Embed Size (px)
Citation preview

Arch Comput Methods Eng (2009) 16: 161–188DOI 10.1007/s11831-009-9031-8
O R I G I NA L PA P E R
The Hysteresis Bouc-Wen Model, a Survey
Mohammed Ismail · Fayçal Ikhouane · José Rodellar
Received: 14 November 2008 / Accepted: 14 December 2008 / Published online: 20 February 2009© CIMNE, Barcelona, Spain 2009
Abstract Structural systems often show nonlinear behav-ior under severe excitations generated by natural hazards. Inthat condition, the restoring force becomes highly nonlinearshowing significant hysteresis. The hereditary nature of thisnonlinear restoring force indicates that the force cannot bedescribed as a function of the instantaneous displacementand velocity. Accordingly, many hysteretic restoring forcemodels were developed to include the time dependent natureusing a set of differential equations. This survey containsa review of the past, recent developments and implementa-tions of the Bouc-Wen model which is used extensively inmodeling the hysteresis phenomenon in the dynamically ex-cited nonlinear structures.
1 Introduction
This paper deals with the analysis, modeling and identifica-tion of a special class of systems with hysteresis. This non-linear behavior is encountered in a wide variety of processesin which the input-output dynamic relations between vari-ables involve memory effects. Examples are found in bi-
M. Ismail · J. Rodellar (�)Dept. of Applied Mathematics III, School of Civil Engineering,Technical University of Catalonia, Campus Nord, Module C-2,08034 Barcelona, Spaine-mail: [email protected]
M. Ismaile-mail: [email protected]
F. IkhouaneDept. of Applied Mathematics III, Technical School of IndustrialEngineering of Barcelona, Technical University of Catalonia,Comte d’Urgell, 187, 08036 Barcelona, Spaine-mail: [email protected]
ology, optics, electronics, ferroelectricity, magnetism, me-chanics, structures, among other areas. In mechanical andstructural systems, hysteresis appears as a natural mecha-nism of materials to supply restoring forces against move-ments and dissipate energy. In these systems, hysteresisrefers to the memory nature of inelastic behavior where therestoring force depends not only on the instantaneous defor-mation, but also on the history of the deformation.
The detailed modeling of these systems using the lawsof Physics is an arduous task, and the obtained models areoften too complex to be used in practical applications in-volving characterization of systems, identification or con-trol. For this reason, alternative models of these complexsystems have been proposed. These models do not come, ingeneral, from the detailed analysis of the physical behaviorof the systems with hysteresis. Instead, they combine somephysical understanding of the hysteretic system along withsome kind of black-box modeling. For this reason, some au-thors have called these models “semi-physical”.
Within this context, a hysteretic semi-physical model wasproposed initially by Bouc early in 1971 and subsequentlygeneralized by Wen in 1976. Since then, it was known as theBouc-Wen model and has been extensively used in the cur-rent literature to describe mathematically components anddevices with hysteretic behaviors, particularly within the ar-eas of civil and mechanical engineering. The model essen-tially consists in a first-order non-linear differential equationthat relates the input displacement to the output restoringforce in a hysteretic way. By choosing a set of parametersappropriately, it is possible to accommodate the response ofthe model to the real hysteresis loops. This is why the mainefforts reported in the literature have been devoted to thetuning of the parameters for specific applications.
The starting point of the so-called Bouc-Wen model isthe early paper by [38], where a functional that describes

162 M. Ismail et al.
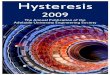
Fig. 1 Graph force versus displacement for a hysteresis functional
the hysteresis phenomenon was proposed. Consider Fig. 1,where F is a force and x a displacement. Four values of Fcorrespond to the single point x = x0, which means that Fis not a function. If we consider that x is a function of time,then the value of the force at the instant time t will dependnot only on the value of the displacement x at the time t ,but also on the past values of x. The following simplifyingassumption is made in [38].
Assumption 1 The graph of Fig. 1 remains the same for allincreasing function x(·) between 0 and x1, for all decreasingfunction x(·) between the values x1 and x2, etc.
Assumption 1 is what, in the current literature, is calledthe rate-independent property [318]. To precise the form ofthe functional F , [38] elaborates on previous works to pro-pose the following form:
dF
dt= g
(x,F , sign
(dx
dt
))dx
dt. (1)
Consider the equation
d2x
dt2+ F (t) = p(t) (2)
for some given input p(t) and initial conditions
dx
dt(t0), x(t0) and F (t0) (3)
at the initial time instant t0. Equations (1) and (2) describecompletely a hysteretic oscillator.
The paper [38] notes that it is difficult to give explicitlythe solution of (1) due to the nonlinearity of the function g.For this reason, the author proposes the use of a variant of
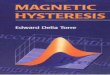
Fig. 2 Evolution of the Bouc-Wen model literature
the Stieltjes integral to define the functional F :
F (t) = μ2x(t) +∫ t
β
F(V t
s
)dx(s), (4)
where β ∈ [−∞,+∞) is the time instant after which thedisplacement and force are defined. The term V t
s is the to-tal variation of x in the time interval [s, t]. The function F
is chosen in such a way that it satisfies some mathemati-cal properties compatible with the hysteresis property. Thefollowing is an example of this choice given in [38] so thatthese mathematical properties are satisfied:
F(u) =N∑
i=1
Aie−αiu, with αi > 0. (5)
Equations (2)–(5) can then be written in the form
d2x
dt2+ μ2x +
N∑i=1
Zi = p(t), (6)
dZi
dt+ αi
∣∣∣∣dx
dt
∣∣∣∣Zi − Ai
dx
dt= 0; i = 1, . . . ,N. (7)
Equations (6)–(7) are what is now known as the Boucmodel. The derivation of these equations is detailed in [38].The objective here is not to enter in these details, but onlygive a short idea on the origin of the model.
Equation (7) has been extended in [325] to describerestoring forces with hysteresis in the following form:
z = −α|x|zn − βx|zn| + Ax for n odd, (8)
z = −α|x|zn−1|z| − βxzn + Ax for n even. (9)
Equations (8)–(9) constitute the earliest version of whatis called now the Bouc-Wen model. This paper presents anoverview of the literature related to this model. It can be seenin Fig. 2 that the last few years have witnessed an increasinginterest to this model with a book dedicated exclusively tothe Bouc-Wen model [140]. This literature encompasses awide range of issues ranging from identification to model-ing, control, analysis, etc. These issues are treated in detailin the following sections.

The Hysteresis Bouc-Wen Model, a Survey 163
2 Physical and Mathematical Consistencyof the Bouc-Wen Model
In the current literature, the Bouc-Wen model is mostly usedwithin the following black-box approach: given a set of ex-perimental input-output data, how to adjust the Bouc-Wenmodel parameters so that the output of the model matchesthe experimental data? The use of system identification tech-niques is one practical way to perform this task. Once anidentification method has been applied to tune the Bouc-Wen model parameters, the resulting model is consideredas a “good” approximation of the true hysteresis when theerror between the experimental data and the output of themodel is small enough. Then this model is used to study thebehavior of the true hysteresis under different excitations.
By doing this, it is important to consider the followingremark. It may happen that a Bouc-Wen model presents agood matching with the experimental real data for a spe-cific input, but does not necessarily keep significant physicalproperties which are inherent to the real data, independentlyof the exciting input. In this section we draw the attentionto this issue by considering physical properties like stability,passivity, thermodynamic consistency etc.
On the other hand, the Bouc-Wen model is a nonlineardifferential equation, and has to have some general math-ematic properties to be used properly. We consider in thissection the existence and uniqueness of the solution of themodel, along with the bijective relationship between the pa-rameters and the input/output behavior.
2.1 Physical Consistency of the Bouc-Wen Model
The following properties have been considered in the litera-ture:
– Bounded input-bounded output (BIBO) stability– Consistency with the asymptotic motion of physical sys-
tems– Passivity– Thermodynamic admissibility– Accordance with Drucker and Il’iushin stability postu-
lates– Consistency with the hysteresis property.
2.1.1 BIBO Stability
The BIBO stability property of the Bouc-Wen model hasbeen formulated in [144] as follows: Let us conceptualizea nonlinear hysteretic behavior as a map x(t) �→ �s(x)(t),where x represents the time history of an input variable and�s(x) describes the time history of the hysteretic outputvariable. For any bounded input x, the output of the truehysteresis �s(x) is bounded. This bounded BIBO stability
property stems from the fact that we are dealing with me-chanical and structural systems that are stable in open loop.
The Bouc-Wen model that approximates the true hystere-sis �s(x) is
�BW(x)(t) = αkx(t) + (1 − α)Dkz(t), (10)
z = D−1(Ax − β|x| |z|n−1z − γ x|z|n) (11)
where z denotes the time derivative, n > 1, D > 0, k > 0,0 < α < 1 and β + γ �= 0 (the limit cases n = 1, α = 0,α = 1, β + γ = 0 are treated separately in [144]).
This model is BIBO stable if and only if the following set� of initial conditions z(0) is nonempty:
� = {z(0) ∈ R such that �BW is BIBO stable for all C1
input signal x(t) with fixed values of the parameters
A,β,γ,n}. (12)
The following is proved in [144].
Theorem 1 Let x(t), t ∈ [0,∞) be a C1 input signal and
z0 � n
√A
β + γand z1 � n
√A
γ − β. (13)
Then, Table 1 holds.
It is shown in [144] that class V corresponds to a linearbehavior so that it is irrelevant for the modeling of hysteresisbehavior.
2.1.2 Consistency with the Asymptotic Motion of PhysicalSystems
Reference [144] considers a structural base-isolation devicemodeled as a SDOF system with mass m > 0 and viscousdamping c > 0 plus a restoring force � characterizing thehysteretic behavior of the hysteretic material. The free mo-tion of the system is described by the second order differen-tial equation
mx + cx + �(x)(t) = 0 (14)
with initial conditions x(0) and x(0), and the restoringforce is assumed to be described by the Bouc-Wen model(10)–(11). The following is proved in [144].
Theorem 2 For every initial conditions x(0) ∈ R, x(0) ∈ R
and z(0) ∈ � �= ∅, the following holds:
(a) For all classes I–IV in Table 1, the signals x(t), x(t) andz(t) are bounded and C1.

164 M. Ismail et al.
Table 1 Classification of BIBOstable Bouc-Wen models Case � Upper Bound on |z(t)| Class
A > 0 β + γ > 0 and β − γ ≥ 0 R max(|z(0)|, z0) I
β − γ < 0 and β ≥ 0 [−z1, z1] max(|z(0)|, z0) II
A < 0 β − γ > 0 and β + γ ≥ 0 R max(|z(0)|, z0) III
β + γ < 0 and β ≥ 0 [−z0, z0] max(|z(0)|, z0) IV
A = 0 β + γ > 0 and β − γ ≥ 0 R |z(0)| V
All Other Classes ∅
(b) Assume that the Bouc-Wen model belongs to the classesI or II, then there exist constants x∞ and z∞ which de-pend on the Bouc-Wen model parameters (α,D,k,A,β,
γ,n), the system parameters (m, c) and the initial con-ditions (x(0), x(0) and z(0)), and there exists a con-stant c that depends on the parameters m,k,A,α,β, γ
such that for all c ≥ c, we have:
limt→∞x(t) = x∞, (15)
limt→∞ z(t) = z∞, (16)
αx∞ + (1 − α)Dz∞ = 0. (17)
Furthermore, we have:
x ∈ L1([0,∞)
)and lim
t→∞ x(t) = 0. (18)
Accordingly, Theorem 2 shows that, for the classes Iand II, the displacement x goes to a constant value asymptot-ically and that the velocity x goes to zero. This is compatiblewith experimental observations for base-isolation deviceswhich means that both classes are good candidates for thedescription of the real physical behavior of a base-isolationsystem. Based on numerical simulations, classes III and IVare shown not to behave in accordance with experimentalobservations.
2.1.3 Passivity
Passivity is related to the energy dissipation and means thatthe system does not generate energy. In [144], the model(10)–(11) is written as:
x = u,
z = D−1(Au − β|u||z|n−1z − γ u|z|n
), (19)
y = αkx + (1 − α)Dkz
where u is the input of the model and y is its output. Denot-ing
l1 = (1 − α)D2k
2A> 0, (20)
l2 = αk
2> 0, (21)
W(x, z) = l1z2 + l2z
2 (22)
it is shown that the Bouc-Wen model is passive with respectto the storage function W .
2.1.4 Thermodynamic Admissibility
The thermodynamic admissibility is investigated in [99] us-ing the endochronic theory (a theory of viscoplasticity with-out a yield surface, proposed in [313]). The Bouc-Wen typemodels that are considered are univariate and tensorial. TheBouc model [38] is univariate and is defined as
w(t) = A0u(t) + z(t), (23)
z(t) =∫ ϑ(t)
0μ(ϑ(t) − ϑ ′) du
dϑ ′ dϑ ′ (24)
where μ = μ(ϑ(t)) is the hereditary kernel and A0 ≥ 0. Theinput u is a relative displacement between two structural el-ements, while the output w is a structural restoring force.The time function ϑ is positive and non-decreasing whichdirectly depends on the strain and/or the stress tensors, andit is named internal or intrinsic time. One of the definitionsof ϑ proposed by Bouc is the total variation of u:
ϑ(t) =∫ t
0
∣∣∣∣du
dτ
∣∣∣∣dτ, or, equivalently,
dϑ = |du|, with ϑ(0) = 0. (25)
In this case (24) becomes
dz = Adu − βz|du|. (26)
A more general formulation of (26) was also proposedin [37]:
dz = Adu − βz|du| − γ |z|du with γ < β (27)
while [325] suggested a further modification, introducingthe positive exponent n:
dz = Adu − (β sign(z du) + γ ) |z|n du. (28)

The Hysteresis Bouc-Wen Model, a Survey 165
Reference [18] introduced the stiffness and strengthdegradation effects in the Bouc-Wen model (28). Only thestrength degradation case is considered in [99]:
dz = Adu − ν (β sign(z du) + γ ) |z|n du (29)
where ν is a positive and increasing function of the energydissipated by the system. A tensorial generalization of (28)is given in [160] for isotropic materials with elastic hydro-static behavior:
σd = A0εd + z, (30)
dz = Adεd − βz‖z‖n−2|z : dεd | − γ z‖z‖n−2(z : dεd) (31)
where εd and σd are the deviatoric part of the small straintensor and of the Cauchy stress tensor, respectively; z is thetensor defining the hysteretic part of the stress, while ‖ · ‖ isthe standard L2-norm.
The following has been proved in [99].
Theorem 3 The Bouc-Wen models of (23)–(31) fulfill thesecond principle of Thermodynamics if and only if the fol-lowing holds:
n > 0, (32)
β > 0, (33)
−β ≤ γ ≤ β. (34)
2.1.5 Accordance with Drucker and Il’iushin StabilityPostulates
Drucker’s postulate [27] implies that the hysteresis systemshould not produce a negative energy dissipation when theunloading-reloading process occurs without load reversal.For the Bouc-Wen model, it has been noted in many ref-erences that this may not be the case, although the effect ofthis violation on the expected results may be minor [48, 131,272, 306, 328].
An attempt to reduce the violation is presented in [47] bymodifying the Bouc-Wen model. On the other hand, [49, 50]show that for n = 1, β +γ > 0 and γ −β ≤ 0 (β being posi-tive by assumption), the Bouc-Wen model verifies Drucker’spostulate. The more general result for n arbitrary is obtainedin Theorem 3 of [99], as the thermodynamic consistency forthe Bouc-Wen model implies that it verifies Drucker’s pos-tulate.
2.1.6 Consistency with the Hysteresis Property
It is shown in [136, 138] that, to be consistent with the hys-teresis property, the Bouc-Wen model (10)–(11) has to ver-ify
maxt≥0
(x(t)) ≤ (1 − α)Dz0
α(35)
where max(x(t)) is the maximal value of the input x(t) fort ≥ 0. The hysteresis property means that the output dependson the sign of the derivative of the input.
2.1.7 Conclusion
As a conclusion of the above results, for univariate Bouc-Wen models, the class I of Table 1 is BIBO stable, consistentwith the motion of physical systems, passive, and consistentwith the second law of Thermodynamics. Furthermore, con-dition (35) is needed for the consistency with the hystere-sis property. For the multivariate Bouc-Wen model, the onlyconsistency result available in the literature is that of [99]stated in Theorem 3.
2.2 Mathematical Consistency of the Bouc-Wen Model
This section presents the results available in the literaturewith regard to
1. The existence and uniqueness of the solution of the Bouc-Wen model.
2. The uniqueness of the description of the Bouc-Wenmodel.
2.2.1 Existence and Uniqueness of Solutions
It is shown in [144] that the differential equations (10)–(11)has a unique solution if n ≥ 1.
2.2.2 Uniqueness of the Description
It is shown in [137] that there exists an infinite number ofdifferent sets of Bouc-Wen model parameters that lead to thesame input/output behavior of the model. This means thatsome parameters of the model are redundant. To eliminatethis redundancy, a normalized form of the Bouc-Wen modelis introduced in [136, 138] by using the transformation
w(t) = z(t)
z0(36)
so that the model (10)–(11) can be written in the form
�BW(x)(t) = κxx(t) + κww(t), (37)
w(t) = ρ(x − σ |x(t)| |w(t)|n−1w(t)
+ (σ − 1)x(t)|w(t)|n) (38)
where
ρ = A
Dz0> 0,
σ = β
β + γ≥ 1
2,
κx = αk > 0,
κw = (1 − α)Dkz0 > 0.
(39)

166 M. Ismail et al.
This form is defined only for the class I as it is con-sistent with the physical properties considered before.The following inequality is also obtained: maxt≥0 w(t) =max(|w(0)|,1).
2.2.3 Conclusion
The mathematical and physical consistency conditions showthat the Bouc-Wen model has to be used under the nor-malized form (37)–(38), along with the inequalities n ≥ 1,ρ > 0, σ ≥ 1/2, κx > 0, κw > 0 and maxt≥0(x(t)) ≤ κw
κx. In
this case, we also have maxt≥0 w(t) = max(|w(0)|,1).
3 Description of the Hysteresis Loop
When the input displacement is periodic with a loading-unloading shape, it is observed by means of numerical sim-ulations that the output Bouc-Wen restoring force is also pe-riodic asymptotically with the same period as the input. Thisfact has been demonstrated analytically only recently due tothe nonlinearity of the model [137]. The hysteresis loop isthe cycle obtained asymptotically when the hysteresis out-put is plotted versus the displacement input. Two types ofproblems have been discussed in the literature:
– Consider that the input is a periodic displacement and theoutput is the Bouc-Wen restoring force.
– Consider that the input is an external periodic force, andthe output is the displacement of a second-order systemthat includes a Bouc-Wen hysteresis.
For the first case, the periodic input displacement sig-nal with a loading-unloading shape is defined formally in[137]: x(t) is continuous over the time interval [0,∞) andis periodic with a period T > 0. Furthermore, there exists ascalar T + with 0 < T + < T such that x(t) is a C1 increasingfunction of time on the interval (0, T +) and a C1 decreas-ing function of time on the interval (T +, T ). The quantities
Xmin = x(0) and Xmax = x(T +) > Xmin denote the minimaland the maximal values of the input signal, respectively. Thesignal x(t) is called wave T -periodic and it is illustrated inFig. 3.
The description of the hysteresis loop uses the followinginstrumental functions:
ϕ−σ,n(μ) =
∫ μ
0
du
1 + σ |u|n−1u + (σ − 1)|u|n (40)
is well defined, C∞ and strictly increasing on (−1,1], sothat it is invertible, with inverse ψ−
σ,n.
ϕ+σ,n(μ) =
∫ μ
0
du
1 − σ |u|n−1u + (σ − 1)|u|n (41)
is well defined, C∞ and strictly increasing on [−1,1), sothat it is invertible, with inverse ψ+
σ,n.
ϕσ,n(μ) = ϕ−σ,n(μ) + ϕσ,n(μ)+ (42)
is well defined, C∞ and strictly increasing on (−1,1), sothat it is invertible with inverse ψσ,n.
The analytical description of the hysteresis loop is givenin the following.
Theorem 4 Define the functions ωm and φm for any non-negative integer m as
ωm(τ) = w(mT + τ) for τ ∈ [0, T ], (43)
φm(τ) = κxx(τ) + κwωm(τ) for τ ∈ [0, T ]. (44)
Then, the sequence of functions {φm}m≥0 (resp. {ωm}m≥0)
converges uniformly on the interval [0, T ] to a continuousfunction �BW (resp. w) defined as:
�BW(τ ) = κxx(τ) + κww(τ ) for τ ∈ [0, T ], (45)
w(τ ) = ψ+σ,n
(ϕ+
σ,n
[−ψσ,n(ρ(Xmax − Xmin))]
+ ρ(x(τ) − Xmin)) for τ ∈ [0, T +], (46)
Fig. 3 The T -periodic inputsignals

The Hysteresis Bouc-Wen Model, a Survey 167
w(τ ) = −ψ+σ,n
(ϕ+
σ,n
[−ψσ,n(ρ(Xmax − Xmin))]
− ρ(x(τ) − Xmax)) for τ ∈ [T +, T ]. (47)
Define the time function φBW as φBW(t) = �BW(τ )
where the time t ∈ [0,∞) is written as t = mT + τ for allintegers m = 0,1,2, . . . and all real numbers 0 ≤ τ < T .Theorem 4 means that the time function hysteretic output�BW(x)(t) of the Bouc-Wen model approaches asymptot-ically the T -periodic function φBW(t). The limit cycle isthe graph (x(τ ), �BW(τ )) parameterized by the variable0 ≤ τ ≤ T . Equations (45) and (46) correspond to the load-ing, that is to an increasing input x(τ) with 0 ≤ τ ≤ T +,while (45) and (47) correspond to the unloading, that is to adecreasing input x(τ) with T + ≤ τ ≤ T .
In [241] it is assumed that the exponent n = 1. The hys-teretic part of system is then governed by
z = Ax − (β|x|z + γ x|z|) . (48)
The input signal x(t) is assumed wave T -periodic andthe output is also assumed asymptotically wave T -periodic.Depending on the signs of velocity x and hysteretic restoringforce z, the hysteretic loop is divided into four regions. Ineach region, (48) is integrated leading to
z =⎧⎨⎩
−A−B1 e(β−γ )x
β−γ(β − γ �= 0),
Ax + D1 (β − γ = 0),for x ≤ 0, z ≥ 0,
(49)
z =⎧⎨⎩
−A−B2 e(β+γ )x
β+γ(β + γ �= 0),
Ax + D2 (β + γ = 0),for x ≤ 0, z ≤ 0,
(50)
z =⎧⎨⎩
A−B3 e−(β−γ )x
β−γ(β − γ �= 0),
Ax + D3 (β − γ = 0),for x ≥ 0, z ≤ 0, (51)
z =⎧⎨⎩
A−B4 e−(β+γ )x
β+γ(β + γ �= 0),
Ax + D4 (β + γ = 0),for x ≥ 0, z ≥ 0, (52)
where Bi and Di are integration constants. To obtain thevalues of these constants, it is assumed that the hysteresisloop is continuous, and the continuity condition leads to fourequations for the integration constants. Due to the nonlinear-ity of the equations, these constants are not determined ex-actly. Instead, it is assumed that β = εβ and γ = εγ whereε is a small positive constant. An expansion in power se-ries of ε allows to obtain an approximate description of thehysteresis loop by neglecting the ε3 and higher powers.
In [88] (11) is integrated for D = 1 and n = 2. It isclaimed that
z =√
AB
Btan(√
AB(x + c))
for B < 0, (53)
z =√
AB
Btanh
(√AB(x + c)
)for B > 0, (54)
where B is the coefficient that multiplies z in (11) and c anintegration constant (the expression of c is not given analyt-ically and is supposed to be determined from experiments).This description is incorrect as
√AB cannot be a real num-
ber in (53) since A > 0 and B < 0.In [276], equivalent linearization is used to approximate
the system response under sinusoidal base excitation. Thesystem is described by
mxr + kxr + f (xr , xr ) = −my, (55)
f (xr , xr ) = kdxr + cd xr + αz, (56)
z = Axr − γ |xr zn−1|z − βxr |z|n (57)
where xr is the relative displacement and y = y0 cos(ωt).Equivalent linearization assumes that (55)–(57) are equiva-lent to the single equation
xr + 2ξωnexr + ω2nekxr = −y, (58)
where ξ and ωne are the equivalent system parametersand are determined as a function of the frequency ω. Thismethod assumes that the solution of (55)–(57) is a sine wave.Its phase and amplitude are given as a function of the equiv-alent parameters. Two main disadvantages of this methodare that (1) it is not applicable when the input signal y isnot a sine wave and (2) no formal upper bound on the er-ror between the approximated solution and the exact one isobtained. The size of the error is checked by means of ex-periments.
Also in [276], an averaging method is used to approxi-mate the response to a harmonic excitation. This method as-sumes a sine wave steady-state solution for the variables xr
and z, the amplitude a and phase φ of which is consideredtime-varying. There is a mistake in [276, (35)–(37)] where(35) is obtained assuming a and φ constant, while they aretime-varying in (37).
4 Variation of the Hysteresis Loop with the ModelParameters
Due to the nonlinearity of the Bouc-Wen model, most stud-ies on the influence of the model parameters on the hystere-sis loop shape have been based on numerical simulations.This is the subject of Sect. 4.2. The analytical description ofthe hysteresis loop in [137] allowed a systematic analysis ofthe Bouc-Wen hysteresis cycle in [143]. This is the subjectof Sect. 4.1.

168 M. Ismail et al.
Fig. 4 Methodologies of theanalysis of the variation of w(x)
4.1 Analytical Study of the Influence of the ModelParameters on the Hysteresis Loop
In [143], it is considered that the input displacement signalx(t) is wave T -periodic with Xmin = −Xmax. This allows todefine a normalized input
x(t) = x(t)
Xmax. (59)
The hysteresis part of the limit cycle is derived for load-ing as
w(x) = ψ+σ,n
[ϕ+
σ,n(−ψσ,n(δ)) + δ
2(x + 1)
], (60)
where δ = 2ρXmax. Unloading is not considered in [143] asit is shown that loading and unloading are symmetric.
To analyze the influence of the normalized set of parame-ters (σ , δ and n) on the shape of the limit cycle defined bythe graph (x, w(x)), [143] considers three optics:
1. Analyzing the variation of w(x) as a function of eachparameter (σ , δ and n) separately. This corresponds tostudying the variation of the point Q along the w-axis inFig. 4.
2. Studying the variation of the point S along the x-axis inFig. 4 (that is the width of the hysteresis loop).
3. Defining four regions of the graph (x, w(x)) and studyingthe evolution of the points defining each region. Theseregions are:(a) linear region Rl = [Psl,Plt ],(b) plastic region Rp = [Ptp,Pp],(c) transition region Rt = [Plt ,Ptp],(d) transition region Rs = [Ps,Psl].
Table 2 Variation of the maximal hysteretic output with the normal-ized Bouc-Wen model parameters
ψσ,n(δ) 0 ↑ 1
δ 0 +∞ψσ,n(δ) ψ 1
2 ,n(δ) ↑ ψ+
n (δ)
σ 12 +∞
ψσ,n(δ) ψσ,1(δ) ↑{
δ2 if δ ∈ (0,2],1 if δ > 2
n with σ ≤ 1 1 +∞
ψσ,n(δ) ψσ,1(δ){
δ2 if δ ∈ (0,2],1 if δ > 2
n with σ > 1 1 +∞
The obtained results are summarized in tables where onlythe results obtained analytically are reported. The maximalvalue of the hysteretic output is shown to be ψσ,n(δ). Thevariation of this term with respect to each of the three pa-rameters σ , δ and n is given in Table 2. For example, thesecond row of the table is to be read as follows: the firstcolumn says that the term ψσ,n(δ) is analyzed with respectto the parameter σ . The second column says that the termψσ,n(δ) is increasing (↑) from the value ψ 1
2 ,n(δ) that cor-
responds to σ = 12 to the value ψ+
n (δ) that corresponds toσ = +∞.
Table 3 summarizes the results of the variation of the zeroof the hysteretic output with respect to the model parame-ters, δ, σ and n. The variation of the hysteretic output withthe Bou-Wen normalized model parameters is given in Ta-ble 4.

The Hysteresis Bouc-Wen Model, a Survey 169
A detailed analytical study of the four regions of theBouc-Wen model hysteresis loop is also presented in [143].
4.2 Study of the Variation of the Hysteresis Loopwith the Bouc-Wen Model Parameters by Meansof Numerical Simulations
As explained in Sect. 3, [276] assumes a harmonic approx-imation of the periodic response of a second-order systemcoupled with a Bouc-Wen hysteresis. Based on this approxi-mation, and using numerical simulations, the conclusions ofthe study are the following:
1. When the amplitude of the excitation is small, the fre-quency response of the system is quasilinear hystereticsystem, while the system exhibits a large multivaluedfrequency regions as the amplitude of the excitation in-creases.
2. As the parameter γ varies from negative value to positiveone, the system frequency response curves gradually vary
Table 3 Variation of the hysteretic zero x◦ with the normalized Bouc-Wen model parameters
x◦ 0 ↓ −1
δ 0 +∞x◦ 2
δψ 1
2 ,n(δ) − 1 ↓ −1
σ 12 +∞
x◦ 2δϕ−
σ,1(ψσ,1(δ)) − 1 ↑{
0 if δ ∈ (0,2],2δ
− 1 if δ > 2
n 1 +∞
from hardening character to a quasilinear character andthen to soft character.
3. When β is increased, the response amplitude is de-creased.
4. When A is increased, the system natural frequency is in-creased.
5. When α is increased, the damping force is increased, thehysteresis force loop will become slim and the dampingforce will be more similar to viscous damping force, inaddition, large α will make the system more like linearsystem.
The study in [333] reports that there are five kinds of hys-teresis loops with physical meaning depending on the re-spective signs of the quantities β + γ and β − γ . Hardeningand softening behaviors are shown to be related to the signof β + γ . It is also noted that the parameter A controls theslope of the hysteresis loop at z = 0. Using numerical simu-lations it is shown that the parameter n governs the smooth-ness of the transition from linear to nonlinear range. It isalso observed that an increase of the parameter A increasesthe resonant frequency and reduces the resonant peak. More-over, it is observed that the increase of the parameters A andn makes the hysteresis loop narrower.
5 Interpretation of the Model Parameters
In this section, the interpretation of the standard and normal-ized parameters of the Bouc-Wen model is discussed.
Table 4 Variation of the hysteretic output w(x) with the normalized Bouc-Wen model parameters
w(x) with x ≥ 0 0 ↑ 1
δ 0 +∞w(x) with −1 < x < 0 0 ↓ w(x)δ=δ∗ ↑ 1
δ 0 δ∗ = ϕσ,n
(n
√−x
σ (x+1)−x
)+∞
w(x) with x = −1 0 ↓ −1
δ 0 +∞w(x) with x ≥ 2
δψ 1
2 ,n(δ) − 1 w(x)
σ= 12
↑ ψ+n
(δ2 (x + 1)
)σ 1
2 +∞w(x) with x < 2
δψ 1
2 ,n(δ) − 1 w(x)
σ= 12
ψ+n
(δ2 (x + 1)
)σ 1
2 +∞
w(x) w(x)n=1
⎧⎪⎪⎨⎪⎪⎩
if δ ∈ (0,2] δ2 x
if δ > 2
{−1 + δ
2 (x + 1) for − 1 ≤ x < 4δ
− 1
1 for 4δ
− 1 ≤ x ≤ 1
n 1 +∞

170 M. Ismail et al.
5.1 Interpretation of the Standard Bouc-Wen ModelParameters
The parameters α, A, β , γ and n play the role of governingand controlling the scale and general shape of the hystere-sis loop. Due to the lack of an analytical expression of thehysteresis loop, most works addressing this issue have usednumerical simulation to understand the influence of theseparameters [47, 187, 202, 241, 276, 333]. The way thesesimulations have been done is by fixing four parameters andvarying one (the free parameter). As shown in Sect. 4.1, thismethodology is hampered by the following facts:
1. The variation of the hysteresis loop with the free parame-ter depends on the precise values of the fixed parameters.
2. Any given quantity related to the hysteresis loop (likemaximum value, width, etc.) does not depend on a sin-gle parameter but rather on the whole set of parameters.
As a consequence, most of the results obtained in the lit-erature are either incomplete or incorrect. A more analyticapproach is given in [143] using the normalized parametersand its results are given in the following section.
5.2 Interpretation of the Normalized Bouc-Wen ModelParameters
The parameters of the normalized form of the model are in-terpreted as follows. ρ is the slope of the linear zone forXmax = 1, or the inverse of the apparent yield point of thenonlinear component of the Bouc-Wen model. The Para-meter δ can be seen as a measure for the ductility of themodel, while the parameter σ distinguishes the softeningor the hardening behaviors of the hysteretic component andtherefore the consistency with the laws of Thermodynam-ics. The parameter n characterizes the transition from linearto plastic behavior along the axis of ordinates in the map(x, w(x)).
6 The Bouc-Wen Model Parameter Identification
Identifying the Bouc-Wen model parameters consists inproposing a signal input (or several signal inputs) and anidentification algorithm that uses the measured output ofthe model along with that input to determine the unknownmodel parameters. This problem has stirred a lot of re-search effort due to its difficulty being nonlinear and non-differentiable. Some identification methods have been pro-posed with a rigorous analysis of the convergence of the pa-rameters to their true values, while others relied on numeri-cal simulations and experimentation. In the next, we give anoverview of these methods.
6.1 Least-Squares Based Identification
Reference [200] presents a three-stage identification algo-rithm that is a combination of sequential regression analysis,least-squares analysis and/or Gauss-Newton method alongwith the extended Kalman filtering technique.
In the first stage of identification, assuming equivalentlinear system at each time interval and by using the sequen-tial regression analysis, the system stiffness and dampingare identified by means of the following recursive formu-lation:
ak+1 = ak +PkHTk+1(1+Hk+1PkHT
k+1)−1 · (qk+1 −Hk+1a)
(61)
where qk+1 = the actual (k+1) measurement, P−1k = HT
k Hk
and Hk+1ak is the estimate of this measurement, while k =time step; a = [c1, c2, . . . , cN , k1, k2, . . . , kN ]T and N = de-grees of freedom.
In the second identification stage, a fixed n = 1 is as-sumed, and the model parameters (A, β , γ ) are identifiedusing the least-squares method proposed in [302] for dif-ferent α values and through minimizing the following errorfunction:
E =m∑
i=1
[zi − AI1i + βI2i + γ I3i
]2 where
I1i = x, I2i = |x||zi |n−1zi and I3i = |x||zi |n. (62)
In the third stage of identification, the extended Kalmanfilter technique is used to obtain better identification resultsby using the results from the second stage as an initial guessto the third stage to speed convergence.
Paper [173] describes an iterative least squares procedurebased on a modified Gauss-Newton approach to perform theparameter identification of an extended version of the Bouc-Wen model that accounts for strength and stiffness degrada-tion by [18].
References [55, 289] present an on-line identificationmethod based on a least-squares adaptive law with the for-getting factor [147]. For an unknown mass m, a Bouc-Wenhysteresis element model with additional polynomial-typenonlinear terms, is used to investigate the effects of persis-tence of excitation and of under- and overparameterization.This model form is given as
z = mx + kx + cx + dx3
−∫ t
0(1/η)
[ν(β|x||z|n−1z − γ x|z|n)]dt (63)
where d is the cubic term parameter and c the linear damp-ing parameter, while the stiffness parameter k replaces

The Hysteresis Bouc-Wen Model, a Survey 171
(1/η)A in the common model degradation form. In this case,x and z are supposed to be available to measurement whilex and x are obtained by integration.
The filtered signals z in the identification process aregiven by
z = θ∗T � (64)
where
θ∗ = [m,k, c, d,−(1/η)a1νβ, (1/η)a1νγ,
− (1/η)a2νβ, . . .]T (65)
and
� =[
sx
(s + α),
sx
(s + α),
sx
(s + α)
sx3
(s + α),
|x||z|0z(s + α)
,x|z|
(s + α)
|x||z|z(s + α)
,|x||z|2(s + α)
, . . .
]T
. (66)
To account for variable gain, a modified least-squaresadaptive law with forgetting factor [147] is used.
Paper [196] presents an adaptive on-line identificationmethodology with a variable trace method to adjust theadaptation gain matrix.
In [202], a linear parameterized estimator is proposed forthe on-line estimation of the hysteretic Bouc-Wen modelwith unknown coefficients (including the parameter n) writ-ten as
z = Ax +N∑
i=1
an
[β|x||z|i−1z + γ x|z|i], (67)
where N is a known upper bound on n. A discrete-time formof (67) is defined as follows:
z(k) = z(k − 1) + �tAx(k − 1)
+ �t
N∑i=1
ai
[β|x(k − 1)||z(k − 1)|i−1z(k − 1)
+ γ x(k − 1)|z(k − 1)|i], (68)
where the coefficients ai are 0 or 1. This discrete time modelgives rise to the following discrete-time linearly parameter-ized estimator:
z(k) = z(k − 1) + θ0(k)x(k − 1)
+N∑
i=1
[θ2i−1(k)|x(k − 1)||z(k − 1)|i−1z(k − 1)
+ θ2i (k)x(k − 1)|z(k − 1)|i], (69)
where the coefficients θi , i = 0, . . . ,2N are estimates ateach time tk of the corresponding coefficients shown in (68).Equation (69) indicates a linear parameterized form with re-spect to θi , i = 0, . . . ,2N . Now set
θ = [θ0, θ1, θ2, . . . , θ2N ]T (70)
where θi is a function of �t and time-dependent model pa-rameters. Also define
φ(k − 1) = [x(k − 1)|x(k − 1)||z(k − 1)|0z(k − 1)
× x(k − 1)|z(k − 1)|1|x(k − 1)||z(k − 1)|1× z(k − 1)
× x(k − 1)|z(k − 1)|2 · · · |x(k − 1)|× |z(k − 1)|N−1z(k − 1)x(k − 1)|z(k − 1)|N ].
(71)
Then the restoring force at time t can be expressed as
z(k) = z(k − 1) + φT (k − 1)θ. (72)
Based on the data collected from performance test, least-square method is used to estimate the model parameters, θi ,i = 0, . . . ,2N , for each discrete frequency where N = 5 waschosen.
In [278], the mechanical properties of low yield strengthsteel are studied to develop a new device for added damp-ing, stiffness and seismic resistance of rhombic low yieldstrength steel plate. The Bouc-Wen model is used in thefollowing form to approximate that mechanical behav-ior:
z = Ax − η(β|x||z|n−1 + γ x|z|n), (73)
η =(
�y
�y0
)−n
, (74)
�y =(
A
β + γ
)1/n
, (75)
where �y and �y0 are the present and the nominal yieldingdisplacements, respectively.
A discrete form of (73) is rearranged as
�zi = Ay1i − βy2i − γy3i , where (76)
y1i = �xi, and (77)
y2i = (β sgn (xi)|zi |n−1zi
)�xi, and (78)
y3i = (γ |zi |n
)�xi. (79)
Then, the optimal coefficients of A, β and γ can be acquiredby the fitting method of least squares through solving the

172 M. Ismail et al.
following equation⎡⎢⎣∑
y21i −∑
y1i y2i −∑y1i y3i∑
y22i
∑y2i y3i
sym.∑
y23i
⎤⎥⎦⎧⎨⎩
A
β
γ
⎫⎬⎭
=
⎧⎪⎨⎪⎩
∑y1i �zi
−∑y2i �zi
−∑y3i �zi
⎫⎪⎬⎪⎭ . (80)
6.2 Kalman Filter Based Identification
In [195] it is assumed that n = 1 and an extended Kalmanfilter is used to identify the rest of the parameters. A pro-cedure for nonlinear system identification based on the ex-tended Kalman filter is applied to soils under strong motionrecords [191]. The ground is modeled as 3DOFs hystereticstructure and the Bouc-Wen model is used in characterizingthe nonlinear backbone curve of soils. Considering a soil tobe purely hysteretic, the Bouc-Wen model of soil is writtenas
τ = Aγs − β|γs ||τ |n−1τ − γ γs |τ |n, (81)
where τ = shear stress; γs = shear strain; A = initial shearstress modulus. For non-degrading soils, using β = γ en-sures that the backbone curve is convex and symmetric aboutthe origin in this study. With β = γ the time-rate form of thebackbone curve is obtained from (81) as
τ = Aγs − 2βγs |τ |n, (82)
where A, β and n are the parameters to be identified.Identification is first carried out based on soil hysteresis
loops, using a weighted global iteration scheme for parame-ter identification consisting of the following steps:
1. Start the first run with estimates of the initial conditionX(0|0) and its error covariance matrix, P(0|0).
2. Carry out the extended Kalman filtering of the data andobtain at the end of the analysis the updated estimates ofX(n|n) and P(n|n).
3. For the next iteration, use the obtained parameter,Xp(n|n), as the new initial estimate, and scale the sub-matrix, Ppp(n|n), with a weighting factor w. The esti-mates of the initial conditions Xs(0|0) and Pss(0|0) arenot modified in the iteration. For instance, after i itera-tions, the new initial estimates for the i + 1 iteration is asfollows:
Xi+1(0|0) =[
X0s (0|0)
Xip(n|n)
], (83)
Pi+1(0|0) =[
P0ss(0|0) 0
0 w · Pipp(n|n)
]. (84)
4. Continue the analysis until the parameters can no longerbe improved or a local minimum identification error isreached.
Reference [361] presents three algorithms based uponthe simplex [24], extended Kalman filter [217], and gen-eralized reduced gradient methods. The objective is to es-timate the parameters of hysteresis for different classes ofinelastic structures using the generalized Bouc-Wen modelthat accounts for degradation and pinching [17]. This modelform contains 13 parameters to be identified and in whichthe restoring force is expressed as
Fr = αkx + (1 − α)kz, (85)
z = h(z)
{Ax − ν(β|x||z|n−1z + γ x|z|n)
η
}, (86)
in which A, β , γ , n are simple loop parameters while ν,η are functions containing additional loop parameters as afunction of the energy dissipated through hysteresis.
In [192], an adaptive on-line identification algorithm isproposed for parametric and non-parametric identificationof structural models, and is applied to a generalized Bouc-Wen model. The proposed identification methodology, a re-cursive least-square (Kalman filter) based algorithm, up-grades the adaptation gain matrix using an adaptive forget-ting factor that is expressed as the ratio between the mini-mum value of the diagonal elements of the adaptation gainmatrix and a set of pre-defined threshold values. This ap-proach requires only acceleration measurements.
6.3 Genetic Algorithm Based Identification
In [120] a genetic based identification algorithm is proposed.The reproduction procedure adopts the roulette wheel se-lection and the method of crossover and uniform mutation[3, 125].
A modification to the standard Bouc-Wen model is pro-posed in [175] to account for non-symmetrical hysteresis ex-hibited by an MR damper
f = cx + kx + αz − f0, (87)
z = (A − (γ + β sgn(zx)|z|n))(x − μ sgn(x)), (88)
where f0 is the initial damper displacement contributing tothe force offset and μ is the scale factor for the velocity ad-justment.
Then, the model parameters are identified by a geneticalgorithm that is improved here by
1. Removing the selection stage (it is absorbed into thecrossover and mutation operations).
2. Imposing a termination criterion on the basis of statisti-cal tests which guarantees the quality of a near-optimalsolution.

The Hysteresis Bouc-Wen Model, a Survey 173
The parameters to be defined are c, k, f0, α, A, β , γ , n
and, μ. Hence, the chromosome becomes
Ci = {ci, ki, f0,i , αi,Ai, βi, γi, ni,μi},i = 1, . . . ,N, N = 50. (89)
The fitness function is designed from the averaged sumof normalized square error between the simulated and ex-perimental data. That is
ei = 1
n
n∑i=1
|vi |(
f simi − f
expi
�f
)2
(90)
where n = the number of data points, vi ∈ [−1,1] is thenormalized velocity and �f = fmax − fmin is the differencein experimental force data.
Reference [176] proposes an identification method basedon differential evolution using simulated noise-free data andexperimental data obtained from a nuclear power plant. TheBouc-Wen model parameter n is kept constant to the value 2.The used objective function is the mean square error (MSE)which is cast in the discrete normalized form as
MSE = 100
nσ 2x
n∑i=n
(x(t) − x(t |P )
)2, (91)
where σ 2x = the variance of the measured output and n =
the number of points in the measured output; x and x = themeasured and predicted time history, respectively; and P =the parameter vector.
The optimization of the objective function is quoted from[263] and stated as obtaining the parameter vector P whichminimizes the MSE. The parameter vector is subjected to theconstraint
P min ≤ P ≤ P max. (92)
The so-called direct search optimization methods do notusually provide a mechanism to restrict the parameters in therange defined by inequality (92); neither does the differentialevolution. However, an unconstrained optimization methodcan be transformed to a constrained one using the conceptof the penalty function. This function determines a penaltyto be added to the value of the MSE any time any parameterexceeds the range limits. The penalty function selected forthis case is given by
Penalty(Pi) =
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
20((Pi(min) − Pi)/P(min))2
for Pi < Pi(min),
0
for Pi(min) < Pi < Pi(max),
20((Pi(max) − Pi)2/Pi(max))
2
for Pi > Pi(max).
(93)
In [209], a population-search algorithm is proposed toestimate the 13 parameters of the generalized Bouc-Wenmodel. With a given load-displacement trace as input, theoptimization problem can be stated as the determination ofthe parameter vector
p = (A,α,β, γ,n, δν, δη, ζs, q,p,ψ, δψ,λ) (94)
such that the objective function
gN(p) = 1
N
N∑j=1
[x(tj ) − x(tj |p)]2 (95)
is minimized, where N = the number of data points used.Minimization of the objective function is subject to the con-straint that all parameters in p with the exception of γ arepositive.
6.4 Gauss-Newton Iterative Based Identification
In [346], a method of estimating the parameters of hystereticBouc-Wen model on the basis of possibly noise corruptedinput-output data is proposed. The system model is
x + ax + bx + z = f, (96)
z = Ax − β|x||z|n−1z − γ x|z|n. (97)
The observations are assumed to be of the form
y = x + ε (98)
where (i) ε is a zero mean Gaussian white noise with vari-ance σ 2
e , (ii) the input f is zero mean Gaussian white noiseand can be measured noise free, and further the input f isindependent of the observation noise, (iii) the initial condi-tions are known and are set to zero for simplicity. Hence,the integrated mean squared error is selected for minimiza-tion as
Q = 1
T
∫ T
0ε2dt = 1
T
∫ T
0
[y − x
]2dt (99)
with respect to the parameters a, b, A, β , γ , n. Equation (99)is differentiated w.r.t. each parameter to get a system of nor-mal equations
Q = 1
T
∫ T
0[y − x](∂x/∂θi)dt = 0, i = 1,2, . . . ,6 (100)
that is solved using the Gauss Newton iterative procedure,where θ = [a b A β γ n].
In [187], Gauss-Newton iterations are used as a methodof estimating the parameters of hysteretic system with slipon the basis of input-output data. The model used is called

174 M. Ismail et al.
slip-lock [17] as an extended version of the Bouc-Wenmodel, and describes the pinching of hysteresis loops:
x + ax + bx + z = p(t), (101)
z = Ax1 − β|x1||z|n−1z − γ x1|z|n, (102)
x1 =√
2
π
s
σexp
[− z2
2σ 2
]z, (103)
x = x1 + x2, (104)
s = δsE(t), (105)
where s = δsE is the slip, δs is a constant, E is the systemenergy dissipation; and σ = the Gaussian density function.Then, the parameters to be identified are a, b, A, β , γ , n, δs
and σ the elements of the column vector θ .The basic philosophy of the identification method begins
with the selection of the integrated mean squared error be-tween the actual observation of acceleration ˆx(t) and themodel response x(t) as a cost function for minimization, i.e.,
minimize Q = 1
T
∫ T
0
[ ˆx(t) − x(t)]2
dt (106)
with the parameters a, b, A, β , γ , n, δs and σ , where T =the sampling time.
Since x(t) is non-linear function in all the parameters,(106) can be solved iteratively. The Gauss-Newton iterativeprocedure is used as:
θm+1 = θm − H−1m ∇Qm, (107)
where Hm = the Hessian matrix of Q, but only the first orderderivative is used. ∇Qm = the Jacobian vector of Q, and thesubscript m denotes the computation of the matrix Hm or thevector ∇Qm with respect to the estimate of the parametervector θ at the mth iteration.
A three-stage procedure is suggested for carrying out theiteration:
– In the first stage, the parameters n and σ are kept fixedand Q is minimized over the six parameters a, b, A, β , γ ,and δs .
– In the second stage, the parameter σ is kept fixed and Q
is minimized over the seven parameters a, b, A, β , γ , n,and δs .
– In the third stage, Q is minimized over all the eight para-meters.
6.5 Bootstrap Filter Based Identification
In [186], a parametric identification method is proposed foran extended form of the Bouc-Wen model that accounts forstick-slip phenomenon [17]. The method uses the bootstrapfilter, a filtering method based on Bayesian state estimation
and Monte Carlo method. Also, a method to decide the ini-tial estimates of the parameters is suggested to obtain stablesolutions as well as their fast convergence to the optimal val-ues.
6.6 Identification Using Periodic Signals
Reference [235] proposes a frequency domain parametricidentification method of non-linear hysteretic isolators de-scribed by
mx(t) + r(t) = F(t), (108)
r(t) = kx(t) + z(t), (109)
z = Ax − β|x||z|n−1z − γ x|z|n. (110)
Assuming a known mass m, the hysteretic restoring forcegoverned by (109) is identified by taking measurements ofboth the external excitation F(t) and the displacement re-sponse x(t) (or the acceleration x alternatively). The vectorof model parameters to be identified is {y} = {k α β γ n}T .
The signals F(t) and x(t) are periodic and are expressedas
F(t) = F0
2+
N∑j=1
Fj cos jωt +N∑
j=1
F ∗j sin jωt, (111)
x(t) = a0
2+
N∑j=1
aj cos jωt +N∑
j=1
a∗j sin jωt, (112)
where
{F} = {F0 F1 F2 · · · FN F ∗1 F ∗
2 · · · F ∗N }T , (113)
{a} = {a0 a1 a2 · · · aN a∗1 a∗
2 · · · a∗N }T , (114)
ω is the vibration frequency and N is the order number ofharmonics truncated. Applying the Galerkin (harmonic bal-ance) method into the time domain determining function
D(t) = F − m...x − x{k + A − [β sgn(x)
× sgn(F − kx − mx) + y]|F − kx − mx|n} (115)
achieves
d(y) = 0 (116)
where {d(y)} is the residual of the equations and a mini-mization problem in terms of non-linear least squares arisesas
ming(y) = ‖d(y)‖2 = dT d. (117)
This non-linear least squares optimal problem is solvediteratively by the Levenberg-Marquardt algorithm.

The Hysteresis Bouc-Wen Model, a Survey 175
In [136, 138], an identification method for the normal-ized Bouc-Wen model is proposed. Using the analytical de-scription of the hysteresis loop developed in [137], an algo-rithm is proposed along with its analytical proof. It consistsin exciting the Bouc-Wen model with two periodic signalswith a loading-unloading shape (wave periodic) which givesrise asymptotically to a hysteretic periodic response. The ob-tained two limit cycles are then used as input to determineexactly the unknown parameters. The identification method-ology is summarized in the following steps:
– STEP 1. Excite the Bouc-Wen model with a wave peri-odic signal x(t). After a transient, the output �BW(t) willhave a steady state as �BW(t). Since both the input andthe output are accessible to measurements, the relation(x, �BW(x)) is known.
– STEP 2. Choose a nonzero constant q and excite theBouc-Wen model with the input x1(t) = x(t) + q . Af-ter a transient, the output �BW,1(t) will have a steadystate �BW,1(t). Since both the input and the output areaccessible to measurements, the relation (x1, �BW,1(x1))
is known.– STEP 3. Compute the coefficient κx as
κx = �BW,1(x + q) − �BW(x)
q. (118)
– STEP 4. Compute the function θ(x) as
κww(x) = �BW(x) − κxx � θ(x). (119)
– STEP 5. Determine the unique zero of the function θ(x),that is the quantity x∗ such that θ(x∗) = 0.
– STEP 6. Compute the parameter a as
a =(
dθ(x)
dx
)x=x∗
. (120)
– STEP 7. Choose two design constants x∗1 and x∗2 suchthat x∗2 > x∗1 > x∗. Then compute parameters n and b
using the following equations
n =log(
(dθ(x)dx
)x=x∗2−a
(dθ(x)dx
)x=x∗1−a)
log(θ(x∗2)θ(x∗1)
), (121)
where log(.) denotes the natural logarithm
b = a − (dθ(x)dx
)x=x∗2
θ(x∗2)n. (122)
– STEP 8. Compute the parameters κw and ρ as
κw = n
√a
b, (123)
ρ = a
κw
. (124)
– STEP 9. Compute the function w(x) using
w(x) = θ(x)
κw
. (125)
– STEP 10. Choose a design constant x∗3 such that x∗3 <
x∗. Then compute the parameter σ as follows:
σ = 1
2
( (dw(x)
dx)x=x∗3ρ
− 1
(−w(x∗3))n+ 1
). (126)
6.7 Simplex Method Based Identification
Reference [262] presents a two-step system identificationapproach that does not require the semiactive device to betested apart from the structure, but rather mounted into it. Itconsists in (i) identification of a model for the primary struc-ture without the semiactive damper attached; (ii) installationof the semiactive damper in the structure and simultaneousidentification of the remaining parameters for the primarystructure and of a model for the semiactive control device.The simplex algorithm is employed to optimize the dynam-ical parameters.
In [115], the simplex and Levenberg-Marquardt opti-mization methods are used to fit experimental data withcurves given by a Bouc-Wen model in a dynamic suspen-sion modeling problem.
6.8 Support Vector Regression Based Identification
Reference [363] proposes a non-linear structural identifica-tion scheme to identify the Bouc-Wen type structures. It pro-duces the unknown power parameter n of the model by themodel selection strategy, transforms the non-linear differ-ential equation into a linear problem through the high or-der Adam Moulton implicit equation [275], and utilizes thesupport vector regression data processing technique to solvenon-linear structural parameters.
6.9 Constrained Nonlinear Optimization BasedIdentification
Paper [273] uses the Bouc-Wen model to describe mag-netorheological dampers, and proposes a methodology ofidentification to determine the model parameters. The valuen = 2 is supposed and the model estimation problem is re-duced to an optimization problem where the performanceindex is a classical normalized L2-norm of the output fittingerror.
In [320, 336] and [349] a constrained nonlinear optimiza-tion is used for identification purpose.

176 M. Ismail et al.
6.10 Non-Parametric Identification
In [220], the Bouc-Wen nonlinear hysteresis term is approx-imated by a power series expansion of suitable basis func-tions, then the coefficients of the functions are determinedusing standard least-squares methods.
In [199], a method relying on deconvolution to estimatethe non-linear hysteretic force z from experimental recordsis used.
7 Modeling Using the Bouc-Wen Model
The Bouc-Wen model has been extensively adopted in manyengineering fields to represent the hysteresis behavior ofsome nonlinear components. In this section, we present anoverview of the use of this model.
7.1 Magnetorheological Dampers
Magnetorheological (MR) dampers are hysteretic devicesthat employ rheological fluids to modify their mechanicalproperties. The stiffness and damping characteristics of theMR damper change when the rheological fluid is exposedto a magnetic field. The Bouc-Wen model has been used todescribe the hysteresis behavior of these devices.
Reference [90] proposes a non-linear model for MRdamper which incorporates the current (I ), amplitude andfrequency excitation (ω) as input variables. In this sense, themodified Bouc-Wen model is reformulated as follows:
F(x(τ), x(τ ), I,ω, x,0 ≤ τ ≤ t; t)= (
d1ωd2)(
d3ωd4max
)[c0(I )x + k0(I )x + α(I)z], (127a)
z(I ) = A(I)x + β(I)|x||z|n−1z − γ x|z|n, (127b)
c0(I ) = c1 + c2(1 − e−c3(I−Ic)
)for I > Ic, (127c)
c0(I ) = c4 + c4 − c1
Ic
I for I ≤ Ic, (127d)
k0(I ) = k1 + k2 I, (127e)
α(I) = α1 + α2(1 − e−α3(I−Ic)
)for I > Ic, (127f)
α0(I ) = α1 + α4 − α1
Ic
I for I ≤ Ic, (127g)
β(I) = β1 − β2 I, (127h)
Fz0(I ) = Fz01 + Fz02(1 − e−Fz03(I−Ic)
)for I > Ic, (127i)
Fz0(I ) = Fz04 + Fz04 − Fz01
Ic
I for I ≤ Ic, (127j)
where A and γ assumed to be one and zero, respectively,and the 16 constant parameters c1, c2, c3, c4, k1, k2, α1, α2,α3, α4, γ1, γ2, Fz01, Fz02, Fz03 and Fz04 relate the character-istic shape parameters to current excitation. Ic is the critical
current in which the characteristic parameters change theirlinear behavior in low velocity to exponential behavior inhigh velocity.
Paper [240] presents a simple mechanical model consist-ing of a Bouc-Wen element in parallel with a viscous damper(with damping coefficient c0). It was used and verified to ac-curately predict the behavior of a prototype shear-mode MRdamper over a wide of range of inputs by. The force f ex-erted by this model is
f = c0 x + α z (128)
where z is given by (139). Device model parameters α andc0 are considered dependent on the control voltage V as fol-lows:
α = α(V ) = αa + αb V, (129)
c0 = c0(V ) = c0a + c0b V . (130)
A Bouc-Wen hysteretic voltage-dependent model is de-veloped from performance tests of a 3 kN MR damper de-vice that is incorporated to an isolated structure subjectedto earthquake excitations in order to reduce its responseby [202]. The restoring force F(t) is expressed as
F(t) = C(V )x + z, (131)
z = Ax + β|x||z|n−1z + γ x|z|n (132)
where C(V ) is a voltage-dependent parameter.In [299], an extension to the standard Bouc-Wen model is
proposed to account for the rolloff that appears in the force-displacement relationship at small velocities. In this modi-fied model, the force is given by
F = αz + c0(x − y) + k0(x − y) + k1(x − x0)
= c1y + k1(x − x0) (133)
where z and y are governed by
z = −β|x − y| z |z|n−1 − γ (x − y)|z|n + A(x − y), (134)
y = 1
c0 + c1
(αz + c0x + k0(x − y)
)(135)
in which k1 = accumulator stiffness; c0 = viscous dampingat large velocities; c1 = viscous damping for force rolloff atlow velocities; k0 = stiffness at large velocities; and x0 =initial displacement of spring k1. This modification is usedby [343] to reproduce the hysteresis loop of a large scale MRdamper.
In [175], a non-symmetrical Bouc-Wen model for MRfluid dampers is presented. The adopted strategy is to adjustthe velocity value in calculating the hysteretic variable but

The Hysteresis Bouc-Wen Model, a Survey 177
retain the general expression for the Bouc-Wen model. Theresulting non-symmetrical Bouc-Wen model is
z = (A − (
γ + β sgn[z(x − μ sgn(x))])|z|n)× (x − μ sgn(x)) (136)
where μ is the scale factor for the adjustment, provided that
μ sgn(x) → 0∣∣x≈0. (137)
The overall effect is to shift the hysteresis switching inthe vicinity of zero velocity while maintaining the hystereticshape in the rest of the hysteresis loop.
Paper [344] presents a phenomenological dynamic modelbased on the Bouc-Wen model to estimate large-scale MRdamper behavior under dynamic loading. This model ac-commodates the MR fluid stiction phenomenon, as well asfluid inertial and shear thinning effects. Moreover, the pro-posed model is supposed to be more effective in describingthe force rolloff in the low velocity region, force overshootswhen velocity changes in sign, and two clockwise hysteresisloops at the velocity extremes. The damper force is given by
f − f0 = mx + c(x)x + kx + αz, (138)
z = Ax − β|x||z|n−1z − γ x|z|n. (139)
In this model, m = equivalent mass which representsthe MR fluid stiction phenomenon and inertial effect; k =accumulator stiffness and MR fluid compressibility; f0 =damper friction force due to seals and measurement bias;and c(x) = post-yield plastic damping coefficient which isdefined as a monodecreasing function with respect to ab-solute velocity |x| to describe the MR fluid shear thinningeffect which results in the force rolloff of the damper resist-ing force in the low velocity region. The post-yield dampingcoefficient is assumed to have the form
c(x) = a1 e−(a2|x|)p (140)
where a1, a2 and p = positive constants.In [349] and [240], a Bouc-Wen based phenomenological
model of a shear-mode MR damper is presented while [135]proposes a simplified version of the Bouc-Wen model forMR dampers called the Dahl model.
7.2 Structural Elements
The Bouc-Wen model has been used to simulate a variety ofhysteretic structural elements behaviors. For example, andbased on the modification of the Bouc-Wen-Baber-Noorimodel, general features of the hysteretic behavior of woodjoints (with yielding plates or yielding nails or yieldingbolts) and structural systems were characterized by [104].
The model accounts for degradation and pinching in theform:
z = h(z)
{Ax − ν(β|x||z|n−1z + γ x|z|n)
η
}(141)
where ν and η are the strength and stiffness degradation re-spectively.
In [243], the standard form of the model is incorporatesinto ABACUS to investigate the dynamic frictional contactof a bolted joint under harmonic loading.
Reference [321] investigates the effects of connectionfailure on structural response of steel buildings under earth-quakes, a smooth connection-fracture hysteresis modelbased on the Bouc-Wen model. The form of the model thataccounts for degradation is extended to represent asymmet-ric smooth hysteresis in which the ultimate positive and neg-ative restoring forces are not equal. This extensions is for-mulated as
z = x
η
(A − ν|z|n[β sgn(xz) + γ + φ(sgn(z) + sgn(x))
])
(142)
in which φ is an additional parameter accounting for theasymmetric yielding behavior. The hysteresis loops shiftdownward or upward depending on the sign (positive or neg-ative) of the parameter φ.
The inelastic behavior of connections is described in[190], taking into account capacity uncertainties of connec-tions.
The work in [23] utilizes the Bouc-Wen model to de-scribe hysteretic dampers that interconnect two adjacentstructures subjected to seismic excitation.
Paper [19] studies the nonlinear response of single pilesunder lateral inertial and seismic loads using (144) as amacroscopic model. This model consists of distributed non-linear springs (described by the Bouc-Wen model), com-bined with a distributed viscous (frequency dependent)dashpots, placed in parallel, and describes the lateral soilreaction. The variable y represents the value of pile deflec-tion that indicates yielding in the spring.
7.3 Base Isolation Devices
The base isolation devices aim to absorb or reflect the earth-quake input energy to the structure to keep linear structuralvibration. Many devices are strongly nonlinear showing dif-ferent hysteretic behaviors. The Bouc-Wen model has beenintroduced for its intrinsic ability in reproducing a widerange of real devices behavior.
A combined energy dissipation system was developed by[204]. In this system lead rubber dampers and their paral-lel connection with oil dampers are used in the braces of

178 M. Ismail et al.
a structural frame. The restoring force characteristics of thelead rubber damper is simulated by the Bouc-Wen hystereticmodel having the following form:
F = αFy
dy
x + (1 − α)Fyz, (143)
z = 1
dy
(Ax − β|x||z|n−1z − γ x|z|n) (144)
where Fy and dy are the yielding force and yielding dis-placement, respectively.
The same form of (144) was also used to control the evo-lutionary parameter z by [76] to model the friction of Teflon-steel interfaces in sliding-based seismic isolation devices.The frictional force is given by
Ff = μs W z (145)
where μs is the coefficient of sliding friction, W is the struc-tural weight, z takes values ±1 during sliding (yielding) andduring sticking (elastic behavior), the absolute value of z
is less than unity. Equation (144) was also used by [83] tomodel the dissipated energy by the wire rope isolators forbuilding equipments, which have found numerous applica-tion in the shock and vibration isolation in military and in-dustrial fields.
Because of its versatility and suitability for direct closedform stochastic linearization, the Bouc-Wen model was em-ployed within a method of random vibration analysis of baseisolated shear structures with hysteretic dampers by [75] and[214] to simulate the load deformation path of the hystereticdevices.
In [216], a parametric stochastic analysis of an isolatedbridge is proposed with the aim to assess isolation perfor-mance and to investigate effects of energetic influence onprotection efficiency. Isolated bridge (piers and seismic iso-lators) is described by a simple two degree of freedom Bouc-Wen hysteretic model. Engineering mechanical quantitieswere related to the analytical parameters of the model in or-der to model real structural elements. Accordingly, the evo-lutionary parameter z is given by
z = x
[1 − 1
2
(z
xy
)n
(1 + sgn(zx))
], (146)
xy =(
1
β + γ
)1/n
, the limit elastic displacement (147)
assuming A = 1. It was reported that, by adopting the Bouc-Wen and by using appropriate parameters for this model, itbecomes able to suitably characterize an ordinary buildingand the considered base isolators.
7.4 Mechanical Systems
The Bouc-Wen model provides useful predictions of the re-sponses of suspension seats of the off-road machines to tran-sient inputs [115]. It is concluded that the Bouc-Wen modelcan provide a useful simulation of an existing seat and as-sist the optimization of an individual component in the seat,without measuring the dynamic properties of components inthe seat except those of the component being optimized. Theused form of the model is
FBW = (k − ks)x − β|x|FBW − γ x|FBW | (148)
in which k and ks are positive stiffnesses, x is the relativevertical displacement, while β and γ give the effect of hys-teresis, and FBW is the Bouc-Wen force that combines all thenon-linear effects due to the different seat components.
Reference [293] investigates the interaction effect be-tween electrical substation equipment (an important ele-ment within the power transmission lifeline) items con-nected by nonlinear rigid bus conductors. The symmetrichysteretic behaviors are described by the original Bouc-Wenmodel while the components having asymmetric hysteresisare modeled by a modified version of the Bouc-Wen modelfor highly asymmetric hysteresis loops with constant para-meters. The auxiliary differential equation of this modifiedmodel is given as
z = x[A − |z|nψ(x, x, z)
], (149)
ψ = β1 sgn(xz) + β2 sgn(xx) + β3 sgn(xz)
+ β4 sgn(x) + β5 sgn(z) + β6 sgn(x) (150)
in which βi, i = 1,2, . . . ,6, are parameters controlling theshape of the hysteresis loop and x is the relative displace-ment.
To predict correctly the lateral vibration of an elevatorin motion by [324], it was necessary to deal with a rate-dependent stick-slip phenomenon which may occur at arubber-to-metal interface which is observed at the interfacebetween the guide roller and the rail of a typical elevatorin motion. To consider the rate-dependent nonlinearity, themth-power velocity damping model c|x|m sgn(x) is incor-porated to the Bouc-Wen model, so the variable z is ex-pressed as
zm = c|x|m sgn(x) + z, (151)
where z is given by (139).Without introducing any modifications to the standard
Bouc-Wen model, an investigation of the dynamics of asmall non-linear oscillator having softening hysteretic char-acteristic and weakly coupled with a linear oscillator wasperformed by [180].

The Hysteresis Bouc-Wen Model, a Survey 179
7.5 Piezoelectric Actuators
The Bouc-Wen model was experimentally modified by [203]to describe the hysteresis phenomenon of the piezoelectricactuator and used later by [119] and [194] to simulate thehysteresis of a piezoelectric element. The modified form is
z = α d33V − β|V |z − γ V |z|, (152)
where d33 is the piezoelectric coefficient and V denotes theinput voltage. α, β and γ control the shape of the hystere-sis loop. The same form of the Bouc-Wen model was alsoemployed to describe the frictional hysteresis force of animpact drive mechanism by [118].
7.6 Soil Behavior
In a study of the grain-crushing-induced landslides, [111]used the hysteretic stress-strain Bouc-Wen-type constitutivemodel in conjunction with a Mohr-Column friction law andTerzaghi’s effective stress principle to model the hystereticstress-displacement relationship of the soil inside the shearband τ where,
τ = τy z, (153)
in which τy = the ultimate shear strength and z is given by:
z = 1
xy
(1 − |z|n[b + (1 − b) sgn(xz)
])(154)
where x is the lateral velocity, xy is a parameter accountingfor the elasto-plastic slip tolerance and the parameter b con-trols the shape of the unloading-reloading curve. Its range ofvalues is between 0 and 1.
Another extension to the Bouc-Wen hysteresis model isperformed in [254] to provide a better representation of theactual shearing stress-strain behavior of soils under constantand variable amplitude cyclic loading. In particular, it is de-sired to obtain a better representation of the soil responseunder small amplitude non-symmetric and non-zero meanloading reversals. Simultaneously, it is also desired to ob-tain a better representation of the equivalent viscous damp-ing ratio at high strain levels. The smooth-hysteretic modelcan be obtained if a finite number p of nonlinear-hystereticsprings described by the standard Bouc-Wen model are usedin parallel, then the shearing stress τ is given by
τ = (1 − α)Gm γs + (1 − α)
M∑p=1
Gmp zp, (155)
zp = Ap γs − βp|γs ||zp|np−1zp − γp γs |zp|np (156)
with the following conditions:
M∑p=1
Gmp = Gm, (157)
M∑p=1
τmp = τm (158)
where
τmp = Gmp
(Ap
βp + γsp
)1/np
(159)
in which Gm is the (small strains) shear modulus; γs is theshearing strain; and τmp is the maximum shear stress.
A discrete version of the Bouc-Wen model to describestrong ground motion in Iceland is used in [242].
7.7 Energy Dissipation Systems
In [277], a modification of the Bouc-Wen model was pro-posed by adding the isotropic hardening mechanism to re-produce the nonlinear strain hardening in seismic resistanceof rhombic Low Yield Strength Steel under practical recip-rocating loading test. The modified form is
z = Ax − η(β|x||z|n−1z + γ x|z|n), (160)
η =(
�y
�y0
)−n
, (161)
�y ={
�y0 if �max ≤ �y0,
�y0 + μ(�max − �y0) if �max ≥ �y0,(162)
where �y0 is the initial yielding displacement; �max is theabsolute value of the maximum displacement in the loadinghistory; μ = α−ν; ν is the rate of kinematic transformation;and η ranges from 0 to 1 and follows the transformation ofdeformation history, which is decreasing.
Based on the extension of the Bouc-Wen model thataccounts for degradation, (141) with h(z) = 1, a frictionenergy dissipating system attached to reinforced concretepanel is studied. The extension of the Bouc-Wen model isemployed to model the flexibility of the connection betweenthe steel elements and the concrete panel, and to model theimpact of these bolts as well as the expansion of the con-crete holes as a result of the impact. It is concluded that,when modeling friction using elements that are based on theBouc-Wen model, the violation of the model to Drucker andIliushin postulates increases the displacement by an insignif-icant amount over some paths and has negligible effect onthe predicted behavior, [272].

180 M. Ismail et al.
8 Conclusion
This paper surveyed the literature related to the Bouc-Wenmodel. It has been organized into sections that address spe-cific issues like modeling, control, identification, etc. Eachsection presented what, in the author’s point of view, arethe main contributions relative to that specific issue. It hasnot been possible to present every single work relative tothe Bouc-Wen model as issues discussed in some papers arevery peculiar and do not fall within any general category.Nevertheless, all the papers that the authors are aware ofhave been cited in the reference part of this survey.
Acknowledgements The first author acknowledges the support ofthe Generalitat de Catalunya through the FI fellowships programs.This research has been funded by projects DPI2008-06463-C02-01 andDPI2005-08668-C03-01 of the Spanish Ministry of Science and Inno-vation.
References
1. Abe M, Yoshida J, Fujino Y (2004) Multiaxial behaviors of lam-inated rubber bearings and their modeling. ii: Modeling. J StructEng 130:1133–1144
2. Acho L, Pozo F (2009) Sliding mode control of hysteretic struc-tural systems. Int J Innov Comput Inf Control 5(4):1–7
3. Adewuya AA (1996) New methods in genetic search with real-valued chromosomes. Master’s thesis, Massachusetts Institute ofTechnology, Cambridge
4. Al-Hussaini TM, Zayas VA, Constantinou MC (1994) Seismicisolation of a multi-story frame structure using spherical slidingisolation systems. Technical report, NCEER-94-0007, NationalCenter of Earthquake Engineering Research, Buffalo
5. Aldemir U (2003) Optimal control of structures with semiactive-tuned mass dampers. J Sound Vib 266(4):847–874
6. Alhan C, Gavin H (2004) A parametric study of linear and non-linear passively damped seismic isolation systems for buildings.Eng Struct 26(4):485–497
7. Almazan JL, De la Llera JC (2003) Physical model for dynamicanalysis of structures with FPS isolators. Earthquake Eng StructDyn 32:1157–1184
8. Alvarez L, Jimenez R (2003) Semi-active control of civil struc-tures using magnetorheological dampers. In: Proceedings of theAmerican control conference, Denver, 4–6 June 2003
9. An J, Kwon D (2003) Modeling of a magnetorheological actuatorincluding magnetic hysteresis. J Intell Mater Syst Struct 14:541–550
10. Andrieu-Renaud C, Sudret B, Lemaire M (2004) The phi2method: a way to compute time-variant reliability. Reliab EngSyst Saf 84:75–86
11. Andronikou AM, Bekey GA, Masri SF (1982) Identificationof non-linear hysteretic systems using random search. In: IFAC identification and system parameter estimation, Washington,pp 331–336
12. Andronikou AM, Bekey GA, Hadaegh FY (1983) Identifiabilityof non-linear systems with hysteretic elements. J Dyn Syst MeasControl 105:209–214
13. Ang WL, Li WH, Du H (2004) Experimental and modelling ap-proaches of a MR damper performance under harmonic loading.J Inst Eng Singapore 44:1–14
14. Awrejcewicz J, Dzyubak LP (2005) Evolution of chaotic regionsin control parameter planes depending on hysteretic dissipation.Nonlinear Anal 63:155–164
15. Awrejcewicz J, Dzyubak LP (2005) Influence of hysteretic dissi-pation on chaotic responses. J Sound Vib 284:513–519
16. Awrejcewicz J, Dzyubak l (2006) Modeling, chaotic behavior,and control of dissipation properties of hysteretic systems. MathProbl Eng 2006:1–21
17. Baber TT, Noori YN (1985) Random vibration of degradingpinching systems. J Eng Mech 111:1010–1026
18. Baber TT, Wen YK (1981) Random vibration of hysteretic de-grading systems. J Eng Mech 107(6):1069–1087
19. Badoni D, Makris N (1996) Nonlinear response of single pilesunder lateral inertial and seismic loads. Soil Dyn Earthqu Eng15:29–43
20. Barbat AH, Rodellar J, Ryan EP, Molinares N (1995) Active con-trol of nonlinear base-isolated buildings. J Eng Mech 121:676–684
21. Barroso LR, Breneman SE, Smith HA (2002) Performance eval-uation of controlled steel frames under multilevel seismic loads.J Struct Eng 128:1368–1378
22. Barroso LR, Hunt S, Chase JG (2002) Application of magneto-rheological dampers for multi-level seismic hazard mitigation ofhysteretic structures. In: 15th ASCE engineering mechanics con-ference, Columbia University, New York, 2–5 June 2002
23. Basili M, De Angelis M (2007) Optimal passive control of adja-cent structures interconnected with nonlinear hysteretic devices.J Sound Vib 301:106–125
24. Bates DM, Watts DG (1988) Nonlinear regression analysis andits applications. Wiley, New York
25. Battaini M, Casciati F (1996) Chaotic behavior of hysteretic os-cillators. J Struct Control 3(1–2):7–19
26. Battaini M, Breitung K, Casciati F, Faravelli L (1998) Ac-tive control and reliability of a structure under wind excitation.J Wind Eng Ind Aerodyn 74–76:1047–1055
27. Bazant Z (1978) Endochronic inelasticity and incremental plas-ticity. Int J Solids Struct 14:691–714
28. Bazant ZP, Krizek RJ, Shieh CL (1983) Hysteretic endochronictheory for sand. J Eng Mech 109:1073–1095
29. Beadle ER, Djuric PM (1997) A fast weighted Bayesian boot-strab filter for nonlinear model state estimation. IEEE TransAerosp Electron Syst 33:338–343
30. Bendat JS, Piersol AG (2000) Random data: analysis and mea-surement, 3rd edn. Wiley, New York
31. Bernardini D, Vestroni F (2003) Non-isothermal oscillations ofpseudoelastic devices. Int J Non-Linear Mech 38(9):1297–1313
32. Black CJ, Makris N, Aiken ID (2004) Component testing,seismic evaluation and characterization of buckling-restrainedbraces. J Struct Eng 130:880–894
33. Boardman PR, Wood BJ, Carr AJ (1983) Union house—a cross-braced structure with energy dissipators. Bull N Z Soc EarthqEng 16(2):83–97
34. Bobrow JE, Jabbari F, Thai K (2000) A new approach to shockisolation and vibration suppression using a resetable actuator.J Dyn Syst Meas Control 122:570–573
35. Bonacina G (1994) Seismic base isolation of gas insulated elec-trical substations: design, experimental and numerical activities,evaluation of the applicability. In: 10th European conference onearthquake engineering, Vienna, Austria
36. Bonelli A, Bursi OS (2004) Generalized-α methods for seismicstructural testing. Earthquake Eng Struct Dyn 33:1067–1102
37. Bouc R (1967) Forced vibrations of a mechanical system withhysteresis. In: Proc 4th conf on nonlinear oscillations, Prague,Czechoslovakia
38. Bouc R (1971) Modèle mathématique d’hystérésis. Acustica21:16–25. (A mathematical model for hysteresis)

The Hysteresis Bouc-Wen Model, a Survey 181
39. Bouc R, Boussaa D (2002) Drifting response of hysteretic oscil-lators to stochastic excitation. Int J Non-linear Mech 37:1397–1406
40. Breitung K (1994) Asympotic approximations for probability in-tegrals. Lecture notes in mathematics, vol 1592. Springer, Berlin
41. Breitung K, Faravelli L (1996) Response surface methods and as-ymptotic approximations. In: Casciati F, Roberts JB (eds) Mathe-matical models for structural reliability. CRC Press, Boca Raton,pp 227–286, Chap 5
42. Breitung K, Casciati F, Faravelli L (1998) Reliability basedstability analysis for actively controlled structures. Eng Struct20(3):211–215
43. Buckle IG, Mayes RL (1990) Seismic isolation history: appli-cation and performance—a world review. Earthq Spectra 6:161–201
44. Butz T, Von Stryk O (1998) Modelling and simulation of electro-and magnetorheological fluid dampers. Z Angew Math Mech78:1–22
45. Caddemi S (1998) Parametric nature of the non-linear hardeningplastic constitutive equations and their integration. Eur J Mech ASolids 17(3):479–498
46. Cai GQ, Lin YK (1990) On randomly excited hysteretic struc-tures. J Appl Mech 57:442–448
47. Carli F (1999) Nonlinear response of hysteretic oscillator underevolutionary excitation. Adv Eng Softw 30(9–11):621–630
48. Casciati F (1987) Nonlinear stochastic dynamics of large struc-tural systems by equivalent linearization. In: Proc, 5th int confon application of statistics and probability in soil and structuralengineering, ICASP5, Vancouver, Canada
49. Casciati F (1988) Smoothed plasticity laws and elasto-plasticanalysis. Technical report, Dipartamento di Ingegneria Strut-turale e Geotecnica. Università di Roma “La Sapienza”
50. Casciati F (1989) Stochastic dynamics of hysteretic media. StructSaf 6:259–269
51. Chang SI (2004) Bifurcation analysis of a non-linear hystereticoscillator under harmonic excitation. J Sound Vib 276:215–225
52. Chang C, Zhou L (2002) Neural network emulation of in-verse dynamics for a magnetorheological damper. J Struct Eng128:231–239
53. Chase JG, Barroso LR, Hunt S (2003) Quadratic jerk regulationand the seismic control of civil structures. Earthquake Eng StructDyn 32:2047–2062
54. Chase JG, Barroso LR, Hunt S (2004) The impact of total ac-celeration control for semi-active earthquake hazard mitigation.Eng Struct 26:201–209
55. Chassiakos AG, Masri SF, Smyth AW, Caughy TK (1998) On-line identification of hysteretic systems. J Appl Mech 65:194–203
56. Chatzi EN, Triantafillou SP, Koumousis VK (2005) A computerprogram for 3d inelastic analysis of rc structures. In: 5th GRACMinternational congress on computational mechanics, Limassol,29 June–1 July 2005
57. Chen Y, Ahmadi G (1992) Wind effects on base-isolated struc-tures. J Eng Mech 118:1708–1727
58. Chen YQ, Soong TT (1988) State-of-the-art review: seismic re-sponse of secondary systems. Eng Struct 10:218–228
59. Chen BM, Lee TH, Hang CC, Guo Y, Weerasooriya S (1999)An H∞ almost disturbance decoupling robust controller designfor a piezoelectric bimorph actuator with hysteresis. IEEE TransControl Syst Technol 7(2):160–174
60. Chen Z, Wu ZQ, Yu P (2005) The critical phenomena in a hys-teretic model due to the interaction between hysteretic dampingand external force. J Sound Vib 284:783–803
61. Cheng H, Zhu WQ, Ying ZG (2006) Stochastic optimal semi-active control of hysteretic systems by using a magneto-rheological damper. Smart Mater Struct 15(3):711–718
62. Chiang DY (1999) The generalized masing models for deterio-rating hysteresis and cyclic plasticity. Appl Math Model 23:847–863
63. Chiang DY, Beck JL (1996) A transformation method for imple-menting classical multi-yield surface theory using the hardeningrule of MROZ. Int J Solids Struct 33(28):4239–4261
64. Ching J, Beck JL, Porter KA (2004) Real-time Bayesian damagedetection for uncertain dynamical systems. In: 17th ASCE engi-neering mechanics conference, University of Delware, Newark,13–16 June 2004
65. Ching J, Beck JL, Porter KA (2006) Bayesian state and parame-ter estimation of uncertain dynamical systems. Probab Eng Mech21:81–96
66. Cho S, Kim B, Jung H, Lee I (2005) Implementation of modalcontrol for seismically excited structures using magnetorheolog-ical dampers. J Eng Mech 131:177–184
67. Choi Y, Wereley NM (2002) Comparative analysis of the timeresponse of electrorheological and magnetorheological dampersusing nondimensional parameters. J Intel Mater Syst Struct13:443–451
68. Choi SB, Lee SK, Park YP (2001) A hysteresis model for thefield-dependent damping force of a magnetorheological damper.J Sound Vib 245:375–383
69. Choi K, Cho S, Jung H, Lee I (2004) Semi-active fuzzy con-trol for seismic response reduction using magnetorheologicaldampers. Earthquake Eng Struct Dyn 33:723–736
70. Christenson RE, Spencer BF, Johnson EA (2002) Experimentalstudies on the smart damping of stay cables. In: ASCE structurescongress, Denver, Colorado, 4–6 April 2002
71. Ciampi V, De Angelis M (1996) Optimal design of passive con-trol systems based on energy dissipation for earthquake protec-tion of structures. In: Proceedings of the third European con-ference on structural dynamics, EURODYN ’96, Firenze, Italia,pp 525–532
72. Clarke RP (2005) Non-Bouc degrading hysteresis model for non-linear dynamic procedure seismic design. J Struct Eng 131:287–291
73. Colangelo F, Giannini R, Pinto PE (1996) Seismic reliabilityanalysis of reinforced concrete structures with stochastic prop-erties. Struct Saf 18(2–3):151–168
74. Constantinou MC, Andane MA (1987) Dynamics of soil-base-isolated structure systems: evaluation of two models for yield-ing systems. Technical report, Department of Civil Engineering,Drexel University, Philadelphia
75. Constantinou MC, Tadjbakhsh IG (1985) Hysteretic dampers inbase isolation: Random approach. J Struct Eng 111:705–721
76. Constantinou M, Mokha A, Reinhorn A (1990) Teflon bearingsin base isolation. ii: Modeling. J Struct Eng 116(2):455–474
77. Corbi O (2003) Shape memory alloys and their application instructural oscillations attenuation. Simul Model Pract Theory11(5–6):387–402
78. Dai Z, Huang J, Wang H (2004) Semi-active control of a cable-stayed bridge under multiple-support excitations. J ZhejiangUniv Sci 5(3):317–325
79. Dang X, Tan Y (2005) An inner product-based dynamic neuralnetwork hysteresis model for piezoceramic actuators. Sens Actu-ators A Phys 121:535–542
80. De la Llera JC, Esguerra C, Almazán JL (2004) Earthquake be-havior of structures with copper energy dissipators. EarthquakeEng Struct Dyn 33:329–358
81. Deacon B, Worden K (1996) Identification of hysteretic systemsusing genetic algorithms. In: EU ROMECH–second Europeannonlinear oscillation conference, Prague
82. Deb SK (2004) Seismic base isolation—an overview. Current SciSpecial Sect Geotech Earthq Hazards 87:1426–1430

182 M. Ismail et al.
83. Demetriades GF, Constantinou MC, Reinhorn AM (1993) Studyof wire rope systems for seismic protection of equipment inbuildings. Eng Struct 15(5):321–334
84. Derham CJ, Kelly JM, Tomas AG (1985) Nonlinear natural rub-ber bearings for seismic isolation. Nucl Eng Des 84(3):417–428
85. Dimizas PC, Koumousis VK (2005) System identification ofnon-linear hysteretic systems with application to friction pendu-lum isolation systems. In: 5th GRACM international congress oncomputational mechanics, Limassol, 29 June–1 July 2005
86. Dimizas P, Koumousis V (2006) Decay law for the hystereticBouc-wen model. In: 2nd international conference on nonlinearnormal modes and localization in vibrating systems, Samos, 19–23 June 2006
87. Dobson S, Noori M, Hou Z, Dimentberg M, Barber T (1997)Modeling and random vibration analysis of SDOF systems withasymmetric hysteresis. Int J Non-linear Mech 32(4):669–680
88. Dominguez A, Sedaghati R, Stiharu I (2004) Modeling thehysteresis phenomenon of magnetorheological dampers. SmartMater Struct 13:1351–1361
89. Dominguez A, Sedaghati R, Stiharu I (2006) A new dynamichysteresis model for the magnetorheological dampers. SmartMater Struct 15(5):1179–1189
90. Dominguez A, Sedaghati R, Stiharu I (2008) Modeling and appli-cation of mr dampers in semi-adaptive structures. Comput Struct86:407–415
91. Dong S, Lu KQ, Sun JQ, Rudolph K (2005) Rehabilitation devicewith variable resistance and intelligent control. Med Eng Phys27(3):249–255
92. Draper NR, Smith H (1981) Applied regression analysis. Wiley,New York
93. Du H, Sze KY, Lam J (2005) Semi-active h infinity control ofvehicle suspension with magneto-rheological dampers. J SoundVib 283(3–5):981–996
94. Dyke SJ (2005) Current directions in structural control in the us.In: 9th world seminar on seismic isolation, energy dissipationand active vibration control of structures, Kobe, Japan, 13–16June 2005
95. Dyke SJ, Spencer BF, Sain MK, Carlson JD (1996) Experimen-tal verification of semiactive structural control strategies usingacceleration feedback. In: Proc 3rd int conf on motion and vi-bration control, vol 3, Japan Society of Mechanical Engineers,Tokyo, pp 291–296
96. Dyke SJ, Spencer BF, Sain MK, Carlson JD (1996) Modelingand control of magnetorheological dampers for seismic responsereduction. Smart Mater Struct 5:565–575
97. Ellingwood BR (2001) Earthquake risk assessment of buildingstructures. Reliab Eng Syst Saf 74:251–262
98. Erkus B, Abé M, Fujino Y (2002) Investigation of semi-activecontrol for seismic protection of elevated highway bridges. EngStruct 24:281–293
99. Erlicher S, Point N (2004) Thermodynamic admissibility ofBouc-Wen type hysteresis models. C R Méc 332(1):51–57
100. Fenz DM, Constantinou MC (2008) Spherical sliding isolationbearings with adaptive behavior: Theory. Earthquake Eng StructDyn 37:163–183
101. Fenz DM, Constantinou MC (2008) Spherical sliding isola-tion bearings with adaptive behavior: Experimental verification.Earthquake Eng Struct Dyn 37:185–205
102. Filiatrault A, Lee G, Aref A, Bruneau M, Constantinou M, Rein-horn A, Whittaker A (2004) Recent progress towards the seis-mic control of structural and non-structural systems in hospitals.Technical report, 36th technical meeting on panel on wind andseismic effects, Gaithersburg, MD, Multidisciplinary Centre forEarthquake Engineering Research (MCEER), State University ofNew York at Buffalo, Buffalo, 17–22 May 2004
103. Fletcher R (1980) Practical methods of optimization. Wiley, NewYork
104. Foliente GC (1995) Hysteresis modeling of wood joints andstructural systems. J Struct Eng 121(6):1013–1022
105. Foliente GC, Signh MP, Noori MN (1996) Equivalent lineariza-tion of generally pinching hysteretic, degrading systems. Earth-quake Eng Struct Dyn 25:611–629
106. Gavin HP (2001) Control of seismically excited vibration usingelectrorheological materials and Lyapunov methods. IEEE TransControl Syst Technol 9(1):27–36
107. Gavin HP (2001) Multi-duct ER dampers. J Intell Mater SystStruct 12:353–366
108. Gavin HP, Zaicenco A (2007) Performance and reliability ofsemi-active equipment isolation. J Sound Vib 306:74–90
109. Gerolymos N, Gazetas G (2006) Static and dynamic re-sponse of massive caisson foundations with soil andinterfacenonlinearities-validation and results. Soil Dyn EarthqEng 26:377–394
110. Gerolymos N, Gazetas G (2006) Winkler model for lateral re-sponse of rigid caisson foundations in linear soil. Soil Dyn EarthqEng 26(5):347–361
111. Gerolymos N, Gazetas G (2007) A model for grain-crushing-induced landslides-application to nikawa, Kobe 1995. Soil DynEarthq Eng 27:803–817
112. Giuclea M, Sireteanu T, Stancioiu D, Stammers CW (2004) Mod-elling of magnetorheological damper dynamic behaviour by ge-netic algorithms based inverse method. Proc Rom Acad Ser A5(1)
113. Guggenberger J, Grundmann H (2004) Monte Carlo simulationof the hysteretic response of frame structures using plastificationadapted shape functions. Probab Eng Mech 19:81–91
114. Guggenberger J, Grundmann H (2005) Stochastic response oflarge FEM models with hysteretic behavior in beam elements.Comput Methods Appl Mech Eng 194(12–16):1739–1756
115. Gunstona TP, Rebelleb J, Griffina MJ (2004) A comparisonof two methods of simulating seat suspension dynamic perfor-mance. J Sound Vib 278:117–134
116. Guo AX, Xu YL, Wu B (2002) Seismic reliability analysisof hysteretic structure with viscoelastic dampers. Eng Struct24(3):373–383
117. Guo S, Yang S, Pan C (2006) Dynamic modeling of magnetorhe-ological damper behaviors. J Intell Mat Syst Struct 17:3–14
118. Ha JL, Fung RF, Han C (2005) Optimization of an impact drivemechanism based on real-coded genetic algorithm. Sens Actua-tors A Phys 121(2):488–493
119. Ha JL, Fung RF, Yang CS (2005) Hysteresis identification anddynamic responses of the impact drive mechanism. J Sound Vib283:943–956
120. Ha J, Kung Y, Fungc R, Hsien S (2006) A comparison of fitnessfunctions for the identification of a piezoelectric hysteretic actu-ator based on the real-coded genetic algorithm. Sens Actuators A132:643–650
121. Hamidi M, El Naggar MH (2007) On the performance of SCFin seismic isolation of the interior equipment of buildings. Earth-quake Eng Struct Dyn 36:1581–1604
122. Hamidi M, El Naggar MH, Vafai A, Ahmadi G (2003) Seismicisolation of buildings with sliding concave foundation (SCF).Earthquake Eng Struct Dyn 32:15–29
123. Han YM, Lim SC, Lee HG, Choi SB, Choi HJ (2003) Hys-teresis identification of polymethylaniline-based ER fluid usingPreisach model. Mater Des 24:53–61
124. Haukaasa T, Kiureghian AD (2006) Strategies for finding the de-sign point in non-linear finite element reliability analysis. ProbabEng Mech 21(21):133–147
125. Haupt RL, Haupt SE (1998) Practical genetic algorithms. Wiley,New York
126. He WL, Agrawal AK (2002) Energy transfer approach for the de-sign of passive energy dissipation systems. In: 15th ASCE engi-neering mechanics conference, Columbia University, New York,2–5 June 2002

The Hysteresis Bouc-Wen Model, a Survey 183
127. Hong SR, Choi SB, Choi YT, Wereley NM (2005) A hydro-mechanical model for hysteretic damping force prediction of ERdamper: experimental verification. J Sound Vib 285:1180–1188
128. Hornig KH (2000) Parameter characterization of the Bouc-wenmechanical hysteresis model for sandwich composite materialsby using real coded genetic algorithms. Technical report, AuburnUniversity, Mechanical Engineering Department, 201 Ross Hall,Auburn, AL 36849
129. Horr AM, Safi M, Asadpour N (2002) Seismic analysis ofTehran telecommunication tower using complex fractional mod-ulus. Struct Des Tall Build 11:353–373
130. Hoshiya M, Maruyama O (1988) Kalman filtering of versatilerestoring systems. Technical report, Department of Civil Engi-neering, Musashi Institute of Technology, 1-28-1, Tamazutm-sumi Setagaya-ku, Tokyo 158, Japan
131. Hurtado JE, Barbat AH (1996) Improved stochastic linearizationmethod using mixed distributions. Struct Saf 18(1):49–62
132. Hurtado JE, Barbat AH (1998) Fourier-based maximum entropymethod in stochastic dynamics. Struct Saf 20:221–235
133. Hurtado JE, Barbat AH (2000) Equivalent linearization of theBouc-wen hysteretic model. Eng Struct 22:1121–1132
134. Igusa T, Der Kiureghian A (1985) Dynamic characterisation oftwo-degree-of-freedom equipment-structure system. J Eng Mech111:1–19
135. Ikhouane F, Dyke SJ (2007) Modeling and identification ofa shear mode magnetorheological damper. Smart Mater Struct16(3):605–616
136. Ikhouane F, Gomis-Bellmunt O (2008) A limit cycle approachfor the parametric identification of hysteretic systems. Syst Con-trol Lett 57:663–669
137. Ikhouane F, Rodellar J (2005) On the hysteretic Bouc-Wenmodel. Part I: Forced limit cycle characterization. Nonlinear Dyn42:63–78
138. Ikhouane F, Rodellar J (2005) On the hysteretic Bouc-Wenmodel. Part II: Robust parametric identification. Nonlinear Dyn42:79–95
139. Ikhouane F, Rodellar J (2006) A linear controller for hystereticsystems. IEEE Trans Automat Control 51(2):340–344
140. Ikhouane F, Rodellar J (2007) Systems with hysteresis: analy-sis, identification and control using the Bouc-Wen model. Wiley,New York
141. Ikhouane F, Mañosa V, Rodellar J (2004) Bounded and dissipa-tive solutions of the Bouc-Wen model for hysteretic structuralsystems. In: Proceedings of the American control conference,Boston, pp 3520–3524
142. Ikhouane F, Mañosa V, Rodellar J (2005) Adaptive control of ahysteretic structural system. Automatica 41:225–231
143. Ikhouane F, Hurtado JE, Rodellar J (2007) Variation of the hys-teresis loop with the Bouc-Wen model parameters. NonlinearDyn 48(4):361–380
144. Ikhouane F, Mañosa V, Rodellar J (2007) Dynamic properties ofthe hysteretic Bouc-Wen model. Syst Control Lett 56:197–205
145. Inaudi JA (1997) Modulated homogeneous friction: a semi-activedamping strategy. Earthquake Eng Struct Dyn 26(3):361–376
146. Inaudi J, Lopez Almansa F, Kelly JM, Rodellar J (1992) Predic-tive control of base isolated structures. Earthquake Eng StructDyn 21:471–482
147. Ioannou PA, Sun J (1996) Robust adaptive control. Prentice Hall,New York
148. Irschik H, Schacher K, Kugi A (1998) Control of earthquakeexcited nonlinear structures using Lyapunov’s theory. ComputStruct 67:83–90
149. Ismail M, Rodellar J, Ikhouane F (2008) A new isolation devicefor equipment protection. In: 4th European conference on struc-tural control, Saint Petersburg, Russia, 8–12 September 2008,pp 359–366
150. Ismail M, Rodellar J, Ikhouane F (2008) A new approach torolling-based seismic isolators for light- to moderate structures.In: The 14th world conference on earthquake engineering, Bei-jing, China, number S25-012, 12–17 October 2008
151. Jangid RS, Datta TK (1995) Seismic behavior of base isolatedbuilding: A state-of-the-art-review. Struct Build 110(2):186–203
152. Jangid RS, Kelly JM (2000) Torsional displacements in base-isolated buildings. Earthq Spectra 16:443–454
153. Jansen LM, Dyke SJ (2000) Semi-active control strategies forMR dampers: A comparative study. J Eng Mech 126(8):795–803
154. Ji H, Moon Y, Kim C, Lee I (2005) Structural vibration controlusing semiactive tuned mass damper. In: The eighteenth KKCNNsymposium on civil engineering-KAIST6, Taiwan, 18–20 De-cember 2005
155. Jiménez R, Alvarez-Icaza L (2004) Civil structures semi-activecontrol with limited measurements. In: Proceeding of the 2004American control conference, Boston, 30 June–2 July 2004
156. Juhn G, Manolis GD, Constantinou M (1992) Experimentalstudy of secondary systems in a base isolated structure. J StructEng 118(8):2204–2221
157. Jung BH, Ruangrassamee A, Kawashima K, Spencer BF, Lee I(2002) Seismic protection of nonlinear coupled bridge systemsusing semi-active control strategy. KSCE J Civil Eng Struct Eng6(1):47–60
158. Jung H, Spencer BF, Lee I (2003) Control of seismically ex-cited cable-stayed bridge employing magnetorheological fluiddampers. J Struct Eng 129:873–883
159. Kafal C, Grigoriu M (2004) Seismic fragility analysis. In: 9thASCE specialty conference on probabilistic mechanics and struc-tural reliability
160. Karray MA, Bouc R (1989) Etude dynamique d’un systèmed’isolation antisismique. Ann ENIT 3(1):43–60
161. Katsikadelis JT, Kallivokas LF (1988) Plates on biparametricelastic foundation by BDIE method. J Eng Mech 114:847–832
162. Kelly JM (1982) The influence of base isolation on the seis-mic response of light secondary equipment. Technical re-port, UCB/EERC-81/17, Earthquake engineering research cen-ter, University of California, Berkeley
163. Kelly JM (1986) Seismic base isolation: Review and bibliogra-phy. Soil Dyn Earthq Eng 5:202–216
164. Kelly JM (1991) Base isolation: Origin and development. NewsUniv Calif Earthq Eng Res Cent 12(1):1–3
165. Kelly JM (1998) Seismic isolation of civil buildings in the USA.Prog Struct Eng Mater 3:279–285
166. Kelly TE (2001) Base isolation of structures, design guidlines.Technical report, Holmes Consulting Group Ltd
167. Kelly JM, Tsztoo DF (1977) Earthquake simulation testing of aatepping-frame with energy-absorbing devices. Technical report,Report No UCB/EERC-77/17, Earthquake engineering researchcenter, University of California, Berkely
168. Kerschen G, Worden K, Vakakis AF, Golinval JC (2006) Past,present and future of nonlinear system identification in structuraldynamics. Mech Syst Signal Process 20(3):505–592
169. Khaloo AR, Tariverdilo S (2002) Localization analysis of rein-forced concrete members with softening behavior. J Struct Eng128:1148–1157
170. Kim SB, Spencer BF, Yun CB (2005) Frequency domain identi-fication of multi-input, multi-output systems considering phys-ical relationships between measured variables. J Eng Mech131(5):461–472
171. Koliopulos PK, Chandler AM (1995) Stochastic linearization ofinelastic seismic torsional response: formulation and case stud-ies. Eng Struct 17(7):494–504
172. Kosmatopoulos EB, Smyth AW, Masri SF, Chassiakos AG(2001) Robust adaptive neural estimation of restoring forces innonlinear structures. J Appl Mech Trans ASME 68:880–893

184 M. Ismail et al.
173. Kunnath SK, Mander JB, Fang L (1997) Parameter identificationfor degrading and pinched hysteretic structural concrete systems.Eng Struct 19(3):224–232
174. Kwok NM, Ha QP, Nguyen TH, Li J, Samali B (2006) A novelhysteretic model for magnetorheological fluid dampers and para-meter identification using particle swarm optimization. Sens Ac-tuators A 132:441–451
175. Kwok NM, Ha QP, Nguyen MT, Li J, Samali B (2007) Bouc-wen model parameter identification for a MR fluid damper usingcomputationally efficient GA. ISA Trans 46:167–179
176. Kyprianou A, Worden K, Panet M (2001) Identification ofhysteresis systems using the differential evolution algorithm.J Sound Vib 2(248):289–314
177. Lacarbonara W, Bernardini D, Vestroni F (2004) Nonlinear ther-momechanical oscillations of shape-memory devices. Int J SolidsStruct 41(5–6):1209–1234
178. Lambrou V, Constantinou MC (1994) Study of seismic isolationsystems for computer floors. Technical report, NCEER-94-0020,July 1994
179. Landau ID, Lozano R, M’Saad M (1997) Adaptive control.Springer, Berlin
180. Laxalde D, Thouverez F, Sinou J (2006) Dynamics of a linearoscillator connected to a small strongly non-linear hysteretic ab-sorber. Int J Non-Linear Mech 41:969–978
181. Lee T, Kawashima K (2006) Effectiveness of semi-active con-trol on a seismic-excited isolated bridge. In: First Europeanconference on earthquake engineering and seismology, Geneva,Switzerland, 3–8 September 2006
182. Leger P, Dussault S (1992) Seismic-energy dissipation in MDOFstructures. J Struct Eng 118(5):1251–1269
183. Leitmann G (1994) Semiactive control for vibration attenuation.J Intell Mater Syst Struct 5:841–846
184. Leva A, Piroddi L (2002) NARX-based technique for the model-ing of magneto-rheological damping devices. Smart Mater Struct11:79–88
185. Li SJ, Suzuki Y, Noori M (2004) Improvement of parameterestimation for non-linear hysteretic systems with slip by a fastBayesian bootstrap filter. Int J Non-linear Mech 39:1435–1445
186. Li SJ, Suzuki Y, Noori M (2004) Identification of hysteretic sys-tems with slip using bootstrap filter. Mech Syst Signal Process18:781–795
187. Li SJ, Yu H, Suzuki Y (2004) Identification of non-linear hys-teretic systems with slip. Comput Struct 82:157–165
188. Liao WH, Lai CY (2002) Harmonic analysis of a magnetorheo-logical damper for vibration control. Smart Mater Struct 11:288–296
189. Liao WH, Wang DH (2003) Semiactive vibration control of trainsuspension systems via magnetorheological dampers. J IntellMater Syst Struct 14:161–172
190. Liao K, Wen Y, Foutch DA (2007) Evaluation of 3D steel mo-ment frames under earthquake excitations. i: Modeling. J StructEng 133(3):462–470
191. Lin J (1994) Extraction of dynamic soil properties using ex-tended Kalman filter. J Geotech Eng 120(12):2100–2117
192. Lin J, Betti R (2004) On-line identification and damage detectionin non-linear structural systems using a variable forgetting factorapproach. Earthquake Eng Struct Dyn 33:419–444
193. Lin TW, Hone CC (1993) Base isoaltion by free rolling rods un-der basement. Earthquake Eng Struct Dyn 22(3):261–273
194. Lin C, Yang S (2006) Precise positioning of piezo-actuatedstages using hysteresis-observer based control. Mechatronics16:417–426
195. Lin JS, Zhang Y (1994) Nonlinear structural identification usingextended Kalman filter. Comput Struct 52(4):757–764
196. Lin J, Betti R, Smyth AW, Longman RW (2001) On-line identifi-cation of non-linear hysteretic structural systems using a variabletrace approach. Earthquake Eng Struct Dyn 30:1279–1303
197. Lind NC (1987) Reliability and risk analysis in civil engineer-ing. In: Proceeding of ICASP5, the fifth international conferenceon applications of statistics and probability in soil and structuralengineering, University of British Columbia, Vancouver, Canada
198. Liu H, Teng J (2004) Modeling of smart dampers for vibrationcontrol. In: Proceedings of the 2004 international conference onintelligent mechatronics and automation, Chengdu, China, Au-gust 2004
199. Lo HR, Hammond JK, Sainsbury MG (1988) Non-linear systemidentification and modelling with application to an isolator withhysteresis. In: Proceedings of the 6th international modal analy-sis conference, vol II, pp 1453–1459
200. Loh CH, Chung ST (1993) A three-stage identification approachfor hysteretic systems. Earthquake Eng Struct Dyn 22:129–150
201. Loh CH, Cheng CR, Wen YK (1995) Probabilistic evaluationof liquefaction potential under earthquake loading. Soil DynEarthqu Eng 14:269–278
202. Loh C, Wu LY, Lin PY (2003) Displacement control of iso-lated structures with semi-active control devices. J Struct Control10:77–100
203. Low TS, Guo W (1995) Modeling of a three-layer piezoelectricbimorph beam with hysteresis. J Microelectromechanical Syst4(4):230–237
204. Lu X, Zhou Q (2002) Dynamic analysis method of a com-bined energy dissipation system and its experimental verification.Earthquake Eng Struct Dyn 31:1251–1265
205. Luo N, Rodellar J, de la Sen M (1998) Composite robust activecontrol of seismically excited structures with actuator dynamics.Earthquake Eng Struct Dyn 27:301–311
206. Luo N, Rodellar J, de la Sen M, Vehi J (2000) Output feedbacksliding mode control of base isolated structures. J Franklin Inst337(5):555–577
207. Luo N, Rodellar J, Vehi J, de la Sen M (2001) Composite semi-active control of seismically excited structures. J Franklin Inst338(2–3):225–240
208. Ma F, Zhang H, Bockstedte A, Foliente GC, Paevere P (2004)Parameter analysis of the differential model of hysteresis. J ApplMech 71:342–349
209. Ma F, Ng CH, Ajavakom N (2006) On system identificationand response prediction of degrading structures. Struct ControlHealth Monit 13:347–364
210. Mack JW, Nistri P, Zecca P (1993) Mathematical models for hys-teresis. SIAM Rev 35(1):94–123
211. Makris N, Black CJ (2004) Dimensional analysis of bilinear os-cillators under pulse-type excitations. J Eng Mech 130:1019–1031
212. Makris N, Deoskar HS (1996) Prediction of observed responseof base-isolated structure. J Struct Eng 122(5):485–493
213. Mañosa V, Ikhouane F, Rodellar J (2005) Control of uncer-tain non-linear systems via adaptive backstepping. J Sound Vib280:657–680
214. Marano GC, Greco R (2003) Efficiency of base isolation systemsin structural seismic protection and energetic assessment. Earth-quake Eng Struct Dyn 32:1505–1531
215. Marano GC, Greco R (2004) A performance-reliability-basedcriterion for the optimum design of bridge isolators. ISET JEarthq Technol 41:261–276
216. Marano GC, Sgobba S (2007) Stochastic energy analysis of seis-mic isolated bridges. Soil Dyn Earthqu Eng 27:759–773
217. Maruyama O, Yun CB, Hoshiya M, Shinozuka M (1989) Pro-gram exkal2 for identification of structural dynamic systems.Technical report, NCEER-89-0014, National center for earth-quake engineering research, Buffalo
218. Masri SF (1994) A hybrid parametric/nonparametric approachfor the identification of nonlinear systems. Probab Eng Mech9:47–57

The Hysteresis Bouc-Wen Model, a Survey 185
219. Masri SF, Smyth A, Chassiakos AG (1995) Adaptive identifica-tion for the control of systems incorporating hysteretic elements.In: Proceedings of the international symposium on microsys-tems, intelligent materials and robots, Japan, pp 419–422
220. Masri SF, Caffrey JP, Caughey TK, Smyth AW, Chassiakos AG(2004) Identification of the state equation in complex non-linearsystems. Int J Non-Linear Mech 39:1111–1127
221. McClamroch NH, Gavin HP (1995) Closed loop structural con-trol using electrorheological dampers. In: Proc Am control confAmerican automatic control council, Washington, pp 4173–4177
222. Mehendale CS, Grigoriadis KM (2004) Hysteresis compensationusing lpv gain-scheduling. In: Proceeding of the 2004 Americancontrol conference, Boston, 30 June–2 July 2004
223. Mokha A, Constantinou M, Reinhorn A (1990) Teflon bearingsin base isolation. Part I: Testing. J Struct Eng 116(2):438–454
224. Moon SJ, Bergman LA, Voulgaris PG (2003) Sliding mode con-trol of cable-stayed bridge subjected to seismic excitation. J EngMech 129:71–78
225. Moreschi LM, Singh MP (2003) Design of yielding metallic andfriction dampers for optimal seismic performance. EarthquakeEng Struct Dyn 32:1291–1311
226. Mostaghel N (1984) Resilient-friction base isolator. Technical re-port, Report No UTEC 84-097, Department of Civil Engineering,University of Utah, Salt Lake City
227. Mostaghel N, Byrd RA (2002) Inversion of Ramberg-Osgoodequation and description of hysteresis loops. Int J Non-linearMech 37:1319–1335
228. Mostaghel N, Flint BF (1986) Preliminary experimental evalua-tion of r-fbi bearings. Technical report, Report No UTEC 86-089,Department of Civil Engineering, University of Utah, Salt LakeCity
229. Mostaghel N, Kelly JM (1987) Design procedures for the r-fbibearings. Technical report, Report No UCB/EERC-87/18, Earth-quake Engineering Research Center, University of California,Berkely
230. Murnal P, Sinha R (2004) Aseismic design of structure-equipment systems using variable frequency pendulum isolator.Nucl Eng Des 231:129–139
231. Myslimaj B, Gamble S, Chin-Quee D, Davies A (2003) Base iso-lation technologies for seismic protection of museum artifacts.In: The 2003 IAMFA annual conference in San Francisco, Cali-fornia, 21–24 September 2003
232. Naeim F, Kelly JM (1999) Design of seismic isolatedstructures—from theory to practice. Wiley, New York
233. Narasimhan S, Nagarajaiah S, Johnson EA, Gavin HP (2005)Smart base isolated benchmark building, Part I: Problem defi-nition. J Struct Control 13(2–3):573–588
234. Nguyen TH, Kwok NM, Ha QP, Li J, Samali B (2006) Adaptivesliding mode control for civil structures using magnetorheologi-cal dampers. In: ISARC2006
235. Ni YQ, Ko JM, Wong CW (1998) Identification of non-linearhysteretic isolators from periodic vibration tests. J Sound Vib4(217):737–756
236. Ni YQ, Ko JM, Wong CW (1999) Nonparametric identificationof nonlinear hysteretic systems. J Eng Mech 125:206–215
237. Ni YQ, Ying ZG, Ko JM, Zhu WQ (2002) Random response ofintegrable Duhem hysteretic systems under non-white excitation.Int J Non-linear Mech 37(8):1407–1419
238. Noori M, Dimentberg M, Hou Z, Christodoulidou R, AlezandrouA (1995) First-passage study and stationary response analysis ofa BWB hysteresis model using quasi-conservative stochastic av-eraging method. Probab Eng Mech 10:161–170
239. Ohtori Y, Spencer BF (2002) Semi-implicit integration algo-rithm for stochastic analysis of multi-degree-of-freedom struc-tures. J Eng Mech 128:635–643
240. Oka S, Kimb D, Parkc K, Kohb H (2007) Semi-active fuzzy con-trol of cable-stayed bridges using magneto-rheological dampers.Eng Struct 29:776–788
241. Okuizumi N, Kimura K (2004) Multiple time scale analysis ofhysteretic systems subjected to harmonic excitation. J Sound Vib272:675–701
242. Ólafsson S, Remseth S, Sigbjörnsson R (2001) Stochastic modelsfor simulation of strong ground motion in Iceland. EarthquakeEng Struct Dyn 30:1305–1331
243. Oldfield M, Ouyang H, Mottershead JE (2005) Simplified mod-els of bolted joints under harmonic loading. Comput Struct84:25–33
244. Onat ET, Drucker DC (1952) Inelastic instability and incrementaltheories of plasticity. J Aeronaut Sci 20(3):181–186
245. Panet M, Jezequel L (2000) Dissipative unimodal structuraldamping identification. Int J Non-linear Mech 35:795–815
246. Park YJ, Wen YK, Ang AHS (1986) Random vibration of hys-teretic systems under bi-directional ground motions. EarthquakeEng Struct Dyn 14(4):543–557
247. Park KS, Jung HJ, Lee IW (2002) Hybrid control strategies forseismic protection of benchmark cable-stayed bridges. In: Pro-ceedings of the 7th US national conference on earthquake engi-neering, Boston
248. Park KS, Jung HJ, Lee IW (2003) Hybrid control strategy forseismic protection of a benchmark cable-stayed bridge. EngStruct 25:405–417
249. Park K, Jung H, Spencer BF, Lee I (2003) Hybrid control sys-tems for seismic protection of a phase II benchmark cable-stayedbridge. J Struct Control 10:231–247
250. Pastor N, Ferran AR (2005) Hysteretic modeling of X-bracedshear walls. Thin-Walled Struct 43:1567–1588
251. Pei JS, Smyth AW, Kosmatopoulos EB (2004) Analysis andmodification of Volterra/Wiener neural networks for the adaptiveidentification of non-linear hysteretic dynamic systems. J SoundVib 275:693–718
252. Peng B, Conte JP (1997) Statistical insight into constant-ductilitydesign using a non-stationary earthquake ground motion model.Earthquake Eng Struct Dyn 26:895–916
253. Petrone F, Lacagnina M, Scionti M (2004) Dynamic characteri-zation of elastomers and identification with rheological models.J Sound Vib 271:339–363
254. Pires JA (1996) Stochastic seismic response analysis of soft soilsites. Nucl Eng Des 160:363–377
255. Pivovarov I, Vinogradov OG (1987) One application of Bouc’smodel for non-linear hysteresis. J Sound Vib 118(2):209–216
256. Pozo F, Ikhouane F, Rodellar J (2005) Control of hysteretic base-isolated structures: an adaptive backstepping. In: Proceedings ofthe 44th IEEE conference on decision and control, and the Eu-ropean control conference 2005 Seville, Spain, 12–15 December2005
257. Pozo F, Ikhouane F, Pujol G, Rodellar J (2006) Adaptive back-stepping control of hysteretic base-isolated structures. J Vib Con-trol 12(4):373–394
258. Pozo F, Montserrat PM, Rodellar J, Acho L (2008) Robust activecontrol of hysteretic base-isolated structures: application to thebenchmark smart base-isolated building. Struct Control HealthMonit 15(5):720–736
259. Pozo F, Acho L, Rodríguez A, Pujol G (2009) Nonlinear model-ing of hysteretic systems with double hysteretic loops using posi-tion and acceleration information. Nonlinear Dyn. doi:10.1007/s11071-008-9414-7 (to appear)
260. Ramachandran J (2005) Analysis of pile foundations under seis-mic loading. Technical report, CBE Institute
261. Ramallo JC, Johnson EA, Spencer BF (2002) Smart base isola-tion systems. J Eng Mech 128:1088–1100

186 M. Ismail et al.
262. Ramallo JC, Yoshioka H, Spencer BF (2004) A two-step identi-fication technique for semiactive control systems. Struct ControlHealth Monitoring 11:273–289
263. Rao SS (1996) Engineering optimization: theory and practice.Wiley, New York
264. Ribakov Y, Gluck J (2002) Selective controlled base isola-tion system with magnetorheological dampers. Earthquake EngStruct Dyn 31:1301–1324
265. Robinson WH, Tucker AG (1977) A lead-rubber shear damper.Bull N Z Soc Earthq Eng 10(3):151–153
266. Robinson WH, Tucker AG (1983) Test results for lead-rubberbearings for the William M Clayton building, toe bridge, andwaiotukupuna bridge. Bull N Z Soc Eng 14(1):21–33
267. Rodríguez A, Ikhouane F, Rodellar J, Iwata N (2009) Modelidentification of a large-scale magnetorheological fluid damper.Smart Mater Struct 18(1)
268. Rodríguez A, Ikhouane F, Rodellar J, Luo N (2009) Modelingand identification of a small scale magnetorheological damper.J Intell Mater Syst Struct (to appear)
269. Ryu M, Hong S (1998) End-to-end design of distributed real-timesystems. Control Eng Pract 6:93–102
270. Saad P, Al Majid A, Thouverez F, Dufour R (2006) Equivalentrheological and restoring force models for predicting the har-monic response of elastomer specimens. J Sound Vib 290:619–639
271. Sain PM, Sain MK, Spencer BF (1997) Models for hysteresisand application to structural control. In: American control con-ference, June 1997, pp 16–20
272. Sasani M, Popov EP (2001) Seismic energy dissipators for RCpanels: analytical studies. J Eng Mech 127(8):835–843
273. Savaresi SM, Bittanti S, Montiglio M (2005) Identification ofsemi-physical and black-box non-linear models: the case of MR-dampers for vehicles control. Automatica 41:113–127
274. Schenk CA, Pradlwarter HJ, Schuëller GI (2005) Non-stationaryresponse of large, non-linear finite element systems under sto-chastic loading. Comput Struct 83(14):1086–1102
275. Shampine LF (1994) Numerical solutions for ordinary differen-tial equations. Chapman & Hall, London
276. Shen Y, Golnaraghi MF, Heppler GR (2005) Analytical and ex-perimental study of the response of a suspension system with amagnetorheological damper. J Intel Mater Syst Struct 16:135–147
277. Shih MH, Sung WP (2005) A model for hysteretic behavior ofrhombic low yield strength added damping and stiffness. ComputStruct 83:895–908
278. Shih M, Sung W, Go C (2004) Investigation of newly developedadded damping and stiffness device with low yield strength steel.J Zhejiang Univ Sci 5(3):326–334
279. Simeonov VK, Sivaselvan MV, Reinhorn AM (2000) Nonlinearanalysis of structural frame system by the state-space approach.Comput-Aided Civil Infrastruct Eng 15:76–89
280. Sims ND, Stanway R, Johnson AR (1999) Vibration controlusing smart fluids: A state-of-the-art review. Shock Vib Dig31(3):195–203
281. Sims ND, Peel DJ, Stanway R, Johnson AR, Bullough WA(2000) The electrorheological long-stroke damper: A new mod-elling technique with experimental validation. J Sound Vib229(2):207–227
282. Simulescu I, Mochio T, Shinozuka M (1989) Equivalent lin-earization method in nonlinear FEM. J Eng Mech 115:475–492
283. Singh MP (1988) Seismic design of secondary systems. ProbabEng Mech 3(3):151–158
284. Sivaselvan MV, Reinhorn AM (2000) Hysteretic models for de-teriorating inelastic structures. J Eng Mech 126:633–640
285. Sivaselvan MV, Reinhorn AM (2002) Collapse analysis: Largeinelastic deformations analysis of planar frames. J Struct Eng128:1575–1583
286. Sjöberg M (2002) On dynamic properties of rubber isolators.Technical report, The Marcus Wallenberg laboratory for soundand vibration research, Stockholm
287. Skelton RE (1988) Dynamic systems control: linear systemsanalysis and synthesis. Wiley, New York
288. Skinner RI, Robinson WH, McVerry GH (1993) An introductionto seismic isolation. Wiley, New York
289. Smith AW, Masri SF, Chassiakos AG, Caughey T.K. (1999) On-line parametric identification of MDOF nonlinear hysteretic sys-tems. J Eng Mech 125(2):133–142
290. Smith AW, Masri SF, Kosmatopoulos EB, Chassiakos AG,Caughey TK (2002) Development of adaptive modeling tech-niques for non-linear hysteretic systems. Int J Non-linear Mech37:1435–1451
291. Song J, Der Kiureghian A (2006) Generalized Bouc-Wen modelfor highly asymmetric hysteresis. J Eng Mech 132:610–618
292. Song J, Ellingwood BR (1999) Seismic reliability of specialmoment steel frames with welded connections: I. J Struct Eng125:357–371
293. Song J, Der Kiureghian A, Sackman JL (2007) Seismic interac-tion in electrical substation equipment connected by non-linearrigid bus conductors. Earthquake Eng Struct Dyn 36:167–190
294. Soong TT (1998) Experimental simulation of degrading struc-tures through active control. Earthquake Eng Struct Dyn 27:143–154
295. Soong TT, Constantinou MC (1994) Passive and active structuralvibration control in civil engineering. Springer, Berlin
296. Soong TT, Grigoriu M (1993) Random vibration of mechanicaland structural systems. Prentice-Hall, New York
297. Spanos PD, Cacciola P, Muscolino G (2004) Stochastic averag-ing of preisach hysteretic systems. J Eng Mech 130:1257–1267
298. Spencer BF, Suhardjo J, Sain MK (1994) Frequency domainoptimal control strategies for aseismic protection. J Eng Mech120:135–159
299. Spencer BF, Dyke SJ, Sain MK, Carson JD (1997) Phenom-enological model for magnetorheological damper. J Eng Mech123(3):230–238
300. Staudacher K (1982) Integral earthquake protection of structuresiv: full base isolation and seismic mass analogy. Technical report,Eidgenossische Technische Hochschule (Zurich), Inst für Baus-tatikund Konstruktion, Bericht 134. Birkhäuser, Basel
301. Stengel RF (1986) Stochastic optimal control: theory and appli-cation. Wiley, New York
302. Sues RH, Mau ST, Wen YK (1988) System identification of de-grading hysteretic restoring forces. J Eng Mech 114:833–846
303. Symans MD, Constantinou MC (1999) Semi-active control sys-tems for seismic protection of structures: A state-of-the-art re-view. Eng Struct 21(6):469–487
304. Tan P, Dyke SJ, Richardson A, Abdullah M (2005) Integrateddevice placement and control design in civil structures using ge-netic algorithms. J Struct Eng 131(10):1489–1496
305. Thyagarajan RS (1989) Modeling and analysis of hystereticstructural behavior. Technical report, Rep No EERL 89-03, Cal-ifornia Institute of Technology, Pasadena, Calif
306. Thyagarajan RS, Iwan WD (1990) Performance characteristics ofa widely used hysteretic model in structural dynamics. Technicalreport, Proc 4th US nat conf on earthquake engrg, vol 2, EERI,Oakland, Calif, pp 177–186
307. Tsang HH, Su RKL, Chandler AM (2006) Simplified inverse dy-namics models for MR fluid dampers. Eng Struct 28(3):327–341
308. Tse T, Chang CC (2004) Shear-mode rotary magnetorheologicaldamper for small-scale structural control experiments. J StructEng 130:904–911
309. Tyler RG, Robinson WH (1984) High-strain tests on lead-rubberbearings for earthquake loadings. Bull N Z Soc Earthq Eng17:90–105

The Hysteresis Bouc-Wen Model, a Survey 187
310. Uang CM, Bertero VV (1988) Use of energy as a design criterionin earthquake resistant design. Technical report, UCB/EERC-88/18, University of California, Berkeley
311. Uang CM, Bertero VV (1990) Evaluation of seismic energy instructures. Earthquake Eng Struct Dyn 19:77–90
312. Unsal M, Crane CD, Niezrecki C (2006) Vibration control ofparallel platforms based on magnetorheological damping. In:Florida conference on recent advances in robotics, FCRAR, Mi-ami, Florida, 25–26 May 2006
313. Valanis KC (1971) A theory of viscoplasticity without a yieldsurface. Part i: General theory. Arch Mech 23(4):517–533
314. Van de Lindt JW (2004) Evolution of wood shear wall test-ing, modeling, and reliability analysis: bibliography. Pract PeriodStruct Des Constr 9(1):44–53
315. Van de Lindt JW, Rosowsky DV (2005) Strength-based reliabilityof wood shearwalls subject to wind load. J Struct Eng 131:359–363
316. Van de Lindt JW, Walz MA (2003) Development and applicationof wood shear wall reliability model. J Struct Eng 129:405–413
317. Vavreck AN (2000) Control of a dynamic vibration absorberwith magnetorheological damping. Technical report, Pennsylva-nia State University, Altoona Collegue, Altoona, Pennsylvania
318. Visintin A (1994) Differential models of hysteresis. Springer,Berlin
319. Wang C, Foliente GC (2001) Hysteretic models for deterioratinginelastic structures. J Eng Mech 127:1200–1202
320. Wang DH, Liao WH (2005) Modeling and control of magne-torheological fluid dampers using neural networks. Smart MaterStruct 14:111–126
321. Wang CH, Wen YK (2000) Evaluation of pre-northridge low risesteel buildings. Part I: Modeling. J Eng Mech 126(10):1160–1168
322. Wang ER, Ma XQ, Rakheja S, Su CY (2004) Modeling asym-metric hysteretic properties of an mr fluids damper. In: 43rd IEEEconference on decision and control, Atlantis, Paradise Island, Ba-hamas, 14–17 December 2004
323. Warn GP, Whittaker AS (2004) Performance estimates in seismi-cally isolated bridge structures. Eng Struct 26(9):1261–1278
324. Weea H, Kim YY, Jungb Hl, Leec GN (2001) Nonlinear rate-dependent stick-slip phenomena: Modeling and parameter esti-mation. Int J Solids Struct 38(8):1415–1431
325. Wen YK (1976) Method for random vibration of hysteretic sys-tems. J Eng Mech Div 102(EM2):246–263
326. Wen YK (1980) Equivalent linearization for hysteretic systemsunder random excitation. J Appl Mech 47:150–154
327. Wen YK (1986) Stochastic response and damage analysis of in-elastic structures. Probab Eng Mech 1(1):49–57
328. Wen YK (1989) Methods of random vibration for inelastic struc-tures. Appl Mech Rev 42(2):39–52
329. Wentzel H (2006) Modelling of frictional joints in dynamicallyloaded structures—a review. Technical report, Dept of Solid Me-chanics, Royal Institute of Technology (KTH) (SE-100 44 Stock-holm) Sweden
330. Whalen TM, Bhatia KM, Archer GC (2002) Semi-active vibra-tion control for the 3rd generation benchmark problem includ-ing spillover suppression. In: 15th ASCE engineering mechanicsconference, Columbia University, New York, 2–5 June 2002
331. Whittaker A, Constantinou M, Tsopelas P (1999) Nonlinear pro-cedures for seismic evaluation of buildings. Struct Des Tall Build8:1–13
332. Wilson EL (2002) Three-dimensional static and dynamic analy-sis of structures, 3rd edn. CSI, Computers and Structures, Berke-ley
333. Wong CW, Ni YQ, Ko JM (1994) Steady-state oscillation of ahysteretic differential model. Part II: Performance analysis. J EngMech 120:2299–2325
334. Wong CW, Ni YQ, Lau SL (1994) Steady-state oscillation of ahysteretic differential model. Part I: Response analysis. J EngMech 120(11):2271–2298
335. Wright FL (1977) An autobiography: Frank Lloyd Wright. Hori-zon Press, New York
336. Xia PQ (2005) An inverse model of MR damper using optimalneural network and system identification. J Sound Vib 266:1009–1023
337. Xu Z, Agrawal AK, He WL, Tan P (2007) Performance of pas-sive energy dissipation systems during near-field ground motiontype pulses. Eng Struct 29:224–236
338. Yaghoubian J (1991) Isolating building contents from earthquakeinduced floor motions. Earthq Spectra 7(1):127–143
339. Yang JN, Agrawal AK (2002) Semi-active hybrid control sys-tems for nonlinear buildings against near-field earthquakes. EngStruct 24(3):271–280
340. Yang CY, Cheng HD, Roy RV (1991) Chaotic and stochasticdynamics for a nonlinear structural system with hysteresis anddegradation. Probab Eng Mech 6(3–4):193–203
341. Yang JN, Wu JC, Agrawal AK (1995) Sliding mode con-trol for nonlinear and hysteretic structures. J Eng Mech Div21(12):1330–1339
342. Yang JN, Kim JH, Agrawal AK (2000) A resetting semi-activestiffness damper for seismic response control. J Struct Eng126(12):1427–1433
343. Yang G, Spencer BF, Carlson JD, Sain MK (2002) Large-scaleMR fluid dampers: modeling and dynamic performance consid-erations. Eng Struct 24:309–323
344. Yang G, Spencer BF, Jung HJ, Carlson JD (2004) Dynamic mod-eling of large-scale magnetorheological damper systems for civilengineering applications. J Eng Mech 130(9):1107–1114
345. Yao GZ, Yap FF, Chen G, Li WH, Yeo SH (2002) MR damperand its application for semi-active control of vehicle suspensionsystem. Mechatronics 12:963–973
346. Yar M, Hammond JK (1987) Parameter estimation for hystereticsystems. J Sound Vib 117:161–172
347. Yi F, Dyke SJ, Frech S, Carlson JD (1998) Investigation of mag-netorheological dampers for earthquake hazard mitigation. In:Proc 2nd world conf on struct control. Wiley, New York, pp 349–358
348. Yi F, Dyke SJ, Caicedo JM, Carlson JD (1999) Seismic responsecontrol using smart dampers. In: Proc Am control conf Americanautomatic control council, Washington, pp 1022–1026
349. Yi F, Dyke SJ, Caicedo JM, Carlson. JD (2001) Experimen-tal verification of multiinput seismic control strategies for smartdampers. J Eng Mech 127(11):1152–1164
350. Ying ZG, Zhu WQ, Ni YQ, Ko JM (2002) Stochastic averagingof Duhem hysteretic systems. J Sound Vib 254(1):91–104
351. Yong P (1981) Parameter estimation for continuous time models-a survey. Automatica 17:23–39
352. Yosef SS, Bruce AB (1994) Optimization by pattern search. EurJ Oper Res 78:277–303
353. Yoshida O, Dyke SJ (2004) Seismic control of a nonlinear bench-mark building using smart dampers. J Eng Mech 130:386–392
354. Yoshida O, Dyke SJ (2005) Response control of full scale irreg-ular buildings using MR dampers. J Struct Eng 131(5):734–742
355. Yoshida O, Dyke SJ, Giacosa LM, Truman KZ (2002) Torsionalresponse control of asymmetric buildings using smart dampers.In: 15th ASCE engineering mechanics conference, ColumbiaUniversity, New York, 2–5 June 2002
356. Yoshioka H, Ramallo JC, Spencer BF (2002) Smart base iso-lation strategies employing magnetorheological dampers. J EngMech 128:540–551
357. Younis CJ, Tadjbakhsh IG (1984) Response of sliding rigid struc-ture to base excitation. J Eng Mech 110:417–32

188 M. Ismail et al.
358. Yu G, Lin W, Hong R (2006) Fuzzy control of piezoelectric sys-tems using relaxed lmi stability conditions. In: Proceedings of2006 CACS automatic control conference, St John’s University,Tamsui, Taiwan, 10–11 November 2006
359. Zaiming L, Katukura H (1990) Markovian hysteretic character-istics of structures. J Eng Mech 116(8):1798–1811
360. Zayas VA, Low SS, Mahin SA (1990) A simple pendulum tech-nique for achieving seismic isolation. Earthq Spectra 6:317–333
361. Zhang H, Foliente GC, Yang Y, Ma F (2002) Parameter identi-fication of inelastic structures under dynamic loads. EarthquakeEng Struct Dyn 31:1113–1130
362. Zhang J, Makris N, Delis T (2004) Structural characteriza-tion of modern highway overcrossings-case study. J Struct Eng130:846–860
363. Zhang J, Sato T, Iai S (2007) Non-linear system identification ofthe versatile-typed structures by a novel signal processing tech-nique. Earthquake Eng Struct Dyn 36:909–925
364. Zhou K, Doyle JC, Glover K (1996) Robust and optimal control.Prentice-Hall, New York
365. Zhou Q, Nielsen SRK, Qu WL (2006) Semi-active control ofthree-dimensional vibrations of an inclined sag cable with mag-netorheological dampers. J Sound Vib 296:1–22
366. Zhu WQ, Lin YK (1991) Stochastic averaging of energy enve-lope. J Eng Mech 117:1890–1905
367. Zhu WQ, Luo M, Dong L (2004) Semi-active control of windexcited building structures using MR/ER dampers. Probab EngMech 19(3):279–285
368. Zwillinger D (2003) CRC, standard mathematical tables and for-mulae, 31st edn. CRC Press, Boca Raton