Embed Size (px)
Citation preview
TIMING & FREQUENCY
THE ROLE OF GPS INPRECISE TIME ANDFREQUENCYDISSEMINATION
Peter H. Dana
Consultant
Bruce M. Penrod
Austron, Inc.
Peter H. Dana is an independent consultant inelectronic navigation and computer-assistedcartography with an office in Georgetown, Texas.He specializes in software for signal processing,navigation filtering, and position display forLoran-C and GPS receivers. He has a BAfromWesleyan University and is a member of theInstitute of Navigation and the Wild GooseAssociation.
Bruce Penrod is a senior engineer with Austron,lnc., in Austin, Texas, a manufacturer of precisetime and frequency instrumentation systems.Penrod has extensive radio frequency experiencewith precise time and frequency dissemination viaOmega, Loran-C. and GPS, and has designeddisciplining algorithms for steering quartz andatomic clocks from these time and frequencystandards. He holds two patents related todisciplined frequency standards and VLFantennas. He received a BS in electricalengineering from the University of Texas atAustin.
This article describes theGPS time and frequencysignals, the GPS receivertechniques used to extractthose signals, and some ofthe uses for precise time,time interval, andfrequency. Historicalbackground on uses andmethods of measuring timeand frequency is alsoprovided.
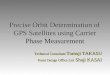
Known primarily as a navigation system, theglobal positioning system is also used to dis-seminate precise time, time intervals, and fre-quency. The GPS carrier signals originatefrom on-board atomic clocks monitored byground control stations, as depicted in Figure1. GPS satellites transmit time signals witheach subframe of data modulated onto the car-rier. While navigation and survey receiversuse GPS time to aid in computation of posi-tion solutions, time and frequency receiversuse GPS satell ite transmissions to control tim-ing signals and oscillators.
TIME, TIME INTERVAL, FREQUENCYTime and time interval are distinct concepts.Time is the marking of an event with respectto a reference origin. A time interval is a mea-surement of duration. The time of an eventmight be measured by hours, minutes, sec-onds, and a calendar date, while a time in-terval might be measured by the number ofseconds between two events.
Frequency is the measure of the numberof events that occur within a time interval,such as the number of oscillations of a volt-age waveform within one second (George Ka-mas and Sandra L. Howe, Time and Fre-quency User's Manual, National Bureau ofStandards Special Publication 559, U.S. Gov-ernment Printing Office, Washington, DC,1979) .
Coordinated Universal Time (UTC) is atime system adopted by many countries in1972. UTC is coordinated by the Bureau In-ternational des Poids et Mesures (BIPM) inFrance and is based on the weighted combi-nation of atomic clocks located around theworld. UTC occasionally changes by the ad-dition of leap seconds. Other time systemsare also used that can be compared withUTe. A system called U'I'l , for example, isrelated to the earth's angular rotation rate andis used by navigators.
base line interferometry uses time-synchro-nized recordings from widely separated radio-astronomy observatories to map celestialradio sources as though from a single enor-mous antenna. Electric power companies usefrequency standards to maintain the 50- or 60-hertz line frequencies. Computer networksneed to synchronize distant nodes for billingand communications switching purposes.
Communications systems use both timeand frequency to maintain carrier frequenciesand data-bit phase timing. Military and bank-ing communications networks have specialtiming requirements for synchronization ofdata encryption and decryption equipment.Frequency standards are required for radioand television stations, as well as for satel-lite communications transmitters. Trackingdeep-space vehicles requires coordinated ob-servations from synchronized ground sta-tions. All of these users require some com-bination of precise time, time interval, andfrequency that attains accuracies measured innanoseconds (10 -9 or billionths of a second).
Users of both precise time and precise fre-quency require precise time intervals asmeasured by the time between periodic pulseedges or waveform zero-crossings. The rela-tionship of these marks to a reference timeis a measure of the phase of the signal.Time and frequency users often have dif-ferent phase stability requirements for timeintervals.
The precise time user may require thetime tagging of events to the 100-nanosecondlevel and maintenance of that accuracy overperiods from seconds to years. Modern digi-tal communication networks use time inter-vals to maintain synchronization betweentransmitter and receiver clocks so that dataframe buffers at the receiver can maintainframe alignment with infrequent "slips" requir-ing retransmission of the data frame. Theseusers are not affected by pulse-to-pulsejitter (phase noise) on the order ofone nanosecond, but they do require that thetime intervals maintain a long-term phasestability.
Precise frequency users require short-termphase stability but may not require long-termphase synchronization. Radar and micro-wave communication systems multiply 5- orlO-megahertz frequency standards up intothe gigahertz regions of the spectrum. Anyphase noise from the frequency standard ismultiplied along with the fundamental fre-quency and appears as noise in the micro-wave carrier. Precise frequency users may re-quire time interval signals with phase noiseon the order of one picosecond (10-12 or onetrillionth of a second) to maintain sufficient
TIME AND FREQUENCY USERSAstronomic observatories use time to recordcelestial events and to perform simultaneousobservations at distant locations. Very long
TIMING & FREQUENCY
GPS monitorand controlstation
GPS time andfrequencyreceiver
Figure 1. GPS time and frequencytransfer
spectral purity and low noise in their trans-mitted signals.
TIME AND FREQUENCY IN HISTORYPeople have marked time by the movementof the sun and other stars, by phases of themoon, by the changing of seasons, and bythe passing of generations. Time intervalshave been measured by sand-filled hourglasses, water clocks, and mechanical de-vices. The frequencies of musical instru-ments are tuned by comparison to tuningforks and pitch pipes.
History has recorded inventive examplesof time, time interval, and frequency mea-surement. As early as 1000 B.C., the Chi-nese made frequency standards by countingthe number of bean kernels that filled thepipe of a wind instrument. For pipes of thesame diameter, the frequency (pitch) wasspecified by the number of kernels requiredto fill the pipe. Time intervals were meas-ured in 13th-century Spain by burning can-dles on lever arms that lost weight as theyburned, moving the arm to display the pas-sage of time.
The Chinese burned incense clocks thatmarked time by changes in the scent givenoff by layers of incense impregnated with dif-ferent oils. Cassini's tables of predictedeclipses of the moons of Jupiter were used toprovide position-independent time measure-ments, accurate to a few minutes, for the map-ping of France in 1679. Harrison's chronome-ter, perfected in 1759, allowed time transfers
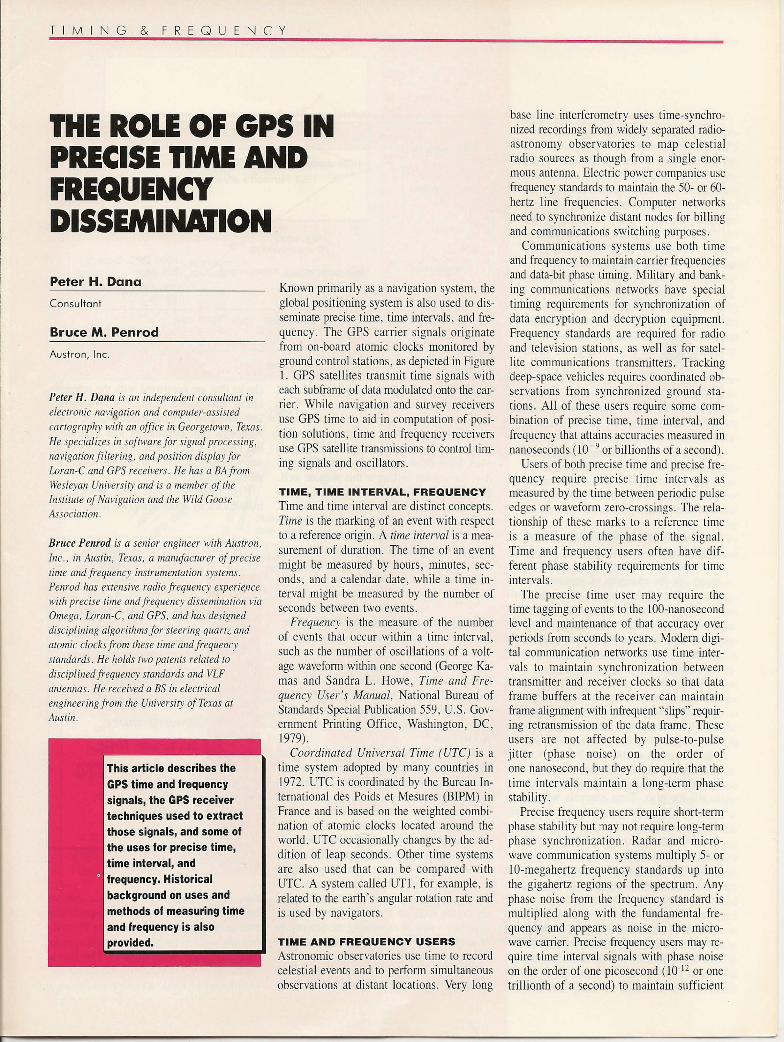
1000 seconds• 1679 Jupiter's moons - 100 seconds
~ 1759 Harrison's chronometer - 10 seconds1 second
1 millisecond.1923 WWV -30 microseconds
1 microsecond:>-... 1990 GPS Block II -
1960 cesiums - 1 microsecond "". 500 ns1985 GPS Block 1-100 ns
1 nanosecond1650 1700 1750 1800 1850 1900 19502000
Figure 2. Time dissemination techniques
aboard ship with accuracies in the lO-secondrange over periods of weeks.
The simple sundial provides examples oftime and time-interval measurement prob-siems for different users. If a user wants tomark local noon at the same location eachday, the sundial will serve this purpose well.Because users at different locations do notmark the same moment as noon, however,they cannot synchronize events using thesundial without performing extensive calcula-tions from position and orbital data. The sun-dial can measure local time and time inter-val periods of 24 hours but is not well suitedfor linking two events at distant locations.
clocks that are compared with the referenceclock, transported to the remote location,and compared with the remote station clock.Although time-consuming and expensive,this method does provide time transfer in theone-microsecond (10-6 or one-millionth of asecond) range.
High-frequency radio time services aremaintained by more than two dozen coun-
For the most part,the history of timedissemination hasbeen a steadyadvancementtoward moreaccurate timetransfer betweendistantlocations.
TIME, FREQUENCY DISSEMINATIONFor the most part, the history of time dissemi-nation has been a steady advancement to-ward more accurate time transfer betweendistant locations, as illustrated in Figure 2.Current time and frequency disseminationtechnologies in wide use include atomic stan-dards and both high- and low-frequency ra-dio services.
Atomic clocks are based on the naturalatomic oscillations of gases in resonant cavi-ties. When isolated from magnetic fields, ru-bidium and cesium gases will resonate at spe-cific frequencies under controlled conditions.These frequencies are so accurate that since1967 the length of the second has been de-fined as the frequency of a specific resonantmode of the cesium atom, producing9,192,631,770 oscillations in one second.The frequency accuracies of cesium clocksare on the order of 2 x 10-12. (This notationis simply a way of expressing the percentageof accuracy: 1 x 10-2 is the equivalent of1.0 percent error.)
Time and frequency are transferred fromreference standards using portable cesium
tries. Time, frequency, and time intervaldata can be derived from these signals withtime accuracies ranging from 1 to 10 milli-seconds and fractional frequency accuraciesfrom 1 x 10-10 to 5 X 10-12 The UnitedStates National Institute of Standards andTechnology (NIST), formerly the National
TIMING & FREQUENCY
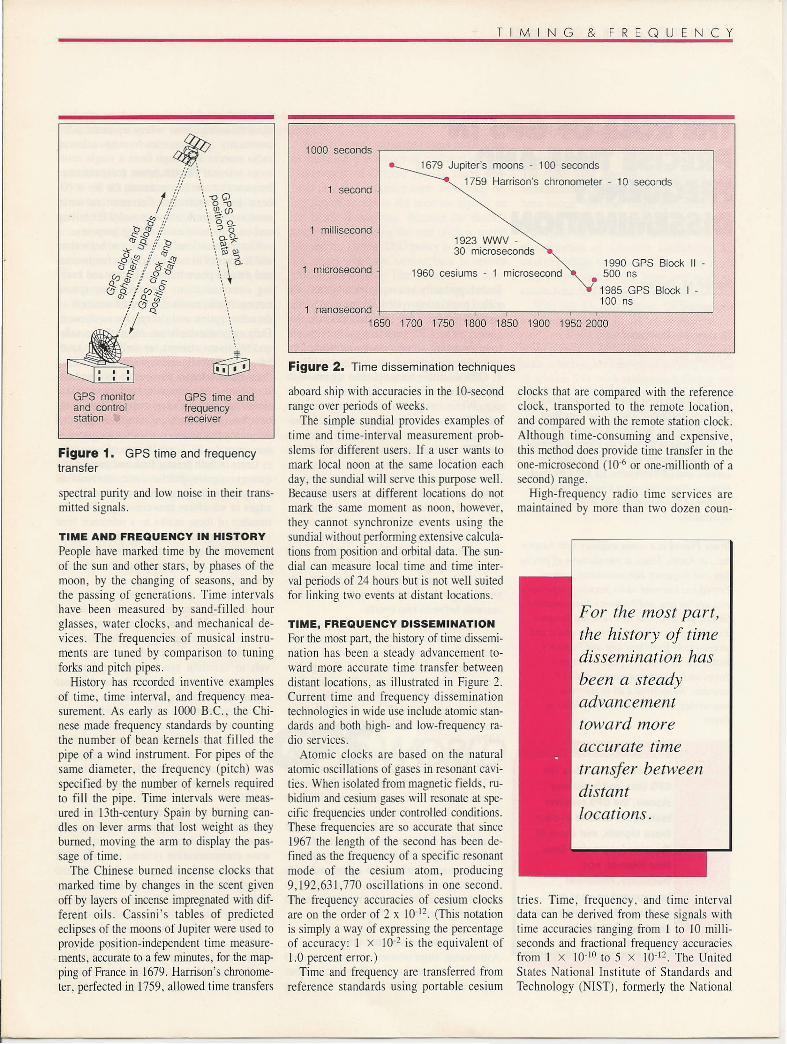
Subframe If- '-11# One subframe, 300 data bits, 6 seconds
1~ SV clock correction data IT
2~ SV ephemeris data
IOne data frame
3 ~ SV ephemeris dataI
1500 data bits30 seconds
4 25~ Various data (GPS-UTC: p. 1S) Ipages
115 25
~ SV almanac datapages
It One word, 30 bits, 24 data, 6 parity-;j
TLMIS-bit preamble I data bits ~• (telemetry word)
HOW I' ';:; ,<Of!" I "'" .. I parity" Iclata bits(handover word) 17-M ti!ile €If wee~"1 ...,
Figure 3. GPS data format
Bureau of Standards operates the WWV andWWVH stations that broadcast continuoustime and frequency signals at 2.5,5, 10, and15 megahertz (and 20 megahertz onWWVH).
Omega navigation and VLF (very low fre-quency) communication signals cover muchof the globe and can, with careful attentionto ionospheric variations and modal interfer-ence, be used for time and frequency deter-mination in the 2- to lO-microsecond range.These systems can also help us determinefrequency to several parts in 10-1I The diur-nal effect on both signals due to the iono-sphere limit the accuracy of these low-frequency systems.
Loran-C is another method used to dissemi-nate both time and frequency information. De-signed primarily as a navigation system,Loran-C signals use a 100-kilohertz carriermodulated by precisely controlled pulses thatpropagate as groundwaves with stable phaseover distances of thousands of kilometers.Those Loran-C stations that are monitoredby the U.S. Naval Observatory (USNO) canprovide frequency accuracies of 1 x 10-12.Time intervals can be obtained from Loran-C, and UTC can be derived with accuraciesof several microseconds using published cor-rections. Loran-C stations with varying timeand frequency accuracy control are available
over much of the northern hemisphere.A disciplined frequency standard is a mi-
croprocessor-controlled system that locks anoscillator to an external source while "learn-ing" the offset and aging rate - or drift -of the internal oscillator. When the externalreference is removed or fails, the disciplinedfrequency standard continues to apply these"learned" corrections to the internal oscilla-tor. A system using Loran-C monitored bythe USNO as the frequency standard and a ce-sium atomic clock as the disciplined internaloscillator can maintain accuracies of a fewparts in 10-12 (Robert F. Ellis, Austron Tim-ing Reference Handbook, Austron, Inc., Aus-tin, TX, 1988).
GPS CAPABILITIESGPS is capable of global time and frequencydissemination 24 hours a day. The frequencyaccuracies from the system can rival the bestLoran-C stations, and the timing accuraciescan be in the 100-nanosecond range. No pre-vious system has provided this potential com-bination of accuracy and availability. GPShas proven to be so successful that GPS re-ceivers are now used to 'help control someOmega and Loran-C transmitters.
GPS time is a precise time standard that isrelated to UTe. The major difference is thatGPS time is a continuous time usually mea-
sured in weeks and seconds from the GPStime zero point of midnight, January 5,1980. Controlled by UTC, GPS time is notcorrected with leap seconds, and so is cur-rently ahead of UTC by six seconds (\990).With the exception of the integer number ofleap seconds, GPS time is steered to withinone microsecond of UTC with the differencereported in the GPS navigation message to aprecision of 90 nanoseconds.
Signal and data processing. To set a GPS re-ceiver to GPS time, the receiver must firsttrack a GPS satellite, or space vehicle (SV),on one or both of the Lband carriers. Afterlocking on to the spread spectrum carrier byapplying the local pseudorandom noise(PRN) code at the correct time, the 50-hertzdata stream containing the navigation mes-sage can be decoded. SV time - the time asgiven by an individual satellite's clock -can be recovered by noting the start time ofthe PRN code necessary to achieve lock.
Time intervals at the receiver can be pro-duced by the l-millisecond repetition rate of
No prior system hasprovided thispotentialcombination ofGPS accuracy andavailability .
the coarse acquisition (CIA) PRN code.Time tagging of each millisecond in SV timeis accomplished by extracting the week num-ber (WN) and time of week (TOW) countfrom the navigation message (ICD-GPS-200,Navstar GPS Space Segment/NavigationUser Interfaces, 1987). Figure 3 shows partof the data frame format of the GPS naviga-tion message.
A 300-bit subframe of data bits is transmit-ted every six seconds by a satellite. Eachsubframe is marked by a preamble and par-ity bits in fixed locations. For eachsubframe, a space vehicle transmits a TOWcount that increments by one six-second unit.The time of applicability for that TOW is the
TIMING & FREQUENCY
THE TIMING SUBCOMMITTEE OF THE CIVIL GPS SERVICE STEERING COMMITTEE
The Timing Subcommittee of the CivilGPS Service Steering Committee hasbeen working for several years to deter-mine the requirements and needs of thecivilian timing community for GPS infor-mation, the availability of GPS timing in-formation and how it can be dissemi-nated. The subcommittee is chaired byDavid W. Allan of the Time and Fre-quency Division of the National Instituteof Standards and Technology in Boulder,Colorado, and co-chaired by Wlodzim-ierz Lewandowski of the Time Section ofthe Bureau International des Poids etMesures (BIPM) in France. Other fre-quent participants in subcommittee meet-ings are representatives of the u.S.Naval Observatory, the aval ResearchLaboratory, the Jet Propulsion Labora-tory (JPL) and private sector companiessuch as AT&T, Duns et, and the powerindustry.
Timing experts believe GPS offers amuch improved means for taking advan-tage of high accuracy atomic clocksaround the world. The subcommittee'swork is in support of communicatingtime and frequency between national andinternational timing cernters, the JPL'sDeep Space etwork, the timing for mil-lisecond pulsars, and several other indus-trial calibration laboratories and serviceorganizations.
A major concern of the panel is the ex-tent to which selective availability (SA)and anti-spoofing (A-S) will degrade theaccuracy of the GPS system and createcommon-view time-transfer errors. A re-cent study by William Klepczynski, dep-uty director of the Time Service Depart-ment of the U. S. aval Observatory,states that for at least 80 percent of the
CIA code start time that occurs on the finaldata bit transition at the start of the next 300-bit subframe. The number of seconds repre-sented by a TOW starts at zero on the GPStime Saturday midnight and continues to afull week of 604,799 seconds before being re-set to zero.
To set precise time, the three-dimensionalposition of the receiver must be known. A po-sition error of one meter translates to aboutthree nanoseconds of time error and about amillihertz of frequency error. Most special-purpose time and frequency receivers requiresome independent position estimate toachieve the full potential of GPS. Once re-
turung community, the negative effectsof SI A can be drastically reduced bydaily averaging ("smoothing"); evengreater accuracy can be achieved withthree-day "smoothing." Accuracies of 50-100 nanoseconds are acceptable for mostpurposes such as earthquake monitoring,mineral research, and general navigation.To benefit from this smoothing, anatomic clock is needed as a reference.
However, the high precision users inthe timing community remain concernedabout the impact of SA on the GPS sig-nal. This includes those involved withthe JPL's deep space network, millisec-ond pulsar timing, and the accurate timeand frequency transfer from 1ST toother government laboratories, among oth-ers. Allan recently conducted a test usingone of the Block IT GPS satellites to com-pare the clocks between NIST andUSNO and between NIST and the ParisObservatory in the common-view modein which the satellite clock errors cancel.He measured only two nanoseconds andseven nanoseconds, respectively, on theresiduals over the three-month test periodwith SA turned on.
Regardless of these very encouragingresults, Allan believes that SA can havea major impact on nanosecond-level ac-curacies, and is participating in an inter-national effort to test all GPS Block ITsatellites in this regard. The Timing Sub-committee is collaborating with the Na-tional Geodetic Survey to obtain preciseephemeris data with only a two-week de-lay to help reduce errors introduced bySA to better than could be obtained withthe Block I satellites if used in the com-mon-view mode.
Because time-transfer issues are inter-
ceiver position is established, the orbitalephemeris in the navigation message is usedto compute the SV position at the moment intime when a particular CIA code millisecondstart time was transmitted.
SVtime. The time of transmission from a par-ticular space vehicle is known as SV time.SV time at the receiver must then be cor-rected for the errors in the SV clock with re-spect to GPS time and for periodic relativis-tic effects. The SV clock error is transmittedin each data frame by a set of polynomial co-efficients. The relativistic correction is com-puted from the SV orbital parameters nor-mally used for SV position determination.
national in scope, Allan as chairman ofthe Timing Subcommittee is calling onDr. Bernard Guinot, director of the TimeSection of the BIPM, to set up a commit-tee of experts to study questions relatedto international time accuracy. One taskof this group is to prepare standards forGPS receiver software and the consistentuse of fundamental constants. The BIPMis working on developing an accurate co-ordinate reference frame for GPS. Lewan-dowski reported at the last CGSSC meet-ing that the ITRF (international terrestrialreference frame) is more accurate thanthe current reference system used by theDepartment of Defense, WGS 84. Follow-ing the suggestion of the BIPM, all na-tional timing centers contributing to Inter-national Atomic Time (TAD and to UTCchanged their GPS receiver coordinatorfrom WGS84 to ITRF on June 12.
Because of the effects of SA on GPS,some have suggested the use of the So-viet Union's GLONASS system. At anApril meeting in Paris, the ConsultativeCommittee for the Definition of the Sec-ond decided to use GPS and GLONASSto communicate frequency and time froma primary standard laboratory nearMoscow (VNIIFTRI); this would tieMoscow into the international time net-work using GLONASS in the common-view mode between VNIIFTRI and theUniversity of Leeds and GPS in the com-mon-view mode between Leeds and theBIPM.
For more information about the activi-ties of the Timing Subcommittee, contactKaren Van Dyke at (617)494-2131.
Jill Wechsler
The true GPS time of transmission is theresult.
Path delay computations. The total signal pathtransmission delay computation begins withthe range from the SV to the receiver. Usingthe speed of light, one can convert the rangeto a time delay. This delay is then correctedfor the ionospheric delay using a model pro-vided in the navigation message, for the"Sagnac" effect (the result of transmission ina rotating inertial reference system), and forhardware delays in cables and receiver cir-cuitry. The difference between the computedand measured millisecond time marks willgive the relationship between the receiver
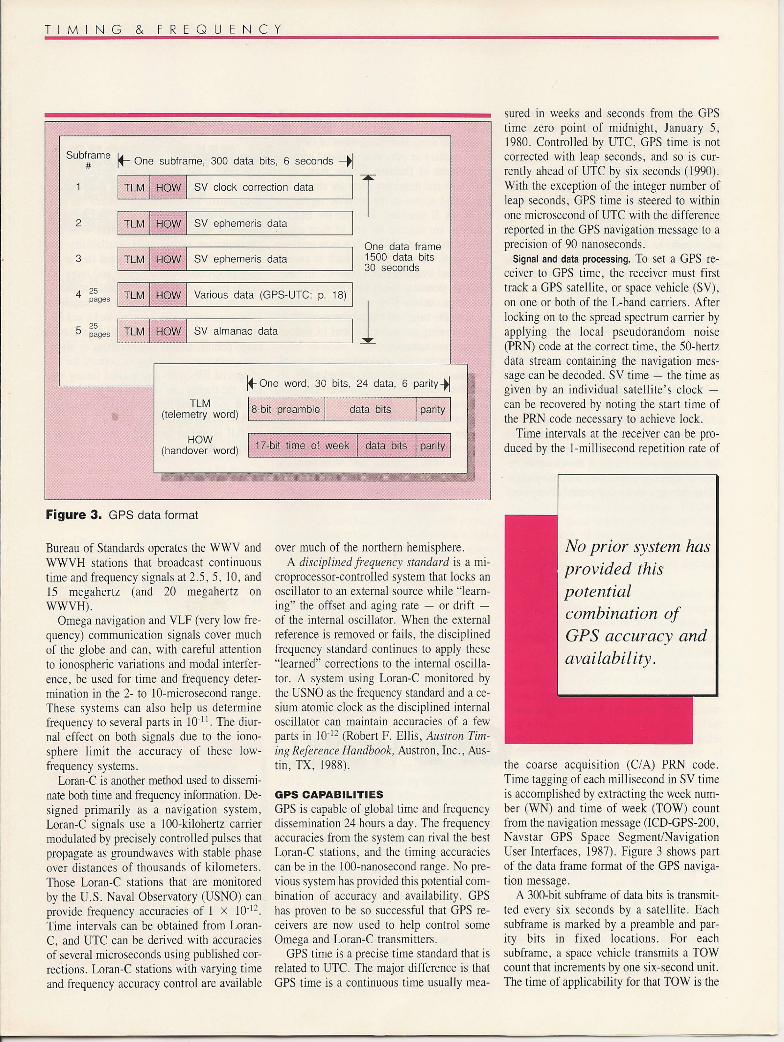
5 10Days
Standarddeviation: -- Linear regression
with respe-ct tocesium standarddisciplin6(J byl.oran-C
~-" • /: \\~ 00
/ /" o1j' i \%($);>.. 0 -: R' : \0 '*
R'V :t>(:} / 'iP ClJ ! \'::> <6'If. ~o oed' rrr: \0- l'
oeJ:- v~/ 0~ t5 ! \~I><
f? ~(i'~,/ 0° -.>:' si \~\"o-0- e}' --- (}:- g "'": \",<:,/' (p (} o'il;! Reference-GPS \ex, c: . ,
/' ~-j Go Q.:' time error \
~
,,/(j &'8! ,''''''' -, \. / / /"'Telephone or ~,!/ radio link lD:[!1}J
: : : @ GPS receiverand local clockcorrected byreference-GPStime error
•
GPS monitor andcontrol station
15
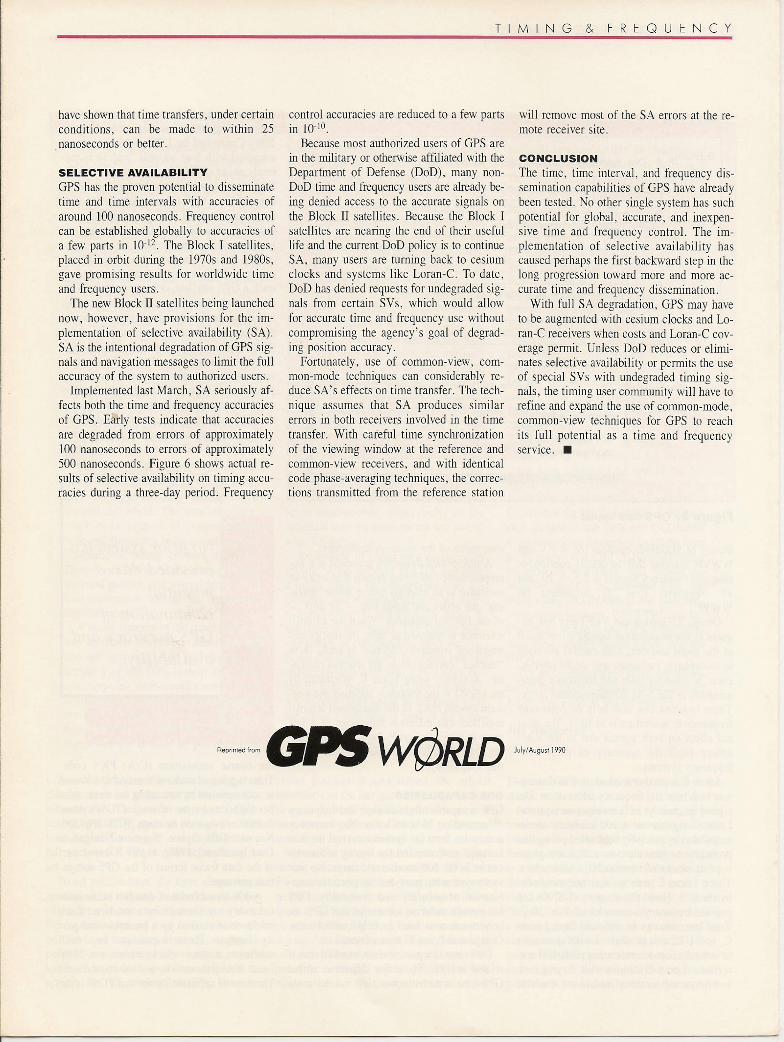
2.78 days - tracking Block Iand Block II SVS to control1PPS ' referenced to a cesiumclock disciplined by Loran-C
clock and GPS time.Timeand timeintervalsignals.Once the relation-
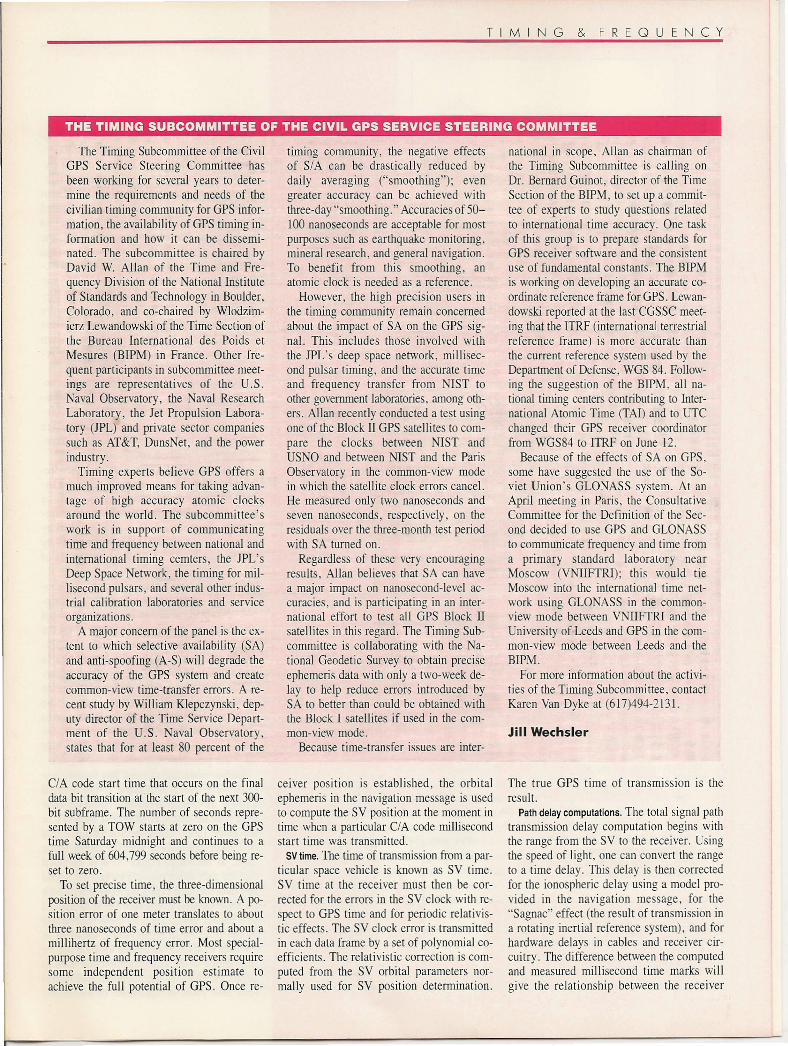
ship between the receiver clock and GPStime is established, time or time interval sig-nals can be produced by the receiver. Syn-chronization between receivers at differentlocations can be established and maintainedusing GPS time. If time signals are requiredto maintain synchronization with UTC, theUTC correction in the navigation messagecan be applied, and time and time-interval sig-nals, such as one-pulse-per-second (lPPS) sig-nals, can be set and maintained to UTC. Fig-ure 4 compares 15 days of IPPS control bythree different GPS receivers. The receiverswere measured against a reference cesiumclock disciplined by a Loran-C timing re-ceiver.
The accuracy of GPS time signals is re-lated to the ability of the receiver to accu-rately track the received CIA PRN code. Ac-curacies in the 100-nanosecond range arepossible with undegraded GPS signals and cor-rect receiver position.
Frequency control. Users can establish fre-quency control by steering an oscillator us-ing integrated code-phase measurements orby directly measuring the SV carrier fre-quency. Carrier tracking is accomplished byphase locking to the de-spread carrier and bymaking accurate frequency measurements ofthe received carrier.
The transmitted carrier signals are con-trolled by on-board atomic clocks. A Dop-pler shift in the received carrier results fromthe changing range to the receiver from themoving Sv. The difference between pre-dicted and measured Doppler frequencies ina stationary receiver is the result of the re-ceiver oscillator error. A direct computationof the error in the receiver clock can bemade and used to adjust the oscillator or toreport the oscillator frequency error to theuser. Frequency accuracies of a few parts in10-12 are possible with undegraded signals.
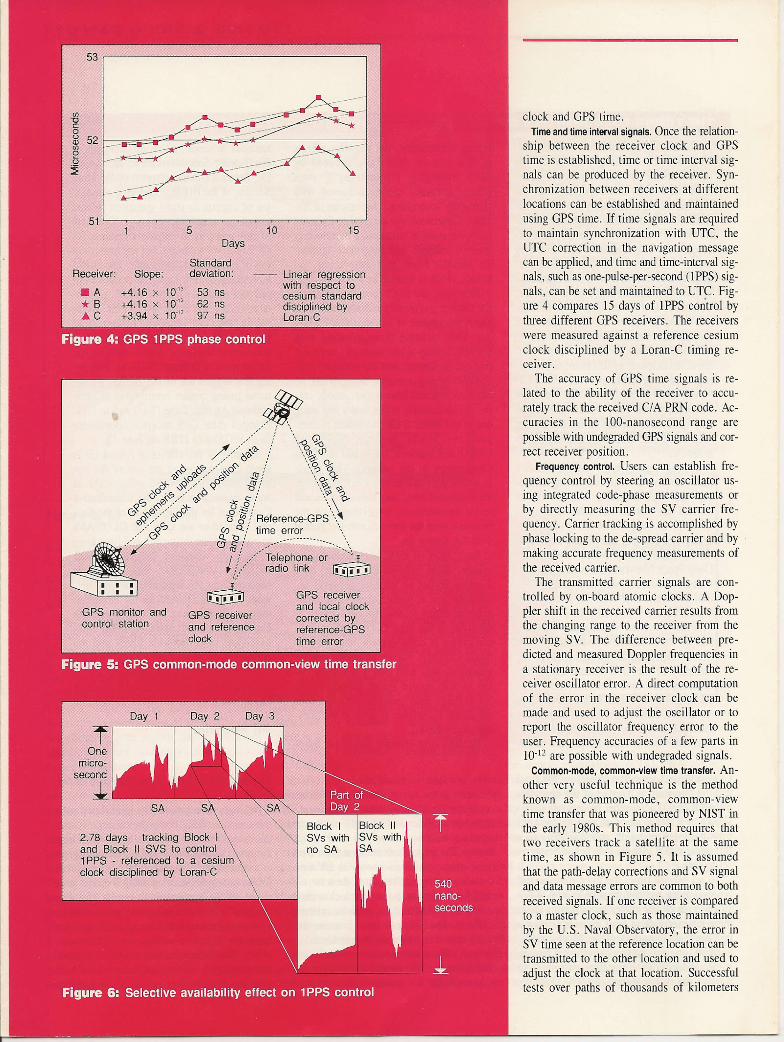
Common-mode,common-viewtime transfer. An-other very useful technique is the methodknown as common-mode, common-viewtime transfer that was pioneered by NIST inthe early 1980s. This method requires thattwo receivers track a satellite at the sametime, as shown in Figure 5. It is assumedthat the path-delay corrections and SV signaland data message errors are common to bothreceived signals. If one receiver is comparedto a master clock, such as those maintainedby the U.S. Naval Observatory, the error inSV time seen at the reference location can betransmitted to the other location and used toadjust the clock at that location. Successfultests over paths of thousands of kilometers
TIMING & FREQUENCY
have shown that time transfers, under certainconditions, can be made to within 25nanoseconds or better.
SELECTIVE AVAILABILITYGPS has the proven potential to disseminatetime and time intervals with accuracies ofaround 100 nanoseconds. Frequency controlcan be established globally to accuracies ofa few parts in 10-12 The Block I satellites,placed in orbit during the 1970s and 1980s,gave promising results for worldwide timeand frequency users.
The new Block II satellites being launchednow, however, have provisions for the im-plementation of selective availability (SA).SA is the intentional degradation of GPS sig-nals and navigation messages to limit the fullaccuracy of the system to authorized users.
Implemented last March, SA seriously af-fects both the time and frequency accuraciesof GPS. Early tests indicate that accuraciesare degraded from errors of approximately100 nanoseconds to errors of approximately500 nanoseconds. Figure 6 shows actual re-sults of selective availability on timing aCCLl-racies during a three-day period. Frequency
control accuracies are reduced to a few partsin 10-1°.
Because most authorized users of GPS arein the military or otherwise affiliated with theDepartment of Defense (DaD), many non-DaD time and frequency users are already be-ing denied access to the accurate signals onthe Block II satellites. Because the Block Isatellites are nearing the end of their usefullife and the current DoD policy is to continueSA, many users are turning back to cesiumclocks and systems like Loran-C. To date,DaD has denied requests for undegraded sig-nals from certain SVs, which would allowfor accurate time and frequency use withoutcompromising the agency's goal of degrad-ing position accuracy.
Fortunately, use of common-view, com-mon-mode techniques can considerably re-duce SA's effects on time transfer. The tech-nique assumes that SA produces similarerrors in both receivers involved in the timetransfer. With careful time synchronizationof the viewing window at the reference andcommon-view receivers, and with identicalcode phase-averaging techniques, the correc-tions transmitted from the reference station
will remove most of the SA errors at the re-mote receiver site.
CONCLUSIONThe time, time interval, and frequency dis-semination capabilities of GPS have alreadybeen tested. No other single system has suchpotential for global, accurate, and inexpen-sive time and frequency control. The im-plementation of selective availability hascaused perhaps the first backward step in thelong progression toward more and more ac-curate time and frequency dissemination.
With full SA degradation, GPS may haveto be augmented with cesium clocks and Lo-ran-C receivers when costs and Loran-C cov-erage permit. Unless DaD reduces or elimi-nates selective availability or permits the useof special SVs with undegraded timing sig-nals, the timing user community will have torefine and expand the use of common-mode,common-view techniques for GPS to reachits full potential as a time and frequencyservice .•