Embed Size (px)
Citation preview

5 34 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. ASSP-25, NO. 6, DECEMBER 1911
duction of dimensionality,” ZEEE Trans. Comput., vol. C-23, pp. 470-476, May 1974.
[24] B. R. Hunt and T. M. Cannon, “Stationary assumptions for Gaussian model of images,”ZEEE Trans. Syst., Man, Cybern., vol. SMC-6, pp. 845-853, Dec. 1976.
[25] M. D. Srinath and M. M. Viswanathan, “Sequential algorithm for identification of parameters of an autoregressive process,” ZEEE Trans. Automat. Contr., vol. AC-20, pp. 542-546, Aug. 1975.
[26] J. Makhoul “Linear prediction: A tutorial review,” Proc. IEEE, vol. 63, pp. 561-580, Apr. 1975.
[27] J. Mishra and V. S. Rajamani, “Least-squares state estimation in time-delay systems with colored observation noise: An innova- tions approach,” ZEEE Trans. Automat. Contr., vol. AC-20, pp. 140-142, Feb. 1975.
[28] R. Priemer and A. G. Vacroux, “Smoothing in linear discrete systems with time delays,” Znt. J. Contr., no. 13, pp. 299-303, 1971.
[29] V. Shukla and M. D. Srinath, “Sequential estimation in linear systems with multiple time delays,” Znformat. Contr., vol. 22, pp. 471-486, June 1973.
The Measurement of Phase Distortion Due to Filtering in Digital Pictures
Ahstroet-This paper introduces a measure of phase distortion due to ~ ( m , , oz) = 1 ~ ( ~ ~ , w z ) l exp ( j ~ ( ~ ~ , wz) ) (1) filtering in digital pictures. Given the amplitude spectrum of an input picture and the desired and actual frequency responses of a digital fiiter, and the measure may be calculated. When the measure is applied to output pictures of a filter, the acceptability of the phase response of the fiiter ~ ( U I , = l%wl, Q z ) ~ exP ( jP(wl> W ) ) . (2) may be judged. When &litude response of &e input picture is modeled bv a simole function. an estimate of the measure mav be The Fourier transform of a digital input picture { fmn } with M calculated with greatly reduced storage requirements and computation rows and is time. Examples illustrating the results are included.
F(u1, C J Z ) = fmn ~ X P ( - i ( m ~ l + ~ w 2 ) ) . (3) M-t N-1
m=O n=O
I . INTRODUCTION
I T IS BEING increasingly recognized that when complex functions such as Fourier transforms are represented in polar
coordinates, phase is more important than amplitude. Larmore et al. [l J and Kermisch [ 2 ] have shown the importance of phase information in holography. Huang et al. [3] have dem- onstrated the significance of phase in digital image-processing filters. In general, the phase of a digital filter will have error. Linear phase, which does not degrade the phase of input sig- nals, cannot be obtained in causal, realizable IIR digital filters. Even though FIR digital filters may have linear phase, this phase often has discontinuities of 71. Nonlinear phase charac- teristics, which may be specified for Wiener filters and matched filters, are generally not realizable with zero error. The filter design methods of Steiglitz [4] and Manry and Aggarwal [5] minimize magnitude error functions and have nonlinear phase characteristics.
Let H(wl, oz) and z ( o l , oz) be the desired %nd actual frequency responses, respectively, of a digital filter. H ( q , w z ) has amplitude and phase error and may be the frequency re- sponse of an IIR or FIR digital filter. The frequency responses may be expressed, using amplitude and phase, as
Manuscript received June 7, 1976; revised January 12, 1977 and June 30, 1977. This research was supported in part by NSF Grant ENG74-04986,andinpartby JSEPAFOSRContractF49620-77-(2-0101.
The authors are with the Department o f Electrical Engineering, Uni- versity of Texas at Austin, Austin, TX 78712.
If { f m n } is filtered using the desired filter, the output picture { pmn } has the Fourier transform
P(w,,w2)=F(w1,02)H(01,02)
= F ( o , , LJZ) INw,, wz)l exp W(w1, wzN.
(4)
The effects of the phase error of g(wl, oz) are of interest to us in this paper. We therefore construct a frequency response
~ ( w l , w z ) = l H ( o l , w z ) . I e x P ( ~ P ( w l , o z ) ) (5)
which has the phas: error but not the amplitude error of g(ol, w2). When H(wl, wz) is used to filter the input pic- ture { f m n }, the output picture is { f i m n } which has the Fourier transform
~ ~ ~ l , ~ z > = ~ ( ~ l ~ ~ z ) ~ ( ~ l , ~ z )
=P(01,02> exp (jm(w1,oz)) (6)
where
m(ol ,wZ)=cp(wl,o2)- e(ol ,wz) . (7)
The error between { pmn } and { fimn } is called phase distor- tion and is caused by the phase error function m ( o l , w 2 ) . The phase response ~ ( q , w z ) is acceptable in a given applica- tion if the phase distortion produced by m(wl, w z ) is mea- sured and found to be small. One may attempt to measure the phase distortion of filtering by measuring m(w,, 02), but

such a measure does not change as the input picture changes. This type of measure has the same value for sine wave and wide-band input pictures. However, a sine wave never suffers phase distortion, while a wide-band input picture often suffers phase distortion.
Phase distortion is important when the distorted pictures are processed by machine only and also when a person judges the pictures. The measure of phase distortion developed in this paper is applicable to both cases and is based upon the Euclid- ean distance between { p m n } and { $mn }. We show how to c_alculate our measure, given IF(o l , w2)l, H ( o 1 , wz), and H ( w l , w 2 ) . We propose a simple model of IF(w,, wz)l which allows us to estimate the measure, thereby saving computation time and storage. In Section V we will illustrate a method of determining acceptable values of the measure of phase distor- tion. For three filters and two input pictures, we calculate and estimate the phase distortion in the output pictures.
11. A MEASURE OF PHASE DISTORTION In this section we review a few facts about the discrete
Fourier transform (DFT), develop a measure of phase distor- tion, and give a few properties of the measure.
The output picture { p m n } , which has M rows and N col- umns, has a DFT {Pk l } , which satisfies the equation
The DFT relation is precisely written as
and
where U = exp (-j2n/M) and V = exp (-j2n/N). Equations (9) and (1 0) are denoted by
Pmn t - - fpk l .
One can see from (8) and (9) that { Pkl} is a sampling of one period of P(wl, w 2 ) at MN points. { Pkl} satisfies the radial symmetry condition
' k l = ' h - k ] ~ , [ N - l ] ~ ( 1 1) where [ . I M denotes an integer modulo M and [.IN denotes an integer modulo N . . The output picture { S m n } , described in Section I, satisfies
A A
Pmn -pkl ( 1 2)
Ipkll = lPkll (13)
and
pkl =pkl exp ( jmk l> (14)
where
mkl = m((2n/M)k, (2n/N)Z). (1 5)
A measure of phase distortion in { fimn 1, due to the effects of m(wl , w2 ), is
& P, 6) =
MANRY AND AGGARWAL: MEASUREMENT OF PHASE DISTORTION 535
. - .
which is the normalized squared Euzlidean distance between { pm; } and { &, }. The measure D( p , 3 ) can be expressed in the frequency domain as
k=O 1=0
M-1 N-1 2 Ipk112
k=O I=O
Filtering shifts the output with respect to the input. The fact that a shifted picture is recognizably the same as one which has not been shifted means tkat we must remove the effects of shifts due to filtering from D ( p , $). The phase response of a filter which linearly shifts the output with respect to the input is
where K and L are nonnegative integers. The phase sequence { &}, derived from (18), is
& l = - ( K / 2 ) ( 2 ~ / M ) k - (L/2) (2n/N)Z t nyk l ( 1 9 )
where for K and L even
u(k - M/2) , for K odd and L even Y k l =
u(Z - N / 2 ) , . for K even and L odd
\u(k - M/2) t u(Z - N / 2 ) , for K and L odd (20)
and where 0, forx < O
1 , forx>O. u(x) =
From (19).and the definitions of Uand V
In addition to its shifting effect, filtering can cause the output picture to be close to or equal to the neg2tive of the input picture. We can remove this effect from D ( p , p") by using a variable 6 which equals +1, Based upon these observations our measure of phase distortion is
k=O 1=0
The measure D( p , $) has the property
O < D ( p , $ ) < 1 .
The advantages to using D( p , 6) as a measure of phase distor- tion are:
1) phase differences of 2n are equivalent to zero phase dif- ferences;

536 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. ASSP-25, NO. 6 , DECEMBER 1977
2) the amplitude sequence weights the phase differences; 3) D ( p , $) may be calculated fairly easily, using the FFT.
One disadvantage of D ( p , p^) as a measure of phase distortion is that it measures the summation of the squared error rather than the maximum absolute value of the error. However, D ( p , $) may be calculated much easier and much faster than a comparable minimax error function.
111. EVALUATION AND APPLICATION OF D(p,p^) In this section we show how to evaluate D( p , p^) and how to
Lemma 1: Given {Pkl} , {Pkl} , M , and N , use it in judging filter phase Fsponses.
D ( P , $) = 1 - (max I b,, I)/; m ,n
where
of D and the degraded pictures, we can determine how large D can get before the picture { $,,} is unrecognizable. We de- note the largest allowable value of D( p , $) as Dm.
We have shown how to calculate D(p, p^) w h y the output- picture frequency characteristics { P k l } and { P k l } are given. In the folIowing we show how to calculate D(p, p^) when the frequency characteristics of the input picture and filter are given. The DFT versions of (4) and ( 6 ) are
pkl =Fkl IffkZl exp ( j e k f ) (25)
and
' k l = Fkl IHklI exp ( j p k l ) (26)
where
Hkl =H((2T/M)k, (2n/N)l),
A
bmn f--, p z l pkZ, for K and L even
b,, t----f P,& Fk1 U k12 VZt2 exp (jrr yk l ) , for K and L odd
bm, * P ~ I ~ k l U k 1 2 exP ( jnyk l ) , for K odd and L even
bm, up,*,%l V"' exp ( jnyk l ) , for K even and L odd.
Proof: The proof is for K and I, even. The proofs for K and/or L odd follow similarly. Equation (22) yields
q k l ?((2n/Mlk, (2rr/N)z).
Notice that the factor PEfpkj occurs in each of the expressions of (24). Using (23), (25), and (26)
2 lPkl12 M-1 N-1
k=O Z=O
which can be simplified, using (21) and (23), to give
D(P, a =
Replacing K / 2 by m and L/2 by n and using (24) for K and L even, we have
D( p , $) = 1 - ( max (6 bmn))/E^. m,n,6
The variable 6 can be eliminated by an absolute value, giving
D ( P , $1 = 1 ' ( m u I bmn I)/;. m , n
Q.E.D.
Given an example picture { p,,} and several sequences, {mkl} , of phase distortion numbers, (12)-( 14) can be used to generate degraded pictures {$,,}, and the corresponding values of D can be calculated using Lemma 1. With the values
and
p,*,&l = IFk1I2 IHk1I2 exp ( j (?k l (28)
It is interesting to note that the amplitude of { F k z } , but not its phase, is used in (27) and (28). D( p , 6) may be calculated using (27), (28), and Lemma 1, given only { I Fkl I}, { I Hkl I}, { d k l } , and { q k l } . To find out whether or not a filter has an acceptable phase response, we may calculate D ( p , p^) for the filter and several input pictures or test patterns. If D ( p , $) tends to be greater than Dm, the filter is not useful. This testing procedure uses much computation time and storage if M and N are large.
Equations (14), (is), and (26) correspond to circular con- volution, and Lemma 1 requires the evaluation of a circular correlation. AlsoAthe frequency responses exp ( jm(w , , a,)), H(wl, a,), andH(w,, w,) generally correspond to an infinite number of filter coefficients, implying that M and N should be infinite. However, our main purpose is to find and use D(p,$) rather than to filter pictures, so circular convolution and circu- lar correlation are acceptable.
IV. ESTIMATION OF D(p,p^) When sampling H(ol, w 2 ) to produce { H k l } , M and N may
equal 128, for example, and be large enough for the represen-

MANRY AND AGGARWAL: MEASUREMENT OF PHASE DISTORTION 5 37
Fig. 1. Spoke test pattern.
tation to be accurate. However, when IF(ol, 02)l and P ( o l , w 2 ) are sampled to produce { 1 Fkl I} and { P k l } , M and N are typically equal t o the pictures dimensions, which may be much larger than 128 by 128. If the in_put spectrum I F ( o l , 0 2 ) l
is modeled by a smooth function IF(ol, 0 2 ) l , which is accu- rately represented by a small number of samples, we can greatly reduce M and N and estimate D(p, p^), thereby saving storage and computation time.
The Fourier transform of a one-dimensional pulse is a sinc function which dies off as l/o and has a value of 1 for o = 0, Similarly, as in [6] the two-dimensional Fourier transform of a disk-shaped pulse dies off approximately as 1 /R where
R = (w: t (29)
A simple model of the input-picture amplitude response IF(%, 0 Z ) l is
IF(W1, o z ) I = 1/(1 a w (30)
which dies out approximately as 1/R. The constant a may be varie_d until the appmximation is accurate. The digital version of 1 F(ol, w2)l is { I Fkl I}, which is defined by
I % l l = I ~ ( (w1 ,WZ) l
O1 ={ ::iE:Kk’- 2n, k >M/2
k <M/2
O2 = { :::;:’- 257, 1 > N / 2 .
I < N / 2
Replacing { I Fkl I } by uFkl I} in (27) and (28), we may use Lemma 1 to calculate ~ ( p , f i ) , an estimate of ~ ( p , 6). In
general, IF(ol, w2)l is a much smoother function than lF(w,, w2)l, allowing us to reduce M andN, save storage, and save computation time.
The estimation technique of this section greatly simplifies the testing procedure for filter phase responses of Section 111. Assume that IP(ol, 0 2 ) l is a model for all input-picture am- plitude spectrums 1 F(ol, oz)l of interest to-us. To test the phase response of a filter we can compute D ( p , p^) one time and compare it to Dm. When a filter is designed by the method of Manry and Aggarwal [5.] , c( p , p^) may be calculated at each iteration. When E ( p , p^) becomes larger than D m , the design algorithm may be terminated. The resulting filter will hope- fully have good amplitude and phase.
V. NUMERICAL RESULTS In this section we distort the phase of a test pattern by the
method of (1 2)-(14) and by filtering and we then measure D for the degraded images. The actual values of D are com- pared to estimates obtained through the modeling procedure of Section 111. All processing was done on a CDC 6600 com- puter at The University of Texas at Austin. The pictures are printed in 16 grey levels with darker shades denoting more positive intensities.
Example I : Using (12)-(14), we distorted the phase of the spoke test pattern { p m n } of Fig. 1 with three zero-mean Gaussian noise sequences {mkl} . The sequences differ only in their standard deviations (i.e., the sequences are multiples of each other). The. resulting pictures {sm,} for standard deviations of 0.13, 0.375, and 1.0 are shown in Figs. 2-4, respectively. The corresponding values of D(p, p^) are: 0.0096, 0.0787, and 0.32.
It is apparent from the figures that as a picture’s phase is distorted, its energy is redistributed in the spatial domain. This is a type of smearing.
Example 2: As a second example, we distorted the phase of { pmn } in Fig. 1 using the deterministic function
m ( o l , oz) = 0.9(w: t ~ 2 2 ) ~ ’ ~ (al t w2). (3 1)
The resulting picture { smn}, shown in Fig. 5, corresponds to
D(p,p^) = 0.0779. (3 2)
It is apparent that although the deterministic distortion of Fig. 5 differs from the random distortion of Fig. 3, the figures are equally recognizable as spoke patterns and the values of D for the two figures are about the same.
Example 3: As a third example, we filtered the test pattern of Fig. 1 using [5, filters 1.2 and 1.31 , which are seventh-order FIR filters. The’desired amplitude response for both filters is
and the desired phase response is that of (18) with K = L = 7. As seen in [SI, filter 1.2 has a nonlinear phase response and filter 1.3 has a linear phase response with several discontinuities of n. Equation (33) defines a ring-shaped passband.
For filter 1.2, the actual value of D, with M = N = 128, is

538 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. ASSP-25, NO. 6 , DECEMBER 1977
Fig. 2. { $ma} for D( p , p̂ ) = 0.0096. Fig. 4. { Fm0} for D( p , p ^ ) = 0.32.
Fig. 3. { Fmn} for D( p , $ > = 0.0787.
D( p , p )̂ = 0.078 (34) and the output picture is shown in Fig. 6 . For filter 1.3, the actualvalue o f D , withM=N= 128,is
D( p , p^) = 0.00974 (35) and the output picture is shown in Fig. 7.
Fig. 5 . { Smn} for D( p . $) = 0.0779.
From (34), filter 1.2 produces about the same amount of phase distortion as that seen in Fig. 3. From Fig. 3, one can correctly infer that the phase distortion seen in Fig. 6 is moderate. I f opposing spokes in Fig. 6 are compared, it is noticed that, unlike the spoke pattern of Fig. 1, this filtered spoke pattern lacks radial symmetry. From (3.9, filter 1.3

MANRY AND AGGARWAL: MEASUREMENT OF PHASE DISTORTION 539
Fig. 6 . Output picture for filter 1.2.
Fig. 7 . Output picture for filter 1.3.
produces almost the amount of phase distortion seen in Fig. 2. Although Fig. 2 reflects a noticeable amount of phase distor- tion, it is not easily detectable because filter 1.3 has linear phase and Fig. 7 has radial symmetry.
For both filters, the values of D ( p , 3) were estimated using the method of Section IV, with M = N = 32 and a = 32. In
Figs. 8 and 9, respectively, {I Fkl I I and our model { I pkl I I are shown for M = N = 128. The constant a is picked to be 32 for the model so that the dark regions in Figs. 8 and 9 are approx- imately the same in area. For filter 1.2, our estimate of D is

540 IEEE TRANSACTIONS ON ACOUSTICS, SPEECH, AND SIGNAL PROCESSING, VOL. ASSP-25, NO. 6 , DECEMBER 1977
Fig. 10. Amplitude response of filter 2. Fig. 11. Phase response of filter 2 .
while for filter 1.3 our estimate of D is
E( p , p^) = 0.00926. (37)
Comparing (34) to (36) and (35) to (37), we see that the esti- mation procedure of Section IV works well for this example.
Example 4: As a fourth example, we designed filter 2 by the phase correction algorithm, calculating E ( p , p )̂ in each itera- tion with M = N = 64, a = 32, and Dm = 0.03. Filter 2 is from the tenth iteration where
E ( p , p ^ ) = 0.0296. (38)
Filter 2 is the last filter for which
z ( P , P ^ ) G D m .
The desired amplitude response is
(39)
i 1, i fR 'G8and
A ( w , = U G 0 . 4 or R2 2 4 . 5 ,
0 , otherwise (40)
where
u=lloll- 1 0 2 l l
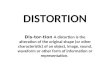
and Fig. 12. Spiral input picture.
R2 = wi + w i .
The desired phase response is that of (l8), with K = L = 7. The amplitude and phase responses of filter 2 are shown in Figs. 10 and 11, respectively. The dark and light areas in Fig. 10 repre- sent pass and reject regions, respectively. The darkest and lightest grey levels in Fig. 11 represent phases of 71 and -71, re- spectively. We applied filter 2 to the spiral input picture of Fig. 12, which has a frequency characteristic similar to that of the spoke test pattern. The output picture is given in Fig. 13.
Examining the amplitude response of Fig. 10, we expect filter 2 to blur horizontal and vertical edges and to pass edges that are rotated +45" from the horizontal. These effects are clearly visible in Fig. 13. Phase distortion is most noticeable
for edges rotated +45" from the horizontal. However, the phase distortion of Fig. 13 is much less severe than that seen in Figs. 5 and 6. The actual value of D ( p , p^) for filter 2 and the spiral input picture of Fig. 12 is
D(p,p^) =0.033. (41)
This is not far from the estimate of (38). As our examples show, it is possible to measure the phase
distortion, due to filtering, in digital pictures. Using the mea- sure, the acceptability of filter phase responses can be deter- mined. Using a simple model of input-picture amplitude responses, the measure D may be estimated. The estimation procedure is useful in filter design.

MANRY AND AGGARWAL: MEASUREMENT OF PHASE DISTORTION 541
Fig. 13. Output picture for filter 2. ’
REFERENCES
[ I ] L. Larmore, B. M. A. El-Sum, and A. F. Metherell, “Acoustical holograms using phase information only,” Appl. Opt. , vol. 8,
[2] D. Kermisch, “Image reconstruction from phase information only,” J. Opt. SOC. Amer., vol. 60, pp. 15-17, Jan. 1970.
[3] T. S. Huang, J. W. Burnett, and A. G. Deczky, “The importance of phase in image processing fdters,” IEEE Trans. Acoust., Speech,
pp. 1533-1536, Aug. 1969.
Signal Processing, vol. ASSP-23, pp. 529-542, Dec. 1975. [4] K. Steiglitz, “Computer-aided design of recursive digital filters,”
IEEE Trans. Audio Electroacoust., vol. AU-18, pp. 123-129, June 1970.
[5] M. T. Manry and J. K. Aggarwal, “The design of multi-dimensional FIR digital filters by phase correction,” IEEE Trans. Circuits Syst.,
[6] J. W. Goodman, Introduction to Fourier Optics. New York: VOI. CAS-23, pp. 185-199, Apr. 1976.
McCraw-Hill, 1968.