Embed Size (px)
Citation preview
The support vector machine
Nuno Vasconcelos ECE Department, UCSD
2
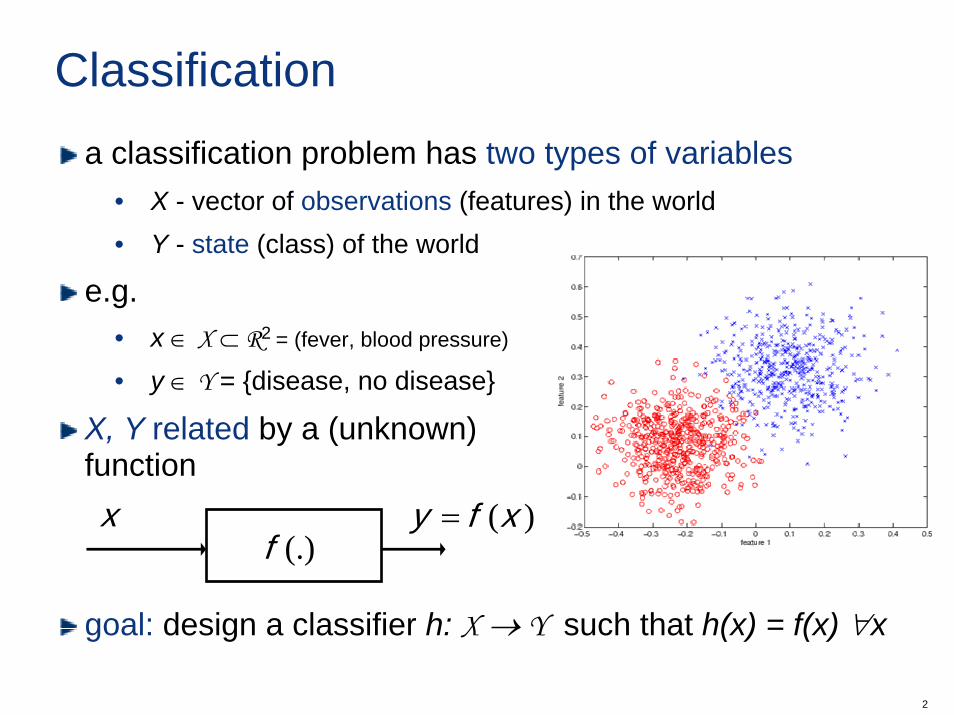
Classificationa classification problem has two types of variables
• X - vector of observations (features) in the world• Y - state (class) of the world
e.g. • x ∈ X ⊂ R2 = (fever, blood pressure)
• y ∈ Y = {disease, no disease}
X, Y related by a (unknown) function
goal: design a classifier h: X → Y such that h(x) = f(x) ∀x
)(xfy =x(.)f
3
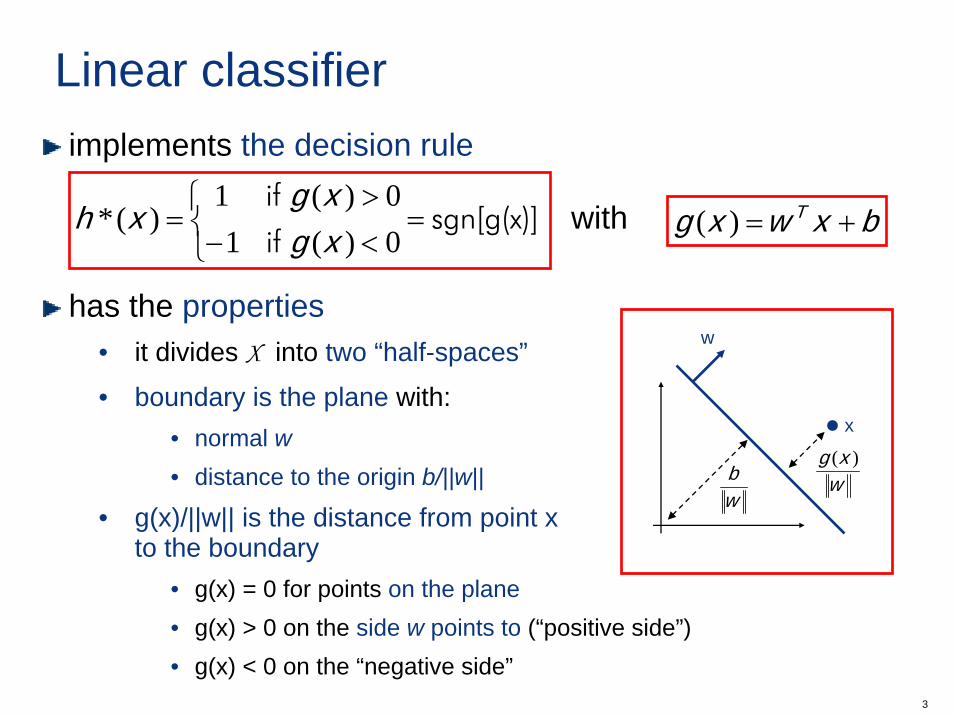
Linear classifier implements the decision rule
with
has the properties• it divides X into two “half-spaces”
• boundary is the plane with:• normal w• distance to the origin b/||w||
• g(x)/||w|| is the distance from point xto the boundary
• g(x) = 0 for points on the plane• g(x) > 0 on the side w points to (“positive side”)• g(x) < 0 on the “negative side”
bxwxg T +=)(⎩⎨⎧
=<−>
= sgn[g(x)] if
if
0)(10)(1
)(*xgxg
xh
w
wb
x
wxg )(
4
Linear classifierwe have a classification error if• y = 1 and g(x) < 0 or y = -1 and g(x) > 0• i.e y.g(x) < 0
and a correct classification if• y = 1 and g(x) > 0 or y = -1 and g(x) < 0• i.e y.g(x) > 0
note that, for a linearly separable training set D = {(x1,y1), ..., (xn,yn)}
we can have zero empirical riskthe necessary and sufficient condition is that
( ) ibxwy iT
i ∀>+ ,0
5
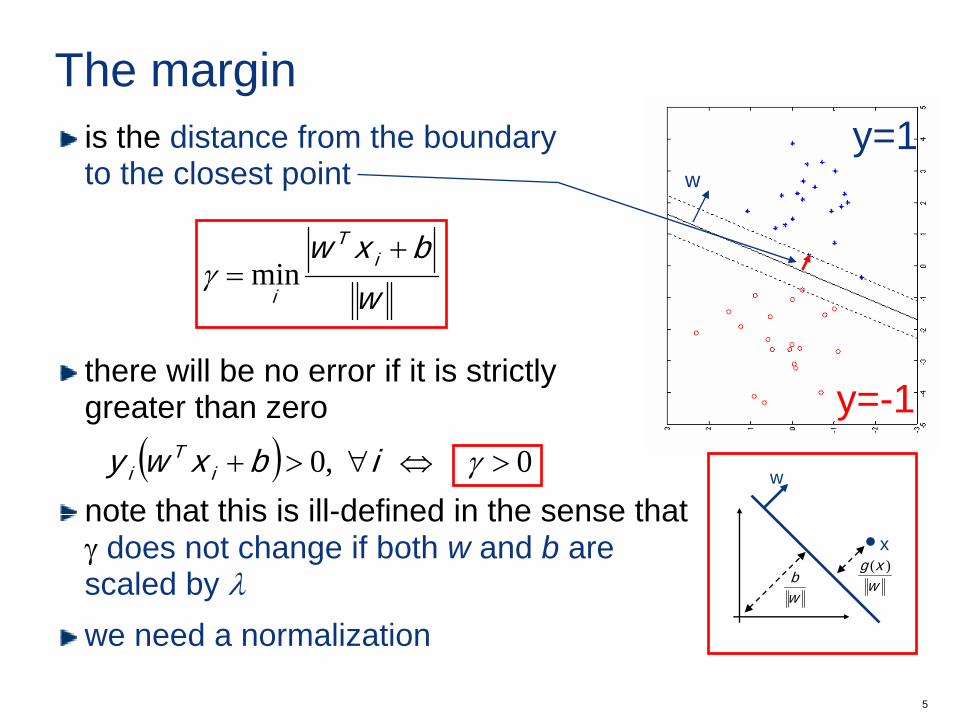
The marginis the distance from the boundaryto the closest point
there will be no error if it is strictlygreater than zero
note that this is ill-defined in the sense that γ does not change if both w and b are scaled by λwe need a normalization
( ) 0,0 >⇔∀>+ γ ibxwy iT
i
w
y=1
y=-1
w
wb
x
wxg )(
wbxw i
T
i
+= minγ
6
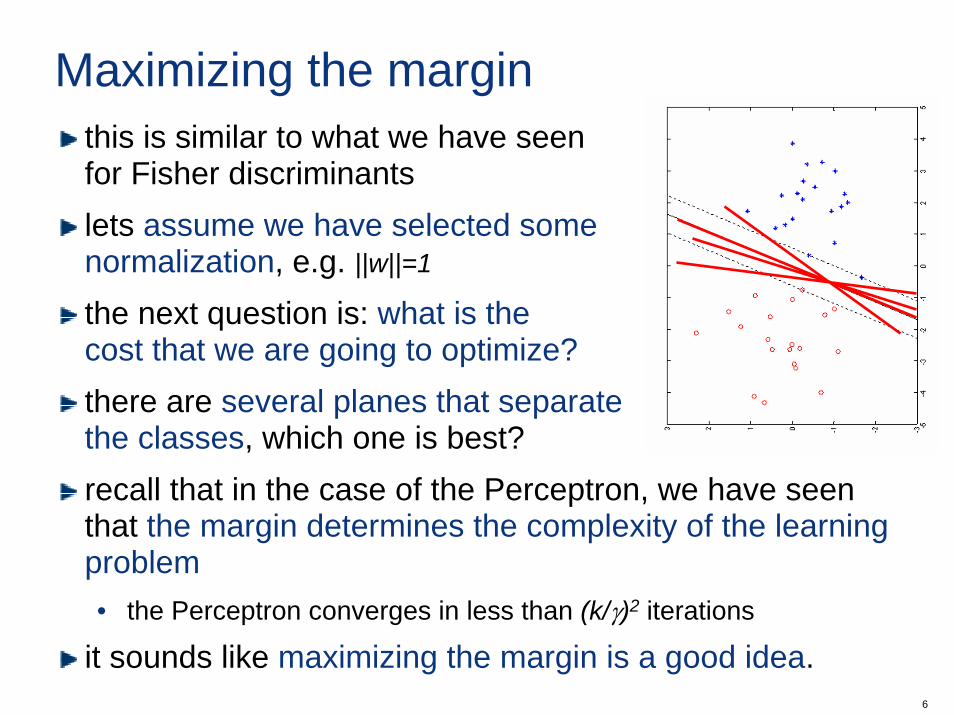
Maximizing the marginthis is similar to what we have seenfor Fisher discriminantslets assume we have selected somenormalization, e.g. ||w||=1
the next question is: what is thecost that we are going to optimize?there are several planes that separatethe classes, which one is best?recall that in the case of the Perceptron, we have seen that the margin determines the complexity of the learning problem• the Perceptron converges in less than (k/γ)2 iterations
it sounds like maximizing the margin is a good idea.
7
γ
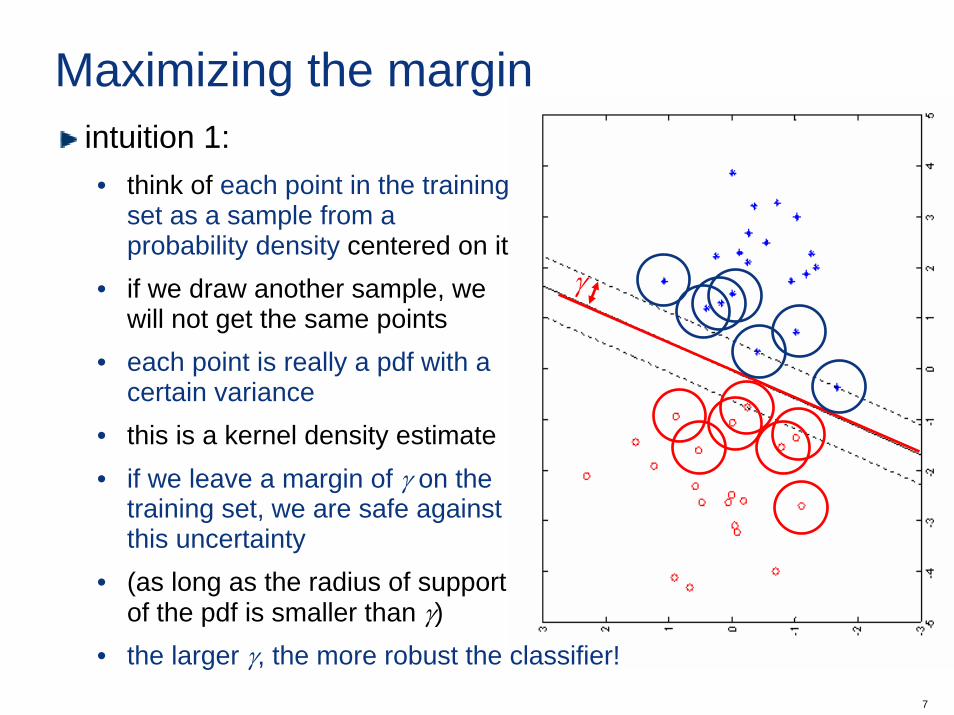
Maximizing the marginintuition 1:• think of each point in the training
set as a sample from a probability density centered on it
• if we draw another sample, we will not get the same points
• each point is really a pdf with a certain variance
• this is a kernel density estimate• if we leave a margin of γ on the
training set, we are safe against this uncertainty
• (as long as the radius of support of the pdf is smaller than γ)
• the larger γ, the more robust the classifier!
8
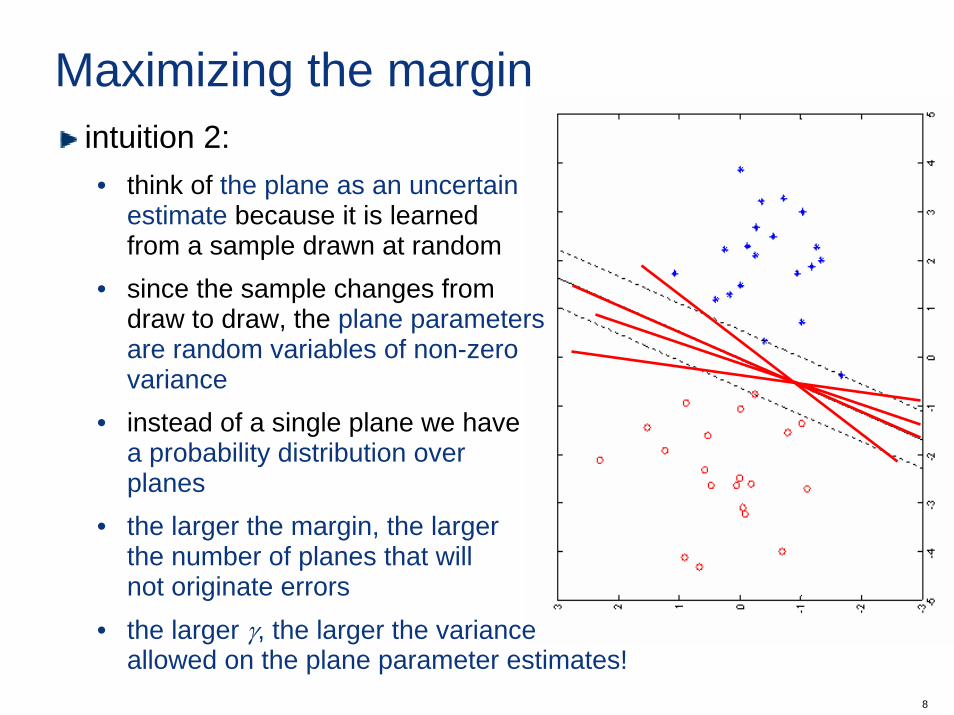
Maximizing the marginintuition 2:• think of the plane as an uncertain
estimate because it is learnedfrom a sample drawn at random
• since the sample changes fromdraw to draw, the plane parametersare random variables of non-zerovariance
• instead of a single plane we havea probability distribution overplanes
• the larger the margin, the largerthe number of planes that willnot originate errors
• the larger γ, the larger the variance allowed on the plane parameter estimates!
9
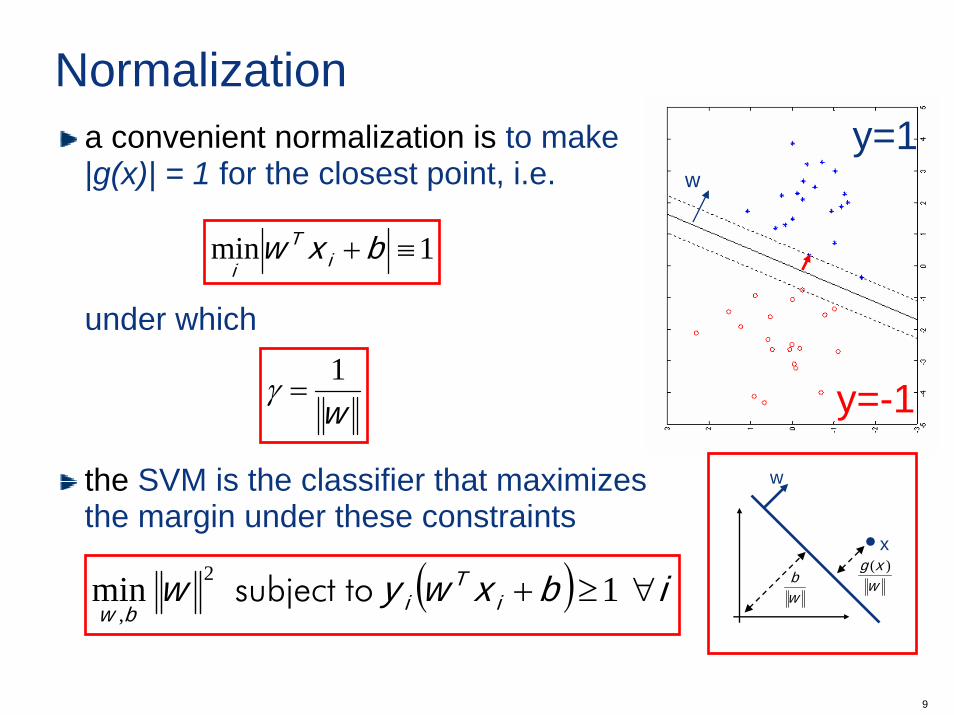
Normalizationa convenient normalization is to make |g(x)| = 1 for the closest point, i.e.
under which
the SVM is the classifier that maximizes the margin under these constraints
w
y=1
y=-1
w
wb
x
wxg )(
1min ≡+ bxw iT
i
w1
=γ
( ) ibxwyw iT
ibw∀≥+ tosubject 1min 2
,
10
Dualitythis is an optimization problem with constraintsthere is a rich theory on how to solve such problems• we will not get into it here (take 271B if interested)• the main result is that we can formulate a dual problem which is
easier to solve• in the dual formulation we introduce a vector of Lagrange
multipliers αi, one associated with each constraint, and solve
• where
is the Lagrangian
{ }),,(maxmax00
αααα
bwLqw
min )( ≥≥
=
( )[ ] -i
∑ −+= 121),,( 2 bxwywbwL i
Tiiαα
11
The dual problemfor the SVM, the dual problem can be simplified into
once this is solved, the vector
is the normal to the maximum margin planenote: the dual solution does not determine the optimal b*,since b drops off when we solve
0
21max
0
=⎭⎬⎫
⎩⎨⎧
+−
∑
∑∑≥
i
i
tosubject
ii
ijTij
ijiji
y
xxyy
α
αααα
∑=i
iii xyw α*
),,( αbwLw
min
12
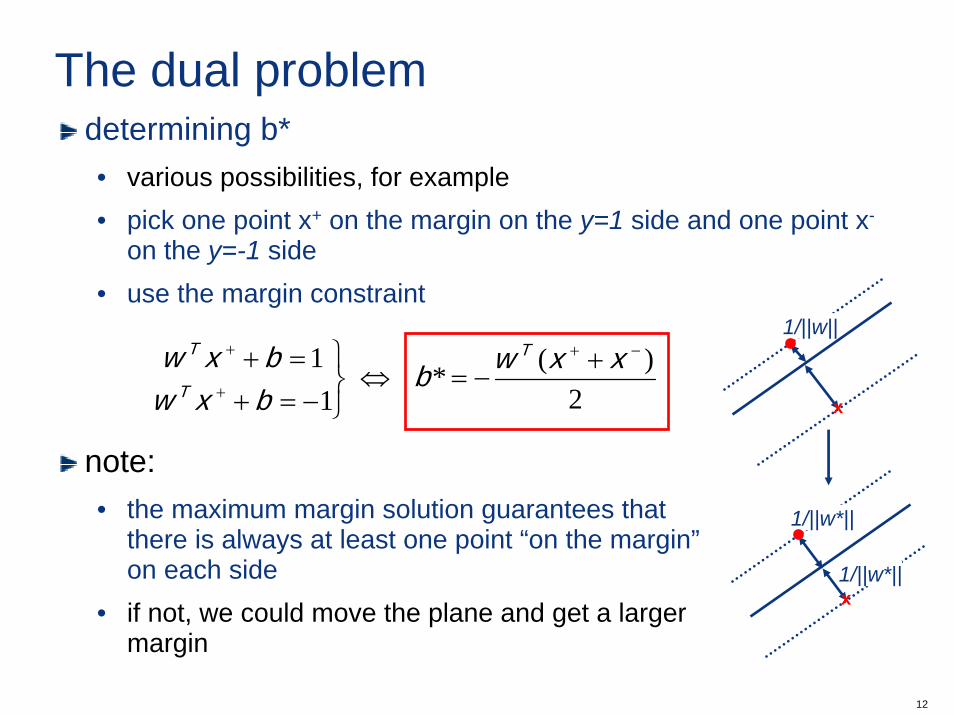
The dual problemdetermining b*• various possibilities, for example• pick one point x+ on the margin on the y=1 side and one point x-
on the y=-1 side• use the margin constraint
note:• the maximum margin solution guarantees that
there is always at least one point “on the margin”on each side
• if not, we could move the plane and get a largermargin
1/||w*||
1/||w*||
x
1/||w||
x2)(*
11 −+
+
+ +−=⇔
⎭⎬⎫
−=+=+ xxwb
bxwbxw T
T
T
13
Support vectors
αi=0
αi=0
αi>0
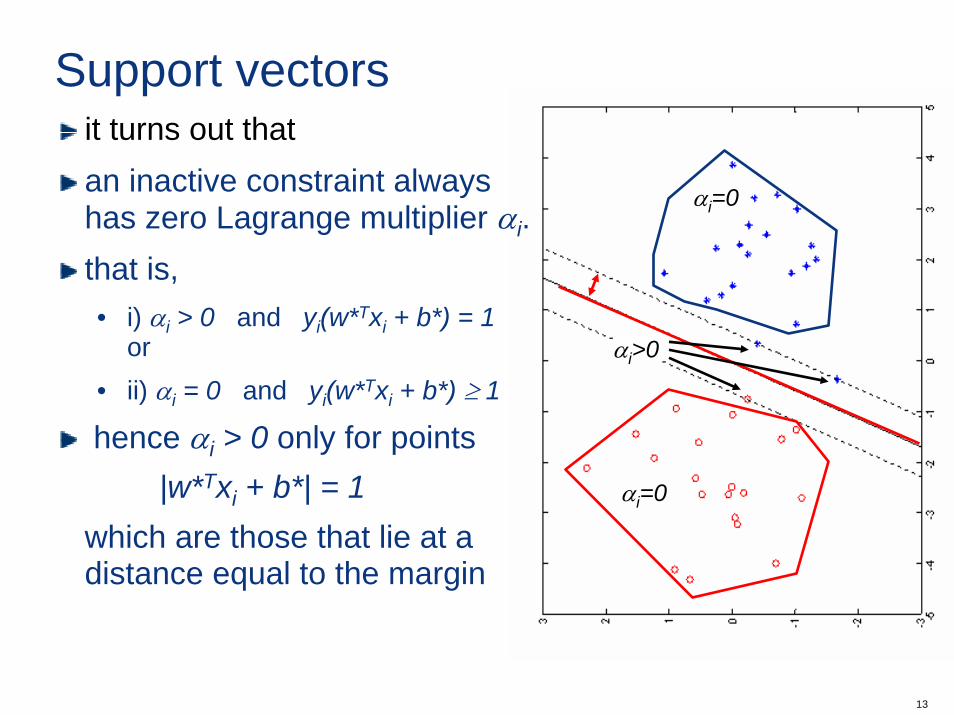
it turns out thatan inactive constraint always has zero Lagrange multiplier αi. that is, • i) αi > 0 and yi(w*Txi + b*) = 1
or• ii) αi = 0 and yi(w*Txi + b*) ≥ 1
hence αi > 0 only for points|w*Txi + b*| = 1
which are those that lie at a distance equal to the margin
14
Support vectors
αi=0
αi=0
αi>0
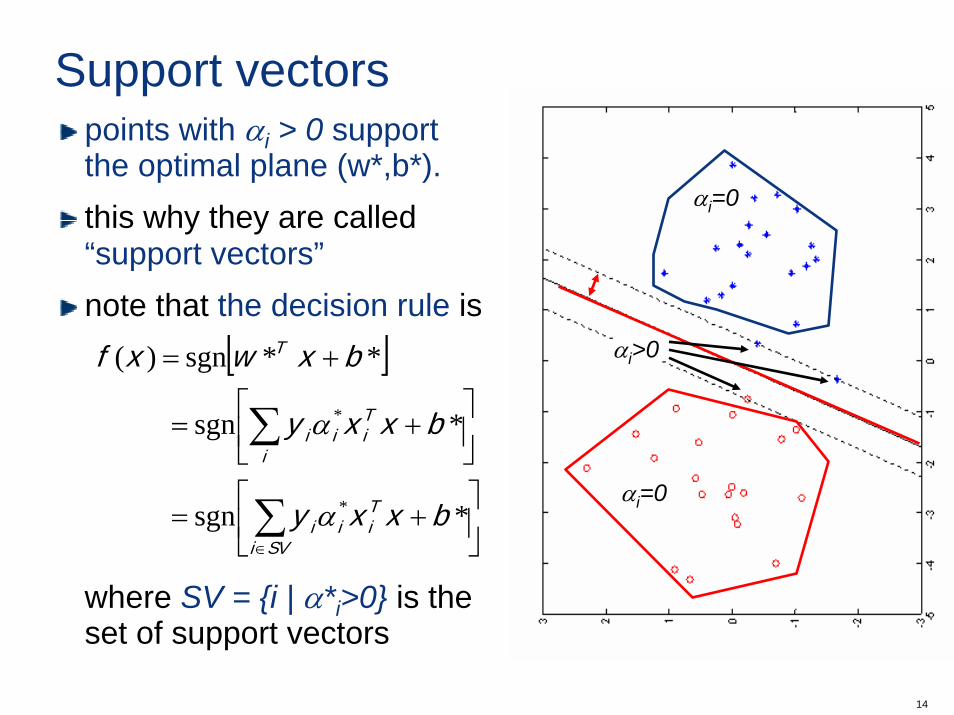
points with αi > 0 supportthe optimal plane (w*,b*).this why they are called“support vectors”note that the decision rule is
where SV = {i | α*i>0} is the set of support vectors
[ ]
⎥⎦
⎤⎢⎣
⎡+=
⎥⎦
⎤⎢⎣
⎡+=
+=
∑
∑
∈
*sgn
*sgn
**sgn)(
*
*
bxxy
bxxy
bxwxf
SVi
Tiii
i
Tiii
T
α
α
15
Support vectors
αi=0
αi=0
αi>0
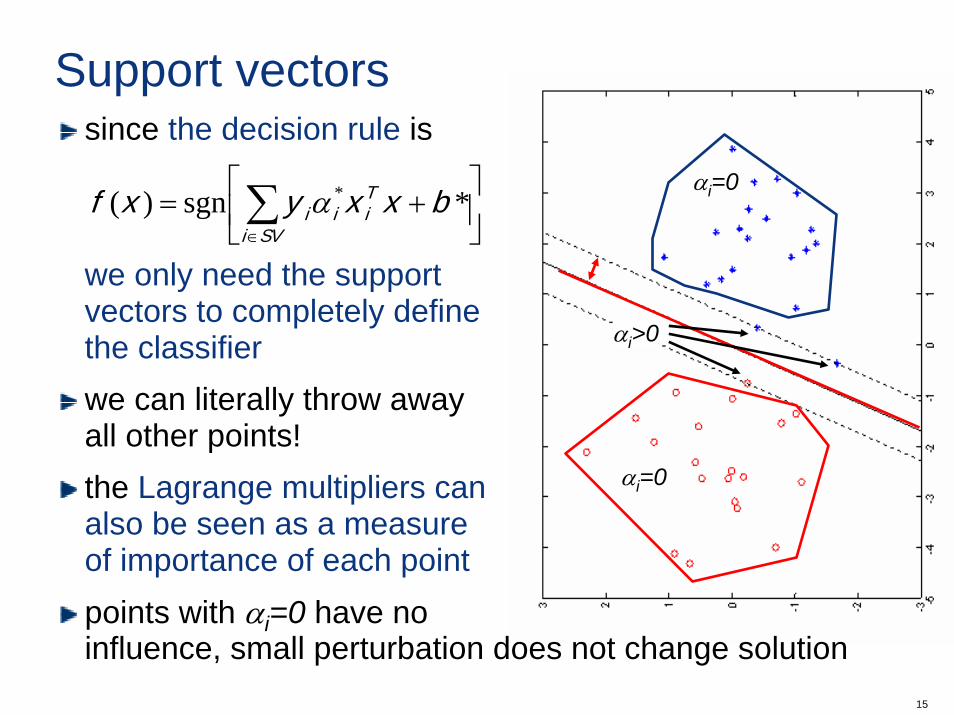
since the decision rule is
we only need the supportvectors to completely definethe classifierwe can literally throw awayall other points!the Lagrange multipliers canalso be seen as a measureof importance of each pointpoints with αi=0 have no influence, small perturbation does not change solution
⎥⎦
⎤⎢⎣
⎡+= ∑
∈
*sgn)( * bxxyxfSVi
Tiii α
16
The robustness of SVMswe talked a lot about the “curse of dimensionality”• number of examples required to achieve certain precision is
exponential in the number of dimensions
it turns out that SVMs are remarkably robust to dimensionality• not uncommon to see successful applications on 1,000D+ spaces
two main reasons for this:• 1) all that the SVM does is to learn a plane.
Although the number of dimensions may belarge, the number of parameters is relativelysmall and there is no much room for overfitting
In fact, d+1 points are enough to specify thedecision rule in Rd!
x
x
17
SVMs as feature selectorsthe second reason is that the space is not really that large• 2) the SVM is a feature selector
To see this let’s look at the decision function
This is a thresholding of the quantity
note that each of the terms xiTx is the projection of the vector
to classify (x) into the training vector xi
.*sgn)( *⎥⎦
⎤⎢⎣
⎡+= ∑
∈
bxxyxfSVi
Tiiiα
∑∈SVi
Tiii xxy *α
18
SVMs as feature selectorsdefining z as the vector of the projection onto all support vectors
the decision function is a plane in the z-space
with
this means that• the classifier operates on the span of the support vectors!• the SVM performs feature selection automatically
( )TiT
iT
kxxxxxz ,,)(
1L=
⎥⎦
⎤⎢⎣
⎡+=⎥
⎦
⎤⎢⎣
⎡+= ∑∑
∈
*)(sgn*sgn)( ** bxzwbxxyxf kk
kSVi
Tiii α
( )Tiiii kkyyw ** ,,*
11αα L=
19
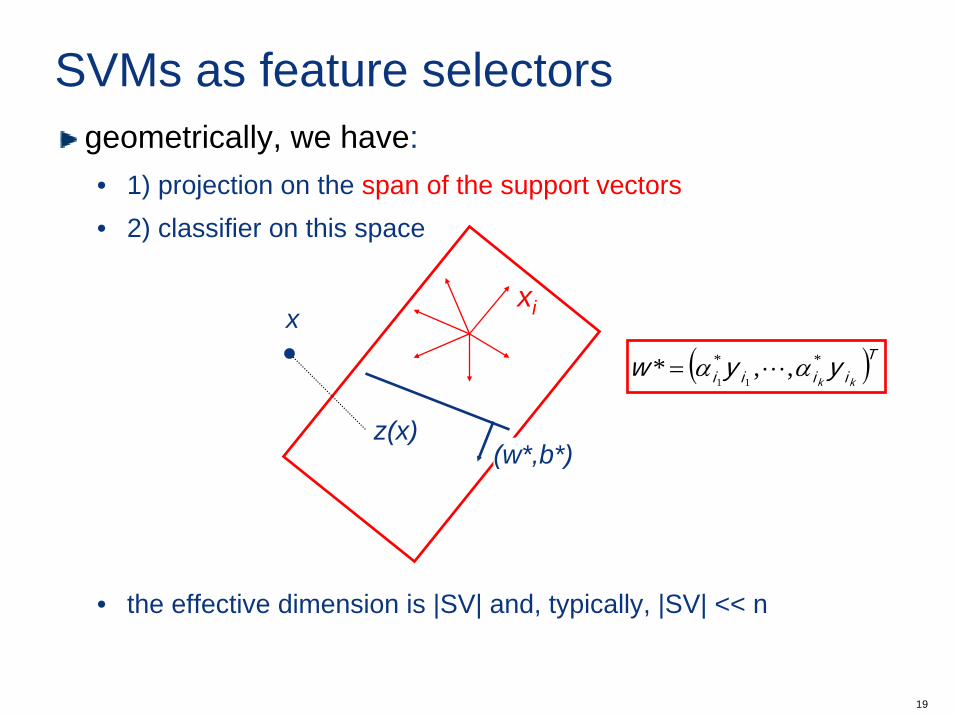
SVMs as feature selectorsgeometrically, we have:• 1) projection on the span of the support vectors• 2) classifier on this space
• the effective dimension is |SV| and, typically, |SV| << n
( )Tiiii kkyyw ** ,,*
11αα L=
xix
z(x)(w*,b*)
20
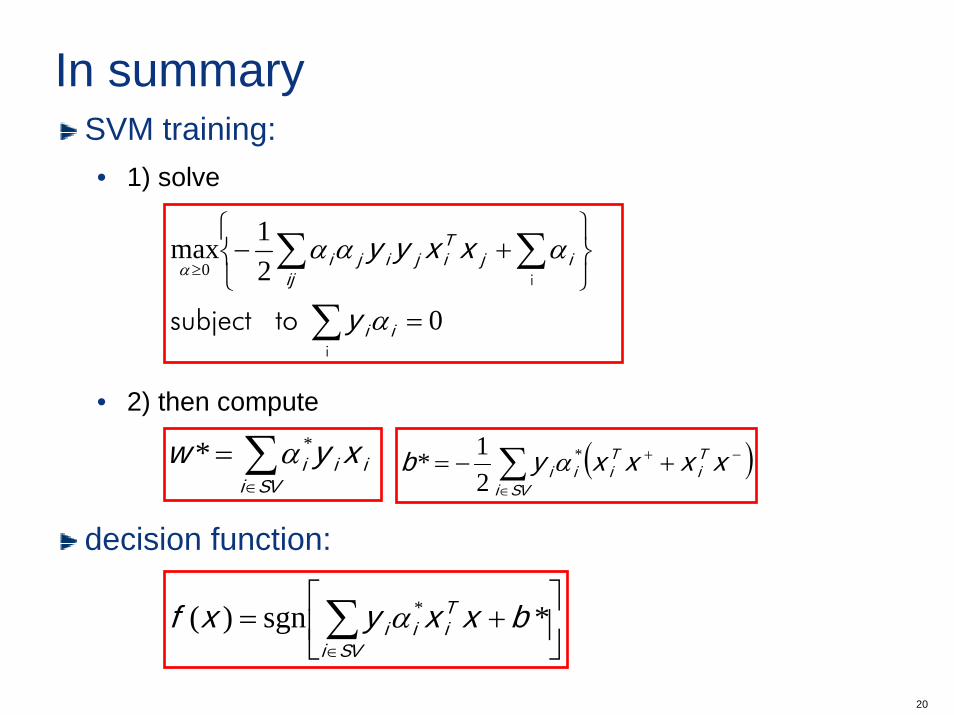
In summarySVM training:• 1) solve
• 2) then compute
decision function:
0
21max
0
=⎭⎬⎫
⎩⎨⎧
+−
∑
∑∑≥
i
i
tosubject
ii
ijTij
ijiji
y
xxyy
α
αααα
∑∈
=SVi
iii xyw ** α ( )−+
∈
+−= ∑ xxxxyb Ti
Tii
SVii
*
21* α
⎥⎦
⎤⎢⎣
⎡+= ∑
∈
*sgn)( * bxxyxfSVi
Tiii α
21
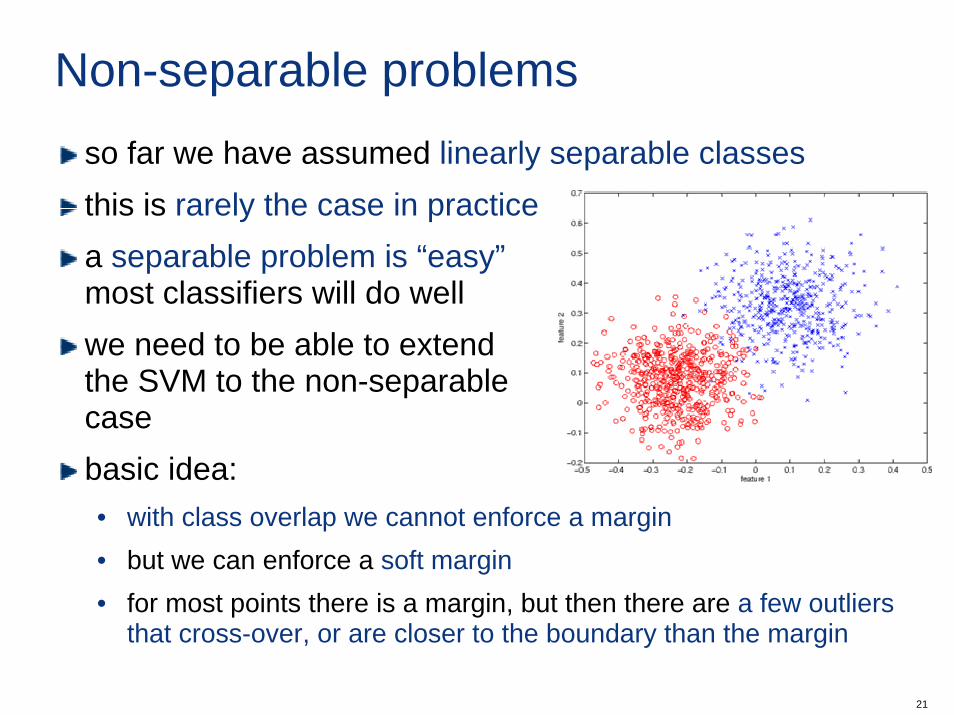
Non-separable problemsso far we have assumed linearly separable classesthis is rarely the case in practicea separable problem is “easy”most classifiers will do wellwe need to be able to extendthe SVM to the non-separablecasebasic idea:• with class overlap we cannot enforce a margin• but we can enforce a soft margin• for most points there is a margin, but then there are a few outliers
that cross-over, or are closer to the boundary than the margin
22
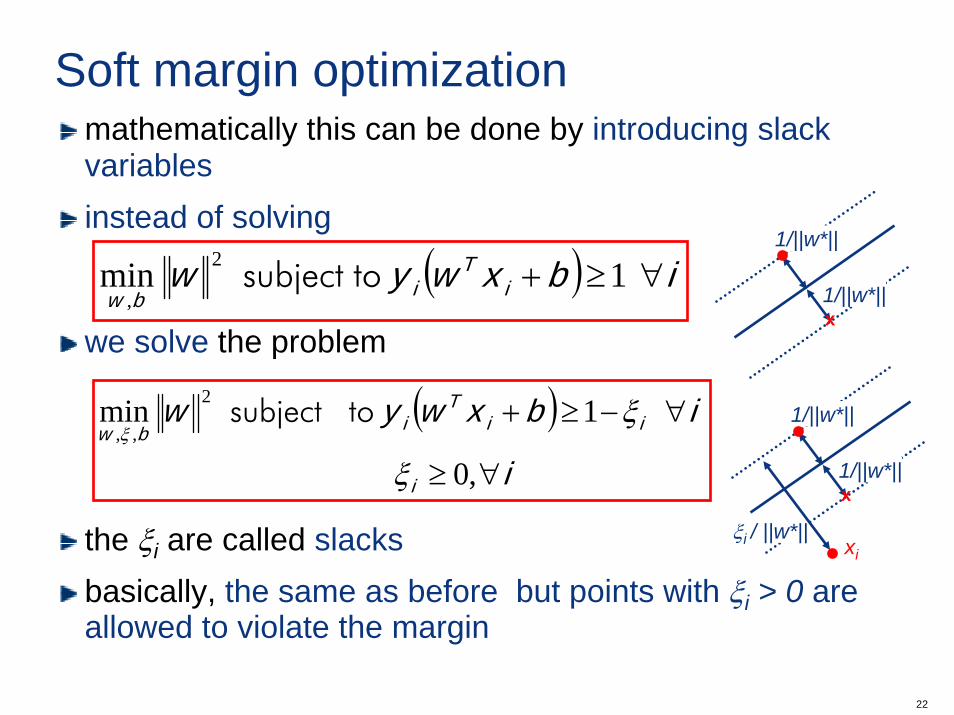
Soft margin optimizationmathematically this can be done by introducing slack variablesinstead of solving
we solve the problem
the ξi are called slacksbasically, the same as before but points with ξi > 0 are allowed to violate the margin
( ) ibxwyw iT
ibw∀≥+ tosubject 1min 2
,
( )i
ibxwyw
i
iiT
ibw
∀≥
∀−≥+
,0
1min 2
,,
ξ
ξξ
tosubject
1/||w*||
1/||w*||
x
ξi / ||w*||xi
1/||w*||
1/||w*||
x
23
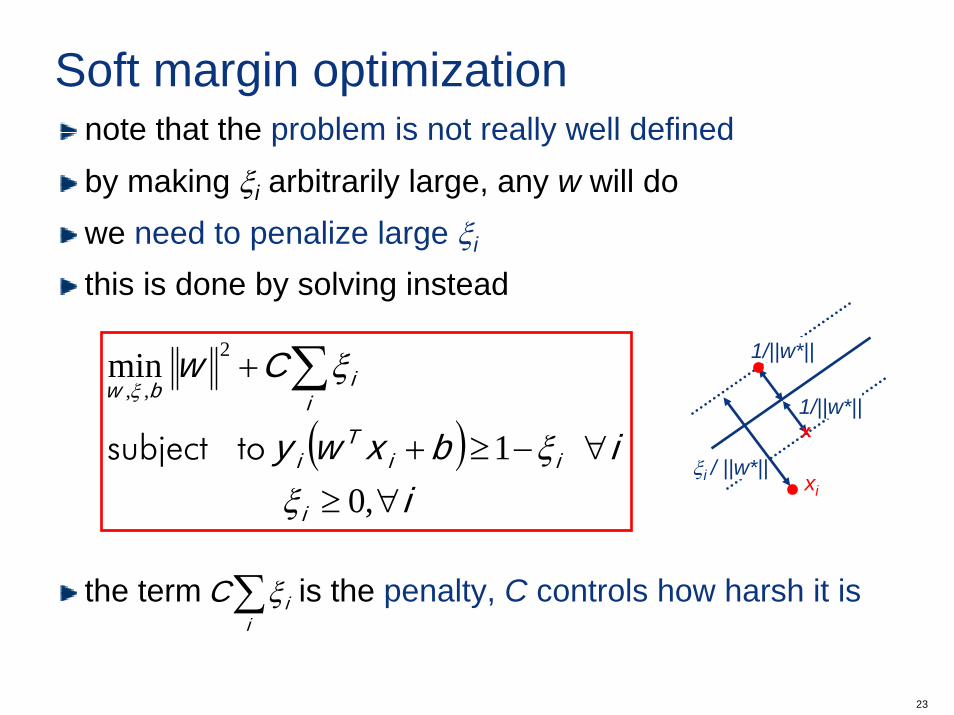
Soft margin optimizationnote that the problem is not really well definedby making ξi arbitrarily large, any w will dowe need to penalize large ξi
this is done by solving instead
the term is the penalty, C controls how harsh it is
( )i
ibxwy
Cw
i
iiT
i
iibw
∀≥∀−≥+
+ ∑
,01
min 2
,,
ξξ
ξξ
tosubject
1/||w*||
1/||w*||
x
ξi / ||w*||xi
∑i
iC ξ
24
The dual problem
αi=0
αi=0
0 < αi < c
*
*
αi = c
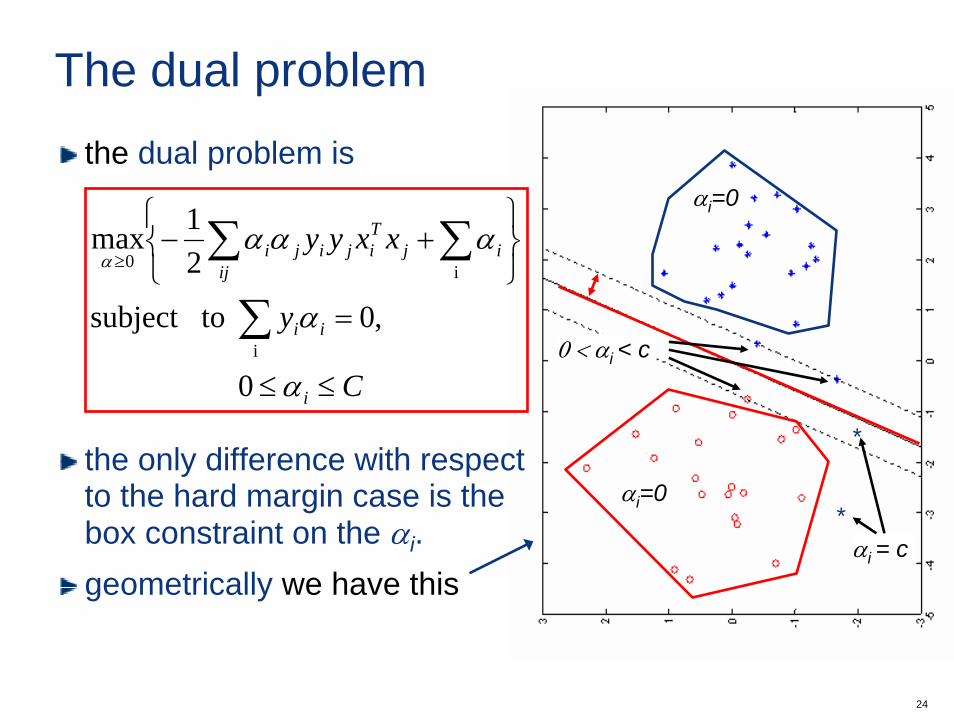
the dual problem is
the only difference with respect to the hard margin case is the box constraint on the αi.geometrically we have this
C
y
xxyy
i
ii
ijTij
ijiji
≤≤
=⎭⎬⎫
⎩⎨⎧
+−
∑
∑∑≥
α
α
αααα
0
,0 tosubject
21max
i
i0
25
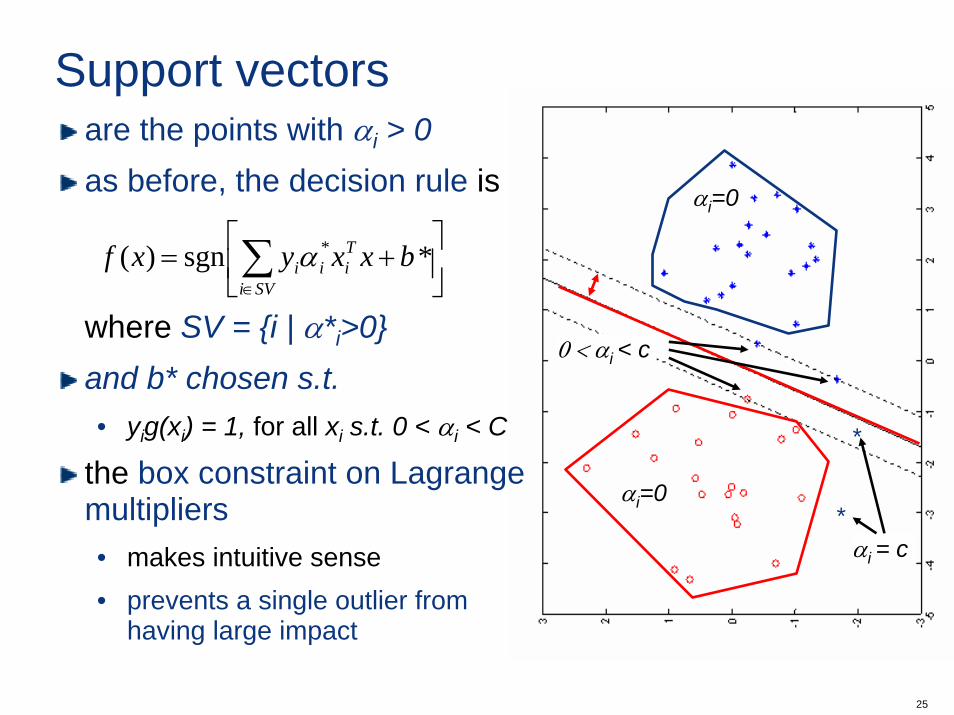
Support vectors
αi=0
αi=0
0 < αi < c
*
*
αi = c
are the points with αi > 0as before, the decision rule is
where SV = {i | α*i>0}and b* chosen s.t.• yig(xi) = 1, for all xi s.t. 0 < αi < C
the box constraint on Lagrangemultipliers• makes intuitive sense• prevents a single outlier from
having large impact
⎥⎦
⎤⎢⎣
⎡+= ∑
∈
*sgn )( * bxxyxfSVi
Tiiiα
26
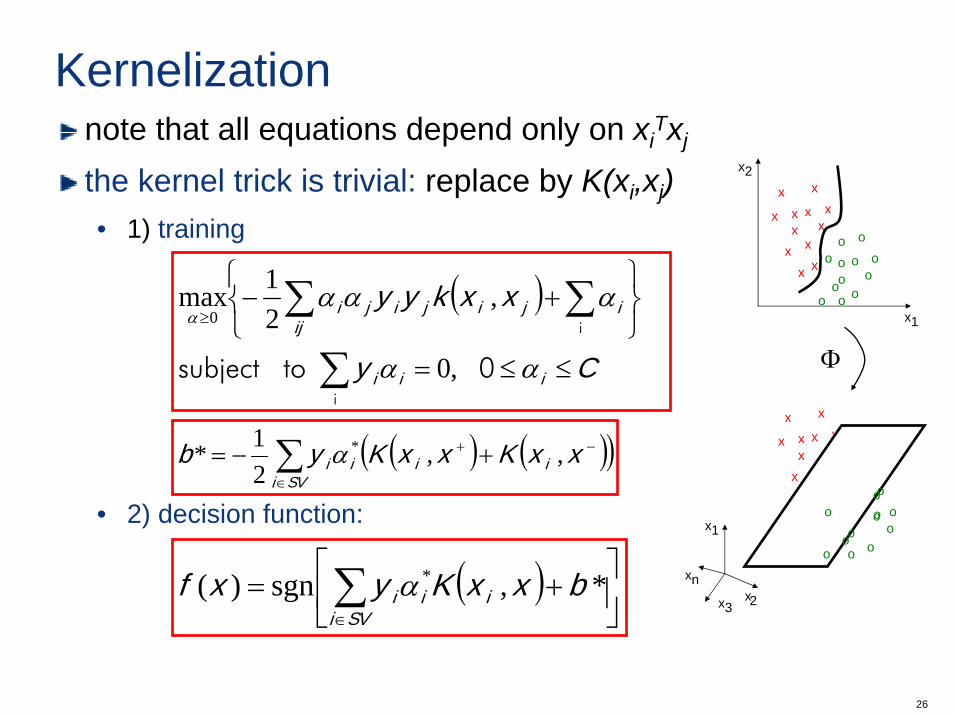
Kernelizationnote that all equations depend only on xi
Txj
the kernel trick is trivial: replace by K(xi,xj)• 1) training
• 2) decision function:
xx
x
x
x
xxx
xx
xx
oo
o
o
ooo
o
oooo
x1
x2
xx
x
x
x
xxx
xx
xx
oo
o
o
ooo
o
oooo
x1
x3x2
xn
Φ
( )
Cy
xxkyy
iii
ijijij
iji
≤≤=⎭⎬⎫
⎩⎨⎧
+−
∑
∑∑≥
αα
αααα
0 tosubject
i
i
,0
,21max
0
( ) ( )( )−+
∈
+−= ∑ xxKxxKyb iiiSVi
i ,,21* *α
( ) ⎥⎦
⎤⎢⎣
⎡+= ∑
∈
*,sgn)( * bxxKyxfSVi
iii α
27
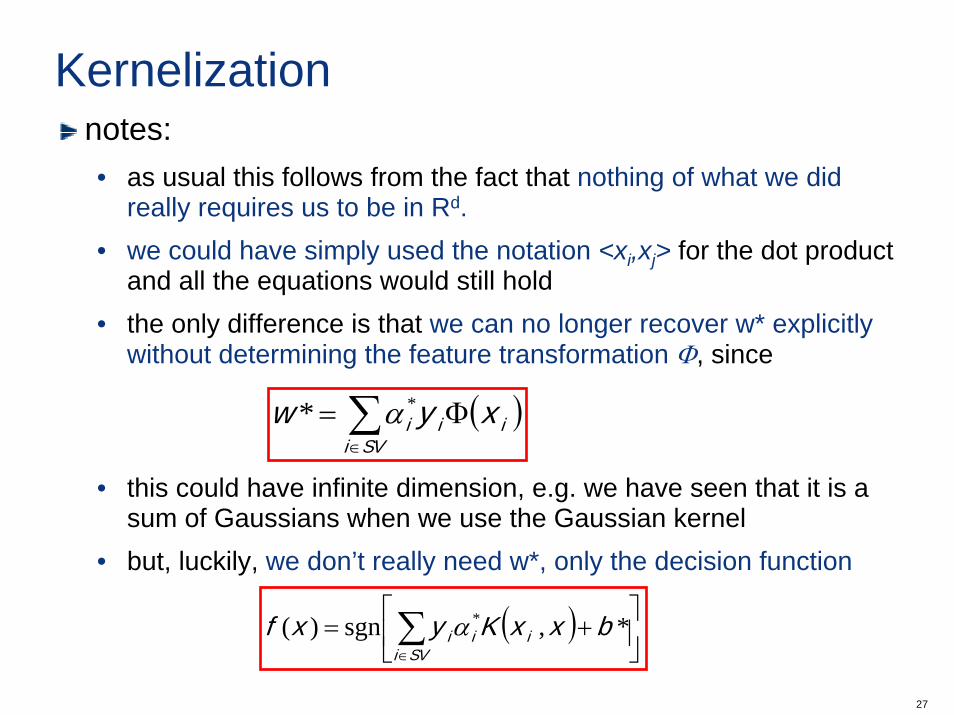
Kernelizationnotes:• as usual this follows from the fact that nothing of what we did
really requires us to be in Rd.• we could have simply used the notation <xi,xj> for the dot product
and all the equations would still hold• the only difference is that we can no longer recover w* explicitly
without determining the feature transformation Φ, since
• this could have infinite dimension, e.g. we have seen that it is a sum of Gaussians when we use the Gaussian kernel
• but, luckily, we don’t really need w*, only the decision function
( )∑∈
Φ=SVi
iii xyw ** α
( ) ⎥⎦
⎤⎢⎣
⎡+= ∑
∈
*,sgn)( * bxxKyxfSVi
iii α
28
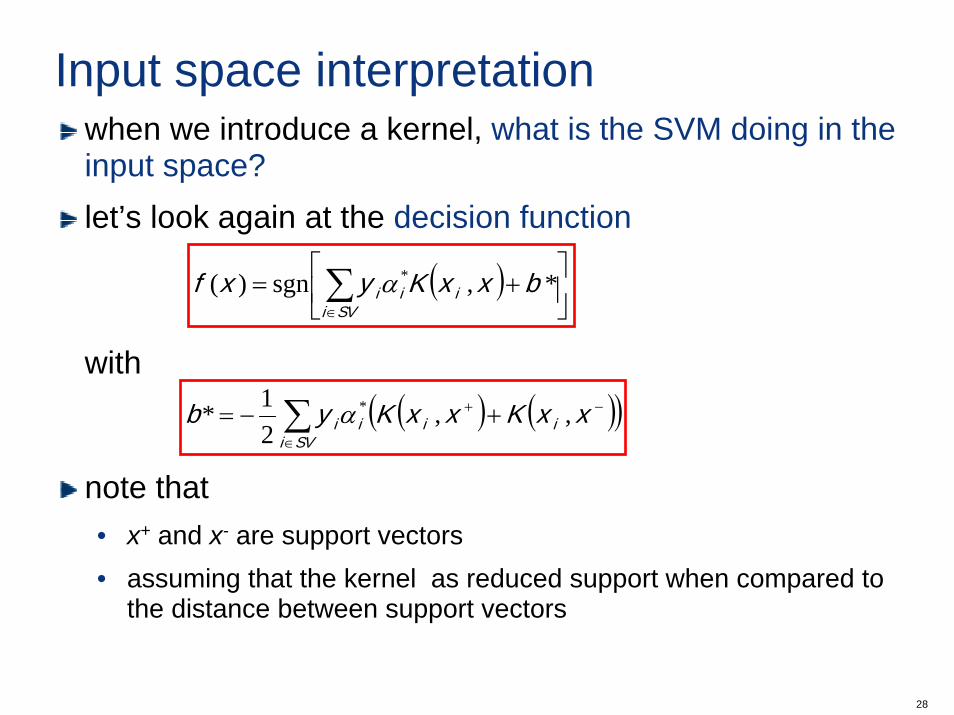
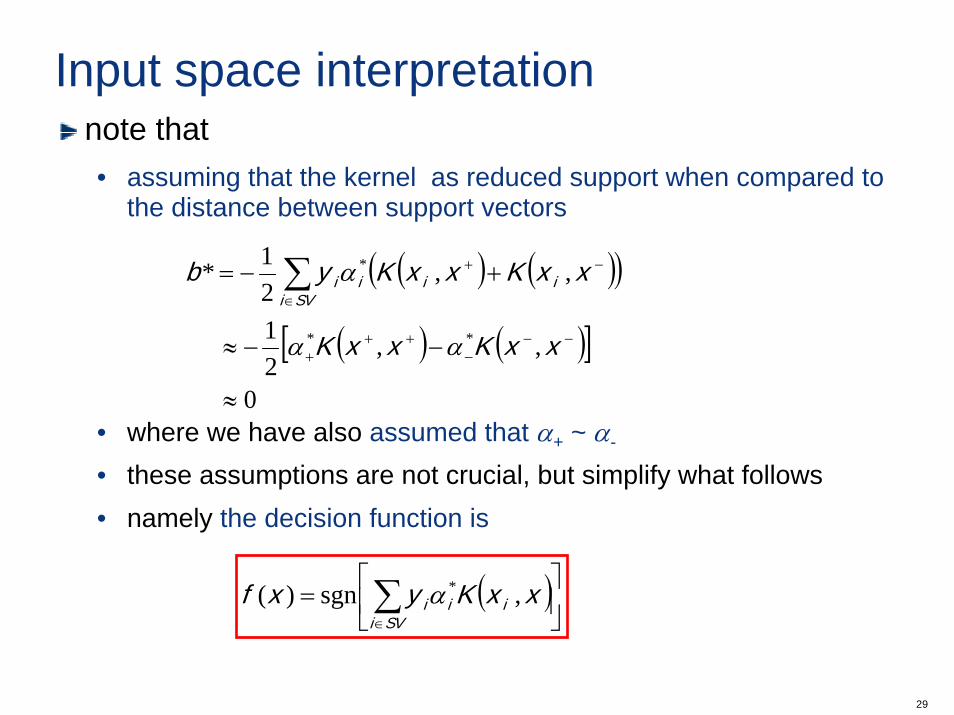
Input space interpretationwhen we introduce a kernel, what is the SVM doing in the input space?let’s look again at the decision function
with
note that • x+ and x- are support vectors• assuming that the kernel as reduced support when compared to
the distance between support vectors
( ) ⎥⎦
⎤⎢⎣
⎡+= ∑
∈
*,sgn)( * bxxKyxfSVi
iii α
( ) ( )( )−+
∈
+−= ∑ xxKxxKyb iiiSVi
i ,,21* *α
29
Input space interpretationnote that • assuming that the kernel as reduced support when compared to
the distance between support vectors
• where we have also assumed that α+ ~ α-
• these assumptions are not crucial, but simplify what follows• namely the decision function is
( )⎥⎦
⎤⎢⎣
⎡= ∑
∈SViiii xxKyxf ,sgn)( *α
( ) ( )( )
( ) ( )[ ]
0
,,21
,,21*
**
*
≈
−−≈
+−=
−−−
+++
−+
∈∑
xxKxxK
xxKxxKyb iiiSVi
i
αα
α
30
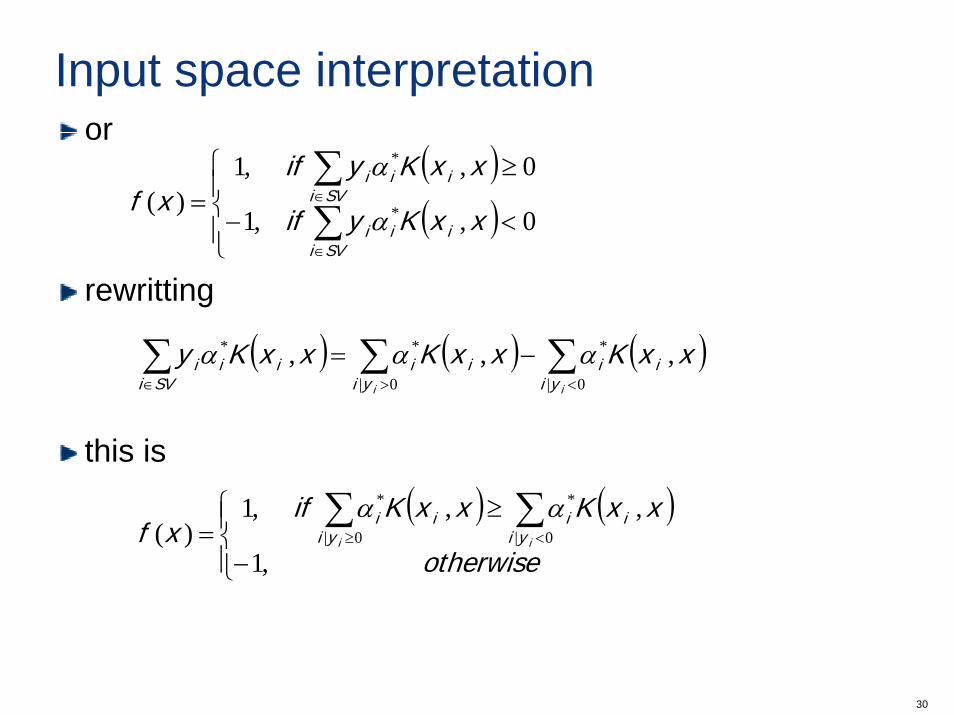
Input space interpretationor
rewritting
this is
( )( )⎪⎩
⎪⎨⎧
<−
≥=
∑∑
∈
∈
0,,1
0,,1)( *
*
SViiii
SViiii
xxKyif
xxKyifxf
α
α
( ) ( ) ( )∑∑∑<>∈
−=0|
*
0|
** ,,,ii yi
iiyi
iiSVi
iii xxKxxKxxKy ααα
( ) ( )⎪⎩
⎪⎨⎧
−
≥=
∑∑<≥
otherwise
xxKxxKifxf ii yi
iiyi
ii
,1
,,,1)( 0|
*
0|
* αα
31
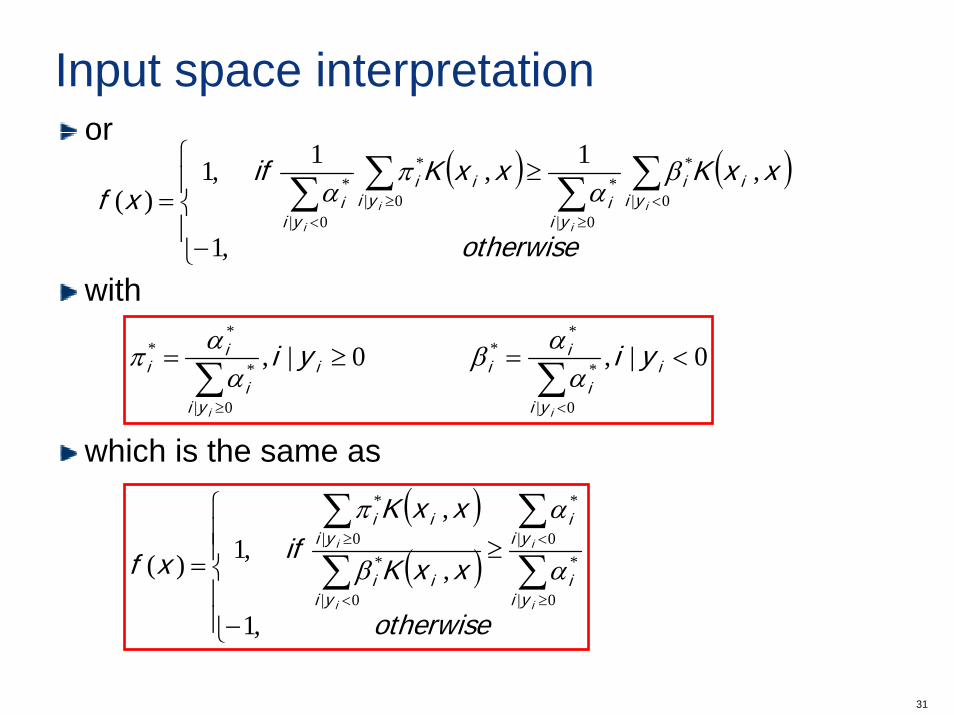
Input space interpretationor
with
which is the same as
( ) ( )⎪⎩
⎪⎨
⎧
−
≥=
∑∑∑∑ <≥
≥<
otherwise
xxKxxKifxf i
i
i
i
yiii
yiiyi
ii
yii
,1
,1,1,1)( 0|
*
0|
*0|
*
0|
* βα
πα
0|,0|,
0|
*
**
0|
*
** <=≥=
∑∑<≥
i
yii
iii
yii
ii yiyi
ii
ααβ
ααπ
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
−
≥= ∑∑
∑∑
≥
<
<
≥
otherwise
xxK
xxKifxf
i
i
i
i
yii
yii
yiii
yiii
,1
,
,,1)(
0|
*0|
*
0|
*0|
*
α
α
β
π
32
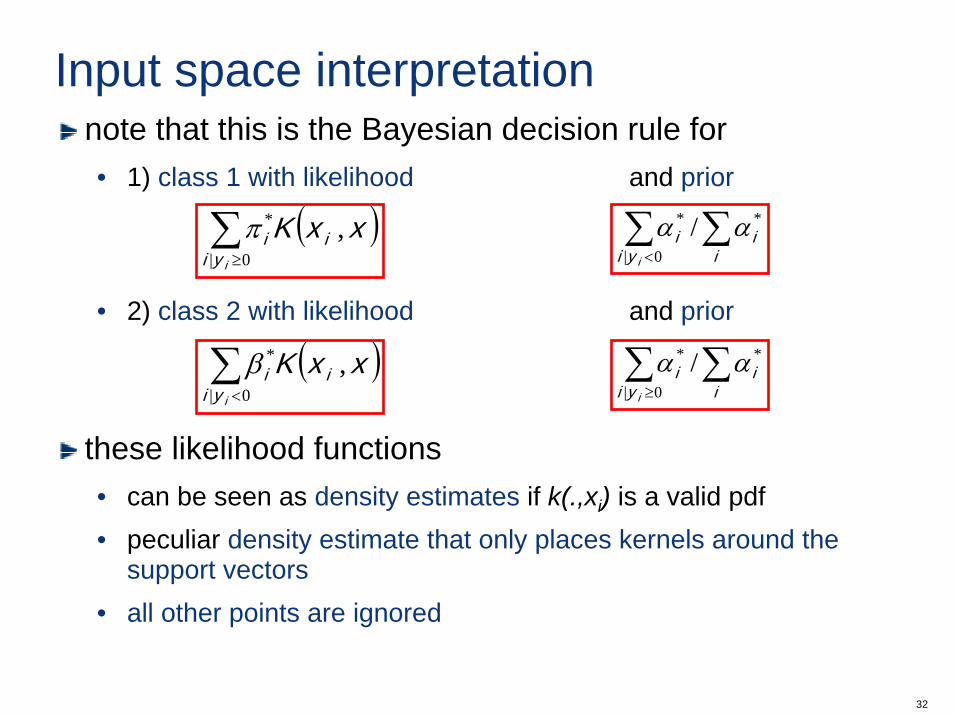
Input space interpretationnote that this is the Bayesian decision rule for• 1) class 1 with likelihood and prior
• 2) class 2 with likelihood and prior
these likelihood functions • can be seen as density estimates if k(.,xi) is a valid pdf• peculiar density estimate that only places kernels around the
support vectors• all other points are ignored
( )∑≥0|
* ,iyi
ii xxKπ ∑∑< i
iyi
ii
*
0|
* / αα
( )∑<0|
* ,iyi
ii xxKβ ∑∑≥ i
iyi
ii
*
0|
* / αα
33
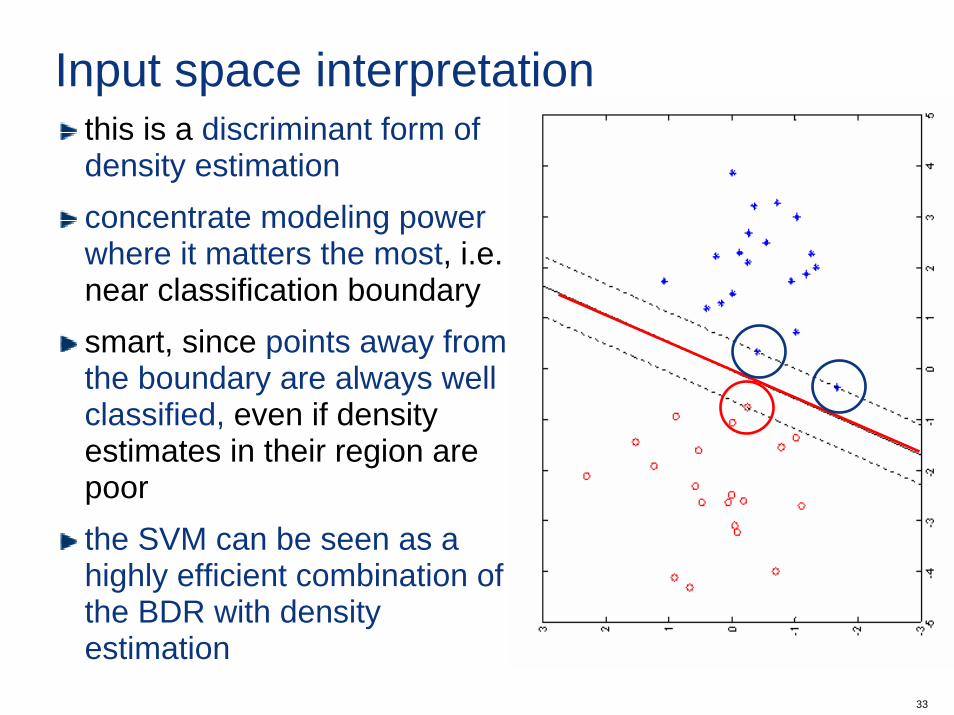
Input space interpretationthis is a discriminant form of density estimationconcentrate modeling power where it matters the most, i.e. near classification boundarysmart, since points away from the boundary are always well classified, even if density estimates in their region are poorthe SVM can be seen as a highly efficient combination of the BDR with density estimation
34
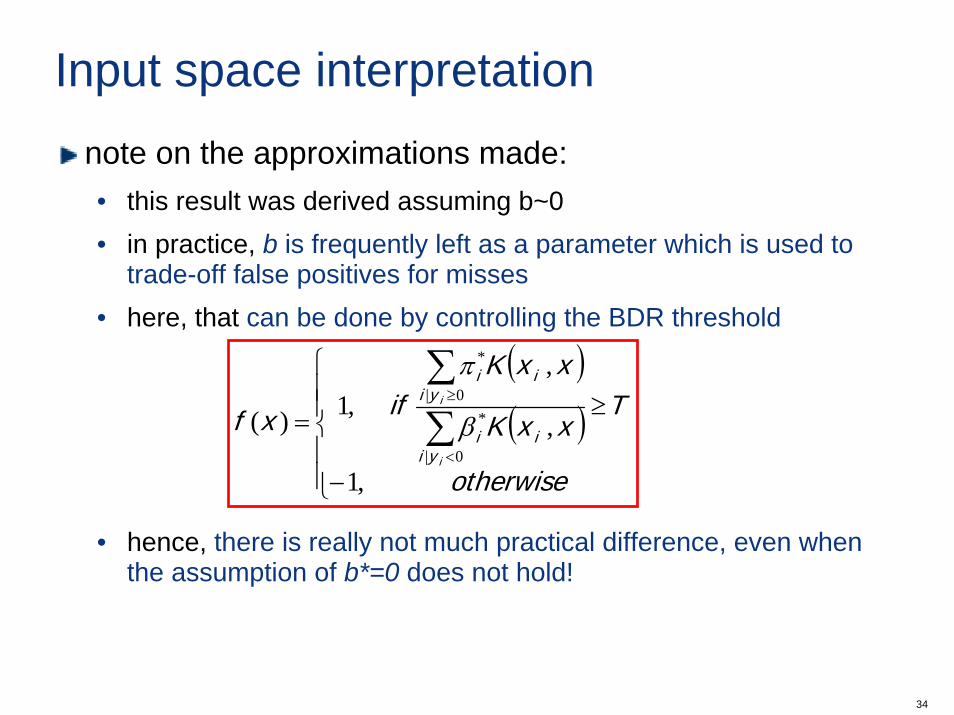
Input space interpretationnote on the approximations made:• this result was derived assuming b~0• in practice, b is frequently left as a parameter which is used to
trade-off false positives for misses• here, that can be done by controlling the BDR threshold
• hence, there is really not much practical difference, even when the assumption of b*=0 does not hold!
( )( )
⎪⎪⎩
⎪⎪⎨
⎧
−
≥= ∑∑
<
≥
otherwise
TxxK
xxKifxf
i
i
yiii
yiii
,1
,
,,1)(
0|
*0|
*
β
π
35
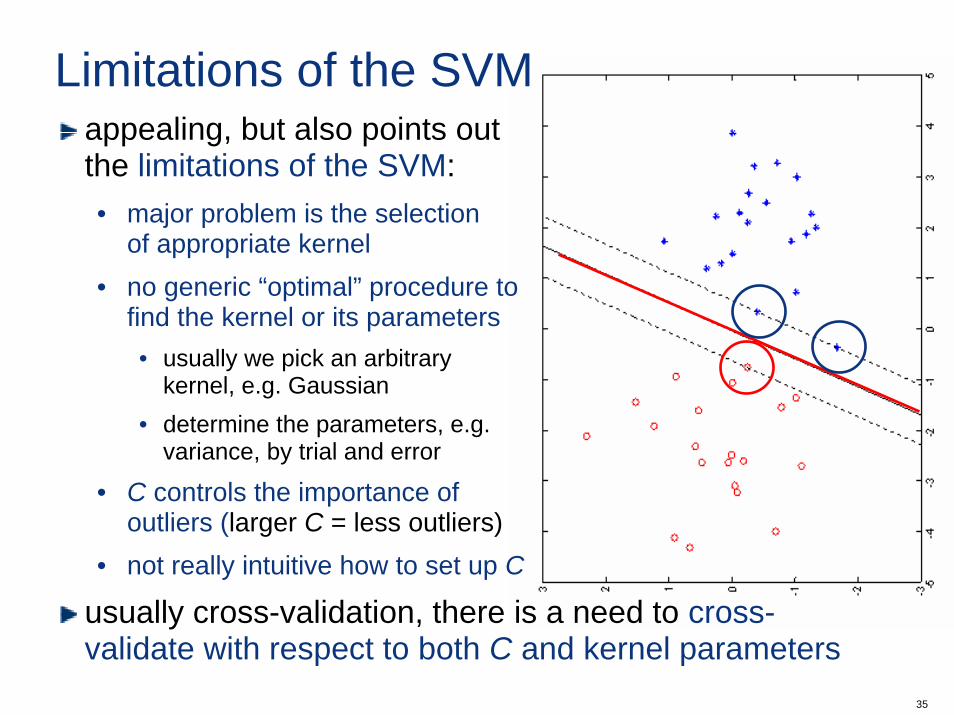
Limitations of the SVMappealing, but also points outthe limitations of the SVM:• major problem is the selection
of appropriate kernel• no generic “optimal” procedure to
find the kernel or its parameters• usually we pick an arbitrary
kernel, e.g. Gaussian• determine the parameters, e.g.
variance, by trial and error
• C controls the importance of outliers (larger C = less outliers)
• not really intuitive how to set up C
usually cross-validation, there is a need to cross-validate with respect to both C and kernel parameters
36
Practical implementationsin practice we need an algorithm for solving the optimization problem of the training stage• this is still a complex problem• there has been a large amount of research in this area• coming up with “your own” algorithm is not going to be
competitive• luckily there are various packages available, e.g.:
• libSVM: http://www.csie.ntu.edu.tw/~cjlin/libsvm/• SVM light: http://www.cs.cornell.edu/People/tj/svm_light/• SVM fu: http://five-percent-nation.mit.edu/SvmFu/• various others (see http://www.support-vector.net/software.html)
• also many papers and books on algorithms (see e.g. B. Schölkopfand A. Smola. Learning with Kernels. MIT Press, 2002)

37





























