Embed Size (px)
Citation preview
i
The Development and Control of a Unicycle Robot
by
Surachat Chantarachit
A dissertation submitted in partial fulfillment of the requirements for the degree of doctor of Engineering in
Mechatronics
Examination Committee: Prof. Manukid Parnichkun (Chairperson) Dr. Mongkol Ekpanyapong Prof. Pennung Warnitchai
External Examiner: Prof. Teresa Zielinska Vice-Dean, Faculty of Power and Aeronautical Engineering, Warsaw University of Technology Poland
Nationality: Thai Previous Degree: Master of Engineering in Mechatronics Asian Institute of Technology Thailand Scholarship Donor: Royal Thai Government - AIT Fellowship
Asian Institute of Technology School of Engineering and Technology
Thailand May 2017
ii
ACKNOWLEDGEMENTS
My significant thank to my thesis advisor, Prof. Manukid Parnichkun. This thesis would not be successful without his obligingness, invaluable suggestion and strong financial support. I also thank Dr. Mongkol Ekpanyapong and Prof. Pennung Warnitchai, who helped and suggested me in variety aspects of my research. And thank for contributing their valuable time. Without any help of Mechatronic’s friends, this research could not be completed. I would like to thank my senior; Dr. Kanjanapan Sukvichai, Mr. Somphop Limsoonthrakul, Mr. Wiput Tuvayanond and also Mr. Choopong Chauypen for sharing their knowledge and providing comments when I got any troubles. Moreover, I would like to thank secretary staffs; Ms. Chaowaret Sudsaweang and Ms. Pornpun Pugsawade in ISE building. Last but not least, I would like to thank my families and Ms. Kanokwan Singha for encouraging when I disheartened. Finally, I would like to thank myself for patience and endeavor to solve the problems in my research.

iii
ABSTRACT
Balancing of unicycle robot is a challenging topic for control and mechanical design. The robot has to robustly balance itself in both longitudinal and lateral directions under uncertain disturbances and inherent non-linear effects. This research presents the development and control of a unicycle robot which utilizes double-flywheel technique for roll (lateral) control and the inverted-pendulum technique for pitch (longitudinal) control. The non-linear dynamic model is derived by Lagrangian approach. The linearized model is approximated around upright position and analyzed. The unicycle robot prototype is designed, built and controlled. Linear quadratic regulator with integral action (LQR+I) is proposed to balance the robot in both directions and compared with the conventional LQR. Simulation and experimental results of balancing control and robot position control are presented. The results significantly show superior performance of LQR+I over LQR. Keywords: Unicycle robot, Gyroscopic effect, Non-linear system, Linear quadratic regulator with integral action
iv
TABLE OF CONTENTS CHAPTER TITLE PAGE TITLE PAGE i
ACKNOWLEDGEMENTS ii
ABSTRACT iii
TABLE OF CONTENTS iv
LIST OF FIGURES vi
LIST OF TABLES viii LIST OF NOTATIONS ix
1 INTRODUCTION 1
1.1 Background 1
1.2 Statement of the problem 3
1.3 Objective 4
1.4 Scopes and limitations 4
2 LITERATURE REVIEW 5
2.1 Overview 5
2.2 Robot hardware 6
2.3 Dynamics model 12
2.4 Control algorithm 13
3 UNICYCLE ROBOT HARDWARE 17
3.1 Conceptual design 17
3.2 Mechanical design 22
3.3 Electrical design 24
3.4 Programing 26
4 DYNAMIC MODEL 27
4.1 Robot wheel 27
4.2 Robot frame 28
4.3 Lagrangian and lagrange equation 31
4.4 Model of direct-current (DC) motor 34
4.5 Dynamic model linearization 37
4.6 Robot parameters 50
v
5 ROBOT SIMULATION 53
5.1 Linear quadratic regulator 53
5.2 Linear quadratic regulator with integral action 58
6 EXPERIMENTS 63
6.1 Experimental results of robot balancing on flat surface 63
6.2 Experimental results of robot balancing on rough surface 72
7 CONCLUSION AND FUTURE WORK 75
7.1 Conclusion 75
7.2 Future work 75
REFERENCES 76
APPENDIX 78
Comments and responses to the paper entitled 78
Non-linear dynamic model by S-function 83
vi
LIST OF FIGURES
FIGURE TITLE PAGE
Figure 1.1 (a) Automated guided vehicle (b) Vacuum cleaner robot 1 (c) Bicycle robot (d) Unicycle robot (e) Jumping robot
Figure 1.2 The Stanford University’s unicycle robot model [1] 2
Figure 2.1 Unicycle robot model proposed by Scoonwinkel [10] 6
Figure 2.2 Unicycle robot model proposed by Yamafuji [4, 5] 7
Figure 2.3 (a) Symmetric rotor (b) Symmetric rotor 7
Figure 2.4 Unicycle robot developed by David W. Vos [8] 8
Figure 2.5 Unicycle robot developed by Kadis [13] 8
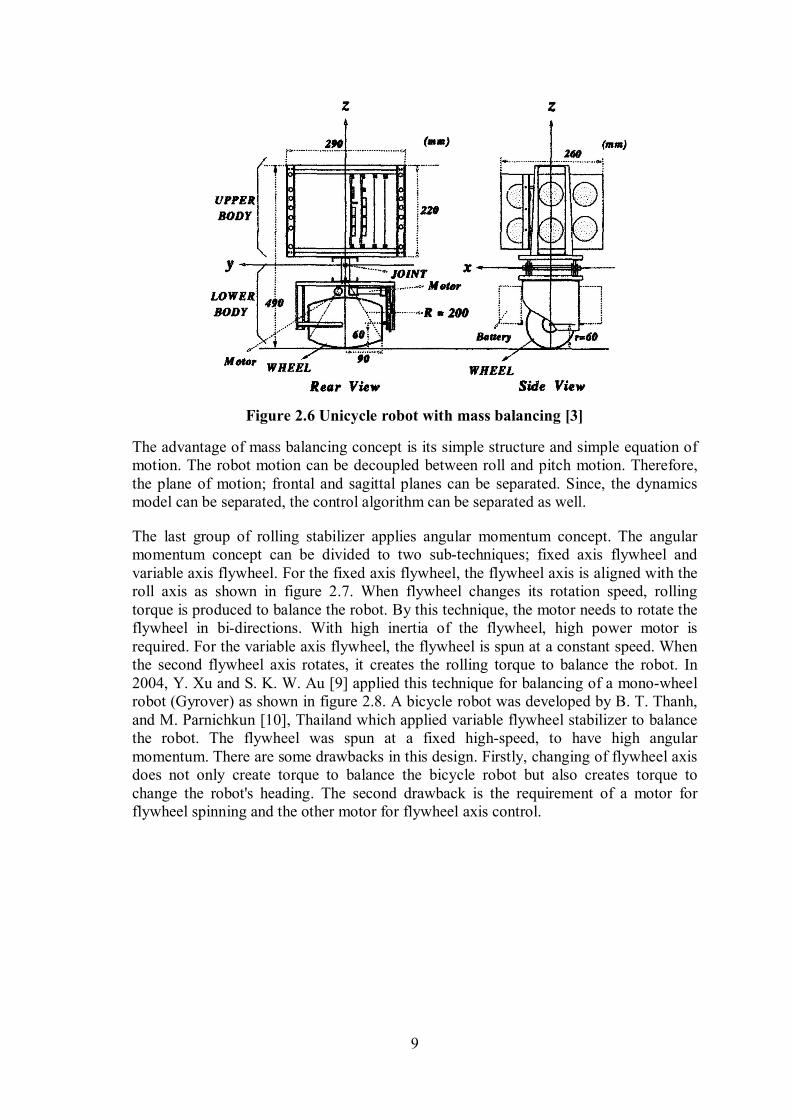
Figure 2.6 Unicycle robot with mass balancing [3] 9
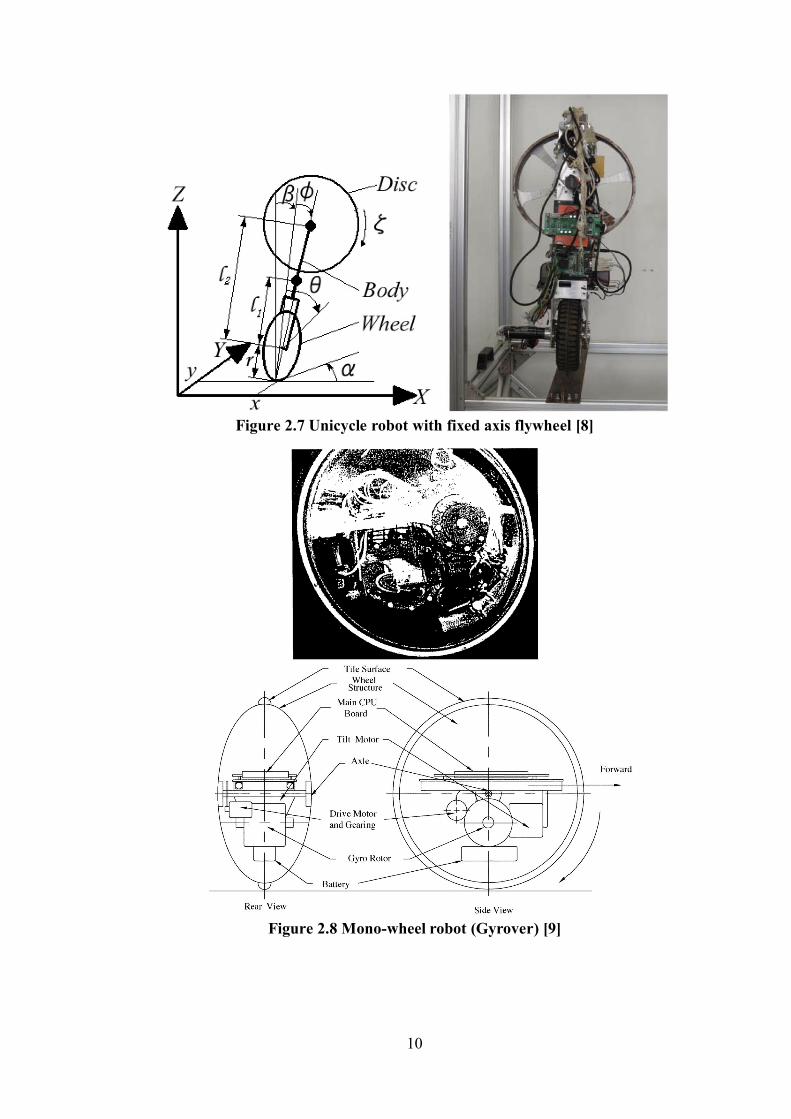
Figure 2.7 Unicycle robot with fixed axis flywheel [8] 10
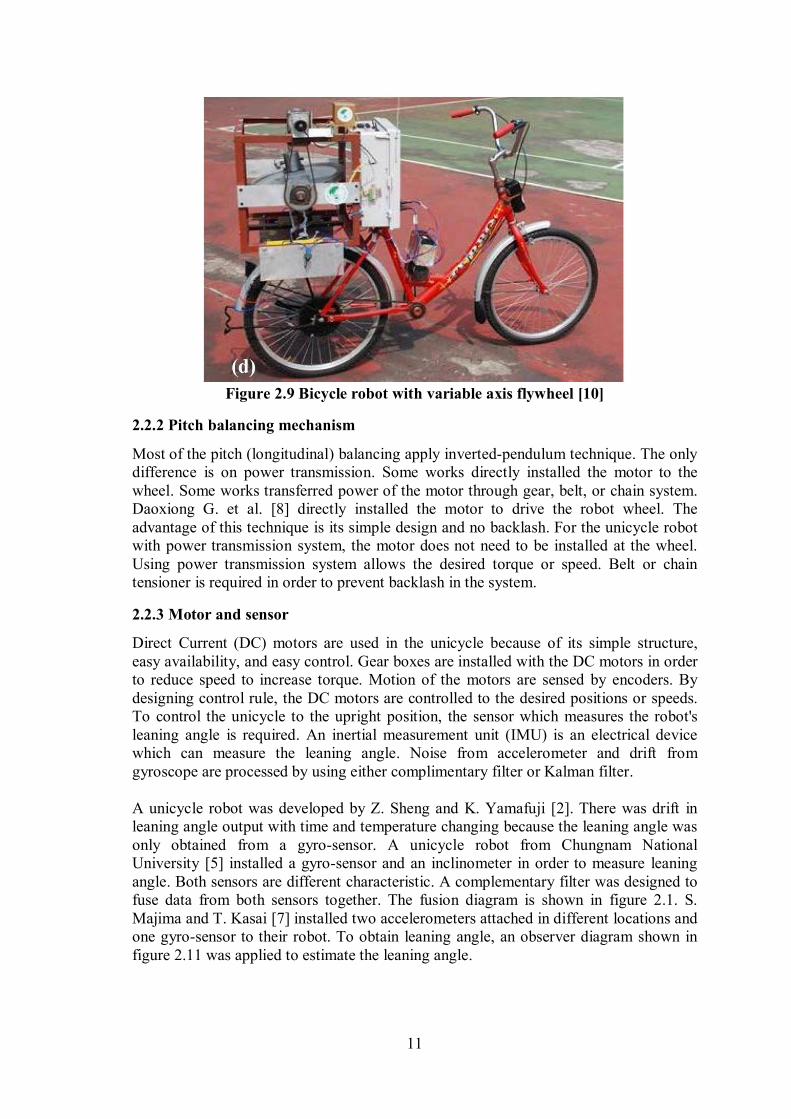
Figure 2.8 Mono-wheel robot (Gyrover) [9] 10
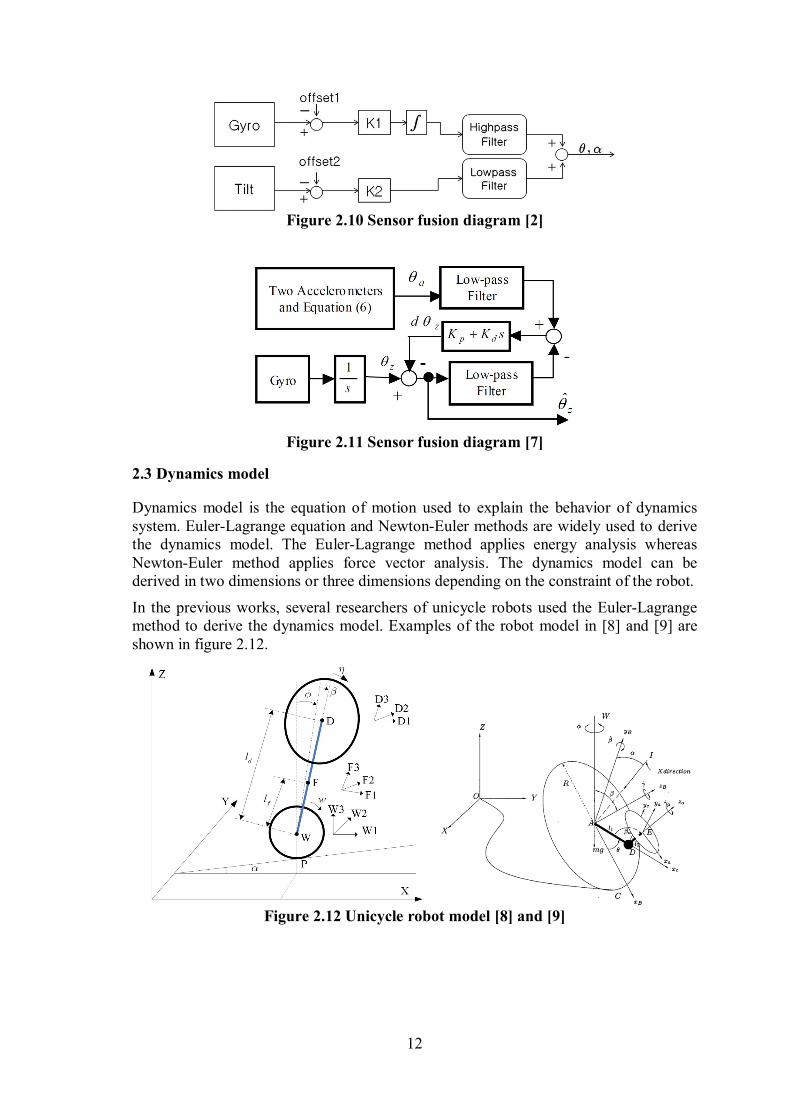
Figure 2.9 Bicycle robot with variable axis flywheel [10] 11
Figure 2.10 Sensor fusion diagram [2] 12
Figure 2.11 Sensor fusion diagram [7] 12
Figure 2.12 Unicycle robot model [8] and [9] 12
Figure 2.13 PID controller for lateral direction [5] 13
Figure 2.14 PID controller for longitudinal direction [6] 14
Figure 2.15 LQR for unicycle robot at Beijing University of Technology [11] 15
Figure 2.16 (a) Control block diagram of roll angle 15 (b) Control block diagram of pitch angle [11]
Figure 2.17 Control block diagram of unicycle robot [12] 16
Figure 3.1 Completed model of AIT unicycle robot 17
Figure 3.2 Torque generated from flywheel 17
Figure 3.3 Unicycle robot leaning in lateral direction 18
Figure 3.4 Flywheel model 19
Figure 3.5 Unicycle robot model in longitudinal direction 20
Figure 3.6 Acceleration at the center gravity of the robot body 21
Figure 3.7 Acceleration at the center gravity of the robot wheel 21
Figure 3.8 Driving wheel transmission system using chain 22
Figure 3.9 Flywheel structure 22
Figure 3.10 Parts of flywheels set of the unicycle robot 23
Figure 3.11 Wheel and DC motors of the unicycle robot 23
Figure 3.12 Flywheel and motors 24
Figure 3.13 Electrical circuit 24
Figure 3.14 Gyro sensor and electrical hardware 25
Figure 3.15 Unicycle robot electrical schematic diagram 25
Figure 3.16 Sequence of the program 26
Figure 4.1 Unicycle robot model: robot wheel 27
vii
Figure 4.2 Robot frame 29
Figure 4.3 Flywheel component torque 34
Figure 4.4 Unicycle robot CAD model 50
Figure 5.1 Unicycle robot in state-space form 53
Figure 5.2 LQR block diagram 54
Figure 5.3 Simulation results of balancing and position control of 55 the unicycle robot using LQR (linearized model)
Figure 5.4 Simulation results of balancing and position control of 56 the unicycle robot using LQR (non-linearized model)
Figure 5.5 Simulation results of reference tracking of the unicycle robot 57 using LQR (linearized model)
Figure 5.6 Simulation results of reference tracking of the unicycle robot 58 using LQR (non-linearized model)
Figure 5.7 LQR+I controller block diagram 59
Figure 5.8 Simulation results of balancing and tracking by 60 using LQR+I (linearized model)
Figure 5.9 Simulation results of balancing and tracking by 60 using LQR+I (non-linearized model)
Figure 5.10 Simulation results of reference tracking by 61 using LQR+I (linearized model)
Figure 5.11 Simulation results of reference tracking by 61 using LQR+I (non-linearized model)
Figure 6.1 Real unicycle robot with double flywheels used in 63 the experiments
Figure 6.2 Photos from the experiment 64 ( https://www.youtube.com/watch?v=t6npxU_x1Ng )
Figure 6.3 Experimental results of roll and pitch angles of the robot 65 using LQR
Figure 6.4 Experimental results of heading angle of the robot using LQR 65
Figure 6.5 Experimental results of robot wheel using LQR 66
Figure 6.6 Experimental results of precession angles and spinning speeds 66 of flywheels using LQR
Figure 6.7 Experimental result of position tracking of the robot using LQR 67
Figure 6.8 Photos from the experiment with disturbance using LQR+I 68
Figure 6.9 Experimental results of roll and pitch angles of the robot with 69 disturbance using LQR+I
Figure 6.10 Experimental result of heading of the robot with disturbance 69 using LQR+I
Figure 6.11 Experimental result of wheel position of the robot along x axis 70 using LQR+I
Figure 6.12 Experimental results of precession angles and spinning speeds 70 of the flywheels using LQR+I
Figure 6.13 Experimental result of position tracking of the robot along x axis 71 using LQR+I
viii
Figure 6.14 Photos from the experiment on rough terrain using LQR+I 72
Figure 6.15 Experimental results of roll and pitch angles of the robot on 73 rough terrain using LQR+I
Figure 6.16 Experimental result of heading of the robot on rough terrain 73 using LQR+I
Figure 6.17 Experimental result of wheel position of the robot on 74 rough terrain using LQR+I
ix
LIST OF TABLES
TABLE TITLE PAGE
Table 4. Unicycle robot parameters 51
Table 5.1 Simulation results of the robot using LQR 62
Table 5.2 Simulation results of the robot using LQR+I 62
Table 5.3 Simulation results of the robot in position tracking 62
x
LIST OF NOTATIONS
The following symbols are used in this report.
A System matrix
Ta Tangent acceleration
Ra Radial acceleration
B Input matrix C Coriolis matrix D Disturbance force F Generalized actuating force matrix f Generalized actuating force
G Gravity matrix
rG Gear transmission ratio
FI Moment inertia of the body
wI Moment inertia of the wheel
cFWI Moment inertia of flywheel
sJ Moment of inertia of shaft with flywheel set
J LQR cost function K LQR controller gain
iK LQR+I controller gain
tK Torque constant of the DC motor
eK Back-emf (back-electromotive-force) constant
L Lagrangian is the difference between kinematic energy and potential energy
sL Angular momentum of the flywheel
l Height of the center of gravity
Fl Length from robot frame to wheel hub of the unicycle robot
M Inertia/mass matrix m Unicycle robot mass
wm Robot wheel mass
Fm Robot frame mass
Q State weighting matrix
R Control weighting matrix R Armature coil resistance
0r Distance from origin point coordinate points to the center of the robot wheel
1r Distance from origin point coordinate points to the center of the robot frame
T Kinematic energy u Input vector V Potential energy
,V V
Input voltage
x State vector
0x exogenous vector with the dynamics
ex Error state

xi
rx The reference input
ez Integral of error ( edt )
w Rotational velocity of the center of mass of the robot wheel
s Spinning speed of the flywheel
, ,,
Torque input around roll, pitch, yaw and wheel axis
Angular precession speed. , , , Roll, Pitch, Yaw and Wheel angle
F Falling angular acceleration
( )falling Roll Falling torque in roll axis
( )falling Pitch Falling torque in pitch axis
1
CHAPTER 1 INTRODUCTION
1.1 Background
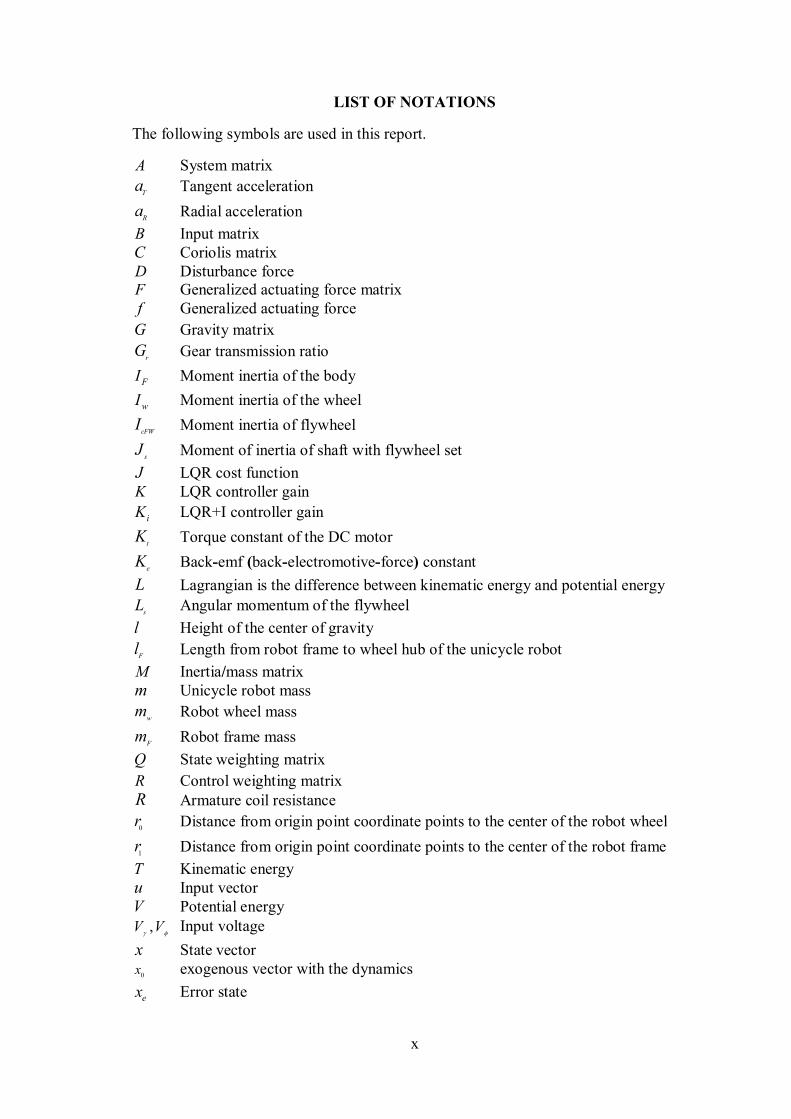
At present, mobile robots are researched and developed around the world. There are several interesting research topics of mobile robots, for example; mechanism design, control algorithm, multi-cooperative robots, etc. Working space of mobile robots can be divided into two-dimensional and three-dimensional space. Examples of mobile robot working on two-dimensional space are automated guided vehicle (AGV), which is widely used in factories and vacuum cleaner robot which is widely used in houses. This kind of robots always contact with ground. They are physically stable and do not require additional energy for balancing purpose. The research focuses for this kind of robots are about trajectory tacking, motion control, artificial intelligent (AI), multi-robots cooperation, etc. On the other hand, mobile robots working in three-dimensional space is physically unstable plan. Examples of mobile robots working in three-dimensional space are bicycle robot, ball bot, unicycle robot, jumping robot, etc. Figure 1.1 shows several types of mobile robot mentioned earlier.
Figure 1.1 (a) Automated guided vehicle (b) Vacuum cleaner robot
(c) Bicycle robot (d) Unicycle robot (e) Jumping robot
(d)
(b) (a)
(c)
(e)
2
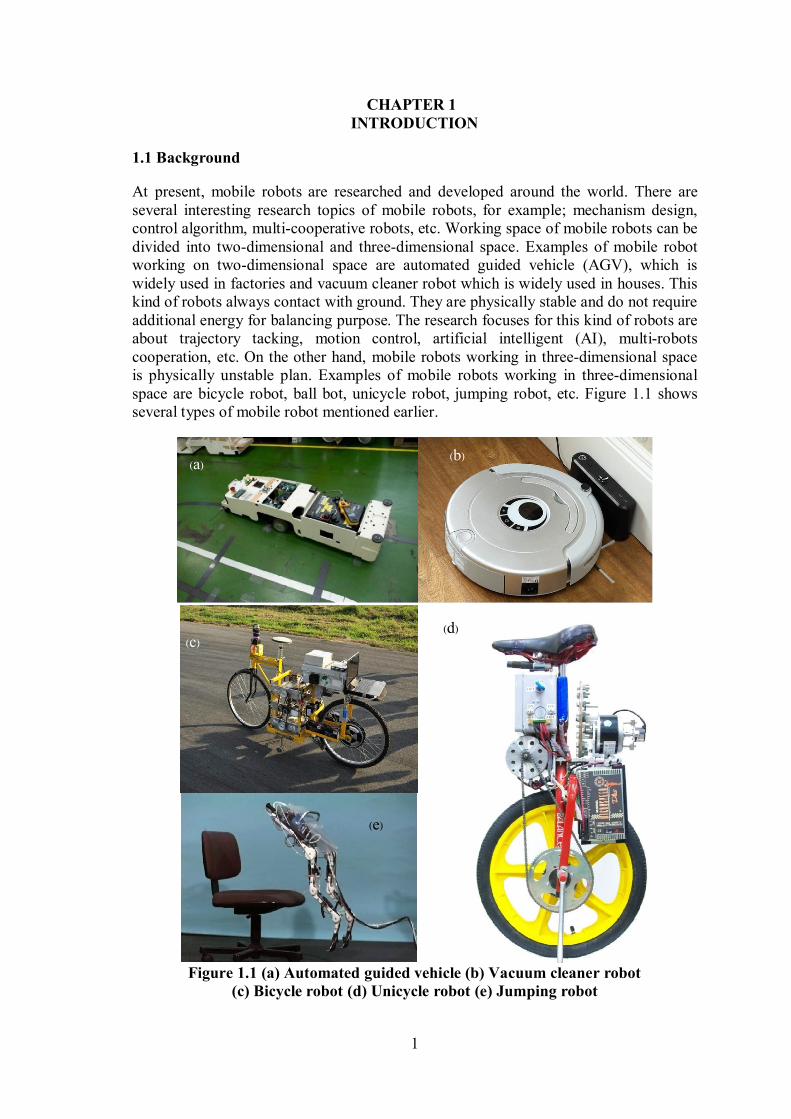
A popular research topic of mobile robot working in three-dimensional space is balancing control. The robot has to balance itself while tracking a reference trajectory. Unicycle robot is a mobile robot with a single ground contact point. It requires less space for mobility compared to bicycle robot, four-wheel/four-leg robot, etc. It is useful in an area with very limited or narrow space. There are three main parts of the unicycle robot. The first part is the robot's driving wheel which is used to drive and stabilize in longitudinal direction. The second part is the robot's body which is the main structure. The last part is the robot's stabilizer in lateral direction. The first unicycle robot applied a turntable to stabilize the robot, was developed at Stanford University, California, 1987 [1]. The researchers proposed a turntable mechanism which imitated human riding unicycle. Lateral falling was avoided by using torque to twist the robot's body (turntable). The unicycle at Stanford University is shown in figure. 1.2.
Figure 1.2 The Stanford University’s unicycle robot model [1]
Balancing techniques of unicycle robots have been developed. Unicycle robot balancing using mass balancing [3] and using gyroscope [6] were proposed and implemented. The gyroscope balancing technique applies angular momentum concept. When the direction or magnitude of angular momentum changes, precession torque is generated. Roll, pitch and yaw movements of the unicycle robot are coupled together, thus, the equations of motion of the unicycle robot are non-linear and complicated. Several control algorithms have been implemented to stabilize the unicycle robots including proportional integral and derivative control (PID), linear quadratic regulator (LQR), fuzzy sliding-mode control, etc. A new mechanism of unicycle robot using double flywheels is proposed in this research. Both flywheel sets are driven using separated actuators and rotate in opposite directions. Based on these two flywheel sets, the unicycle robot can be stabilized in roll
3
and yaw axis at the same time. As the result, the rolling and heading angles of the unicycle robot can be controlled independently. Using double flywheel sets results in more torque for roll balancing than using only one flywheel set with the same flywheel size and rotating speed. In this research, a unicycle robot with double flywheels is introduced. The robot's mechanism and electrical circuit are designed and developed. The robot is controlled using an optimal controller.
1.2 Statement of the problem
Balancing of unicycle robot is a very challenging and interesting topic for the researchers in dynamic control field because the robot is a highly non-linear and unstable system. Many unicycle robots have been developed around the world. A well-known balancing technique is the technique of angular momentum (Gyroscope) control. In this dissertation, a unicycle robot with double flywheels is introduced. Many balancing mechanisms can be applied to balance the unicycle robot. The turntable stabilizer was developed in [1, 2]. Mass balancing technique was applied in [3, 4]. Balancing using angular momentum was applied in many platforms such as mono wheel robot [9], bicycle robot [10] and also humanoid robot. Double flywheels are proposed to balance a unicycle in this research. The advantage of balancing using double flywheels is the high balancing torque. There are also some disadvantage such as many actuators are required and cross coupling between roll and yaw (heading) during balancing. Balancing of the unicycle robot with double flywheels is complicated because it requires proper synchronization of both flywheels. The flywheels are firstly spun at constant speeds along vertical axis in order to generate the required angular momentum. Change of the direction of the angular momentum axis by rotating the flywheel axis on front-back plane creates the rolling torque. The synchronization of both flywheels is important since it affects the amount of the torque in both roll and yaw directions. Both flywheels are separately controlled and located at the left and the right of the unicycle robot body. To simplify the dynamic model, the unicycle robot model was separately considered in two motion planes as applied in [3, 4, 5, 6 and 7]. By the separated consideration, the robot dynamics was decoupled. In order to determine relation between the roll and yaw axis, the unicycle robot dynamic model is derived in 3-D and referred to the fixed world coordinate. The unicycle robot is required to stabilize at the upright position and simultaneously track the way points. In this research, a unicycle robot with double flywheels is designed, developed and controlled. Linear Quadratic Regulator is proposed to balance the robot.
4
1.3 Objective
The main objectives of this research are to design a new mechanism to balance unicycle robot and to propose and design a control algorithm to control the unicycle robot. The objectives can be summarized as
To design and build a unicycle robot with double flywheels. To obtain the dynamic model of the unicycle robot. To propose an optimal control algorithm to balance the unicycle robot at upright
position and to control trajectory tracking of the robot.
1.4 Scopes and limitations
The maximum weight of the unicycle robot is 40 kg. The maximum payload is 60 kg. The maximum initial leaning angle in each axis is 5 degrees. The maximum speed of the robot along longitudinal direction is 0.1 m/s. The friction force is small and neglected. The ground field is flat and hard.

5
CHAPTER 2 LITERATURE REVIEW
2.1 Overview
Unicycle robot is a mobile robot with a single ground contact. It requires less space for mobility compared to bicycle robot, four-wheel/four-leg robot, etc. It can be useful in an area with very limited or narrow space. Balancing of this kind of robot has been a very challenging and interesting topic for the researchers in dynamic control because of a highly non-linear and unstable system of the robot. It importantly requires the controller that robustly stabilizes the robot at the upright position and simultaneously tracks the referenced command. The first unicycle robot was developed at Stanford University, California, 1987 by A. Schoowinkel [1] which applied turntable mechanism to imitate human riding unicycle. The lateral falling down of robot was avoided by the torque from twisting the robot body. However, it was unsuccessful because of insufficient torque generated by the mechanism. Eight years later, Z. Sheng and K. Yamafuji [2] improved the technique by using an asymmetric turntable that could produce greater torque. The simulation and experimental results showed that the improved unicycle robot could be balanced. It is the first success of imitating human riding unicycle. The other techniques is mass balancing, this techniques is based on changing center of mass of the robot by moving a pendulum mass. R. Nakajima et al. from Tsukuba University [3] proposed mass balancing technique for their rugby ball-shaped robot. They could balance the robot in roll axis and could control the robot steering. Y. Daud et al. [4] proposed an approach of swinging a pendulum sideward to balance the robot in roll axis. The relationship between leaning angle of the robot and pendulum angle was determined and simulated. J. H. Lee et al. from Chungnam National University [5] introduced a couple of air blowers on opposite sides of their robot in order to produce balancing force along roll axis. One of the most well-known balancing technique is based on angular momentum concept. A spinning wheel, or flywheel, is attached to the robot for maintaining angular momentum. The flywheel is accelerated or decelerated to generate balancing torque in roll axis. S. Majima et al. [6, 7] proposed a single-flywheel technique for balancing a unicycle robot. Daoxiong G. et al. [8] applied a single flywheel for stabilizing roll angle of the robot on an inclined plane. However, this technique is limited by the maximum speed and acceleration limit of the motor. Variable axis flywheel is another technique for balancing the robot. The flywheel constantly spins and maintains the angular momentum. When angular momentum is changed by rotating the flywheel axis, it thus produces the rolling torque to the robot. Y. Xu and S. K. W. Au [9] applied this technique for roll-angle balancing of a mono-wheel robot (Gyrover). Their stabilization mechanism is inside the wheel. Also, B. T. Thanh, and M. Parnichkun [10] utilized the same technique in bicycle robot, called BicyRobo. However, there exists an inherited drawback in the form of coupled rolling-heading effect.
The unicycle robot with double flywheels is a system which composes of two flywheels. The double flywheels concept is proposed to decouple roll and yaw motion which solves the problem occurs in a single flywheel system. As the result, roll and yaw of the robot can be controlled independently. Furthermore, the double flywheels can gain more rolling torque than a single flywheel.
6
2.2 Robot hardware
The unicycle robot is an unstable system. It can fall in two directions; roll and pitch directions. Therefore, stabilizer is an important part of the hardware. To maintain the robot in upright position, there are several techniques. In this section, balancing mechanisms, motors and sensors for the unicycle robot are explained.
2.2.1 Roll balancing mechanism
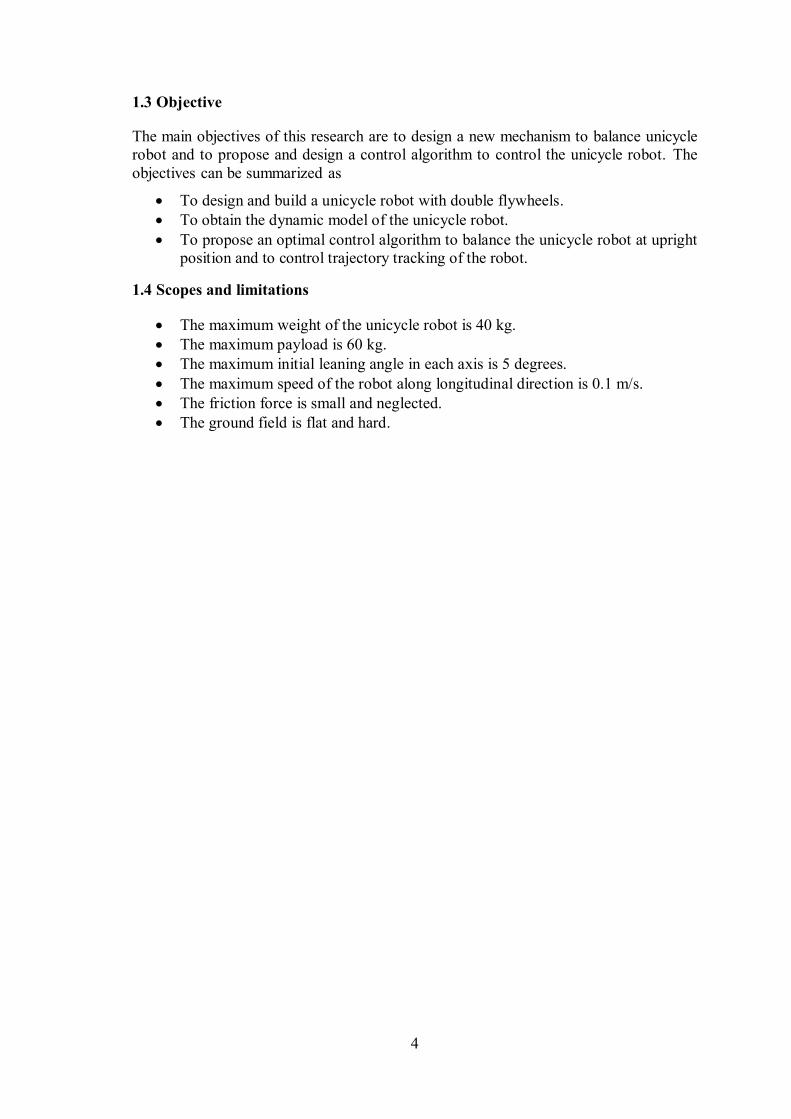
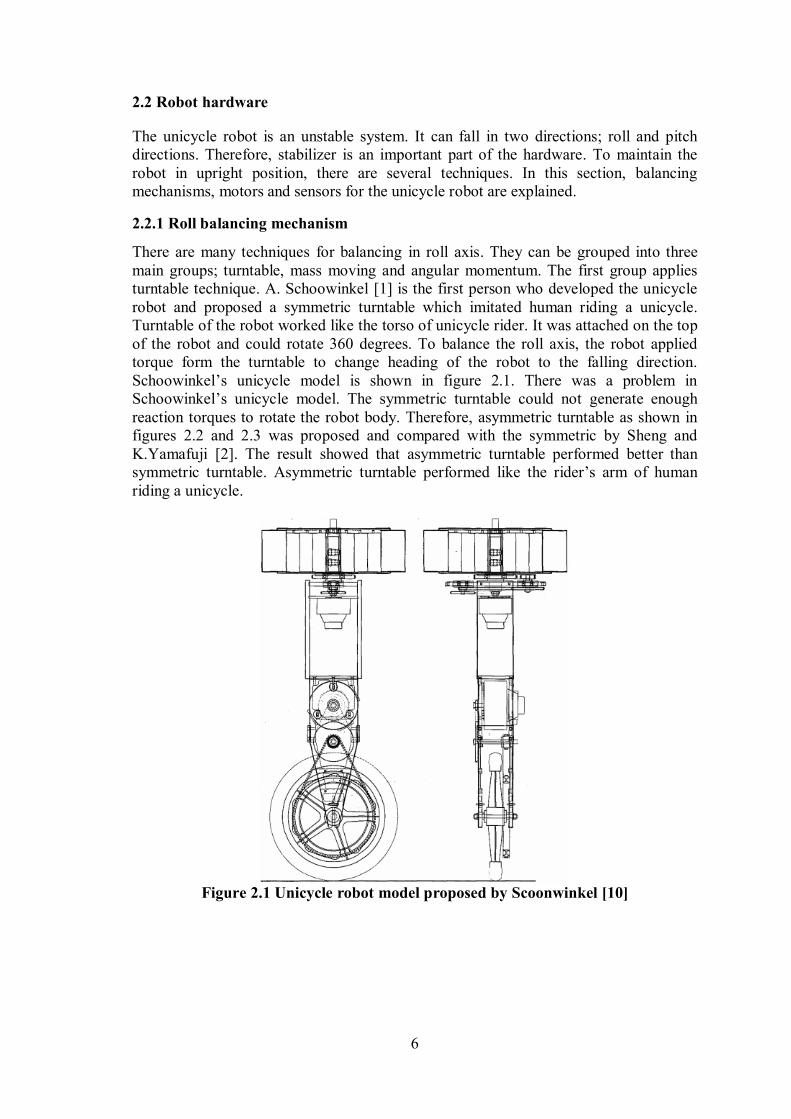
There are many techniques for balancing in roll axis. They can be grouped into three main groups; turntable, mass moving and angular momentum. The first group applies turntable technique. A. Schoowinkel [1] is the first person who developed the unicycle robot and proposed a symmetric turntable which imitated human riding a unicycle. Turntable of the robot worked like the torso of unicycle rider. It was attached on the top of the robot and could rotate 360 degrees. To balance the roll axis, the robot applied torque form the turntable to change heading of the robot to the falling direction. Schoowinkel’s unicycle model is shown in figure 2.1. There was a problem in Schoowinkel’s unicycle model. The symmetric turntable could not generate enough reaction torques to rotate the robot body. Therefore, asymmetric turntable as shown in figures 2.2 and 2.3 was proposed and compared with the symmetric by Sheng and K.Yamafuji [2]. The result showed that asymmetric turntable performed better than symmetric turntable. Asymmetric turntable performed like the rider’s arm of human riding a unicycle.
Figure 2.1 Unicycle robot model proposed by Scoonwinkel [10]
7
Figure 2.2 Unicycle robot model proposed by Yamafuji [4, 5]
Figure 2.3 (a) Symmetric rotor (b) Symmetric rotor
8
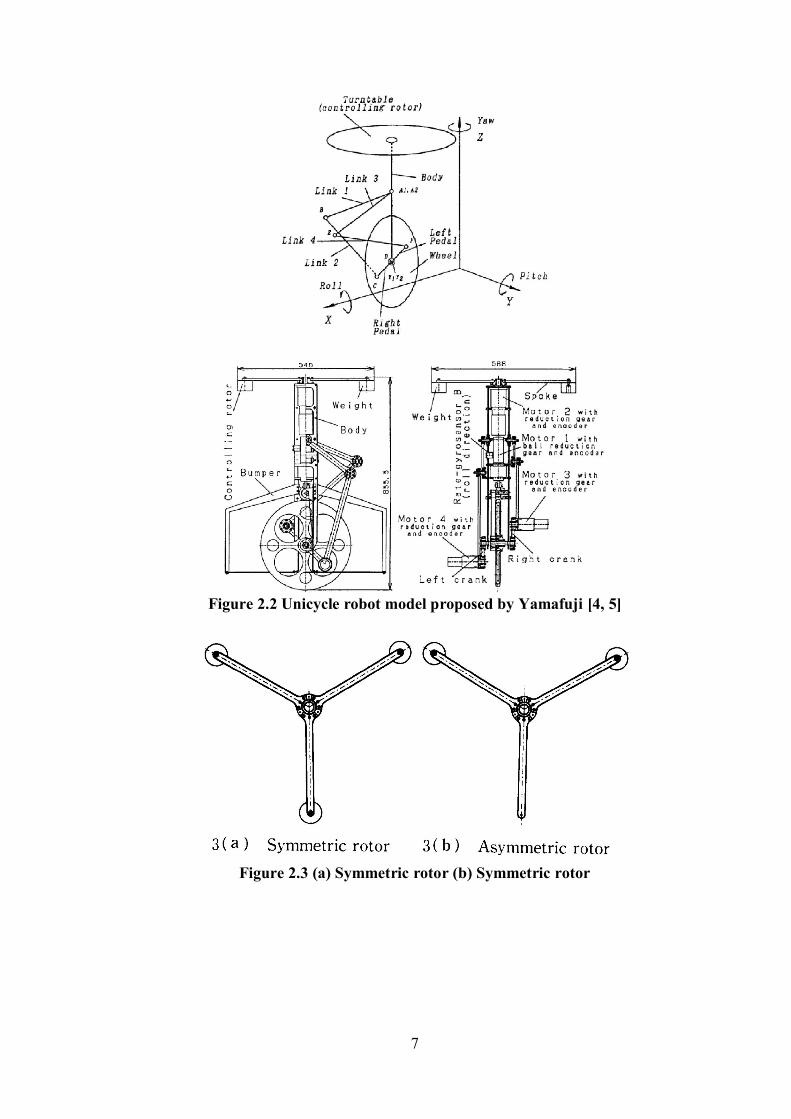
Figure 2.4 Unicycle robot developed by David W. Vos [8]
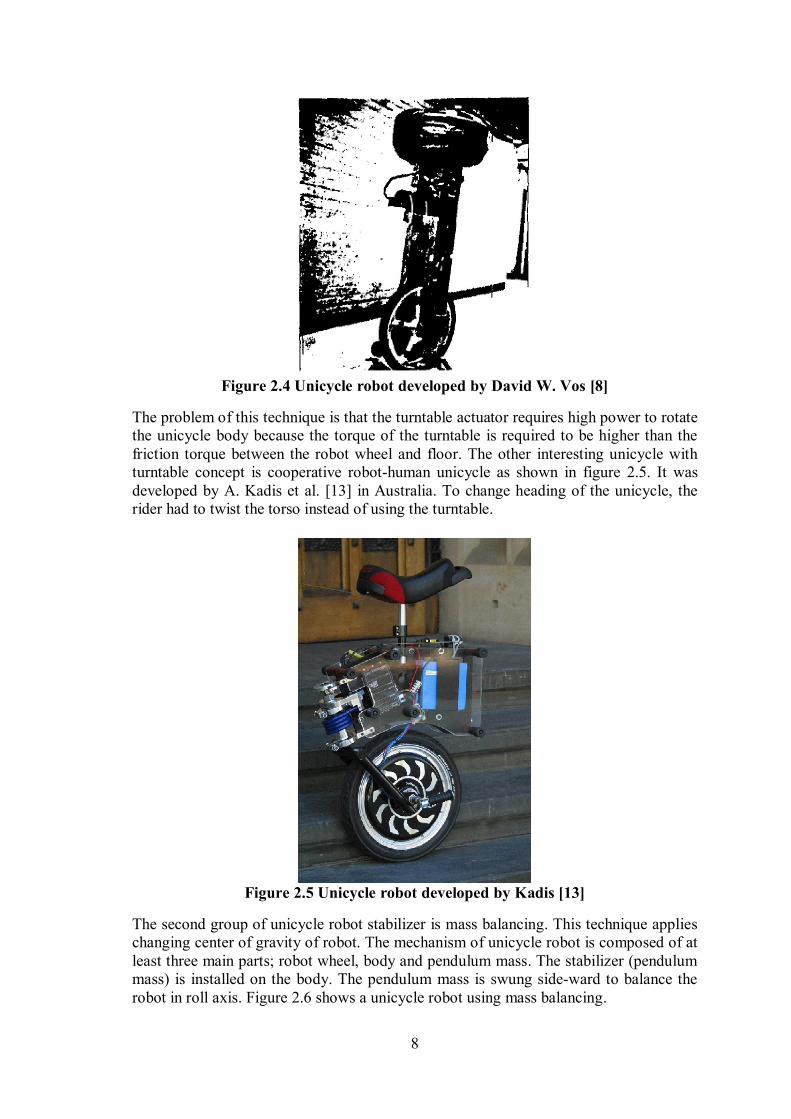
The problem of this technique is that the turntable actuator requires high power to rotate the unicycle body because the torque of the turntable is required to be higher than the friction torque between the robot wheel and floor. The other interesting unicycle with turntable concept is cooperative robot-human unicycle as shown in figure 2.5. It was developed by A. Kadis et al. [13] in Australia. To change heading of the unicycle, the rider had to twist the torso instead of using the turntable.
Figure 2.5 Unicycle robot developed by Kadis [13]
The second group of unicycle robot stabilizer is mass balancing. This technique applies changing center of gravity of robot. The mechanism of unicycle robot is composed of at least three main parts; robot wheel, body and pendulum mass. The stabilizer (pendulum mass) is installed on the body. The pendulum mass is swung side-ward to balance the robot in roll axis. Figure 2.6 shows a unicycle robot using mass balancing.
9
Figure 2.6 Unicycle robot with mass balancing [3]
The advantage of mass balancing concept is its simple structure and simple equation of motion. The robot motion can be decoupled between roll and pitch motion. Therefore, the plane of motion; frontal and sagittal planes can be separated. Since, the dynamics model can be separated, the control algorithm can be separated as well.
The last group of rolling stabilizer applies angular momentum concept. The angular momentum concept can be divided to two sub-techniques; fixed axis flywheel and variable axis flywheel. For the fixed axis flywheel, the flywheel axis is aligned with the roll axis as shown in figure 2.7. When flywheel changes its rotation speed, rolling torque is produced to balance the robot. By this technique, the motor needs to rotate the flywheel in bi-directions. With high inertia of the flywheel, high power motor is required. For the variable axis flywheel, the flywheel is spun at a constant speed. When the second flywheel axis rotates, it creates the rolling torque to balance the robot. In 2004, Y. Xu and S. K. W. Au [9] applied this technique for balancing of a mono-wheel robot (Gyrover) as shown in figure 2.8. A bicycle robot was developed by B. T. Thanh, and M. Parnichkun [10], Thailand which applied variable flywheel stabilizer to balance the robot. The flywheel was spun at a fixed high-speed, to have high angular momentum. There are some drawbacks in this design. Firstly, changing of flywheel axis does not only create torque to balance the bicycle robot but also creates torque to change the robot's heading. The second drawback is the requirement of a motor for flywheel spinning and the other motor for flywheel axis control.
10
Figure 2.7 Unicycle robot with fixed axis flywheel [8]
Figure 2.8 Mono-wheel robot (Gyrover) [9]
11
Figure 2.9 Bicycle robot with variable axis flywheel [10]
2.2.2 Pitch balancing mechanism
Most of the pitch (longitudinal) balancing apply inverted-pendulum technique. The only difference is on power transmission. Some works directly installed the motor to the wheel. Some works transferred power of the motor through gear, belt, or chain system. Daoxiong G. et al. [8] directly installed the motor to drive the robot wheel. The advantage of this technique is its simple design and no backlash. For the unicycle robot with power transmission system, the motor does not need to be installed at the wheel. Using power transmission system allows the desired torque or speed. Belt or chain tensioner is required in order to prevent backlash in the system.
2.2.3 Motor and sensor
Direct Current (DC) motors are used in the unicycle because of its simple structure, easy availability, and easy control. Gear boxes are installed with the DC motors in order to reduce speed to increase torque. Motion of the motors are sensed by encoders. By designing control rule, the DC motors are controlled to the desired positions or speeds. To control the unicycle to the upright position, the sensor which measures the robot's leaning angle is required. An inertial measurement unit (IMU) is an electrical device which can measure the leaning angle. Noise from accelerometer and drift from gyroscope are processed by using either complimentary filter or Kalman filter. A unicycle robot was developed by Z. Sheng and K. Yamafuji [2]. There was drift in leaning angle output with time and temperature changing because the leaning angle was only obtained from a gyro-sensor. A unicycle robot from Chungnam National University [5] installed a gyro-sensor and an inclinometer in order to measure leaning angle. Both sensors are different characteristic. A complementary filter was designed to fuse data from both sensors together. The fusion diagram is shown in figure 2.1. S. Majima and T. Kasai [7] installed two accelerometers attached in different locations and one gyro-sensor to their robot. To obtain leaning angle, an observer diagram shown in figure 2.11 was applied to estimate the leaning angle.
12
Figure 2.10 Sensor fusion diagram [2]
Figure 2.11 Sensor fusion diagram [7]
2.3 Dynamics model
Dynamics model is the equation of motion used to explain the behavior of dynamics system. Euler-Lagrange equation and Newton-Euler methods are widely used to derive the dynamics model. The Euler-Lagrange method applies energy analysis whereas Newton-Euler method applies force vector analysis. The dynamics model can be derived in two dimensions or three dimensions depending on the constraint of the robot.
In the previous works, several researchers of unicycle robots used the Euler-Lagrange method to derive the dynamics model. Examples of the robot model in [8] and [9] are shown in figure 2.12.
Figure 2.12 Unicycle robot model [8] and [9]
13
To obtain the dynamics model, equation 2.1 is applied.
d L L
f D qdt q q
(2.1)
Lagrangian L is the difference between kinematic energy T and potential energy V .
External force in the equation is the difference between the generalized actuating force
f and disturbance force D . The dynamics model of the robot can be rearranged as
shown in equation 2.2. When M is inertia/mass matrix, C is Coriolis matrix, G is gravity matrix, and D is disturbance matrix. The disturbance matrix combines the equivalent forces from external disturbances, frictions, and parameter uncertainties.
, M q q C q q G q D F
(2.2)
2.4 Control algorithm
There are several control algorithm applied control the unicycle robot. Proportional Integral Derivative control (PID) was implemented to the unicycle robot by J. H. Lee et al. [5]. Linear quadratic regulator (LQR) was implemented to the unicycle robot by Daoxiong G. et al. [8] and Jaeoh Lee et al. [11]. To improve the performance of LQR, LQR with integral action was implemented by Y. Daud et al. [4].
2.4.1 Proportional Integral Derivative control
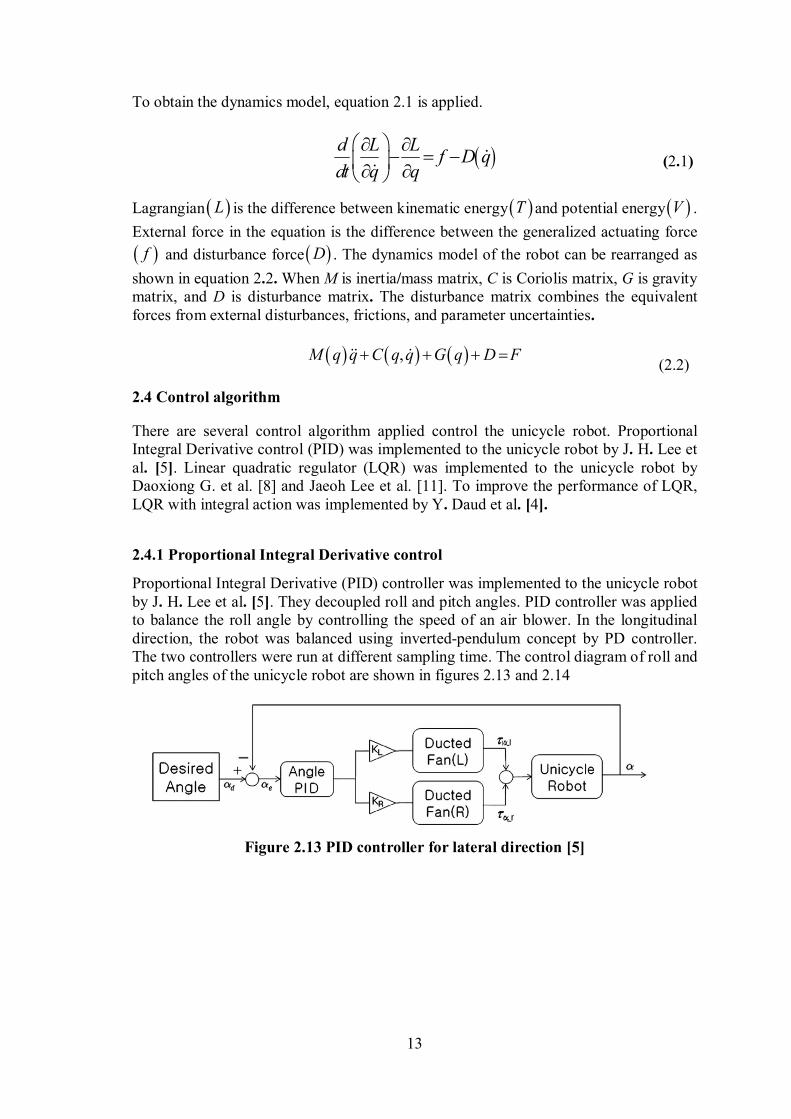
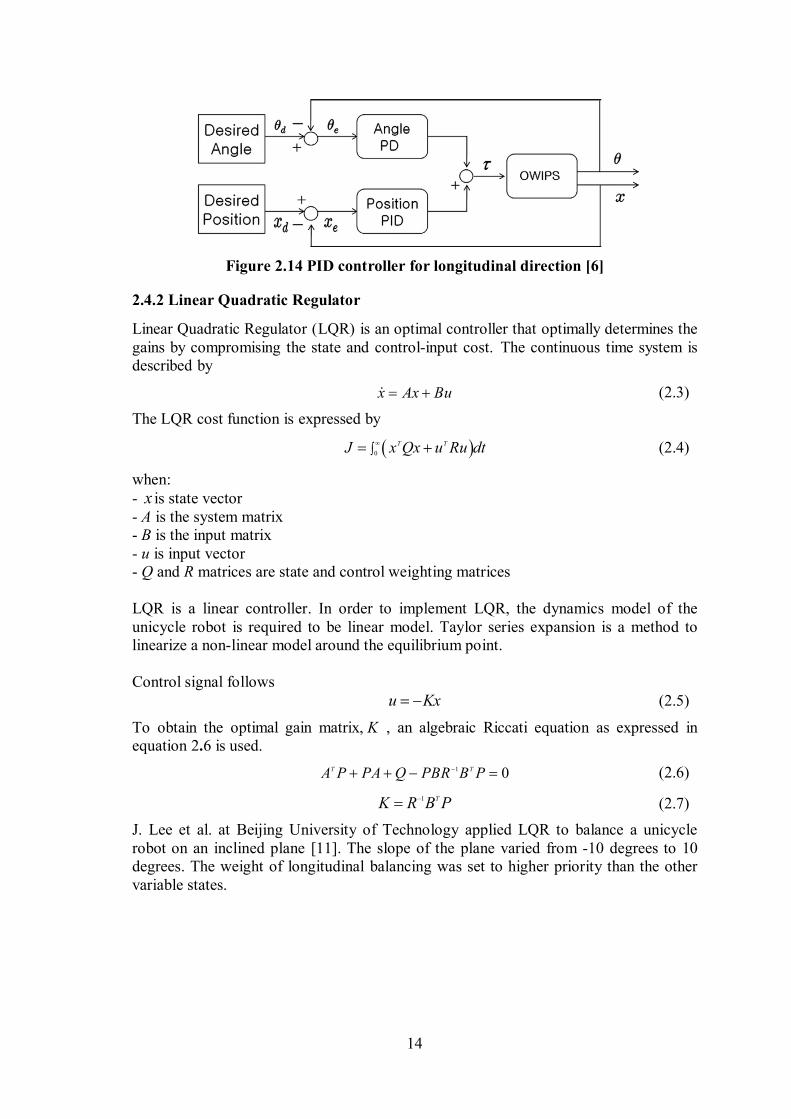
Proportional Integral Derivative (PID) controller was implemented to the unicycle robot by J. H. Lee et al. [5]. They decoupled roll and pitch angles. PID controller was applied to balance the roll angle by controlling the speed of an air blower. In the longitudinal direction, the robot was balanced using inverted-pendulum concept by PD controller. The two controllers were run at different sampling time. The control diagram of roll and pitch angles of the unicycle robot are shown in figures 2.13 and 2.14
Figure 2.13 PID controller for lateral direction [5]
14
Figure 2.14 PID controller for longitudinal direction [6]
2.4.2 Linear Quadratic Regulator
Linear Quadratic Regulator (LQR) is an optimal controller that optimally determines the gains by compromising the state and control-input cost. The continuous time system is described by
x Ax Bu (2.3)
The LQR cost function is expressed by
0
T TJ x Qx u Ru dt
(2.4)
when: - x is state vector - A is the system matrix - B is the input matrix - u is input vector - Q and R matrices are state and control weighting matrices LQR is a linear controller. In order to implement LQR, the dynamics model of the unicycle robot is required to be linear model. Taylor series expansion is a method to linearize a non-linear model around the equilibrium point. Control signal follows u Kx (2.5)
To obtain the optimal gain matrix, K , an algebraic Riccati equation as expressed in equation 2.6 is used.
1 0T TA P PA Q PBR B P (2.6)
1 TK R B P (2.7)
J. Lee et al. at Beijing University of Technology applied LQR to balance a unicycle robot on an inclined plane [11]. The slope of the plane varied from -10 degrees to 10 degrees. The weight of longitudinal balancing was set to higher priority than the other variable states.
15
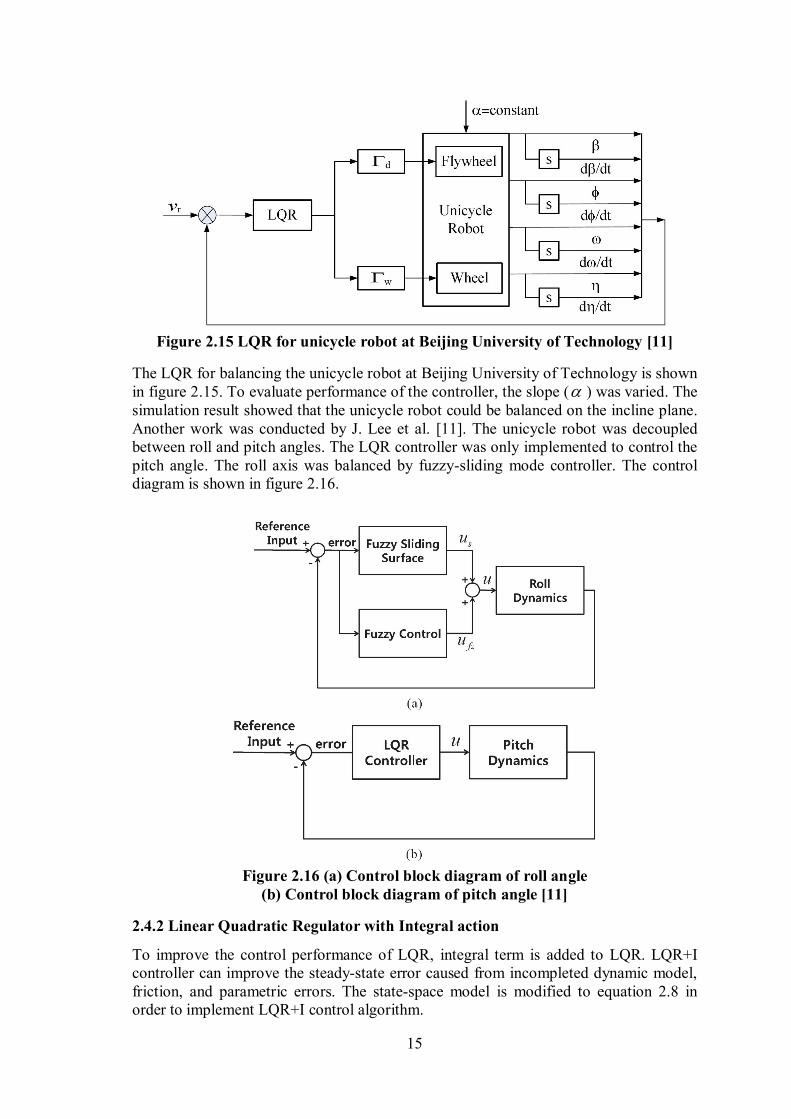
Figure 2.15 LQR for unicycle robot at Beijing University of Technology [11]
The LQR for balancing the unicycle robot at Beijing University of Technology is shown in figure 2.15. To evaluate performance of the controller, the slope ( ) was varied. The simulation result showed that the unicycle robot could be balanced on the incline plane. Another work was conducted by J. Lee et al. [11]. The unicycle robot was decoupled between roll and pitch angles. The LQR controller was only implemented to control the pitch angle. The roll axis was balanced by fuzzy-sliding mode controller. The control diagram is shown in figure 2.16.
Figure 2.16 (a) Control block diagram of roll angle
(b) Control block diagram of pitch angle [11]
2.4.2 Linear Quadratic Regulator with Integral action
To improve the control performance of LQR, integral term is added to LQR. LQR+I controller can improve the steady-state error caused from incompleted dynamic model, friction, and parametric errors. The state-space model is modified to equation 2.8 in order to implement LQR+I control algorithm.
16
0
0 0
e er
e er
x xx x A Bx u
z zx x C
Ax Bu
(2.8)
where: - is error state
- is
- is the reference input.
e
e
r
x
z edt
x
Controller gain of the LQR with Integral action is determined from an algebraic Riccati equation similar to the LQR. The control signal follows
e
i r i r
e
xu Kx K K K x x K C x x dt
z
(2.9)
Y. Daud et al. developed a unicycle robot with mass moving technique to stabilize roll angle [4]. The LQR+I was applied to control all states of the robot; such as lateral angle, longitudinal angle, pendulum angle, turning angle, and wheel angle.
2.4.3 Fuzzy Logic controller
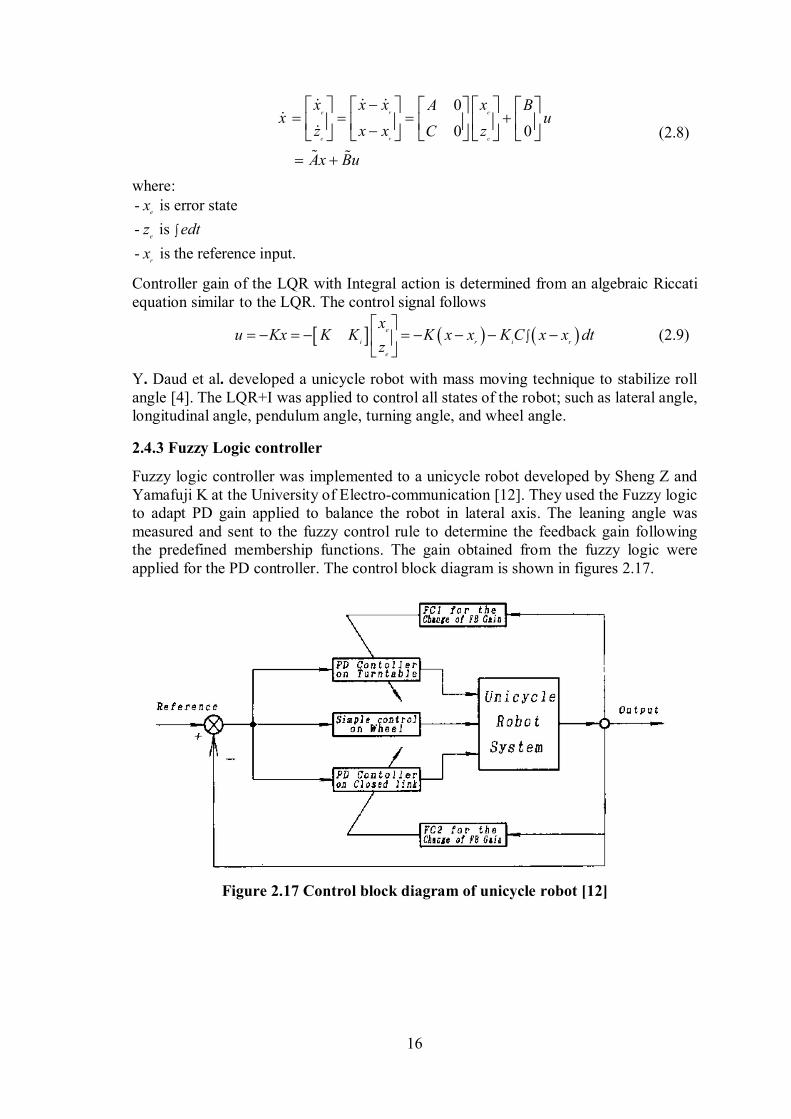
Fuzzy logic controller was implemented to a unicycle robot developed by Sheng Z and Yamafuji K at the University of Electro-communication [12]. They used the Fuzzy logic to adapt PD gain applied to balance the robot in lateral axis. The leaning angle was measured and sent to the fuzzy control rule to determine the feedback gain following the predefined membership functions. The gain obtained from the fuzzy logic were applied for the PD controller. The control block diagram is shown in figures 2.17.
Figure 2.17 Control block diagram of unicycle robot [12]
17
CHAPTER 3 UNICYCLE ROBOT HARDWARE
3.1 Conceptual design
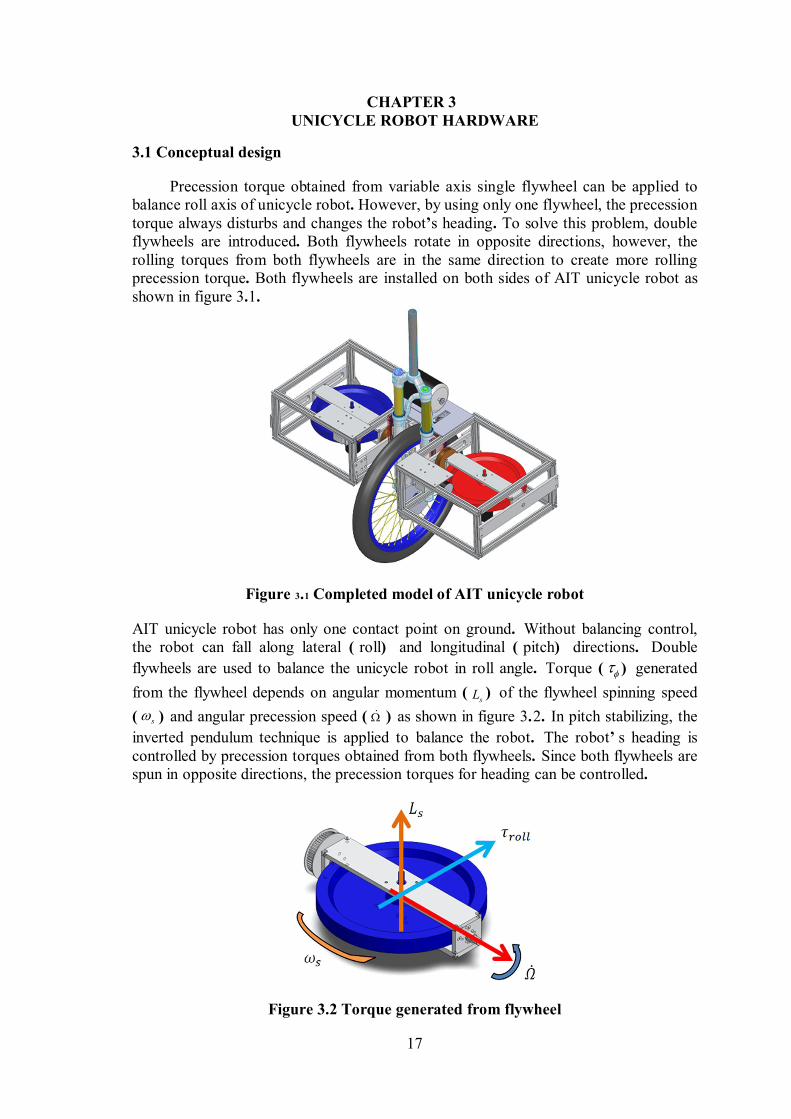
Precession torque obtained from variable axis single flywheel can be applied to balance roll axis of unicycle robot. However, by using only one flywheel, the precession torque always disturbs and changes the robot’s heading. To solve this problem, double flywheels are introduced. Both flywheels rotate in opposite directions, however, the rolling torques from both flywheels are in the same direction to create more rolling precession torque. Both flywheels are installed on both sides of AIT unicycle robot as shown in figure 3.1.
Figure �.� Completed model of AIT unicycle robot
AIT unicycle robot has only one contact point on ground. Without balancing control, the robot can fall along lateral ( roll) and longitudinal ( pitch) directions. Double
flywheels are used to balance the unicycle robot in roll angle. Torque ( ) generated
from the flywheel depends on angular momentum (sL ) of the flywheel spinning speed
( s ) and angular precession speed ( ) as shown in figure 3.2. In pitch stabilizing, the
inverted pendulum technique is applied to balance the robot. The robot’ s heading is controlled by precession torques obtained from both flywheels. Since both flywheels are spun in opposite directions, the precession torques for heading can be controlled.
Figure 3.2 Torque generated from flywheel
18
3.1.1 Motor calculation
There are two main parts of the unicycle robot: flywheel and driving wheel. The size, weight and spinning speed of the flywheels are designed to carry all the weight of the robot.
Flywheel motor calculation
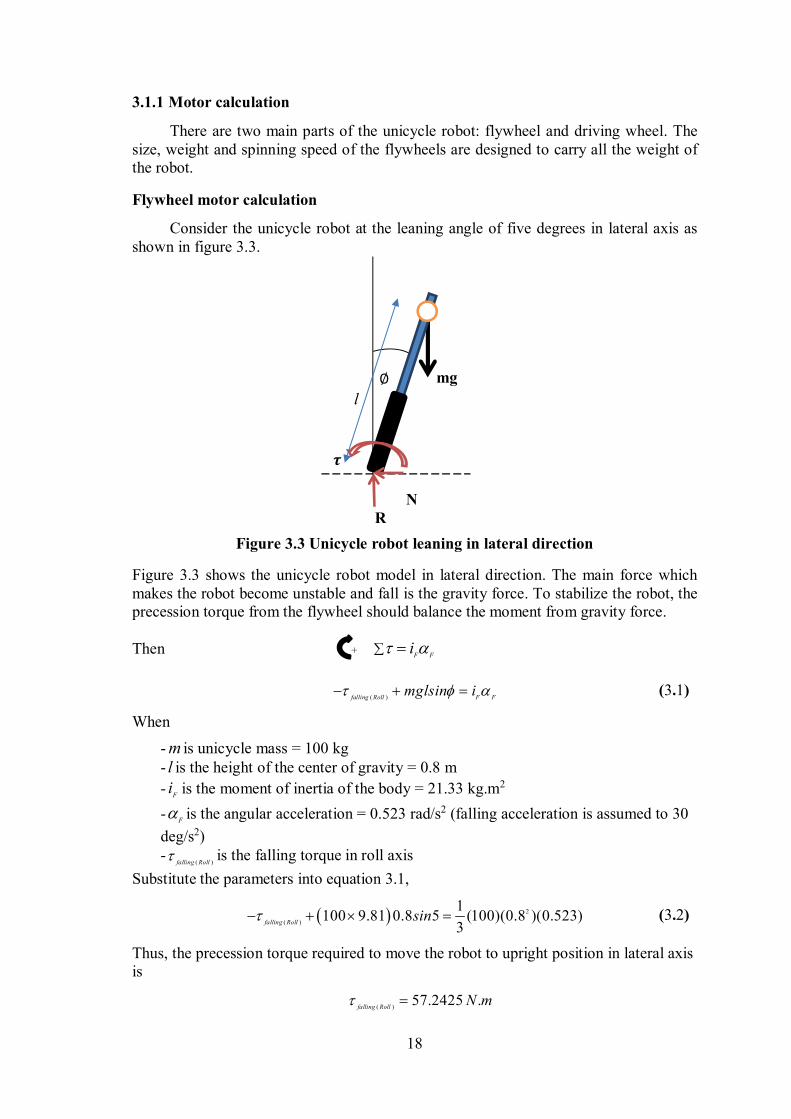
Consider the unicycle robot at the leaning angle of five degrees in lateral axis as shown in figure 3.3.
Figure 3.3 Unicycle robot leaning in lateral direction
Figure 3.3 shows the unicycle robot model in lateral direction. The main force which makes the robot become unstable and fall is the gravity force. To stabilize the robot, the precession torque from the flywheel should balance the moment from gravity force.
Then F F
i
( )falling Roll F Fmglsin i (3.1)
When
- m is unicycle mass = 100 kg - l is the height of the center of gravity = 0.8 m
-F
i is the moment of inertia of the body = 21.33 kg.m2
-F is the angular acceleration = 0.523 rad/s2 (falling acceleration is assumed to 30
deg/s2) -
( )falling Roll is the falling torque in roll axis
Substitute the parameters into equation 3.1,
2
( )
1100 9.81 0.8 5 (100)(0.8 )(0.523)
3falling Roll
sin (3.2)
Thus, the precession torque required to move the robot to upright position in lateral axis is
( )57.2425 .
falling RollN m
�
N R
mg ∅
+
l
19
The precession torque applied to balance the robot in lateral direction is generated by the flywheel. According to the design, the diameter of the flywheel is 280 mm and the weight is 6.5 Kg. Shape of the flywheel is not a standard shape. Moment of inertia of the flywheel is considered by applying composite body technique. To identify moment of inertia of the flywheel, CAD 3D program is applied to determine this value ( 0. 041 kg.m2).
Figure 3.4 Flywheel model
The precession torque from the flywheel is determined from
gyro cFW s
I (3.3)
When
- cFW
I is the moment of inertia of the flywheel = 0.041 kg.m2
- s is the angular speed of the flywheel = 1500 rpm = 157.08 rad/s (from
specification of the actuator)
- is the angular speed of precession = 60 rpm = 6.28 rad/s (from specification of the actuator) -
( )gyro is the gyro torque
Substitute the parameters into equation 3.3.
( )0.041 157.08 6.28 40.44 . .
gyroN m
From the calculation, the torque obtained from the flywheel is 40.44 Nm. The unicycle robot has two flywheels, thus, the precession torque in lateral direction becomes 80.88 N.m. The precession torque which generated from the flywheel is higher than the moment from gravity force. Thus, the robot can be balanced by the designed double flywheels.
Wheel motor calculation
In order to balance the robot in longitudinal direction, robot wheel has to rotate faster than the falling speed of the body. The moment from the gravity force is the main cause of the unbalance. Consider the initial leaning angle in longitudinal direction of five degrees.
20
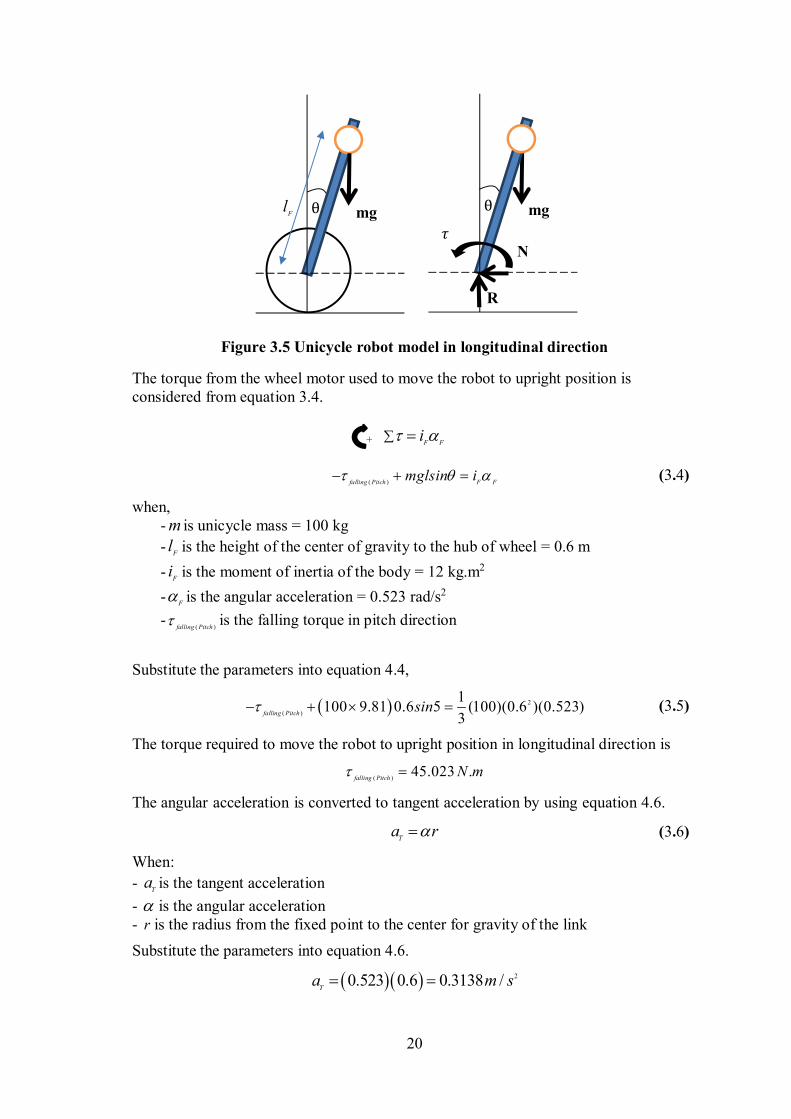
Figure 3.5 Unicycle robot model in longitudinal direction
The torque from the wheel motor used to move the robot to upright position is considered from equation 3.4.
F Fi
( )falling Pitch F F
mglsin i (3.4)
when, - m is unicycle mass = 100 kg
-F
l is the height of the center of gravity to the hub of wheel = 0.6 m
-F
i is the moment of inertia of the body = 12 kg.m2
-F is the angular acceleration = 0.523 rad/s2
-( )falling Pitch
is the falling torque in pitch direction
Substitute the parameters into equation 4.4,
2
( )
1100 9.81 0.6 5 (100)(0.6 )(0.523)
3falling Pitch
sin (3.5)
The torque required to move the robot to upright position in longitudinal direction is
( )45.023 .
falling PitchN m
The angular acceleration is converted to tangent acceleration by using equation 4.6.
T
a r (3.6)
When:
- T
a is the tangent acceleration
- is the angular acceleration - r is the radius from the fixed point to the center for gravity of the link
Substitute the parameters into equation 4.6.
20.523 0.6 0.3138 /T
a m s
θ mg
� N
R
θ mg
+
Fl
21
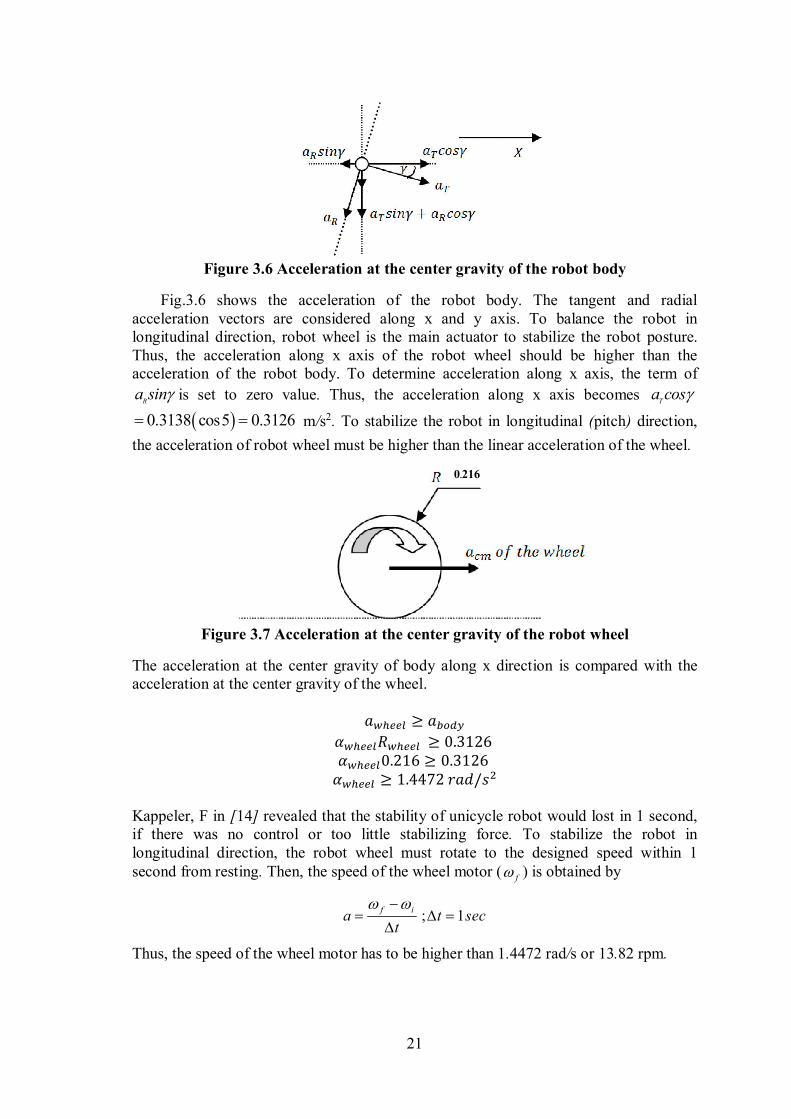
Figure 3.6 Acceleration at the center gravity of the robot body
Fig.3.6 shows the acceleration of the robot body. The tangent and radial acceleration vectors are considered along x and y axis. To balance the robot in longitudinal direction, robot wheel is the main actuator to stabilize the robot posture. Thus, the acceleration along x axis of the robot wheel should be higher than the acceleration of the robot body. To determine acceleration along x axis, the term of
Ra sin is set to zero value. Thus, the acceleration along x axis becomes
Ta cos
0.3138 cos5 0.3126 m/s2. To stabilize the robot in longitudinal (pitch) direction,
the acceleration of robot wheel must be higher than the linear acceleration of the wheel.
Figure 3.7 Acceleration at the center gravity of the robot wheel
The acceleration at the center gravity of body along x direction is compared with the acceleration at the center gravity of the wheel.
������ ≥ �����
������������ ≥ 0.3126 ������0.216 ≥ 0.3126
������ ≥ 1.4472 ���/�� Kappeler, F in [14] revealed that the stability of unicycle robot would lost in 1 second, if there was no control or too little stabilizing force. To stabilize the robot in longitudinal direction, the robot wheel must rotate to the designed speed within 1 second from resting. Then, the speed of the wheel motor ( f ) is obtained by
; 1 f i
a t sect
Thus, the speed of the wheel motor has to be higher than 1.4472 rad/s or 13.82 rpm.
0.216
22
3.2 Mechanical design
The unicycle robot consists of three main parts; driving wheel, robot body, and flywheels set. The robot wheel is made of a 20-inch bicycle wheel attaching with a disk brake. Wheel tire is made of rubber. The robot body is a mountain bike fork made of aluminum and steel. The wheel of the robot is driven by DC motor, through chain and sprocket transmission as shown in figure 3.8. A chain tensioner is installed in order to prevent backlash in chain transmission.
Figure 3.8 Driving wheel transmission system using chain
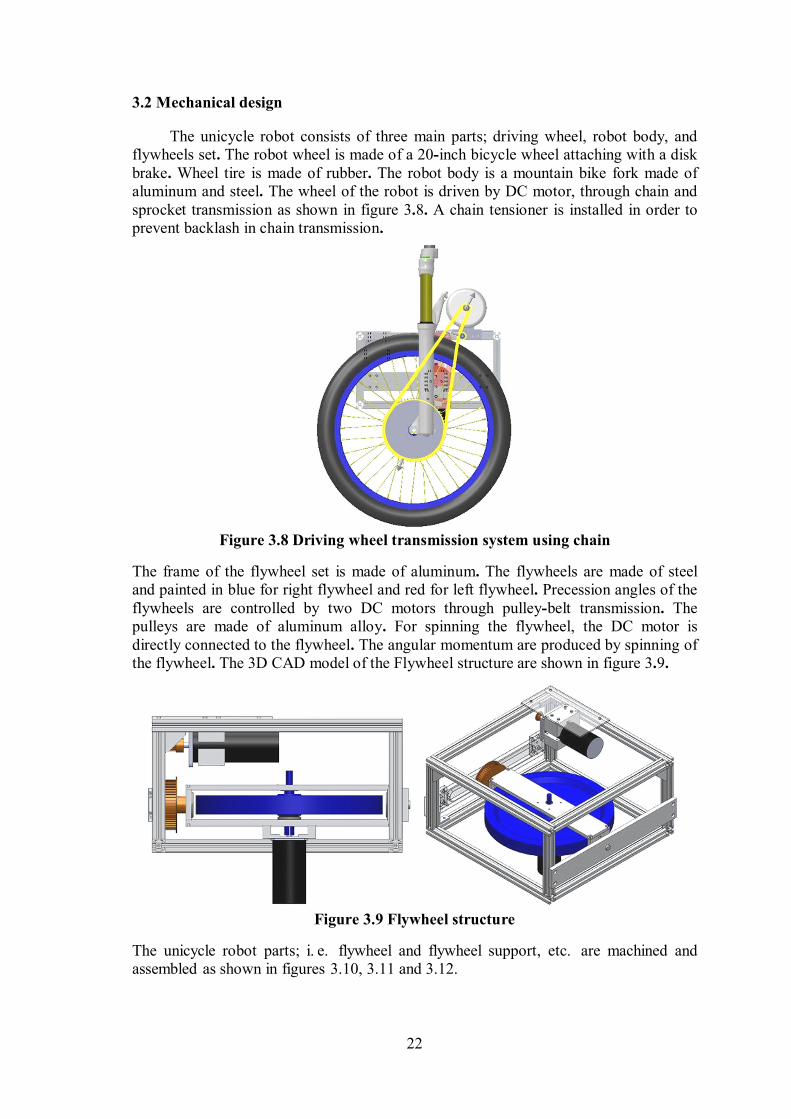
The frame of the flywheel set is made of aluminum. The flywheels are made of steel and painted in blue for right flywheel and red for left flywheel. Precession angles of the flywheels are controlled by two DC motors through pulley-belt transmission. The pulleys are made of aluminum alloy. For spinning the flywheel, the DC motor is directly connected to the flywheel. The angular momentum are produced by spinning of the flywheel. The 3D CAD model of the Flywheel structure are shown in figure 3.9.
Figure 3.9 Flywheel structure
The unicycle robot parts; i. e. flywheel and flywheel support, etc. are machined and assembled as shown in figures 3.10, 3.11 and 3.12.
23
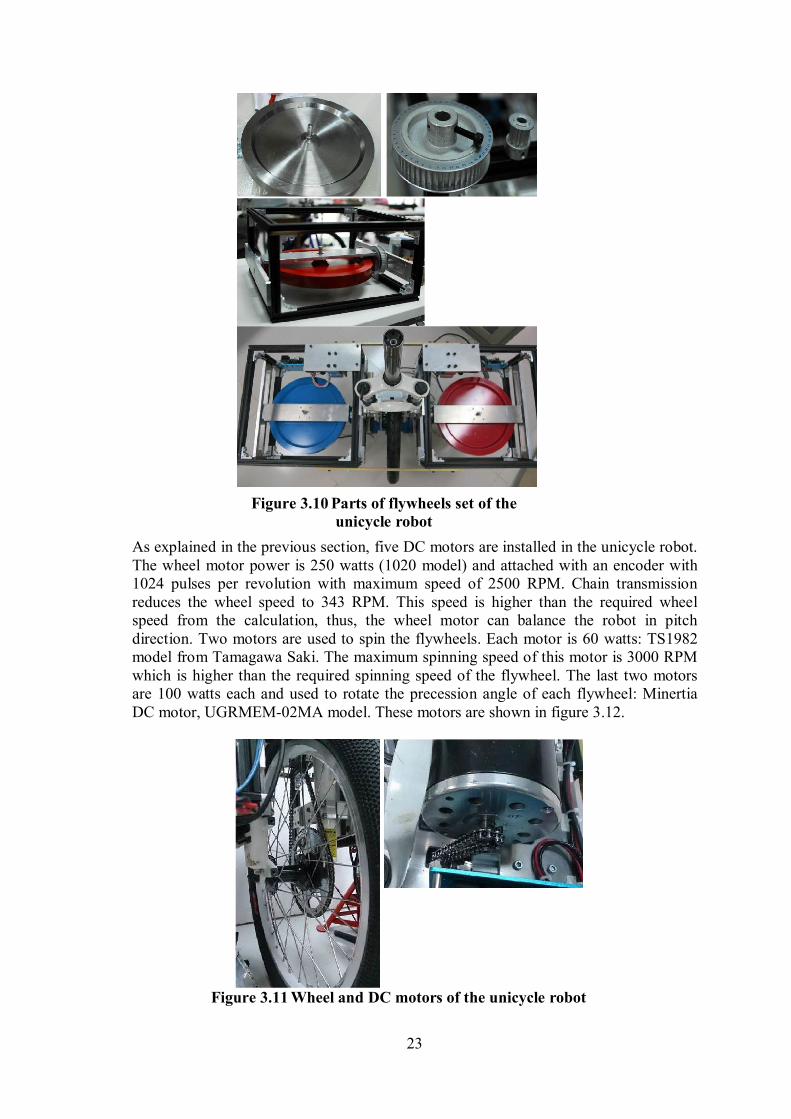
As explained in the previous section, five DC motors are installed in the unicycle robot. The wheel motor power is 250 watts (1020 model) and attached with an encoder with 1024 pulses per revolution with maximum speed of 2500 RPM. Chain transmission reduces the wheel speed to 343 RPM. This speed is higher than the required wheel speed from the calculation, thus, the wheel motor can balance the robot in pitch direction. Two motors are used to spin the flywheels. Each motor is 60 watts: TS1982 model from Tamagawa Saki. The maximum spinning speed of this motor is 3000 RPM which is higher than the required spinning speed of the flywheel. The last two motors are 100 watts each and used to rotate the precession angle of each flywheel: Minertia DC motor, UGRMEM-02MA model. These motors are shown in figure 3.12.
Figure 3.11 Wheel and DC motors of the unicycle robot
Figure 3.10 Parts of flywheels set of the unicycle robot
24
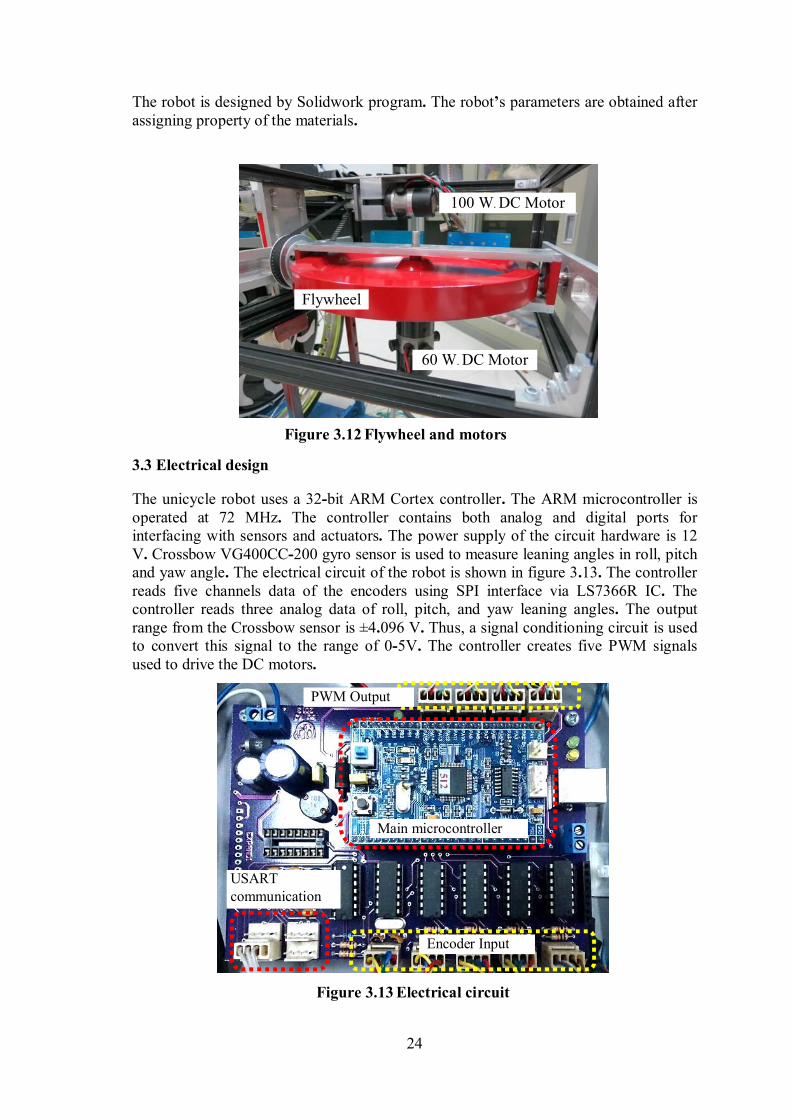
The robot is designed by Solidwork program. The robot’s parameters are obtained after assigning property of the materials.
3.3 Electrical design
The unicycle robot uses a 32-bit ARM Cortex controller. The ARM microcontroller is operated at 72 MHz. The controller contains both analog and digital ports for interfacing with sensors and actuators. The power supply of the circuit hardware is 12 V. Crossbow VG400CC-200 gyro sensor is used to measure leaning angles in roll, pitch and yaw angle. The electrical circuit of the robot is shown in figure 3.13. The controller reads five channels data of the encoders using SPI interface via LS7366R IC. The controller reads three analog data of roll, pitch, and yaw leaning angles. The output range from the Crossbow sensor is ±4.096 V. Thus, a signal conditioning circuit is used to convert this signal to the range of 0-5V. The controller creates five PWM signals used to drive the DC motors.
Encoder Input
USART communication
Main microcontroller
PWM Output
Figure 3.13 Electrical circuit
Flywheel
100 W. DC Motor
60 W. DC Motor
Figure 3.12 Flywheel and motors
25
Figure 3.15 Unicycle robot electrical schematic diagram
Gyro Sensor
Figure 3.14 Gyro sensor and electrical hardware
26
The unicycle robot electrical schematic diagram is shown in figure 3.15. All of the data; such as position of each motor and leaning angle of the robot, are fed back to the microcontroller and shown in red line. The output of the controller are the Pulse Width Modulation (PWM) signal shown in the blue line. The output signals are sent to the motor drivers for power amplification before forwarding to the DC motors.
3.4 Programing
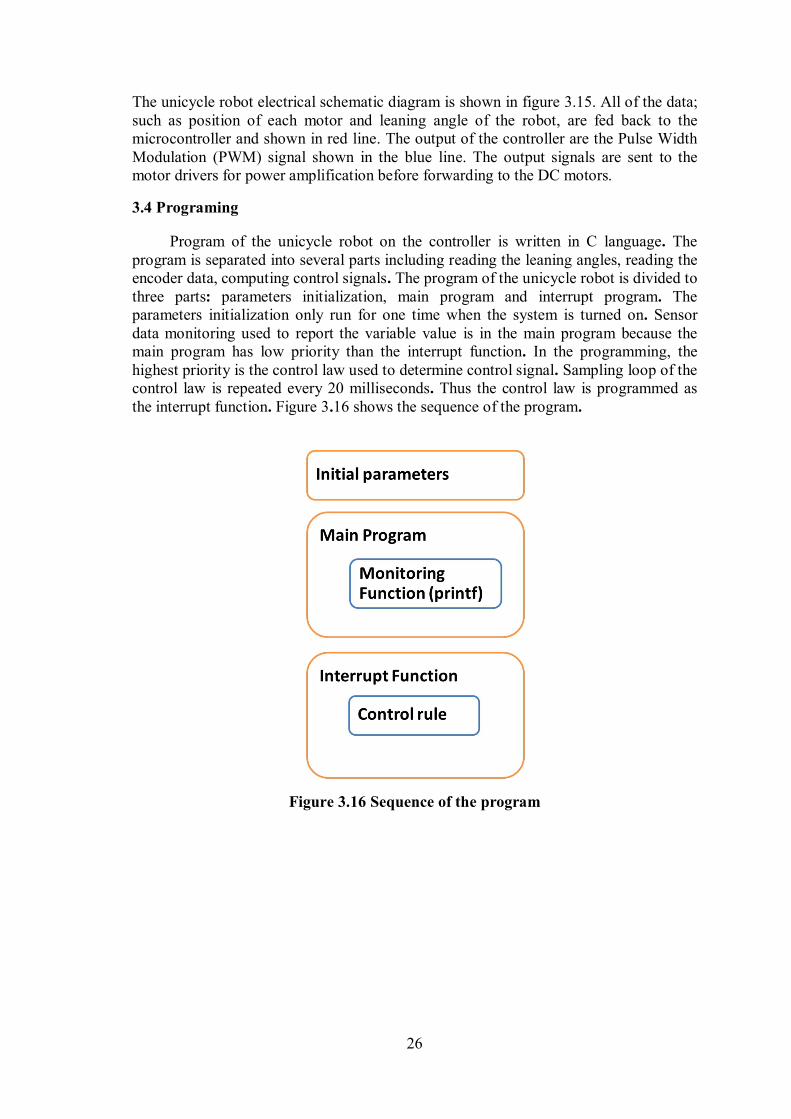
Program of the unicycle robot on the controller is written in C language. The program is separated into several parts including reading the leaning angles, reading the encoder data, computing control signals. The program of the unicycle robot is divided to three parts: parameters initialization, main program and interrupt program. The parameters initialization only run for one time when the system is turned on. Sensor data monitoring used to report the variable value is in the main program because the main program has low priority than the interrupt function. In the programming, the highest priority is the control law used to determine control signal. Sampling loop of the control law is repeated every 20 milliseconds. Thus the control law is programmed as the interrupt function. Figure 3.16 shows the sequence of the program.
Figure 3.16 Sequence of the program
27
CHAPTER 4 DYNAMIC MODEL
The unicycle robot dynamic model is derived from two separated subsystems, unicycle wheel and robot body. The Euler-Lagrange equation is applied for deriving the unicycle robot dynamic model. All friction in the unicycle robot model is assumed small and negligible.
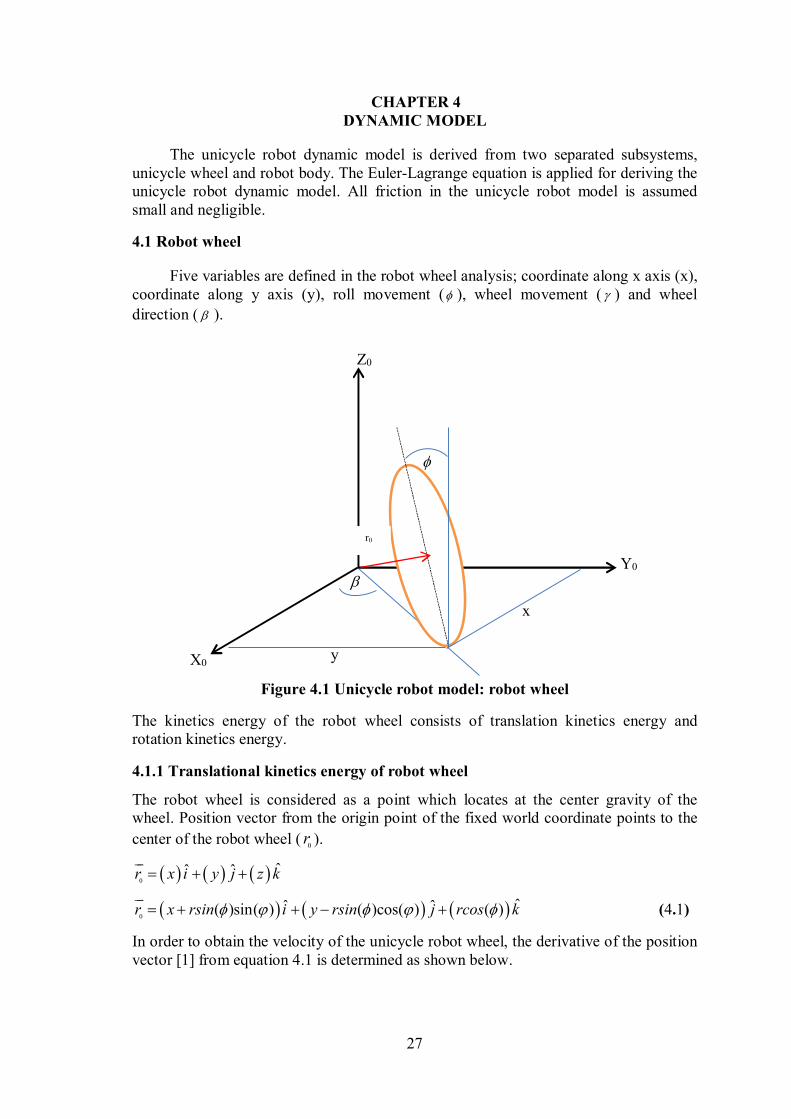
4.1 Robot wheel
Five variables are defined in the robot wheel analysis; coordinate along x axis (x), coordinate along y axis (y), roll movement ( ), wheel movement ( ) and wheel
direction ( ).
Figure 4.1 Unicycle robot model: robot wheel
The kinetics energy of the robot wheel consists of translation kinetics energy and rotation kinetics energy.
4.1.1 Translational kinetics energy of robot wheel
The robot wheel is considered as a point which locates at the center gravity of the wheel. Position vector from the origin point of the fixed world coordinate points to the
center of the robot wheel (0
r ).
0ˆ ˆ ˆr x i y j z k
0( )sin( ˆˆ ˆ) ( )cos( ) ( )r x rsin i y rsin j rcos k
(4.1)
In order to obtain the velocity of the unicycle robot wheel, the derivative of the position vector [1] from equation 4.1 is determined as shown below.
Z0
X0
Y0
y
x
r0

28
˙
0
( )sin( )( )cos( ) ( )cos( )
( )cos( )
(
ˆ
)
ˆ
ˆ
w
y rsinV r x rsin rsin i j
rcos
rsin k
(4.2)
The translational kinetics energy of the wheel is determined.
2 '2 '2 ' ' ' '
2 2 2 '2 2 2 '2 2 2 2 '2 ' '
' ' 2 2 2 '2 2 2 2 '2
1 1( 2 Cos( )Sin( ) 2 Cos( )Cos( )
2 2
Cos ( )Cos ( ) Sin ( ) Cos ( )Sin ( ) 2 Cos( )Sin( )
2 Sin( )Sin( ) Cos ( )Sin ( ) Sin ( )Sin ( ) )
tr
w w w wT m V m x y r x r y
r r r r x
r y r r
(4.3)
4.1.2. Rotational kinetics energy of robot wheel
The rotational kinetics energy of the wheel is determined form the rotational velocity (��) of the center of mass of the robot wheel [1].
21
2rot
w wT I
' 2 2 '2 ' ' 2
w1 w 3 w 2
1i Cos ( )i i ( Sin( ) )
2rot
wT (4.4)
4.1.3. Potential energy of robot wheel
The potential energy of the robot wheel is determined from the fixed reference coordinate of the height of the center mass of the wheel.
cos( )w w w
V m gr (4.5)
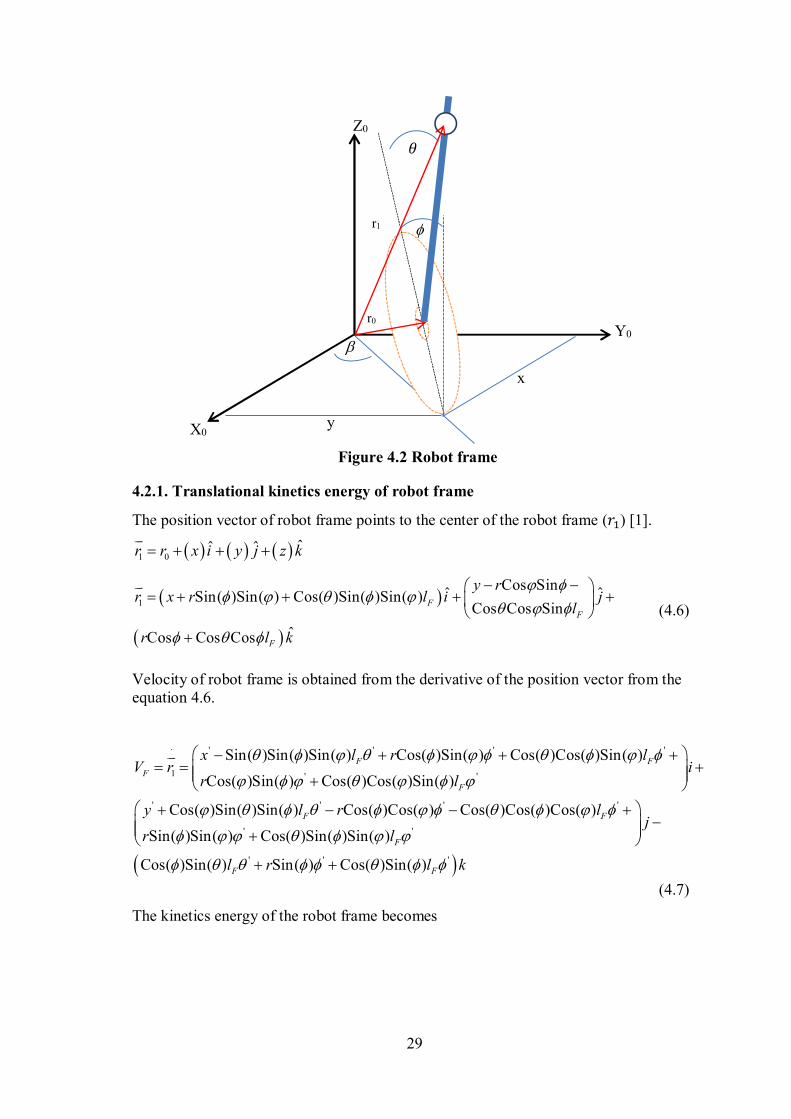
4.2 Robot frame
The second part of the unicycle robot is robot frame. The robot frame is considered as a point which locates at the center of the robot frame as shown in figure 4.2. The position vector from the origin point of the fixed world coordinate points to the center of the
robot frame (1r ). The kinetics and potential energies are determined.
29
4.2.1. Translational kinetics energy of robot frame
The position vector of robot frame points to the center of the robot frame (��) [1].
1 0ˆˆ ˆr r x i y j z k
1
Cos SinSin( )Sin( ) Cos( )Sin( )Sin( )
Cos Cos Sin
Cos C
ˆ ˆ
ˆos Cos
F
F
F
y rr x r l i j
l
r l k
(4.6)
Velocity of robot frame is obtained from the derivative of the position vector from the equation 4.6.
' ' ' '˙
1 ' '
' ' ' '
Sin( )Sin( )Sin( ) Cos( )Sin( ) Cos( )Cos( )Sin( )
Cos( )Sin( ) Cos( )Cos( )Sin( )
Cos( )Sin( )Sin( ) Cos( )Cos( ) Cos( )Cos( )Cos( )
Sin( )Sin( )
F F
F
F
F F
x l r lV r i
r l
y l r l
r
' '
' ' '
Cos( )Sin( )Sin( )
Cos( )Sin( ) Sin( ) Cos( )Sin( )
F
F F
jl
l r l k
(4.7)
The kinetics energy of the robot frame becomes
Z0
X0
Y0
y
x
r0
�
r1
Figure 4.2 Robot frame

30
2' ' ' '
' '
' ' ' '
Sin( )Sin( )Sin( ) Cos( )Sin( ) Cos( )Cos( )Sin( )
Cos( )Sin( ) Cos( )Cos( )Sin( )
Cos( )Sin( )Sin( ) Cos( )Cos( ) Cos( )Cos( )Cos( )1
2 Sin( )Sin( )
F F
F
F FtrF F
x l r l
r l
y l r lT m
r
2
' '
2' ' '
Cos( )Sin( )Sin( )
Cos( )Sin( ) Sin( ) Cos( )Sin( )
F
F F
l
l r l
(4.8)
4.2.2. Rotational kinetics energy of robot frame
The rotational kinetics energy of robot frame is determined form the rotational velocity
(F ) of the center of mass of the robot frame [1].
21
2rot
F FT I (4.9)
' ' 2 ' ' 2 ' ' 2F3 F1 F2
1 1 1i (Sin Cos Cos ) i (Cos Cos Sin ) i ( Sin )
2 2 2rot
FT
(4.10)
4.2.3. Potential energy of robot frame
The potential energy of robot frame is determined from the fixed reference coordinate of the height of the center mass of the robot frame.
F F w FV m g r cos l cos cos (4.11)
The summation of kinetics energy of the unicycle robot is expressed in equation 4.12.
2 2 2 2 2 2 2w2 F2 F1 F3 w1 w2
2 2 2F2 F1 F3 F1
0.5 0.5 0.5 os ( ) 0.5sin ( ) 0.5 sin( )
sin( ) cos( )cos( )sin( ) cos( )cos( )sin( ) 0.5cos ( )sin ( )
0.5si
tr rot tr rotw w F FT T T T
i i c i i i i
i i i i
T
T
2 2 2 2 2 2 2 2 2 2 2
2
2 2 2 2 2 2 2 2 2
F2 F3 w2 w3
0.5 0.5 0.5 0.5 cos( ) 0.25 0.25cos(2 )
0.5 sin( ) 0.5 sin( ) sin( ) 0
n ( ) 0.5cos ( )cos ( ) 0.5sin ( ) 0.5cos ( )
F F F F
F F F
F
x y l r r l l l
r l r l l
m
i i i i
2 2 2 2
2 2 2 2
2 2 2 2 2
.5 sin( )
0.5 sin( ) 0.25sin(2 ) 0.25sin(2 ) 0.25
0.25 cos(2 ) 0.5 cos( ) 0.25 cos( 2 )
0.25 cos( 2 ) 0.375 0.125cos(2 ) 0.0625c
F
F F F
F F
F F F
r l
r l l l r
r r l r l
r l l l
2 2
2 2 2 2
os 2( )
0.125cos(2 ) 0.0625cos 2( )
F
F F
l
l l

31
cos( )cos( ) sin( )sin( )sin( )
cos( )sin( ) cos( )sin( ) cos( )cos( )sin( )
cos( )cos( )sin( ) sin( )sin( )
cos( )sin( )s
cos( )cos( ) in( )sin( )
F
F
F
x r l
m
y r rs l
in( ) cos( ) in( )
cos( )cos( )cos( )
cos( )sin( ) cos( )sin( )sin( )
s
2 2
2 2 2 2
0.5 0.5 cos( )sin( ) cos( )sin( ) cos( )cos( ) sin( )sin( )
0.5 0.5sin ( )w
x y rx rym
r
(4.12)
The summation of potential energy of the unicycle robot is expressed in equation 4.13.
cos( ) cos( )cos ( ) cos( )
w F
F F w
V V V
g r l m gr m
(4.13)
where: - is the roll angle measured around x axis
- is the yaw angle measured around z axis
- is the pitch angle measured around y axis - is the robot wheel angle
-1 2 3, ,
F F Fi i i are the moments of inertia of the robot frame
-1 2 3, ,
w w wi i i are the moments of inertia of the robot wheel
- r is the radius of the wheel
-F
l is the length from robot frame to wheel hub of the unicycle robot (center gravity to
center gravity)
-w
m is the wheel mass
-F
m is the frame mass
4.3 Lagrangian and lagrange equation
Lagrange equation is an equation that describes the dynamics system using energy concept. Lagrangian ( L ) is the difference between kinetic energy (T ) and potential
energy (V ) as L K P . Lagrange equation is expressed in equation 4.14 when the friction is small and neglected.
d L L
fdt q q
(4.14)
Where: - [ , , , ]Tq
- f is the generalized forces.

32
From the Lagrange equation, there are four equations which define the dynamic model. The first equation is acquired from the derivation of roll direction ( ).
2 2
F1 F3 w2 F1 F1
2 2 2
F2 F3 F3 F1
2 cos( )sin( ) 2 cos( )sin( ) cos( ) cos ( )cos( ) sin ( )cos( )
cos( ) cos ( )cos( ) cos( )sin ( ) cos( )sin ( si) n
d L L
dt
i i i i i
i i i i
2 2
F2
2 2 2 2 2
F3 w2 w3
2
2
( ) cos( )sin( )
cos ( cos( )sin( ) cos( )sin( ) cos( )sin( ) cos( ) cos( )sin( )
cos( )cos( )sin( )cos( ) cos( ) cos( )sin( )
2 sin( ) c
)w
F F F
i
i i i rm r r
m r l r r l
2 2 2
F1 F3 w1
F3 F1
os( )cos( )
cos ( ) sin ( ) cos( ) cos( ) cos( )
cos( )cos( )sin( ) cos( )cos( )sin( ) cos( ) cos( )sin( )
sin( ) cos( ) in
w F F F F F
F F F
w F F
i i i m r r r l m l m r l
i i l m r l
rm g r l m gs
( )
(4.15) The second equation is acquired from the derivation of yaw direction ( ).
2 2 2
F1 F1 F2 F3
2 2 2
F3 F1 F3
2
F1
cos ( )cos( ) cos( )sin ( ) cos( ) cos ( )cos( )
cos( )sin ( ) cos( )sin( )sin( ) cos( )sin( )sin( )
2cos( )cos ( )sin( ) 2co
d L L
dt
i i i i
i i i
i
2 2
F3 F1
2
F2 F3 w3
2 2
2
2
s( )cos ( )sin( ) 2cos( )sin ( )sin( )
2cos( )sin( ) 2cos ( )cos( )sin( ) 2cos( )sin( )
sin(2 ) 2 cos( )sin( )
0.25cos(2 ) 0.25cos(2 ) ( 0
F w
F F
i i
i i i
r m r m
l m
2 2 2
.25sin(2 2 ) 0.5sin(2 )
( 0.5cos(2 ) cos( ) 0.5cos(2 ))0.25sin(2 2 ))
(0.5sin(2 ) 0.25sin2( ) 0.25sin2( ))
sin( )sin( ) sin( )sin( ) cos ( )sin( )F F
rl m
2
w2
2 2 2 2 2 2 2 2
sin( )sin ( )
0.5sin( 2 ) 0.5sin( 2 ) sin( ) (sin( 2 ) sin( 2 ))
cos( ) 2sin( )cos( )
cos ( )sin( ) sin( )sin ( ) cos ( )sin( ) sin( )sin ( )F F w w
F
i
r m r m r m r m
rl
2 2
w2
2
F2
2
F3 F1
2
cos( )cos ( )sin( ) cos( )sin( )sin ( ) sin( )
sin( ) sin( ) 0.5 sin( ) 0.5 sin( )
cos( )cos( )sin( ) cos( )cos( )sin( ) 0.25 sin(2 )
0.25 sin
F F F
F F F F F F
F F
F F
m rl m i
i l m rl m rl m
i i l m
l m
2 2 2 2 2 2 2 2
F1 F2 F3 w3
2 2 2 2 2 2
(2 ) 0.5 sin( ) 0.5 sin( )
cos ( )sin ( ) sin ( ) cos ( )cos ( ) cos ( ) 0.5 0.5 cos(2 )
in ( ) 0.75 0.25 cos(2 ) 0.125 cos(2( )) 0.25s
F F F F
F F
w F F F F F F F
rl m rl m
i i i i r m r m
r m l m l m l m l m
2
w2
cos(2 )
0.125 cos2( ) cos( ) 0.5 cos( 2 ) 0.5 cos( 2 )
sin( )sin( )
F
F F F F F F F Fl m rl m rl m rl m
i
(4.16)

33
The third equation is acquired from the derivation of pitch direction ( ).
2 2 2
F3 F2 F3 F3
2 2 2
2 2
F3 F12 2
cos( )sin( ) cos( ) cos ( )cos( ) cos( )sin ( )
cos( )sin( ) cos( ) cos ( ) sin ( )cos( )cos ( )sin( )
cos( )cos ( )sin( )
d L L
dt
i i i i
i i
2
2
2
2 2
2 2
0.5sin(2 ) 0.5cos(2 ) cos( ) 0.5cos(2 )
0.25sin(2 ) 0.125sin2( ) 0.125sin2( )
sin( ) sin( )sin( ) 2cos( )cos( ) 0.5sin( )
0.5cos ( )sin( ) 0.5
F F
F F
l m
m rl
2 2
2 2
F2 F2
2 2
sin( )sin ( )
sin( ) sin( ) cos( )sin( )
cos( )cos ( ) cos( )sin ( ) cos( )sin( )
F F F F F F
F F F F F F
i l m i l m rl m
rl m rl m l m g
(4.17)
The last equation is acquired from the derivation of robot wheel ( ).
2 2
w2
2 2 2
2 2
2 2
2 2
w2
2 cos( ) 2 cos( ) cos( )
sin( ) 2sin( )sin( ) 2cos( )cos( ) cos ( )sin( )
sin( )sin ( )
sin( ) sin(
F w
F F
F
F w
d L L
dt
r m r m i
rl m
r m r
r m r m i
w2
2
2
2 2
) sin( )
cos( )sin( )cos ( )
cos( )sin( )sin ( )
cos( )cos ( ) cos( )sin ( )
w
F F
F F
F F F F
m i
rl m
rl m
rl m rl m
(4.18)
The generalized torque of the unicycle robot system is defined in equation 4.19. These torques are the input control signal to the robot motors. They control all state variables of the unicycle robot.
f
(4.19)
When, -
is torque input around roll axis
- is torque input around yaw axis
- is torque input around pitch axis ( )
- is torque input to the robot wheel
34
Double flywheels are used to generate the torque acting along roll axis. Initially, each flywheel rotates at constant speed and its angular momentum ( )sL is determined from
s cFW s
L I (4.20)
In the fixed-speed flywheel, rotating of the flywheel axis affects the change of angular momentum and produces the rolling torque as expressed by equation 4.21.
s
s
dL dL
dt dt
(4.21)
Thus,
cFW s
I (4.22)
where: -
is torque output from the flywheel
-cFW
I is moment of inertia of the flywheel
-s is spinning speed of the flywheel
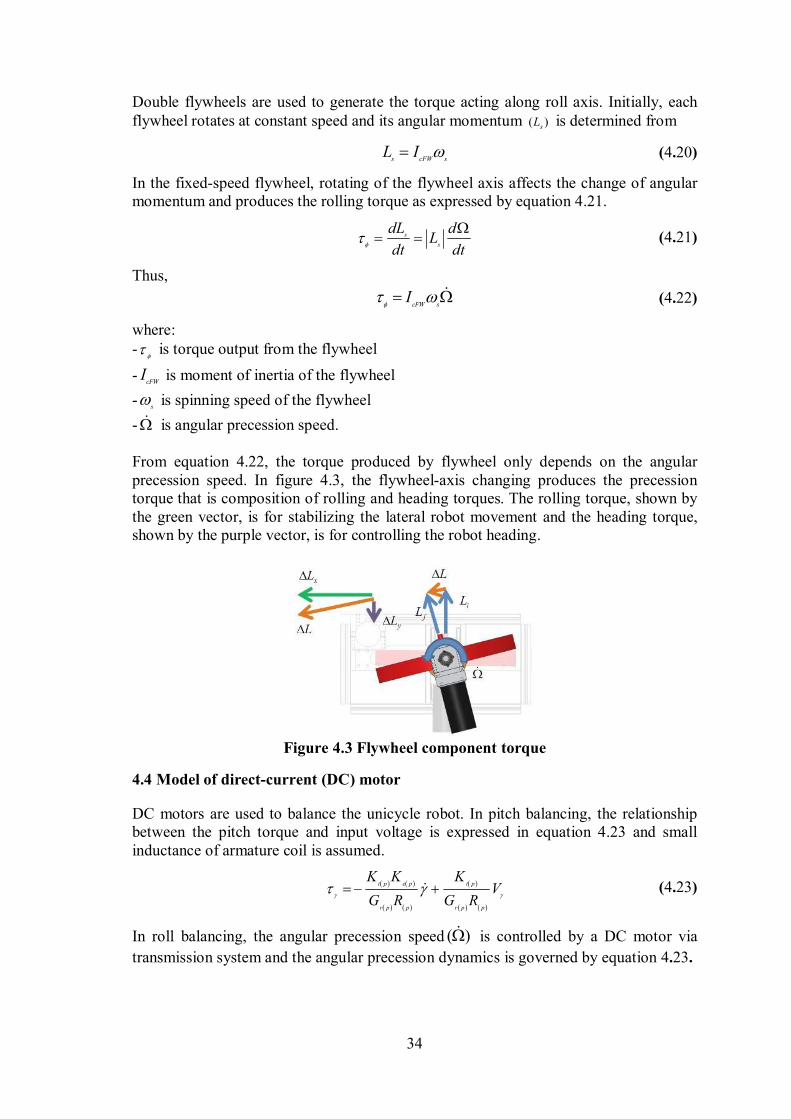
- is angular precession speed. From equation 4.22, the torque produced by flywheel only depends on the angular precession speed. In figure 4.3, the flywheel-axis changing produces the precession torque that is composition of rolling and heading torques. The rolling torque, shown by the green vector, is for stabilizing the lateral robot movement and the heading torque, shown by the purple vector, is for controlling the robot heading.
Figure 4.3 Flywheel component torque
4.4 Model of direct-current (DC) motor
DC motors are used to balance the unicycle robot. In pitch balancing, the relationship between the pitch torque and input voltage is expressed in equation 4.23 and small inductance of armature coil is assumed.
t p e p t p
r p p r p p
K K KV
G R G R
(4.23)
In roll balancing, the angular precession speed ( ) is controlled by a DC motor via
transmission system and the angular precession dynamics is governed by equation 4.23.

35
t r e r t r
r r r r r r
K K KJ V
G R G R
(4.24)
When,
- subscript r shows roll axis, subscript p shows pitch axis
- is torque from driving wheel motor
- is angular velocity of wheel motor
-t
K is torque constant of the DC motor
-e
K is back-emf (back-electromotive-force) constant
-r
G is gear ratio
- R is armature coil resistance - ,V V
is input voltage
- J is moment of inertia of shaft with flywheel set
The dynamic model of the unicycle robot can be expressed in the non-linear dynamic equation as shown in equation 4.25. The parameter “M” is inertia matrix. “C” is Coriolis matrix. “G” is gravity matrix, and “D" is disturbance matrix. The disturbance matrix combines the equivalent forces from external disturbances, frictions, and parameter uncertainties. Coulomb friction is also considered in the disturbance matrix. Since the robot operates at low speed, the viscous friction is small and negligible. This term (D matrix) is separately considered from the unicycle robot dynamic model. F is the input force matrix.
, M q q C q q G q D F (4.25)
where:
11 12 13 14 1
21 22 23 24 2
31 32 33 34 3
41 42 43 44 4
cFW
ratio
ratio
1
2
3
4
, , , 0
e
e
s
t
t
M M M M C
M M M M CM C G D
M M M M C
M M M M C
i
KF V
RG
G
G
G
KK
G
K
VRG
1
2
3
4
- sin( ) cos( ) sin( )
- 0
- cos( )sin( )
- 0
F F w
F F
G m g r l gm r
G
G g l m
G

36
2 2 2
11 F1 F3 w1
12 F1 F3
13
14
21 12
2 2
22 F1
- cos ( ) sin ( ) cos( ) cos( ) cos( )
- cos( )cos( )sin( ) cos( )cos( )sin( ) cos( )sin( ) cos( )
- 0
- 0
-
- cos ( )sin ( ) sin
F F F F F w
F F F
M i i i rm r l m l r l r m
M i i l m r l
M
M
M M
M i
2 2 2 2 2
F2 F3 w2 w3
2
2 2 2
( ) cos( )cos ( ) sin ( ) cos ( ) 0.5
0.5 cos(2 ) cos( ) 0.5 cos( 2 ) 0.5 cos( 2 )
0.75 0.25cos(2 ) 0.125cos(2( )) 0.25cos(2
F
F F F F F F F
F F F F F F
i i i i r m
m r r l m r l m r l m
l m l m l m
2
2 2 2
2
23 F2
2 2 2 2 2
24 w2
)
0.125cos(2( )) sin ( )
- sin( ) cos( )sin( ) sin( )
- sin( ) cos ( )sin( ) sin( )sin ( ) cos( )cos ( )sin( )
F F
F F w
F F F F
F F F F
l m
l m r m
M i r l m l m
M i r m r m r l m
r
2 2 2 2 2
31 13
32 23
2
33 F2
34
41 14
42
43
2 2
44 w
24
34
2
cos( )sin( )sin ( ) cos ( )sin( ) sin( )sin ( )
-
-
-
- cos( )
-
-
-
-
F F w w
F F
F F
F w
l m r m r m
M
M M
M M
M i l m
M rl m
M M
M
M
M i r m r m
M
2
1 F1 F3 w2 F1
2 2 2
F1 F2 F3 F3
2
- 2cos( )sin( ) 2cos( )sin( ) cos( ) cos ( )cos( )
cos( )sin ( ) cos( ) cos ( )cos( ) cos( )sin ( )
cos( )sin ( )sin( )
C i i i i
i i i i
i
2 2 2 2
F1 F2 F3
2 2 2
w2 w3
2
cos( )sin( ) cos ( )cos( )sin( )
cos( )sin( ) cos( )sin( ) cos( ) cos( )sin( )
cos( ) cos( )sin( ) cos( )
cos( )cos( )sin(
w
F F
F
i i
i i rm r r
r rr l m
l
2
2 2 2
2 F1 F1 F2 F3
2 2
F3 F1 F3
) 2 sin( ) cos( )cos( )
- cos ( )cos( ) cos( )sin ( ) cos( ) cos ( )cos( )
cos( )sin( ) cos( )sin( )sin( ) cos( )sin( )sin( )
C i i i i
i i i
2
2 2 2
F1 F3 F1
2
F2 F3 w3
2
2cos( )cos ( )sin( ) 2cos( )cos ( )sin( ) 2cos( )sin ( )sin( )
2cos( )sin( ) 2cos ( )cos( )sin( ) 2cos( )sin( )
sin(2 )F
i i i
i i i
r m
2
w2
2 2 2 2
2 cos( )sin( ) cos( ) 2cos( )sin( )
sin( )sin( ) sin( )sin( ) cos ( )sin( ) sin( )sin ( )
( sin( ) 0.5sin( 2 ) 0.5sin( 2 )) ( sin( 2 ) sin(
w
F F
r m i
rl m
2
2
2 ))
(0.25cos(2 ) 0.25cos(2 )) ( 0.25sin(2( )) 0.5sin(2 )
( 0.5cos(2 ) cos 0.5cos(2 )) (0.5sin(2 ) 0.25sin2( )
0.25sin2( ))
0.25sin(2( )))
F Fl m

37
2 2
3 F3 F2 F3
ratio
2 2 2
F3 F3
2 2 2
F12
- cos( )sin( ) cos( ) cos ( )cos( )
cos( )sin ( ) cos( )cos ( )sin( )
cos( )sin( ) cos( ) cos ( ) sin ( )
cos( )cos ( )sin(
e tK KC i i i
RG
i i
i
2
2
2 2 2 2 2
2
2
)
sin( ) sin( )sin( ) 2 cos( )cos( )
0.5 sin( ) 0.5 cos ( )sin( ) 0.5 sin( )sin ( )
0.5sin(2 ) (0.5cos(2 ) cos( )
0.5cos(2 ))
F F
F F
r r rl m
r r r
l m
2
2 24 w2
ratio
2
2
( 0.25sin(2 ) 0.125sin(2( ))
0.125sin(2( )))
- cos( ) 2 cos( ) 2 cos( )
sin( ) 2sin( )sin( ) 2cos( )cos( )
cos (
e tF w
F F
K KC i r m r m
RG
rl m
2 2 2)sin( ) sin( )sin ( )
4.5 Dynamic model linearization
In order to apply linear control algorithm such as LQR, LQR+I and PID controller, the non-linear dynamic model has to be linearized to linear model around zero angle or upright position. The dynamic equation is rearranged into equation 4.26.
1 ,q M q F C q q G q (4.26)
where:
1 2 3 4 5 6 7 8- = .
T T
x x x x x x x x x
Hence,
cFW
1
ratio
ratio
5
6
7
8
, ,
,
,s
t e
t e
ix f x V
K KM q C q q G qV
RG
K
x
K
G
x
VR
x
x
(4.27)

38
Then, the linearized dynamic model in equation 4.28 is obtained by using Taylor series expansion at the upright position and all states are set to zero.
, , , , , ,
, ,
, , ,
,
x f x V x f x V f x Vx
f x V VV
(4.28)
The system expanded from the Taylor series can be divided in four terms. The first term is
5
6
7
8
0, , 0
cFW
1
ratio
r
0
atio
0,
( , , ),
,
x V
s
t e
t e
x
x
x
x
x
x
x
f x V xx
i
K KM q C q q G qV
x RG
K KV
RG
0 00,,0,x V
(4.29)
The first four terms 5x
x
, 6
x
x
, 7
x
x
and 8
x
x
are zero.
The remaining term is
cFW
1
ratio
ratio
cFW
1
ratio
ratio
,
,
s
t e
t e
s
t e
t e
i
K KM q C q q G qV
x RG
K KV
RG
i
K KM q C q q G qV
x RG
K KV
RG
cFW
1
ratio
rati0 ,
o, , 000
,
s
t e
t e
x V
i
K KM q C q q G qV
x RG
K KV
RG
(4.30)
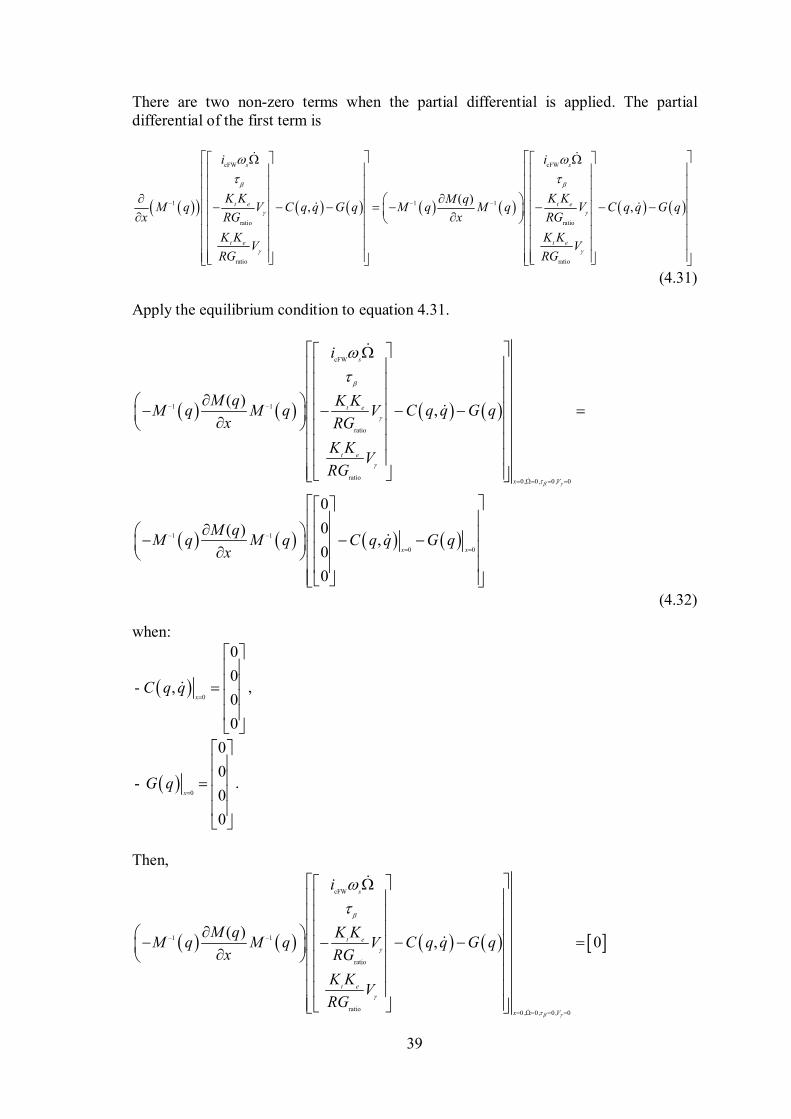
39
There are two non-zero terms when the partial differential is applied. The partial differential of the first term is
cFW cFW
1 1 1
ratio ratio
ratio ratio
( ) , ,
s s
t e t e
t e t e
i i
K K K KM qM q C q q G q M q M q C q q G qV V
x xRG RG
K K K KV V
RG RG
(4.31)
Apply the equilibrium condition to equation 4.31.
cFW
1 1
ratio
ratio0, , 0
1
0
1
0 ,
0 0
( ) ,
0
( ),
0
0
0
s
t e
t e
x V
x x
i
M q K KM q M q C q q G qV
x RG
K KV
RG
M qM q M q C q q G q
x
(4.32)
when:
0
0
0- ,
0
0
xC q q
,
0
0
0-
0
0
xG q
.
Then,
cFW
1 1
ratio
ratio0 , , 00 0,
( ) , 0
s
t e
t e
x V
i
M q K KM q M q C q q G qV
x RG
K KV
RG
40
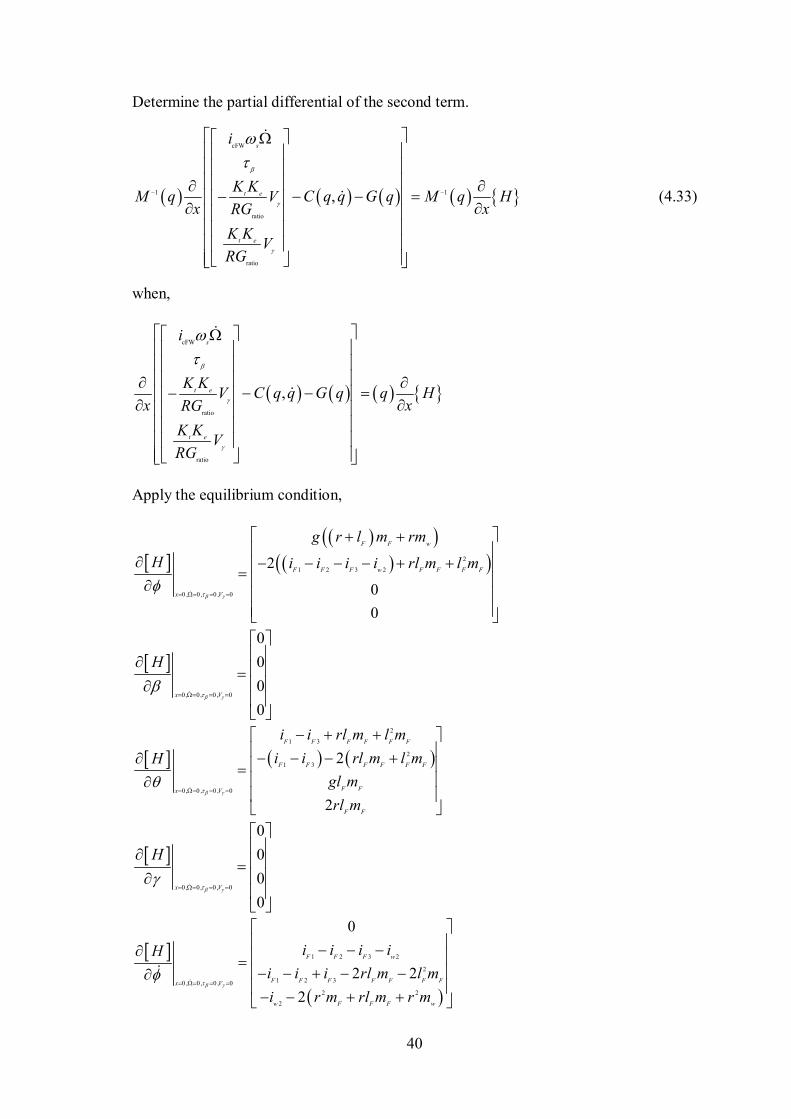
Determine the partial differential of the second term.
cFW
1 1
ratio
ratio
,
s
t e
t e
i
K KM q C q q G q M q HV
x xRG
K KV
RG
(4.33)
when,
cFW
ratio
ratio
,
s
t e
t e
i
K KC q q G q q HV
x xRG
K KV
RG
Apply the equilibrium condition,
2
1 2 3 2
0 , 00 ,,0
2
0
0
F F w
F F F w F F F F
x V
g r l m rm
H i i i i rl m l m
0, 0 ,,0 0
0
0
0
0x V
H
2
1 3
2
1 3
00, 00 ,,
2
2
F F F F F F
F F F F F F
F Fx V
F F
i i rl m l m
i i rl m l mH
gl m
rl m
0, 0 ,,0 0
0
0
0
0x V
H
1 2 3 2
2
1 2 30 , , 0
2
0
2
,
2
0
0
2 2
2
F F F w
F F F F F F Fx V
w F F F w
i i i iH
i i i rl m l m
i r m rl m r m
41
1 2 3 2
2
1 2 30 , , 0
2
0
2
2
0 ,
0
2 2
2
F F F w
F F F F F F Fx V
w F F F w
i i i i
H
i i i rl m l m
i r m rl m r m
2
2 1 3
2
0 0,
2 1 3
0 , , 0
2
0
0
F F F F F F F
F F F F F
x V
i rl m l m i i
H i i i l m
0
2 2
2
ratio0 , , 0 , 0
ratio
0
w F F F w
e t
x V
e t
i r m rl m r m
H K K
RG
K K
RG
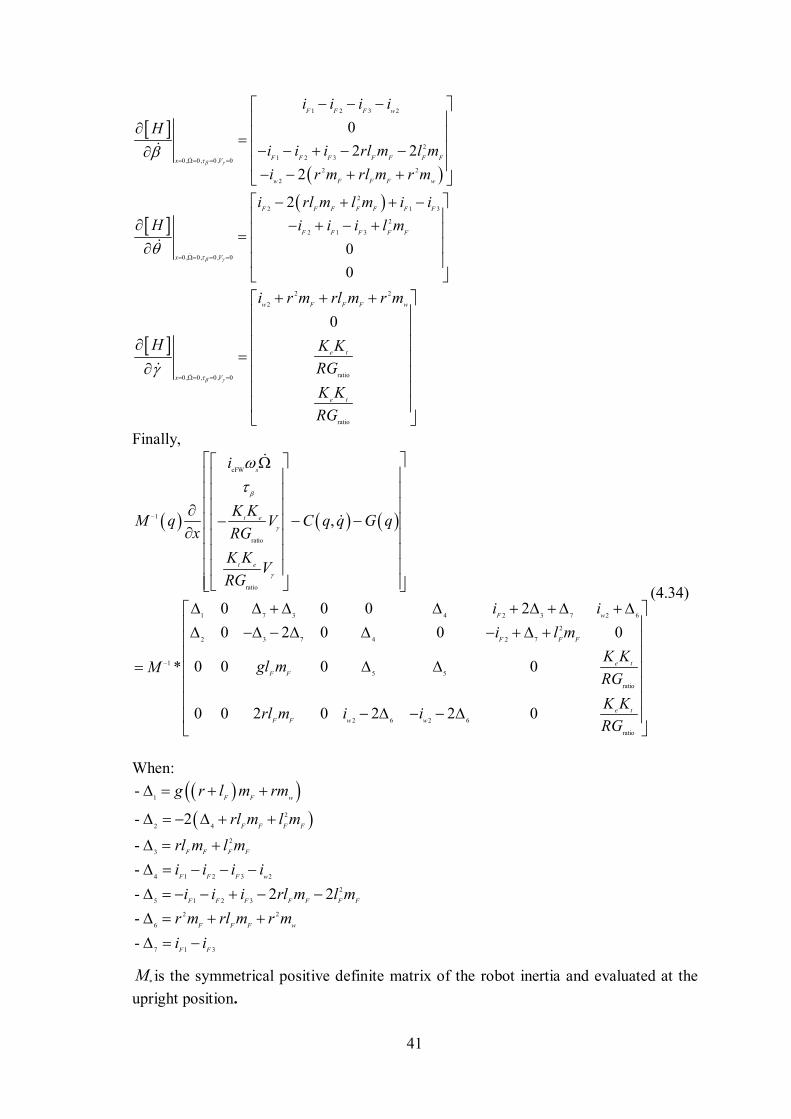
Finally,
cFW
1
ratio
ratio
1 7 3 4 2 3 7 2 6
2
2 3 7 4 2 7
1
5 5
ratio
2 6 2 6
,
0 0 0 2
0 2 0 0 0
0 0 0 0*
0 0 2 0 2 2
s
t e
t e
F w
F F F
e t
F F
F F w w
i
K KM q C q q G qV
x RG
K KV
RG
i i
i l m
K Kgl mM
RG
rl m i i
ratio
0 e tK K
RG
(4.34)
When:
1
2
2 4
2
3
4 1 2 3 2
2
5 1 2 3
2 2
6
7 1 3
-
- 2
-
-
- 2 2
-
-
F F w
F F F F
F F F F
F F F w
F F F F F F F
F F F w
F F
g r l m rm
rl m l m
rl m l m
i i i i
i i i rl m l m
r m rl m r m
i i
*M is the symmetrical positive definite matrix of the robot inertia and evaluated at the
upright position.
42
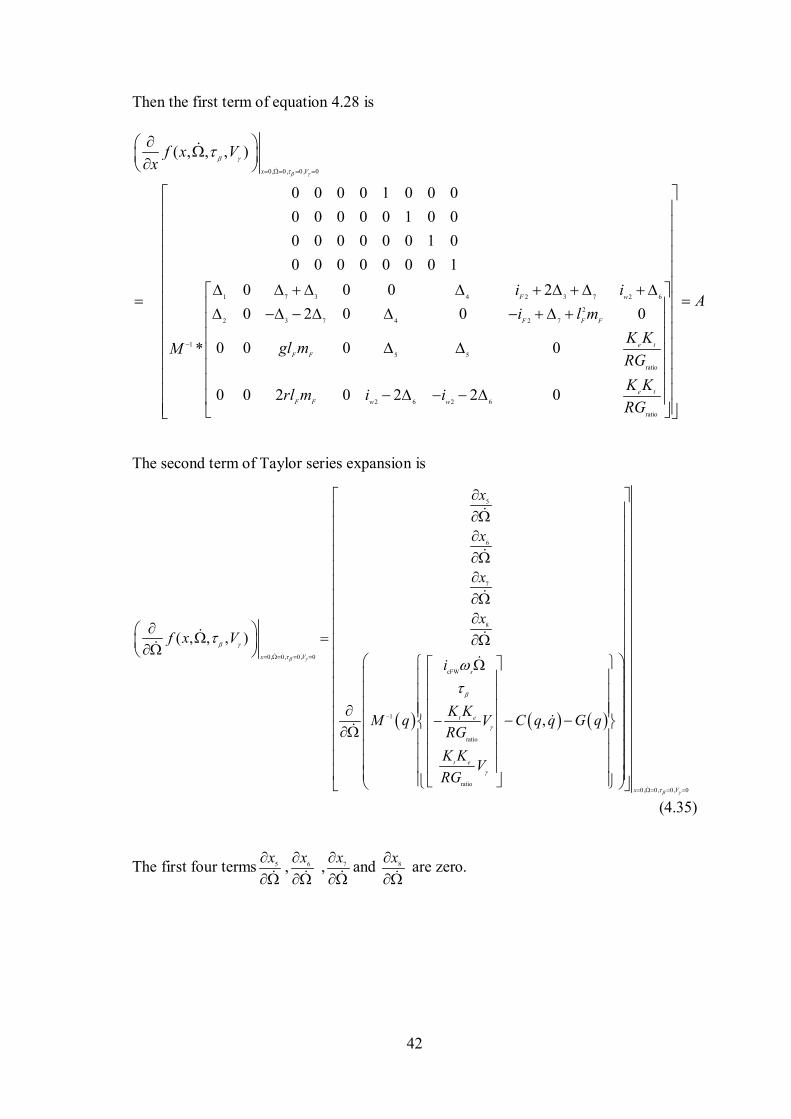
Then the first term of equation 4.28 is
0, , 0
1 7 3 4
0
2 3 7 2 6
2
2 3 7 4 2 7
1
5 5
0 ,
ratio
( , , )
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
0 0 0 2
0 2 0 0 0
0 0 0 0*
0 0 2 0
,x V
F w
F F F
e t
F F
F F
f x Vx
i i
i l m
K Kgl mM
RG
rl m
2 6 2 6
ratio
2 2 0 e t
w w
A
K Ki i
RG
The second term of Taylor series expansion is
5
6
7
8
0, , 0
cFW
1
ra
0 0,
tio
ratio
( , , )
,
,x V
s
t e
t e
x
x
x
x
f x V
i
K KM q C q q G qV
RG
K KV
RG
0, 0 0, 0,x V
(4.35)
The first four terms 5x
, 6
x
, 7
x
and 8
x
are zero.
43
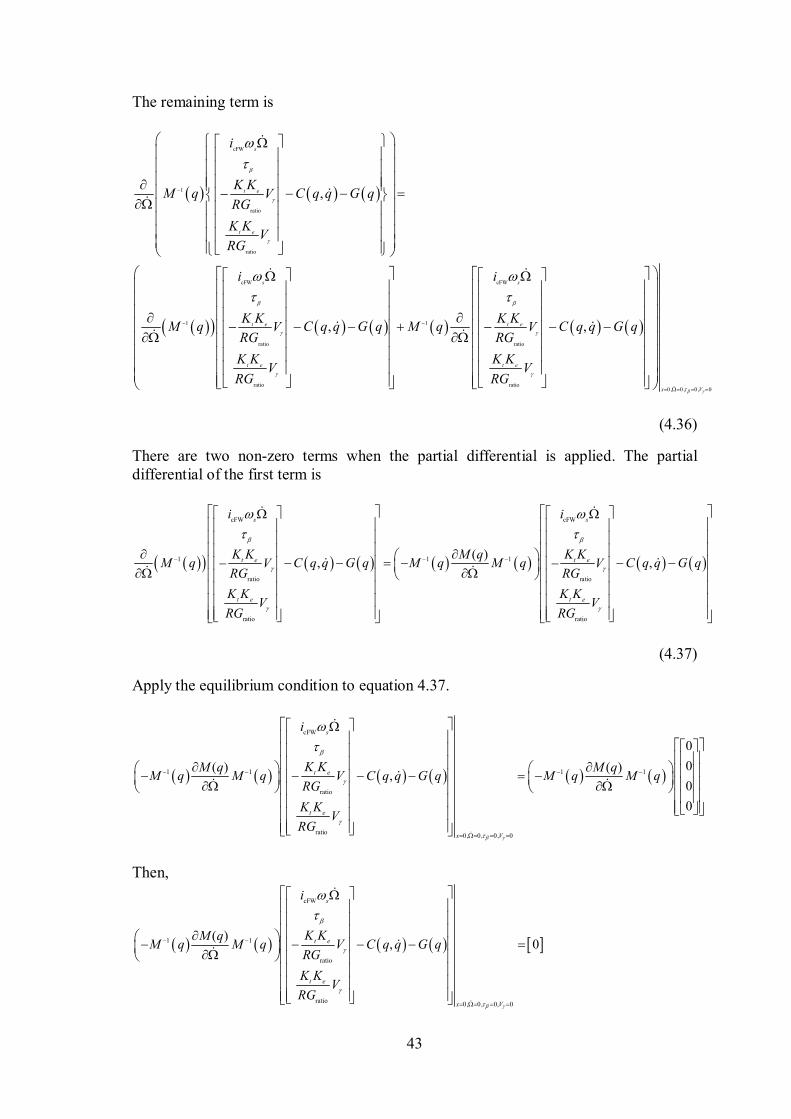
The remaining term is
cFW
1
ratio
ratio
cFW
1
ratio
ratio
,
,
s
t e
t e
s
t e
t e
i
K KM q C q q G qV
RG
K KV
RG
i
K KM q C q q G qV
RG
K KV
RG
0 0
cFW
1
ratio
rati,
o0 , , 0
,
s
t e
t e
x V
i
K KM q C q q G qV
RG
K KV
RG
(4.36)
There are two non-zero terms when the partial differential is applied. The partial differential of the first term is
cFW cFW
1 1 1
ratio ratio
ratio ratio
( ) , ,
s s
t e t e
t e t e
i i
K K K KM qM q C q q G q M q M q C q q G qV V
RG RG
K K K KV V
RG RG
(4.37)
Apply the equilibrium condition to equation 4.37.
cFW
1 1 1 1
ratio
ratio0, 0 0,, 0
0
( ) ( ) ,
0
0
0
s
t e
t e
x V
i
K KM q M qM q M q C q q G q M q M qV
RG
K KV
RG
Then,
cFW
1 1
ratio
ratio0, 00 0,,
( ) , 0
s
t e
t e
x V
i
K KM qM q M q C q q G qV
RG
K KV
RG
44
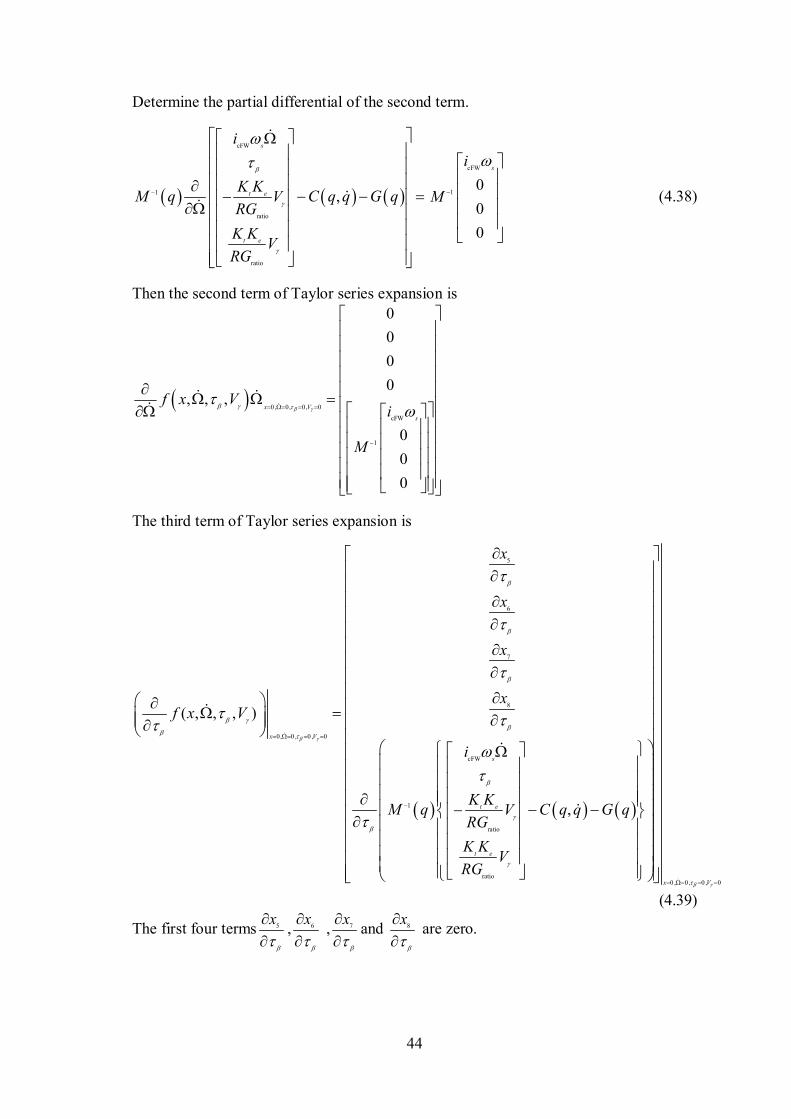
Determine the partial differential of the second term.
cFW
1
ratio
ratio
,
s
t e
t e
i
K KM q C q q G qV
RG
K KV
RG
cFW
1
0
0
0s
i
M
(4.38)
Then the second term of Taylor series expansion is
0 0,0 , , 0
cFW
1
,
0
0
0
0, ,
0
0
0
x V
s
f x Vi
M
The third term of Taylor series expansion is
5
6
7
8
0, , 0
cFW
1
rat
0 0
io
ratio
,
( , ,
, )
,
x V
s
t e
t e
x
x
x
xf x V
i
K KM q C q q G qV
RG
K KV
RG
0 , 0 0 ,, 0x V
(4.39)
The first four terms 5x
, 6
x
, 7
x
and 8
x
are zero.
45
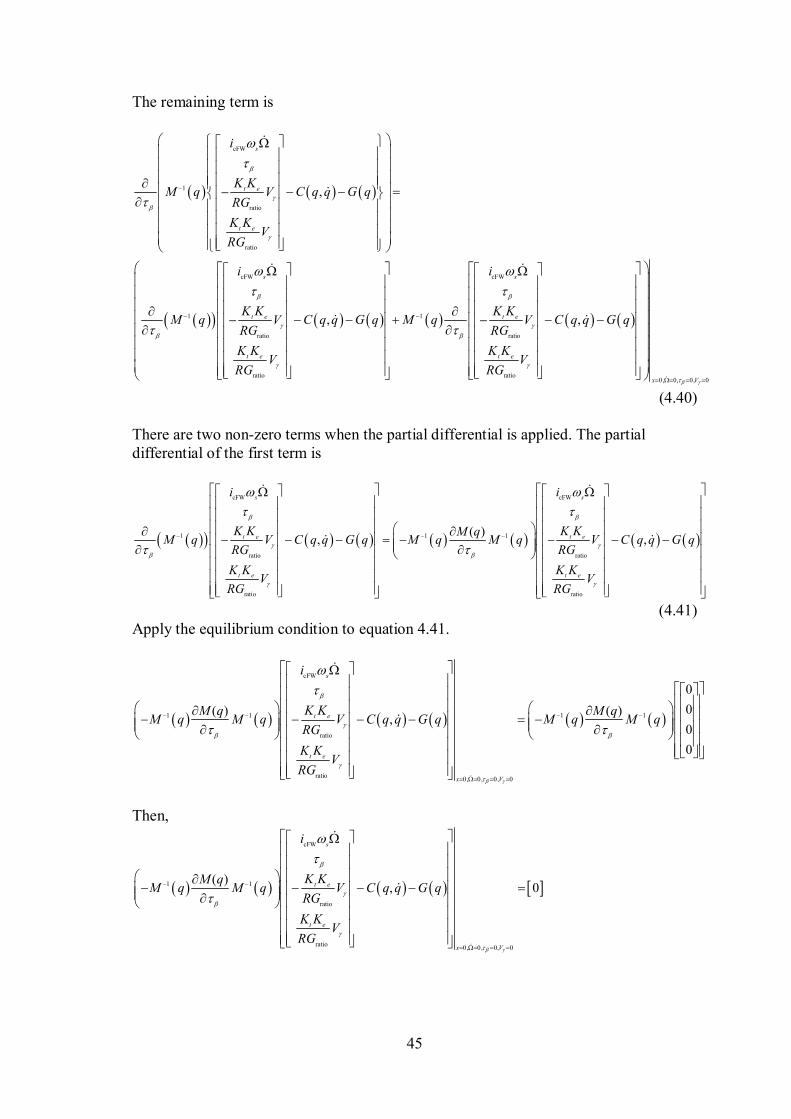
The remaining term is
cFW
1
ratio
ratio
cFW
1
ratio
ratio
,
,
s
t e
t e
s
t e
t e
i
K KM q C q q G qV
RG
K KV
RG
i
K KM q C q q G qV
RG
K KV
RG
cFW
1
ratio
ratio0, 0,,0 0
,
s
t e
t e
x V
i
K KM q C q q G qV
RG
K KV
RG
(4.40)
There are two non-zero terms when the partial differential is applied. The partial differential of the first term is
cFW cFW
1 1 1
ratio ratio
ratio ratio
( ) , ,
s s
t e t e
t e t e
i i
K K K KM qM q C q q G q M q M q C q q G qV V
RG RG
K K K KV V
RG RG
(4.41) Apply the equilibrium condition to equation 4.41.
cFW
1 1 1 1
ratio
ratio0, 0 0, 0,
0
( ) ( )
0
0
0,
s
t e
t e
x V
i
K KM q M qM q M q C q q G q M q M qV
RG
K KV
RG
Then,
cFW
1 1
ratio
ratio0, ,0 00,
( ) , 0
s
t e
t e
x V
i
K KM qM q M q C q q G qV
RG
K KV
RG
46
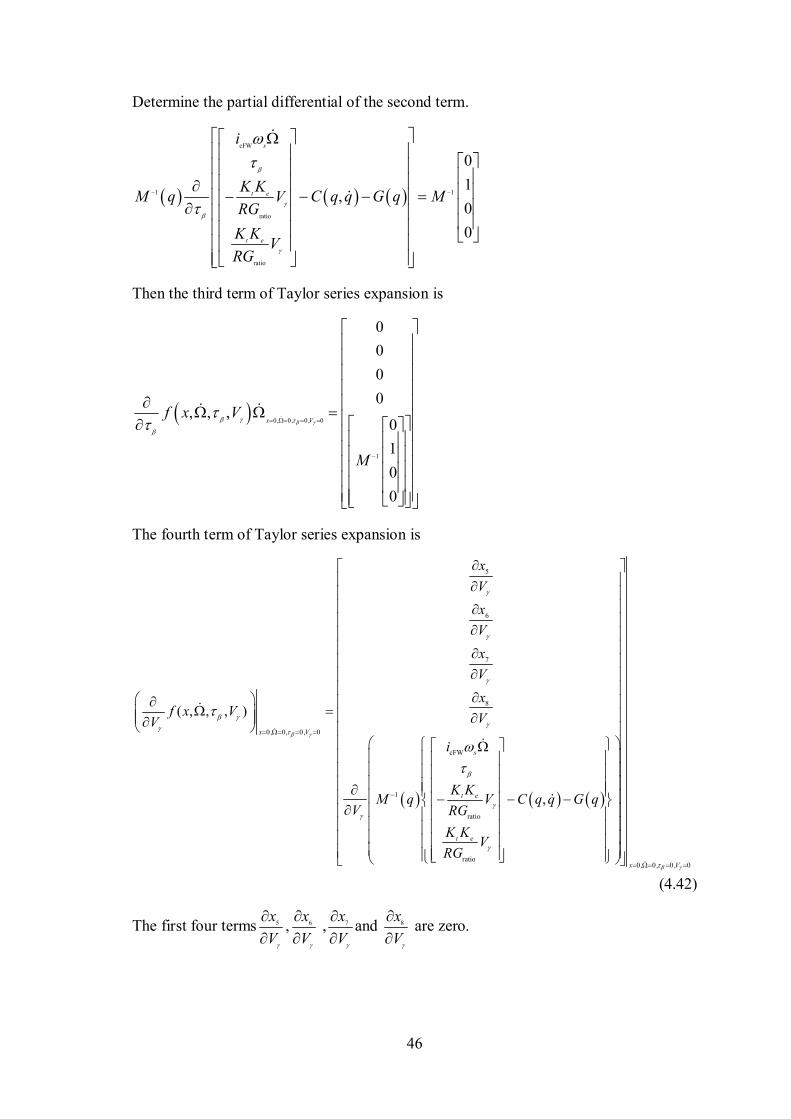
Determine the partial differential of the second term.
cFW
1 1
ratio
ratio
1
0
,0
0
s
t e
t e
i
K KM q C q q G q MV
RG
K KV
RG
Then the third term of Taylor series expansion is
0 00, ,
1
, 0
0
0
0
0, ,
0,
1
0
0
x Vf x V
M
The fourth term of Taylor series expansion is
5
6
7
8
0, , 0
cFW
1
r
0
atio
rat
0
io
,
( , , )
,
,
x V
s
t e
t e
x
V
x
V
x
V
xf x V
VV
i
K KM q C q q G qV
V RG
K KV
RG
0 0,0, , 0x V
(4.42)
The first four terms 5x
V
, 6
x
V
, 7
x
V
and 8
x
V
are zero.
47
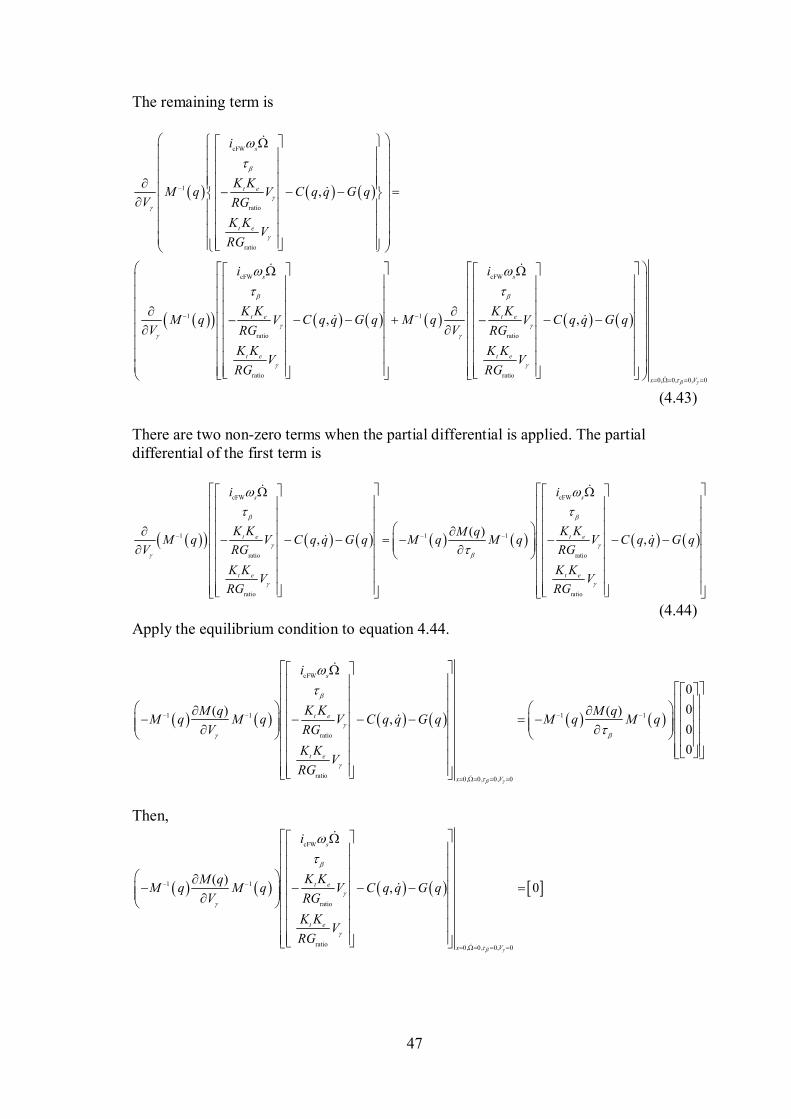
The remaining term is
cFW
1
ratio
ratio
cFW
1
ratio
ratio
,
,
s
t e
t e
s
t e
t e
i
K KM q C q q G qV
V RG
K KV
RG
i
K KM q C q q G qV
V RG
K KV
RG
cFW
1
ratio
ratio0, , 00 0,
,
s
t e
t e
x V
i
K KM q C q q G qV
V RG
K KV
RG
(4.43)
There are two non-zero terms when the partial differential is applied. The partial differential of the first term is
cFW cFW
1 1 1
ratio ratio
ratio ratio
( ) , ,
s s
t e t e
t e t e
i i
K K K KM qM q C q q G q M q M q C q q G qV V
V RG RG
K K K KV V
RG RG
(4.44) Apply the equilibrium condition to equation 4.44.
cFW
1 1 1 1
ratio
ratio0, 0 0, 0,
0
( ) ( )
0
0
0,
s
t e
t e
x V
i
K KM q M qM q M q C q q G q M q M qV
V RG
K KV
RG
Then,
cFW
1 1
ratio
ratio0, , 00 0,
( ) , 0
s
t e
t e
x V
i
K KM qM q M q C q q G qV
V RG
K KV
RG
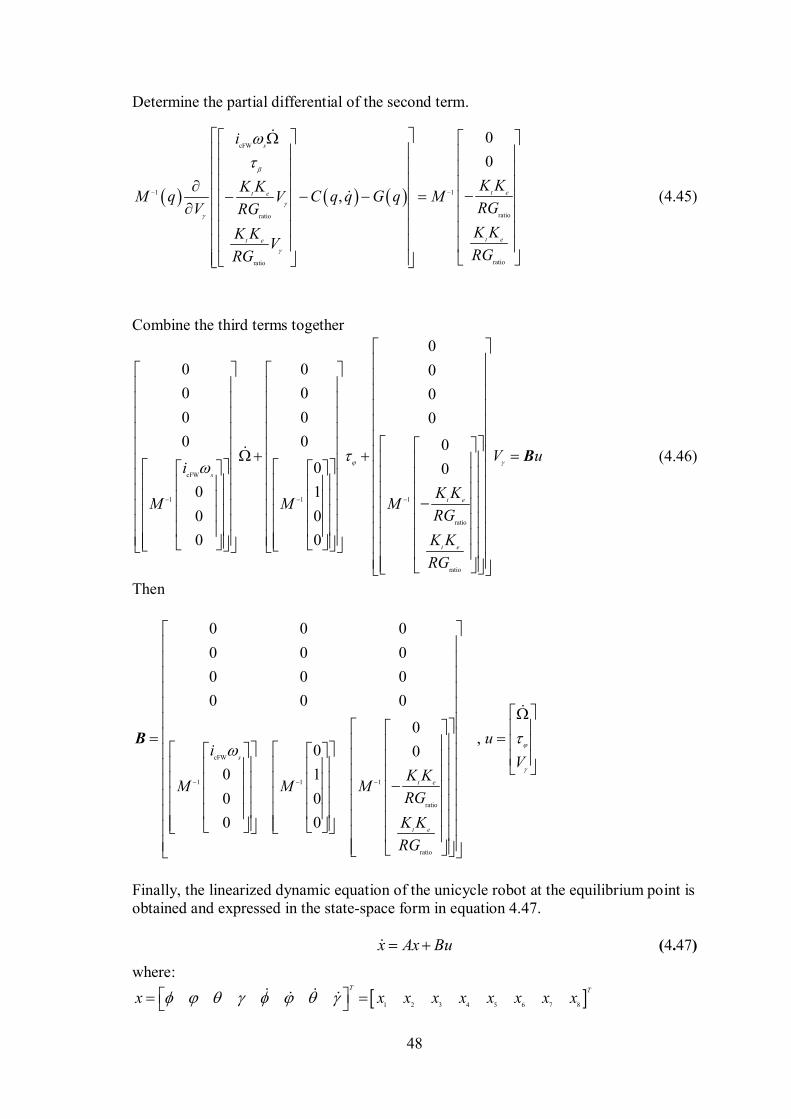
48
Determine the partial differential of the second term.
cFW
1 1
ratioratio
ratioratio
0
0
,
s
t et e
t et e
i
K KK KM q C q q G q MV
RGV RG
K KK KV
RGRG
(4.45)
Combine the third terms together
cFW
1 1 1
ratio
ratio
0
0 0 0
0 0 0
0 0 0
0 0
0
0
0
0
1
0 0
0 0
s
t e
t e
i
K KM M M
RG
K K
RG
V u
B (4.46)
Then
cFW
1 1 1
ratio
ratio
0 0 0
0 0 0
0 0 0
0 0 0
0 ,
0
1
0
0 0
0
0
0
s
t e
t e
ui
VK K
M M MRG
K K
RG
B
Finally, the linearized dynamic equation of the unicycle robot at the equilibrium point is obtained and expressed in the state-space form in equation 4.47. x Ax Bu (4.47)
where:
1 2 3 4 5 6 7 8
T T
x x x x x x x x x
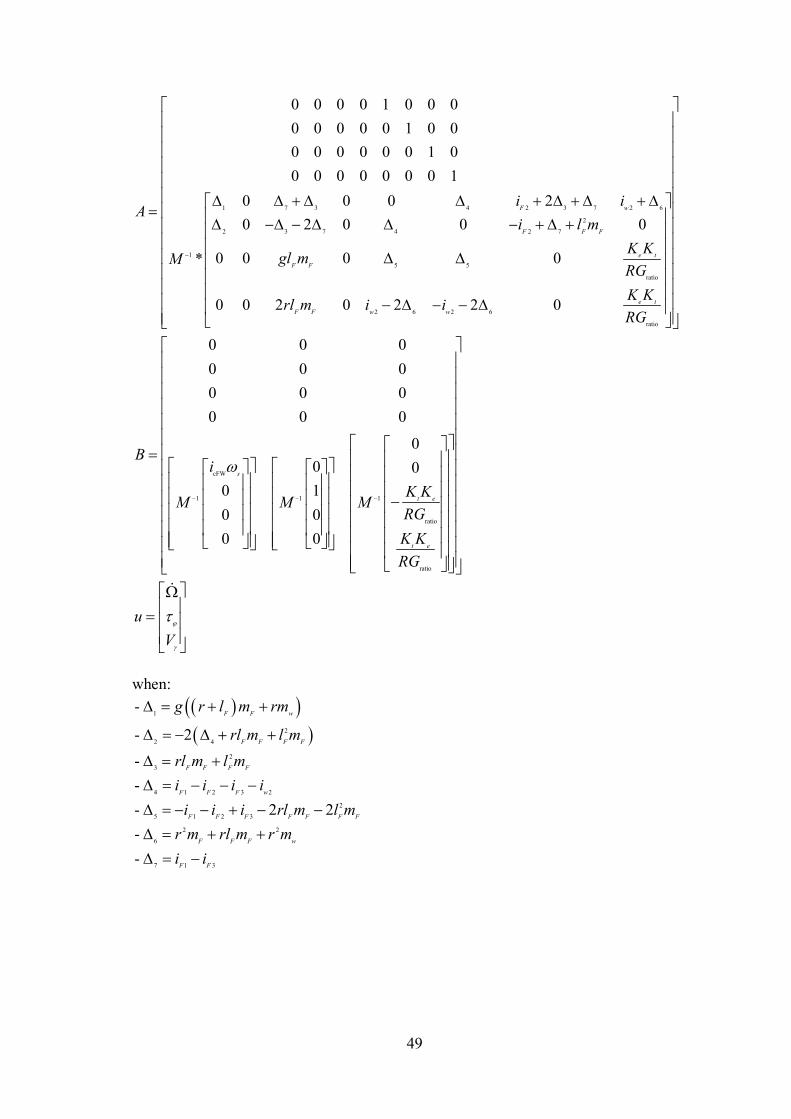
49
1 7 3 4 2 3 7 2 6
2
2 3 7 4 2 7
1
5 5
ratio
2 6 2 6
ratio
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
0 0 0 2
0 2 0 0 0
0 0 0 0*
0 0 2 0 2 2 0
F w
F F F
e t
F F
e t
F F w w
i iA
i l m
K Kgl mM
RG
K Krl m i i
RG
cFW
1 1 1
ratio
ratio
0 0 0
0 0 0
0 0 0
0 0 0
0
0
0 1
0 0
0 0
0s
t e
t e
Bi
K KM M M
RG
K K
RG
u
V
when:
1
2
2 4
2
3
4 1 2 3 2
2
5 1 2 3
2 2
6
7 1 3
-
- 2
-
-
- 2 2
-
-
F F w
F F F F
F F F F
F F F w
F F F F F F F
F F F w
F F
g r l m rm
rl m l m
rl m l m
i i i i
i i i rl m l m
r m rl m r m
i i
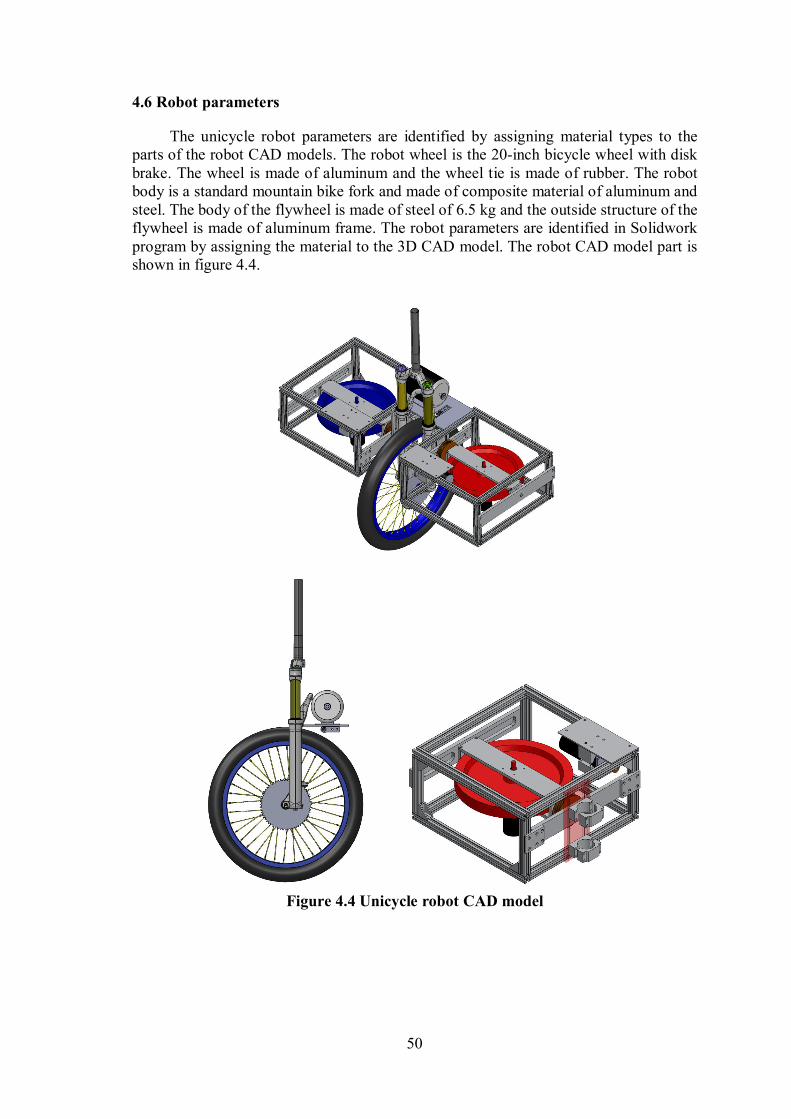
50
4.6 Robot parameters
The unicycle robot parameters are identified by assigning material types to the parts of the robot CAD models. The robot wheel is the 20-inch bicycle wheel with disk brake. The wheel is made of aluminum and the wheel tie is made of rubber. The robot body is a standard mountain bike fork and made of composite material of aluminum and steel. The body of the flywheel is made of steel of 6.5 kg and the outside structure of the flywheel is made of aluminum frame. The robot parameters are identified in Solidwork program by assigning the material to the 3D CAD model. The robot CAD model part is shown in figure 4.4.
Figure 4.4 Unicycle robot CAD model
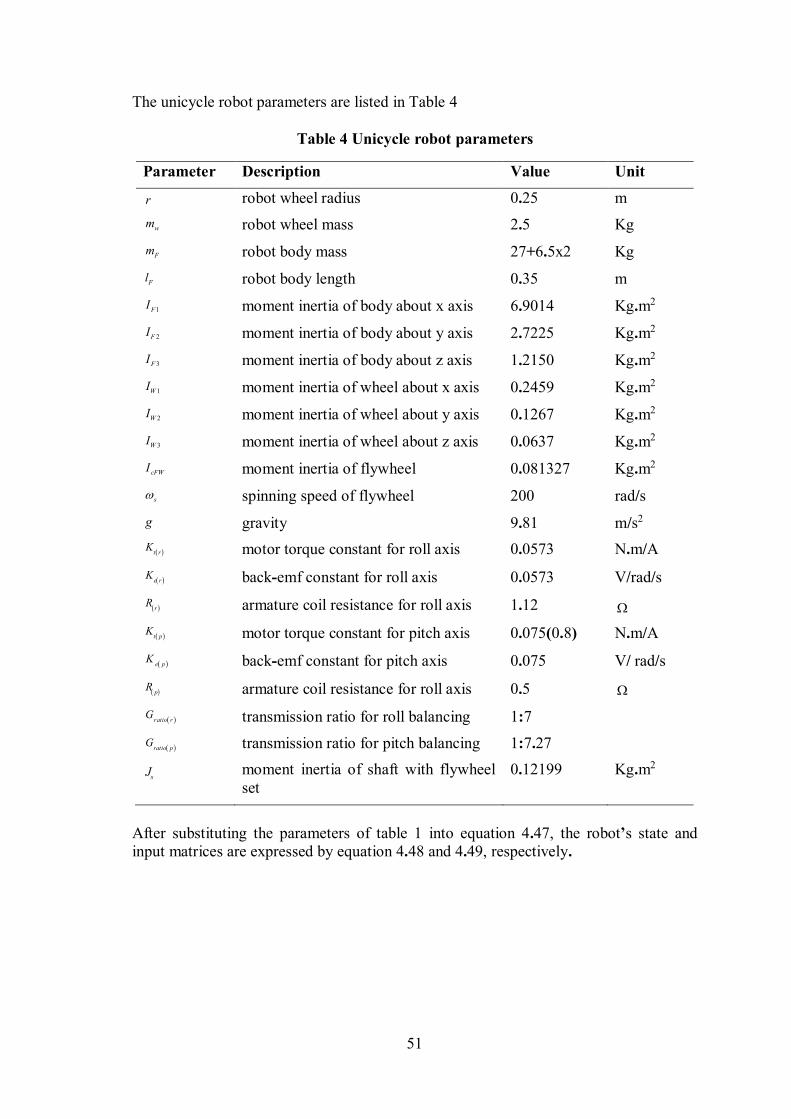
51
The unicycle robot parameters are listed in Table 4 Table 4 Unicycle robot parameters
Parameter Description Value Unit
r robot wheel radius 0.25 m
wm robot wheel mass 2.5 Kg
Fm robot body mass 27+6.5x2 Kg
Fl robot body length 0.35 m
1FI moment inertia of body about x axis 6.9014 Kg.m2
2FI moment inertia of body about y axis 2.7225 Kg.m2
3FI moment inertia of body about z axis 1.2150 Kg.m2
1WI moment inertia of wheel about x axis 0.2459 Kg.m2
2WI moment inertia of wheel about y axis 0.1267 Kg.m2
3WI moment inertia of wheel about z axis 0.0637 Kg.m2
cFWI moment inertia of flywheel 0.081327 Kg.m2
s spinning speed of flywheel 200 rad/s
g gravity 9.81 m/s2
t rK motor torque constant for roll axis 0.0573 N.m/A
e rK back-emf constant for roll axis 0.0573 V/rad/s
rR armature coil resistance for roll axis 1.12
t pK motor torque constant for pitch axis 0.075(0.8) N.m/A
e pK back-emf constant for pitch axis 0.075 V/ rad/s
pR armature coil resistance for roll axis 0.5
ratio rG
ratio pG
sJ
transmission ratio for roll balancing
transmission ratio for pitch balancing
moment inertia of shaft with flywheel set
1:7
1:7.27
0.12199
Kg.m2
After substituting the parameters of table 1 into equation 4.47, the robot’s state and input matrices are expressed by equation 4.48 and 4.49, respectively.

52
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
11.3087 0 0.6490 0 0 0.1307 1.1615 0.5081
30.1869 0 15.4632 0 2.2188 0 6.1499 0
0 0 39.9081 0 0.6358 0.7348 0 0.005
0 0 47.6739 0 8.8029 8.8029 0 0.0290
A
(4.48)
0 0 0
0 0 0
0 0 0
0 0 0
0.5621 0 0
0 0.7820 0
0 0 0.0442
0 0 0.0782
B
(4.49)
8C eye (4.50)
Then, the linearized model in state-space form becomes.
0 0 0 0 1 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 1
11.3087 0 0.6490 0 0 0.1307 1.1615 0.5081
30.1869 0 15.4632 0 2.2188 0 6.1499 0
0 0 39.9081 0 0.6358 0.7348 0 0.005
0 0 47.6739 0 8.8029 8.8029 0 0.0
290
xx
0 0 0
0.5621 0 0
0 0.7820 0
0 0 0.0442
0 0 0.0782
u
After the unicycle robot model is obtained, the state variables of the unicycle robot are checked. The observability and controllability matrices are full rank then the unicycle robot dynamic model is fully observable and controllable.
2
1n
C
CA
Observability CA
CA
and 2 1nControllability B AB A B A B
(4.51)
However, after considering the poles of the characteristic equation of the unicycle robot system, there are eight poles in the unicycle robot system:
[0.000, 0.000, -6.787, -4.083, 6.552, 0.3498+2.683i, 0.3498-2.683i, 3.6475],
Some poles locate on the right-hand side of the s-plane. The result shows that the unicycle robot is an unstable system.
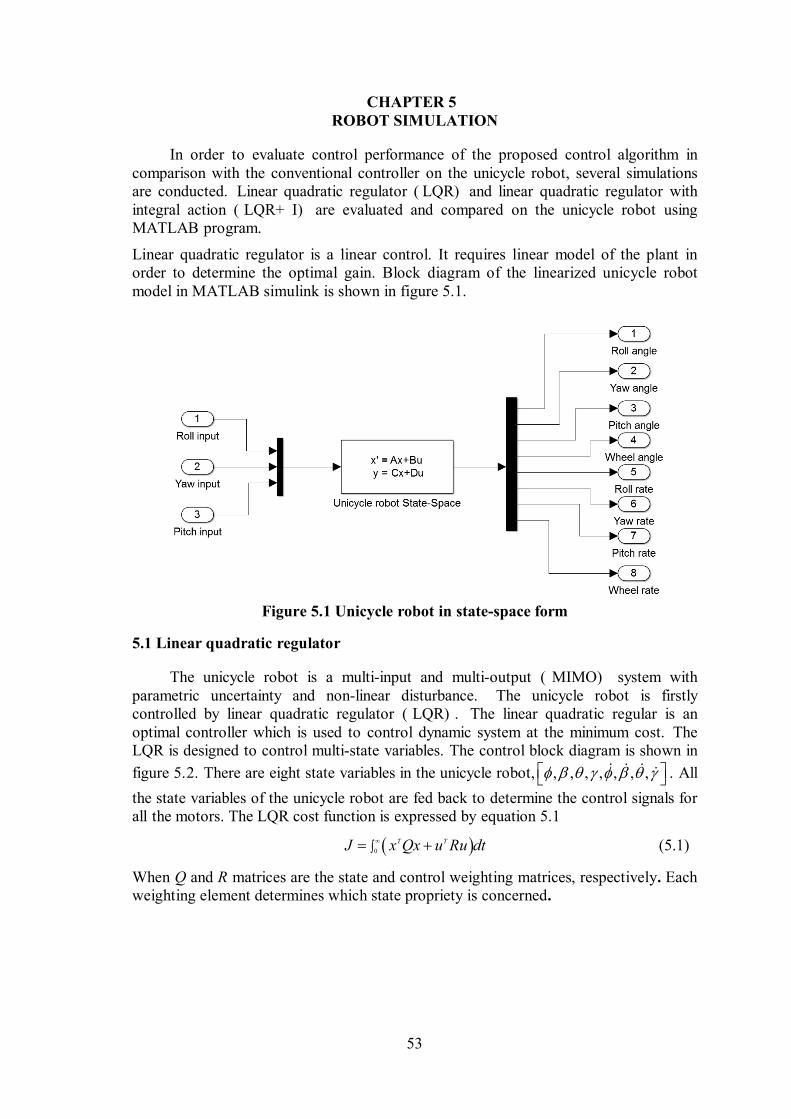
53
CHAPTER 5 ROBOT SIMULATION
In order to evaluate control performance of the proposed control algorithm in comparison with the conventional controller on the unicycle robot, several simulations are conducted. Linear quadratic regulator ( LQR) and linear quadratic regulator with integral action ( LQR+ I) are evaluated and compared on the unicycle robot using MATLAB program.
Linear quadratic regulator is a linear control. It requires linear model of the plant in order to determine the optimal gain. Block diagram of the linearized unicycle robot model in MATLAB simulink is shown in figure 5.1.
Figure 5.1 Unicycle robot in state-space form
5.1 Linear quadratic regulator
The unicycle robot is a multi-input and multi-output ( MIMO) system with parametric uncertainty and non-linear disturbance. The unicycle robot is firstly controlled by linear quadratic regulator ( LQR) . The linear quadratic regular is an optimal controller which is used to control dynamic system at the minimum cost. The LQR is designed to control multi-state variables. The control block diagram is shown in
figure 5.2. There are eight state variables in the unicycle robot, , , , , , , , . All
the state variables of the unicycle robot are fed back to determine the control signals for all the motors. The LQR cost function is expressed by equation 5.1
0
T TJ x Qx u Ru dt
(5.1)
When Q and R matrices are the state and control weighting matrices, respectively. Each weighting element determines which state propriety is concerned.
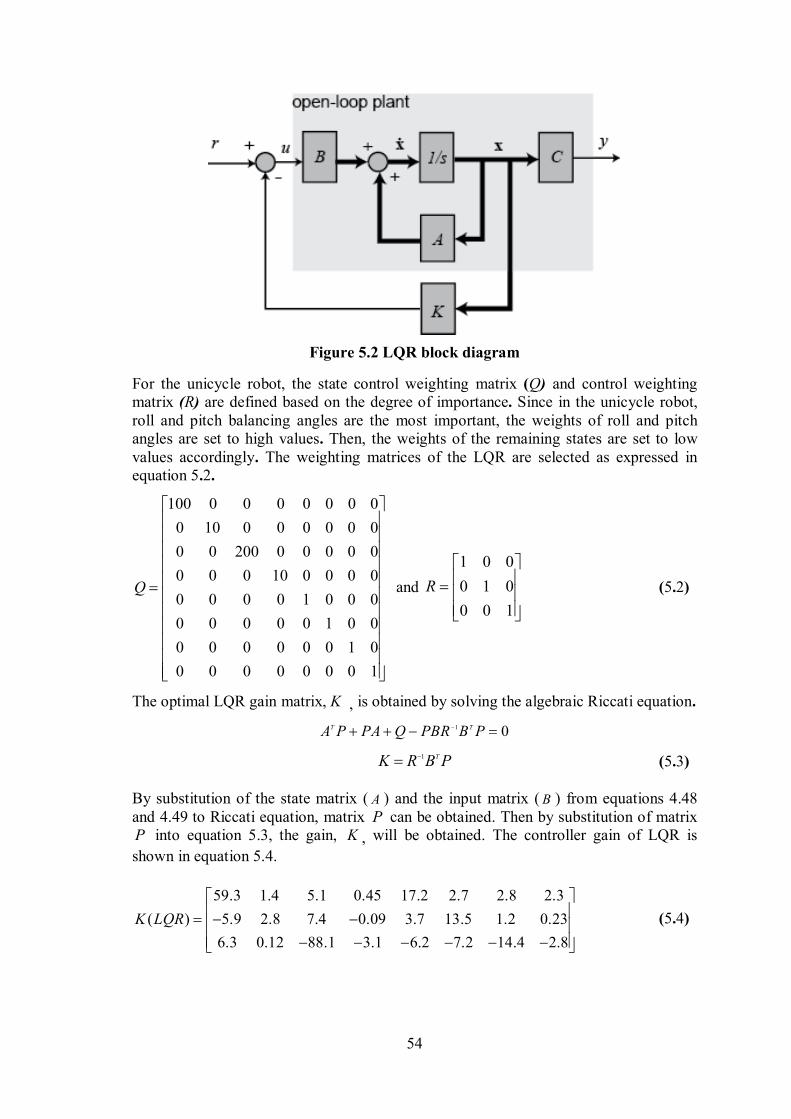
54
Figure 5.2 LQR block diagram
For the unicycle robot, the state control weighting matrix (Q) and control weighting matrix (R) are defined based on the degree of importance. Since in the unicycle robot, roll and pitch balancing angles are the most important, the weights of roll and pitch angles are set to high values. Then, the weights of the remaining states are set to low values accordingly. The weighting matrices of the LQR are selected as expressed in equation 5.2.
100 0 0 0 0 0 0 0
0 10 0 0 0 0 0 0
0 0 200 0 0 0 0 0
0 0 0 10 0 0 0 0
0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0
0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 1
Q
and
1 0 0
0 1 0
0 0 1
R
(5.2)
The optimal LQR gain matrix, K , is obtained by solving the algebraic Riccati equation.
1 0T TA P PA Q PBR B P
1 TK R B P (5.3)
By substitution of the state matrix ( A ) and the input matrix ( B ) from equations 4.48 and 4.49 to Riccati equation, matrix P can be obtained. Then by substitution of matrix P into equation 5.3, the gain, K , will be obtained. The controller gain of LQR is
shown in equation 5.4.
59.3 1.4 5.1 0.45 17.2 2.7 2.8 2.3
( ) 5.9 2.8 7.4 0.09 3.7 13.5 1.2 0.23
6.3 0.12 88.1 3.1 6.2 7.2 14.4 2.8
K LQR
(5.4)
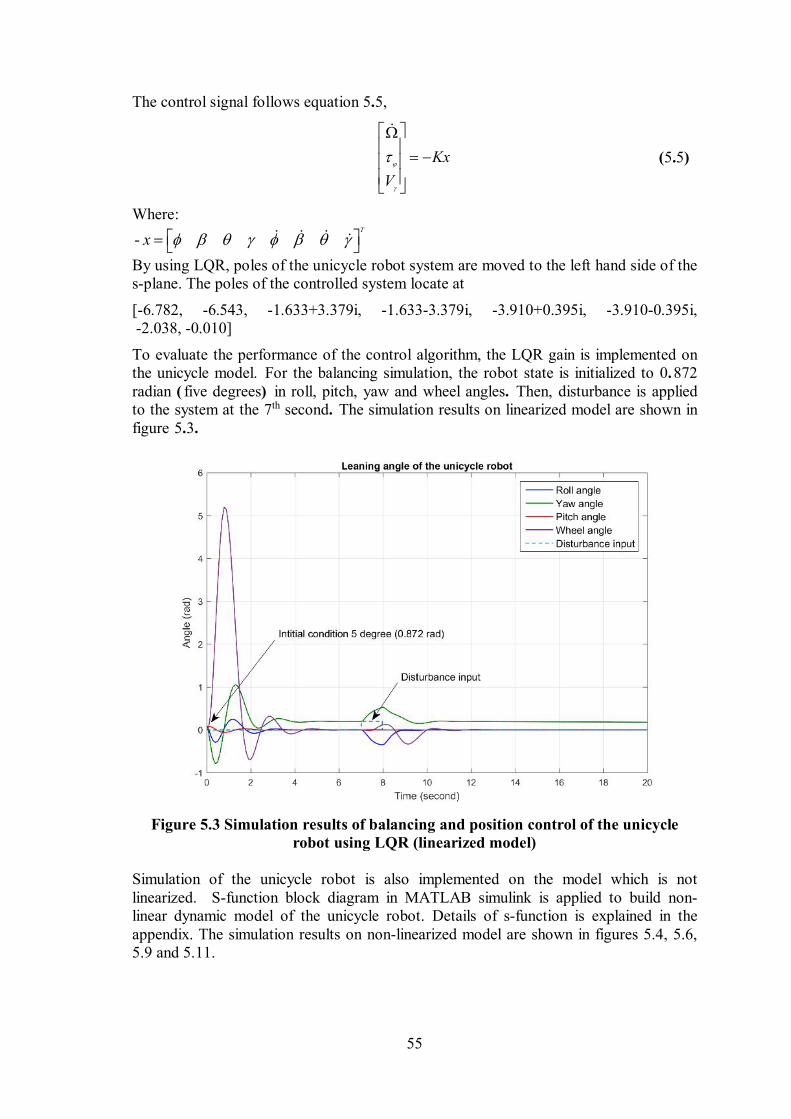
55
The control signal follows equation 5.5,
Kx
V
(5.5)
Where:
- T
x
By using LQR, poles of the unicycle robot system are moved to the left hand side of the s-plane. The poles of the controlled system locate at
[-6.782, -6.543, -1.633+3.379i, -1.633-3.379i, -3.910+0.395i, -3.910-0.395i, -2.038, -0.010]
To evaluate the performance of the control algorithm, the LQR gain is implemented on the unicycle model. For the balancing simulation, the robot state is initialized to 0.872 radian ( five degrees) in roll, pitch, yaw and wheel angles. Then, disturbance is applied to the system at the 7th second. The simulation results on linearized model are shown in figure 5.3.
Figure 5.3 Simulation results of balancing and position control of the unicycle robot using LQR (linearized model)
Simulation of the unicycle robot is also implemented on the model which is not linearized. S-function block diagram in MATLAB simulink is applied to build non-linear dynamic model of the unicycle robot. Details of s-function is explained in the appendix. The simulation results on non-linearized model are shown in figures 5.4, 5.6, 5.9 and 5.11.
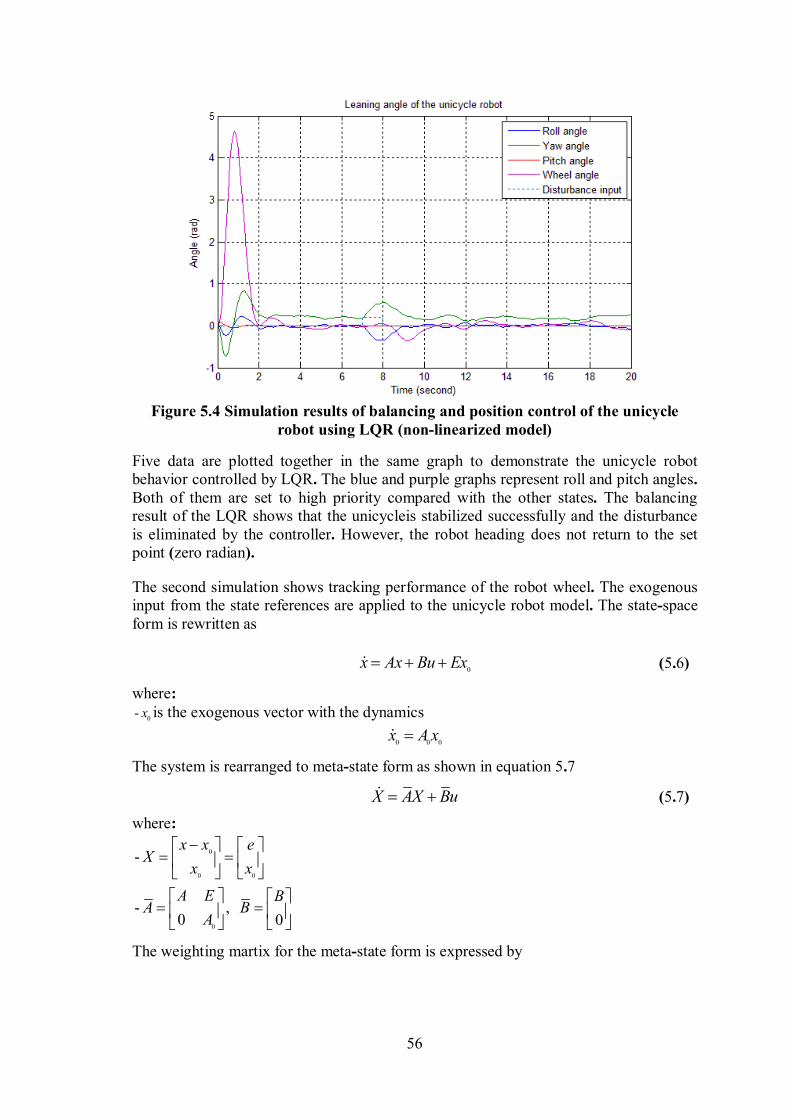
56
Figure 5.4 Simulation results of balancing and position control of the unicycle
robot using LQR (non-linearized model)
Five data are plotted together in the same graph to demonstrate the unicycle robot behavior controlled by LQR. The blue and purple graphs represent roll and pitch angles. Both of them are set to high priority compared with the other states. The balancing result of the LQR shows that the unicycleis stabilized successfully and the disturbance is eliminated by the controller. However, the robot heading does not return to the set point (zero radian).
The second simulation shows tracking performance of the robot wheel. The exogenous input from the state references are applied to the unicycle robot model. The state-space form is rewritten as
0
x Ax Bu Ex (5.6)
where:
0- x is the exogenous vector with the dynamics
0 0 0x A x
The system is rearranged to meta-state form as shown in equation 5.7
X AX Bu (5.7)
where:
0
0 0
0
-
- , 0 0
x x eX
x x
A E BA B
A
The weighting martix for the meta-state form is expressed by
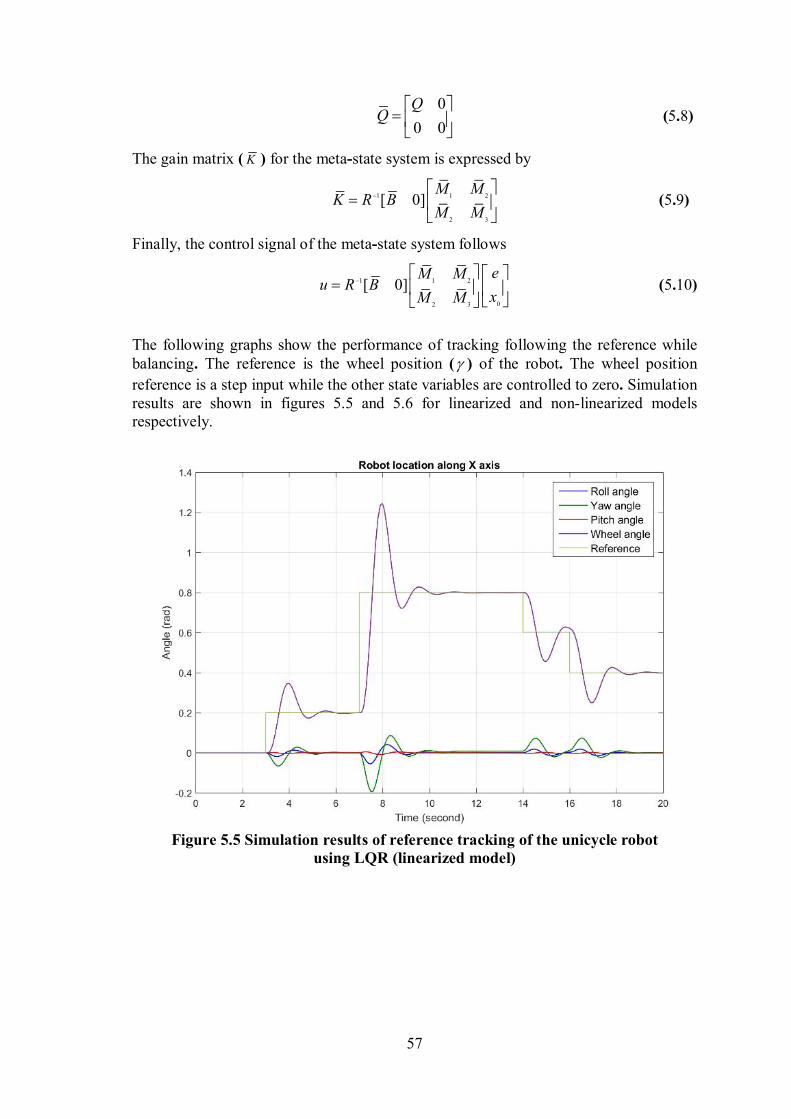
57
0
0 0
(5.8)
The gain matrix ( K ) for the meta-state system is expressed by
1 1 2
2 3
[ 0]M M
K R BM M
(5.9)
Finally, the control signal of the meta-state system follows
1 1 2
02 3
[ 0]eM M
u R BxM M
(5.10)
The following graphs show the performance of tracking following the reference while balancing. The reference is the wheel position ( ) of the robot. The wheel position
reference is a step input while the other state variables are controlled to zero. Simulation results are shown in figures 5.5 and 5.6 for linearized and non-linearized models respectively.
Figure 5.5 Simulation results of reference tracking of the unicycle robot
using LQR (linearized model)
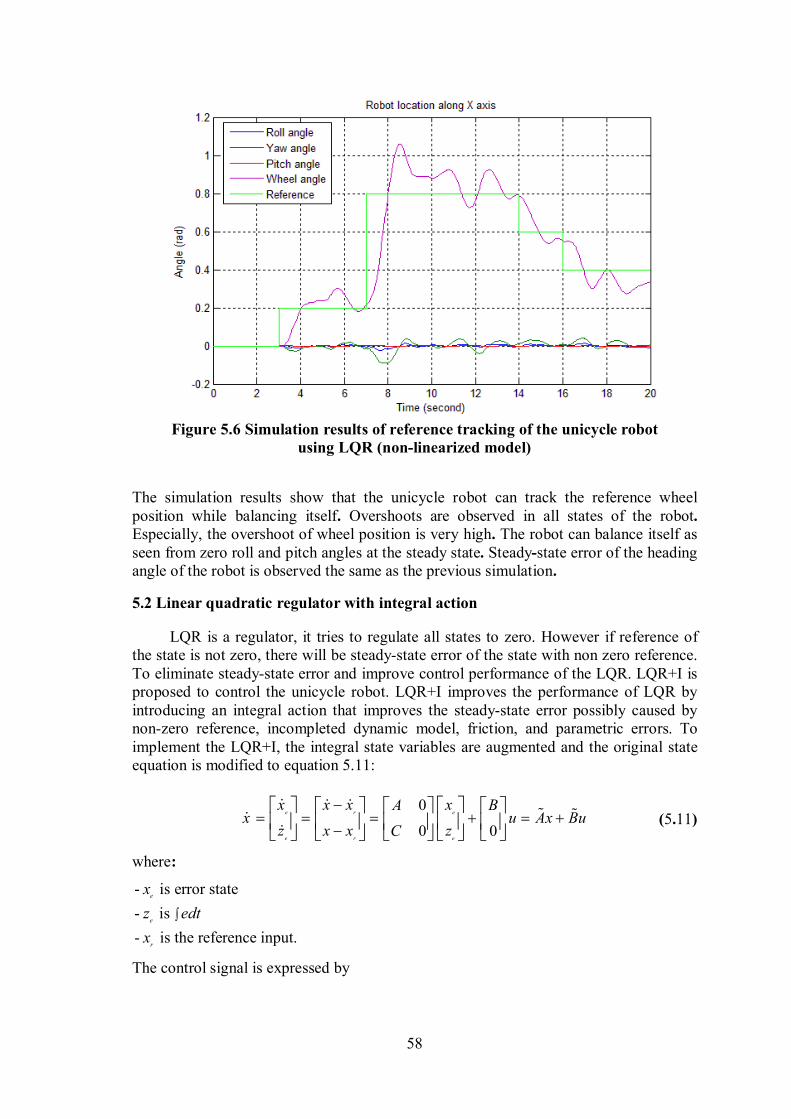
58
Figure 5.6 Simulation results of reference tracking of the unicycle robot
using LQR (non-linearized model)
The simulation results show that the unicycle robot can track the reference wheel position while balancing itself. Overshoots are observed in all states of the robot. Especially, the overshoot of wheel position is very high. The robot can balance itself as seen from zero roll and pitch angles at the steady state. Steady-state error of the heading angle of the robot is observed the same as the previous simulation.
5.2 Linear quadratic regulator with integral action
LQR is a regulator, it tries to regulate all states to zero. However if reference of the state is not zero, there will be steady-state error of the state with non zero reference. To eliminate steady-state error and improve control performance of the LQR. LQR+I is proposed to control the unicycle robot. LQR+I improves the performance of LQR by introducing an integral action that improves the steady-state error possibly caused by non-zero reference, incompleted dynamic model, friction, and parametric errors. To implement the LQR+I, the integral state variables are augmented and the original state equation is modified to equation 5.11:
0
0 0
e er
e er
x xx x A Bx u Ax Bu
z zx x C
(5.11)
where:
- is error state
- is
- is the reference input.
e
e
r
x
z edt
x
The control signal is expressed by
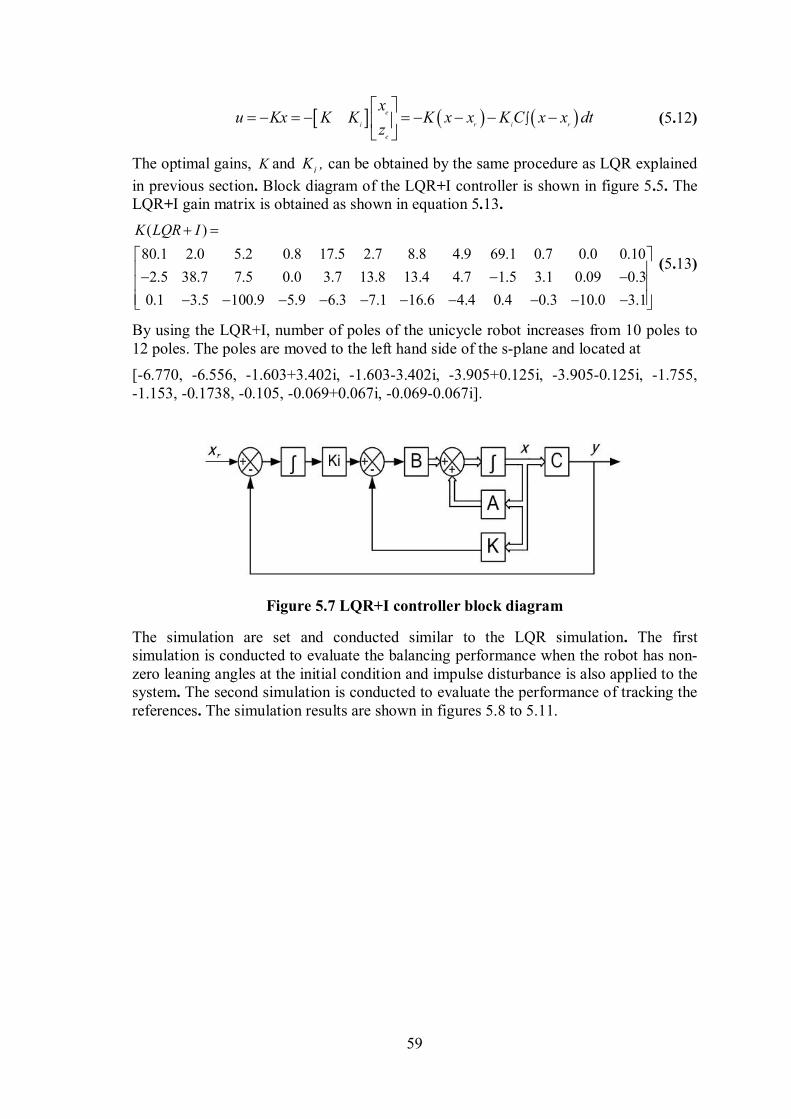
59
e
i r i r
e
xu Kx K K K x x K C x x dt
z
(5.12)
The optimal gains, K and iK , can be obtained by the same procedure as LQR explained
in previous section. Block diagram of the LQR+I controller is shown in figure 5.5. The LQR+I gain matrix is obtained as shown in equation 5.13.
( )
80.1 2.0 5.2 0.8 17.5 2.7 8.8 4.9 69.1 0.7 0.0 0.10
2.5 38.7 7.5 0.0 3.7 13.8 13.4 4.7 1.5 3.1 0.09 0.3
0.1 3.5 100.9 5.9 6.3 7.1 16.6 4.4 0.4 0.3 10.0 3.1
K LQR I
(5.13)
By using the LQR+I, number of poles of the unicycle robot increases from 10 poles to 12 poles. The poles are moved to the left hand side of the s-plane and located at
[-6.770, -6.556, -1.603+3.402i, -1.603-3.402i, -3.905+0.125i, -3.905-0.125i, -1.755, -1.153, -0.1738, -0.105, -0.069+0.067i, -0.069-0.067i].
Figure 5.7 LQR+I controller block diagram
The simulation are set and conducted similar to the LQR simulation. The first simulation is conducted to evaluate the balancing performance when the robot has non-zero leaning angles at the initial condition and impulse disturbance is also applied to the system. The second simulation is conducted to evaluate the performance of tracking the references. The simulation results are shown in figures 5.8 to 5.11.
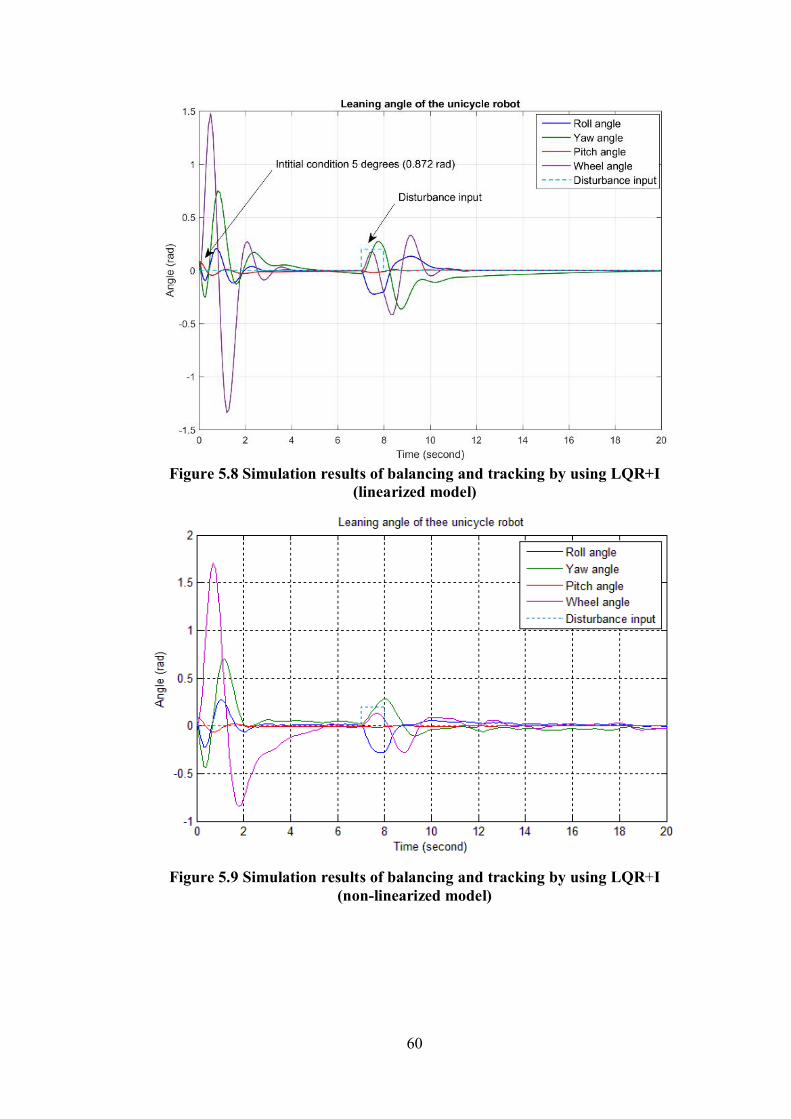
60
Figure 5.8 Simulation results of balancing and tracking by using LQR+I
(linearized model)
Figure 5.9 Simulation results of balancing and tracking by using LQR+I (non-linearized model)
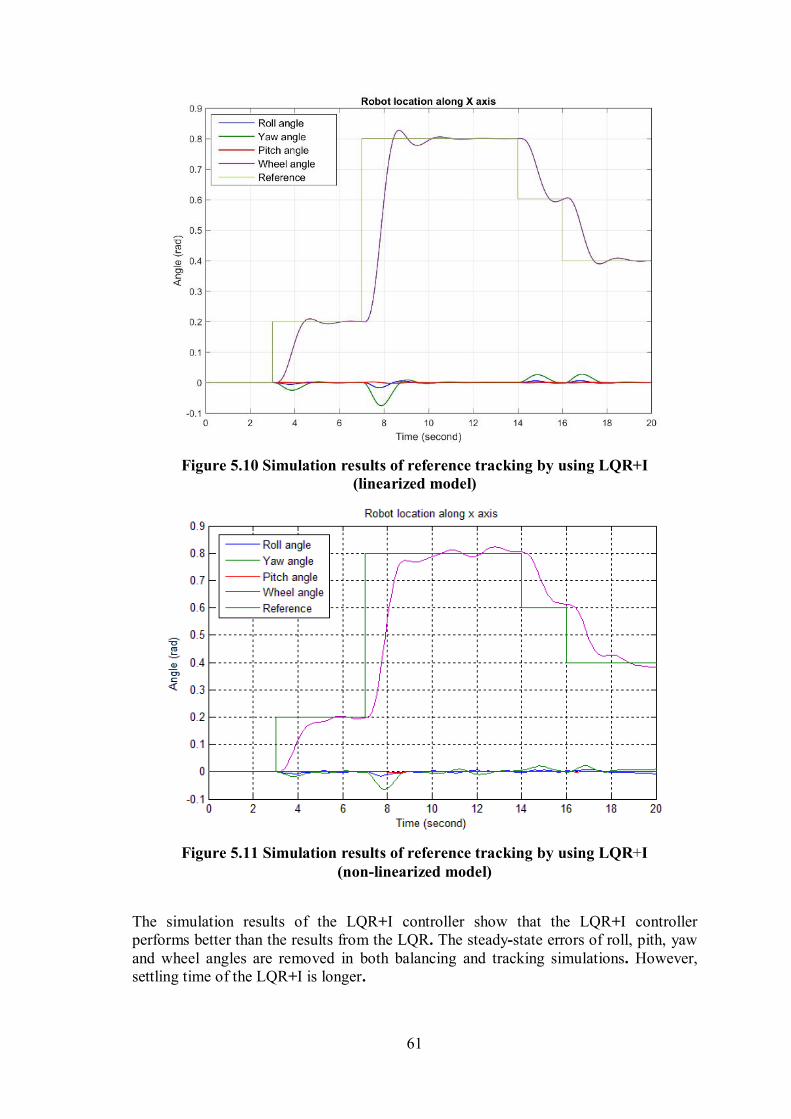
61
Figure 5.10 Simulation results of reference tracking by using LQR+I (linearized model)
Figure 5.11 Simulation results of reference tracking by using LQR+I (non-linearized model)
The simulation results of the LQR+I controller show that the LQR+I controller performs better than the results from the LQR. The steady-state errors of roll, pith, yaw and wheel angles are removed in both balancing and tracking simulations. However, settling time of the LQR+I is longer.
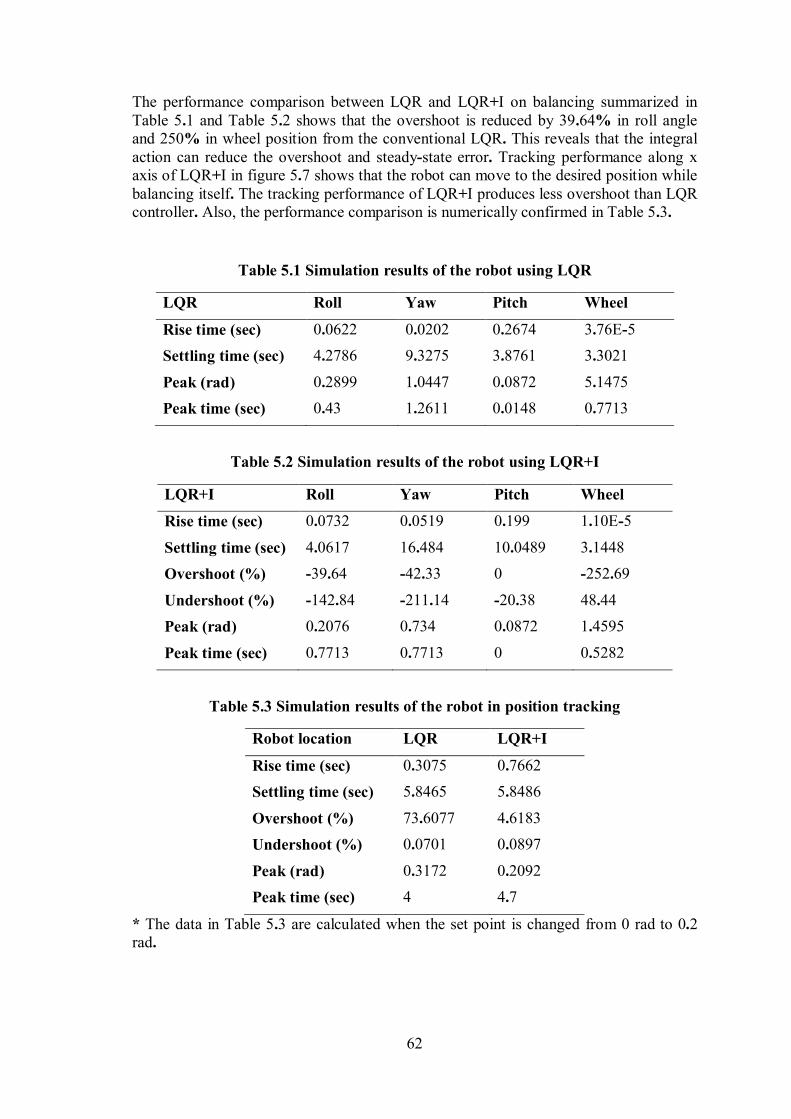
62
The performance comparison between LQR and LQR+I on balancing summarized in Table 5.1 and Table 5.2 shows that the overshoot is reduced by 39.64% in roll angle and 250% in wheel position from the conventional LQR. This reveals that the integral action can reduce the overshoot and steady-state error. Tracking performance along x axis of LQR+I in figure 5.7 shows that the robot can move to the desired position while balancing itself. The tracking performance of LQR+I produces less overshoot than LQR controller. Also, the performance comparison is numerically confirmed in Table 5.3.
Table 5.1 Simulation results of the robot using LQR
LQR Roll Yaw Pitch Wheel
Rise time (sec) 0.0622 0.0202 0.2674 3.76E-5
Settling time (sec) 4.2786 9.3275 3.8761 3.3021
Peak (rad) 0.2899 1.0447 0.0872 5.1475
Peak time (sec) 0.43 1.2611 0.0148 0.7713
Table 5.2 Simulation results of the robot using LQR+I
LQR+I Roll Yaw Pitch Wheel
Rise time (sec) 0.0732 0.0519 0.199 1.10E-5
Settling time (sec) 4.0617 16.484 10.0489 3.1448
Overshoot (%) -39.64 -42.33 0 -252.69
Undershoot (%) -142.84 -211.14 -20.38 48.44
Peak (rad) 0.2076 0.734 0.0872 1.4595
Peak time (sec) 0.7713 0.7713 0 0.5282
Table 5.3 Simulation results of the robot in position tracking
Robot location LQR LQR+I
Rise time (sec) 0.3075 0.7662
Settling time (sec) 5.8465 5.8486
Overshoot (%) 73.6077 4.6183
Undershoot (%) 0.0701 0.0897
Peak (rad) 0.3172 0.2092
Peak time (sec) 4 4.7
* The data in Table 5.3 are calculated when the set point is changed from 0 rad to 0.2 rad.
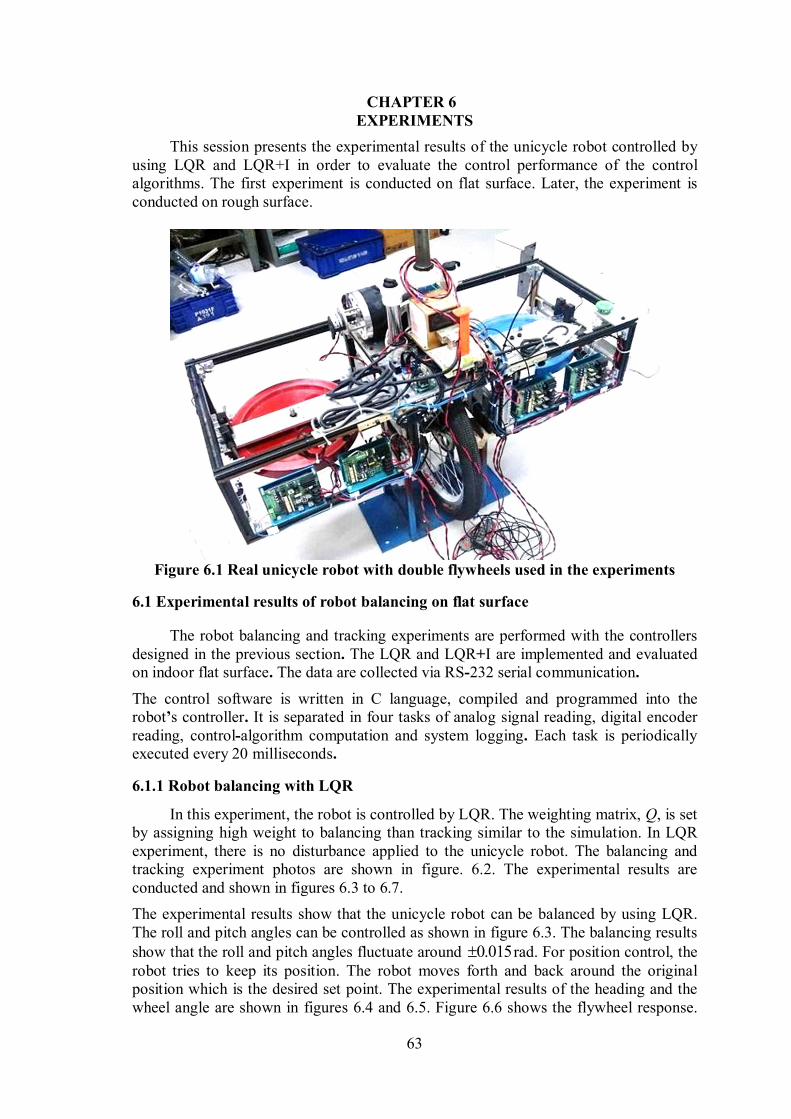
63
CHAPTER 6 EXPERIMENTS
This session presents the experimental results of the unicycle robot controlled by using LQR and LQR+I in order to evaluate the control performance of the control algorithms. The first experiment is conducted on flat surface. Later, the experiment is conducted on rough surface.
Figure 6.1 Real unicycle robot with double flywheels used in the experiments
6.1 Experimental results of robot balancing on flat surface
The robot balancing and tracking experiments are performed with the controllers designed in the previous section. The LQR and LQR+I are implemented and evaluated on indoor flat surface. The data are collected via RS-232 serial communication.
The control software is written in C language, compiled and programmed into the robot’s controller. It is separated in four tasks of analog signal reading, digital encoder reading, control-algorithm computation and system logging. Each task is periodically executed every 20 milliseconds.
6.1.1 Robot balancing with LQR
In this experiment, the robot is controlled by LQR. The weighting matrix, Q, is set by assigning high weight to balancing than tracking similar to the simulation. In LQR experiment, there is no disturbance applied to the unicycle robot. The balancing and tracking experiment photos are shown in figure. 6.2. The experimental results are conducted and shown in figures 6.3 to 6.7.
The experimental results show that the unicycle robot can be balanced by using LQR. The roll and pitch angles can be controlled as shown in figure 6.3. The balancing results show that the roll and pitch angles fluctuate around 0.015 rad. For position control, the robot tries to keep its position. The robot moves forth and back around the original position which is the desired set point. The experimental results of the heading and the wheel angle are shown in figures 6.4 and 6.5. Figure 6.6 shows the flywheel response.

64
Both flywheels are controlled to have the rotating speed of 200 rad/s in opposite directions.
Figure 6.2 Photos from the experiment ( https://www.youtube.com/watch?v=t6npxU_x1Ng )
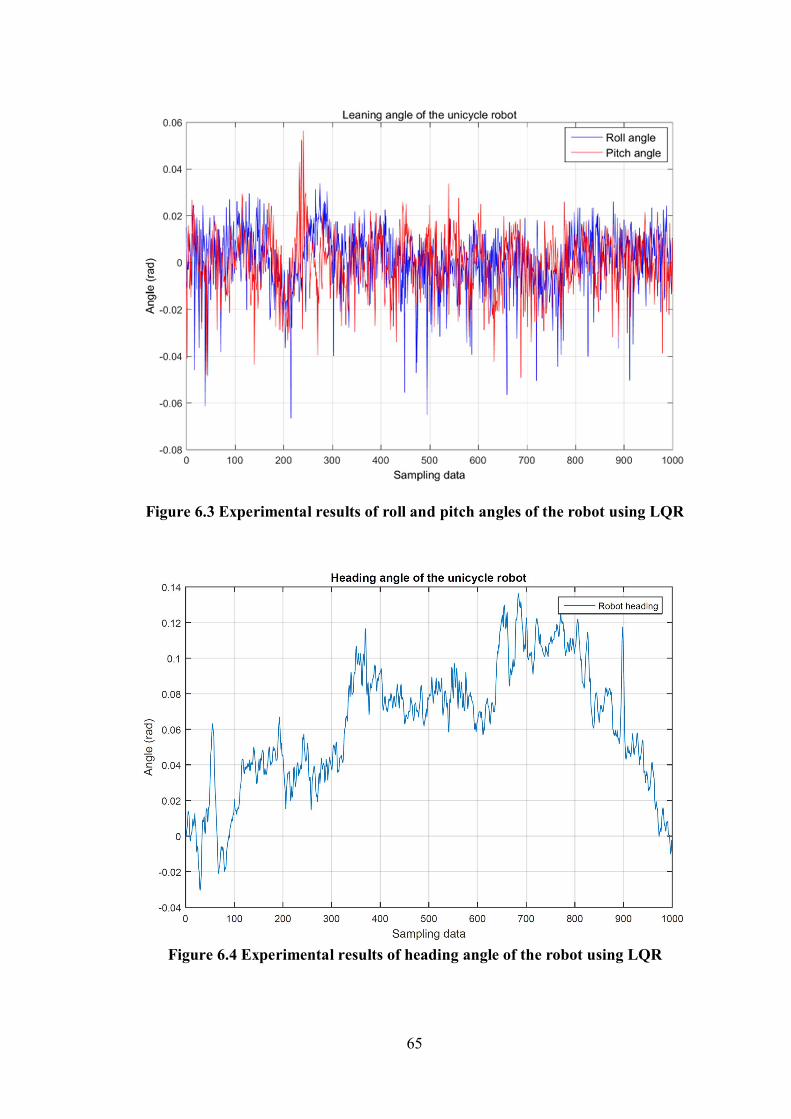
65
Figure 6.3 Experimental results of roll and pitch angles of the robot using LQR
Figure 6.4 Experimental results of heading angle of the robot using LQR
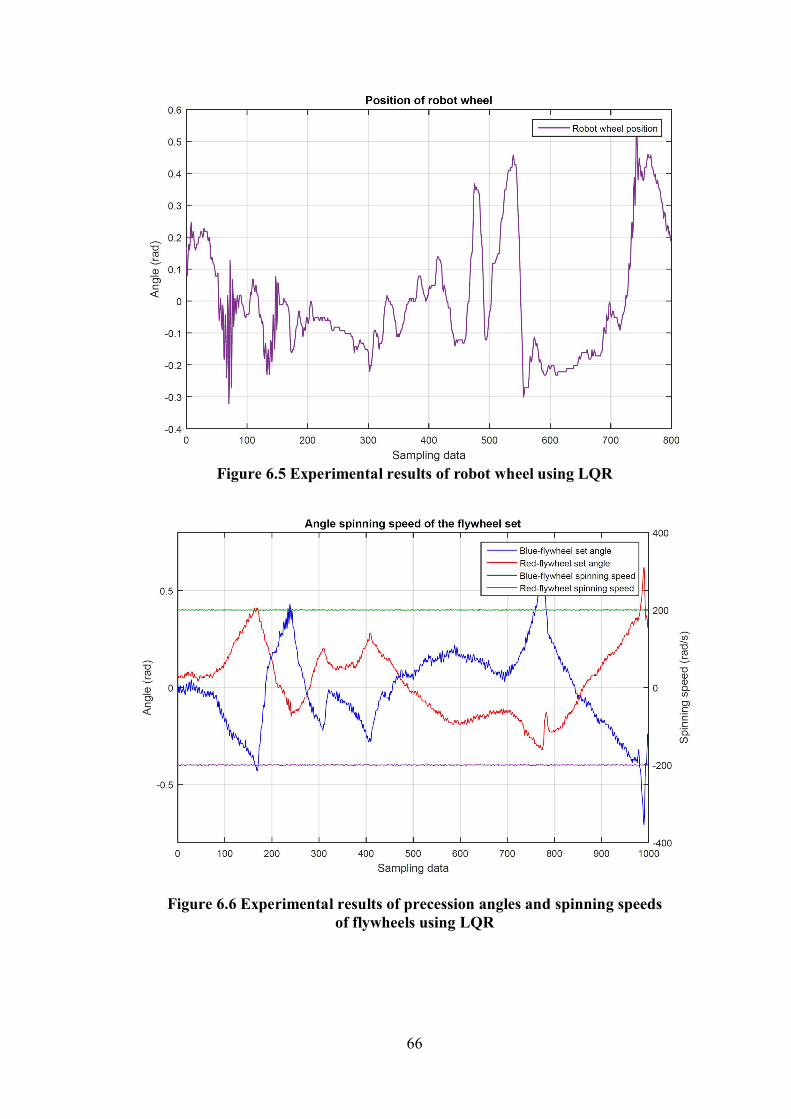
66
Figure 6.5 Experimental results of robot wheel using LQR
Figure 6.6 Experimental results of precession angles and spinning speeds of flywheels using LQR
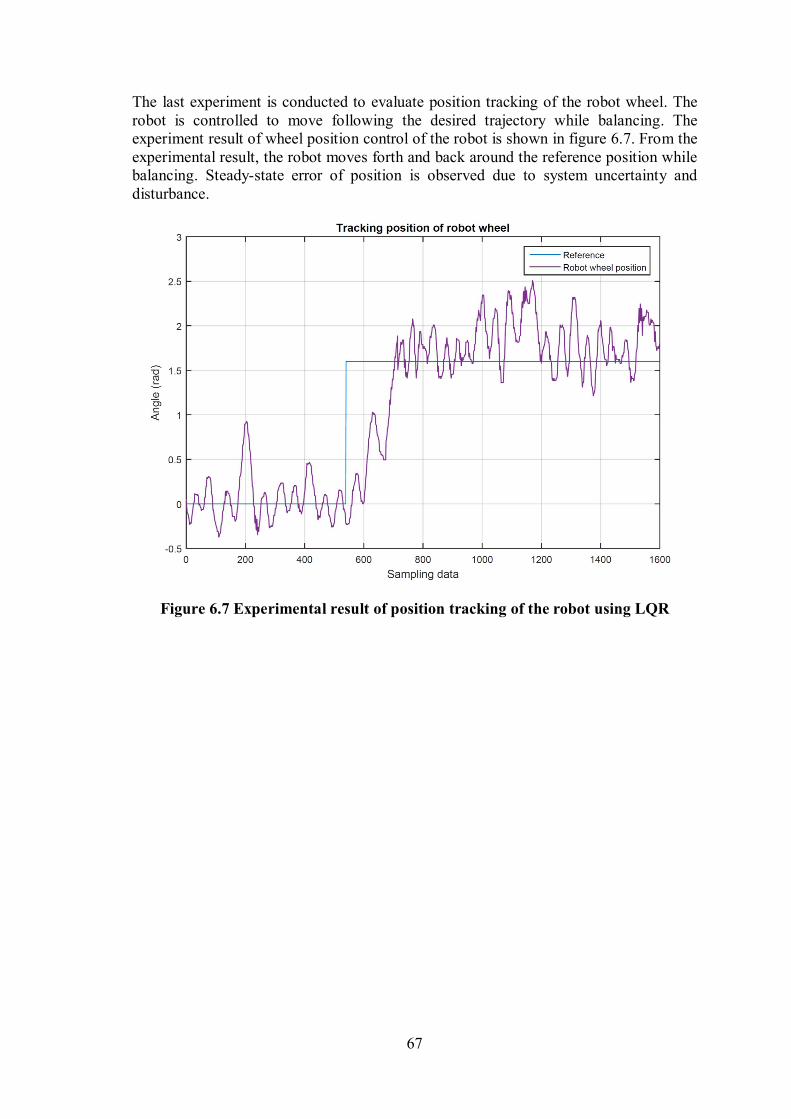
67
The last experiment is conducted to evaluate position tracking of the robot wheel. The robot is controlled to move following the desired trajectory while balancing. The experiment result of wheel position control of the robot is shown in figure 6.7. From the experimental result, the robot moves forth and back around the reference position while balancing. Steady-state error of position is observed due to system uncertainty and disturbance.
Figure 6.7 Experimental result of position tracking of the robot using LQR
68
6.1.2 Robot balancing with LQR+I controller
The LQR with integral action is implemented on the real unicycle robot. The state-weighting matrix, Q, is set by assigning high weight to the balancing states and error integration states than the tracking state because the high priority is always the balancing. To evaluate the performance of the LQR+I controller, a disturbance is applied to the robot along lateral direction as an impulse force using a rubber hammer as shown in figure 6.8. The experimental results show that LQR+I controller can robustly stabilize the unicycle robot in roll, pitch and yaw angles, as shown in figures 6.9 and 6.10. The wheel position under the disturbance is shown in figures 6.11 and the precession angles of both flywheels are presented in figure 6.12. The last experiment of the LQR+I is conducted on the trajectory tracking of the robot wheel position as shown in figure 6.13.
Figure 6.8 Photos from the experiment with disturbance using LQR+I
( https://www.youtube.com/watch?v=xbi-eQX_c_U )
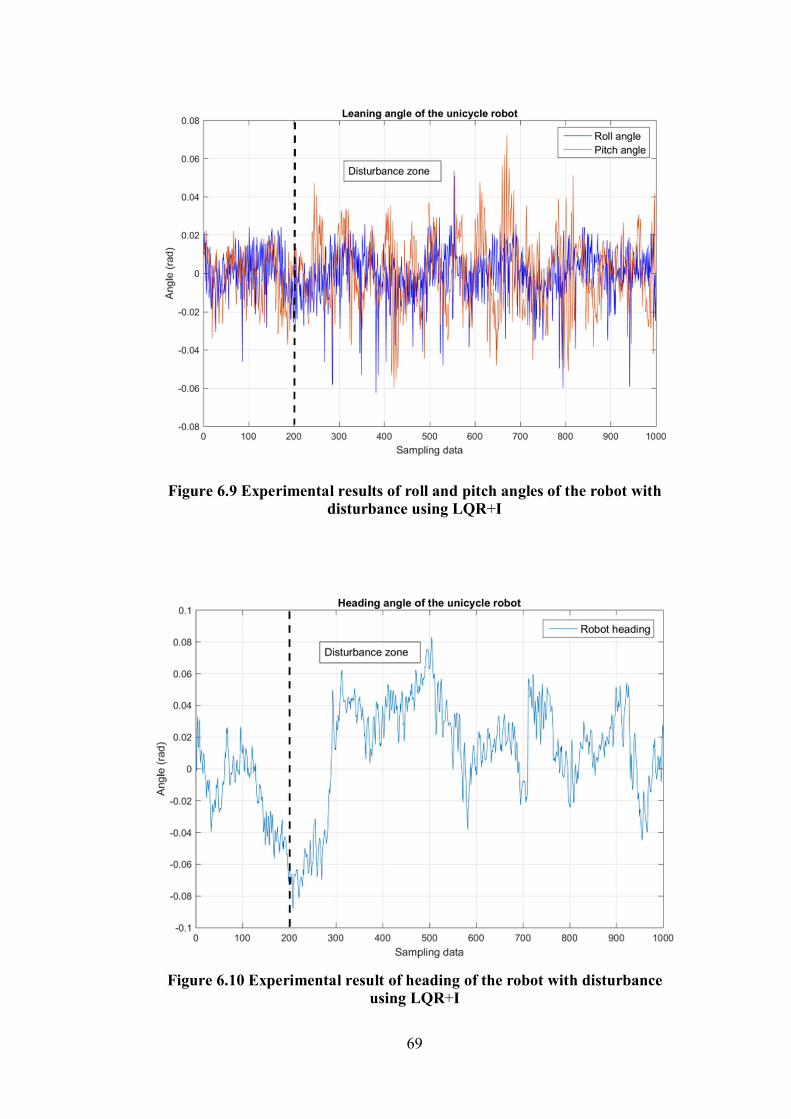
69
Figure 6.9 Experimental results of roll and pitch angles of the robot with disturbance using LQR+I
Figure 6.10 Experimental result of heading of the robot with disturbance
using LQR+I
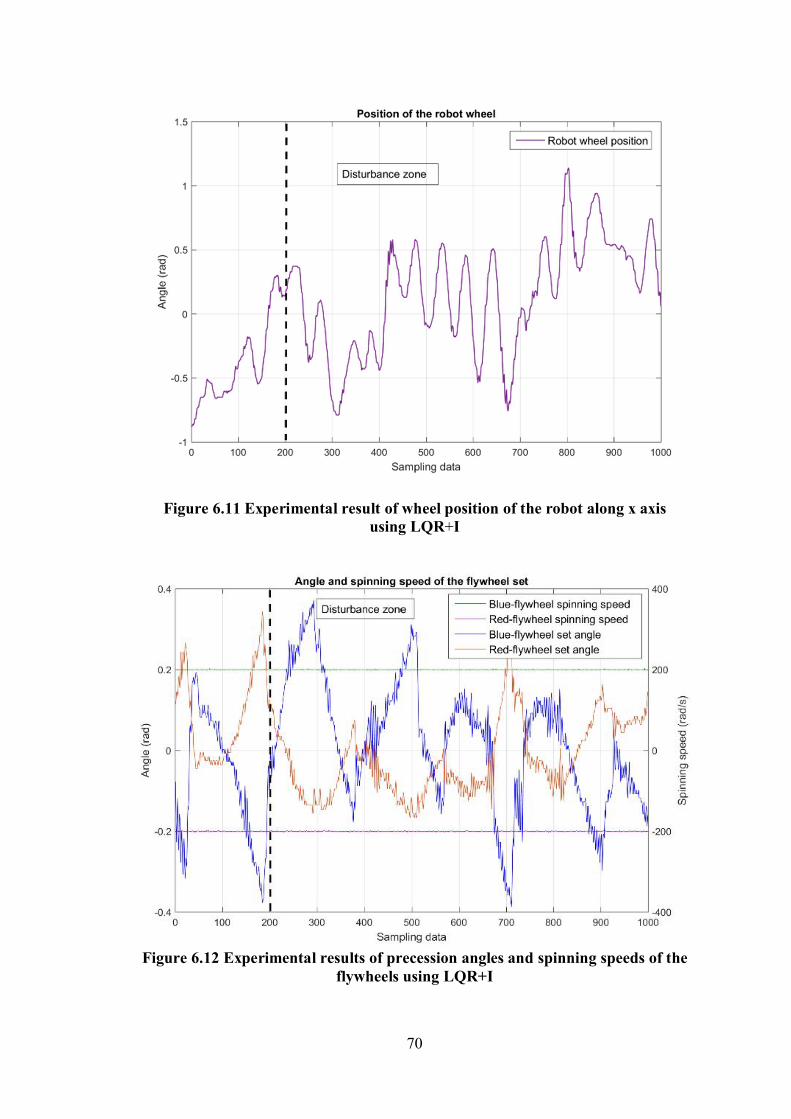
70
Figure 6.11 Experimental result of wheel position of the robot along x axis using LQR+I
Figure 6.12 Experimental results of precession angles and spinning speeds of the
flywheels using LQR+I
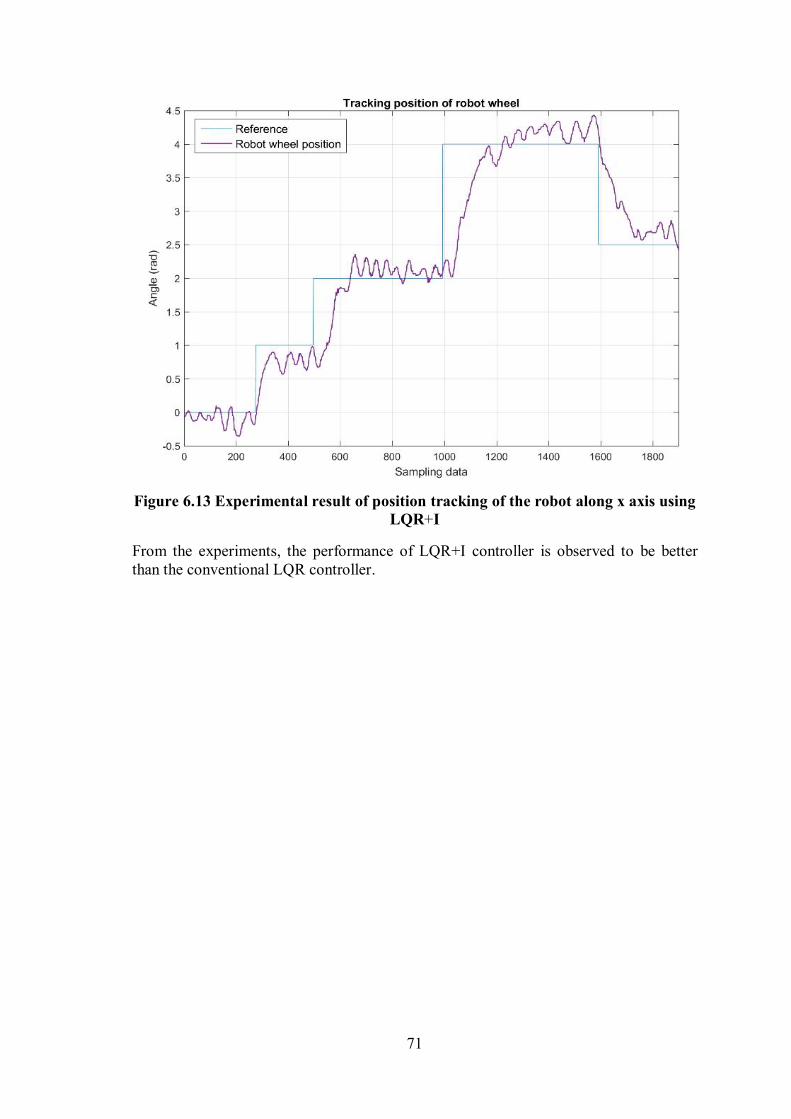
71
Figure 6.13 Experimental result of position tracking of the robot along x axis using
LQR+I
From the experiments, the performance of LQR+I controller is observed to be better than the conventional LQR controller.
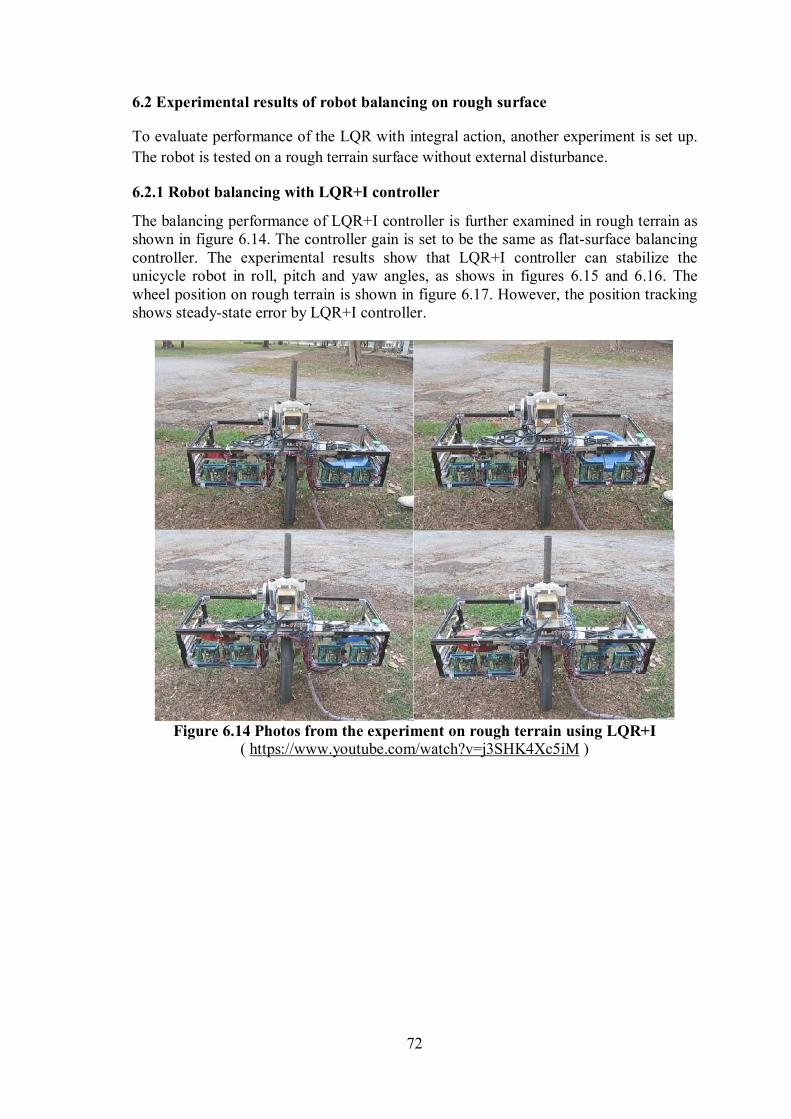
72
6.2 Experimental results of robot balancing on rough surface
To evaluate performance of the LQR with integral action, another experiment is set up.
The robot is tested on a rough terrain surface without external disturbance.
6.2.1 Robot balancing with LQR+I controller
The balancing performance of LQR+I controller is further examined in rough terrain as shown in figure 6.14. The controller gain is set to be the same as flat-surface balancing controller. The experimental results show that LQR+I controller can stabilize the unicycle robot in roll, pitch and yaw angles, as shows in figures 6.15 and 6.16. The wheel position on rough terrain is shown in figure 6.17. However, the position tracking shows steady-state error by LQR+I controller.
Figure 6.14 Photos from the experiment on rough terrain using LQR+I
( https://www.youtube.com/watch?v=j3SHK4Xc5iM )
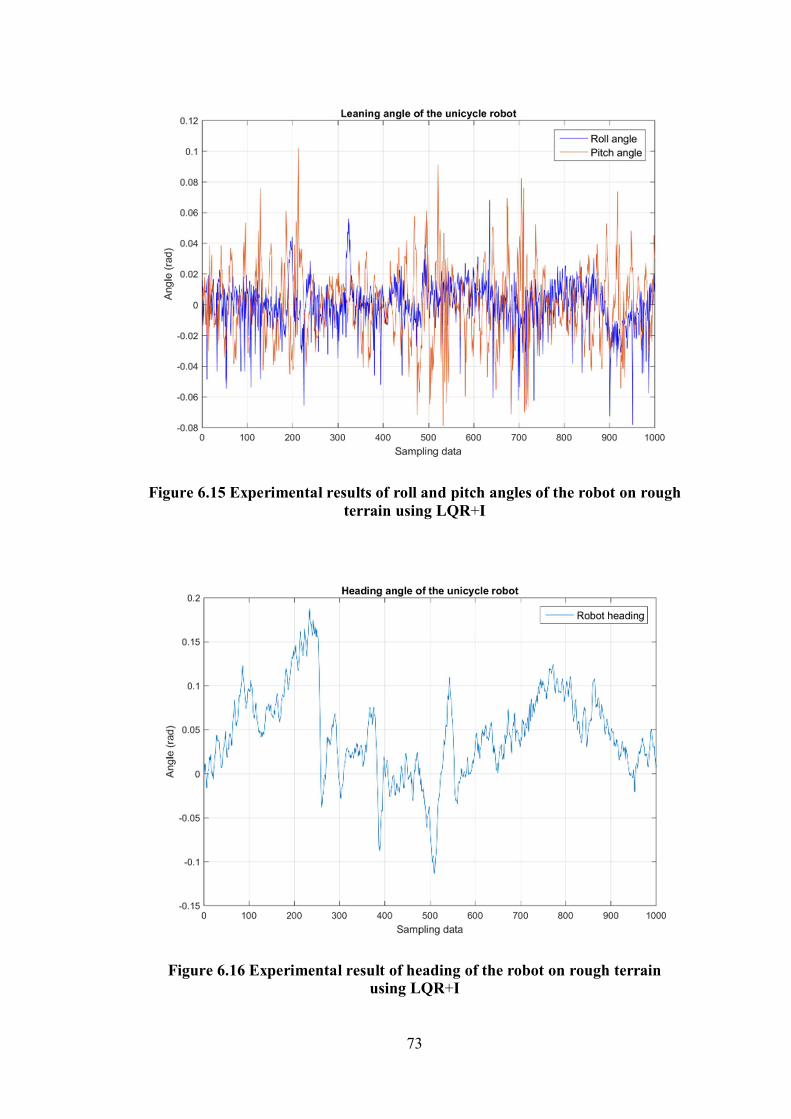
73
Figure 6.15 Experimental results of roll and pitch angles of the robot on rough terrain using LQR+I
Figure 6.16 Experimental result of heading of the robot on rough terrain using LQR+I
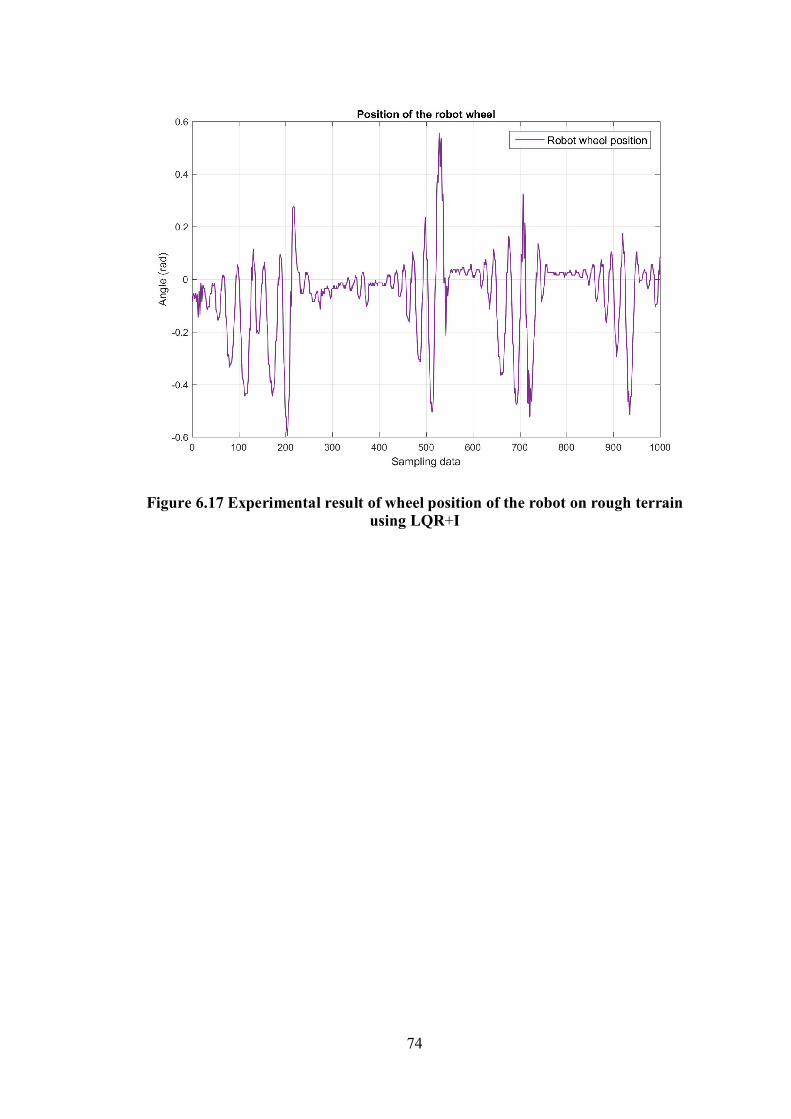
74
Figure 6.17 Experimental result of wheel position of the robot on rough terrain using LQR+I

75
CHAPTER 7 CONCLUSION AND FUTURE WORK
7.1 Conclusion
A unicycle robot with double flywheels was proposed in this dissertation. Double flywheels technique was designed for decoupling the robot’s roll and heading angles. By using double flywheels, the rolling torque increases compared with when only a single flywheel is used. Also, the inverted-pendulum technique was applied to balance the robot’s pitch angle. Mechanism design and hardware architecture were explained in details. Dynamic model of the unicycle robot was derived by using Euler-Lagrange method. It was linearized around the upright position. The unicycle robot was manufactured and assembled. The robot parameters were considered and identified. 32 bits ARM micro-controller was selected to control the unicycle robot. In this research, the control performance of the conventional LQR was compared with the proposed LQR+I by both simulations and experiments. The LQR+I showed better control performance than the conventional LQR. The LQR+I could effectively reject impact disturbance and eliminate steady-state error as seen from both simulations and experiments. In the LQR+I position tracking, the robot could move to the desired position and maintain balancing on the flat surface. Furthermore, the LQR+I controller could balance itself under rough terrain. However, position tracking on rough terrain showed steady-state error. It requires more robust controller than LQR+I.
7.2 Future work
The unicycle robot with double flywheels was designed and developed in order to prove the new design and concept of roll, pitch, and yaw control of the unicycle. The two flywheel sets were located at the left and the right of the robot's body in order to accommodate calibration and adjustment. In the further improvement, these two flywheel sets should be located as a stack in the robot's body in order to occupy less space and the motors with higher power should be selected in order to be able to balance and operate with passenger with weight up to 80 kg.
76
REFERENCES
[1] Schoonwinkel A. Design and test of a computer stabilized unicycle. CA: Stan- ford University; 1987. [2] Sheng Z, Yamafuji K. Realization of a human riding a unicycle by a robot. In: IEEE international conference on robotics and automation, vol.2; 1995. p.1319–26. [3] Nakajima R, Tsubouchi T, Yuta S, Koyanagi E. A development of a new mech- anism of an autonomous unicycle. In: Proceedings of the 1997 IEEE/RSJ inter- national conference on intelligent robots and systems. Real-world Application IROS ’97, 2; 1997. p.906–12. [4] Daud Y, Mamun AAl, Xu J-X. Properties of lateral-pendulum-controlled unicy- cle robot in states of balance and motion. In: 6th IEEE conference on robotics, automation and mechatronics; 2013. p. 162–7. [5] Lee JH, Shin HJ, Lee SJ, Jung S. Balancing control of a single-wheel inverted pendulum system using air blowers: evolution of Mechatronics capstone design. Mechatronics 2013; 23:926–32. [6] Majima S, Kasai T, Kadohara T. Design of a control method for changing yaw direction of an underacuatted unicycle Robot. In: TENCON 2006 IEEE Conference, vol. 10 ; 2006. p.1–4. [7] Majima S, Kasai T. A controller for changing the yaw direction of an underac- tuated unicycle robot. In: International conference on technology and automation., vol. 5; 2005. p. 73–88. [8] Daoxiong G, Qi P, Guoyu Z, Xinghui L. LQR control for a self-balancing unicycle robot on inclined plane. J Syst Des Dyn 2012;6:685–99. [9] Xu Y, Au SKW. Stabilization and path following of a single wheel robot. IEEE/ASME Trans Mechatronics 2004;9:407–19. [10] Thanh BT, Parnichkun M. Balancing control of bicyrobo by particle swarm op- timization-based structure-specified mixed H2/H∞ control. Int J Adv Robot Syst 2008;5:395–402. [11] Lee J, Han S, Lee J. Decoupled dynamic control for pitch and roll axes of the unicycle robot. IEEE Trans Ind Electron 2013;60:3814–22. [12] Sheng Z, Yamafuji K. Study of stability and motiom control of a unicycle (5th report: Experimental results by fuzzy gain schedule PD controllers) Journal of robotics and mechatronics., vol. 8 ; 1996. p.571–9. [13] Caldecott D, Edwards A, Haynes M, Jerbic M, Kadis A, Madigan R and Cazzolato B. Modelling, simulation and control of an electric unicycle. In Proceedings

77
of Australasian Conference on Robotics and Automation, Brisbane, Australia., vol. 13; 2010. [14] Kappeler, F. Unicycle robot. Technical report, Automatic Control Laboratory, Ecole Polytechnique Federale de Lausanne, 2007
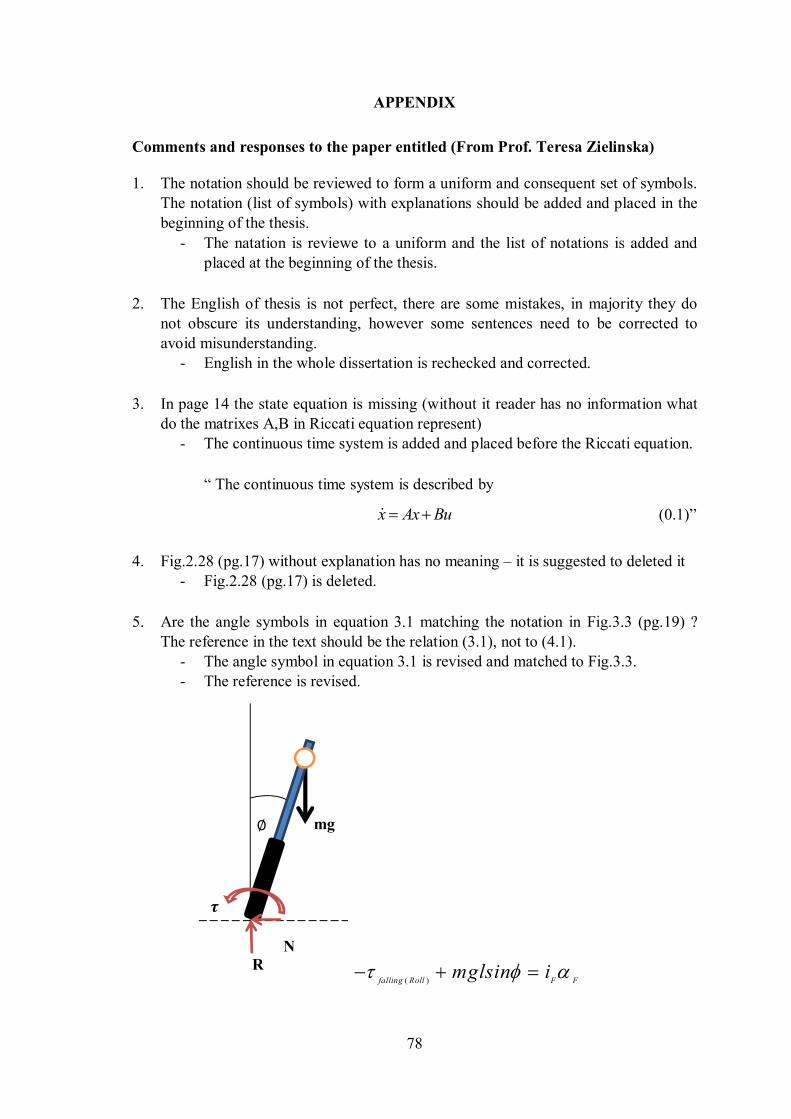
78
APPENDIX
Comments and responses to the paper entitled (From Prof. Teresa Zielinska) 1. The notation should be reviewed to form a uniform and consequent set of symbols.
The notation (list of symbols) with explanations should be added and placed in the beginning of the thesis.
- The natation is reviewe to a uniform and the list of notations is added and placed at the beginning of the thesis.
2. The English of thesis is not perfect, there are some mistakes, in majority they do not obscure its understanding, however some sentences need to be corrected to avoid misunderstanding.
- English in the whole dissertation is rechecked and corrected.
3. In page 14 the state equation is missing (without it reader has no information what do the matrixes A,B in Riccati equation represent)
- The continuous time system is added and placed before the Riccati equation.
“ The continuous time system is described by
x Ax Bu (0.1)”
4. Fig.2.28 (pg.17) without explanation has no meaning – it is suggested to deleted it
- Fig.2.28 (pg.17) is deleted.
5. Are the angle symbols in equation 3.1 matching the notation in Fig.3.3 (pg.19) ? The reference in the text should be the relation (3.1), not to (4.1).
- The angle symbol in equation 3.1 is revised and matched to Fig.3.3. - The reference is revised.
( )falling Roll F Fmglsin i
�
N R
mg ∅
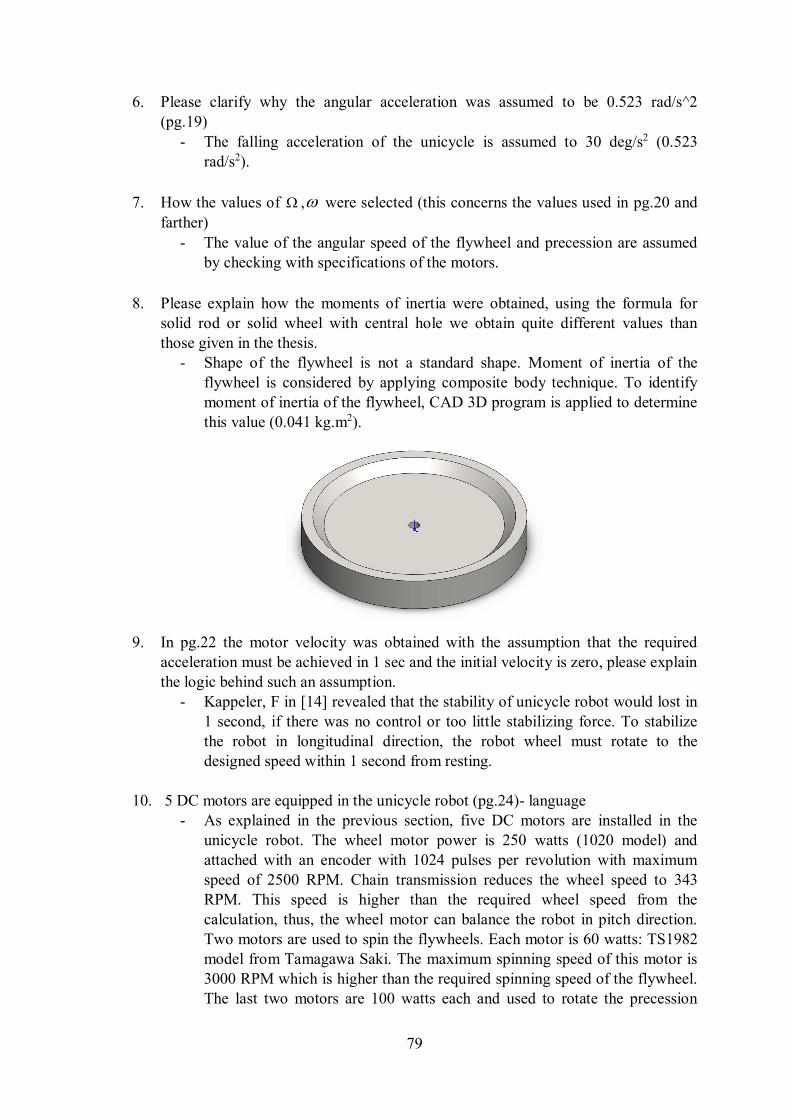
79
6. Please clarify why the angular acceleration was assumed to be 0.523 rad/s^2 (pg.19)
- The falling acceleration of the unicycle is assumed to 30 deg/s2 (0.523 rad/s2).
7. How the values of , were selected (this concerns the values used in pg.20 and
farther)
- The value of the angular speed of the flywheel and precession are assumed by checking with specifications of the motors.
8. Please explain how the moments of inertia were obtained, using the formula for solid rod or solid wheel with central hole we obtain quite different values than those given in the thesis.
- Shape of the flywheel is not a standard shape. Moment of inertia of the flywheel is considered by applying composite body technique. To identify moment of inertia of the flywheel, CAD 3D program is applied to determine this value (0.041 kg.m2).
9. In pg.22 the motor velocity was obtained with the assumption that the required acceleration must be achieved in 1 sec and the initial velocity is zero, please explain the logic behind such an assumption.
- Kappeler, F in [14] revealed that the stability of unicycle robot would lost in 1 second, if there was no control or too little stabilizing force. To stabilize the robot in longitudinal direction, the robot wheel must rotate to the designed speed within 1 second from resting.
10. 5 DC motors are equipped in the unicycle robot (pg.24)- language - As explained in the previous section, five DC motors are installed in the
unicycle robot. The wheel motor power is 250 watts (1020 model) and attached with an encoder with 1024 pulses per revolution with maximum speed of 2500 RPM. Chain transmission reduces the wheel speed to 343 RPM. This speed is higher than the required wheel speed from the calculation, thus, the wheel motor can balance the robot in pitch direction. Two motors are used to spin the flywheels. Each motor is 60 watts: TS1982 model from Tamagawa Saki. The maximum spinning speed of this motor is 3000 RPM which is higher than the required spinning speed of the flywheel. The last two motors are 100 watts each and used to rotate the precession
80
angle of each flywheel: Minertia DC motor, UGRMEM-02MA model. These motors are shown in figure 3.12.
11. In pg.22 the wheel motor speed 13.82 rpm was obtained, but it is not clear how in the specification of motors (pg.24) the value from pg.22 was used. Please clarify
- The detail is revised and presented in page 23. “Chain transmission reduces the wheel speed to 343 RPM .This speed is higher than the required wheel speed from the calculation, thus, the wheel motor can balance the robot in pitch direction.”
12. In pg.25 not an electrical circuit, but electronic hardware is illustrated. - The electrical circuit is revised to electronic hardware
13. What is the “signal controlling circuit” (pg.25) – I think that it is an amplifier - The circuit contains not only amplifier but also filter circuit.
14. In pg.27, it is stated that sensors monitoring part of the control system have lower
acting priority than the controlling part – in that case how the timely response to the posture change detected by sensor in achieved?
- The control law is repeated every 20 milliseconds by interrupt function from timer while sensors are monitored in looping of the main program. Sampling frequency of sensors monitoring is higher but less priority than control.
15. Pg.28: “the robot wheel considered at the center of gravity of the wheel” ? - Revised “The robot wheel is considered as a point which locates at the center
gravity of the wheel. Position vector from the origin point of the fixed world
coordinate points to the center of the robot wheel (0
r ).”
16. In formulas in pg.28 and pg.30 not all unit vector i,j,k are marked by dash, therefore is id not clear if x and y in both equation are symbolizing the same quantity? Please clarify the notation with indication of the reference frames.
- Revised (pg.28)
˙
0
( )sin( )( )cos( ) ( )cos( )
( )cos( )
(
ˆ
)
ˆ
ˆ
w
y rsinV r x rsin rsin i j
rcos
rsin k
- Revised (pg.29) ' ' ' '˙
1 ' '
' ' ' '
Sin( )Sin( )Sin( ) Cos( )Sin( ) Cos( )Cos( )Sin( )
Cos( )Sin( ) Cos( )Cos( )Sin( )
Cos( )Sin( )Sin( ) Cos( )Cos( ) Cos( )Cos( )Cos( )
Sin( )Sin( )
F F
F
F
F F
x l r lV r i
r l
y l r l
r
' '
' ' '
Cos( )Sin( )Sin( )
Cos( )Sin( ) Sin( ) Cos( )Sin( )
F
F F
jl
l r l k
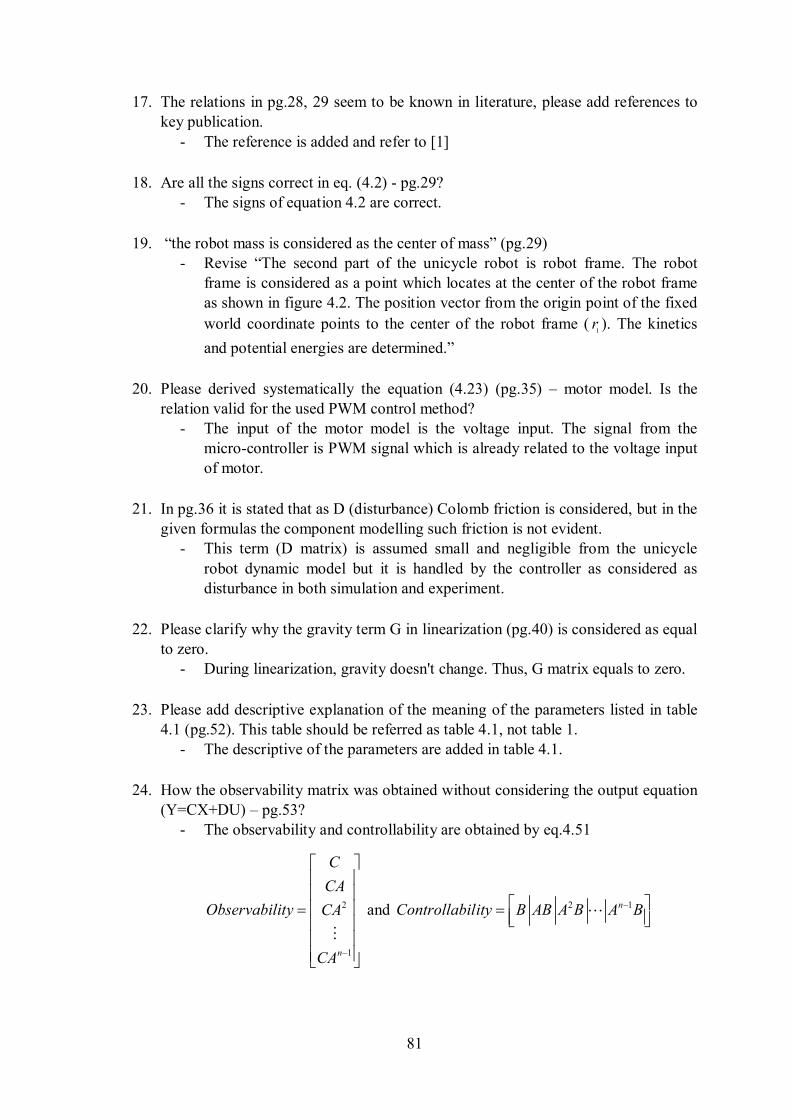
81
17. The relations in pg.28, 29 seem to be known in literature, please add references to key publication.
- The reference is added and refer to [1]
18. Are all the signs correct in eq. (4.2) - pg.29? - The signs of equation 4.2 are correct.
19. “the robot mass is considered as the center of mass” (pg.29) - Revise “The second part of the unicycle robot is robot frame. The robot
frame is considered as a point which locates at the center of the robot frame as shown in figure 4.2. The position vector from the origin point of the fixed
world coordinate points to the center of the robot frame (1
r ). The kinetics
and potential energies are determined.”
20. Please derived systematically the equation (4.23) (pg.35) – motor model. Is the relation valid for the used PWM control method?
- The input of the motor model is the voltage input. The signal from the micro-controller is PWM signal which is already related to the voltage input of motor.
21. In pg.36 it is stated that as D (disturbance) Colomb friction is considered, but in the given formulas the component modelling such friction is not evident.
- This term (D matrix) is assumed small and negligible from the unicycle
robot dynamic model but it is handled by the controller as considered as disturbance in both simulation and experiment.
22. Please clarify why the gravity term G in linearization (pg.40) is considered as equal to zero.
- During linearization, gravity doesn't change. Thus, G matrix equals to zero.
23. Please add descriptive explanation of the meaning of the parameters listed in table 4.1 (pg.52). This table should be referred as table 4.1, not table 1.
- The descriptive of the parameters are added in table 4.1.
24. How the observability matrix was obtained without considering the output equation (Y=CX+DU) – pg.53?
- The observability and controllability are obtained by eq.4.51
2
1n
C
CA
Observability CA
CA
and 2 1nControllability B AB A B A B
82
25. In pg.55 we read “By substitution of the state matrix A and input matrix B from equation (4.48) to (4.49) the matrix P is obtained” I do not think that it is correct, P
is obtained by solving Riccati equation (first from eq. 5.3 using A and B given by (4.48), (4.49).
- Revised as " By substitution of the state matrix ( A ) and the input matrix
( B ) from equations 4.48 and 4.49 to Riccati equation, matrix P can be
obtained. Then by substitution of matrix P into equation 5.3, the gain, K , will be obtained. The controller gain of LQR is shown in equation 5.4.".
26. Please give the values of K (gains) obtained for LQR and LQR+I controllers (pg.55, 59)
- The LQR controller gain is added and shown in in eq.5.4
59.3 1.4 5.1 0.45 17.2 2.7 2.8 2.3
( ) 5.9 2.8 7.4 0.09 3.7 13.5 1.2 0.23
6.3 0.12 88.1 3.1 6.2 7.2 14.4 2.8
K LQR
(0.2)
- The LQR+I controller gains is added and shown in eq.5.13
-
( )
80.1 2.0 5.2 0.8 17.5 2.7 8.8 4.9 69.1 0.7 0.0 0.10
2.5 38.7 7.5 0.0 3.7 13.8 13.4 4.7 1.5 3.1 0.09 0.3
0.1 3.5 100.9 5.9 6.3 7.1 16.6 4.4 0.4 0.3 10.0 3.1
K LQR I
(0.3)
27. Please give the eigenvalues of the original state matrix A and new matrixes A obtained in the synthesis of the above two controllers
- The eigenvalue of the original state matrix A is added in page 52.
[0.000, 0.000, -6.787, -4.083, 6.552, 0.3498+2.683i, 0.3498-2.683i, 3.6475]
- The eigenvalue of the state matrix A obtained from LQR controller is added in page 55.
- ]- 6.782, -6.543, -1.633+3.379i, -1.633-3.379i, -3.910+0.395i, -3.910-
0.395i, - 2.038, -0.010[
- The eigenvalue of the state matrix A obtained from LQR controller is added in page 58.
- ]- 6.770, -6.556, -1.603+3.402i, -1.603-3.402i, -3.905+0.125i, -3.905-
0.125i,-1.755, -1.153, -0.1738, -0.105, -0.069+0.067i, -0.069-0.067i.[
28. What was the model of the applied disturbances (pg.59)? - Impulse disturbance.

83
Non-linear dynamic model by s-function
S-function is the Simulink block that is applied to generate non-linear model of the unicycle robot. The code details present below. function [sys,x0,str,ts]=robot(t,x,u,flag,initial_pos) switch flag case 0 % Initialization [sys,x0,str,ts] = mdlInitializeSizes(initial_pos); case 1 % Compute derivatives of continuous states sys = mdlDerivatives(t,x,u); case 2 % Update sys = mdlUpdate(t,x,u); case 3 % Compute output vetor sys = mdlOutputs(x); case 9 % Finished sys = []; otherwise error(['unhandled flag = ',num2str(flag)]); end %******************************************************** %* mdlInitializeSizes * %******************************************************** function [sys,x0,str,ts]=mdlInitializeSizes(initial_pos) %Return the sizes of the system vectors, initial %conditions, and the sample times and offets. %The state vector has 8 continuous states. For i = 1 to 4, the continuous states are % x(i) = position i angle of unicycle robot % x(i+4) = position i velocity of unicycle robot %Input vector is % u(i) = the torque input for each movenent % %Output vector is % y(i) = position of unicycle robot % y(i+4) = velocity of unicycle robout position=zeros(4,1); velocity=zeros(4,1); for i = 1:4 position(i) = initial_pos(i); velocity(i) = initial_pos(i+4); end sizes = simsizes; % create the sizes structure sizes.NumContStates = 8; % number of continuous states sizes.NumDiscStates = 0; % number of discrete states sizes.NumInputs = 3; % number of inputs sizes.NumOutputs = 8; % number of outputs sizes.DirFeedthrough = 0; % direct feedthrough flag sizes.NumSampleTimes = 1; % number of sample times sys = simsizes(sizes); %load sys with the sizes structure str = []; %str is always an empty matrix

84
x0(1:4,1) = position(1:4,1); %Specify initial conditions for all states x0(5:8,1) = velocity(1:4,1); ts = [0,0]; % sample time: [period, offset] %******************************************************** %* mdlDerivatives * %******************************************************** function sys=mdlDerivatives(t,x,u) %Compute derivatives of continuous states mass=zeros(4,4); mass_inv=zeros(4,4); CC=zeros(4,1); %CC : the coriolis and centipetal terms flagj=zeros(4,1); mass(1,1)=6.9014*(cos(x(3)))^2+1.215*(sin(x(3)))^2+0.2459+0.25*40*(0.25+0.35*cos(x(3)))+0.35*40*cos(x(3))*(0.25+0.35*cos(x(3)))+0.25^2*2.5; mass(1,2)=-6.9014*cos(x(3))*cos(x(1))*sin(x(3))+1.215*cos(x(3))*cos(x(1))* sin(x(3))-0.35*40*cos(x(1))*sin(x(3))*(0.25+cos(x(3))*0.35); mass(1,3)=0; mass(1,4)=0; mass(2,1)=mass(1,2); mass(2,2)=6.9014*(cos(x(1)))^2*(sin(x(3)))^2+2.7225*(sin(x(1)))^2+1.215* cos(x(3))*(cos(x(1)))^2+0.1267*(sin(x(1)))^2+0.0637*(cos(x(1)))^2+0.5*0.25^2*40-0.5*40*0.25^2*cos(2*x(1))+0.25*cos(x(3))*0.35*40-0.5*0.25*cos(x(3)-2*x(1))*0.35*40-0.5*0.25*cos(x(3)+2*x(1))*0.35*40+0.75*0.35^2*40-0.25*0.35^2*40*cos(2*x(3))-0.125*0.35^2*40*cos(2*(x(3)-x(1)))-0.25*0.35^2*40*cos(2*x(1))-0.125*0.35^2*40*cos(2*(x(3)+x(1)))+ 0.25^2*2.5*(sin(x(1)))^2; mass(2,3)=2.7225*sin(x(1))+0.25*0.35*40*cos(x(3))*sin(x(1))+ 0.35^2*40*sin(x(1)); mass(2,4)=0.1267*sin(x(1))+0.25^2*40*(cos(x(2)))^2*sin(x(1))+0.25^2*40* (sin(x(2)))^2*sin(x(1))+0.25*0.35*40*cos(x(3))*(cos(x(2)))^2*sin(x(1))+ 0.25*0.35*40*cos(x(3))*(sin(x(2)))^2*sin(x(1))+0.25^2*40*(cos(x(2)))^2* sin(x(1))+0.25^2*40*(sin(x(2)))^2*sin(x(1)); mass(3,1)=mass(1,3); mass(3,2)=mass(2,3); mass(3,3)=2.7225+0.35^2*40; mass(3,4)=0.25*0.35*40*cos(x(3));
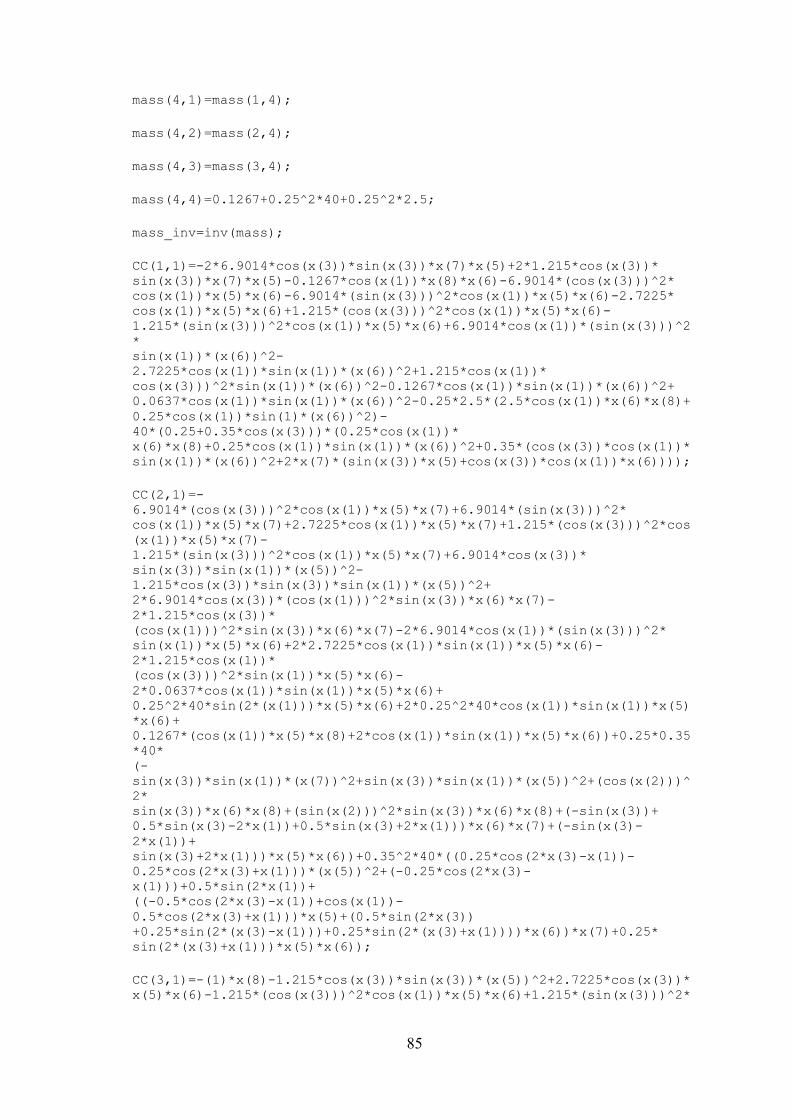
85
mass(4,1)=mass(1,4); mass(4,2)=mass(2,4); mass(4,3)=mass(3,4); mass(4,4)=0.1267+0.25^2*40+0.25^2*2.5; mass_inv=inv(mass); CC(1,1)=-2*6.9014*cos(x(3))*sin(x(3))*x(7)*x(5)+2*1.215*cos(x(3))* sin(x(3))*x(7)*x(5)-0.1267*cos(x(1))*x(8)*x(6)-6.9014*(cos(x(3)))^2* cos(x(1))*x(5)*x(6)-6.9014*(sin(x(3)))^2*cos(x(1))*x(5)*x(6)-2.7225* cos(x(1))*x(5)*x(6)+1.215*(cos(x(3)))^2*cos(x(1))*x(5)*x(6)-1.215*(sin(x(3)))^2*cos(x(1))*x(5)*x(6)+6.9014*cos(x(1))*(sin(x(3)))^2* sin(x(1))*(x(6))^2-2.7225*cos(x(1))*sin(x(1))*(x(6))^2+1.215*cos(x(1))* cos(x(3)))^2*sin(x(1))*(x(6))^2-0.1267*cos(x(1))*sin(x(1))*(x(6))^2+ 0.0637*cos(x(1))*sin(x(1))*(x(6))^2-0.25*2.5*(2.5*cos(x(1))*x(6)*x(8)+ 0.25*cos(x(1))*sin(1)*(x(6))^2)-40*(0.25+0.35*cos(x(3)))*(0.25*cos(x(1))* x(6)*x(8)+0.25*cos(x(1))*sin(x(1))*(x(6))^2+0.35*(cos(x(3))*cos(x(1))* sin(x(1))*(x(6))^2+2*x(7)*(sin(x(3))*x(5)+cos(x(3))*cos(x(1))*x(6)))); CC(2,1)=-6.9014*(cos(x(3)))^2*cos(x(1))*x(5)*x(7)+6.9014*(sin(x(3)))^2* cos(x(1))*x(5)*x(7)+2.7225*cos(x(1))*x(5)*x(7)+1.215*(cos(x(3)))^2*cos(x(1))*x(5)*x(7)-1.215*(sin(x(3)))^2*cos(x(1))*x(5)*x(7)+6.9014*cos(x(3))* sin(x(3))*sin(x(1))*(x(5))^2-1.215*cos(x(3))*sin(x(3))*sin(x(1))*(x(5))^2+ 2*6.9014*cos(x(3))*(cos(x(1)))^2*sin(x(3))*x(6)*x(7)-2*1.215*cos(x(3))* (cos(x(1)))^2*sin(x(3))*x(6)*x(7)-2*6.9014*cos(x(1))*(sin(x(3)))^2* sin(x(1))*x(5)*x(6)+2*2.7225*cos(x(1))*sin(x(1))*x(5)*x(6)-2*1.215*cos(x(1))* (cos(x(3)))^2*sin(x(1))*x(5)*x(6)-2*0.0637*cos(x(1))*sin(x(1))*x(5)*x(6)+ 0.25^2*40*sin(2*(x(1)))*x(5)*x(6)+2*0.25^2*40*cos(x(1))*sin(x(1))*x(5)*x(6)+ 0.1267*(cos(x(1))*x(5)*x(8)+2*cos(x(1))*sin(x(1))*x(5)*x(6))+0.25*0.35*40* (-sin(x(3))*sin(x(1))*(x(7))^2+sin(x(3))*sin(x(1))*(x(5))^2+(cos(x(2)))^2* sin(x(3))*x(6)*x(8)+(sin(x(2)))^2*sin(x(3))*x(6)*x(8)+(-sin(x(3))+ 0.5*sin(x(3)-2*x(1))+0.5*sin(x(3)+2*x(1)))*x(6)*x(7)+(-sin(x(3)-2*x(1))+ sin(x(3)+2*x(1)))*x(5)*x(6))+0.35^2*40*((0.25*cos(2*x(3)-x(1))-0.25*cos(2*x(3)+x(1)))*(x(5))^2+(-0.25*cos(2*x(3)-x(1)))+0.5*sin(2*x(1))+ ((-0.5*cos(2*x(3)-x(1))+cos(x(1))-0.5*cos(2*x(3)+x(1)))*x(5)+(0.5*sin(2*x(3)) +0.25*sin(2*(x(3)-x(1)))+0.25*sin(2*(x(3)+x(1))))*x(6))*x(7)+0.25* sin(2*(x(3)+x(1)))*x(5)*x(6)); CC(3,1)=-(1)*x(8)-1.215*cos(x(3))*sin(x(3))*(x(5))^2+2.7225*cos(x(3))* x(5)*x(6)-1.215*(cos(x(3)))^2*cos(x(1))*x(5)*x(6)+1.215*(sin(x(3)))^2*
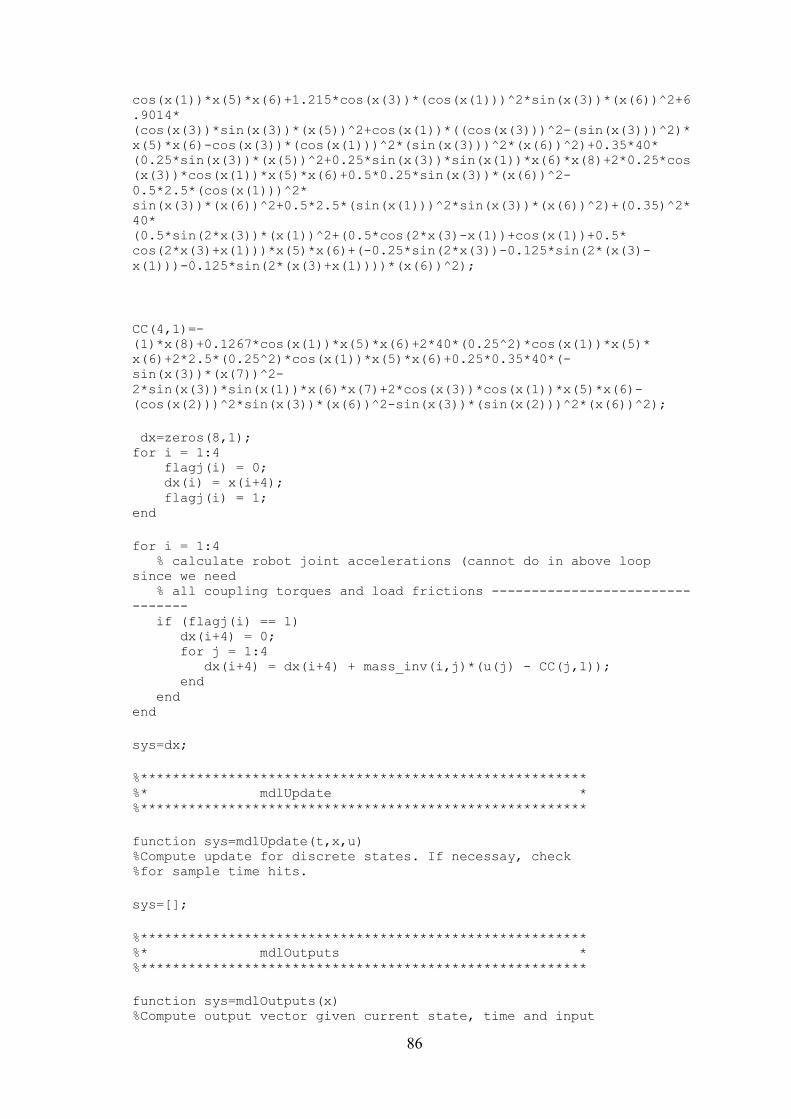
86
cos(x(1))*x(5)*x(6)+1.215*cos(x(3))*(cos(x(1)))^2*sin(x(3))*(x(6))^2+6.9014* (cos(x(3))*sin(x(3))*(x(5))^2+cos(x(1))*((cos(x(3)))^2-(sin(x(3)))^2)* x(5)*x(6)-cos(x(3))*(cos(x(1)))^2*(sin(x(3)))^2*(x(6))^2)+0.35*40* (0.25*sin(x(3))*(x(5))^2+0.25*sin(x(3))*sin(x(1))*x(6)*x(8)+2*0.25*cos(x(3))*cos(x(1))*x(5)*x(6)+0.5*0.25*sin(x(3))*(x(6))^2-0.5*2.5*(cos(x(1)))^2* sin(x(3))*(x(6))^2+0.5*2.5*(sin(x(1)))^2*sin(x(3))*(x(6))^2)+(0.35)^2*40* (0.5*sin(2*x(3))*(x(1))^2+(0.5*cos(2*x(3)-x(1))+cos(x(1))+0.5* cos(2*x(3)+x(1)))*x(5)*x(6)+(-0.25*sin(2*x(3))-0.125*sin(2*(x(3)-x(1)))-0.125*sin(2*(x(3)+x(1))))*(x(6))^2);
CC(4,1)=-(1)*x(8)+0.1267*cos(x(1))*x(5)*x(6)+2*40*(0.25^2)*cos(x(1))*x(5)* x(6)+2*2.5*(0.25^2)*cos(x(1))*x(5)*x(6)+0.25*0.35*40*(-sin(x(3))*(x(7))^2-2*sin(x(3))*sin(x(1))*x(6)*x(7)+2*cos(x(3))*cos(x(1))*x(5)*x(6)-(cos(x(2)))^2*sin(x(3))*(x(6))^2-sin(x(3))*(sin(x(2)))^2*(x(6))^2); dx=zeros(8,1); for i = 1:4 flagj(i) = 0; dx(i) = x(i+4); flagj(i) = 1; end for i = 1:4 % calculate robot joint accelerations (cannot do in above loop since we need % all coupling torques and load frictions -------------------------------- if (flagj(i) == 1) dx(i+4) = 0; for j = 1:4 dx(i+4) = dx(i+4) + mass_inv(i,j)*(u(j) - CC(j,1)); end end end sys=dx; %******************************************************** %* mdlUpdate * %******************************************************** function sys=mdlUpdate(t,x,u) %Compute update for discrete states. If necessay, check %for sample time hits. sys=[]; %******************************************************** %* mdlOutputs * %******************************************************** function sys=mdlOutputs(x) %Compute output vector given current state, time and input
87
position=zeros(4,1); velocity=zeros(4,1); for i = 1:4 position(i) = x(i); velocity(i) = x(i+4); end sys(1:4,1)=position; sys(5:8,1)=velocity;






![OmBURo: A Novel Unicycle Robot with Active ...junjie/publication/OmBURo A Novel...A robot that uses a ball instead of a wheel (a.k.a. Ballbot [1], [19], [20]) can move in any arbitrary](https://img.pdfslide.us/doc/110x75/5fa3c15260725b3c6b7f5676/omburo-a-novel-unicycle-robot-with-active-junjiepublicationomburo-a-novel.jpg)





















