Embed Size (px)
DESCRIPTION
The Third Moscow International Solar System Symposium. Moscow, 8-12 October 2012 3MS 3 -MN-11 LANDING DYNAMICS ON THE «LUNA-GLOB» PROJECT Sikharulidze Yu.G., Zhukov B.I., Tuchin A.G. (Keldysh Institute of Applied Mathemathics RAS) Zaiko Yu.K., Fedotov V.P., Likhachov V.N., Rozin P.E. - PowerPoint PPT Presentation
Citation preview

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
LANDING DYNAMICS ON THE «LUNA-GLOB» PROJECT
Sikharulidze Yu.G., Zhukov B.I., Tuchin A.G.(Keldysh Institute of Applied Mathemathics RAS)
Zaiko Yu.K., Fedotov V.P., Likhachov V.N., Rozin P.E.(Lavochkin Design Center)

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
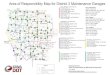
h=18 kmVn=1690 m/sVr=0
h=1500 mVn=0 Vr=-5m/s
h=50 mVn=0 Vr=-5m/s h=0
Vn=0 Vr=-2 m/s
1
2
3 4
Pre-landing orbit 18x100 kmPeriluna
Phase 1
Phase 2
Phase 3
1. Phases of Landing Trajectory

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
Range of the initial true anomaly -10oo +10o
Variation of the initial time 3 min
De-orbit point shift 306 km
Propellant consumption 389 kg (initial Lander mass 911 kg)
The optimal pitch angle guidance and linear pitch law
Engine C1.154.0000.0-0 with thrust of 42020 kgf (tolerance)
Regulation range 400480 kgf (+13-33 km)
2. Main Deceleration Phase 1 with Downrange Maneuver

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
Terminal guidance algorithm with numerical prediction of
remaining trajectory (Numerical Predictor-Corrector NPC).
Two-parametric guidance: (t)= 0+ t.
Three predicted trajectories.
Multistep process: tguid=1 s, tstab=0.05 s.
Linear correction of guidance parameters: 0i =0i-1+0i
i = i-1+ i
3. Numerical Predictor-Corrector

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
Terminal conditions for the Phase 1: Vn1=0 (stop of prediction),
Vr1=-5 m/s, h1=1500 m (corrected values).
Adaptation algorithm: m(t)=? P(t)=?
Phantom acceleration: W=P/m=P/(m0-│dm/dt│t)=g0Psp/(-t),
where =m0/│dm/dt│- “total burning time”.
Measurements W1 for t1 and W2 for t2 →
parameters of adaptation , Psp
4. Algorithm of Adaptation

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
Numerical derivative ∂Φ/∂P=-0.021 deg/kgf.
Predicted angular error due to thrust variation
and de-orbit point shift: ΔΦi pred.
Thrust correction: ΔP= -ΔΦi pred/(∂Φ/∂P). Thrust is unknown.
P, kgf Δo, deg h1, m Vr, m/s Δmprop, kg
420 0 1504 -5.0 0
440 0 1499 -5.0 0
400 0 1500 -4.6 0
446.3 +0.5 1504 -5.2 -0.3
396.7 -0.5 1499 -5.0 +0.3
5. Thrust Correction

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
6. Phase 1. Trajectory with Linear Pitch Guidance

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
Engine C1.154.0000.0-0 with thrust of 42020 kgf (tolerance)
Regulation range 400480 kgf
Initial errors: ΔΦ1, Δh1, ΔVr1.
Corrected values: Vr2=-5 m/s, h2=50 m, ΔΦ2=0
Parameters of control: 2(t2)= 02+ 2t2, tign2 – time ignition
(ignition altitude hign2).
Four predicted trajectories.
Linear correction of guidance parameters: 0i =0i-1+0i,
i= i-1+ i, tign2(i) =tign2(i-1)+tign2(i)
7. Phase 2. Precision Deceleration

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
After engine ignition: two-parametric control & thrust regulation
0i =0i-1+0i, i= i-1+ i
Numerical derivative ∂P/∂h=1.14 kgf/m.
Measurements of phantom acceleration W→ , Psp.
Thrust correction ΔP=- Δh/(∂P/∂h), Δh=hpred2-h2.
Thrust is unknown.
8. Phase 2. Adaptation Algorithm

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
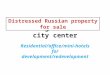
300 320 3400.0
0.5
1.0
1.5
-60
-40
-20
0
0
150
300
450
P,kgf
P
h,km
Vy,m/s
h
Vr
t, s0
9. Phase 2. Parameters of Nominal Trajectory

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
10. Phase 2. Correction of Initial Downrange Error

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
11. Phase 2. Correction of Initial Velocity Error

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
12. Phase 3. Landing on the Moon
Engine 2554.487.00-0
Thrust 2x(65±5) kgf (tolerance), without thrust regulation.
Specific thrust 287.7±5 s (tolerance)
Terminal conditions: altitude 0.3 m, vertical velocity -2.5±1 m/s,
side velocity ≤1 m/s
Single control parameter: tign3 – time of engine ignition.

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
13. Phase 3. Single-parameter guidance

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
14. Phase 3. Two-parameter guidance

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
15. Phase 3. Simulation Results
Parameters Thrust, kgf Comments120 130 110
hign1, m 43.3 43.3 43.3 The first ignition
hoff1, m 10.5 17.6 0.3
hign2, m 6.5 10.6 - The second ignitionhoff1, m 0.3 0.3 -
mprop3, kg 0 -0.1 -0.9 Propellant consumption

The Third Moscow International Solar System Symposium. Moscow, 8-12 October 20123MS3-MN-11
16. Results
1. The terminal guidance algorithm (NPC) with adaptation to
real motion conditions was developed for landing on the Moon.
2. For the Phase 1 NPC provides compensation of initial de-
orbit point error within ±0.5o or ±15 km in downrange (±9 s).
3. For the Phase 2 NPC provides compensation of initial errors
within ±40 m in downrange or ±2 m/s in side velocity by the
pith angle of ±20o from the local vertical.
4. For the Phase 3 NPC provides adaptation to the real motion
conditions.
![Phos-Chek 3% AFFF MS - [AQUAFILM AF-3MS] … 3% AFFF MS - [AQUAFILM AF-3MS] Safety data sheet According to 1907/2006/EC (REACH), 453/2010/EU, 2015/830/EU SECTION 1: IDENTIFICATION](https://img.pdfslide.us/doc/110x75/5b0ac18c7f8b9ae61b8c958c/phos-chek-3-afff-ms-aquafilm-af-3ms-3-afff-ms-aquafilm-af-3ms-safety-data.jpg)