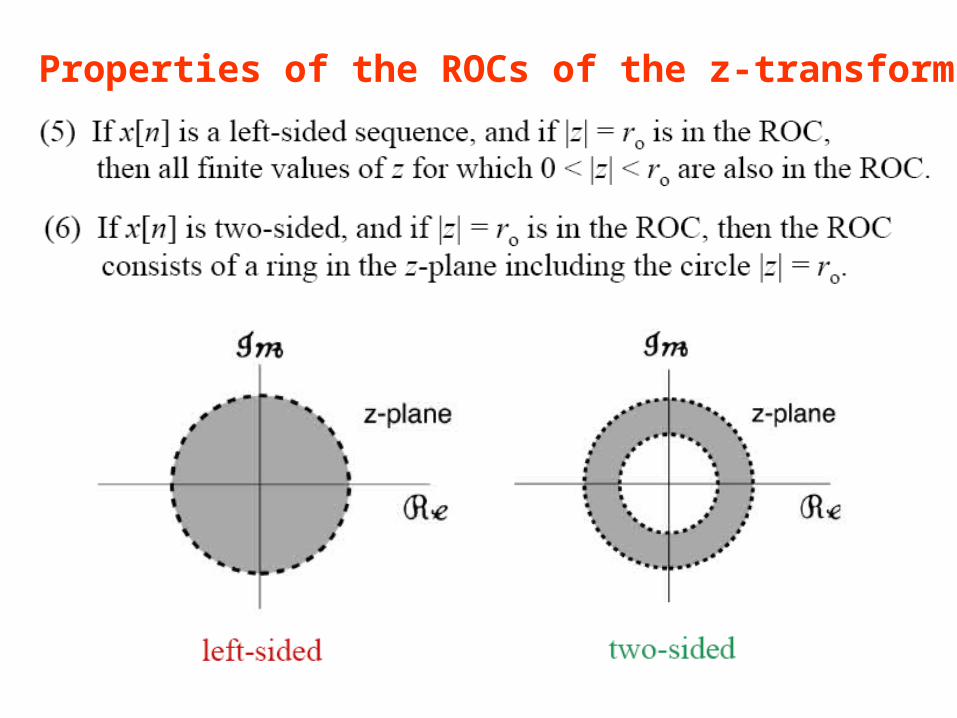
Properties of the ROCs of the z-transform

The Unilateral Z-transform
- The unilateral z-transform of a causal DT signal x[n] is defined as
0
][)(n
nznxzX
- Equivalent to the bilateral z-transform of x[n]u[n]
- Since x[n]u[n] is always a right-sided sequence, ROC of X(z) is always the exterior of a circle.
- Useful for solving difference equations with initial conditions
Ex. 1 Find the z-transform of the following sequence x = {2, -3, 7, 4, 0, 0, ……..}
origin. except the plane-complex entire theis ROC The
0||,4732
4732][)(
3
23
321
z
zz
zzz
zzzznxzXn
n
Ex. 2 Find the z-transform of [n]
plane.- entire theof consisting ROCan with
1][)(
z
znzXn
n
Ex. 3 Find the z-transform of [n -1]
. 0except plane- entire theof consisting ROCan with
1]1[)( 1
zz
zzznzX
n
n
Ex. 4 Find the z-transform of [n +1]
infinity.at pole a is therei.e.,
,except plane- entire theof consisting ROCan with
]1[)(
zz
zznzXn
n
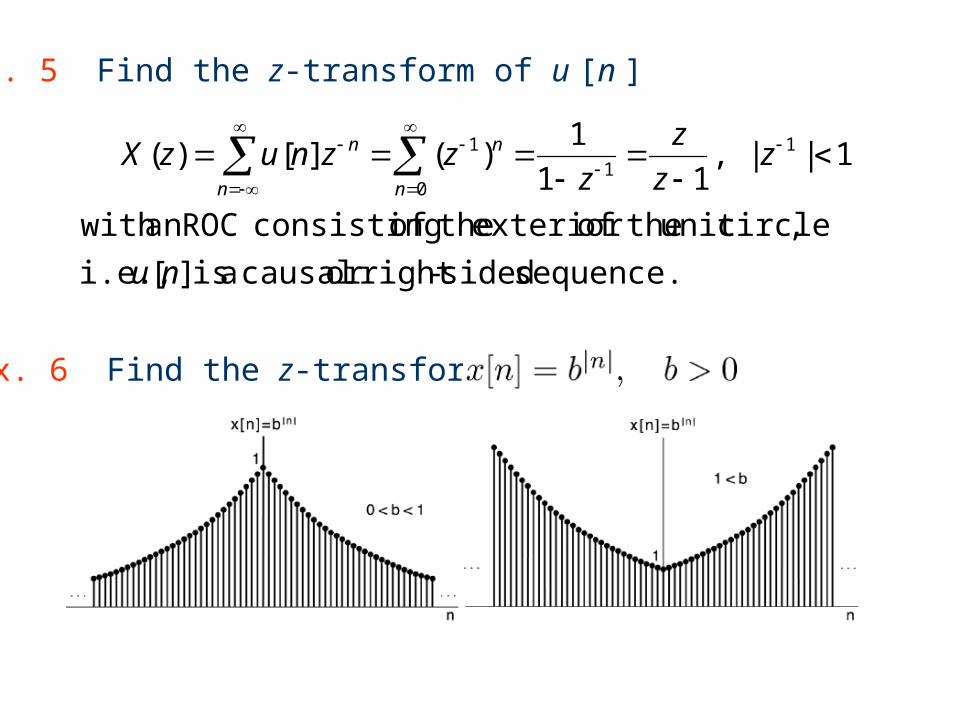
Ex. 5 Find the z-transform of u [n ]
sequence. sided-rightor causal a is ][ i.e.,
,circleunit theofexterior theof consisting ROCan with
1||,11
1)(][)( 1
10
1
nu
zz
z
zzznuzX
n
n
n
n
Ex. 6 Find the z-transform of

Rewriting x[n] as a sum of left-sided and right-sided sequencesand finding the corresponding z-transforms,
Notice from the ROC that the z-transformdoesn’t exist for b > 1
where

Properties of z-Transform
)()(][][ :Linearity (3) zYbzXanybnxa

Properties of z-Transform
a
zXnxan ][ :Property scale- Z(4)
)(lim]0[ :Value Initial )5( zX xz
circle)unit theinside are poles theall i.e., circle,unit the
includes )()1( of ROC theifonly e(Applicabl
)()1(lim][ :Value Final )6(1
zXz
zXz xz
)()(][][ :nConvolutio )7( zXzHnxnh
Rational z-Transform
For most practical signals, the z-transform can be expressedas a ratio of two polynomials
.polynomialr denominato theof
roots thei.e.,, of theare ,,, and
polynomialnumerator theof
roots thei.e.,, of theare ,,, where
)())((
)())((
)(
)()(
21
21
210
210
X(z)polesppp
X(z)zeroeszzz
pzpzpza
zzzzzzb
zD
zNzX
N
M
N
M
Rational z-Transform
NNN
MMM
N
M
azaz
bzbzb
pzpzpz
zzzzzzb
zD
zNzX
11
110
21
210
)())((
)())((
)(
)()(
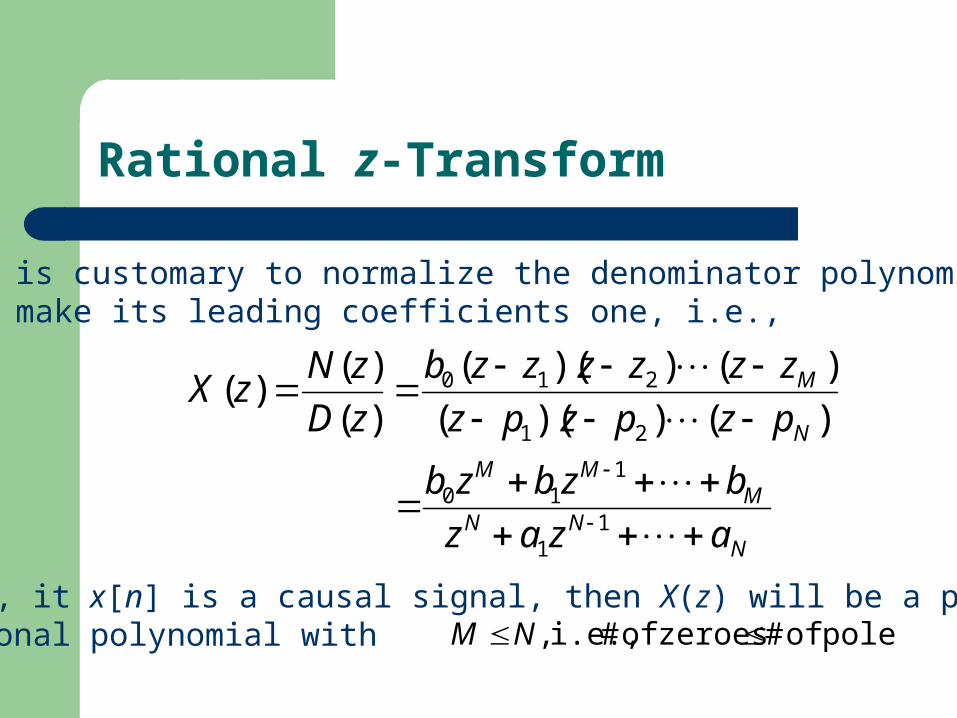
It is customary to normalize the denominator polynomialto make its leading coefficients one, i.e.,
Also, it x[n] is a causal signal, then X(z) will be a properrational polynomial with poles. of # zeroes of # i.e., , NM

where
where, for a fixed r,
IDTFT
DTFT
(A contour integral)
Inverse z-Transform

Synthetic Division Method
• Perform long division of the numerator polynomial by the denominator polynomial to produce the quotient polynomial q(z 1)
])2()1()0([)( 21 zqzqqzzX r
nr
rn
rnqnxrnqnxr
0
],[
,0][0],[][0
• Write X(z) as a normalized rational polynomial in z 1 by
multiplying the numerator and denominator by z N
NN
MM
r
zaza
zbzbbzzX
1
1
110
1
)()(
• Identify coefficients in the power series definition of X (z) where

Ex. Find the inverse z-transform of 43 23)( zzzzX
4)1()3( 23)( zzzzX
321
)1()2()3(
]3[]2[]1[]0[
]1[]2[]3[][)(
zxzxzxx
zxzxzxznxzX n
n
Equating coefficients,
},0,2,0,0,0,0,1,0,3,0,{][
nx
Remarks: This method doesn’t produce a closed-form expression for x[n]

Ex. Find the inverse z-transform of )32(
)1()(
2
zz
zzX
},15,3,3,3,1,0{][
nx

Partial Fraction Method
Produce a closed-form expression for x[n] Write X(z) as a sum of terms, each of which can
be inverse z-transformed by using a z-transform table
Suitable for rational X(z) whose denominator polynomial has distinct real poles (multiplicity of one or simple real poles)
Partial Fraction Expansion
,)())((
)()(
21 Npzpzpz
zbzX
Niz
zXpzR
pz
R
z
zX
ipz
ii
N
i i
i
1 ,)()(
,)(
1
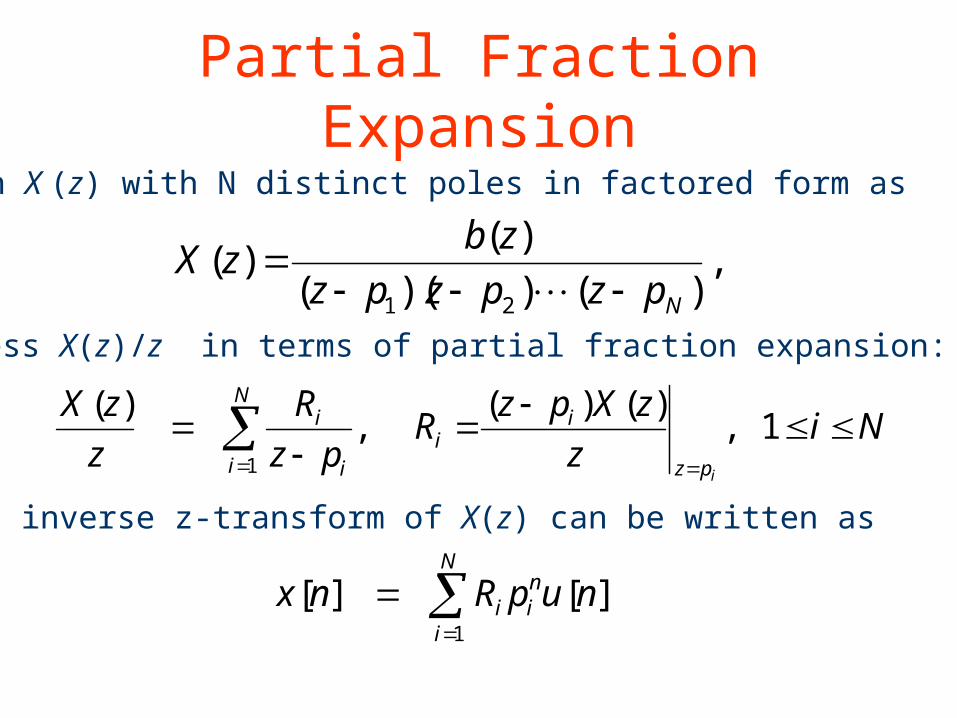
Given X (z) with N distinct poles in factored form as
express X(z)/z in terms of partial fraction expansion:
The inverse z-transform of X(z) can be written as
][][1
nupRnx ni
N
ii

Ex. Find the inverse z-transform of )3)(1)(2(
)4(10)(
2
zzz
zzzX
][2
)3(65
6
)1(25
3
)2(80][ nunx
nnn

Ex. Find the inverse z-transform of ))((
)(2
bzaz
zzX
][][11
nuba
banx
nn

Ex. Find the inverse z-transform of 23 )(
1)(
azzzX
]4[)4(][ 5 nuannx n

Ex. Find the inverse z-transform of 22)(
az
zzX
][)2
sin(][ 1 nun
anx n