Embed Size (px)
Citation preview

THE SO(3)-REPRESENTATION SPACES OF THE FUNDAMENTALGROUP OF A SURFACE OF GENUS 2
SUHYOUNG CHOI
Abstract. We use geometric techniques to explicitly find the topological structure ofthe space of representations of the fundamental group of a closed surface of genus 2 toSO(3). There are two components of the space. We will describe the topology bothcomponents and also describe the corresponding spaces of representations in SU(2) anddescribe the sixteen to one branched covering for each component and the branch locusconsisting of 2-spheres and 2-tori. Along the way, we also describe the toric topologyof the space. We will later related this result to our further work into higher-genuscases and the SL(3, R)-representations. In this paper, we need the smoothness result ofHuebschmann.
It is well-known that the set of homomorphisms of a finitely presented group to a Liegroup G has a topology as a subspace of Gn, for n the number of generators, defined by anumber of polynomial equations corresponding to the relations. The space of representa-tions of the fundamental group π of a surface to a Lie group G is the algebraic set of thespace of homomorphism π in to G quotient out by the natural conjugation action. This isan interesting subject with a long history and involving many other principal fields suchas algebraic geometry, topology, geometry, and mathematical physics particularly whenthe Lie group is SU(2). (See Goldman [11] for the part of the beginning of the subject.)
The main purpose of this paper is to aid in the study of the SL(3, R)-representationspaces later. We can find the natural coordinate parameterization extending ones forSO(3)-representation spaces later. Clearly, the direction of the research is to study thetopology and geometry of G-representations for general Lie groups G.
In this paper, we will find the detailed toric cell-decomposition of the SO(3)-representationspace of the fundamental group π1(Σ) of a closed orientable genus 2-surface Σ. The cell-decomposition is in fact one adopted to the later study of SL(3,R)-representation spacefor π1(Σ), which is the purpose of this paper. We obtain the topological characterizationof the SO(3)-representation space of π1(Σ). The topology of the two components of thisspace are described.
Here, the old work of Narashimhan, Ramanan, Sechadri, Newstead and so on [19],[20],[22] show that the space of SU(2)-representations for genus two is diffeomorphic toCP3. We will show that this space 16 to 1 branch covers the component of our spacecontaining the identity representation. The other component is also branched-covered bythe space of SU(2)-representation for a punctured genus two surface with the punctureholonomy −I in an 16 to 1-manner.
Newstead [21] and others worked on determining cohomology rings of moduli spacesarising in this manner. Huebschmann, Jeffreys and Weitzmann [15] [16] worked exten-sively on the space of representations to SU(2), and showed that it is a toric manifold
1

2 SUHYOUNG CHOI
by finding the open dense set where 3-torus acts on. Huebshmann [13] also showed thatthis space branch-covers the SO(3)-representation spaces; however, we show more detailedviews here.
One can study this area using Higg’s bundle techniques as initiated by Hitchin [8],Simpson [23], Donaldson [7] and Corlette [6]. There are now extensive accomplishmentsin this area using these techniques. (See Bradlow, Garcia-Prada, and P. Gothen [2] and[3].)
We are more interested in how this space is related to the SL(3,R)-representationspace. The SO(3)-representation space will imbed inside the corresponding SL(3,R)-representation space. The two components will imbedd in the two components of thelater space respectively and the Hitchin-Teichmuller component will not contain any ofSO(3)-representations. We plan to use our work in this paper to describe the topology ofthe SL(3,R)-representation space.
Compared to the work using algebraic geometry or Yang-Mills fields, our method ismore elementary and geometrical. However, the steps and the details to check seemmore here since we are not using already established theories, and the arguments are nottotally geometrical yet. Main point of our method seems to be that we have more directway to relate the SO(3)-representation space with the SU(2)-representation space. Amajor disadvantage is that we need to make use of the smoothness result of Huebshmann[13]. However, we have worked on a geometric way to avoid this and directly prove ourtheorems. We will continue this and present the method if successfully accomplished.
Let Σ be a closed surface of genus 2 and π1(Σ) the fundamental group and let SO(3)denote the group of special orthogonal matrices with real entries. The space of homomor-phisms π1(Σ)→ SO(3) admits an action by SO(3) given by
h(·) 7→ g ◦ h(·) ◦ g−1, for g ∈ SO(3).
We can realize the set of homomorphism Hom(π1(Σ), SO(3)) as an algebraic subset ofSO(3)4 where 4 is the number of generators of π1(Σ). We denote by rep(π1(Σ), SO(3)) asthe topological quotient space of this space under the action of SO(3).
There are two components of rep(π1(Σ), SO(3)) topologically. There is the identitycomponent C0 containing the equivalence class of the identity representation, i.e., onesending every element of π1(Σ) to the identity. The representations in other componentC1 corresponds to the flat SO(3)-bundles with Stiefel-Whitney number 1.
By a rotation, we mean a transformation which can be locally conjugated to be anorientation-preserving isometry in a Euclidean space with a set of fixed point a subspaceof codimension two. A rotation angle is measured by taking angle from the fixed sub-space in counterclockwise direction once the fixed subspace is given an orientation. Aninvolutionary rotation is a rotation of order two, i.e., a rotation of angle π.
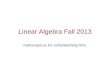
We define a tetrahedron G in the positive octant of R3 by the equation x+ y + z ≥ π,x ≤ y+z−π, y ≤ x+z−π, and z ≤ x+z−π. This has vertices (π, 0, 0), (0, π, 0),(0, 0, π),and (π, π, π) and is a regular tetrahedron with edge lengths
√2π. Recall that the Klein
four-group K is a four element group {I, i, j, k} where ij = k, jk = i, ki = j isomorphicto Z2 ⊕ Z2. There is a natural action of the Klein four-group by isometries generated byinvolutionary rotations along the respective lines through (π/2, π/2, π/2) parallel to eachof the axes which correspond to i, j, k respectively. (See Figure 1.)

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 3
A’
B
I
I
B’
C
C’
(!/2, !, !/2)
B
A
C
A
I(!/2,!/2,0)
(!/2, !/2, !)
(0,!/2,!/2)(!/2,0,!/2)
(!,!/2,!/2)
Figure 1. The tetrahedron and the Klein-four-group-symmetries. Thethree edges in front are labeled A,B, and C in front and the three oppositeedges are labeled A′, B′, and C ′.
Actually K is isomorphic to Z22, which will be called a Klein four-group as well. We
will denote the Klein four-group by K whenever possible. By a double Klein four-group,we mean a product of two Klein four-group, which is isomorphic to Z4
2.We will realize CP3 as a torus fibration over G where fibers over the interior points
are 3-dimensional tori, fibers over the interior of faces 2-dimensional tori, fibers over theinterior of edges circles, and the fiber over a vertex a point. (See Subsection 6.1 for moredetails.)
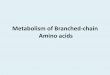
A blown-up tetrahedron G is topologically obtained by first truncating small tetrahedraG at the vertices of G with base parallel to the respective opposite side of the verticesand then truncating a thin prism along the remaining six edges so that a vertex of one ofthe six newly formed rectangles is a vertex of another rectangle. We can think of G as Gwith vertices and edges blown up radially. Since blowing up is what we actually do, wewill use the term blown-up tetrahedron. (See Figure 2.) By a region, we will mean thesubdomain in the boundary of G or G times a three-dimensional torus and their quotientimages also.
Let T n denote the n-dimensional torus, i.e., a product of n circles S1, and let Zn2 denote
the direct sum of n copies of the cyclic group Z2 of order 2. For each n, let Sn denote theunit sphere in Euclidean space Rn+1.
Theorem A . Let π1(Σ) the fundamental group of a closed surface Σ of genus 2.
(i) The identity components C0 of rep(π1(Σ), SO(3)) is homeomorphic to the quotientspace of CP3 by a double Klein four-group action with nonempty fixed points.
(ii) rep(π1(Σ), SU(2)) branch-covers a component C0 of rep(π1(Σ), SO(3)) containingthe identity representation in a 16 to 1-manner. Actually, the map is induced bya quotient map under the action of an abelian group of order 16 isomorphic to Z4
2.

4 SUHYOUNG CHOI
d
!
!!
!!!
IV
A
A’
B
B’
C
C’a
b c
Figure 2. The face diagram of blown-up tetrahedron and regions to beexplained later.
In this paper, we will be able to see C0 as CP3 by inserting into CP3 the four 3-ballscorresponding to the vertices and inserting solid tori at the circles over the edges. Thesolid tori will converge to 3-ball as they approach the fibers above the vertices. Thesubspace of abelian representations consist of 2-tori over the interior of faces and theboundary 2-tori of the solid tori over edges and the boundary sphere of the vertex 3-balls.
Remark 0.1. We can determine the branched locus exactly.
(iii) More precisely, rep(π1(Σ), SU(2)) is homeomorphic to CP3 seen as a torus fibrationover a tetrahedron. There is a Klein four-group Z2
2-action acting on torus fiberswith branch locus six 2-spheres over the six edges of the tetrahedron G. Two of thesix 2-spheres meet at a point if and only if their edges do so at a vertex. Three ofthem meet at a unique point if and only if their edges do so.
(iv) There is a Klein four-group Z22-action which do not preserve fibers but acts on G
as above. The branched locus is a union of six 2-spheres over the axes in G. Thereare two disjoint 2-spheres over each axis. Over the same axes, the 2-sphere aredisjoint, and the spheres over distinct axes meet if their axes do so.
See Remark 7.6 for more details. We also see that rep(π1(Σ), SO(3)) has an orbifoldstructure with singularities given by the above six spheres.
An octahedral manifold is a manifold obtained from the toric variety over the octahedronby removing the six singularities and gluing in B3 × S3 to make it into a manifold. Wewill say more details later.
The octahedral manifold is a torus fibration over an octahedron so that over the interiorof the octahedron the fibers are 3-dimensional tori and over the interior of faces the fibersare 2-dimensional tori and over the interior of the edges the fibers are circles and the overthe vertex the fibers are 3-spheres.
Let Σ1 denote a surface of genus two with one puncture. Let rep−I(π1(Σ)1(Σ1), SU(2))be the quotient space of the subspace of Hom(π1(Σ1), SU(2)) with the holonomy of theboundary curve −I under the usual conjugation action.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 5
Theorem B . (i) C1 is homeomorphic to a double Klein four-group quotient of anoctahedral manifold.
(ii) rep−I(π1(Σ1), SU(2)) is homeomorphic to the octahedral manifold and branch cov-ers C1 in a 16 to 1 manner by an action of Z4
2.
Remark 0.2. (iii) More precisely, rep−I(π1(Σ1, SU(2)) is homeomorphic to an octahe-dral manifold seens as a torus fibration over an octahedron except at the vertices.By a Klein four-group Z2
2-action preserving torus fibration, this branch covers CP3
with branch locus a union of three mutually disjoint 2-tori.(iv) There is a Klein four-group Z2
2-action which do not preserve fibers. The branchedlocus is the union of six 2-tori. (See Subsection 10.2.)
We briefly outline this paper: We start with rep(π1(P ), SO(3)) for a pair of pantsP . We show that there is a dense set where the representation is obtainable by gluingtwo isometric triangles. In fact, every representation is obtained by gluing two isometrictriangles which may be degenerate ones. The choices involved give us the K-action.
The surface Σ decomposes into two pairs of pants. The space rep(π1(Σ), SO(3)) isthen constructed using the gluing maps between two pairs of pants. We obtain the twocomponents in this manner and realize them as a quotient space of T 3-bundles over ablown-up tetrahedron or a blown-up octahedron under a K-action.
In Section 1, we compactify the space of spherical triangles considered equivalent byisometries by adding generalized triangles including hemispheres, segments, and points.This space can be viewed as a tetrahedron truncated at vertices and edges in a parallelmanner. Actually, it is the blown-up tetrahedron.
In Section 2, we will describe the SO(3)-representation space of the fundamental groupof a pair of pants by relating a spherical triangle with the SO(3)-representations. Theyare both a tetrahedron with the above described action by K. (This is an old idea whichalso appeared in Thurston’s book. [24])
In Section 3, we discuss the relationship of SU(2) with SO(3) and find useful way todescribe elements. We redescribe the SO(3)- and SU(2)-representation spaces of a freegroup of rank 2.
In Section 4, we describe the SO(3)-representation spaces for the fundamental groupof the surface Σ of genus 2, which has two components C0, which contain the identityrepresentation, and C1.
In major Section 5, we show how we can consider C0 as a quotient space of the T 3-bundleover the blown-up tetrahedron above, and we describe the explicit quotient relations forC0 by going over each of the faces of the blown-up tetrahedron.
In Section 6, we move to the SU(2)-representation space of the fundamental group of Σand we consider the geometric representation of such representations using the sphericaltriangles again. The representation space is again considered a quotient space of T 3-bundle over the blown-up tetrahedron. We determine the topology using the quotientrelation. Here, we make use of the smoothness result of this space.
In Section 7, we determine the topology of C0 and describe the Z42-action on the SU(2)-
representation space of the fundamental group of Σ to branch cover C0.

6 SUHYOUNG CHOI
In Section 8, we now turn our attention to C1. Here, we show that our space isthe quotient space of an octahedron blown-up at vertices times T 3. We describe theequivalence relations.
In Section 9, we show that the space of the SU(2)-representations of the fundamentalgroup of the punctured Σ where the puncture holonomy equals −I has a topology of filledoctahedral manifold.
In Section 10, we determine the topology of C1 and describe the Z42-action on the above
SU(2)-representation space of the fundamental group of punctured Σ to branch-cover C1.
1. The geometric limit configuration space
Actually, if we consider the vertices as well, the above tetrahedron is not enough forour purpose. We need to consider the sequence of spherical triangles converging to theboundary and to use geometric-limit configuration spaces for the next section when we arediscussing the surface of genus 2. We blow up the tetrahedron to study the representationsof the surface group since the transition maps come into play.
First, we will describe the geometric-limit configuration space of generalized trianglesand its metric and topology. We show that the geometric-limit configuration space canbe identified with blown-up tetrahedron, and show the natural identification by the Kleinfour-group K action to identify these. Finally, we present the standard position forgeneralized triangles.
1.1. Generalized spherical triangles and geometric-limit configuration space.A lune is the closed domain bounded by two segments connecting two antipodal pointsforming an angle < π. A hemisphere is the closed domain bounded by a great circle inS2.
We define spherical triangles as above and define pointed-lunes, pointed-hemispheres,and pointed segments and pointed-points here:
• A pointed-lune is a lune with three ordered points two of them is antipodal verticesof the lune, and the third one is either one an edge or identical with one of thevertices. If in the boundary, the three points appear in clockwise direction, thenthe pointed lune is positively oriented. If two points are identical, the pointed-luneis considered degenerate.• A pointed-hemisphere is an hemisphere with three ordered points on the boundary
great circle where a segment between any two not containing the other is of length≤ π. Again a pointed-hemisphere is positively oriented if three points appear inthe clockwise direction. Note that two of the points could be identical and nowtwo distinct points are antipodal. In this case, the pointed-hemisphere is said tobe degenerate.• A pointed-segment is a segment of length ≤ π with three ordered points, two of
which are the endpoints and one of them is on the segment. Here again, thethird point could be identical with one of the endpoint, and the pointed-segmentis degenerate. The points will be denoted by v0, v1, and v2 and the angles aredenoted by α, β, and γ respectively and the length li denote the distance betweenvi+1 and vi+2 for each i = 0, 1, 2 where additions are to be understood in mod 3.By an abuse of notation li also denote the segment itself in the boundary.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 7
• A pointed-point is a point with three identical vertices.
For most cases, we will drop the ”pointed” in using the terminology.For all these, one can define notions of edges of the generate triangles as the closure
of the appropriate component of of the complement of the pair of vertices if the pair ofvertices is distinct and the set of the pair if the pair is not distinct. Thus, we can formgeneralized edges l0, l1, and l2 as being opposite v0, v1, and v2 respectively.
We now associate angles to each of the three vertices. The angles are numbers in [0, π].An idea here is that in the generalized triangles two vertices that are identical never-
theless has well-defined infinitesimal edge between them and hence direction at least. Bychoosing the directions, we obtain angles. Thus, generalized triangles have well-definedinfinitesimal edges. (However, if we go to the associated representations, this looses mean-ing.)
On the pointed-lune with three distinct vertices, the angles at the vertices of the luneare the ones given by the segments, i.e., the angle of the lune itself, and the vertex in themiddle of a segment is given the angle π.
On the pointed-lune with two vertices equal, the vertex which are distinct from othersare given the angle of the lune, and the two vertices are given angles greater than or equalto the lune-angle which sums to π plus the angle of the lune.
On the pointed hemisphere, the vertices are given angles π. On the pointed segmentwith three distinct vertices, the angles 0, 0, π are given to the endpoints of the segmentand the vertex in the middle. On the pointed segment with two vertices equal, the vertexwhich are distinct from the others is given the angle 0 and the other two are given angleswhich sums to π.
On a pointed-point, the three vertices are given three angles summing up to π. Theseconfigurations with angles assigned are said to be degenerate triangles.
Let G denote the space of all triangles, pointed-lunes, pointed-hemispheres, pointed-segments and pointed-points on S2 with angles assigned. Let G be given a metric definedby letting D(L,M) to be maximum of the Hausdorff distance between the closed subdo-
mains of elements L and M of G and the distances between corresponding points andsegments of L and M and the absolute values of the differences between the correspondingangles respectively. Note that triangles are dense in G. Also, G is compact under themetric.
An element of G can be put using an orientation-preserving isometry to a polar position:If v0 6= v1, then by setting v0 be the north pole [0, 0, 1] and the edge l2 connecting v0 to v1
in the boundary to lie on the xz-plane intersected with S2. If v0 = v1, and not equal tov2 then we set v0 to the north pole and set the edge l1 to lie in the yz-plane intersectedwith S2. If v0 = v1 = v2, then we simply put every thing to the north pole. This agreeswith the clock-wise orientation of v0, v1, and v2 on the boundary of the triangle.
The isometry group SO(3) acts properly on G. The quotient topological space is denoted
by G. This is a metric space with metric induced from G by taking the Hausdorff distancesbetween the orbits.
Proposition 1.1. A sequence of elements of G converges to an element of G if and only ifthe sequence of angles and lengths converge to those of the limit. Hence, G is the compactclosure of G imbedded in R6 by functions (θ0, θ1, θ2, l0, l1, l2).

8 SUHYOUNG CHOI
Proof. If a sequence of hex-tuples of angles and lengths converges and the correspondingsequence of lengths denoted by l2 are bounded below by a small positive number, thenthe corresponding elements of G can be put in S2 in polar positions so that the sequenceof hex-tuples converges geometrically to an element of G. This follows by using sphericalgeometry argument. If the sequence of lengths denoted l2 is going to zero but the sequenceof lengths denoted l1 is not, then we change the polar position to ones where the segmentsdenoted by l1 are put on yz-axis and v0 on the north pole. The arguments are the same.If the sequences of lengths l1 and l2 both goes to zero, then the sequence of trianglesconverges to a pointed point, and the sequences of angles and lengths all converges.Hence, we have a convergence in G.
Conversely, if a sequence of elements of G converges to say e, then we can again put theelements to polar forms. Since G is compact, the sequence has a subsequence convergingin G. The limit is in the equivalence class of the limit e. The corresponding sequences oflengths and angles converge also clearly. �
Proposition 1.2. The geometric-limit configuration space G is homeomorphic to a blown-up tetrahedron
Proof. Let G′ be the union of the interior of G and the interior of four triangular sides.Now, G′ is homeomorphic to G with edges and vertices removed.
We coordinatize G′ using G by functions θ0, θ1, θ2, l0, l1, l2. We extend the coordinatefunctions to G in a natural way: that is, first we extend the functions to the boundaryof the four faces since we can think of the closure of the four faces as the faces of G. Oneach rectangle we have a foliation perpendicular to the edge directions. A point in a leafsegment has the same coordinate function values as the ones in the end which are definedby the faces. Four triangles corresponding to the vertices have coordinate function values(π, 0, 0), (0, π, 0), (0, 0, π), or (π, π, π).
Using the cosine rules for spherical triangles, we can write a length of an edge as afunction of three vertex angles. Thus, as we approach some of the boundary of G alongan arc, the angles goes to 0 or π and we must use L’Hopital’s rules to obtain lengths.Hence, the length is a functions of the differentials of the angles.
For the interior of the faces, as we approach the boundary, no angles are going to 0 orπ and thus there is no blowing up.
For interior of edges, as we approach the boundary, one of the angles say θ0 goes to 0or π and the other two are not. Actually, the remaining two angles θ1 and θ2 approacheach other. Thus, the opposite edge length l0 goes to 0 or π also. On an arc wherethis is happening, we can write θ0 = t and θ1 and θ2 as functions of t. The limitinglength of other two l1 and l2 depend on the derivatives of θ1 and θ2. Thus, we obtain aone-dimensional blown-up at the edges.
For the arc approaching the vertex, similar reasoning hold. �
Remark 1.3. A short straight line ray in G0 ending in one of the edges or vertex ofG0 converges to a point of the regions except the points of a, b, c, and d. Actually, thesesegments ends up in the interior of the union of I, II, III, and IV and A, A′, B, B′,C, and C ′.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 9
v(0),v(1)
a
b c
d
l(0)=l(1)=l(2)=0
v(0)+v(1)+v(2)=
v(1)=v(0)+v(2)!
l(1)=0l(0)=l(2)=
!
!
!
l(1)=l(2)=l(0)=0
v(0)=v(1)+v(2)!
!
!
l(0)=l(1)=l(2)=0
v(2)=v(0)+v(1)! !
!
l(0)
l(2)
l(1)
l(2)
l(0)
l(1)
v(0),v(2)
v(1)
v(0)
v(1),v(2)
v(2)
Figure 3. Regions a, b, c, and d
1.2. Identifying the geometric configuration space with the blown-up tetra-hedron. We describe each point of the boundary of the blown-up tetrahedron G as apointed lune, a pointed hemisphere, a pointed segment, or a point. We will go each re-gion by region. (See Figures 3, 4, and 5 as reference.) Let us denote by l(i) the coordinatefunction measuring length of li for i = 0, 1, 2, and v(j) the coordinate function measuringthe angle of vi for i = 0, 1, 2.
First, we discuss regions a, b, c, and d. (See Figure 3.) These are copies of the faces ofthe given tetrahedron. On these regions original functions v(0), v(1), v(2) have the samevalues before blowing-up.
Each point of region a, which is the outside region , corresponds to a point with threevertices which are all equal to each other. Here lengths l(0), l(1), l(2) are all zero andvertices v0, v1, and v2 are given angles v(0), v(1), and v(2) summing up to π.
Each point of region b corresponds to a lune with vertices v1 and v0 = v2. The verticesare assigned angles v(0), v(1), v(2) satisfying v(1) = v(0) + v(2)− π.
Regions c and d are described in the similar way as in Figure 3.The regions a, b, c, and d are still said to be faces.For region A, there are two coordinate functions l(0) increasing from 0 to π as indicated
by the top dotted arrow and v(0) increasing from 0 to π indicated by the down dottedarrow in the left of the square A. Each point of A corresponds to a lune with verticesv(0), v(1) and v(2) on a segment of length π between them. The value of l(0) and v(0)determine the configuration uniquely. The coordinate system is given by (v(0), l(0)).
A tie is a segment in the edge region defined by angles equated with constants. Forexample, in A, it is given by the equation v(0) = θ for θ ∈ [0, π] and l(0) can take anyvalues in [0, π]. An end tie is a tie in the end of the edge region. A mid-tie is a tie givenby setting the angle parameter exactly in the middle. For A, it is given by v(0) = π/2.
For region A′, the two coordinate functions are l(0) and v(0) represented by top dottedarrow pointing right and the left dotted arrow pointing up. They take values in [0, π] asabove. Each point on the square corresponds to a segment of length l(0) with verticesv0 = v1 and v2. v0 is given an angle v(0) and v1 given the angle v(1) where v(0)+v(1) = π

10 SUHYOUNG CHOI
(A)
l(0)
! l(0)=0l(0)=
l(2)=0
!l(2)=l(2)
l(2)=0!l(2)=
l(2)
v(2)
l(0)
v(0)
l(0)
v(0)=0
l(1)
v(1)
v(1)= !
v(1)=0
!
l(1)=0l(1)=
!v(1)+v(2)=v(0)=0
l(1)=l(2)l(0)=0
l(1)
l(2)v(2)
v(1)
v(0)
v(2)
v(0)=0
v(0)
l(1)
v(1)
v(1)=0
v(1)=
l(1)=
0
!(B)
l(1)=
!v(0)=!
!
!v(0)=
v(0)=0
v(0)+v(2)=
v(1)=0
l(1)=0
l(10)=l(2)l(2)
v(1)
v(2)
l(0)
l(2)=0
l(0)=l(1)
l(0)=l(1)=0
l(0)=l(1)=
!
l(1)
v(1)
v(0)v(2)
v(2)=0v(0)+v(1) =
!!v(0)=
l(2)
l(0)
l(0)
l(1)
v(0)
v(2)
v(1)
v(0)
v(0)
l(0)
!
!
v(0)=v(2)
v(1)=
l(0)+l(2)=
!l(1)=
!l(1)=
v(1)
!
!
!
!
!
v(1)=v(0)v(2)=
l(2)=
v(1)=v(2)
v(0)=
l(0)+l(1)=
l(2)=
v(2)
!
!
!
v(1)
v(2)
l(0)=
l(1)+l(2)=
l(2)
l(1)
l(0)=
v(0)
(A’)
(C’)
(C)
(B’)
Figure 4. Regions A,A′, B,B′, C, and C ′
and v2 is given the angle 0. Here l2 is a degenerate segment, i.e., a point. The coordinatesystem is given by (v(0), l(0)).
There is actually a one-to-one correspondence between A and A′ by taking the luneand moving v0 to v1 and taking the segment between v0 and v2. This changes the angleat v0 to be π minus the original angle and similarly for the angle at v2.
For region B, we have two functions l(1) and v(1). Each point of the rectangle corre-spond to a lune with vertices v1 and v2 with v0 on the segment between v1 and v2. Thesegments l0, l1 and l2 are given lengths l(0), l(1), and l(2) respectively.
For region B′, we have two functions v(1) and l(1). To each point of the rectangle, weassociate a segment with vertices v0 and v1 = v2 of length l(1) and we associate anglesv(1) to v1 and v(2) to v2 and 0 to v0. For regions B and B′, the coordinate systems aregiven by (v(1), l(1)).
There is a one-to-one correspondence between B and B′ given by sending v1 to v2 in thelune for B and changing the angles at v1 and v0 to π minus the original angles respectively.
The analogous descriptions hold for regions C and C ′. The coordinates are given by(v(2), l(2)). Equivalently, we can use (v(0), l(0)).
These domains from the edges of G are said to be edge regions.For region I, the functions l(0), l(1), l(2) are extended as in the Figure 5 satisfying
relations l(0) + l(1) + l(2) = 2π where 0 ≤ l(i) ≤ π for each i = 0, 1, 2. Actually, this is aplane in l(0), l(1), l(2) space intersected with the closed positive octant. We identify eachpoint (l(0), l(1), l(2)) with a closed hemisphere with vertices v(0), v(1), v(2) where l(i) is

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 11
l(1)+l(2)=
l(0)=l(1)l(2)=0
l(2)
l(0)l(1)v(1)
v(2)
v(0)
l(1)=l(0)+l(2)
l(0)+l(2)= !
l(1)=l(2)
l(0)=0
l(1)= !
l(1)=l(2)l(0)=l(2)
l(2)=l(0)+l(1)
l(0)+l(1)=!
v(0)
v(2)
v(1)
l(0)
l(1)
(IV)
(I)
(II)(III)
l(0)=l(1)+l(2)=
l(0)=l(1)l(2)=0
!
!
v(2)
!
0l(1)=l(0)=l(2)
l(0)=l(1)+l(2)
l(0)
l(1)
v(1)
v(0)
v(1)=v (2)=0v(0)=
l(2)
l(2)
l(0)+l(1) =
l(0)+l(1)+l(2)=
v(0)
l(0)
v(1)
v(2)
l(1)!
!
l(2)= !
l(0)+l(2)=!
l(1)= !!
!l(0)=
Figure 5. Regions I, II, III, and IV with configurations in the right sides
the distance between v(i + 1) and v(i + 2) for each i = 0, 1, 2. Therefore, each pointedhemisphere is coordinatized here.
For region II, l(0) = l(1) + l(2) and the bounds as above for each l(i). Each point(l(0), l(1), l(2)) is identified with a segment of length l(0) with vertices v(1), v(2) and v(0)on it. Clearly l(1) is the distance between v(0) and v(2) and l(2) one between v(0) andv(1).
For region III, l(1) = l(0)+l(2). Each point (l(0), l(1), l(2)) is identified with a segmentof length l(1) with vertices v(0), v(2) and v1 on it.
For region IV , l(2) = l(0)+l(1). Each point (l(0), l(1), l(2)) is identified with a segmentof length l(2) with vertices v0, v1 and v2 on it.
Notice for regions I, II, III, an IV , the points are coordinatized by (l(0), l(1)) for0 ≤ l(0), l(1) ≤ π. These are said to be vertex regions.
1.3. An extension of the Klein four-group action. We now extend the discussionsto the boundary and study identifications in the boundary: The map IA in Go can bedescribed as taking as v0 and v1 antipodal points. That is, we change our triangle withvertices v0, v1, and v2 to one with vertices −v0,−v1, and v2. This gives the changes inparameter as follows
(v(0), v(1), v(2), l(0), l(1), l(2))→ (π − v(0), π − v(1), v(2), π − l(0), π − l(1), l(2)).
The map IB changes the triangle with vertices v0, v1, and v2 to one with v0,−v1, and−v2:
(v(0), v(1), v(2), l(0), l(1), l(2))→ (v(0), π − v(1), π − v(2), l(0), π − l(1), π − l(2)).

12 SUHYOUNG CHOI
The map IC changes the triangle with vertices v0, v1, and v2 to one with −v0, v1, and−v2:
(v(0), v(1), v(2), l(0), l(1), l(2))→ (π − v(0), v(1), π − v(2), π − l(0), l(1), π − l(2)).
For our geometric degenerate triangles, we do the same. For regions a, b, c, and d, theactions are merely the linear extensions or equivalently extensions with respect to themetrics.
We first describe IA:
A,A′ Regions A, A′ are preserved under IA, and (l(0), v(0)) is mapped to (π− l(0), π−v(0)).
B,B′ The region B is mapped to B′ and vice versa. (l(1), v(1)) is mapped to (π −l(1), π − v(1)).
C,C ′ The region C is mapped to C ′ and vice versa. (l(2), v(2)) is mapped to (π −l(2), π − v(2)).
I, IV The region I is mapped to IV and vice versa. (l(0), l(1), l(2)) is mapped to(π − l(0), π − l(1), l(2)).
II, III The region II is mapped to III and vice versa. (l(0), l(1), l(2)) is mapped to(π − l(0), π − l(1), l(2)).
The actions of IB and IC are analogous. In fact, one can identify G by the tetrahedronthat closure of Go truncated by planes parallel to sides at vertices an edges: more precisely,at a vertex v, we take a plane parallel to the opposite side and passing through thetetrahedron of distance ε to v for a sufficiently small ε > 0. We cut off the neighborhoodof v by this plane. We do this at each vertex for the same ε. At an edge e, we take a planeparallel to e and the edge opposite e which is at the distance ε from the line containing e.We truncated every edge. This gives us an embedding of G with incorrect coordinates.
Finally note, IA is an involutive isometry of order two with the set of fixed points theaxis trough the center of A and A′. IB is one with the fixed axis though the center of Band B′ and IC one with the fixed axis though the center of C and C ′.
1.4. Standard positions for generalized triangles. For later purposes, we introducestandard position for generalized triangles. Heuristically speaking, even though the edgesmaybe degenerate, we can still read angles with respect to the infinitesimally small edgesand hence have directions at least. We use this idea:
Let H be the hemisphere containing [1, 0, 0], [0, 0, 1] in the boundary great circle S1 andcontaining [0, 1, 0] in the interior.
The vertex v0 is to be put on [1, 0, 0] and v1 on the S1 in the closure L of the componentof ∂H − {[1, 0, 0], [−1, 0, 0]} containing [0, 0, 1] and v2 is in H, and the interior of thetriangle to be in Ho. Denote by −L the antipodal segment to L, i.e., the set of antipodesto points of L. (We remark that the triangle is then put in the right orientation.)
For any nondegenerate triangle, this determines the triangle in a standard positionuniquely. For generalized triangles in the regions I, II, III, and IV , the standard positionis determined by the above conditions as well.
For generalized triangles in the regions a, b, c, and d, if v0 = v1 = v2, then we let thesebe [1, 0, 0] all. Suppose v0 = v1 and v2 is antipodal to these. Then we let v0 = v1 = [1, 0, 0]and v2 = [−1, 0, 0] and let the edge l1 be the segment of length π determined by the angle

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 13
θ0 from L at v0 and l0 be one determined by the angle π − θ1 from L at v1 and l2 is thedegenerate segment equal to {v0 = v1}.
Suppose v1 = v2 and are antipodal to v0. Then we let v0 = [1, 0, 0] and v1 = v2 =[−1, 0, 0]. We let l2 = L and l1 be the segment of length π determined by the angle θ0
from L at v0 and let l0 be the degenerate segment equal to {v1 = v2}.Finally, if v0 = v2 and are antipodal to v1. Then we let v0 = v2 = [1, 0, 0] and
v1 = [−1, 0, 0] and let l1 be the degenerate segment {v0 = v2} and l2 is the segment oflength π determined by angle θ0 with L at v0 and l0 = L.
Now we consider the interiors of regions A,A′,B,B′,C,C ′: v0 = [1, 0, 0] always here.
(A) We have v1 = [−1, 0, 0] and l2 = L, and l0∪l1 is the segment of length π determinedby θ0 with L at v0.
(A′) We have v1 = [1, 0, 0] and l2 = {v0 = v1}, and l1 = l0 is the segment of length ≤ πdetermined by angle θ0 from L as above.
(B) We have v1 ∈ L, v2 = −v1 ∈ −L, and l2 ⊂ L, and l01 is in the complement of L. l0is determined by θ1 at v1.
(B’) We have v1 = v2 and l1 = l2 are in L and l0 = {v1 = v2}. l0 can be considered aninfinitesimal segment at v1 having angle θ1 with the segment from v1 to v0 in L.
(C) v1 is on L and v2 = [−1, 0, 0] and l0 and l2 are in L, and l1 is the segment connecting[1, 0, 0] to [−1, 0, 0] of angle θ0 with L at v0.
(C’) v2 = v0 and l0 = l2 are in L. l1 can be considered an infinitesimal segment havingangle θ0 with L at v0.
2. The representation space of the fundamental group of a pair of pants
The representation space will be analyzed geometrically using spherical triangles in thissection and will be shown to be the quotient of a tetrahedron with some Klein four-groupK axial actions. (In the next Section 3, we generalize these results to SU(2).)
2.1. Matrix-multiplication by geometry. We will coordinatize S1 by [0, 2π] with 0and 2π identified. In fact, we will think of a number in [0, 2π] as a number mod 2π unlesswe mention otherwise. For a real number will denote a point in S1 mod 2π in this paper.
An isometry ι in SO(3) fixes at least one point v in S2. Its antipodal point −v is alsofixed and with respect to a coordinate system with v as one of the frame vector, a matrixof ι equals 1 0 0
0 cos(θ) − sin(θ)0 sin(θ) cos(θ)
, 0 ≤ θ ≤ 2π.
Here, θ is the counter-clockwise rotation angle of ι and is determined by the choice ofthe fixed point v and will be 2π − θ if we chose the other fixed point. Notice that therotation angle is measured in the counter-clockwise direction with respect to the chosenfixed point.
An element of SO(3) can be written as Rx,θ where x is a fixed point and θ is the angleof rotation in the counterclockwise direction where 0 ≤ θ ≤ 2π mod 2π. For the identityelement, x is not determined but θ = 0. For any nonidentity element, x is determined upto antipodes: Rx,θ = R−x,2π−θ.

14 SUHYOUNG CHOI
2
C
A
B
1
2
e
e
e
1
1
1
2
w
w
w
!
!
!
0
00
2
2
Figure 6. Triangular representations
We begin with“multiplication by geometry”: Let w0, w1, and w2 be vertices of a spher-ical triangle oriented in the clockwise direction. Let e0, e1, and e2 denote the oppositeedges. Let θ0, θ1, and θ2 be the respective angles. Then
Rw2,2θ2 ◦Rw1,2θ1 ◦Rw0,2θ0 = I :
Draw three adjacent isometric triangles obtained by reflecting on each edge. Call themT0, T1, and T2 if they are obtained from reflecting on edges e0, e1, and e2 respectively.Since their edge lengths are the same, they are congruent. Moreover, by considering thecongruent edges and the angles between them, we obtain that Rw0,2θ0 fixes w0 and sendsT1 to T2, Rw1,2θ1 fixes w1 and sends T2 to T0, and Rw2,2θ2 fixes w2 and sends T0 to T1. Thecomposition the three isometries send each vertex to itself and hence is the identity map.
Using this equation, we can compute
Rw2,2θ2 ◦Rw1,2θ1 ◦Rw0,2θ0 = I,
for example. Finally, denoting the rotation at w0, w1, w2 by A,B, C respectively, we obtain
(1) CBA = I, C−1 = BA, C = A−1B−1.
We will generalize this idea when the triangles are degenerate. (See Subsection 2.2.)Of course, careful considerations of orientations are important: the triangle is ordered
clockwise and the rotation directions are counter-clockwise.
2.2. Mutiplication geometry extended. We now extend the idea of “multiplicationby geometry” to degenerate cases (which is applicable in SU(2) as well): Let w0, w1,and w2 be vertices of a spherical degenerate triangle oriented in the clockwise direction.Let e0, e1, and e2 denote the opposite edges. Even in the degenerate case, since we canput the generalized triangle in the standard position, we have a well-defined great circlescontaining each of the edges for any generalized triangle.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 15
Let θ0, θ1, and θ2 be the respective angles in [0, π]. Then
Rw2,2θ2 ◦Rw1,2θ1 ◦Rw0,2θ0 = I
will hold. This is checked by using the same argument as above.Using this equation, we can compute
Rw2,2π−2θ2 = Rw1,2θ1 ◦Rw0,2θ0 ,
for example. Finally, denoting the rotation at w0, w1, w2 by A,B, C respectively, we obtain
(2) CBA = I, C−1 = BA, C = A−1B−1.
We should remark that when θ2 = 0, π, then Rx,2θ is the identity map. However, theequation still holds.
When the angle at w2 is 0 or π so that C equals I (respectively I or −I in SU(2)), thevertex w2 can be chosen arbitrarily on the boundary of the triangle.
We note that under quotient relation, C is a smooth function of A and B.As an illustration, we give some examples here. The readers can fill in all remaining
cases using permutations. The triangle is counter-clockwise oriented in the boundary bythe order of w0, w1, and w2 appearing.
• The triangle is a point with w0 = w1 = w2. Then θ2 = π − θ0 − θ1 and C is arotation at w2 of the angle 2θ2.• The triangle is a segment with w0 = w1 and w2 with nonzero angles θ0, θ1 andθ2 = 0. Then θ1 = π − θ0 naturally. Thus B = A−1 and C = I. Actually, we canchoose w2 to be any point in S2.• The triangle which is a lune with w0 as a vertex and w1 in the interior of an edge.
Then the lune angle θ equals θ0 and C has a fixed point w2 = −w0 and the angleof rotation is 2θ0.• The triangle which is a lune with w0 and w1 as the vertex of the lune with lune
angle θ. Then the lune angle θ equals smaller of θ0 or θ1 which can be seen fromthe classification of generalized triangles.
– If θ0 = θ and θ1 = θ, then w2 can be any point on the segment of a lune andθ2 = π and C is I.
– If θ0 = θ and θ1 > θ, then w2 = w1 and θ2 = θ0 + π − θ1.– If θ1 = θ and θ0 > θ, then w2 = w0 and θ2 = θ1 + π − θ0.– If θ0 = θ1 = π, then the triangle is a hemisphere w2 can be any point on a
segment with endpoints −w0,−w1 and θ2 = π. In this case, A,B, and C areall identity.
(In SU(2) case, we only need some obvious sign changes.)
Proposition 2.1. Associated with each generalized triangle, one can form a representa-tion of π1(P ) which agrees with the above identification for triangular representations.
Proof. Since the degenerate triangles have edge directions at least, there are unique greatcircle containing each edge in the generalized sense. We can reflect along the great circlesand the argument is the same. �

16 SUHYOUNG CHOI
BAB
A BA
!1
!1
!1
A
B
C
f
f
f
f
f
f
B
A
CACA
Figure 7. Triangular representations
2.3. The representation space. Let P be a pair of pants and let P be the universalcover. Let c0, c1, and c2 denote three boundary components of P oriented using theboundary orientation. Let π1(P ) denote the fundamental group of P seen as a group ofdeck transformations generated by three elements A,B, and C parallel to the boundarycomponents of P satisfying CBA = I. A acts on a lift c0 of c0 in P and B on c1 a lift ofc1 and C on c2 a lift of c2.
Let S2 be the unit sphere in R3. S2 has a Riemannian metric of constant curvatureinvariant under the standard action of SO(3). Take a triangle on the sphere S2 withgeodesic edges so that each edge has length < π so that the vertices are ordered in aclockwise manner in the boundary of the triangle. Such a triangle is classified by theirangles θ0, θ1, θ2 satisfying
θ0 + θ1 + θ2 > π(3)
θi < θi+1 + θi+2 − π, i = 0, 1, 2.(4)
where the indices are considered to be in Z3. The region gives us an open tetrahedron inthe positive octant of R3 with vertices
(π, 0, 0), (0, π, 0), (0, 0, π), (π, π, π)
and thus we have 0 < θi < π. This is a regular tetrahedron with edge lengths all equal to√2π. Let us denote the closure by G.Let 41 be such a triangle with vertices removed and 42 an identical triangle. We can
glue 41 and 42 along corresponding open edges and obtain an open pair of pants P ′ withan elliptic metric. We can attach boundary component circles to P ′ with labeling A,B,and C corresponding to the vertices. This gives us a geometric structure on P ′ modeled on(S2, SO(3)). Hence, there is an associated representation h : π1(P
′)→ SO(3) determinedup to conjugation. Such a representation is said to be a triangular representation. Thisapproach was used in Thurston’s book. (See [24]).

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 17
Lemma 2.2. rep(π1(P ), SO(3)) contains a dense open set where each representation isa triangular. In fact, one can always find a path from any representation to triangularrepresentations where each point except the beginning point of the path is triangular.
Proof. Let h be a representation π1(P )→ SO(3). Then h(A), h(B), and h(C) are elementsof SO(3) and hence contains a fixed point in S2 Let fA and −fA denote the fixed pointsof h(A) and fB and −fB those of h(B) and fC and −fC those of h(C). The fixed points arechosen arbitrarily if there are more than one fixed points up to antipodal transformations,i.e., only when the matrix is the identity matrix.
We can choose one among each antipodal pair and obtain a triangle which might bedegenerate. (The choice of what degenerate triangle can be arbitrary. See Section 1for example of degenerate triangles.) Let 4(fA, fB, fC) denote such a triangle, and thevertices are oriented in a clockwise direction (See Figure 7).
• h(A) fixes fA and send fC to h(A)(fC) = fACA−1 and h(A)−1(fB) = fA−1BA to fB.Hence h(A) send 4(fA, fC, fA−1BA) to 4(fA, fACA−1 , fB).• h(B) fixes fB and send fA to h(B)(fA) = fBAB−1 . and send fACA−1 to h(B)(fACA−1) =fBACA−1B−1 = fC as BA = C−1 and C = A−1B−1, and hence sends4(fB, fA, fACA−1)to 4(fB, fBAB−1 , fC).• h(C) fixes fC and sends fB to h(C)(fB) = fCBC−1 = fA−1BA as CB = A−1 andC−1 = BA and sends fBAB−1 to fCBAB−1C−1 = fA, and hence sends4(fC, fB, fC−1BC)to 4(fC, fA−1BA, fA).
Thus we obtain the diagram in Figure 7.Since h(A), h(B), and h(C) are isometries, we see that the three adjacent triangles
are congruent spherical triangles. By the length consideration, they are congruent to4(fAfBfC).
Thus, if one of the triangle is degenerate, then all other are degenerate also and theangle of rotation associated with h(A), h(B), and h(C) can be either 0, 2π depending onwhether the corresponding angle of the triangle is 0 or π.
Also, if the triangles are not degenerate, then the representation is triangular by defini-tion. A nearby representation has nondegenerate triangles, and hence, they are triangular.Thus the set of triangular representations are open.
If the triangles are degenerate, then we can continuously change the lengths of thetriangles to make them nondegenerate and this creates a representation near h as possible.Hence, the triangular representations are dense. �
Proposition 2.3. rep(π1(P ), SO(3)) is homeomorphic to the quotient of the tetrahedronG by a K-action and the identification indicated in Figure 1.
Proof. The set of triangular representations up to conjugacy are classified by the opentetrahedron of angle parameters determined by equation 4. The ambiguity is given bythe choice of fixed points. In the interior, this is all the ambiguity. We can choose threenoncollinear fixed points of h(A), h(B), and h(C) respectively as long as the vertices inthe boundary appear in the clockwise-direction. Thus, we obtain that K is generated by

18 SUHYOUNG CHOI
the maps
IA : (v, w, z) 7→ (v,−w,−z),(5)
IB : (v, w, z) 7→ (−v, w,−z),(6)
IC : (v, w, z) 7→ (−v,−w, z).(7)
Respectively, these maps make the angles change by
IA : (θ1, θ2, θ3) 7→ (θ1, π − θ2, π − θ3)(8)
IB : (θ1, θ2, θ3) 7→ (π − θ1, θ2, π − θ3)(9)
IC : (θ1, θ2, θ3) 7→ (π − θ1, π − θ2, θ3).(10)
In the boundary of the tetrahedron, all fixed points with angles not equal to π, are eitheridentical or antipodal. Since the angle π, corresponds to the identity transformation, wecan regard any two such transformations with same angles up to K-action to be the same.As they are abelian representations, we see that there are no more identification otherthan ones obtained from the K-action.
�
3. SO(3) and SU(2): geometric relationships
Here, we discuss some geometric relationship between SO(3) and SU(2) (for which Iam indebted to Sergio Fenley about 20 years ago). Using this, we will show that theSU(2)-representation space of the fundamental group of a pair of pants is a tetrahedronbranch-covering the SO(3)-representation space of the same group.
3.1. The covering group. We can characterize an element of SO(3) by noting its an-tipodal pair of fixed points and the rotation angles at the points related by θ to 2π − θ.
Thus, SO(3) can be identified with RP 3 in the following way: Take B3 of radius π inR3 and parameterize each segment from the origin to the boundary by the distance to theorigin. Then for each g ∈ SO(3) we choose the fixed point with angle θ < π and take thepoint in the ray to the point in B3 of distance θ from the origin. If θ = π, then we takeboth points in the boundary S1 of B3 in the direction and identified them.
Taking the quotient space, we obtain RP 3. This correspondence gives a diffeomorphismSO(3)→ RP 3.
The space of quaternions can be describes as the space of matrices(x y−y x
), x, y ∈ C.
The two-sphere S2 sits as unit sphere in the purely quaternionic subspace in the spaceof quaternions, i.e., (
ib c+ id−c+ id −ib
), b, c, d ∈ R, b2 + c2 + d2 = 1.
Elements of SU(2) can be represented as elements of the unit 3-sphere in the space ofquaternions and the action is given by left-multiplications. SU(2) acts on S2 by conjuga-tions. This gives a homomorphism from SU(2) to SO(3) with kernels {I,−I} where I is

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 19
a 2× 2 identity matrix, and this provides us with a double cover SU(2) ∼= S3 → SO(3) ∼=RP 3.
Since SU(2) double-covers SO(3), the Lie group SU(2) is diffeomorphic to S3. We realizethe diffeomorphism in the following way: we take the ball B3
2 of radius 2π so that theboundary is identified with a point. Hence, we obtain S3 . Let ||v|| denote the norm of avector v in B3
2 . Take the map from B32 → B3 given by sending a vector v to v if ||v|| ≤ π
or to (π − ||v||)v if ||v|| > π. This is a double-covering map clearly.By lifting, we obtain an identification of SU(2) to B3
2/ ∼ by collapsing the sphere atradius 2π to a point to be regarded as −I. Thus, every element of SU(2) unless I or −Ican be identified by a choice of a fixed point in S2 and the angle of rotation between 0and 2π. Hence, it is to be regarded as an element of SO(3) with a choice of a fixed pointand the angle of rotation as seen from that point. Furthermore, I can be considered arotation with any chosen fixed point and 0 rotation angle and −I a rotation with anyfixed point and a 2π rotation angle.
Finally, an element of SU(2) can be considered as a fixed point of S2 with angles in[−2π, 2π] where −2π and 2π are identified or with angles in [0, 4π] where 0 and 4π areidentified. Thus each one parameter family of commutative group SU(2) double-covers aone-parameter family of a commutative group in SO(3). Hence, we have a circle S1
2 oftwice the circumference in SU(2).
We denote by Rx,θ for x ∈ S2 and θ ∈ [−2π, 2π] mod 4π or θ ∈ [0, 4π] mod 4π, theelement of B3
2/ ∼ represented as above. This element lifts Rx,θ′ for θ′ = θ mod 2π.Given an element of SU(2) with a fixed vector and a rotation angle (nonzero or 2π) themultiplication has the effect of taking the antipodal vector as the fixed vector
(11) −IRw,θ = Rw,2π ◦Rw,θ = Rw,2π+θ = R−w,4π−2π−θ = R−w,2π−θ.
Also, we have Rx,θ = R−x,4π−θ. Note that this also holds when θ = 0, π.(Clearly, the meaning of Rx,θ changes depending on the context whether we are in
SO(3) or in SU(2).)By choosing θ to be in [0, 2π], Rx,θ is now a point in B3
2/ ∼∼= S3. Thus, each point ofS3 − {I,−I}, we obtain a unique rotation Rx,θ for θ ∈ (0, 2π) and conversely. Hence, wehave a unique representation of each element of SU(2) as a rotation with angles in [0, 2π].
The “multiplication by geometry” also works in SU(2): Let w0, w1, and w2 be verticesof a spherical triangle, possibly degenerate, oriented in the clockwise direction. Let e0, e1,and e2 denote the opposite edges. Let θ0, θ1, and θ2 be the respective angles for 0 ≤ θ ≤ 2π.Then
Rw2,θ2 ◦Rw1,θ1 ◦Rw0,θ0 = −I.
Here the minus sign is needed by continuity since we can let w0 = w1 = w2 and this holds(That is, in this case, θi are angles of a Euclidean triangle. The sum of two times theangles of a Euclidean triangle is 2π.)
We can extend angles further. By an immersed spherical triangle is a disk boundedby three arcs meeting at three-points mapping with injective differential to S2 so thatthe arcs map as geodesics. Here angles at the vertex is measured by breaking them intosmaller angles so that the angles inject and summing up the values. Actually, we restrictit so that the angles are always ≤ 2π.

20 SUHYOUNG CHOI
Thus, for general θi arising from an immersed spherical triangle, we see that
Rw2,2θ2 ◦Rw1,2θ1 ◦Rw0,2θ0 = −I.
if θi are angles of a spherical triangle oriented counter-clockwise and w0, w1, and w2 areordered in the counter-clockwise orientation from the disk. (Of course, the above equationholds with I replacing −I in SO(3)-cases.)
Actually, if none of the angles equal to 2π or 0, then the disks are a hemisphere with aconvex triangle with an edge in the boundary of the hemisphere removed or the exterior ofa convex triangle. In the first case two angles are < π and one > π and in the second caseall three angles are > π. If one of the angles is zero or 2π, then we obtain a completionof some open domain in S2 or a segment.
To summarize, denoting the rotation at w0, w1, and w2 by A,B, and C respectively,where w0, w1, w2 are in clockwise orientation as seen from inside of the triangle. weobtain
(12) CBA = −I, C−1 = −BA, C = −A−1B−1.
Thus, C is obtained from multiplying −I to the geometrically constructed one. That is Ccan be considered as the element of SU(2) with fixed point the antipode of the vertex ofthe triangle and the angle 2π minus the constructed angle. (See Subsection 2.2.)
Of course, if one is considering only representations, we can always find an imbeddedspherical triangle with all edge length ≤ π giving us same elements of SU(2).
We can see from Proposition 2.3 rep(π1(P ), SU(2)) can be identified with the tetra-hedron: Clearly, rep(π1(P ), SU(2)) maps onto rep(π1(P ), SO(3)). In the interior of thesecond space, each element corresponds to the triangle with angles between 0 and π.This gives a unique element of the rep(π1(P ), SU(2)). The tetrahedron parametrizingrep(π1(P ), SO(3)) now lifts to rep(π1(P ), SU(2)) by lifting triangles. (We need a bit ofcare when some of A,B, and C correspond to I or −I.) Since this correspondence isone-to-one map from a compact space to a Hausdorff space, we obtain the following:
Proposition 3.1. rep(π1(P ), SU(2)) is homeomorphic to the tetrahedron, and map torep(π1(P ), SO(3)) as a four to one branched covering map induced by the Klein four-group K-action.
We note here that given boundary components c0, c1, and c2 of P , by letting c0 and c1 beregarded as generators of π1(P ), we see that h(c2) is obtained from triangle constructions,i.e., h(c2)
−1 = −h(c1)h(c0). Thus, if we use, the angles of the fixed point of h(ci) in SU(2),then we must use 2π minus two times the angle of third vertex of the triangle since weneed to take the antipodes.
Hence, by true angle parameterization rep(π1(P ), SU(2)) is parametrized by the tetra-hedron G′ given by sending (θ0, θ1, θ2)→ (2θ0, 2θ1, 2π−2θ2). The tetrahedron G′ lies in inthe positive octant of R3 and is given by by the equation x+ y ≤ z, x+ z ≤ y, y+ z ≤ x,and x+ y + z ≥ 4π. (See also [15] and [16].)
Remark 3.2. However, we will use our tetrahedron G to parameterize rep(π1(P ), SU(2))because one can read off the representation to SO(3) directly with the understanding thath(c2) is the antipodal one to what is obtained from the triangle constructions.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 21
It will be an important point in this paper that we will be “pretending” that our SU(2)-representation correspond to a spherical triangle. This will not cause any trouble in fact.
3.2. The SO(3)- and SU(2)-representation spaces of the free group of rank two.Let F2 denote a free group of two generators. We will define H(F2) as the space ofhomomorphisms F2 → SO(3) quotient by the conjugation action by SO(3). That is,
H(F2) = Hom(F2, SO(3))/SO(3).
Of course F2 is isomorphic to π1(P ) for a pair of pants P so the above subsectionscovered what we intend to redo. (See Propositions 2.3 and 3.1). However, we do this inorder to gain a different insight.
Let g0 and g1 be the two generators of F2. Consider a representation h : F2 → SO(3).The h(gi) has a pair of fixed points fi and −fi antipodal to each other for each i = 0, 1.Then f0, −f0, f1, and −f1 lie on a great circle which is unique if {f0,−f0} are distinctfrom {f1,−f1}. Since up to SO(3) action, this configuration is determined by the distancebetween the pair, we chose a maximal arc in the complement of {f0,−f0, f1,−f1}. Thenthis pair is described by the length l of the arc and the counter-clockwise respective angleθ0 and θ1 of rotations of g0 and g1 at the corresponding endpoints of l. Thus 0 ≤ l ≤ πand 0 ≤ θi ≤ 2π for i = 0, 1. Since the choice of arc is not unique, there are maps
T0 : (l, θ0, θ1) 7→ (π − l, 2π − θ0, θ1)
T1 : (l, θ0, θ1) 7→ (π − l, θ0, 2π − θ1)
T0T1 = T1T0 : (l, θ0, θ1) 7→ (l, 2π − θ0, 2π − θ1)(13)
(This is again called a Klein four-group action and is identical with the Klein four-groupaction for the representation spaces of a pair of pants. We will need this later in Subsection5.9 and Subsection 8.3.) Also, if θi = 0, then l is not determined. Therefore, there isanother equivalence relation
(14) (l, 0, θ1) ∼ (l′, 0, θ1), (l, θ0, 0) ∼ (l′, θ0, 0), 0 ≤ l, l′ ≤ π,
for any θ0 and θ1. It is straightforward to see that these are all possible equivalence classesunder the conjugation actions of SO(3).
Proposition 3.3. H(F2) is homeomorphic to a 3-ball. The union of the boundaries areprecisely the set of abelian representations of F2.
Proof. Let I = [0, π]. We consider the space I × S1 × S1 parameterizing the aboveconfigurations of arc and isometries with fixed points at the end. There is a surjective(continuous) map Q : I × S1 × S1 → H(F2) defined by sending the configuration to theequivalence class of representations sending g0 and g1 to the isometries with the fixedpoints at the end of the arc.
We see that the quotient space B = I × S1 × S1/ ∼ is mapped to H(F2) in a one-to-one and onto manner. There is an inverse map defined on H(F2) by sending eachrepresentation to (l, θ0, θ1) by doing the procedure before this proposition. Hence B ishomeomorphic to H(F2).
We now show that the quotient space B is homeomorphic to B3 and has the rightorbifold structure.

22 SUHYOUNG CHOI
All points of B have equivalent points on [0, π/2] × S1 × S1. We take a domain D =[0, π/2] × [0, π] × [0, π]. Then by the equivalence relation generated by T0T1 = T1T0 on[0, π/2]×S1×S1, the quotient image D′ of D is homeomorphic to [0, π/2]×S2 where thesphere S2 has the orbifold-structure with four singular cone-points of order two. Thus D′
has four arcs of singularities.The equivalence relation generated by T0 is the same as that of T1. Only the point in{π/2}×S2 are involved here. A circle S1 in {π/2}×S2 contains the four singular points.The equivalence can be described by an isometric reflection S1 with some metric on S1
of constant curvature 1. This last identification gives us a ball B3.The final identification collapse two disks in B3 meeting each other at a connected
boundary arc. The disks are foliated by arcs in I-directions, and hence can be consideredstrips where the transverse arcs in S2-direction connect two singular arcs in S2. The twodisks are called I-collapsed quadrilateral. The I-collapsing gives us the final result.
Abelian representations correspond to the configurations where one of the angle is zero,i.e, the I-collapsed part, or where the segment is of length 0 or π. We see that thesepoints correspond to the boundary of the ball when collapsed as above. �
The last collapse is said to be the identity collapse.Now we go over to SU(2) case. Define
HSU(2)(F2) := Hom(F2, SU(2))/SU(2).
Then since F2 is isomorphic to π1(P ), the space is homeomorphic to a tetrahedron.To understand in term of the above picture, we look at two points in S2 with angles
in the range [0, 2π]. This determines unique point and the distance between them if theangles are not 0 or 2π. Parameterizing by the distance and angle, we obtain [0, π] ×[0, 2π] × [0, 2π] by picking only the fixed points with angle in [0, 2π]. The equivalencerelation is given by (l, 0, θ2) ∼ (l′, 0, θ2) for any l, l′ and (l, 2π, θ2) ∼ (l′, 2π, θ2) for any l, l′
and (l, θ1, 0) ∼ (l′, θ1, 0) for any pair l, l′ and (l, θ1, 2π) ∼ (l′, θ1, 2π) for any pair l, l′.These lifts the identity contractions above and there are no other nontrivial equivalence
relations. This contracts sides of the cube in the l direction. Thus, we obtain a 3-ball.From the above, picture, we see that there is a four-to-one branch covering map to
H(F2) as generated by T0 and T1.
4. The representation space of a closed surface of genus 2.
We will now discuss the representation space of the fundamental group of a closedorientable surface Σ of genus 2.
First, we discuss the two-components of the representation space. Next, we discuss howto view the representation as two related representations of the fundamental group of apair of pants glued by three pasting maps.
4.1. Two components. We take three simple closed curves c0, c1, and c2 on Σ so thatthe closures of the two components of the complement of their union are two pairs ofpants S0 and S1 so that S0 ∩ S1 = c0 ∪ c1 ∪ c2. We assume that there is an order twodiffeomorphism φ acting on c0, c1, and c2 respectively and sending S0 to S1 and vice versa.We assume that ci are oriented with boundary orientation from S0.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 23
0
2c
!
c1!c
!2
0
1
Figure 8. Σ and closed curves.
There are two components of rep(π1(Σ), SO(3)) as shown by Goldman [9]. To sum-marize, each representation corresponds to a flat R2-bundle over Σ. The Stiefel-Whitneyclass in H2(Σ, π1(SO(3))) = Z2 of the flat bundle classifies the component. A componentC0 contains the identity representation, i.e., a representation which send every element tothe identity. Let c1, d1, c2, and d2 are the simple closed curves which represents a fixed setof the standard generators of π1(Σ) so that c1, c2 are obtained from the boundary com-ponents of S1 by conjugating by simply disjoint paths in S1. (There is a slight notationalabuse here.) The other component to be denoted by C1 contains the representation h∗
which sends generators corresponding to c1 and d1 a simple closed curve meeting c1 oncetransversely and disjoint from c2, d2 to the following matrices respectively
(15) A1 :=
1 0 00 −1 00 0 −1
and B1 :=
−1 0 00 1 00 0 −1
And h∗ sends c2 and a simple closed curve d2 meeting c2 once transversely and disjointfrom c1, d1 to the identity matrices respectively
Let this representation be named the other-component basis representation.
Remark 4.1. The representation belongs to C1: The three-dimensional sphere S3 sits asthe unit sphere in the purely quaternionic subspace in the space of quaternions, i.e.,(
ib c+ id−c+ id −ib
), b2 + c2 + d2 = 1.
Elements of SU(2) can be represented as elements of the unit sphere in the subspace ofquaternions and the action is given by left-multiplications. SU(2) acts on S2 by conjuga-tions. This gives a homomorphism from SU(2) to SO(3) with kernels {I,−I} where I isa 2× 2 identity matrix. The above matrices A1 and B1 respectively correspond to(
i 00 −i
)and
(0 −11 0
)whose commutator equals −I. This does not give a representation π1(Σ) → SU(2) butwill induce a representation π1(Σ)→ SO(3) whose Stiefel-Whitney class is not trivial.

24 SUHYOUNG CHOI
4.2. Representations considered with pasting maps. Let us choose a base pointx∗ of Σ in the interior of S0. Given a representation h : π1(Σ) → SO(3), we obtaina representations h0 : π1(S0) → SO(3) and h1 : π1(S1) → SO(3). The second one isdetermined only up to conjugation. A representation h defined on π1(Σ) is triangular ifthe restrictions to π1(S0) and π1(S1) are triangular. Let us restrict ourselves to triangularrepresentation in rep(π1(Σ), SO(3)) for now.
Let c00, c01, and c02 denote the oriented simple closed curves on S0 with base point x∗0 that
are freely homotopic to c0, c1, and c2 respectively, and bounding annuli with the curvesrespectively. Let us choose a base point x∗1 in S1 and oriented simple closed curves c10, c
11,
and c12 homotopic to c0, c1, and c2. Let αi denote a simple arc from x∗0 to x∗1 whose interioris disjoint from cj for j 6= i and meets ci exactly once. We can choose so that α0∗c10∗α0,−1
is homotopic to c00.Let d1 denote the closed loop based at x∗0 meeting c0 and c1 only once transversally
and disjoint from c2 oriented from c0 to c1 direction. Let d2 denote the closed loop basedat x∗0 meeting c0 and c2 only once transversally and disjoint from c1 oriented from c2 toc0 direction. Note that α1 ∗ α0,−1 is homotopic to d1 and α2 ∗ α0,−1 is homotopic to d2.Then we may assume that c01, c
02, d1, and d2 generate the fundamental group π1(Σ) and
they satisfy the relation[c01, d1][c
02, d2] = 1.
(We identify π1(S1) with α−10 ∗ i∗(π1(S1)) ∗ α0.)
Thus, if h0 : π(S0)→ SO(3) and h1 : π1(S1)→ SO(3) are induced from a representationh : π1(Σ)→ SO(3), then h0(c
0i ) are conjugate to h1(c
1i ) by an element Pi of SO(3), i.e.,
Pih0(c0i )P
−1i = h1(c
1i ) for i = 0, 1, 2.
We call fi the pasting map for ci for i = 0, 1, 2.If h0 and h1 are obtained from restricting h, then P0 = I. If we change h1(·) to be
k ◦ h1(·) ◦ k−1, then the new pasting maps become
(16) p′0 = k ◦ P0, p′1 = k ◦ P1 and p′2 = k ◦ P2.
so that
(17) p′ih0(c0i )p′−1i = h1(c
1i ) for i = 0, 1, 2.
Proposition 4.2. We have
h(d1) = P−10 ◦ P1, h(d2) = P−1
0 ◦ P2.
Proof. When k = I, the equation holds. By equation 16, it follows. �
Actually, we can consider P0, P1, and P2 as holonomy transformations of the pastingmaps associated with c0, c1, and c2 respectively. Then the above relation seem heuristicallycorrect.
The space rep(π1(P ), SO(3)) is classified as a quotient space of a tetrahedron. Thus, apoint is determined by angles θ0, θ1, and θ2 in [0, π] as half of the rotation angles measuredat some fixed points in the counter-clockwise directions. The equation 17 shows that ifh0 is represented by triple (θ0, θ1, θ2), the h1 is represented by (θ′0, θ
′1, θ′2) so that θ′i = θi
or θ′i = π − θi for i = 0, 1, 2.We showed:

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 25
Proposition 4.3. We can assume that the angles (θ0, θ1, θ2) of h0 and (θ′0, θ′1, θ′2) by the
equation
θ′i = θi or(18)
θ′i = π − θi for i = 0, 1, 2.(19)
5. Establishing equivalence relations on G× T 3 to make it equal to C0.
In this major section, we will study the identity component C0 by finding the equivalencerelations on G × T 3 giving us the same representations up to conjugacy, i.e., to find apoint of C0.
This will be done by considering the interior and each of the regions of G:
a, b, c, d, A,A′, B,B′, C, C ′, I, II, III, IV
individually and considering the action of the Klein four-group {I, IA, IB, IC} extendedto G× T 3.
We begin by discussing pasting angles. Next, we define a map T from G × T 3 to C0
corresponding the finding holonomy for the pasting angles. Then we discuss the quotientrelation for the interior. Next, we move to the boundary regions denoted by a, b, c, andd, I, II, III, and IV and finally regions B, B′,A,A′,C and C ′. Mainly, we will inducethe quotient relations to make the map T injective one. The final result of the sectionis Theorem 5.22 establishing the homeomorphism of the appropriate quotient space ofG× T 3 to C0.
In this section, we will not determine the topology of the quotient spaces but will onlyexplain the equivalence relations due to length of argument. The geometric nature ofequivalence relations instead of algebraic equivalences are emphasized here to gain moregeometric point of view of the subject instead of algebraic one. (The equivalence relationis the equivalence relation to obtain the identical SO(3)-representations. However, wechose not to simply state this algebraically to preserve the geometric flavor of this paper.)
5.1. The density of triangular representations in C0.
Lemma 5.1. For i = 0, 1, 2, define a function fi : rep(π1(Σ), SO(3)) → R by fi : [h] 7→trh(ci). Then the triangular subset D0 of C0 is not empty and fi is not constant.
Proof. The triangular part of C0 can be constructed by taking two identical sphericaltriangles with identity to construct representations corresponding to π1(S0) and π1(S1).Here clearly, ci has nonconstant rotation angles in D0. Thus fi is not constant. �
Proposition 5.2. The subset D0 of C0 of triangular representation is dense and openand moreover, any representation can be deformed to a triangular one by an analytic pathconsisting of triangular representation except at the end.
Proof. The subset where the representation restricts to h(ci) is identity is given by ananalytic subset of C0. Define a real analytic map fi : [h] 7→ trh(ci) for each i = 0, 1, 2which is well-defined. Since this function is not constant on each component of C0, by thestandard result in real algebraic geometry, the set of points where fi = 3 is an analyticsubset whose complement is dense and open. �

26 SUHYOUNG CHOI
5.2. Pasting angles.
Proposition 5.3. If h is in the identity component C0 of rep(π1(Σ), SO(3)), then
(a) We can conjugate h1 so that h0 = h1 and corresponding angles are equal.(b) For each element h of C0, we can associate a pair of identical degenerate or non-
degenerate triangles and an element of S1 × S1 × S1 which are parameters of thepasting angles ; i.e., the rotation angles of the pasting maps. (This is not normallya unique association for degenerate triangle cases.)
Proof. (a) This is proved by a continuity argument. We look at the dense open setD0 ⊂ C0
of triangular representations from Proposition 5.2. Taking a triangular representationh0 : π1(S0)→ SO(3) associated with a triangle of angles all equal to 2π/5 and h1(S1)→SO(3) associated with the same triangle, then h0 = h1. Let h0 : π1(Σ) → SO(3) be therepresentation obtained from h0 and h1 with gluing maps equal to I.
There is an open subset of D0 where induced h0 and h1 have angles θ′i and θi so thatθ′i = θi for i = 0, 1, 2: At h0, we see that θ′i = θi for i = 0, 1, 2 by construction. As afunction of D0, θi and θ′i form continuous functions since these are obtainable as traces ofholonomies of boundary curves. So by continuity and equation 18, it follows that thereexists a neighborhood where the angles are equal. Since triangular representations aredetermined by angles, we can conjugate so that h0 = h1.
By continuity argument again, this holds for all of C0.(b) From (a), this is true for elements of D0 as the elements of S1 × S1 × S1 are
determined by the rotation angles of pasting maps P0, P1, P2 at the respective vertices ofthe triangle.
For the element d in the boundary of D0, we take a sequence di ∈ D0 converging to d.Associated to each d, we obtain a spherical triangle, of G and an elements Pi with pastingangles (φi0, φ
i1, φ
i2) in S1 × S1 × S1. We can take a subsequence so that (Ti, φ
i0, φ
i1, φ
i2)
is convergent. Let (T∞, φ∞0 , φ
∞1 , φ
∞2 ) denote the limit. The associated triangle Ti with
angles assigned converges a generalized pointed triangle T∞ with assigned angles that arerespective limits of the sequences of angles of Pi.
Since SO(3) is compact, each pasting map P ij , j = 0, 1, 2, for di converges to an auto-
morphism P∞j with angle θ∞j for j = 0, 1, 2. It is straightforward to see that d can be
realized as a pair of generalized triangles T∞ and its copy and pasting maps P ij , j = 0, 1, 2.
�
5.3. Define the map T . We will now define a map from G× T 3 to C0 which is almosteverywhere 4 to 1. Let us define a map
T : G× T 3 → C0 ⊂ rep(π1(Σ), SO(3)).
Take an element of G. This gives us a spherical triangle perhaps degenerate with anglesassigned. Actually, this map is induced from a map
T ′ : G× T 3 → C ′0 ⊂ Hom(π1(Σ), SO(3))

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 27
d
!
!!
!!!
IV
A
A’
B
B’
C
C’a
b c
Figure 9. The identification by the Klein four-group action
where C ′0 is the component corresponding to C0 and there is a commutative diagram:
G× T 3 T ′−−−→ C ′0 ⊂ Hom(π1(Σ), SO(3))
q0
y q1
yG× T 3 T−−−→ C0 ⊂ rep(π1(Σ), SO(3)).
Here, q0 is the quotient map under the isometric actions on the metric space of generalizedtriangles and q1 one under the conjugation action of the space of representations.
We define the map T ′ from G× T 3: If the triangle is nondegenerate, then we can gluetwo copies with vertices removed along the open edges and obtain a pair of pants, fromwhich we obtain a representation of π1(S0)→ SO(3). We obtain the second pair of pantsS1 using the exactly the same method. We choose base points x∗i for on Si respectivelyfor i = 0, 1. Let Si to be consisting of two triangles T 0
i , T1i where T 0
i has the base-pointof Si for i = 1, 2. We put T 1
i in the standard position and obtain the elements of SO(3)corresponding to cij. Actually T 0
i are identical with T 1i and so are the representations.
Using (φ0, φ1, φ2) ∈ T 3, we assign the gluing maps to be the rotations of those anglesrespectively at the fixed points of holonomies of the boundary components of S0 and S1
as above.If the triangle is degenerate, i.e., a pointed hemisphere, a pointed lune, a pointed seg-
ment, or a pointed singleton, we can do the similar construction as above considering themas having infinitesimal edges if necessary. From this one obtains the full-representations.
The map T ′ induces a map T since the isometry action on G and pasting map resultsin conjugation of corresponding holonomies in Hom(π1(Σ), SO(3)).
5.4. Extending IA, IB, and IC. In fact IA, IB, IC extends to G× T 3 since our action isjust taking different fixed point for two vertices of the triangle and then the pasting anglechanges correspondingly also. We describe the action below where IA, IB, IC inside are

28 SUHYOUNG CHOI
the actions in G described above:
IA : (x, φ0, φ1, φ2) 7→ (IA(x), φ0, 2π − φ1, 2π − φ2)
IB : (x, φ0, φ1, φ2) 7→ (IB(x), 2π − θ0, φ1, 2π − φ2)
IC : (x, φ0, φ1, φ2) 7→ (IC(x), 2π − φ0, 2π − φ1, φ2).(20)
We remark that T ◦ IA = T ◦ IB = T ◦ IC = T . In Subsections 5.5, 5.6, 5.7, and 5.9, wewill introduce equivalence relation based on making T injective on facial regions timesT 3. From this reason, we will see that IA, IB, and IC extend to the quotient spaces aswell.
5.5. The interior equivalence relation.
Proposition 5.4.
T : G× T 3 → C0 ⊂ rep(π1(Σ), SO(3))
is onto and 4 to 1 branched covering from the interior of G×T 3 to the dense open subsetof C0, i.e., triangular subset, given by the action of the Klein four-group described byequation 20.
Proof. First, T |Go × T 3 is onto the set of triangular representations in C0 since a nonde-generate spherical triangle and three pasting angles determine a triangular representationπ1(Σ) → SO(3) up to conjugations and hence a point in C0. Since the set of triangularrepresentations in C0 are dense, T is onto C0 as a consequence by Proposition 5.3.
A triangular holonomy of a pair of pants determines a triangle only up to the action ofthe group of order 4 generated by IA, IB, IC . Given a triangle realized by the holonomy,the other three are given as follows: Extend the three sides into great circles and dividethe sphere into 8 triangles. Take only four with same orientation as the given triangle.These are the ones obtainable by the action of the group. We take the identical trianglesfor π1(S0) and π1(S1).
For example, IA can be realized as taking the opposite triangle at the vertex v0 and IBat v1 and IC at v2. We can assume that our triangle is always one of the four possibleones.
The pasting maps themselves are independent of the choice of triangles among the four.However, the fixed point used to measure the angle become antipodal in our picture. Inthis case, the rotation angle becomes 2π minus the rotation angle as measured originallybecause of the orientation consideration.
�
Remark 5.5. If h is triangular, then the triangles can be put into unique standard positionup to {I, IA, IB, IC}-action and the pasting angles are uniquely determined. Thus, the setof triangular representations and Go×T 3/{I, IA, IB, IC} are in one-to-one correspondence.In fact, the two spaces are homeomorphic.
But if h is nontriangular, then there may be more than one way to conjugate h|π1(S0)and h|i∗π1(S1) so that they correspond to generalized triangles in standard position. Infact, the centralizer of the restrictions are precisely the ambiguities here as will be ex-plained.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 29
5.6. The equivalence over regions a, b, c, and d. We can think of the region a asa subset of [0, π] × [0, π] × [0, π] given by equation θ0 + θ1 + θ2 = π. a is to be theregion given by θ0, θ1, θ2 ≥ 0. Consider a× T 3 and the equivalence relation generated bytranslations by vectors parallel to (2π, 2π, 2π) which was determined to have the sameabelian representations. Thus, we consider this a circle action generating the equivalences.
For b × T 3, the equivalence class is generated by translations by vectors parallel to(2π,−2π, 2π), for c×T 3, it is generated by translations by vectors parallel to (−2π, 2π, 2π),and finally for d× T 3, it is generated by translations by vectors parallel to (2π, 2π,−2π).Thus, there are circle actions in each region above these face.
Let us look at a × T 3/ ∼ in more detail: So the equation determining the equiv-alence class representatives should be φ0 + φ1 + φ2 = 0 as 2π = 0 in S1 × S1 × S1
with an order three translation action. We take subset of T 3 given by this equation.Looking at T 3 as a quotient space of the cube [0, 2π]3, we see that the plane corre-spond to the union of two triangles with vertices 41 = 4([2π, 0, 0], [0, 2π, 0], [0, 0, 2π])and 42 = 4([2π, 2π, 0], [2π, 0, 2π], [0, 2π, 2π]). Then two triangles form a 2-tori T ′ underthe identifications of T 3. There is an identification by the above S1-action. T ′ is isometricwith a torus in the plane quotient out by a lattice generated by translation by (2π
√2, 0)
and (π√
2, π√
6). Then the idenfication group is generated by a translation by (π, π√
6/3),which is of order three. The quotient space T 2
a is homeomorphic to a 2-torus. Thus, therepresentation space here is in one-to-one correspondence with a× T 2
a .Similarly, for other faces, we obtain trivial 2-torus fibrations as well.
Proposition 5.6. (i) The set of abelian representations is in one-to-one correspon-dence with T 4/ ∼ where ∼ is given by
(φ0, φ1, φ2, φ3) ∼ (2π − φ0, 2π − φ1, 2π − φ2, 2π − φ3)
where coordinates are rotation angles of h(c1), h(c2), h(d1), h(d2) respectively at acommon fixed point determined up to the antipodal map.
(ii) Every abelian representation π1(Σ)→ SO(3) is represented as an element over oneof the regions a, b, c, and d ; In fact as an element in the above 2-torus fibrationof any one of the region a, b, c, and d of your choice.
(iii) The set of abelian representation is in one-to-one correspondence with a× T 2a / ∼
where ∼ is given by action of the discrete group on the plane given by θ0+θ1+θ2 = πgenerated by the action of {I, IA, IB, IC} as in equation 20.
(iv) The above quotient space is homeomorphic to a generalized Seifert space where thebase space is a sphere with four singular points of order two with fiber homeomor-phic to T 2 and exceptional fibers are spheres with four singular points.
Proof. (i) If we choose a fixed point in the antipodal pair of fixed points, then the angles aregiven. If we choose the other fixed point, then the angles are given as the complementaryone to the former ones. Therefore, the second item follows.
(ii) If h is abelian, then h has a common pair of antipodal points which are fixed points.The generalized triangle determined is then either a point or a segment of length π andthe gluing transformations have fixed points in the vertices. Thus, h correspond to anelement over one of the regions a, b, c, and d.

30 SUHYOUNG CHOI
(iii) The angles θi of the triangle are half of the rotation angles. a is the fundamentalregion of the subspace of T 3 given by θ0 + θ1 + θ2 = π by the above action. Given anrepresentation h, we can choose h(c0), h(c1), and h(c2) uniquely up to the actions so thatthe angles divided by 2 satisfy the relation. For pasting angles also can be chosen tosatisfy the relation as above.
(iv) The four singular points come from the vertices which identifies to a point and themiddle point of the edges of the triangle a. (See Lee-Raymond [17].)
�
We describe what are over regions b, c, and d as well. Again, b, c, and d are consideredsubspaces of the quotient of the cube as above given by respective equations:
θ1 = θ0 + θ2 − π, θ0 = θ1 + θ2 − π, θ2 = θ0 + θ1 − πdetermined by inequalities θ0, θ1, θ2 ≥ 0. In fact, over the region b, the above spaceis homeomorphic to b × T 2
b / ∼ where Tb is a subset of T 3 determined by the equationφ1 = φ0 + φ2 − 2π and the order three translation group action and ∼ is given by theaction of {I, IA, IB, IC} as in equation 20. The descriptions over c, d are analogous alsoand are quotients of c× Tc and d× Td by appropriate equivalences.
5.7. Equivalence relations for regions I, II, III, IV . The points over regions I, II,III, IV are ones corresponding to the representations π1(Σ) that factor into F2 sendingc0, c1, and c2 to identity since there have triangles with angles either equal to 0 or π.We choose a map Σ to a bouquet of two circles such that d1 and d2 corresponds to thegenerators of F2. We denote those representations by H(F2) by an abuse of notation sinceh : F2 → SO(3) corresponds to h′ : π1(Σ)→ SO(3) so that h′ = h ◦ f∗.
The map Ti : i × T 3 → H(F2) where i = I, II, III or IV is defined by sending theconfiguration and assigned angles to the equivalence class of the associated representation.That is, Ti are restrictions of T . We are interested in finding the equivalence relation tomake these maps injective.
The map Ti can be constructed as follows for any region I, II, III, and IV : Let v0, v1,and v2 be the three points on a great circle or a segment corresponding to the element of4i in the clockwise orientation and φ0, φ1, and φ2 the associated pasting angles. To beginwith, suppose that the none of the angles are zero or π and that any two of v0, v1, and v2
do not coincide or coincide with an antipode of the other points.The vertices v0, v1, and v2 give us the orientation of the boundary of the generalized
triangle. For exampe, in case I, we take one triangle 41 in the outside of the great circleand another one 42 inside. In all cases, the two triangles are oriented in a clockwisedirection. They have respective edges sharing a common great circle passing through v0.41 has two vertices v0 and v1 with angles π−φ0/2 and φ1/2 respectively. The remainingvertex w1 has an angle η1, 0 ≤ η1 ≤ π. Since 41 is outside, the vertices v1, v0, and w1
are in clockwise direction in the boundary. 42 has two vertices v0 and v2 with anglesπ − φ0/2 and φ2/2 respectively. The remaining vertex w2 has an angle η2, 0 ≤ η2 ≤ π.Since 42 is inside, v2, v0, w2 are in clockwise direction in the boundary. (See Figure 10 inthe case of region I.)
Recall that Rx,θ denote an isometry with fixed points x,−x which rotates about the xin the counter-clockwise direction of angle θ.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 31
v
!
!
"
"2
!
!
#$
#$ /20
0
/21
/22
/2
1
1w2
1
2
0
w
v
v
Figure 10. Finding holonomy of d1 and d2 using triangles for region I.
The isometry which is a composition of Rv0,2π−φ0 and Rv1,φ1 has a fixed point at w1
and a rotation angle 2π− 2η1. Similarly, the isometry which is a composition of Rv1,2π−φ0
and Rv2,φ2 has a fixed point at w2 and a rotation angle 2π − 2η2, which follows from theconsideration as in Section 2. In this way, we obtain two isometries corresponding to d1
and d2.Let us illustrate more details here for region I case only (The other regions are similarly
treatable): We still suppose that v0, v1, v2 do not coincide or coincide with an antipode ofthe other points: If φ0 is zero, then we use w1 to be −v1 and d1 is mapped to the rotationabout −v1 of angle 2π − φ1 and w2 is to be −v2 and d2 is a rotation about −v2 of angle2π − φ2. (Here we are using lunes as degenerate triangles to compute these. )
If φ0 is 2π, then we use w1 to be v1 and w2 be v2 and d1 is a rotation about v1 of angleφ1 and d2 is a rotation about v2 of angle φ2.
If φ1 is zero and others are not zero or 2π, then we let w1 be v0 and d1 is a rotationabout v0 of angle 2π−φ0, and the other triangle is constructed as above by angles 2π−φ0
and φ2 and we obtain d2 as in the above nondegenerate triangle T2 case.If φ1 is 2π and others are not zero or 2π, then we let w1 be −v0 and d1 be a rotation
about −v0 of angle φ0 and we let w2 and d2 be determined as in the above nondegenerateT2 case.
If φ2 is zero and others are not zero or 2π, then we let w2 be v0 and d2 is a rotationabout v0 of angle 2π − φ0, and the other information is analogously determined to asabove for the nondegenerate T1 case.
If φ2 is 2π and others are not zero or 2π, then we let w2 be −v0 and d1 be a rotationabout −v0 of angle φ0 and the other information is analogously determined as above forthe nondegenerate T1 case.
If φ1 = φ2 = 0, then we let w1 = w2 = v0 and d1 and d2 are respectively rotations ofangle 2π − φ0 at v0.
If φ1 = 0, φ2 = 2π, then we let w1 = v0, w2 = −v0 and d1 is a rotation about v0 of angle2π − φ0 and d2 is a rotation of angle φ0.

32 SUHYOUNG CHOI
If φ1 = 2π, φ2 = 0, then we let w1 = −v0, w2 = v0 and d1 is a rotation of angle φ0 about−v0 and d2 is a rotation of angle 2π − φ0 about v0.
Finally, suppose that some of v0, v1,2 coincide or coincide with an antipode of the otherpoints. Then we have an abelian representations over one of the regions a, b, c, and d,which we studied above.
Remark 5.7. Note that our construction of di and the fixed points wi depends smoothlyup to trivial equivalences when ηi = 0, π on the data vi, φi. Hence, our constructioneasily extends to a construction on SU(2) where the angles are restricted to be in [0, 2π].However, to obtain d1 and d2 we have to multiply by −I or to take the antipode to theresult obtained from the spherical triangle construction. (See Equation 12 and Subsection2.2.)
Proposition 5.8. The map
T :⋃
i=I,II,III,IV
4i × T 3 → H(F2)
is onto. In face, Ti is onto for each i.
Proof. We let one of the vertex so that the remaining have angle zero. This realizes allsegment with angles at vertices.
�
Under the K = {I, IA, IB, IC} action as in Equation 20, the regions I, II, III, IVare actually identical as well as the maps Ti since we can easily show that Ti = Tj ◦ fholds for f ∈ K if f sends i to j. (That is, we show that they correspond to the samerepresentations.) Thus, we introduce the equivalence that elements x ∈ 4i × T 3 is isequivalent to y ∈ 4j × T 3 if y = f(x) under f ∈ K sending 4i to 4j.
Finally, we introduce the equivalence so that two elements of 4i × T 3 are equivalent ifit maps to the same point of H(F2).
5.8. An aside. For completeness, let us state:
Proposition 5.9. Given a point with assigned length l0, l1, l2 in the regions I, II, III,and IV , none of which are zero, the map T restricted to T 3 fiber is not onto H(F2) andis homotopic to a map into the boundary, i.e., to the set of conjugacy classes of abelianrepresentations in H(F2).
Proof. We show that the image of T 3 cannot be onto. If not, there exists a sequence ofpoints (φi0, φ
i1, φ
i2) of T 3 whose associated representation converges to an abelian repre-
sentation of rank at least two so that the two generators of the abelian representationshave different rotation angles up to antipodal actions. Then the fixed points of two gener-ators of the abelian representations are either antipodal or the same. However, the fixedpoints are fixed and hence only possibility to converge to an abelian representation is that(φi0, φ
i1) → (0, 0) or (φi0, φ
i2) → (0, 0) or (φi1, φ
i2) → (0, 0) up to choices of subsequences.
But the image of the limiting homomorphism is of rank one.Actually the map T 3 → H(F2) lifts to B3 before the identity collapse. The above
argument shows that the image is still not onto. Therefore, the map is homotopic to theboundary of B3 and the result follows. �

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 33
!
0
v
v
w
w
2
0
1
v 1
2
2
2
1"
"1!
!
Figure 11. Finding holonomy of d1 and d2 using triangles when θ1 = θ2.
5.9. The equivalence relation on A,A′, B, B′, C, C ′. Next, we wish to consider therepresentations so that one of h(ci) is identity and do not correspond to representationsover the interior of regions I, II, III, and IV . Then these representations correspond toones over the regions A,A′,B, B′, C, and C ′.
Let us define CA, CA′ , CB, CB′ , CC , and CC′ as the subspace of C0 that can be describedas having the pair of pants S0 representation as described by the generalized triangles inregions A,A′,B,B′, C, and C ′ respectively.
5.9.1. Region B. We consider the region B first. Then θ0 = π and θ1 = θ2 and v1 and v2
are antipodal and v1 and v2 are vertices of a lune L with angle θ1 = θ2 at v1 or v2.Suppose v0 is equal to v1 or v2. In the former case, h(d1) is a rotation about v1 of angle
φ1 − φ0 and h(d2) is one about v2 of angle φ2 + φ0. In the later case, h(d2) is a rotationabout v2 of angle φ1 +φ0 and h(d2) is one about v2 of angle φ2−φ0. (This is covered alsoin Subsection 5.6.)
Now suppose that v0 is distinct from v1 and v2. To compute the holonomy of h(d1)and h(d2), let l be the segment containing v0, v1, v2 which is a side of the lune L. Thenwe draw a clockwise oriented spherical triangle T1 with vertices v0, v1 of angles φ1/2 andπ− φ0/2 respectively. Then h(d1) is the rotation about the third vertex w1 of T1 of angleτ1 equal to 2π minus twice the vertex angle.
Similarly, we construct a clockwise oriented spherical triangle T2 with vertices v0, v2 ofangles π − φ0/2 and φ2/2 respectively. Then h(d2) is the rotation about the third vertexw2 of T2 of angle τ2 equal to 2π minus twice the vertex angle.
By allowing degenerate triangles, we can let φ0 = 0 or 2π as well, in which case, w1
becomes v1 or v2 respectively and T1 a pointed segment or a pointed lune. Therefore,our representation is one which send c1 and c2 to rotations about v1 and v2 of respectiverotation angles θ1 and θ2 and d1 and d2 to the rotations about v1 and v2. Thus, therepresentations are abelian ones and are over regions a, b, c or d. (Actually, these are onlyabelian ones if v0 does not equal v1 or v2.) The equivalence over the region were studiedabove in Subsection 5.6.
Suppose now that 0 < φ0 < 2π. d1 and d2 correspond to two pairs of fixed points(w1,−w1) and (w2,−w2) in S2. We draw a great circle S1 through v0, v1, and v2 = −v1
separating w1 and −w1. The fact that 0 < φ0/2 < π implies {w1,−w1} and {w2,−w2}are distinct from {v1, v2}. Let s0 denote the segment of length π with endpoints v1 andv2 through v0 in S1.

34 SUHYOUNG CHOI
We change definition here temporarily: the lune simply means a disk bounded by twosegments of length π ending at a pair of antipodal points. If the vertex angle is ≤ π, thenthe lune is convex.
We choose one segment s1 and s2 with vertices v1 and v2 through w1 or w2 respectively.Then we obtain the lune L bounded by two of these bounded by a union s1 and s2. Weconstructed a lune L containing s0.
We see that the segment s′ that is a union of two edges in T1 and T2 respectively throughv0 ends in w1 and w2. Let v0 is the intersection point of s and s′. The boundary of L ands and s′ bound four triangles two of which are T1 with vertices v1, v0, and w1 and T2 withvertices v2, v0, and w2.
Since φ1/2 and φ2/2 are angles at v1 and v2 of triangles T1 and T2 with vertices w1 andw2 respectively φ1/2 + φ2/2 is the angle of the lune L containing both triangles T1 andT2 while agreeing with them in parts of edges.
Thus, there is a mapTB : B × S1 × S1 × S1 → CB
0
where CB0 denote the subspace in C0 of representations over the region B. The map is
onto since any representation in CB0 can be realized by above constructions of triangles
and lunes. Here B is parameterized by l0 and θ1 where θ1 = θ2. Up to isometry v1 and v2
are determined unless we are at the end tie, where θ1 = θ2 is either 0 or π.Actually, the isometry class of ordered set of the four points w1, w2, v1, and v2 and
the respective rotation angles of h(d1) and h(d2), η1 and η2, completely determines theconjugacy class of the representation and vice versa. We can change wi to its antipodeand the rotation angle changes to 2π− ηi for h(di). We can also change v1 and v2 to theirantipodes. This changes their angles θi to 2π − θi and φi to 2π − φi for i = 1, 2 but donot change the other two angles. Therefore the configuration spaces of four points twoof which are antipodal with their angles with an action given by taking antipodes andangles is in one-to-one correspondence with CB
0 . We will determine the topology of theconfiguration space and hence the topology of CB
0 in Section 7.We can introduce the equivalence relation on B×S1×S1×S1 by demanding the TB be
injective. To see more details, we will introduce them as geometric equivalence relationsto make TB one-to-one and onto. The equivalence relation is so that two are equivalentif they correspond to the same SO(3)-representation of π1(Σ) with condition that v1 andv2 are fixed:
For the region B × T 3, we first introduce the equivalence relation is given by
(v1, l1, 0, φ1, φ2) ∼ (v1, l′1, 0, φ1, φ2)
for arbitrary pair of l1 and l′1 and
(v1, 0, φ0, φ1, φ2) ∼ (v1, π, 2π − φ0, φ1, φ2).
There is also a circle action giving us further equivalences: Suppose that w1 and w2 donot coincide with v1 or v2. (By construction, if one of w1 and w2 do, then the other hasto also and we have an abelian representation.) Then there is some v0, v1, and v2 wherev0 is not identical with v1 or v2. For any choice of v0 in the great circle containing w1 andw2, we choose s0 correspondingly and generalized triangle with vertices v0, v1, and w1 sothat the angle at w1 is π minus half of the angle of h(d1) at w1. This can be achieved

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 35
!w
w
w
v v
v
1
12
2
0
1
Figure 12. The circle action.
by taking a generalized triangle with possibly > π angle at v1. If the angle is > π, wesubtract π from it. This amounts to replacing w1 to its antipode and the angle η1 to be2π − η1. The angle at v0 is always in [0, π], which does not change the rotation angle ofP0 at v0. (See Figure 12.)
Similarly, we can repeat the constructions for v0, v2, w2. Therefore, there is an S1-action.Actually the choice of fixed point for h(di) among an antipodal pair gives possibilities
for s0 and conversely the choice of s0 forces choices of fixed points of h(di).If w1 or w2 coincide with v1 or v2, then the angle at v0 is 0 or π or v0 agrees with v1 or
v2, thus we are reduced to abelian representations. For abelian representations the anglesat w1 and w2 matter only and the equivalence relations are clear. There is also a circleaction given by changing φ1 which is a continuous extension of the above circle action.
If the rotation angle at w1 or w2 is zero or 2π, we see from the peculiarity of the triangleconstruction that we must have that φ0 is 0 or 2π or v0 coincide with v1 or v2 and we arereduced to above abelian cases.
By circle actions, we can always make our situation so that φ1 = 0 or φ2 = 0. We callthese the canonical representative, and every representation has canonical representatives.Then the map
FB : B × S1 × {0} × S1/ ∼→ CB0
and
FB : B × S1 × S1 × {0}/ ∼→ CB0
are easily seen to be surjective (generically 4 to 1) with obvious equivalence is fromequations 13 and 14.
Now, we consider the equivalence when v1 and v2 are switched and w1 and w2 are fixed.This is a transformation IB on B given by sending v1 and v2 to their antipodal points

36 SUHYOUNG CHOI
and v0 to itself. This sends pasting angles
(θ1, l1, φ0, φ1, φ2) 7→ (π − θ1, π − l1, φ0, 2π − φ1, 2π − φ2)
(π, l1, φ0, φ1, φ2) 7→ (π, π − l1, φ0, 2π − φ1, 2π − φ2)
(0, l1, φ0, φ1, φ2) 7→ (0, π − l1, φ0, 2π − φ1, 2π − φ2)(21)
The last two line are not considered IB action but come from the fact that switchingvertices has no effect here on h(c1) and h(c2). (See Subsection 5.9.2 for more details.)
Note that IB acts on the union of fibers above mid-tie but sends other ties to differentones. IA and IC do not preserve B and hence do not appear in equivalences for B only.For end ties, we have further equivalences introduced by mapping into the regions aboveI, II, III, or IV .
We are able to show that the equivalence relation ∼ given by all of above gives us aone-to-one and onto map:
TB : B × S1 × S1 × S1/ ∼→ CB0 .
We omit the geometric proof since the equivalence relation can be defined as one whichmakes this one-to-one and onto.
Proposition 5.10. There is a well-defined induced map TB : B×S1×S1×S1/ ∼→ CB0 .
This map is one-to-one and onto.
The restrictions to canonical choices φ1 = 0 or φ2 = 0 also give us surjective maps,generically 4 to 1, where the equivalence is easier to see.
5.9.2. Region Bπ and B0. Let Bπ be the subset of B where θ1 = θ2 = π and B0 the subsetof B where θ1 = θ2 = 0.
We consider the restriction TBπ |Bπ × S1 × S1 × S1. Here the representations are inH(F2) since h(ci) are all identity.
By considering the choice of v0, we have an S1-action, which we will not discuss indetail. Also, there is an action switching v1 and v2 which preserves Bπ × S1 × S1 × S1.These give rise to the above equivalences as above. We can define similar equivalencerelations for B0 as well. (See equation 21.)
The representation correspond to the two fixed points of h(d1) and h(d2) and theirrotation angles. Again there is a Klein four-group action on it by taking the fixed pointthe antipodal ones.
Actually Bπ is an interval isomorphic to I = [0, π]. Recall that H(F2) can be identifiedwith Bπ × S1 × {0} × S1/ ∼ where ∼ is given by sending elements to the fixed point ofh(d1) and h(d2) and rotation angles and their distances and by equations 13 and 14. (SeeSection 3.2.) Similarly, we can do this for Bπ × S1 × S1 × {0}.
Proposition 5.11.TBπ : Bπ × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Let ∼ denote the restricted equivalence relation given in B × T 3.Similarly, we have
TB0 : B0 × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Let ∼ denote the restricted equivalence relation given in B × T 3.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 37
Again, restrictions to canonical choices also give us surjective map where the equivalenceis easier to see.
5.10. Region B′. Over the region B′, the triangle is a segment s with a vertex v0 andanother vertex v1 = v2. Drawing segments s1 and s2 of length π from v1 to −v1 of anglesφ1/2 and φ2/2 respectively and drawing a segment s0 from v0 of angle π−φ0/2, we obtaintwo triangles T1 and T2 sharing an edge s. The respective vertices w1 and w2 of T1 andT2 are fixed points of h(d1) and h(d2) and the respective angles are half of those of h(d1)and h(d2).
The configuration space we have to consider is given by the point v1 = v2 with therotation angles for h(c1) and h(c2) and the fixed points w1 and w2 and their rotation anglesfor h(d1) and h(d2) respectively. Again, we will find the topology of the configuration spaceand hence CB′ in Section 7.
Let us discuss the equivalence relation: For the region B′ × T 3, we first introduce theequivalence relation given by
(v1, l1, 0, φ1, φ2) ∼ (v1, l′1, 0, φ1, φ2)
for arbitrary pair of l1 and l′1 and
(v1, 0, φ0, φ1, φ2) ∼ (v1, π, 2π − φ0, φ1, φ2).
As above, we can choose s differently not changing v1 = v2 but changing v0 on the greatcircle containing s0 and this changes φis but the representation itself do not change. Wemay have to consider generalized triangle with one angle > π, where we have to subtractby π. This gives us S1-action, which we will not describe in detail.
We also have a notion of canonical representatives by letting φ1 = 0 or φ2 = 0. so thatthe restriction to B′ × S1 × {0} × S1 or B′ × S1 × S1 × {0} are still onto.
Choosing v1 = v2 to be its antipode gives us IB action as above. The formulas areexactly the same. (See equation 21.) The above and this S1-action and IB actions givesus the needed equivalence relation ∼.
Thus, there is a onto map TB′ : B′ × S1 × S1 × S1/ ∼→ CB′0 where CB′
0 denote thesubspace in C0 of representations over the region B′. (Actually, B′ is equivalent to Bunder IA but we will not need this fact explicitly for the equivalences on B′ itself.)
Proposition 5.12. There is a well-defined induced map TB′ : B′×S1×S1×S1/ ∼→ CB′0 .
This map is one-to-one and onto.
Similarly, we have:
Proposition 5.13.
TB′π : B′π × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Let ∼ denote the restricted equivalence relation given in B × T 3.Similarly,
TB′0 : B′0 × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Let ∼ denote the restricted equivalence relation given in B × T 3.

38 SUHYOUNG CHOI
5.11. Region A. Let us now consider CA and CA′ . (Again, they are equivalent under IBbut we will not need this fact. )
We consider A first. Here v2 is on the segment of length π with endpoints v0 and v1.To obtain h(d1) and h(d2), we consider a triangle T2 with vertices v2, v0 and w2 and withangles φ2/2 and φ0/2 at v2 and v0 respectively. The vertex w2 is the fixed point of h(d2)and the vertex angle η2 is half of 2π minus the rotation angle of h(d2). h(d1) is a rotationabout v1 with angle φ1 − φ0 and w1 = v1.
Let us discuss the equivalence relation: For the region A × T 3, we first introduce theequivalence relation is given by
(v0, l0, φ0, φ1, 0) ∼ (v0, l′0, φ0, φ1, 0)
for arbitrary pair of l1 and l′1 and
(v0, 0, φ0, φ1, φ2) ∼ (v0, π, φ0, φ1, 2π − φ2).
Again, a circle action is given by taking a different segment s′ with endpoints v0 andv1 = −v0. Then v2 is obtained as an intersection of s′ with the great circle through w2
which has angle η2 with respect to the shortest segment to v0 from w2. This again involvesgeneralized triangles and changing the angle θ1/2 to θ1/2− π if θ1/2 > π.
If we choose a segment s with endpoints v1 and v0 passing through w2, then v2 = w2 andh(d2) has the rotation angle φ2, φ0 = 0, and h(d1) is now a rotation about v1 with angleφ1. We can also choose so that φ1 = 0 by making φ0 be equal to 2π minus the rotationangle of h(d1). We call these the canonical representatives. Thus, every representationhas canonical representatives.
Thus, the configurations that we need to classify is an antipodal pair (v0, v1) and achoice of fixed point w2,−w2 and the rotation angles of h(d2) and h(d1).
Also, the different antipodal choices of v0, v1 give us IA-action:
(v0, l0, φ0, φ1, φ2) 7→ (π − v0, π − l0, 2π − φ0, 2πφ1, φ2)
(0, l0, φ0, φ1, φ2) 7→ (0, π − l0, 2π − φ0, 2πφ1, φ2) and
(π, l0, φ0, φ1, φ2) 7→ (π, π − l0, 2π − φ0, 2πφ1, φ2).(22)
The last two are not considered IA action but arise in similar way to equation 21.We define the equivalence relation ∼ on A × S1 × S1 × S1 to be one generated by all
the equivalence relations we introduced.Therefore we define a map
TA : A× S1 × S1 × S1 → CA
by sending it to one of the canonical choice and then to the holonomy. We note thatA× {0} × S1 × S1 → CA and A× S1 × {0} × S1 → CA are onto since we can let φ0 = 0or let φ1 = 0 and obtain all representations.
Proposition 5.14. The induced map TA : A× S1 × S1 × S1/ ∼→ CA is one-to-one andonto.
Again let Aπ and A0 denote the subsets of A defined by θ0 = π and θ0 = 0 respectively.The map
TAπ : Aπ × {0} × S1 × S1 → H(F2)

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 39
v
! 2
0"#$
2"
1w
2w
v2
1
0v
Figure 13. Finding holonomy of d1 and d2 using triangles for case A.
is given by(l0, π, 0, φ1, φ2)→ (l0, φ1, φ2),
which is clearly onto and is generically four to one as above in case B. Aπ×S1×S1×S1 hasequivalence relation induced from that of A×S1×S1×S1 so that the above is one-to-oneand onto above. Similar discussions apply to Aπ × S1 × {0} × S1 → CA, and similarstatements hold for A0 as well.
Proposition 5.15.TAπ : Aπ × S1 × S1 × S1/ ∼→ H(F2)
is a one-to-one and onto map. Similarly,
TA0 : A0 × S1 × S1 × S1/ ∼→ H(F2)
is a one-to-one and onto map.
The restrictions to canonical representative gives a surjective (generic 4 to 1) maps.
5.12. Region A′. Now, consider the region A′. v0 = v1 and v2 are the endpoints of asegment of length ≤ π. To obtain h(d1) and h(d2), we consider a triangle T2 with verticesv2, v0 and w2 and with angles φ2/2 and φ0/2 at v2 and v0 respectively. The vertex w2 isthe fixed point of h(d2) and the vertex angle is half of the rotation angle of h(d2). h(d1)is a rotation about v1 with angle φ1 − φ0.
For the region A′×T 3, we introduce as above for A the equivalence relation is given by
(v0, l0, φ0, φ1, 0) ∼ (v0, l′0, φ0, φ1, 0)
for arbitrary pair of l1 and l′1 and
(v0, 0, φ0, φ1, φ2) ∼ (v0, π, φ0, φ1, 2π − φ2).
There is a circle action also given by choosing a different segment from v0 to −v0 andtaking v2 as intersection of a great circle through w2 with the segment. If we choose a

40 SUHYOUNG CHOI
segment s with endpoints v1 and v0 passing through w2, then v2 = w2 and h(d2) has therotation angle φ2. Here φ0 = 0. We can also make φ0 = 0. We call these the canonicalrepresentative. Thus, every representation can has canonical representatives.
Therefore we define a map TA′ : A′ × SI × S1 × S1 → CA′ .We see that A′ × {0} × S1 × S1 → CA′ is onto since we can let φ0 = 0. We omit the
case for φ1 = 0 canonical choices.Again, we define ∼ on A′ × S1 × S1 × S1 by the above equivalence relations. Again IA
actions gives us equivalence relation given by same formula as equation 22.
Proposition 5.16. The induced map TA′ : A′×S1×S1×S1/ ∼→ CA′ is one-to-one andonto.
Again let A′π and A′0 denote the subsets of A′ defined by θ0 = π and θ0 = 0 respectively.The map
TA′π : A′π × S1 × S1 × S1/ ∼→ H(F2)
is given by(l0, π, 0, φ1, φ2) 7→ (l0, φ1, φ2).
By introducing appropriate ∼, we obtain:
Proposition 5.17.TA′π : A′π × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Similarly,
TA′0 : A′0 × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism.
5.13. Region C. Finally, we go to CC and CC′ . Suppose we are over C. Then v1 is onthe segment with endpoints v0 = −v2. To obtain h(d1) and h(d2), we consider a triangleT1 with vertices v1, v0 and w1 and with angles φ1/2 and φ0/2 at v2 and v0 respectively.The vertex w1 is the fixed point of h(d1) and the vertex angle η1 is π minus the half ofthe rotation angle of h(d1). h(d2) is a rotation about v2 with angle φ2 − φ0 and w2 = v2.
For the region C × T 3, we introduce first the equivalence relation given by
(v2, l2, φ0, 0, φ2) ∼ (v2, l2, φ0, 0, φ2)
for arbitrary pair of l1 and l′1 and
(v2, 0, φ0, φ1, φ2) ∼ (v2, π, φ0, 2π − φ1, φ2).
Again there is a circle action given by choosing a different segment s with endpoints v0
and v2 and taking v1 as an intersection point of s with a great circle through w1 whichhas angle η1 with respect to the shortest segment from w1 to v0.
If we choose a segment s with endpoints v2 and v0 passing through w1, then v1 = w1
and h(d1) has the rotation angle φ1. Here φ0 = 0. We can also make φ2 = 0 by makingφ0 have angle 2π minus the angle of h(d2). We call these the canonical representatives.Thus, every representation has canonical representatives.
Therefore we define a map TC : C × S1 × S1 × S1 → CC .We see that C × {0} × S1 × S1 → CC is onto since we can let φ0 = 0. There are
equivalence relations on {0}×S1×S1×C: We omit the cases of φ2 = 0 canonical choices.We define the equivalence relation ∼ using the above ones.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 41
1
v
v
w
2
0
1
!
"#$ 0
"1
v1
w2
Figure 14. Finding holonomy of d1 and d2 using triangles.
Proposition 5.18. The induced map TC : C × S1 × S1 × S1/ ∼→ CC is one-to-one andonto.
Again let Cπ and C0 denote the subsets of C defined by θ0 = π and θ0 = 0 respectively.The onto map
TCπ : Cπ/ ∼→ H(F2)
is given by(l0, π, 0, φ1, φ2)→ (l0, φ1, φ2).
Proposition 5.19.TCπ : Cπ × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Similarly,
TC0 : C0 × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism.
5.14. Region C ′. We are over C ′ finally. Then v1 is an endpoint of the segment with theother endpoint v0 = v2. To obtain h(d1) and h(d2), we consider a triangle T1 with verticesv1, v0 and w1 and with angles φ1/2 and φ0/2 at v2 and v0 respectively. The vertex w1 isthe fixed point of h(d1) and the vertex angle is half of the rotation angle of h(d2). h(d2)is a rotation about v2 with angle φ2 − φ0.
For the region C ′ × T 3, we introduce as the equivalence relation is given by
(v2, l2, φ0, 0, φ2) ∼ (v2, l2, φ0, 0, φ2)
for arbitrary pair of l1 and l′1 and
(v2, 0, φ0, φ1, φ2) ∼ (v2, π, φ0, 2π − φ1, φ2).
Again, there is a circle action. If we choose a segment s with endpoints v2 and v0 passingthrough w1, then v1 = w1 and h(d1) has the rotation angle φ1. Here φ0 = 0. We can also

42 SUHYOUNG CHOI
make φ2 = 0. We call these the canonical representatives. Thus, every representation hascanonical representatives.
Therefore we define a map TC′ : C ′ × S1 × S1 × S1 → CC′ .We see that C ′ × {0} × S1 × S1 → CC′ is onto since we can let φ0 = 0. We omit the
case for φ2 = 0 canonical choices.
Proposition 5.20. The induced map TC′ : S1×S1×S1×C ′/ ∼→ CC′ is one-to-one andonto.
Again let C ′π and C ′0 denote the subsets of C defined by θ0 = π and θ0 = 0 respectively.The map
TC′π : C ′π/ ∼→ H(F2)
is given by(l0, π, 0, φ1, φ2)→ (l0, φ1, φ2).
Proposition 5.21.TC′π : C ′π × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism. Similarly,
TC′0 : C ′0 × S1 × S1 × S1/ ∼→ H(F2)
is a homeomorphism.
5.15. Obtaining the homeomorphism. We will now find the topological structure ofC0 as an identification space obtained from G × T 3. The equivalence relation is namelythe ones we obtained for I, II, III, and IV , and A, A′, B, B′, C, and C ′ and by theaction of {I, IA, IB, IC}.
One can characterize the representations over regions I, II, III, and IV , as ones whichfactor into a free group of rank two representation with a canonical map sending cis tothe trivial element and representations over regions A, A′, B, B′, C, and C ′ as one wheretwo of cis share the fixed points, and representations over regions a, b, c, and d as abelianrepresentations. (The representation where two of ci share the common antipodal pair offixed points are said to be the degenerated representation. )
We will describe the topology in the next section.
Theorem 5.22. The identity component C0 of rep(π1(Σ), SO(3)) is homeomorphic toG × T 3/ ∼. Thus C0 is a topological complex consisting of 3-dimensional H(F2), and4-dimensional CA
0 , CB0 , and CC
0 , and the space of abelian representation, coming from theboundary of the 3-ball G and the 6-dimensional complex from the interior of C0
Proof. The proof is divided into three parts: We show that
T : G× T 3 → C0 ⊂ rep(π1(Σ), SO(3))
induces one-to-one onto map from the quotient space of G×T 3 by the equivalence relationdescribed above.
(i) The fact that the map T is onto follows since we know that the set of equivalenceclasses of triangular representations are dense in rep(π1(Σ), SO(3)) and the map T re-stricted to Go × T 3 to the set of equivalence classes of triangular representations is ontoand T is continuous by Proposition 5.4.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 43
(ii) We now verify the injectivity which was partially done in the above arguments.First, let us look at the interior: By Proposition 5.4, T |Go × T 3/ ∼ is injective onto
the set of conjugacy classes of triangular representations.We now restrict our attention to T |∂G × T 3/ ∼: The representation coming from
∂G × T 3/ ∼ do not coincide with any from Go × T 3/ ∼ since the former one are nottriangular.
The injectivity over each of the region a, b, c, and d to the set of abelian representationwas shown above. The injectivity over each of the regions I, II, III, and IV to H(F2)is proved above also. The injectivity over each of the regions A, A′, B, B′, C, and C ′ tothe space of degenerate representation is also clear and done above. Up to the action ofthe Klein four-group, these are only three distinct maps.
The representations coming from the regions I ×T 3, II ×T 3, III ×T 3, IV ×T 3 do notcoincide with ones over the regions A, A′, B, B′, C, and C ′ removed with I, II, III, andIV . The reason is that two of h(ci) are not identity for the later regions.
Also, the interior of the regions a, b, c, and d times T 3 do not produce representationsfrom the union of the regions I, II, III, IV , A, A′, B, B′, C, and C ′ times T 3. This isso since all h(ci) is not identity in the former case while in the other h(ci) is identity forat least one i.
Because of the identification by {I, IA, IB, IC}-action, we need to consider maps froma, I, A,B,C, and the interior. This completes the proof of injectivity.
(iii) Since SO(3) is a compact Lie group, the space rep(π1(Σ), SO(3)) is Hausdorff. SinceG× T 3 is compact, it follows that T is a homeomorphism.
�
6. The SU(2)-representation space
We will first find the topological type of the SU(2)-representation space of π and thenin the next Section go to the SO(3)-representation space. The following is the classicalresult of Narashimhan, Ramanan, Seshadri [19], [20] which we prove using a differentmethod. However, we will need the smoothness result of Hubueschmann [13].
We first study CP3 as a quotient space of a tetrahedron times a 3-torus. Then werepresent each SU(2)-representation by a generalized triangle and pasting angles as inthe SO(3)-case. A SU(2)-representation of a pair of pants corresponds to a sphericalgeneralized triangle in a one-to-one manner except for the degenerate ones. The spaceof pasting maps in SU(2) is still homeomorphic to S1 but it double covers the space ofpasting maps in SO(3). Thus, we parametrize the pasting angles by [0, 4π] where 0 = 4πcorrespond to I and 2π represents −I for I ∈ SU(2). We denote by S1
2 the quotient of[0, 4π] by identifying the endpoints.
We denote by T 32 the product of the three-copies of S1
2. We find the equivalence relationon G × T 3
2 to make it homeomorphic to the representation space. These equivalencerelations lift the equivalence relations in SO(3)-case. We discuss abelian representationsand discuss the representations over the fattened edges of G showing that they form solidtorus fibrations. The main result of this section Theorem 6.2 will be proved finally.
The arguments are basically the same as in SO(3)-case in above Section 5. The onlydifference is that there are less ambiguity and that we do not need to consider the Klein

44 SUHYOUNG CHOI
four-group {I, IA, IB, IC}-action although we need a Z2-action on the pasting angle spaceT 3
2 .
6.1. The complex projective space. Let CP3 denote the complex projective space.According to the toric manifold theory, CP3 admits a T 3 action given by
(23) (eiθ1 , eiθ2 , eiθ3) · [z0, z1, z2, z3] = [eiθ1z0, eiθ2z1, e
iθ3z2, z3]
and the quotient map is given by
(24) [z0, z1, z2, z3] 7→ π(|z0|2, |z1|2, |z2|2)/3∑i=0
|zi|2, zi ∈ C
The image is a standard 3-simplex 4∗ in the positive quadrant of R3 given by the planegiven by x0+x1+x2 ≤ π and the fibers are the orbits of T 3-actions. The fibers are given byR3 quotient out by the standard lattice L∗ with generators (2π, 0, 0), (0, 2π, 0), (0, 0, 2π).
We can realize CP3 as a quotient space of 4∗×R3 under the equivalence relation givenby L∗-action on R3 fibers and over the face given by x0 = 0, (φ0, φ1, φ2) ∼ (φ0 + t, φ1, φ1)for any real t and over the face given by x1 = 0, (φ0, φ1, φ2) ∼ (φ0, φ1 + t, φ1), t ∈ R andover the face x2 = 0, (φ0, φ1, φ2) ∼ (φ0, φ1, φ1+t), t ∈ R and over the face x0+x1+x2 = π,(φ0, φ1, φ2) ∼ (φ0 + t, φ1 + t, φ1 + t), t ∈ R. We prove the homeomorphism of CP3 withthe quotient space by using Hausdorff compactness property of both spaces.
We give another realization of CP3 for our purposes.
Proposition 6.1. By considering fibers of faces of G, we can realize CP3 as the quotientspace G× T 3
2 of under an equivalence relation given as follows:
• In the interior, the equivalence is trivially given.• For the face a, the equivalence relation on a × T 3
2 is given by (v, φ0, φ1, φ2) ∼(v′, φ′0, φ
′1, φ′2) if and only if v = v′ and two vectors (φ0, φ1, φ2) and (φ′0, φ
′1, φ′2) are
the same up to the S1-action generated by vectors parallel to (2π, 2π, 2π) normalto a.• For faces b, c, and d, the equivalence relation is defined again using the respective
S1-action generated by vectors parallel to (−2π, 2π, 2π), (2π,−2π,−2π), (2π, 2π,−2π)perpendicular to b, c, d respectively.• In the edges and the vertices, the equivalence relation is induced from the facial
ones.• Finally equivalence relation is given by Z2 action sending (φ0, φ1, φ2) to (φ0 +
2π, φ1 + 2π, φ2 + 2π).
There is a natural T 32 -action of CP3 making it a toric variety which is induced by the nat-
ural T 32 -action on G×T 3
2 which behaves well-under the quotient map since the equivalenceclasses are mapped to equivalence classes under the action.
Proof. We basically induce a map from the first description of CP3 to the description ofthe proposition and show the equivalence.
We first note that the lattice L in R3 generated by (4π, 0, 0), (0, 4π, 0), (0, 0, 4π), (2π, 2π, 2π)has a basis (−2π, 2π, 2π), (2π,−2π,−2π), (2π, 2π,−2π). Note that the fiber over the in-terior point in the above is R3 quotient out by this lattice.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 45
We define a map D : 4∗ → G given by the affine mapxyz
7→0 1 1
1 0 11 1 0
xyz
+
πππ
Then L∗ is sent to L by 2 times the inverse transpose of the linear part of D. We now verifythat the quotient space over G and the quotient space over 4∗ are in one-to-one corre-spondence. Again, the compactness and Hausdorff property give us the homeomorphismproperty. �
6.2. The Klein four-group action. There is a natural Klein four-group action gen-erated by three transformations L sending a point [z0, z1, z2, z3] to [z1, z0, z3, z2] and Msending [z0, z1, z2, z3] to [z2, z3, z0, z2] and N sending [z0, z1, z2, z3] to [z3, z2, z1, z0] wherezi are complex numbers. (This will be used in the next section.)
The above action of {I, L,M,N} corresponds to our {I, IA, IB, IC}-action exactly underthis map as given the following equations
IA : (x, φ0, φ1, φ2) 7→ (IA(x), φ0, 4π − φ1, 4π − φ2)
IB : (x, φ0, φ1, φ2) 7→ (IB(x), 4π − θ0, φ1, 4π − φ2)
IC : (x, φ0, φ1, φ2) 7→ (IC(x), 4π − φ0, 4π − φ1, φ2).(25)
6.3. The classical theorem.
Theorem 6.2. rep(π1(Σ), SU(2)) is diffeomorphic to CP3 with the following properties:
• the subset of SU(2)-representation with at least one of h(ci) equal to I or −I formsa solid torus fibration over edges of G where three of them meets in a 3-ball overeach vertex of G where the solid torus degenerates to a 3-ball.• The set of abelian representations χ2(Σ) form a subspace with an orbifold structure
with 16 singularities. It consists of two-torus fibration over faces which meets atthe boundary of the above solid torus fibration and in the boundary of vertex 3-ballsin a twisted manner giving rise to the singularities.
We begin the proof:First, a representation of π1(Σ) into SU(2) gives us a representation of two pairs of pants
which are identical by the reason similar to Proposition 5.3 since the representation spaceis connected. Therefore, we can form G× T 3
2 as in SO(3)-case and introduce equivalencerelations, where the pasting maps are rotations fixing the vertices of the parametrizingtriangles and they give us pasting angles in T 3
2 . (Here, we are using triangles to denote arepresentation. The actual fixed point of c2 is actually the opposite the third vertex. Butsince everywhere, it is reversed, there are no problems.)
Here given three pasting angles in T 32 , we see that the action
(θ0, θ1, θ2)→ (2π + θ0, 2π + θ1, 2π + θ2)
is actually the same since d1 and d2 do not differ since P0, P1, P2 are all changed by−P0,−P1,−P2. Thus, we must use this Z2-action to G × T 3
2 . Actually, we work onG× (T 3
2 /Z2).

46 SUHYOUNG CHOI
First, we find a description of rep(π1(Σ), SU(2)) as a quotient space of G× T 32 /Z2: For
the open domain of triangular representations, a representation of π1(Σ) gives us uniquetriangle on S2 and hence unique pasting map. Thus, the triangular representations formGo × T 3
2 /Z2.Here, the equivalence relation is simply defined as follows, two points of G× T 3
2 /Z2 isequivalent if they induce the same SU(2)-representations. But we will go through eachcases below.
6.4. The space of abelian SU(2)-representations. We next study the faces a, b, c,and d, which correspond to abelian representations. We denote by χ2(Σ) the subspace ofabelian SU(2)-representations in rep(π1(Σ), SU(2)).
Given an abelian SU(2)-representation, h(c1), h(c2), h(d1), and h(d2) can be representedas a point in S2 with rotation angles in T 4
2 . Since we can choose the fixed point to bea common one or its antipode, there is a Z2-action on T 3
2 given by (θ1, θ2, φ1, φ2) to(4π − θ1, 4π − θ2, 4π − φ2, 4π − φ2). Thus, the space χ2(Σ) is homeomorphic to T 3
2 /Z2,where the 16 singular points are given by (±2π,±2π,±2π,±2π).
For regions, A,B,C,A′, B′, and C ′, note that fixing all three angles determines a seg-ment, a tie, which joins a point of an edge of a face to a point in the edge of anotherface.
Reinterpreting in terms of pairs of pants decomposition, we see that each abelian rep-resentation correspond to a point of ∂G×T 3
2 /Z2/ ∼ by choosing h(ci) to have fixed pointwith angles in [0, 2π].
For regions, a, b, c, and d, the circle actions are simply lifted to the circle action abovefor the SO(3)-case.
• For the face a, the equivalence relation on a × T 32 is given by (v, φ0, φ1, φ2) ∼
(v′, φ′0, φ′1, φ′2) if and only if v = v′ and two vectors (φ0, φ1, φ2) and (φ′0, φ
′1, φ′2) are
the same up to the S1-action generated by vectors parallel to (2π, 2π, 2π) normalto a.• For faces b, c, and d, the equivalence relation is defined again using the respective
S1-action generated by vectors parallel to (−2π, 2π, 2π), (2π,−2π,−2π), (2π, 2π,−2π)perpendicular to b, c, d respectively.
By a similar reasoning to Subsection 5.6, the fibers over the points of faces are 2-tori.(The only we have to double the size of every vector in the argument here): Looking ata× T 3
2 / ∼ in more detail, the equation determining the equivalence class representativesshould be φ0 +φ1 +φ2 = 0 as 4π = 0 in S1
2×S12×S1
2 with an order three translation action.We take subset of T 3
2 given by this equation. Looking at T 32 as a quotient space of the
cube [0, 4π]3, we see that the plane correspond to the union of two triangles with vertices41 = 4([4π, 0, 0], [0, 4π, 0], [0, 0, 4π]) and42 = 4([4π, 4π, 0], [4π, 0, 4π], [0, 4π, 4π]). Thentwo triangle form a 2-tori T ′ under the identifications of T 3. There is an identificationby the above S1-action which gives us an order three translation action. T ′ is isometricwith a torus in the plane quotient out by a lattice generated by translation by (4π
√2, 0)
and (2π√
2, 2π√
6). Then the order-three idenfication group is generated by a translationby (2π, 2π
√6/3). The quotient space T 2
2,a is homeomorphic to a 2-torus. Thus, the

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 47
representation space here is in one-to-one correspondence with a × T 22,a. Similarly, we
obtain T 22,b, T
22,c, and T 2
2,d for respective faces b, c, and d.
We take a union of a × T 22,a, b × T 2
2,b, c × sT 22,c, and d × T 2
2,d. Note that as we crossan edge through a tie from a face to another face, we change one of the vertex of alune triangle to its antipode. We have four faces of G × T 3
2 /Z2 glued over the edges byisomorphisms mappings like (φ0, φ1, φ2)→ (4π−φ0, φ1, φ2), (φ0, φ1, φ2)→ (φ0, 4π−φ1, φ2),and (φ0, φ1, φ2) → (φ0, φ1, 4π − φ2), which occurs if we change one of the vertex to itsantipode as we cross an edge. Therefore, the 2-tori get identified across the edges bya homeomorphisms. (Over the interiors of edges the fibers are still homeomorphic to a2-torus.) Around each vertex the gluing gives −I as the holonomy around the vertex,we have a 2-sphere with four singularities which is obtained as T 3
2 / ∼ by the Z2-actiongenerated by −I. (Here by, −I, we mean sending (x, y) to (4π − x, 4π − y), that is −Imod 4π. We will use such notations from now on.)
Hence, we can consider as a fibration over ∂G with fibers homeomorphic to T 2 exceptat vertices where the fibers are homeomorphic to a 2-sphere which is the boundary of athree-ball parameterizing SU(2)-representations factored by the free group F2 of rank 2,
Actually, we take a quotient of the first two factors T 22 of T 4
2 first, we obtain a spherewith four singularities, corresponding to the vertices of G, which is identical with ∂G ina natural way. In this way, we see naturally that χ2(Σ) is a fibered space as describedabove. We will see how χ2(Σ) imbeds in rep(π1(Σ), SU(2)) in later subsections.
6.5. The equivalence relations for SU(2)-case. We continue the proof from the above:Now, we go over the regions A, A′, B, B′, C, and C ′. We reason as follows:
Lemma 6.3. The subspace over a tie in one of the regions A, B, C, A′, B′, and C ′ butnot in I, II, III,or IV is homeomorphic to S1 × B2. If a tie is in I, II, III, or IV ,the subspace over it is identical with the subspace over I, II, III, or IV respectively andhence is homeomorphic to a 3-ball and can be considered as obtained from a Z2-action onthe solid tori.
Proof. We work similarly to Subsection 5.9. We form h(d1) and h(d2) using triangleconstructions. Here, their fixed points and angles are uniquely determined from theconstructions. The circle action exists and here we do not need to change the fixed pointsof h(d1) and h(d2) up to antipodes.
By the circle action described above, we can find a great circle S1 containing the fixedpoints w1 of h(d1) and w2 of h(d2) and the pair P of antipodal points fixed by h(ci) fori = 0, 1, 2. Since we are on a tie one of the regions A, B, C, A′, B′, and C ′ but not inI, II, III, or IV , we can decide which one of the pair of points in S3 is fixed by each ofh(ci).
First, suppose we are on B. Then h(c1) and h(c2) have a pair of respective fixed pointsantipodal to each other. Suppose h(d1) and h(d2) have the pairs of fixed points w1 andw2 distinct from this pair. Then we can parameterize such configurations by (l, θ1, θ2)where l is the length of the shortest segment s between the fixed point v1 of h(c1) to w1
and hence l ≤ π and θ1/2 is the counter-clockwise angle at v1 between s and the shortestsegment to the fixed point of w2. θ2 is the angle of rotation of h(d1) and equals twice of

48 SUHYOUNG CHOI
the angle at w1 between s and the shortest segment between the fixed points w1 and w2
if they are not antipodal. (See Figure 15.)Since the fixed point of h(d2) may lie anywhere in S2, it follows that θ1 can vary within
S12. (Thus, the generalized triangle with one vertex of angle in [2π, 4π] and the other two
angles in [0, 2π] also needs to be considered here in multiplications by geometry. )Thus, our space is [0, π]× S1
2 × [0, 2π] quotient by some equivalence relation. Here theequivalence relation, we have to consider is when θ2 = 0, 2π, i.e., when h(d1) is I or −Iand thus l is not defined well.
(l, θ1, 0) ∼ (l′, θ1, 0) and (l, θ1, 2π) ∼ (l′, θ1, 2π)
The quotient space is homeomorphic to a disk times a circle. The circle correspond tothe second factor and the disk the other two factors.
For the region B′, the reasoning is identical.For the region A, v1 is antipodal to v0. Thus, we let the fixed point of h(d1) be v1 and
the rotation angle to vary in S12. Then the distance from v1 to the fixed point of h(d2)
and the rotation angle of h(d2) gives us a parameterization [0, π]×S12× [0, 2π]. Again the
equivalence relations occur when θ2 is zero or 2π.For the region A′, the reasonings are similar.For the region C, v2 is antipodal to v0. We let the fixed point of h(d2) be v2 and
the rotation angle to vary in S2. The distance from v0 to the fixed point of h(d1) andthe rotation angle of h(d1) and the rotation angle of h(d2) gives us a parameterization[0, π]× S1
2 × [0, 2π]. The equivalence relation is given similar to above.For region C ′, the reasoning is similar.For each of regions I, II, III, and IV , we obtain 3-dimensional balls by subsection 3.2.
For regions I, II, III, and IV, the subspace of rep(π1(Σ), SU(2)) over each corresponds tothe representations factoring to a homomorphism from F2 to SU(2) by multiplying h(ci)to −h(ci) for i = 0, 1, 2 if necessary. We showed that the subspace is homeomorphic toB4 but mutually disjoint.
If a tie is in an edge region intersected with a vertex region I, II, III, or IV , then thesubspace over the tie is actually onto the subspace over the vertex region. This followssince h(ci) are identity and has no meaning and just h(d1) and h(d2) are important. Forregion B intersected with region I, from the information (l, θ1, θ2) we can construct apair of fixed points of h(c1) and h(c2) provided with are given an orientation on the greatcircle containing the fixed point of h(d1) and h(d2). Changing the orientation of the greatcircle has the effect of switching points in the pair of fixed points, which induces an action(l, θ1, θ2) → (π − l, 4π − θ1, θ2). Thus, the axis of this action is a union of two segmentsand the quotient space is a 3-ball. For a tie in B or B’ intersected with vertex regions, thereasoning is similar. (This is related to Proposition 5.11 and the analogous propositions.)
For region A intersected with the vertex region I, we can again switch v0 and v1 givingus an action (l, θ1, θ2) → (π − l, 4π − θ1, θ2). This gives a quotient space homeomorphicto B3. For region A′, the reasoning is similar.
For regions above ties in regions C,C ′ intersected with the vertex region I, we can againswitch v0 and v2. The action can be written in the same way as above.
For intersections with vertex regions II, III, or IV , we omit the obvious generalizationsof the proofs.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 49
s
1
2
2
1
1
2
h(d )! /2
h(c )! /2
h(c )
h(d )
Figure 15. Finding topology of space over regions A,A′, B,B′, C, and C ′
�
Finally, we need (see Subsection 5.15 also):
Proposition 6.4. rep(π1(Σ), SU(2)) is homeomorphic to the quotient space of G×T 32 /Z2
by the above equivalence relations over the regions above faces A, A′, B, B′, C, C ′, I, II,III, and IV .
Proof. Again there is a one-to-one map from G × T 32 /Z2/ ∼ to rep(π1(Σ), SU(2)) de-
fined by sending the configuration to the representation it produces from the generalizedmultiplication by geometry using generalized triangles.
The map is clearly onto since any representation is reached by a triangular path. (Thetriangular representation in SU(2) is defined the same way.) Thus, every representationcan be achieved by a configuration in S2.
The one-to-one property can be achieved by first considering the interior of G× T 32 /Z2
which corresponds to triangular representations. This is achieved as in SO(3)-case. Forthe boundary regions, we verified above.
As in the SO(3)-case, G × T 32 /Z2/ ∼ is compact and rep(π1(Σ), SU(2)) is Hausdorff
since SU(2) is a compact Lie group. Thus, the map is a homeomorphism.�
6.6. The proof of Theorem 6.2. We will now prove Theorem 6.2 by comparing it toCP3: First, we will realize CP3 as T 3
2 /Z2-fibration over G. Then we will remove the regularneighborhoods of the vertices. Then compare the result to the SU(2)-representation spacewith regular neighborhoods of vertex regions removed. This is accomplished by removingthe regular neighborhoods of edge regions and comparing and comparing the topologicaltypes of the edge regions.
We begin by noting that CP3 is a toric variety of a tetrahedron G. We described it asa quotient space of G×T 3
2 in Subsection 6.1. The equivalence relation is the one given by

50 SUHYOUNG CHOI
the formula same as one on G×T 32 /Z2 restricted to the faces a, b, c, and d and there are no
more. (See Proposition 6.1.) The interiors of the edges inherit two different equivalencerelations and the fibers are homeomorphic to S1 over each point of the interiors of theedges and the vertex inherit three different equivalence relations and the fiber is a pointover each vertex. We call these the vertices of CP3. (G× T 3
2 / ∼ is homeomorphic to CP3
since we just doubled the size of each directions in T 32 . )
The quotient image of the four faces regions a, b, c, and d times T 3 are four complexprojective planes, i.e., CP2 meeting transversally at six 2-spheres that fiber over the edges.Any three of the complex projective planes meet at a vertex which lie over a vertex of G.Any two of the six 2-spheres meet at a vertex also. Moreover, three of the six 2-spherewill meet at a vertex if their corresponding edges do.
Remove from CP3 the T 32 -invariant regular neighborhoods of four vertices, i.e., four
B6. Denote the resulting manifold by N where ∂N is a union of four 5-spheres. Thiscorrespond to removing regular neighborhoods of four corners of the tetrahedron, whichwe denote by D. The edges of the tetrahedron correspond to six 2-spheres meetingat four vertices. We remove T 3
2 -invariant regular neighborhoods of the six 2-spheresintersected with N , i.e., six subspaces homeomorphic to S1×I. Each regular neighborhoodis homeomorphic to S1 × B4 × I where the triviality follows since the neighborhood isorientable. And hence their boundary is homeomorphic to S1×S3× I. This correspondsto removing regular neighborhood of the six edges in D.
Denote by M the space G× T 3/Z2/ ∼. Remove T 32 -invariant regular neighborhoods of
subspaces over the regions I, II, III, and IV . Call the resulting space N ′.By Lemma 6.3, each of the quotient spaces over the strips A, A′, B, B′, C, and C ′
in N ′ are homeomorphic to S1 × B2 × I. Denote by JA, JA′ , JB, JB′ , JC , and JC′ thecorresponding spaces. Let J be their union. We note that changing the pasting anglesinduce well-defined map in N ′− J by T 3
2 which may not extend naturally onto the wholequotient space yet. By identifying G with edges and vertices removed with G with thestrips A, A′, B, B′, C, and C ′ and regions I, II, III, and IV removed, we see thatT 3
2 -fibrations are the same ones where defined.Being homeomorphic to a representation space rep(π1(Σ), SU(2)) by Proposition 6.4,
our space G × T 32 /Z2/ ∼ is an orientable manifold. Thus, N ′ is a manifold and this
neighborhood of J is homeomorphic to S1 ×B4 × I.Let N ′(J) be the nearby regular T 3
2 -invariant neighborhood of J with J removed. Letus denote the union of the above six subspaces homeomorphic to S1 × I in N by V , andlet N(V ) denote the nearby T 3-invariant neighborhood of V with V removed, which ishomeomorphic to S1 × I × (B4 − {O}). We can choose N ′(J) and N(V ) homeomorphicby choosing their basis images under the above T 3
2 -actions to be the same.Remove from N the regular T 3
2 -invariant neighborhood N(V ) of V and V and removefrom N ′ the regular T 3
2 -invariant neighborhood N ′(J) and J . Now consider the descriptionof G′ × T 3/ ∼ and N − N(V ) − V as a torus fibration with equivalence relations thatare same. (See Subsection 6.4.) By our description, it follows that N − N(V ) − V andN ′ −N ′(J)− J are homeomorphic.
(We remark that the homeomorphism preserves the parameter I. )

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 51
Note that χ2(Σ) in N ′−N ′(J)−J correspond to a′′∪ b′′∪ c′′∪d′′×T 32 / ∼ where a′′, b′′,
c′′, and d′′ are disks in the faces a, b, c, and d respectively and hence it is homeomorphicto four 2-cells times 2-tori. They correspond to subspaces of four copies of CP2 in N .
We see that N ′ is homeomorphic to the one obtained from N by removing the T 3-invariant neighborhood of the union K of six subspaces homeomorphic to S1 × I andreplacing it with a homeomorphic neighborhood of the union J of six subspaces homeo-morphic to S1 ×B2 × I.
Let B be the union of closures of the four six balls around the vertices of CP3. Let Vbe the four vertices set. Then we choose B to be a T 3-invariant neighborhood of V aswas chosen before. Thus B maps to a union of four three-balls that are neighborhoods ofthe vertices of G.
Finally, the regions over I, II, III, and IV in G × T 32 /Z2/ ∼, each of them are
homeomorphic to B3. Let L be their union. Again, we can find a neighborhood of L inG×T 3/ ∼ so that N(L) it with L removed which coincide with B−V over the points of Gwith edges removed. Since our space is a manifold, the T 3
2 -invariant regular neighborhoodof B3 is contractible and hence is homeomorphic to B6. Thus, a T 3-invariant regularneighborhood of each of the regions over I, II, III, and IV are homeomorphic to B6.
Adding these regions to N ′, we recover M . Therefore M is homeomorphic to N withfour six-balls reattached and hence M is homeomorphic to CP3.
Let us discuss about the subspaces over the fattened edges A, A′, B, B′, C, and C ′.They form solid tori times an interval as shown in Lemma 6.3 with the part above the tiebecoming a fiber homeomorphic to a solid torus. As the tie approaches one of the regionsI, II, III, and IV the solid torus at the end of the edge becomes a 3-ball by the actionof Z2 as described in the proof of Lemma 6.3. Therefore, the degenerate part is a unionof solid torus time intervals over the 1-skeleton of a tetrahedron meeting each other at a3-ball over a vertex, where the boundary of the torus fiber and 3-ball fiber here consistsof abelian representations.
Let S be one of the 5-sphere that is a boundary component of N ′. Then S ∩ (N ′ −N ′(J)− J) correspond to the disk with three closed arcs in A,A′, B,B′, C, and C ′ in theboundary removed. χ2(Σ) ∩ S ∩ (N ′ − N ′(J) − J) is a union of three imbedded copiesof T 2 × I. As we decrease N ′(J), the abelian part over the each tie in one of the edgeregions is the boundary 2-torus of the solid torus. Thus, three imbedded copies of T 2× Iwill meet on these boundary 2-tori. The two copies get identified across ties in the edgeregions by a reflection in one of the three gluing parameter coordinates. Hence, theircomposition equals −I in T 3
2 in gluing parameter coordinates before taking the quotients.The union is then homeomorphic to T 2
2 ×I by identifying the top and the bottom wherethe identification homeomorphism is −I. We call the result a twisted 3-dimensional torus.It has three solid tori attached at the regions over three among A, A′, B, B′, C, and C ′
meeting S.If we choose a parameter of St so that the corresponding image disk Dt in G converges
to one of the regions I, II, III, and IV as t → 0, then the parameter of 5-sphere Stconverges to the set above this region, i.e., a three-ball representing the homomorphismfactoring into a free group F2-representations. The parameter of the twisted torus inSt will converge to the boundary of the three-ball since the twisted torus corresponds to

52 SUHYOUNG CHOI
abelian representations which must converge to an abelian representations in the subspaceof free group representations, i.e., the boundary of the three-ball. The parameter of thethree solid tori in St converges to the three-ball since the solid torus corresponds torepresentations over the edges which must converge to a free group representations. Herethe quotient is by the action
(l, θ1, θ2) 7→ (π − l, 2π − θ1, θ2)
in the notation of the proof of Lemma 6.3. This identification of course extends to theboundary tori also, i.e., the abelian representations.
This completes the proof of Theorem 6.2.
Remark 6.5. Thus, we see that the the representations over A, A′, B, B′, C, and C ′
form a 4-dimensional CW-complex meeting in a 3-dimensional cell over the regions I, II,III, and IV . They are somewhat twisted imbedded. We can picture them as a solid torustimes interval clasping itself and two or three of them meet at the clasped 3-balls if theirregions meet.
7. The topology of the quotient space G× T 3/ ∼ or C0
In this section, we will determine the topology of the quotient space G× T 3/sim. Wewill show that it is branch-covered by CP3.
First, we discuss the group action by Z42 by considering the Klein four-group action on
the fibers and the Klein group action on G.Clearly, there is a group of order 16 action on G × T 3/Z2/ ∼ generated by IA, IB, IC
action as given by equation 20 and the Klein four-group acting on the fiber S1×S1×S1/Z2
by actions ia sending (θ0, θ1, θ2) → (θ0 + 2π, θ1 + 2π, θ2) and ib sending (θ0, θ1, θ2) →(θ0, θ1 + 2π, θ2 + 2π) and ic sending (θ0, θ1, θ2) → (θ0 + 2π, θ1, θ2 + 2π). We need to ofcourse verify that these actions preserve equivalence classes: But this follows from thefact that the actions of IA, IB, IC amount to geometric action of taking two vertex pointsby their antipodes and each of ia, ib, and ic amounts to multiplying one of the pastingmaps by −I is SU(2). Hence, they act on the equivalence class of SU(2)-representationswhose quotient is the space of SO(3)-representations in C0.
The group is a Klein four-group extended by a Klein four-group. By taking the subgroupgenerated by IAia, IBib, ICic, we see that the group is isomorphic to a product group K×Kand hence isomorphic to Z4
2.We will discuss in detail the fiber action first. Second, we consider the Klein group
action on G and the induced action. Finally, we discuss the branch locus.
7.1. The fiberwise group actions. We discuss the fiberwise Klein four-group actionsover each of the regions. In the domain over the interior of G, the action is free.
In the regions over the interiors of the faces of G, the action is free as we can see fromthe quotient formula.
Proposition 7.1. The action of {I, ia, ib, ic} on the regions over each I, II, III, andIV , is the same as the Klein group action on a tetrahedron, identical with G. That is,{I, ia, ib, ic} that acts fiberwise on regions above I, II, III, and IV as involutary rotationsabout axes parallel to the coordinate direction through (π/2, π/2, π/2).

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 53
Proof. Consider a region I. The action of ia adds 2π to the pasting angle for c0 and c1.This means taking the antipodal fixed point in S2 and changing the respective rotationangles to be 2π minus the original ones. The third coordinate is the angle of rotationabout a product, which does not change in this case. This is an involutary rotation aboutthe one of the axis. For ib and ic, the arguments are similar. By a similar considerationfor each of the regions II, III, and IV , we are done. �
Recall from Lemma 6.3 that the subspace over one of the segments determined by theangles in one of A, B, C, A′, B′, and C ′ admits the quotient space under ∼ homeomorphicto S1 ×B2.
Lemma 7.2. For the Klein four-group {I, ia, ib, ic} which acts on the subspace over oneof A, B, C, A′, B′, and C ′, the action is generated by a rotation about an axis of the solidtori and a translation along the axis. The maps are involutions.
• ia has a fixed axis in one solid tori over a tie in A and A′ where the other two iband ic have without fixed points.• ib has a fixed axis over B and B′ where the other two ia and ic have no fixed points.• ic has a fixed axis over C and C ′ where the other two ia and ib have no fixed points.• The result of the quotient of the each region by the action of {I, ia, ib, ic} is home-
omorphic to S1 ×B2, i.e., a solid torus.
Proof. Recall that the regions over A, B, C, A′, B′, and C ′ described as follows:First, we discuss the region B. By the circle action described above, we can find two
great circles S11 containing the two fixed points of h(d1) and h(d2) and S1
2 containing thepair P of antipodal points fixed by h(ci) for i = 1, 2.
Suppose that h(d1) and h(d2) have the pairs of fixed points distinct from P . Then theirfixed points f1,−f1 and f2,−f2 are on a great circle S1
1 . We suppose that this circle donot contain P .
Since we are on a particular segment in B determined by θ1, we can choose a fixedpoint v1 of h(c1) so that the angle of rotation at v1 is the one given by θ1.
We choose f1 and f2 so that they appear in the counter-clockwise direction from v1.Then we can parameterize such configurations by (l, θ1, θ2) where l is the length of one ofthe shortest segment s between the fixed points of v1 to the fixed point of f1 and hencel ≤ π and θ1/2 is the angle between the great circle containing s the shortest segment tof2. and θ2 is the angle of rotation of h(d1). (See Figure 15.) Recall that θ1 is in S1
2 and θ2
in [0, 2π]. Thus, our space is parameterized by ([0, π]× S12 × [0, 2π])/ ∼ where ∼ is given
by Lemma 6.3 when θ2 = 0, 2π.Now consider the actions by {I, ia, ib, ic}. This amounts to multiplying the pasting
angles by −I. We start with the ib-action. Again ib will act by multiplying h(d1) andh(d2) by −I. This amounts to changing the fixed point to its antipode and changingthe angles to 2π minus the original one. This is identical with sending f1 and f2 to itsantipodal points. Thus (l, θ1, θ2) is mapped to (π − l, θ1, 2π − θ2). Thus an axis of fixedpoint of ib is a circle given by l = π/2 and θ2 = π.
Furthermore, ia acts by multiplying h(d2) by −I, and (l, θ1, θ2) is mapped to (l, θ1 +π, θ2). Finally, ic acts by multiplying h(d1) by −I, and (l, θ1, θ2) is mapped to (π− l, θ1 +π, 2π − θ2). The ia and ic do not have any fixed points.

54 SUHYOUNG CHOI
The fundamental domain of the action is given by
[0, π/2]× S12 × S1/ ∼,
and an equivalence
(π/2, θ1, θ2) ∼ (π/2, 2π − θ1, θ2).
Thus, the quotient space is homeomorphic to which is homeomorphic to S1 × B2; theidentification corresponds to collapsing one torus boundary components to an annulus byan involution.
For region B′, the reasoning is very similar, and we also have that ib is a rotation aboutan axis of the solid torus of angle π and ia s a translation by π-amount. ic is a compositionof the two.
For region A, we have v0 is antipodal to v1 and v2 is on the segment between them.Thus, we can choose the fixed point f1 of h(d1) to lie on v1 and the fixed point f2 ofh(d2) of angle in [0, 2π] is on the sphere. We coordinatized by taking l to be the distancebetween v0 and f2 and θ1 to be the rotation angle of h(d1) at v1 and θ2 to be the rotationangle of h(d2) at f2. Thus, our space is [0, π] × S1
2 × [0, 2π]/ ∼. Here, Since ia sendsh(d2) to −h(d2), we have that ic(l, θ1, θ2) = (π − l, θ1, 2π − θ2). Thus, ia has an axis offixed points given by l = π/2, θ2 = π. Since ic sends h(d1) to −h(d1), ic is a translationic(l, θ1, θ2) = (l, θ1 + 2π, θ2). Again ia is a composition of the two and hence has no fixedpoint. We have a same result for the region A′.
For regions C and C ′, we have that ic is a rotation about an axis of angle π and ia is atranslation in the axis direction and ic is the composition of the two.
From the description of the actions, we see that each of the quotient spaces is homeo-morphic to a solid torus. �
Remark 7.3. For regions A and A′, the respective axes of fixed points are given byl = π/2, θ2 = π for ia, and each of ib and ic acts freely. However, when we go to one ofthe regions I, II, III, and IV , we need to identify by (l, θ1, θ2)→ (π− l, 2π− θ1, θ2). Wecan see that ib, ic becomes rotations about axes in a 3-ball, which is what we expect for theregions I, II, III, and IV . The similar statements can be made for all other regions.
Proposition 7.4. The fiberwise Klein-four group action on G × T 32 /Z2/ ∼ is described
as follows:
• The fiberwise Klein-four group action are involution given by translations in theopen domain above the interior of G and have no fixed points. So is the action onthe fibers over the faces of G.• The action of ia is a involutionary rotation about the union of two disjoint 2-sphere
S2A and S2
A′. Similarly ib is a rotation about the union of two disjoint 2-spheresS2B and S2
B′, and ic is one about the union of 2-spheres S2C and S2
C′.• The spheres S2
A, S2A′, S2
B, S2B′, S2
C, and S2C′ will be above each edge region with the
same label.• The spheres are imbedded and meets the region above I, II, III, and IV in an
axis of the corresponding action in the 3-ball.• The quotient space has an orbifold structure with singular points the images of the
above spheres which are again spheres with same incidence relations. The local

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 55
group of the singular points is Z2 in the nonvertex point and is a Klein four-groupat the vertices where any two of them meet.
Proof. For the interior part, the first item is clear.In the regions over the faces, the {I, ia, ib, ic} actions are also free: consider these actions
as translations in the tori T 32 / ∼ where ∼ is generated by vectors parallel to the normal
vectors of form (±2π,±2π,±2π) where the signs depend on which faces you are on.Consider a for now. Then ia, ib, and ic correspond to translations by (0, 2π, 2π),
(2π, 0, 2π), and (2π, 2π, 0) respectively. Then these vectors can be seen to be parallelto the plane of the quotient tori with generators (4π, 0,−4π) and (0, 4π,−4π) since wecan change the signs of translation vectors since we are working mod 4π. We see easilythat these translations are not trivial and the fiberwise Klein four-group acts freely here.(See Subsection 6.4 for details.) Similar considerations show that the fiberwise Kleinfour-group actions are free over the faces b, c and d.
Let us now go over to the regions A,B,C,A′, B′, and C ′: We construct the two sphereS2B by taking the axis circle of ib over each solid tori in B removed with the vertex regions,
as obtained from the ties. The axis will converge to an axis, a segment in the vertex 3-ball fixed by ib, by approaching the vertex region and finally will double branch cover thesegment with two singular points. Thus, we obtain a sphere by compactifying the twoends of an annulus consisting of axis by two segments.
The same construction will give us all other spheres S2B′ , S2
A,S2A′ ,S
2C , and S2
C′ .Note that the two spheres will meet if their compactifying edges will meet. Hence, the
result follows.We can assume that they are smooth and have intersections so that their tangent planes
meet only at the origin. (Thus, we can give an invariant Riemannian structure.)Now we go over the action. For ia will fix axes above A and A’. Since they fix the axis
in the vertex 3-balls as well, S2A,S
2A′ will be fixed. The action is a rotation of angle π in
the solid tori and will be identity in the complementary 2-dimensions to the sphere andthe solid tori. The similar reasoning also hold for ib and ic.
Since the quotient of the actions are always locally linear and the local groups are finite,we obtain that the quotient has an orbifold structure. Moreover, since the local quotientof an invariant ball is always homeomorphic to a ball, the quotient space is a smoothmanifold with an orbifold structure.
�
7.2. The topology.
Theorem 7.5. G × T 3/ ∼ is homeomorphic to a quotient of CP3 under the product ofthe two Klein-four-group action generated by fiberwise and axial action. The branch locusof IA, IB, IC are given as follows: six 2-spheres corresponding to the axis. There are twocopies over each axis. Over each axis, the two 2-spheres are disjoint. Any two 2-spheresover different axis meet at at unique points over the center (π/2, π/2, π/2) of G. All three2-spheres over different axis meet at the same point as above.
Proof. Let us consider IB first. Recall that a mid-tie is a tie in the middle of the strip,i.e., the half way locus along the angular parameterization. The solid tori in the edge

56 SUHYOUNG CHOI
regions are permuted or if the edge regions are marked by B or B′, then IB acts on it andin particular IB acts on the solid tori over the mid tie.IB acts on triangles by sending v1 to −v1 and v2 to −v2 and fixing v0. Also, the pasting
angles behave (θ0, θ1, θ2) 7→ (θ0, 4π − θ1, 4π − θ2), which means h(d1) and h(d2) bothhave to be multiplied by −I and w1, w2 → −w1,−w2. Thus, the solid torus coordinateintroduced above the mid-tie in B or B’ behave (l, θ1, θ2) → (l, 4π − θ1, 2πθ2). Hence,the two fixed segments are given by equations θ1 = 0, 2π and θ2 = π (as θ2 ∈ [0, 2π] aninterval).
On the 3-torus over the fixed axis in the interior of G, the pasting maps are also sentthe same way. Thus (θ0, θ1, θ2) is sent to (θ0, 4π − θ1, 4π − θ2), and there are four fixedaxes given by θ1 = 0, 2π, θ2 = 0, 2π, which are four circles. By the Z2 action, there areactually only two circles of fixed axes over these points.
Thus, the union of entire fixed axes over the axis of IB in G correspond to a union oftwo annuli compactified by segments to form two 2-spheres.
The action of IB in M permutes the four six-balls which are regular neighborhoods ofthe subspaces corresponding to the regions I, II, III, and IV In CP3, this is true withfour six-balls described in the above proof. Thus, the action of IB on CP3 is conjugate tothat on M by our identification above. Therefore, IB is an involution with a fixed pointa union of two disjoint 2-sphere.
Similarly, we can say about IA and IC . The corresponding spheres meet at a 3-torusover at the center (π/2, π/2, π/2) of G. Since they meet the 3-torus in orthogonal circles,we see that they meet at unique points.
�
Remark 7.6. Thus, we see that the final orbifold structure of C0 is simply given byCP3 with six 2-spheres denoted by sA, s
′A, sB, s
′B, sC, and s′C corresponding to involutions
IA, IB, and IC and the six 2-spheres S2B, S2
B′, S2A,S
2A′ ,S
2C, and S2
C′ in G × T 32 / ∼ which
are branched locus of {I, ia, ib, ic}-actions. Denote the spheres by SA, S′A, SB, S
′B, SC , and
S ′C respectively.The three spheres sA, s
′A, sB, s
′B, sC , and s′C all meet at a point in the “middle” region
of the tetrahedron. SA, S′A, SB, S
′B, SC , and S ′C also meet at a point in the “vertex” region.
We see that sA and SA meet at a point in the middle of an “edge” region. and sB andSB do and so do sC and SC. Also, we can insert primes any where to get the incidences.There are no other incidence type.
We can now describe the orbifold structure on C0. The twelve spheres have order twosingularities everywhere. There are two points with local group Z3
2 and there are three withlocal group Z2
2.
8. The other component
In this section, we study the other component C1. We follow the basic strategy as inC0 case. First, we introduce an octahedron O and its blown-up compactification O toparameterize the representations. This octahedron characterize the holonomy of the twopairs of pants above and below. Again, we compactify the octahedron by blowing upvertices into squares to prepare for the study of the representations of the fundamentalgroup of the surface itself. Then we introduce equivalence relation so that O × T 3/ ∼

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 57
becomes homeomorphic to C1. In the next sections, we will show that the quotient spaceis homeomorphic to an octahedral manifold.
8.1. The spherical triangle region for the representations. We will now discuss theother component, i.e., the component containing a representation h∗ which correspond toone with an upper and lower triangle a standard lune with vertices [1, 0, 0] and [−1, 0, 0]and two edges passing through [0, 1, 0] and [0, 0, 1] where v0 = v′0 = [1, 0, 0], v1 = v′1 =[−1, 0, 0] and v2 = v′2 = [0, 1, 0] and pasting maps P0 and P2 identity and P1 the rotationof angle π about [0, 1, 0] sending v1 to −v′1.
Lemma 8.1. The subset of triangular representations in C1 is a dense open subset. Anyrepresentation whose associated triangles are degenerate can be pushed to a triangular onesby a path of deformations. Every representation in the component C1 is associated withgeneralized triangles (40,41) whose associated angles are (θ0, θ1, θ2) and (θ0, π − θ1, θ2).
Proof. Certainly h∗ satisfies this condition. We will show that so do sufficiently nearbyrepresentations.
Choose a near one that is triangular and hence it is represented by two generalizedtriangles (40,41) with the angles (π/2, π/2, π− ε) and (π/2, π/2, π− ε) respectively. Letus put them into standard positions. At each vertex, the isometry associated with areholonomies of one of the cis. Thus, a pasting map must send the corresponding vertexto a vertex, say v, in the other triangle or to the antipodal point −v. Use the pastingmaps P0 and P2 identity and P1 a rotation at [0, 1, 0] sending v1 to −v′1. The associatedrepresentation h1 is clearly near h∗.
For some real numbers δ, δ′, and δ′′ with |δ|, |δ′|, |δ′′| << ε, we can form two sphericaltriangles with respective angles angle (π/2+δ, π/2−δ′, π−ε+δ′′) and (π/2+δ, π+δ′, π−ε+ δ′′). Put these triangles in standard positions with P0 fixing v0 and the correspondingP1 sending v1 to −v′1 and P2 sending v2 to v′2. If the pasting angles are different, therepresentation is different. One can form a near triangular representation h′ to h1 withtriangles of angle (π/2+δ, π/2−δ′, π− ε+δ′′) and (π/2+δ, π+δ′, π− ε+δ′′) respectively.Therefore, we obtain six parameters of representations near h1 which are all different.
Therefore, the subset of triangular representation is not empty in C1. Moreover, thefunction fi : C1 → R given by [h] 7→ trh(ci) for each i = 0, 1, 2 is not constant. Therefore,we see that the subset defined by fi = 3 is an algebraic subset whose complement is denseand is locally path-connected. Thus, any representation can be pushed to a triangularrepresentation by a real analytic arc which are all in triangular part except at the end.This proves the first part.
The set of triangular representations with the angle conditions form an open subset ofC1 since any nearby triangular representation should have uniquely defined triangles upto isometry and uniquely pasting maps nearby. These data should be near the originalones near h1 and moreover, the angles satisfy the desired relations since v1 is sent to −v′1and v0 to v′0 and v2 to v′2 (The reason is similar to Remark 5.5.)
This argument also show that the angle relation condition of this lemma is an opencondition in the set of triangular representations. Clearly, the angle relation condition isa closed one also. Thus, all triangular representations satisfy the condition. As these aredense, this completes the proof of the second part.

58 SUHYOUNG CHOI
�
We can characterize the representations in C1 to be ones where a triangular represen-tation gives two triangles where the pasting maps send a vertex vi of the first triangle41 to the corresponding vertex v′i of the second triangle 42 or to the antipode −v′i ofthe vertex of the second triangle so that the antipodal pasting map always exists for anychoice of the triangles up to the action of the Klein four-groups.
For our convention, the pasting map P0 sends v0 to v′0, P1 sends v1 to −v′1 and P2 sendsv2 to v′2. Note we do not have a canonical choices for Pi which we need to get a coordinatesystem as of yet. We will choose canonical choices shortly.
The set of possible nondegenerate triangles for 40 and 41 is then described as theintersection of Go ∩ κ(G0) where κ is the map sending (θ0, θ1, θ2) to (θ0, π− θ1, θ2). SinceG0 is given by
θ0 + θ1 + θ2 > π
θ0 < θ1 + θ2 − π,θ1 < θ2 + θ0 − πθ2 < θ0 + θ1 − π(26)
it follows that our domain is an octahedron O given by eight equations
θ0 + θ1 + θ2 > π
θ0 + θ2 > θ1
θ0 < θ1 + θ2 − π,θ0 + θ1 < θ2
θ1 < θ2 + θ0 − π2π < θ0 + θ1 + θ2
θ2 < θ0 + θ1 − πθ1 + θ2 < θ0(27)
For a representation h in C1, 40 and 41 are in the octahedron and they are related byκ.
8.2. The compactification O. We compactify O into O: We map O into G × G bysending 40 to (40,41) by a map (I, κ) where 41 is the associated triangle with anglesobtained by κ. Since geodesic rays G0 corresponds to points of the boundary of G, wesee that O compactifies in G so that each vertex gets expanded to a quadrilateral: A rayin O gives us a ray in G and a ray in κ(G). Therefore, a sequence of upper triangles andthe lower triangles in a given ray may converge to a different generalized triangles. Recallthat a ray a in Go ending at the interior of an edge has a limit in a segment times the edgein G. That is, a point is expanded to a segment. Considering a ray a and κ(a), we seethat at each vertex of O, rays can converge to any point in an interval times an intervalwhere the upper triangles and lower triangles converges respectively coordinate-wise. (Seethe proof of Proposition 1.2.) Thus O compactifies to an expanded octahedron, i.e., anoctahedron where each vertex is expanded to a square.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 59
(0, !/2, !/2)
(!/2, 0, !/2)
A
C
C’
A’ B’
B
C
C’
B’A’
A(!/2, !/2, !)B
a
c’
b’
d
a’
d’
c
b
(!, !/2, !/2)
(!/2, !, !/2)
(!/2, !/2, 0)
Figure 16. The faces of O drawn topologically and on a plane using stere-ographic projection.
Again the compactification is given by taking the closure of the image of the map(θ0, θ1, θ2, l0, l1, l2). We denote the result by O:
We see that O can be imbedded as a truncation of the closure of O: For the vertex[π, π, π], there is a side S of Cl(O) facing it. We take a plane P parallel to S of distanceε > 0 for sufficiently small ε passing through O. We truncated Cl(O) by P . We do thesame for other vertices as well.
The Klein four-group {I, IA, IB, IC} acts on the resulting polyhedron as isometric ac-tions. Of course, we need to verify these extensions but are analogously proven to G case.See Figure 16 to see the topological actions.
We label regions by first what region in G it is from and second what region in κ(G)it is from. For faces, from G, we will simply denote it by a, b, c, or d according to whereit came from. For faces from κ(G), we denote it by a′, b′, c′, or d′ according to where itcame from among a, b, c, or d respectively. Of course, here the orderings in labels areimportant. In the equation 27, the equations correspond to a, a′, c, c′, b, b′, d, and d′
respectively.We describe the faces briefly. The parameters of each quadrilateral is given by tie
parameters in G and ι(G) since the rectangles are really a product of the two middle ties.
(AA) This region is a quadrilateral. The top triangle of a point over this region is alune with v0 and v1 vertices of angle π/2 and v2 is on the segment between v0 andv1. The bottom triangle is a lune with vertices v0 and v1 = −v0 and v2 on thesegment between v0 and v2. A point in corresponds to two generalized triangles(40, κ(40)). The functions l1 the length of the edge between v0 and v2 and l2

60 SUHYOUNG CHOI
the length of the edge between v′0 and v′2 parameterize the square with values in[0, π]× [0, π]. Here the lune and the map above for h∗ correspond to the center ofthe square as the corresponding bottom element is a segment of length π/2.
(A′A′) The upper triangle is a segment with one endpoint v0 = v1 both of angle π/2 andv2 the other endpoint. The lower triangle is a segment with one endpoint v0 = v1
both of angle π/2 and v2 the other endpoint.(BB) This region is again a quadrilateral. The top triangle is a lune with vertices v1
and v2 antipodal to each other and v0 is on an edge. The bottom one is a lune ofsame type.
(B′B′) This is again a quadrilateral and the top and the bottom triangles are segmentswith vertices v1 = v2 and v0.
(CC′) This is again a quadrilateral and the top triangle is a lune with vertices v0 andv2 antipodal to each other. The bottom triangle is a segment with an endpointv0 = v1 and the other endpoint v1.
(C ′C) This is again a quadrilateral and the top triangle and the bottom one are reversedones for CC′ .
(b) This region is a hexagon. A point correspond to a representation where the toptriangle is a pointed lune and v0 = v2 and v1 is antipodal to them. The bottomis a nondegenerate triangle except when we are at the boundary of b. The bound-ary consists of segments in (AA),(BB),(CC′),and in b′, a′, d. This means that thebottom triangles are as in (AA),(B′B),(CC′),and b′, a′, d respectively.
(c) The region is a hexagon. Again analogous statements to (b) hold.(d) The region is a hexagon. Again analogous statements to (b) hold.(a) The region is a hexagon. Analogous statements to (b) hold.
(a′, b′, c′, d′) These are hexagons and the additional edges are among AA, B′B, and CC′ . Thetriangles of the points are easily learned from from a, b, c, and d respectively.
The regions from the faces of O are said to be faces still, and the regions from thevertices of O are said to be square regions. Notice that edges are not blown-up here.
Note that IA acts onAA andA′A′ but does not act on other rectangular regions. SimilarlyIB acts on BB and B′B′ but does not act on other regions and IC acts on CC′ and C ′C butdoes not act on other regions. Finally, IA sends faces b to c and b′ to c′ and a to d anda′ to d′ and vice versa. IB sends faces a to c and a′ to c′ and b to d and b′ to d′ and viceversa. IC sends faces c to d and a′ to d′ and a to b and c′ to d′ and vice versa. The pastingangles are sent as in C0 cases. One can verify this using a straightforward process.
8.3. Equivalence relations on O. We will now introduce equivalence relations on O×T 3
so that the result is homeomorphic to the other component C1.First we define a continuous map T : O × T 3 → C1: We are given two triangles
(40,41) and three pasting angles, we define a representation. Put 40 and 41 intostandard positions in H as defined above. That is, v0 = [1, 0, 0] and v1 on the closure ofthe component L of ∂H − {[1, 0, 0], [−1, 0, 0]} containing [0, 0, 1] and v2 ∈ H.
Let v0, v1, and v2 be the vertices of 40 and v′0, v′1, and v′2 be those of 41. Let (θ0, θ1, θ2)
denote the angles of 40.We always have v0 = [1, 0, 0] and v1 ∈ L. Thus, given a pasting angle (φ0, φ1, φ2), we
define the pasting map P0 to be Rv0,φ0 . Given φ1, we define the pasting map P1 sending

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 61
v1 to −v′1 to be the
R−v′1,φ1◦R[0,1,0],d(v1,−v′1) = R[0,1,0],d(v1,−v′1) ◦Rv1,φ1 .
Denote by L0 the segment in H with endpoints [1, 0, 0] and [−1, 0, 0] that has angle θ0
with L at v0 = [1, 0, 0]. Let S10 be the great circle containing L0.
If at least one of them is nondegenerate, then one of v2 and v′2 is in Ho and hence v2
and v′2 are not antipodal, and hence there exists a unique isometry R sending v2 to v′2preserving the great circle through v2 and v′2 if v2 6= v′2. If v2 = v′2 we let R be the identity.We define P2 = Rv′2,φ2
◦R = R ◦Rv2,φ2 . Since v2 and v′2 lie on L0, R acts on S10.
Suppose that both triangles are degenerate, and they are on one of the interiors of thesix squares.
Suppose that (40,41)) is in the square AA. Put the two triangles into standardposition. They are both lunes with vertices on a segment L0. Then R must act on S1
0.Therefore, we define P0, P1, P2 as in the two paragraph ago.
If (40,41) is in the square A′A′ , we do similarly to AA. Suppose that (40,41) is inthe square BB. In this case, v0 has a π-angle and v1 is in L and v2 is in −l. P0 and P1 aredefined as above. For P2, we use the rotation acting on ∂H as prescribed two paragraphsago. For all other cases, we can define P0, P1, P2 similarly.
For case B′B′ , the arguments are similar.For case CC′ , 40 is a lune with vertices v0 = [1, 0, 0] and v2 = −v0 and v1 is in L. We
have that κ(40) is a segment with an endpoint v′0 = v′2 = [1, 0, 0] and v′1 is in L. ThenP0, P1 are defined as above. For P2, we use the composition of R[0, 0, 1] preserving thegreat circle S1
0 with a rotation at v2 = [−1, 0, 0]. For C ′C , the definitions are similar.
The continuous dependence of P0 and P1 on O×T 3 are clear, and that of P2 in O×T 3
other then the square regions is clear also. The continuous dependence of P2 at regionsover AA, A′A′ , BB, B′B′ , CC′ , and C ′C follows from the fact that the used isometries dependcontinuously on S1
0, and hence on θ0, and v2 and v′2 and, thus, on the all of the coordinatesof O × T 3.
Since h∗ is represented by two triangles with vertices [1, 0, 0], [0, 1, 0], and [0, 0, 1] whereφ0, φ1, and φ2 are all zero, it follows that our map T is into C1. Since triangular repre-sentations are dense, and our map is onto the triangular part, T is onto C1.
Proposition 8.2. Using pasting map construction as above, we have an onto map
T : O × T 3 → C1.
We aim to introduce an equivalence relation on O × T 3 so that the induced map isone-to-one onto.
As a partial converse, we have
Proposition 8.3. Suppose we are given representations h, h′ ∈ C1. Let
(θ0, θ1, θ2, φ0, φ1, φ2) and (θ′0, θ′1, θ′2, φ′0, φ′1, φ′2)
be the associated angles for h and h′ respectively.
• If either θi 6= 0, π, then the corresponding vertex vi fixed by h(ci) is determined upto antipodes.

62 SUHYOUNG CHOI
• If
(θ0, θ1, θ2, φ0, φ1, φ2) 6= (θ′0, θ′1, θ′2, φ′0, φ′1, φ′2)
up to the action of K and h and h′ are both triangular, then h and h′ are notconjugate. Thus, for triangular representations, the angle coordinates are uniquelydetermined.
Proof. Obvious. �
8.3.1. The equivalence relations on faces a, b, c, d, a′, b′, c′, and d′. There are equivalencerelations on the faces a, b, c, d, a′, b′, c′, and d′. We will consider a first. Then here the toptriangle is a pointed point and the bottom triangle a nondegenerate triangle.
The equivalence relation is given by the fact that a representation of a pair of pantscorresponding to a pointed point has a centralizer isomorphic to a circle. Thus P0, P1, P2
are determined only up to a right multiplication by an isometry fixing the point. Thischanges the pasting angles to be added by the same angle. This changes Pi to Pi ◦R[1,0,0],θ
as the pointed point is at [1, 0, 0] in the standard position. We rewrite it as Pi ◦R[1,0,0],θ ◦P−1i ◦Pi. The first three terms gives us a rotation of angle θ at Pi([1, 0, 0]). This changes
the rotation angles by θ, and gives us an S1-action given by sending
(φ0, φ1, φ2) 7→ (φ0 + θ, φ1 + θ, φ2 + θ) for θ ∈ S1.
(This section is similar to Subsection 5.6.)So the equation determining the equivalence class representatives should be φ0 + φ1 +
φ2 = 0 as 2π = 0 in S1 × S1 × S1 with an order three translation action. We takesubset of T 3 given by this equation. Looking at T 3 as a quotient space of the cube[0, 2π]3, we see that the plane correspond to the union of two triangles with vertices41 = 4([2π, 0, 0], [0, 2π, 0], [0, 0, 2π]) and42 = 4([2π, 2π, 0], [2π, 0, 2π], [0, 2π, 2π]). Thentwo triangles form a 2-tori T ′ under the identifications of T 3. There is an identificationby the above S1-action. T ′ is isometric with a torus in the plane quotient out by a latticegenerated by translation by (2π
√2, 0) and (π
√2, π√
6). Then the idenfication group isgenerated by a translation by (π, π
√6/3). This is of order three. The quotient space is
homeomorphic to a 2-torus, which we denote by T 2a,2. Thus, the representation space here
is in one-to-one correspondence with ao×T 2a,2. There are no more equivalences here since
the lower triangle is nondegenerate.Furthermore, the S1-action extends to a× T 3 and still gives equivalent pastings.For regions b, c, and d, these are all equivalent to a by the the actions of the group
generated by IA, IB, IC . Thus, similar conclusions hold.
(b) The S1-action
(φ0, φ1, φ2) 7→ (φ0 + θ, φ1 − θ, φ2 + θ) for θ ∈ S1.
The equation for the equivalence class representatives is φ0 − φ1 + φ2 = 0.(c) The S1-action
(φ0, φ1, φ2) 7→ (φ0 − θ, φ1 + θ, φ2 + θ) for θ ∈ S1.
The equation for the equivalence class representatives is −φ0 + φ1 + φ2 = 0.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 63
(d) The S1-action
(φ0, φ1, φ2) 7→ (φ0 + θ, φ1 + θ, φ2 − θ) for θ ∈ S1.
The equation for the equivalence class representatives is φ0 + φ1 − φ2 = 0.
There are again the order 3 translation group actions giving us 2-tori as quotients in eachcases. Here the ± of ±θ corresponds to the action of S1 on the pasting angles. TheseS1-actions all extend to the boundary where they all give equivalent pastings.
The upper and lower triangle is related by the relation in O:
(θ0, θ1, θ2)↔ (θ0, π − θ1, θ2).
For regions a′, b′, c′, and d′, these are related to a, b, c, and d by switching the uppertriangle with the lower ones and taking inverses of P0, P1, P2.
(a′) Here the upper triangle is nondegenerate in the interior of a′ and the lower one isa pointed point, say v. P1 maps v1 to the antipodal point of v and P0, P2 sendsv0, v2 to v. By reasoning like the case a, we obtain that S1-action fixing v, givesus an S1-action
(φ0, φ1, φ2) 7→ (φ0 + θ, φ1 − θ, φ2 + θ) for θ ∈ S1.
The equation for the equivalence class representatives is φ0 − φ1 + φ2 = 0(b′) By a similar reason to above, The S1-action is given by
(φ0, φ1, φ2) 7→ (φ0 + θ, φ1 + θ, φ2 + θ) for θ ∈ S1.
The equation for the equivalence class representatives is φ0 + φ1 + φ2 = 0(c′) The S1-action is given by
(φ0, φ1, φ2) 7→ (φ0 − θ, φ1 − θ, φ2 + θ) for θ ∈ S1.
The equation for the equivalence class representatives is −φ0 − φ1 + φ2 = 0(d′) The S1-action is given by
(φ0, φ1, φ2) 7→ (φ0 + θ, φ1 − θ, φ2 − θ) for θ ∈ S1.
The equation for the equivalence class representatives is −φ0 − φ1 − φ2 = 0.
Again, there are order-3 translation group actions in each cases giving us 2-tori as quo-tients.
The S1-actions can be described as orthogonal direction one to the faces and the rep-resentative equations are tangent directions to the faces. Also, IA, IB, IC send permutesS1-actions and the representative directions equations.
8.3.2. Equivalence relation over the edges. Also, when two faces meets S1-actions fromthe two faces are different ones and they generate T 2-action which gives equivalent pointsover the edges. This will be the equivalence relation we will consider. Here we obtain as acircles over the interiors of edges. Hence, they form annuli over the interiors of the edges.

64 SUHYOUNG CHOI
1
[0,1,0]
V’ V’01
!/2
!/2
""
0
1
1
u
S
u
!#
VV V’
V 0
01
2 2
Figure 17. How to find a fixed point of h(d1) for region AA.
8.3.3. The equivalence relations on faces AA,A′A′,BB, B′B′ , CC′ , C
′C. We will introduce equiv-
alences over the six regions, AA,A′A′ ,BB, B′B′ , CC′ , C
′C . The equivalence relation is simply
the identification of ones producing the same representations. We show that each is home-omorphic to S3 and its tubular neighborhood is homeomorphic to S3×B3. Also, we showthat there is a branched double-cover by S3 and S3 ×B3 which extend.
First, we go to square AA. Here the top triangle is a lune with vertices v0 and v1 andv2 on a segment. The bottom triangle is a lune with vertices v′0 and v′1 = −v′0 and v′2 onan edge of the lune. These are put into standard positions.
We note that d1 = P−10 P1 and d2 = P−1
0 P2. We will find preferred fixed points of d1
and d2 respectively on S2.First P0 is a rotation R([1, 0, 0], θ0).And P1 is a composition of rotation of angle θ1 at [−1, 0, 0] with R([0, 1, 0], π). (Recall
we are allowed to change the order of composition here.) Thus, P1 sends [1, 0, 0] to[−1, 0, 0] and has −1 as an eigenvalue. This means that there is a fixed point u determinedup to antipodes and an invariant great circle S1 containing [±1, 0, 0]. A fixed point is givenas a vertex of a triangle with vertex [0, 1, 0] and [−1, 0, 0] with respective angles π/2 andθ1/2 respectively. We let u be this vertex which lie on the great circle S1
0 passing through[0, 1, 0] and perpendicular to S1.
To obtain the fixed point of d1, we draw a triangle with vertex u and [1, 0, 0] withrespective angles π/2 and π − θ0/2. The third vertex u1 of this triangle is a fixed pointof d1. Again u1 is on S1
0. The rotation angles is π clearly as the angle of the this vertexis π/2. Also, u1 is the intersection point of S1
0 and the segment with vertices [1, 0, 0] and[−1, 0, 0] having angle π − θ0/2− θ1/2 with the segment connecting [1, 0, 0] with [0, 1, 0].Thus, u1 could be any point on S1
0. (See Figure 17.) From construction, the rotationangle of h(d1) is π always.
[1, 0, 0] and u1 will give us a coordinate system κu1 on S2 so that [1, 0, 0] has coordinates[1, 0, 0] and u1 the coordinate [0, 1, 0].

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 65
A coordinate expression of d2 with a distinguished fixed point correspond to a point ofS3. The coordinate of d2 under the coordinate system κu1 gives us a map from AA×T 3 →S3. This map depends on the choice of the fixed point u1,−u1 for h(d1) and the choiceof the fixed point of h(d2) as well. This generates a Klein four-group K action on S3.Therefore, we obtain a map AA × T 3 → S3/K.
Consider S3 as a double cover of SO(3), i.e., as a ball of radius 2π in R3 with the outersphere identified to a point.
By an easy topological argument, K acts by the action S on S3 induced by a rotationof angle π at [1, 0, 0], that is sending an isometry to the isometry of same rotation anglebut with the fixed point changed by the rotation of angle π and by the antipodal map Ton S3. Then the set of fixed points of S is the circle through the origin and consisting ofall rotations with fixed points [1, 0, 0] and [−1, 0, 0]. The set of fixed points of T is empty.The set of fixed points of S ◦T is given by isometries with fixed points at the circle though[0, 1, 0] and [0, 0, 1] of rotation angle π.
Remark 8.4. Here, it is useful to see S3 as a unit sphere in R4. Then S is representedas a diagonal matrix with entries 1,−1,−1, 1 and T equals −I and ST is a diagonalmatrix with entries −1, 1, 1,−1. Thus, the set of fixed points of S is given by the xt-planeintersected with S3 and the set of fixed points of T is given by the yz-plane intersectedwith S3. Hence, the set of branch locus is a link consisting of two trivial knots with onecrossing point under a projection.
We easily see that the resulting space S3/K is homeomorphic to S3. The quotient mapS3 → S3/K is a branched cover over a link of two trivially knotted circles with linkingnumber 1.
Hence, we obtain a map
AA × T 3/Z2 → S3/K ∼= S3.
This map is seen to be surjective. We omit proof which follows from the geometricconstructions above; essentially, any element of SO(3) can arise as h(d2). (See the proofof Theorem 9.1 also.)
For the region A′A′ × T 3, we can do the similar argument: Hence, we obtain a map
A′A′ × T 3 → S3/K ∼= S3.
This map is seen to be surjective.We discuss BB. Here the top triangle is a lune with vertices v1 and v2 with v0 on a
segment. The vertex angle is π/2. The bottom triangle is a lune with an endpoint v′1 andv′2 = −v′2 and v′0 in the segment.
Put them in the standard positions, and we obtain that v0 = v′0 = [1, 0, 0] and v1 andv′1 are on the lower segment l of the boundary of the hemisphere H and v2 and v′2 on theupper segment of the boundary of the hemisphere H.
We change generators so that we use c0 and c2 for generators and d′1 = P−11 P0 and
d′2 = P−11 P2. Then d′1 = d−1
1 and d′2 = d−11 d2. (This is a change of index sending (0, 1, 2)
to (1, 0, 2). )Thus, the situation again reduces to the case AA × T 3.

66 SUHYOUNG CHOI
For the region B′B′ × T 3, we can do the similar argument: Hence, we obtain a map
B′B′ × T 3 → S3/K ∼= S3.
This map is seen to be surjective.Next, we go to the region CC′ . Here v0 is antipodal to v2 and v0 and v2 are the vertices
of a lune, and v1 is on the segment of the lune. The lower triangle is a segment withvertices v′0 = v′2 and v′1.
In this case, P2 sends v2 to v′2 = −v2 which is a composition of rotation of angle π at[0, 0, 1]. Then h(d2) has a fixed point in the great circle S1
1 containing [0, 1, 0] and [0, 0, 1]by an argument similar to AA case. h(d1) can be any isometry.
CC′ × T 3 → S3/K ∼= S3,
which is surjective also.Thus, we obtained the desired conclusions. The same can be said for the region C ′C .We define the equivalence relation over the faces AA,A′A′ ,BB, B′B′ , CC′ , C
′C so that the
above maps are injective. Also, we use IA, IB, IC actions to identify representations.
Theorem 8.5. The map T : O × T 3 → C1 induces a homeomorphism O × T 3/ ∼→ C1.
Proof. We showed that T is onto. Let us show T is one-to-one. The interior O × T 3 isinjects into triangular representations since triangular representations uniquely determinethe triangles up to isometry and the choices of fixed points up to antipodal pairs androtation angles are also determined by the standard positions.
The map from the boundary of O with vertex rectangles removed is also injective. Weuse the facts about h(ci), which are not I or −I here, to show this. The map from theregions above the square regions are injective as shown above. The injectivity of the totalmap follows from this result.
Since SO(3) is compact, the quotient space rep(π1(Σ1), SO(3)) is Hausdorff. SinceO × T 3/ ∼ is compact and C1 is Hausdorff, we have a homeomorphism.
�
9. SU(2)-pseudo-representations for the above component
We define the SU(2)-representation space rep−I(π1(Σ1), SU(2)) of a punctured genus2 surface Σ1 with the puncture holonomy −I as the quotient space of the subspace ofHom(π1(Σ1), SU(2)) where h(∂P ) = −I by conjugations. This space is a manifold byProposition 3.7 and the modified Proposition 1.2 of [10], where the relation is modifiedto equal −I.
Let T 32 be the product of three copies of S1
2. Let Z2 act on it as before and we obtain,T 3
2 /Z2.We will show that this space branch covers C1 in a 16 to 1 manner.
Theorem 9.1. rep−I(π1(Σ1), SU(2)) is homeomorphic to the filled octahedral manifold.
Proof. As before, we need to show that rep−I(π1(Σ1), SU(2)) is homeomorphic to a quo-
tient space of O×T 3/Z2. Then we need to show that the quotient space is diffeomorphicto the desired space.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 67
Realize P as a union of two pair of pants S0 and S1 and a punctured annulus A insertedin place of c1. Thus, the angles for c1 in S0 and c′1 in S1 is related by θ to 2π − θ.
We define a triangular part D2 of rep−I(π1(Σ1), SU(2)) as one corresponding to therestrictions to π1(S0) and π1(S1) are both triangular representations to SU(2), i.e., rep-resented by a nondegenerate spherical triangle. Using the trace functions for ci, we showthat D2 is an dense open set with complements a union of algebraic subsets.
Therefore, the triangular subset D1 of C1 can be represented by Oo × T 32 /Z2. The last
Z2 action comes from the same fact as in C0 case. More precisely, there is a 16 to 1 mapfrom Oo × T 3
2 /Z2 to D1.Since an open dense subset of rep−I(π1(Σ1), SU(2)) branch-covers D1 in 16 to 1 manner,
it follows that we can lift Oo×T 32 /Z2 into the dense open set D2 in rep−I(π1(Σ1), SU(2)).
The lift is injective since in Oo the two triangles are not degenerate and hence the isometryclasses of the two triangles and the pasting angles are uniquely determined.
By a geometric limit argument, we see that each representation in rep−I(π1(Σ1), SU(2))induces a representation where two pairs of pants are represented as two triangles (gen-eralized) related by the angle conditions. Conversely, such a pair correspond to a repre-sentation of π1(Σ1) to SU(2). Therefore, we have a surjective map from O × T 3/Z2 torep−I(π1(Σ1), SU(2)). (Note that as before, we are using triangles, not the fixed pointthemselves, to represent these.)
Now we introduce equivalence relation ∼ on this space, which does not include onesgiven by IA, IB, IC .
We will use the same equivalence relation on regions above a, b, c, d, a′, b′, c′, and d′ asin SO(3)-case except that now the fibers are T 3
2 /Z2. The equivalence relation is given byidentifying all elements proportional to (2π, 2π, 2π)-vector in T 3
2 to O for face a× T 32 , by
identifying all elements proportional to (2π,−2π, 2π)-vector in T 32 to O for face a′ × T 3
2 ,and so on. (See 8.3.1 for more details.)
To see more details, let us look at the region above the interior of a: So the equationdetermining the equivalence class representatives should be φ0 +φ1 +φ2 = 0 as 2π = 0 inS1 × S1 × S1 with an order three translation action. (Z2-action here is trivial because ofthe equivalence relation making all vectors parallel to (2π, 2π, 2π) equivalent to (0, 0, 0).)We take subset of T 3
2 given by this equation. Looking at T 32 as a quotient space of the
cube [0, 4π]3, we see that the plane correspond to the union of two triangles with vertices41 = 4([4π, 0, 0], [0, 4π, 0], [0, 0, 4π]) and42 = 4([4π, 4π, 0], [4π, 0, 4π], [0, 4π, 4π]). Thentwo triangle form a 2-tori T ′ under the identifications of T 3. There is an identificationby the S1-action. T ′ is isometric with a torus in the plane quotient out by a latticegenerated by translation by (4π
√2, 0) and (2π
√2, 2π
√6). Then the idenfication group
is generated by a translation by (2π, 2π√
6/3). This is of order three. The quotientspace is homeomorphic to a 2-torus. Thus, the representation space here is in one-to-onecorrespondence with ao×T 2. There are no more equivalences here since the lower triangleis nondegenerate.
For all other faces, the similar consideration gives us that over the interior of a face,there is a 2-torus fibration.
Now, O × T 32 /Z2/ ∼ with the same equivalence relation as induced by faces extended
to edges and vertices is the octahedral variety: This follows since this is O×R3 quotient

68 SUHYOUNG CHOI
by the lattice generated by (4π, 0, 0), (0, 4π, 0), (0, 0, 4π), (2π, 2π, 2π) which has generators(±2π,±2π,±2π). By this description, we see that the quotient space is homeomorphicto the octahedral variety. (See the page 50 in Fulton [12]).
This space is actually described as follows. CP3 is a toric variety over a tetrahedron.Then there are six spheres mapping to six edges of the tetrahedron. We blow-up each ofthe four vertices to a two sphere and now the six spheres do not meet. Now blow-downeach of the four spheres to a point. Then remove the six points, we obtain a manifold V .(See page 50, Section 2.6, of Fulton [12].)
If we remove the union of contractible cone-neighborhoods of the six points, then theremaining is a manifold so that the closure in V is compact and has boundary a union ofsix 5-manifolds homeomorphic to S2 × S3.
For regions, AA,BB, CC′ ,A′A′ , B
′B′ , and C ′C , we will use a different but similar identifi-
cation to SO(3)-case. Let us take the case AA. Here the pasting angles are in S12 . By
extended multiplication by geometry for SU(2), we obtain u1 and u2 uniquely determinedin this case. Therefore, by reading the coordinates of u2 in terms of u1, we obtain a mapAA×T 3
2 → C1 whose image is an imbedded 3-sphere since given all points of S2 arise as apoint and all rotation angles occur. Thus, this discussion precisely identifies this 3-spherewith the 3-sphere in Subsubsection 8.3.3. This 3-sphere branch-covers the 3-sphere inSO(3) case 4 to 1.
The fiberwise Klein-four group element such as ia will change some of Pi to −Pi. Theireffect is the changing of the signs of h(di). Thus the above branched covering is induced by{I, ia, ib, ic} action where each one has a circle of fixed point or no fixed point. Actually,two of them are so and one of them is equivalent to −I in S3.
Since rep−I(π1(Σ1), SU(2)) is topologically a manifold, the tubular neighborhood of theregion above AA is homeomorphic to S3×B3 and covers the tubular neighborhood of the3-sphere in SO(3) case 4 to 1.
In all other cases BB, CC′ ,A′A′ , B
′B′ , and C ′C , similar arguments show that the rectangle
times T 32 maps to a 3-sphere in C1 with {I, ia, ib, ic} actions similar to AA case and its
tubular neighborhood homeomorphic to S3×B3 branch covers the tubular neighborhoodof the 3-sphere in C1 in 4 to 1 manner.
Finally, O × T 32 /Z2/ ∼ is homeomorphic to rep−I(π1(Σ1), SU(2)). Again, this follows
from the injectivity and compactness and the Hausdorff property.Now, we go over to the topology of O × T 3
2 /Z2/ ∼: Let V be the union of squareregions over AA, BB, CC′ , A
′A′ , B
′B′ , and C ′C . Suppose we remove the six square regions.
Consider (O − V ) × T 32 /Z2 with the equivalences relations on the faces only. Now, the
space (O − V ) × T 3/ ∼ is a toric variety V over the octahedron with vertices removedsince the fiber over the faces and the edges satisfy the desired conditions. By removingthe T 3
2 /Z2-invariant neighborhood of square regions AA,BB,CC′ ,A′A′ , B
′B′ , and C ′C , and
considering the region M in our quotient space over it, we obtain a toric variety over anoctahedron with neighborhoods of the ends removed.
Since the boundary of the closure M is a union of six five-dimensional manifolds home-omorphic to S3×S2. Thus, we can glue six neighborhoods of S3 homeomorphic to S3×B3
to obtain the octahedral manifold.�

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 69
10. The topology of the other component C1
In this section, we will describe the topology of the other component C1.We first discuss fiberwise action and then the axial action induced from that of O.
We consider our space T 32 -fibers over the octahedron with the equivalence relations O ×
T 32 /Z2/ ∼ as determined in Section 8.
10.1. The fiberwise action. Again, we define ia, ib, and ic that acts on the T 32 /Z2 part.
ia is defined by (θ0, θ1, θ2) 7→ (θ0+2π, θ1+2π, θ2) and ib by (θ0, θ1, θ2) 7→ (θ0, θ1+2π, θ2+2π)and ic by (θ0, θ1, θ2) 7→ (θ0 + 2π, θ1, θ2 + 2π). Again, this amounts to changing some ofthe pasting maps by multiplications by −I.
We ignore {I, IA, IB, IC}-action for the moment:In the domain over the interior of O, the action is free and there is no branched locus.In the regions over the interiors of faces, the {I, ia, ib, ic} actions are also free: consider
these actions as translations in the tori T 32 / ∼ where ∼ is generated by vectors parallel to
the normal vectors of form (±2π,±2π,±2π) where the signs depend on which faces youare on.
Consider ao for now. Then ia, ib, and ic correspond to translations by (2π, 2π, 0),(0, 2π, 2π), and (2π, 0, 2π) respectively. Then these vectors can be seen to be parallelto the plane of the quotient tori with generators (4π, 0,−4π) and (0, 4π,−4π) since wecan change the signs of translation vectors since we are working mod 4π. We see easilythat these translations are not trivial even under the order 3 translation group actions.Therefore, the fiberwise Klein four-group acts nontrivially here.
Similar considerations shows that the fiberwise Klein four-group actions are free overthe interiors of faces.
The twelve edges of O form three classes given by three respective equations x =π/2, y = π/2, z = π/2. That is, four edges satisfy x = π/2, the next four edges satisfyy = π/2 and the last four edges z = π/2. Over the interiors of edges, the equivalencerelation gives us circles. Thus, we have twelve annuli over the edges.
Over the interiors of edges, by considering the equivalence classes, we deduce that ifthe edge is in the class given by x = π/2, then the circle over it is a fixed under ib andeach of ia and ic have no fixed points. If the edge is in the class given by y = π/2, thenthe circle over it is fixed under ic and each of ib and ic has no fixed points. If the edge isin the class given by z = π/2, then the circle over it is fixed under ia and each of ib andic has no fixed points.
For ib, then the four annuli over the interiors of the edges given by x = π/2, will extendto a circle in vertex 3-spheres fixed by ib. (See Subsubsection 8.3.3 and the proof ofTheorem 9.1.) Hence, we see that the four annuli patch up to a 2-torus. Similarly, ia fixesa union of four annuli forming a torus over the edges given by y = π/2. Finally, ic fixesa torus that is a union of four annuli over the edges given by z = π/2. (There three toriare mutually disjoint.) Denote these torus by tx, ty, tz.
10.2. The axes action. Finally, let us study what are the branch locus of IA, IB, IC .The set of branch locus is as follows: IA has a fixed axis in O. IA acts by taking the upper
triangle and lower triangle so that v0 and v1 are changed to their antipodes and v′0 and v′1are changed to their antipodes also and the corresponding pasting angles are changed by

70 SUHYOUNG CHOI
the map θi → 2π−θi for i = 0, 2. Then we see that if one compute h(di) in this setting, weobtain that pasting maps P0, P1, P2 changes to P0, P1, P2 and hence h(d1) is not changedand h(d2) is changed to h(d2). Finally, we need to conjugate by rotation R := R[0,1,0],π.Thus u1 is mapped to R(u1) and h(d2) is changed to Rh(d2)R
−1. Hence, if an isometryF of S2 maps u1 to [0, 1, 0]. and fixed [1, 0, 0] to find coordinates for h(d2), then we havethat RFR−1 sends R(u1) to [0, 1, 0] and fixes [1, 0, 0]. Since RFR−1Rh(d2)R
−1RF−1R−1 =RFh(d2)F
−1R−1, we see that coordinate for h(d2) is R times the old coordinates. Thus, Rcorrespond to a diagonal matrix with entries −1, 1,−1, 1 under the coordinate of Remark8.4. Thus, R acts as an involution with fixed circle S1
R through [0, 1, 0, 0] and [0, 0, 0, 1].this action is given by the diagonal matrix with entries 1,−1,−1, 1.
In a fiber in Oo × T 32 /Z2 over the axis part in Oo, the fixed points of IA is a union of
two circles given by φ0 = 0, 2π and φ1 = 0, 2π mod Z2-action. The circle is parameterizedby φ2. Thus, in Oo × T 3/Z2, the set of fixed points is a union of two annuli and extendsin to AA the circle S1
R, and similarly, we can show it extends to a circle. Hence, the fixedset is a 2-torus.
Similarly, the fixed set of IB is a 2-torus meeting the first torus at fibers over (π/2, π/2, π/2)at two points. The fixed set of IC is a 2-torus meeting the two other torus at fibers over(π/2, π/2, π/2) at two points. The three 2-tori meet at the same pair of point.
Denote these tori by TA, TB, TC . Then TA meets each of tx and ty at a pair of pointsrespectively in regions AA and A′A′ . Also, TB meets each of ty and tz at a pair of pointsrespectively in regions BB and B′B′ , and TC meets each of tx and tz at a pair of pointsrespectively in regions CC′ and C ′C . These are complete intersection patterns.
Theorem 10.1. The other component C1 is homeomorphic to the quotient of filled octa-hedral manifold with the product Klein four-group action given by the action of IA, IB, IC,ia, ib, and ic.
Acknowledgments
We thank Bill Goldman for helping us understand the many issues in this area. Wealso thank AIM, Palo-Alto for organizing a conference in March, 2007 where we were ableto work on some of the ideas presented here. We also thank Sadayoshi Kojima and theDepartment of Mathematical and Computing Sciences at Tokyo Institute of Technologyfor their great hospitality while this work was being carried out. We should say that thiswork was inspired by the view points of the configuration points from the works of manypeople including Thurston, Yoshida, Kojima, Kapovich, and Millson.
This work was supported by the Korea Research Foundation Grant funded by theKorean Government (MOEHRD)” (KRF-2007-314-C00025).
References
[1] M. Berger, Geometry I. Springer-Verlag, Berlin 1994[2] S. Bradlow, O. Garca-Prada, P. Gothen, Surface group representations and U(p, q)-Higgs bundles.
J. Differential Geom. 64:111–170, 2003[3] S. Bradlow, O. Garca-Prada, P. Gothen, Representations of surface groups in the general linear
group. Proceedings of the XII Fall Workshop on Geometry and Physics, 83–94, Publ. R. Soc. Mat.Esp., 7, R. Soc. Mat. Esp., Madrid, 2004.

THE SO(3)–REPRESENTATIONS OF THE SURFACE GROUPS 71
[4] S. Choi, Geometric structures on orbifolds and the varieties of holonomy representations. GeometriaeDedicata, 104:161-199, 2004.
[5] S. Choi and W. M. Goldman. The deformation spaces of projectively flat structures on 2-orbifold.American Journal of Mathematics, 127:1019–1102, 2005.
[6] K. Corlette, Flat G-bundles with canonical metrics, J. Differential Geom. 28:361–382, 1988[7] S.K. Donaldson, Twisted harmonic maps and the self-duality equations, Proc. London Math. Soc.
(3) 55:127–131, 1987.[8] N.J. Hitchin, Lie groups and Teichmller space, Topology 31:449–473, 1992[9] W. Goldman. Geometric structures on manifolds and varieties of representations. Contemp. Math.,
74:169–198, 1988.[10] W. Goldman. The Symplectic nature of fundamental groups of surfaces. Advances in Mathematics,
54, 200–225 (1984)[11] W. Goldman. Representations of fundamental groups of surfaces. Lecture Notes in Mathematics vol
1167. 95–117 (1985)[12] W. Fulton. Introduction to toric varieties. Annals of Mathematics Studies, No. 131. 1993[13] J. Huebschmann. Smooth structures on certain moduli spaces for bundles on a surface. Journal of
Pure and Applied Algebra, 126:183–221, 1998.[14] J. Huebschmann, Poisson geometry of flat connections for SU(2)-bundles on surfaces Mathematische
Zeitschrift, 221:243–259, 1996.[15] L.C. Jeffrey, J. Weitsman, Toric structures on the moduli space of flat connections on a Riemann
surface: volumes and the moment map. Adv. Math. 106 (1994), no. 2, 151–168.[16] L.C. Jeffrey, J. Weitsman, Toric structures on the moduli space of flat connections on a Riemann
surface. II. Inductive decomposition of the moduli space. Math. Ann. 307 (1997), no. 1, 93–108.[17] K.B. Lee, Frank Raymond, Seifert manifolds. Handbook of geometric topology, 635–705, North-
Holland, Amsterdam, 2002.[18] M. Masuda, Equivariant cohomology distinguishes toric manifolds Advances in Mathematics,
218:2005–212, 2008[19] M.S. Narasimhan, S. Ramanan, Moduli of vector bundles on a compact Riemann surface. Ann. of
Math. (2) 89 1969 14–51.[20] M.S. Narasimhan, C.S., Seshadri, Stable and unitary vector bundles on a compact Riemann surface.
Ann. of Math. (2) 82 1965 540–567.[21] P.E. Newstead, Topological properties of some spaces of stable bundles Topology 6. 1967 241–262.[22] P.E. Newstead, Stable bundles of rank and odd degree over a curve of genus 2. Topology 7. 1968
205–215[23] C.T. Simpson, Higgs bundles and local systems, Inst. Hautes tudes Sci. Publ. Math. 75:5–95, 1992.[24] W. Thurston. Three-Dimensional Geometry and Topology: vol1. . Princeton University Press, 1997.
Department of Mathematics, KAIST, Daejeon 305-701, South Korea