-
1The Earths Magnetic Field.
Scientists still do not know exactly what causes the earth's
magnetic field. In the 16thcentury, it was believed that a mountain
of magnetite (a magnetic mineral) was located atthe North Pole and
that this mountain caused the earth's magnetic field. English
physicianWilliam Gilbert was the first to propose, in 1600, that
the earth itself was a massivemagnet. Most Scientists today believe
the magnetic field is produced by electric currentsgenerated by the
movement of molten metal in the outer core of the Earth.A recent
model called the Glatzmaier-Roberts model explains it more simply.
There is a solid iron inner core surrounded by a hot, liquid iron
outer core, that rotateslightly faster than the surface of the
earth. This causes electrons to flow and this electroncurrent
creates the magnetic field.
To simplify the concept you can consider that the earthcontains
a magnet with a north and a south pole.
The magnet sets up a magnetic field around the earth.This
magnetic field is comprised of flux lines.The density of the flux
lines determines the strength of thefield.
The Symbol for Flux Density is B and is measured in Teslas
(T)
B total is a measure of the magnetic field at a particular point
on the earth.
1T = 1000000 uT (micro)= 1000000000 nT (nano)
MAGUTM displays B values in nT
-
2Close to the poles the magnitude of the earths magnetic field
would be close to 60microteslas, decreasing to 30 microteslas as we
near the equator.
At the north pole, the force of the magnetic field (FluxLines)
is downward into the ground. At the south pole,the force is outward
out of the ground. Every otherplace on the earth the force is at
some angle to theearths surface.
This angle is known as the Dip Angle.At the poles the dip is 90
(perpendicular to the earths surface) and decreases to 0(parallel
to the earths surface) at the equator.
The earths magnetic field, as with all magnetic fields, are
vector quantities.A vector quantity has both a magnitude &
direction.The magnitude of the earths field is known as the Btotal
(Bt)The direction of the earths magnetic field is known as the
Dip
Because the earths magnetic field is a vector it can be broken
down in to its primarycomponents.The vertical component: Bv (
magnetic force perpendicular to the earths surface)The horizontal
component: Bh ( magnetic force parallel to the earths surface )
The horizontal field is of importance in surveying as direction
is calculated from thehorizontal component.
The horizontal field is a function of the total field and the
dipBh = Btotal * Cosine DipThe smaller the dip the larger the hz
field.Near the equator where the dip is small the entire field is
comprised of the horizontalcomponent.
As we head north the dip would increase thus decreasing the
horizontal field.Accurate magnetic measurements are difficult near
the poles as the horizontal field issubstantially reduced due to
the high dip angleWhich is why we have the qualifier on azimuth
specifications. Az +\- 1 degree for dipangles below 75
degrees.Above 75 degrees dip and the measurements are not as
accurate.
-
3Magnetic Field Vector Components
Total Intensity (Bt). Horizontal Intensity (Bh), Vertical
Intensity (Bv), Dip, Declination (D), North-South Intensity (X),
East-West Intensity (Y),
B total The earths total magnetic field measured in Teslas
(T)Represented in MAGUTM in nanoteslasBt = Sq Rt of ( Bv^2 + Bh^2
)
B horizontal The horizontal component of the Bt. The component
of the Bt that direction is derived from.Represented in MAGUTM in
nanoteslasBh = Bt * Cosine Dip
B vertical The vertical component of the earths magnetic field
.Represented in MAGUTM in nanoteslasBv = Bt * Sin Dip
Dip The angle at which the magnetic field flux lines intersect
the earths
surface. Measured in degrees.The inclination of the dip &
the total magnitude (Bt ) determine the valueof Bh & Bv . Dip =
ArcTan Bv \ Bh
Declination The angle between magnetic north and true
north.Measured in degrees.
-
4True North & Magnetic North
The earths magnetic poles do not line up with earths
geographical poles.The earths geographical poles are the axis
points about which the earth rotates.
The magnetic pole that the north end of a compass needle will
point to is known asMagnetic North.
The geographical pole (the axis around which the earth spins) is
known as True North.
The angular difference between Magnetic North and True North is
known as theMagnetic Declination.
Methods used to determine declination include;
Isogonic Charts or Declination Maps Programs that use
Geomagnetic Reference Models such as MAGUTM
Geomagnetic reference models mathematically model the magnetic
field around theearth. The model is created from numerous
observations of the magnetic field on theground, at sea and in the
air.The models are typically valid for 5 year periods.
MagneticDeclination
-
5Declination however is not a constant value due to the fact
that the magnetic north pole isconstantly moving.
Complex fluid motion of the molten metal in the liquid outer
core causes the north pole tomove slowly over time.This movement is
known as secular change.
Secular change is one of the main reasons why Geomagnetic
Reference Models need tobe constantly updated.
-
6Factors that influence declination
Secular change. The declination for a particular location is
time dependant. The north pole is moving at a rate as high as 25
kilometers per year.Depending on the location the declination
change can be fairly signficant. TheMAGUTM example included has .3
degree change per year.
Geomagnetic Reference ModelsIt is accepted that the
International Geomagnetic Reference Field (IGRF ) is accurateto
within 1 degree and the Canadian GRF accurate to .5 degree.
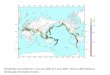
Local magnetic anomaliesLocal magnetic anomalies can be caused
by iron ore deposits & geological featuresof volcanic origin
(faults & lava beds )Magnetic anomalies can not be predicted by
Geomagnetic Reference Models and canonly be detected by comparing
observed magnetic values to the model values.Magnetic anomalies
have been known to cause up to 4 degree declination variations.
Diurnal effects.Diurnal motion of the north pole is caused by
solar wind. The ionized particles emanating from the sun distort
the earths magnetic field.As the earth rotates, any particular
location well be subject to the lee side thenalternately the
windward side of the solar wind.This causes an effect of moving the
north pole around an elliptical path tens ofkilometers in
diameter.Diurnal effect on declination is dependent on latitude.
The higher the latitude theworse the effect.
Solar Magnetic Activity ( Solar Storms )During periods of high
solar magnetic activity bursts of charged particles areprojected in
to space.These particles react with and distort the earths magnetic
field.The result can be dramatic movements of the north pole thus
changes in declination.
-
7North References
All of our MWD directional probes (MEP, DEP,PCD etc ) are
magnetic measurementtools.They do not measure true north.As such to
reference to true north we need to add declination.
For surveying reporting purposes there are 2 main types of north
reference for direction
- True North- Grid North
- True North is the most common way of referencing
direction.True north uses magnetic north & declination
correction.Using magnetic models, which are recomputed every 5
years, declination canaccurately be modeled. As such regardless of
when a well is surveyed it will have the same survey +\-declination
errors if surveyed at a later date.
- Grid North is a method of applying a 2 dimensional coordinate
system to theearth. Grid north can be referenced from magnetic
north by applying the MagneticConvergence Angle and also referenced
to true north by applying the GridConvergence Angle.Grid north
corrections are made the same way as declination corrections with
thesame geomagnetic reference models.
-
8Gz
Horizontal
Vertical
Gx
GyInc.Inclination
Directional Probe Sensors:
Sperry Sun directional tools use 3 accelerometers, 3
magnetometers and atemperature sensor for inclination and azimuth
calculations.
Accelerometers:
Accelerometers are used to calculate inclination and high side
toolface.
Inclination is measured in the borehole referenced to vertical.0
= vertical90 = horizontal
222 gzgygxG ++=
22 gygxgoxy +=
= gzgoxy1tan
Gz Inc = Cos 1 Gz
Gxy Inc = Sin 1 Gxy
T SlotProbe Highside
-
High side toolface is referenced from high side of the
borehole.
HSG
=
gxgy1tan
We have 2 types of accelerometers:
Force Balanced & Quartz Hinged.
Although both have different mechanics they essentially work on
the sameprinciple.
A Force Balanced accelerometer has a magnet suspended in ferro
fluid.The accelerometer contains a set of coils that are oppositely
wound that whenenergized create a magnetic field.The ferro fluid
has iron particles that help float the magnet in the magnetic
fieldcreated from the external coils
0
180 90 R
90 L9
-
10
The accelerometer circuitry forces the magnet to remain in
neutral position.
When horizontal it requires no force to keep the magnet in its
neutral position.
Zero force = 0 volts.As the accelerometer is moved from the
horizontal position it requires force to keep itneutral ( balanced
).The force required to balance the accelerometer requires a
certain voltage.The voltage is porportional to the gravitational
force being exerted on the device.
The accelerometer works on a 2.5 to + 2.5 scale that corresponds
to 1 to 1g range.
The higher the inclination, the higher the force required to
keep the magnet balanced.The response of the accelerometer as it is
rotated is a cosine function of the inclination.
At 90 degrees inc. ( horizontal ) Cos 90 = 0g ( 0 volts )
At 45 degrees inc. Cos 45 = 0.707g ( 1.767v )
At 0 degrees inc. ( vertical ) Cos 0 = 1g ( 2.5v )
With the combination of the 3 accelerometers we can always get
an accuratemeasurement of the horizontal plane & and tool
inclination
+ 2.5 v 1 G
-2.5 v - 1 G
-
11
Magnetometers:
Magnetometers measure flux parallel ( inline ) with the
magnetometer.
It works similar to the accelerometer in that it measures the
voltage required to null outthe external magnetic field.
A magnetometer has 2 oppositely wound coils wrapped around 2 Mu
metal rods.Mu metal is a ferromagnetic material that does not
retain a magnetic charge from anexternal field.
An AC current is passed through the rods which energizes the
rods ( in opposite magneticpolarity )
When a magnetic material reaches saturation point the current
being generated from themagnetic field levels off.
When the magnetometer is parallel to an external magnetic field
one coil will saturatemore quickly than the other due to the
opposite polarities of the coils.( Both coils are observing the
same magnetic field. But one will already biased in thepolarity of
the external field so the saturation point will be reached
faster)
As each rod reaches saturation the current generated internally
in the rods levels off andthe time difference can be
calculated.Based on the time difference a voltage is then fed back
in to the rods to generate a DCmagnetic field to null out the
external magnetic field.
The voltage required to null out the external magnetic field is
representative of theexternal magnetic field.
The stronger the field (more flux ) the quicker the saturation
times between the 2 willoccur.
MagneticFlux
-
12
A magnetometer oriented magnetic north and placed at an
inclination complimentary tothe dip will read the entire Btotal. (
dip 75 - Magnetometer at 15 )
A magnetometer oriented magnetic north and placed vertical ( 0
degrees ) will read Bvertical.
A magnetometer oriented magnetic north and placed horizontal (
90 degrees ) will readB horizontal
A magnetometer in the hz plane pointed east or west
(perpendicular to the flux lines )willnot measure any external
magnetic field.
Rotate a magnetometer in the horizontal plane around a 360
circle and you will see acosine wave.
Azimuth calculations.
To calculate azimuth the tools must first calculate inclination
& HSG.
With the Inc & HSG the tool can then calculate the values of
the magnetometers that arein the hz plane.
The polarities of Bx, By & Bz are are observed and the
quadrant that the tool is pointedin is calculated.
From the ratio of Bx & By to Bz the position in the quadrant
is calculated then referencedto north.
-
13
SPERRY-SUN DRILLING SERVICES MAGUTM v3.00
GEOGRAPHIC/UTM CO-ORDINATE CONVERSIONS & MAGNETIC PARAMETER
CALCULATIONS
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
COMPANY : Petro-Canada Oil & Gas PLATFORM ID : PC Dover WELL
NAME : PC A7P 5-4/15-32-92-12W4M DATE : 09-January-2001 JOB No.
:
All values calculated at MEAN SEA Level using Magnetic Model:
IGBGCF01-----------------------------------------------------------------------------
Geographic/UTM Co-ordinates in NORTHERN hemisphere at WELL-HEAD
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
UTM GRID ZONE = 12V CENTRAL MERIDIAN = 249.000
GEOGRAPHIC U.T.M. (m) U.T.M. (ft) ---------- ----------
----------- Latitude (Northing) : 57: 2:40.120 6322455.127
20742963.016 Longitude (Easting) : 248: 8:15.320 447671.734
1468739.284
UTM GRID Convergence = -0.7237 degrees MAGNETIC Convergence =
19.7502 degrees
GRID NORTH is 0:43:25.174 WEST of TRUE NORTH MAGNETIC NORTH is
19:45: 0.682 EAST of GRID NORTH
To convert a MAGNETIC direction to a TRUE direction; ADD 19.027
deg To convert a MAGNETIC direction to a GRID direction; ADD 19.750
deg To convert a TRUE direction to a GRID direction; ADD 0.724
deg-----------------------------------------------------------------------------
Components of Earth's Magnetic Field relative to TRUE NORTH on
09/JAN/2000
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
Component Magnitude Rate of Change --------- ---------
-------------- Declination : 19.027 deg. = 19: 1:35.5 -17.5
Minutes/year Inclination/Dip : 78.665 deg. = 78:39:54.8 -2.3
Minutes/year Horizontal : 11715 Nanotesla 26 nT/year Northward :
11075 Nanotesla 44 nT/year Eastward : 3819 Nanotesla -47 nT/year
Vertical : 58446 Nanotesla -72 nT/year Total Field : 59608
Nanotesla -65 nT/year
-----------------------------------------------------------------------------
Checksummed Datasets (WELL-HEAD) : North Reference : TRUE GRID
MAGNETIC
Total Field (nT) : 59608 59608 59608 Dip Angle (deg) : 78.67
78.67 78.67 Total Correction (deg) : 19.03 19.75 0.00
Checksum Value : 231480 231984 218159
-
14
Concerns With MAGUTM
If the latitude and longitude entered in MAGUTM are incorrect
the declination willbe WRONG
Based on the LSD the latitude and longitude should determined
from the LSD mapsin the office prior to leaving for a job.
Once on location the lat & long should be compared with the
lat & long generatedfrom MAPCON. These should match closely
with preference given to MAPCOMnumbers.
The lat & long should then be compared to that of the well
plots and the well license. The purpose of checking the 3 are to
pick up any errors that may be present. The well license is gospel.
If there is a difference the co man should be consulted to ensure
the data on the well
license is correct.
-
15
Linkshttp://www.geocities.com/magnetic_declination/http://encarta.msn.com/index/conciseindex/63/06374000.htm?z=1&pg=2&br=1http://www.geolab.emr.ca/geomag/e_nmpole.htmlhttp://www.ngdc.noaa.gov/seg/potfld/faqgeom.html#q1http://www.albertaclassic.com/nav.htm
Magnetic Field Vector ComponentsFactors that influence
declinationNorth ReferencesA magnetometer oriented magnetic north
and placed vertical ( 0 degrees ) will read B vertical.A
magnetometer oriented magnetic north and placed horizontal ( 90
degrees ) will read B horizontal