Embed Size (px)
Citation preview
TENSOR ANALYSIS ifJTH APPLICATIONS TO
RIEMAMN SPACES
APPROVED n
Hi 3 or
V-,Jgjo-v. Minor Professor"**
Director of the Department of Mathematics
Dean of the Graduate School

TENSOR ANALYSIS WITH APPLICATIONS TO RIEMAM SPACES
THESIS
Presented to the Graduate Council of the
Uorth Texas State University in Partial
Fulfillment of the Requirements
For the Degree of
MASTER OP SCIENCE
By-
William H. Osborne, B. S<
Denton, Texas
January, 1966

TABLE OF CONTENTS
Chapter Page
I. PROPERTIES OP TENSORS 1
II. RIEMANN SPACES 33
BIBLIOGRAPHY 48
iii

CHAPTER I
PROPERTIES OP TENSORS
In this paper three assumptions will be made. The first
assumption will be a knowledge of the real numbers. The sec-
ond will be that S is a set of points.
Definition 1.1: n-Tuple of Real Numbers A n-tuple is
1 2 n
an ordered set of n real numbers of the form (a ,a ,...,a ),
where a"*", i=1,2,...,n, is a real number.
The third assumption that will be made is that there is
a one-to-one mapping of a set of n-tuples of real numbers to
the set of points S. A one-to-one mapping will mean that
there is only one n-tuple associated with a given point and
only one point associated with a given n-tuple under the map-
ping used.
Definition 1.2: Coordinate System' The set of n-tuples
in the above paragraph will be called a coordinate system and
a n-tuple in that set will be called the coordinate of a
point.
Definition 1.3: Connected Set of Real Numbers A set of
real numbers is connected if and only if for x in the set R
of real numbers then R will be defined by one and only one of
the following sets. There is a real number a and a real num-
ber b such that,
1) a<x<b, 4) a<x, 7) x^b, or
2) a*<x<b, 5) a^x, 8) x = any real number
3) a<x^b, 6) x<b,
Definition 1.4: Connected n-TuPle A set H of n-tuples
of real numbers is a set of connected n-tuples if and only If
thirfe- exist: sets R.j ,R?, ... ,Rn such, that for each p, where
1^p^n, Ep is a connected set of real numbers and the n-tuple
*1 2 XL 1 (a ,a ,...,a ) is an element of H if and only if a is in , 2 21 ct • is in Rg * * • • > in *
Definition 1.5J Connected Coordinate System If the
coordinate system is a set of connected n-tuples then the
coordinate system is connected. All coordinate systems in
this worlc will be connected.
Definition 1.6: Open Set of Points in a Coordinate
System If S is a set of points then an open set of S with
respect to some coordinate system X is a .subset ¥ of S so H O y\
that if P is in ¥ and (x ,x ,...,x ) is the coordinate of P
then there is a positive real number 8 so that if the sum
(x1- a1 )2+ (x2- a2)2+...+(xn- an)2<62 then (a1 ,a2,...,an) is
in ¥. Definition 1.7: Vector Space The set of n-tuples which
form a coordinate system will be called a n-dimensional vec-
tor space V •
Definition 1.8: Transformations If each of X and Y is
a coordinate system, and ¥ is an open set of points with

respect to X, then a transformation T from X to Y In W is a
set of n functions y ,y , . . . , y so that if P is in ¥, the
coordinate of P in X is (x1,x2,...,xn) and the coordinate of
P in I Is ( y 1 , y 2 , . . . , y n ) then y i= y ^ x 1 ,x2, ...,xn), where
i-— 1)2)... ,n.
Definition 1.9s Permissible Transformations If I is a •"""d. -i , transformation such that for each y in T, 1=1,2,...,n, y is
a real, single-valued, reversible functional transformation
of the form y^=y^(x), where y^ (x)=y** (x1 ,x2, •.. ,xn), and if
y^(x) is continuous together with its third partial derivative
in some region R of Vn then T will be a permissible transfor-
mation. It will be assumed that these n equations will be
solvable for x3" so that xi=xi(y1 ,y2, ...,yn)=xi(y). This set
of n equations will be called the inverse of T and denoted
by T"1. All transformations used in this paper will be per-
missible transformations.
Definition 1.10: Admissible Coordinate Systems A col-
lection of coordinate systems such that if X and 1 are
elements of 0 then there exists a permissible transformation
T so that T(X)=Y will be called a set of admissible coordinate
systems. All coordinate systems in this paper will be this
type.
Definition 1.11: Range Convention A suffix which
occurs Just once in a term implies that this suffix will
range in value from 1 to n.
Definition 1.12: Summation Convention A suffix which
occurs just twice in a term implies summation with respect
to that suffix over the range 1,2,...,n.
Definition 1.13; Oovariant Tensor Let ¥ be a set of
points and let S "be a set of coordinate systems so that,
1) if X is in S then ¥ is an open set with respect to X
2) if X is in S and I is in S then there is a permissible
transformation T of X to I in ¥
3) there is a positive integer r so that if X is in S
then there exists nr real valued functions A. * ,(x) X,
associated with X whose domain contains the X coordi-
nate of the points in ¥
4)-a if X is in S and Y is in S, I is the transformation
of X to I in ¥, |Ai( i s tiie se,fc functions
associated with X, {B., ^(y)} is "the of func-«Ji Ja. * • • or J
tions associated with I, and P is- a point in ¥ so
that x is the X coordinate of P, y is the coordinate
in Y of P, then ax1' ox1*
Bdi 3 a..Ory ) = ay3' sy*5A"*By^Ai|iA...i/J
x)
Let C be the class of sets of functions so that a set
{AJ. * . (x) h belongs to 0 if and only if there is a s 2.j ZL • • • JLy* -> X in S so that ^ ^ (x)} is associated with the
.f . • mXf,
coordinate system X. Then 0 will be called a covari-
ant tensor of rank r with respect to the set S. The
set {a^ ^ associated with the X coordinate
system will "be called the components of the tensor C
in X,
4-b if the first three of the above conditions are true
and if X is in S and I is in S, T is the transforma-
tion of X to Y in ¥, A(x) is a function associated
with X, B(y) is a function associated with Y, and P
is a point in ¥ so that x is the X coordinate of P,
y is the Y coordinate of P, then B(y) = A(x). Let 6
be the set of functions so that A(x) belongs to 0 if
and only if there is a X in S so that A(x) is asso-
ciated with X. Then 0 will be called a covariant
tensor of rank zero with respect to the set S or a
tensor of rank; zero. The function A(x) will be
called the component of 0 in X.
Definition 1.14: Oontravariant Tensor Let I be a set
of points and let S be a set of coordinate systems so that,
1) if X is in S then ¥ is an open set with respect to X
2) if X is in S and Y is in S then there is a permissi-
ble transformation T of X to Y in ¥
3) there is a positive integer r so that if X is in S
then there exist' n2"* real valued functions A"' * #^(X)
associated with X whose domain contains the X coordi-
nate of the points in ¥
4)-a if X is in S and Y is in S, T is the transformation

of X to Y in ¥, jA^ "*"A* * ,if,(x )J- Is the set of functions
associated with. X, •k***^r(y)} is the set of func-
tions associated with Y, and P is a point in ¥ so
that x is the X coordinate of P, and y is the Y co-
ordinate of P, then
ax1' sx a ixlr
Let 0 be the class of sets of functions so that a set
A"3"' * * '^(x )| belongs to 0 if and only if there is a
X in S so that -[a1' * * *i|r(x)} Is associated with the
coordinate system X. Then 0 will be called a contra-
variant tensor of ranlc r with respect to the set S.
The set -[a1' ^ " * '\x)j associated with the X coordin-
ate system will be called the components of the tensor
0 in X.
4)-b a contravariant tensor of ranlc zero will be as
stated in 4)-b of definition 1.13.
Definition 1.15: Mixed Tensor Let ¥ be a set of points
and let S be a set of coordinate systems so that,
1) if X is in S then ¥ is an open set with respect to X
2) if X is in S and Y is in S then there is a permis-
' sible transformation T of X to Y in ¥
3) there is a positive integer r+s, r and s are positive
integers, so that if X is in S then there are n
real valued functions ^ ' ^ " ' ^ ( x ) associated with X (Xj U.£» • •U»f*
whose domain contains the X coordinates of the points

in ¥
4) if X is in S and Y is in S, T is the transformation
of X to I in If, *]] sr(x)} i s se-fc associ-
ated with X, {b|' i *** (y)j" is the set of functions s ' X| • • • X|* J
associated with Y, and P is a point in W so that x is
the X coordinate of P, y is the Y coordinate of P,
then . , Sy ' Sy^a 5y^ dxa' dxaa bxa.r R R
B?' •••ky) = — B — b — i — i ' " — " ' a < x > l< **'xr 3xp< Bx * Bx * Sy 1 dy 4 Sy 1^ * * *a
Let 0 he the class of sets of functions so that a set
f J3, "belongs to 0 if and only if there is a X W CCj • • •OCjf J
in S so that ]]*^(x)} i s associated with the X
coordinate system. Then C will he called a mixed
tensor contravariant of rank s and covariant of rank
r with respect to the set S. The set -[a^
will he called the components of the tensor 0 in X.
A mixed tensor is of rank zero if it satisfies 4)-h
of definition 1.13.
Definition 1.16; Krone eke r Delta and Kronecker Delta
Function 6^(x) S'jj (x) = 6^ = 1, if i = j
S j(x) = 6* = 0, if i / 3
Definition 1.17: Invar lance If A?' ***^(x), 1 , i = 1 LI-': '•jn 1 1JL 1 " XI • • • (X U#
1,2,...,lc, is a set of functions in the X coordinate system,
b3, •••i(y), i 1 = 1,2,...,k, is a set of functions in the Y J • • * 1 ^ (X cx

8
coordinate system, and T(x) = y, where T is a permissible
transformation, then if jJ1 *"Mx) - B?' the sets of
JLj • • •Xf
functions will be said to be invariant.
1 2 21
Lemma 1.1 If x ,x , ...,x are n independent variables then = 6"L
a x ' dx1 Sx1
Proof: If i = J then — . = — . = 1. If i / j then ± 1 5xJ dx
since x and xJ are n independent variables it follows that
ax1 ax1 , -—j = 0. Therefore * = 6,, S x 3 x i i 1 2 n
Lemma 1.2 If T(x) = y and y = y (x ,x ,...,x ), i=1,...,n,
then = 6*
^ , Proof: By lemma 1.1 — . = 6Jt By the chain rule of
i i h7a J i a differentiation ^ so that ^ = 6^.
hyt 3xa Sy3 Sxa dy3
Theorem 1.1 If the components of a tensor are zero for
all x in their domain in one coordinate system then they are
zero in all other coordinate systems.
Proof: Let A(i,x), i=1,2,...,k, denote the components
of some'tensor in the X coordinate system such that A(i,x) is
zero for every i. Then if B(i,y) are the components in the I
coordinate system, B(i,y) = K A(a,x), where K are the appro-vX UL
priate partial derivatives. But A(a,x) is zero for each a so
that B(i,y) = Ka(0) = 0. Therefore each component in the Y
coordinate system is zero. A tensor whose components are all
zero will be called a zero tensor.

Definition 1.18: Sum of Two Tensors Let a|' and ~'~"r " r m J«i • • • Jup
"""Hx) be the components of two tensors in the X coordi-If • • • Jup
nate system such, that both tensors have the same covariant
ranlc and contravariant rank and a common open set in their
domains. Then the sum of the two tensors in the X coordinate
system, denoted by a|' **"3s(x)+A$' #***'(x), will be the set Jmf • • • Xfn JLj # • • JL[*
{a«' * * '^(x)+a|' ***^(x)}, where the suffixes are the same. V Jmf • • •Jmf* X J • • • Xjj* <*
Definition 1.19: Difference of Two Tensors The dif-
ference of two tensors will be defined in the same way as the
sum of two tensors, except wherever there is a plus a minus
will be substituted. The difference will be denoted by
XI • • • JLj* JL I • • • JLjn
Theorem 1.2 The sum (or difference) of two tensors with
the same contravariant rank and covariant rank is a tensor of
the same type and ranlc as the given tensors.
P;roo'f: Let H and H be two tensors of the same type and
rank defined over the same open set of points. The law of
transformation is given by
, , Sxa' 3xa* Sy1' dy1' B B BV * • * (y ) = — •••—, — 3 ; * *—b A®' • • 7(x)
J$ Sy ' dyk ax3' 5xPr ai#,*as
3xa' Sxa^ 3v "' 3v^r
" ayJ, ay3,dxB, Sx^r ' * * *a5
where A > '"^(x) and B^' * **V(y) are components of H and (Xj • • • &£ J i • • • J $
'"ir(x) and B^,#*^r(y) are components of H. Then by di • • •ctj ji • • •us
adding (or subtracting) and factoring yields
10
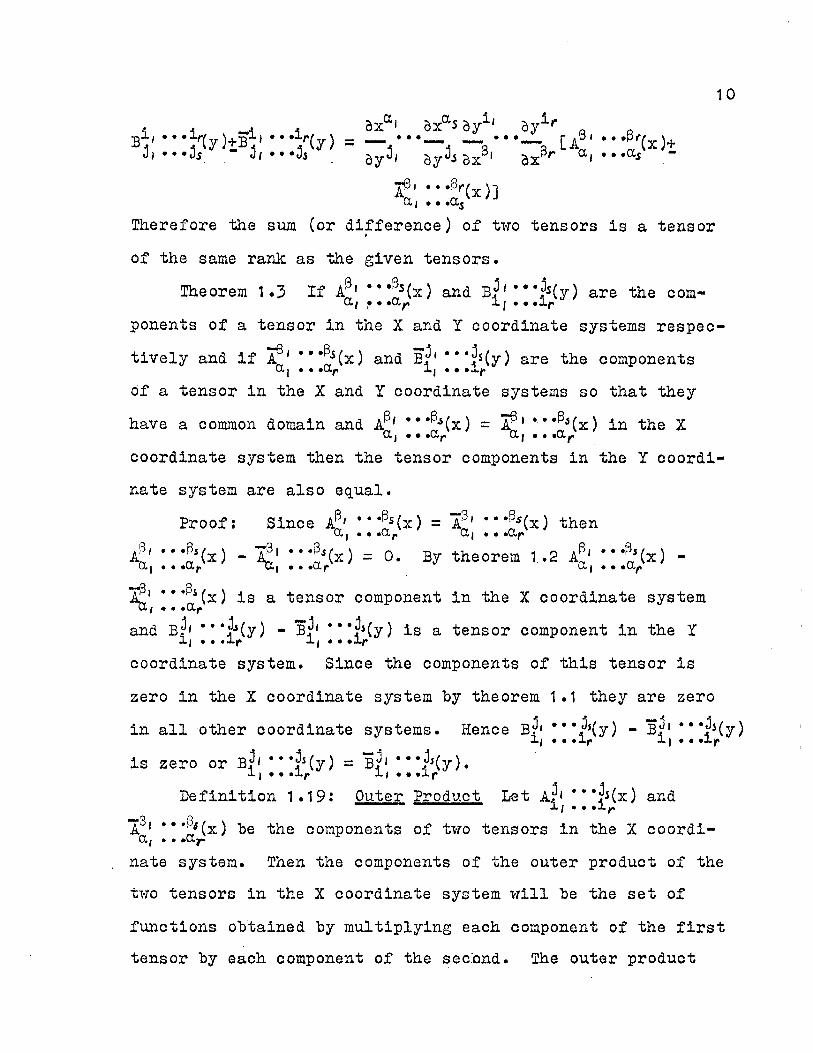
1 1 - 1 1 a*a' ^"say1' ayir _ „ Bt' •••hy)+B^ •*7(y) = —<•••—, —,•••—= JI * • • SyJ, ay^j Sx ' 3x r
S' vXj • • •cx
Therefore the sum (or difference) of two tensors Is a tensor »
of the same rank as the given tensors.
Theorem 1.3 If A%' * * *?s(x) and are the com-CXj • « •U,» X j • • • Xj*
ponents of a tensor in the X and Y coordinate systems respec-
tively and if A^' "'^(x) and Bj' ,#*^s(y) are the components CXj • • •CCi X| • • •A.p
of a tensor in the X and Y coordinate systems so that they
have a common domain and A ' **"^(x) = A^' ***fJ(x) in the X CX j • • •CC CX | • • «CX
coordinate system then the tensor components in the Y coordi-
nate system are also equal.
Proof: Since **fs(x) = if1 #"^(x) then CX | • • •CX f» CX | • • •CXp
A?' "#Es(x) - 2 ' ""^(x) = 0. By theorem 1.2 A*?' '"^Cx) " CX j • • •CXj. CX| • • •CXf CX | • • •Qyt •H3 B ir1 is a tensor component in the X coordinate system CX j mm •CXy» and Bj' "*ja(y) - Bi®' ***i®4(y) is a tensor component in the Y
Xj • • • J-p X| • • #Xf*
coordinate system. Since the components of this tensor is
zero in the X coordinate system by theorem 1.1 they are zero
in all other coordinate systems. Hence b|' ***A(y) - b|' *#*|s(y) Xj • • • Xf* X | • • *x
is zero or b|' ***|J(y) = B^' Xj • • •JLp X j • • *X |f
Definition 1.19: Outer Product Let A*1 "'k(x) and " Xi • • »x
I 0 0 AJ **V(x) be the components of two tensors in the X coordi-a i • • »cxy-»
nate system. Then the components of the outer product of the
two tensors in the X coordinate system will be the set of
functions obtained by multiplying each component of the first
tensor by each component of the second. The outer product
11
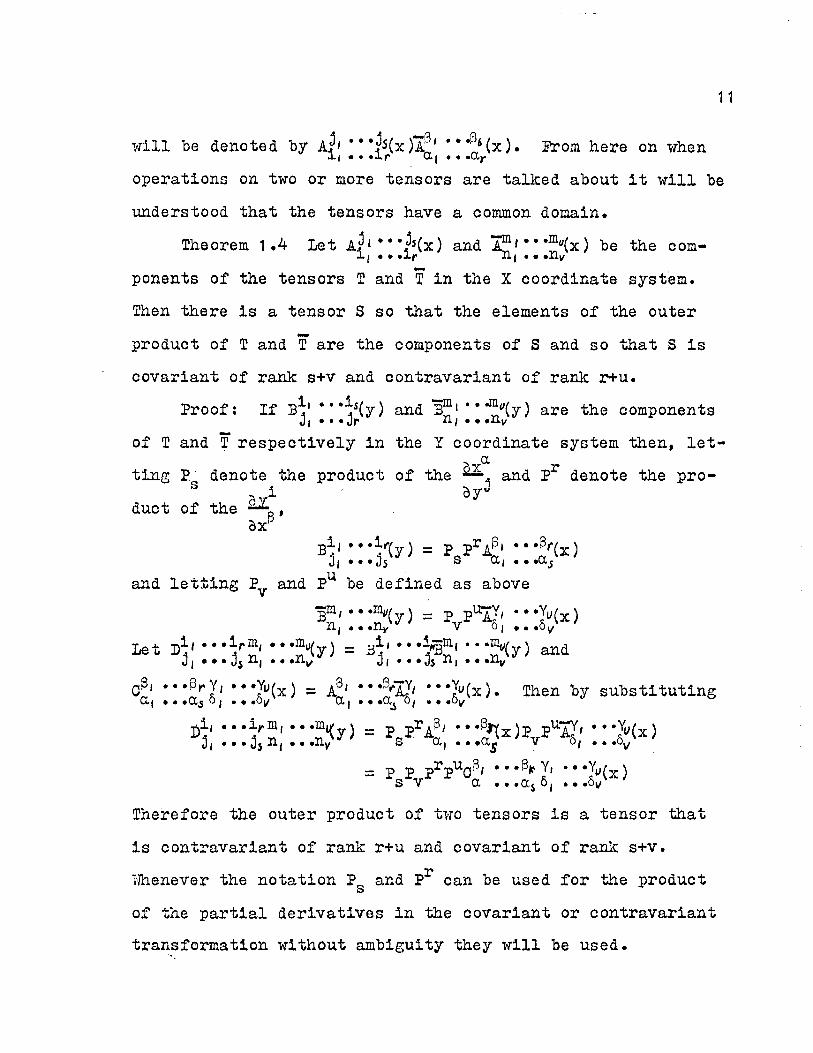
will be denoted by A,' * * * 5(x)*A.f' * **j^(x). Prom here on when X| • • •xr ex| • # »(Xy
operations on two or more tensors are talked about it will be
understood that the tensors have a common domain.
Theorem. 1 . 4 L e t A ^ ' * * * | s ( x ) a n d l ? ' * * i M x ) be t h e c o m -a. j • • «>Xjr II | • • •Xiy
ponents of the tensors T and T in the X coordinate system.
Then there is a tensor S so that the elements of the outer
product of T and T are the components of S and so that S is
covariant of rank s+v and contravariant of rank r+u.
Proof: If b1' "'^(y) and B?1 ' * * "(y) are the components J j • • • 11/ • • •XLy
of T and T respectively in the Y coordinate system then, let-
ting P_ denote the product of the and P r denote the pro-ay1 ' ay3
duct of the , 3xp
Bi| = p pr/, Jj • • • » U| • •
and letting Py and Pu be defined as above
wa, ...%( ) = p p W , •. . V x j H j • * •Iky V 0 j • • #Oy
Let ri' •••Jtyy) = jjii ---^(y) and Jj • • * 0$ **| • • •*V Jl •••Js • • •U-V
0P, •••PrY, = fit " A j J , ^en by substituting CX( . * #a3 oi . • *0 al ». •ai Of # • »0y w ^
jji, .. .irxa, .. .m^ ) _ p p • • • P j ^ x ) p puTf/ ***}y(x)
• • • $$ i •• «JQy 3 CC| • * •OCjj V 6 ( • • #§y
= P P P^P^O^' *** (pYi * * *Yk(x )
V v * r a ...aj6, . • .6i/
Therefore the outer product of two tensors is a tensor that
is contravariant of rank r+u and covariant of rank s+v.
TJhenever the notation P_ and P r can be used for the product
of the partial derivatives in the covariant or contravariant
transformation without ambiguity they will be used.
12
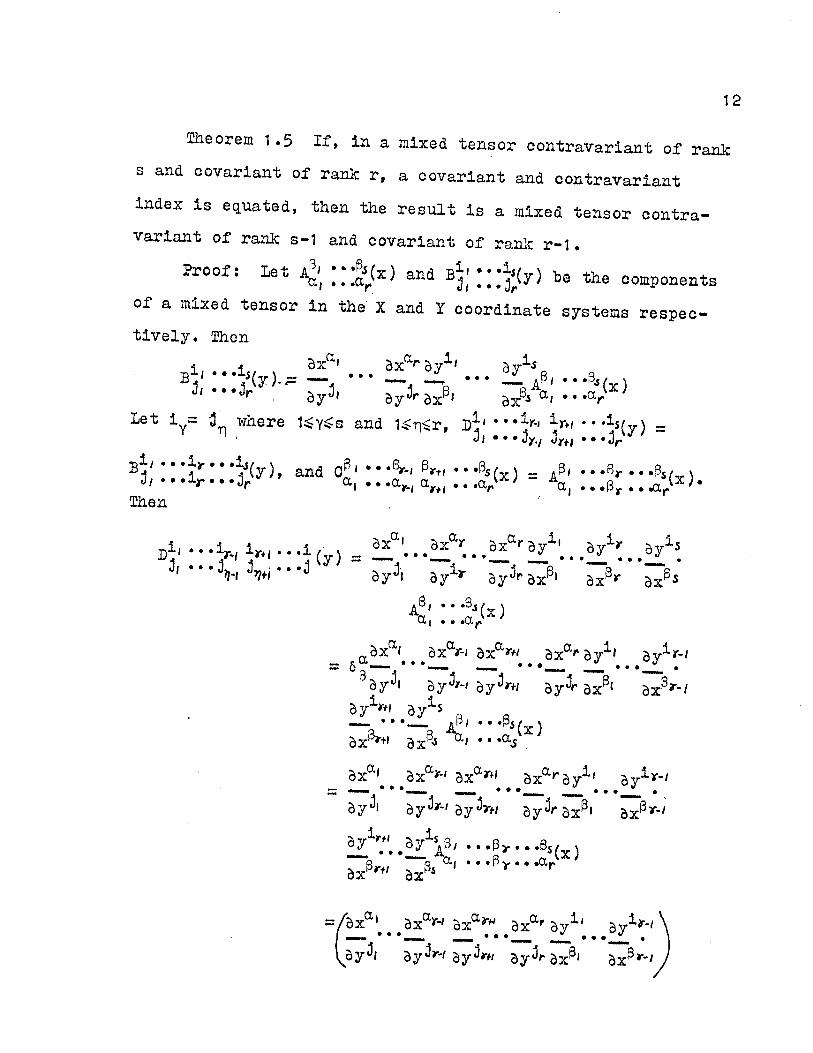
Theorem 1.5 If, in a mixed tensor contravariant of rank
s and covariant of rank r, a covariant and contravariant
index is equated, then the result is a mixed tensor contra-
variant of rank s-1 and covariant of rank r-1.
Proof: Let ;; Afr) and — f a ) b, the components
of a mixed tensor in the X and I coordinate systems respec-
tively. Then
1 * Bxa' bx^by1' by1* B^' — ••• — JL ••• -I a3I ...0,/-) ' * * • r By^r Sx ' ax8* a' '' ,ar
Let i = 3 where 1^y^s and Kri^r, D:' ^ '"ls(y) = df • • • Jy./ • • •3r
Bl, ^ „S, ...9,., |3„, ...g o, 3, • • .lr.. .jr ,a, .. ,ay.( aw| .. .ct/
x' a. .. .0r .. ,aJx '•
Then
Di,.. .i,., ir„ • • -i (y) = na'.. .af:. . ^ n 1 : . M 1 : . V s .
1 1-1 V'i" dy3l ay1* 8y^ Sx5j
6 Bxa< bxar-i 3xa»' Bx^By1' By3"*-'
— '•••—. -Jl •••.JL. • By i Byk' By *w By " Bx0( bx®*-l
by1*! by1* R „ • • • .P| • « 'Pi/yN
5x |r+l Bx 5 a/ • • ,a5
Bxa' Bxajr-' bxa™ bx^by1' by1*-' »mmm * # - • • • .. • • • •
By i Byk-' By^w By * 3^1 ax®*"-'
V. A ' * * ,^5r * * * s(x)
Bx^' Bx^a'
r3xa,# # # Bxa*-' Bxa^ #Bx
ar By1' By1*"'
by^i by^r-i 3y«5f« By«k Bx0' ax0*"-'
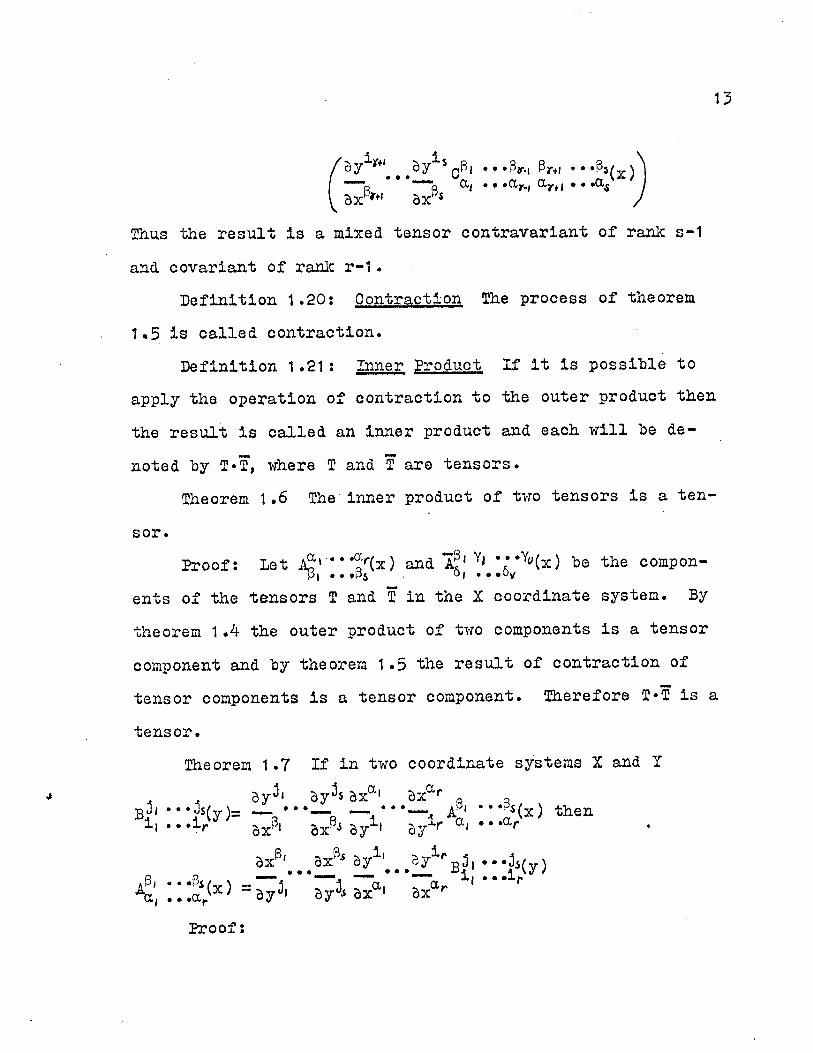
13
~"~o * * a/ " * *ar~i art) • • * ai
3xP*' dXP*
Thus the result is a mixed tensor contravariant of rank s-1
and covariant of ranlc r-1. •
Definition 1.20: Contraction The process of theorem
1.5 is called contraction.
Definition 1.21 : Inner Product If it is possible to
apply the operation of contraction to the outer product then
the result is called an inner product and each will "be de-
noted by T«l", where T and T are tensors.
Theorem 1.6 The' inner product of two tensors is a ten-
sor. Proof: Let i?» * * '^(x) and S 1 Y' \,,Yy(x) be the compon-
Pi • • , 01 • • •Oy
ents of the tensors T and T in the X coordinate system. By
theorem 1.4 the outer product of two components is a tensor
component and by theorem 1.5 the result of contraction of
tensor components is a tensor component. Therefore T«T is a
tensor. Theorem 1.7 If in two coordinate systems X and I
Bi" a, •••3i(y)= — _ • - " — , * - AS'. :: •!&*> Sy^s 3xa' dxar
ii . * »i»« -n,,P| Cti • • *0,f •I • * Sx 1 SX'J 3yX| Sy r
T> 3 I • • . .i
3xP' 3xPi dy1' SyirBd,
• •• , • • » -WJ| A \J 4
Aa, =:dy^« By^ Sxa' Sxar
Proof:
14
Prom the hypothesis,
3x3' 3:xPs dyi( 5yir 1 ^ — • • • • — • 3(1 ' " h y ) =
5y i By-s dx 1 5x r 1 * * * r
bx^ bx®s ay3-' dyirdy3' ay'3* 3xa' Sxtt|r g B
By i 5y^Sxa' Sxaf SxP| dx3* By1' Syi|r a' " M r
By rearranging and using Lemma 1.2 it follows that
d2c"'» • • Sx s Sy . .dy r j ^ o g g o «• .Bt/ \ — — — — b|/ • * * Js(y)= 6p' 6^. . .6pS A ' „5(x) ay3i ayibxa' 3xar 1i-,,ir p-> a| " M r
= £• Li i 09 »U* f
Theorem 1.8 Let ,AY(x) and B^Cy) be the components in
the X and Y coordinate systems respectively of a tensor I.
Also let A3' ***05(x) "be a set of functions in the X coordinate 01 j • • •Ct f
system. Let O1^' #"£j|4(y) "be a set of functions in the Y co-
ordinate system so that AY(X)A3' *'j^(x) and C^1 *#^s(y) are v CX| • • •U,y -L/ • • • JL |f«
the components in the X and Y coordinate systems respectively
of a tensor I1 • If Bk(y) 0, let B ' ' ^ (y) = C^'^l'^Cy)/ Bk(y), no summation on k. If B^(y) = 0, let B?i *" *2s(y) = Aa " a^x^* T h e n ' " " a ^
i, .. .irvjr
Sx3, ax3ff 3yi, ayir a, .. a, .. .ar
and Bj' * *#Jj(y) are components in the X and Y coordinate X | • • #Xf*
systems respectively of a tensor T. Proof: If B^Cy) i- 0 then .
15
ay*5' ay^s axa' axap&y* - R •
— b ' " — f i — i ' " — a . — v ±Y(*>?' , #*a ( x )
B?i •*,^(y) = 5 x 5 y Sylr5xY a' ' * r
i, .. .ir ' s lc
~ A Y < X > axY
_< < &y3' sy^s*®' sxa' „ Thus, B,3' • • • k y ) = —=*•'—» —1*"—i V • " ? ( * ) • If for
ii .. «ir ^xp, ^xpj By ' by r '
some lc, B^(y) = 0 then as given B^' ***^(y) Is the same as •L| t • *JLp
the equation immediately above. In either of the above cases
by theorem 11.7 ax9' hyp* ay1' ayir
o H ...H 1L •••-! f3i " I ' M = * a . a,Bi, ...i,K> Att, !I!ar
(x) = ay3' ay3*axa« a x ^ 1 ' •* , i^
Therefore "a?1 ***?s(x) and Bj?' * * *h(j) are components of a Ct j • • •QLf* i| • • •ip
tensor.
Corollary 1.8-1 By a similiar proof it can be shown
that theorem 1.8 is also valid when the components of a co-
variant tensor of rank one is used in place of the components
of a contravariant tensor of rank one.
Definition 1.23: Scalar A scalar is a tensor of zero
rank.
Theorem 1.9 If A^(x) are the components of a mixed ten-A
sor then A^(x) is a scalar invariant. 4
Proof: Since Alj(x) are the components of a mixed tensor
in the X coordinate system, the components in the Y coordi-
nate system will be given by
Am- -^ ( x ) J ayJ axp

16
, ax ay1
Let a = 3 so that Bt(y) = — , — A (x). By theorem 1.7, D dyJ axa a
5yJ 3xa , rr 1 1 ^ ( x ) = — a — ^ B^(y) and by lemma 1.2 = 6^B^(y).
Bx By*
Summing on I and 3 yields that 6*B^(y) = b| (yJ+BgCyJ+.-.+B^Cy).
Therefore A^'(x) = B^(y) and A^(x) is a scalar invariant.
Theorem 1.10 If X and I are admissible coordinate sys-
tems such that &|(x) is a set of functions in X and &^(y) is
a set of functions in X then 6 £(x) and 5^(y) are the compon-
ents of a tensor that is covariant and contravariant of rank
one.
Proof: Let x* = x3" (y1 ,y2,... fjr31) be a permissible
transformation. Then by definition 1.16,
3xa + dxa
+ 3X1 + ax2 t 3xn
t
— i 6 c c ^ = — i 6a ^ — i 61 + ~"~i 62 + * " + — i 6n ay1 ay ay ay ay1
axa t ax1 ax2 ax11
Khcn % zz 1,2, • • •, n "fctiGix ***"*» 6 s t • • • > rospoc*" S xa ay1 ag ay1 ay1 ay1
tively. Therefore — 1 6^ = . Now in the Y coordinate ay1 a ay1
system
, , ay3 ax3 ay3 axa p ay^ axa
p . 6Y (y ) = 6? = — 0 — 3 ^ = — o — i = — B — ± 61 (x) 1 • i ax0 ay1 axp ay1 a ax0 ay1 a
Thus 6i®(x) and 6^ (y) are the components of a tensor. 1 cc
Theorem 1.11 If ^ y ( x ) and B^t(y) are components of a
tensor T, and if Aa3(x) and Bi;^(y) are sets of functions so
that Aa0(x)i^y(x) = 6* and B1 3 (y)B^(y) = 6*, then Aa®(x)
and B1^(y) are the components of a tensor covariant of rank

17
two.
Proof: Let TY(x) and T^y) be the components of an
arbitrary non-zero tensor V. By theorem 1.6, ^y(x)Ty(x) =
Sg(x) and Sg(x) are tensor components. Then since
Aai? (x)A^y (x) = 6® it follows that IY(x)6^ = Aag (x)!^ (x)TY (x)
or
0?(x) = Aa3(x)Apy(x)TY(x) = Aa0(x)Sg(x)
Similarly,
T^yJ&J = B^tyjB^ly^Cy)
f^y) = b1^ Cy)s^ (y)
Thus since the products Aa^(x)Sg(x) and B^(y)Sj(y) are com-
ponents of a tensor, by corollary 1.8-1 it follows that
Aa^(x) and B^(y) are the components of a tensor that is
contravariant of rank two.
Definition 1.24: Reciprocal Tensors If T and T are
tensors so that If A1J(x) and A^tx) are components of I and
T respectively and A ^ (x)A^ (x) = 6^ tlien T and T are recip-
rocal tensors.
Definition 1.25: Symmetric Tensor When an interchange
of two contravariant (or covariant) indices in the components
of a tensor does not alter the value of the components then
the tensor is said to be symmetric with respect to those two
indices.
Definition 1.26: Skew-Symmetric Tensor When an inter-
change of two contravariant (or covariant) Indices in the
18
components of a tensor merely changes the sign of the com- .
ponents then the tensor is said to be skew-symmetric with
respect to those two indices.
Theorem 1.12 If the components of a tensor are symmetric
with respect to two indices in one coordinate system then they
are symmetric in all other coordinate systems.
Proof: Let Ai'1 ***i®s(x) be the components of a tensor A
in the X coordinate system so that these components are sym-
metrical with respect to two indices. Without loss in
generality assume these two indices are ^ and Then
aJi = AjM' V'^Cx) or AjMa • • ) - a-Mi •••^(x)=0. lj • • • X p JL | • • • JL X • X fr «*- / • • • X
By theorem 1.2 this difference is the component of a zero
tensor in the X coordinate system. If ^*!*^(y) and Xj • • • X
b3j 3, are the components of A in the I coordinate sys-X I • • • X yt tem then by theorem 1.1 it follows that
b1 ^*;*3s(y) - b W *;*^(y) = 0 Xj«««Xy» X | • • • X|»
BjJ/ •;,i(y) = B?a^ \"^(y) X | • • • Xp% X | • • • Xy» I
Corollai y 1.12-1 If the components of a tensor are skew-
symmetric with respect to two indices in one coordinate system
then they are skew-symmetric in all other coordinate systems.
Proof: The proof is similiar with the proof of theorem
1.12 when skew-symmetry is used instead of symmetry.
Theorem 1.13 If A^Cx) and 3 ^ (y) are sets of symmetric
functions so that if R^x) and Sa(y) are the components of an
arbitrary tensor then A ^ (x = Ba3 ^ ^ ^ ^ ^

19
then A^Cx) and Ba^(y) are the components of a covariant
tensor of rank two.
Proof: Since (x)Ri(x)R^ (x) = Ba^ (y )Sa (y )S (y) and
i * Zx ,
R (x) = — S (y) It follows by substituting for R (x) that
ax1 bx}
Ba(3 (y)Sa(y)SS (y) = ~ a 3 Sa (y)SP (yjA^ (x)
dx " Sx^ [Ba3(y> " ~ a ^ Ai3(x)]S
a(y)S9 (y) = 0
Let Ca^(y) equal the term enclosed in the above set of
brackets. Then (yjs" (y )Se (y) = 0. Summing on a and f) and
collecting terms yields
0,, (y)Cs' (y)]2+022(y)[S2(y)]2+...+0ml(y)[S
11(y)]2+
C 0aB ( y ) + ° B a( y ) ] s a ( y ) S 0 ( y ) = 0
where a / 3 and a,3 = l,2,...,n. Since this sum must be
zero for any tensor T it must be that the coefficients are
zero. Thus * dxA SxJ
Oa0(y) + C8a(y) = CBae(y) - - ^ A^tx)] +
1 i dxJ 5x
[ V y ) " ^ - a V x ) ] = °
3x " 3x^ ' CBa3(y) + Bga(y)3 = ~ a ^ [ A ^ x ) + A^Cx)]
But A^Cx) and Bap(y) are symmetric functions so that
bx1 Bx3
Baf3(y) = — — p Ai;j(x). Therefore A^Cx) and Bag(y) are By 3y
components of a covariant tensor of rank two.
20
Theorem 1.14 Let an& (y) b e '®ie components of
a tensor so that the determinant of the g^teJ's a-*1*3-
determinant of the hag(y)'s, denoted by g(x) and h(y) respec-
tively, are not zero. Also let gi^(x) "be the cofactor of
g^(x) divided by g(x). Then g3" (x)g^(x) = 6^ and g^(x)
are the components of a tensor whose components in the I co-
ordinate system are ha^(y), where ha^(y) is the cofactor of
hga(y) divided by h(y).
Proof: Summing on 3 gives that
g1^ (x)g^lc(x) = gi1 (x)g1lc(x) + ...+ g^CxJg^Cx)
cofactor g,,(x) cofactor g.(x) — J +...+ g^Cx)
g(x) g(x)
If k 4 i then g1^ (x)g^(x) = l/g(x)[0] = 0. If i = lc then
g1^ (x)g^(x) = l/g(x)[g(x)] = 1. Therefore g1^ (x)gjk(x) = 6£.
By a similar argument it follows that ha^(y)hgY(y) = 6^ if
ha^(y) is as defined in the hypothesis. Then by theorem 1.11
it follows that g^(x) and ha|3 (y) are tensor components.
Definition 1.27: Fundamental Tensors The two tensors
of theorem 1.14 with components in the X coordinate system of
g^fx) and gj^(x) will ke called fundamental tensors and
g^(x) will be called the conjugate of g^(x).
Theorem 1.15 Let g±j(x) and \ 0 ( y ) be the components
of a symmetric tensor so that the determinants of the Sjy(x)'s
and hag(y)'s, denoted by g(x) and h(y) respectively, are not
zero. Also let g1^ (x) be the cofactor of g-^fe) divided by
21
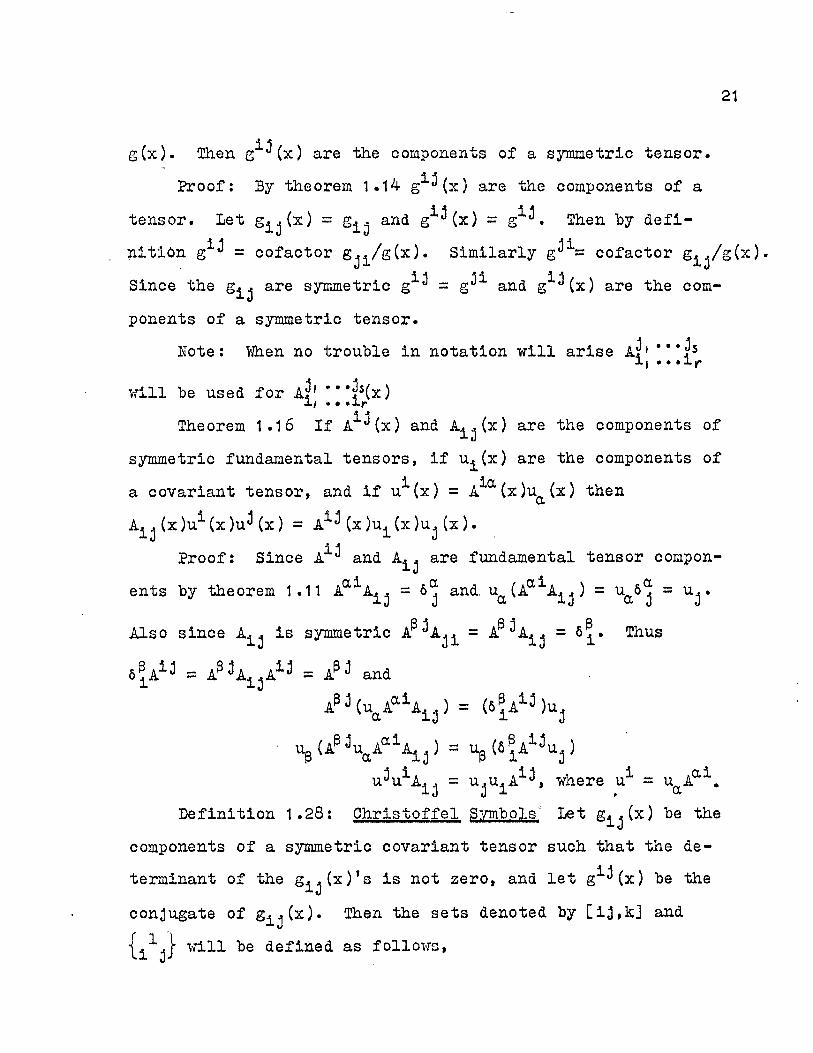
g(x). Then g^(x) are the components of a symmetric tensor.
Proof: By theorem 1.14 g^(x) are the components of a
tensor. Let (x) = g ^ and g^(x) = g"^. Then by defi-
nition g1^ = cofactor g^/g(x). Similarly g^= cofactor g^^/g(x).
Since the g ^ are symmetric g"^ = g ^ and g^(x) are the com-
ponents of a symmetric tensor.
Note: When no trouble in notation will arise A*' *** 5 X | • • • J.
will be used for A*' ***;js(x) x/ # • «Xf
Theorem 1.16 If A^Cx) and Ai;j(x) are the components of
symmetric fundamental tensors, if u^(x) are the components of i i n
a covariant tensor, and if u (x) = A (x)ua(x) then
A ^ (x)u^(x )u (x) = A ^ (x )u^ (x )u.. (x).
Proof: Since A"^ and A^j are fundamental tensor compon-
ents by theorem 1.11 AaiAi;5 = 6^ and. u^CA®1^) = u ^ = u^.
Also since A ^ is symmetric A ^ A ^ = A ^ A ^ = Thus
6^Ai^ = A^Ai;JAi;I = A0^ and
AP 3 (uaAaiAi;j) = (6^A
i3 )u3
• y A P V a l V s VtiAllV u^u^A^ = u^u.jA^, where u1 = uaA
ai.
Definition 1.28: Ohrlstoffel Symbols" Let S-jj(x) be 1^Le
components of a symmetric covariant tensor such that the de-
terminant of the g_y(x)'s is not zero, and let g^(x) be the
conjugate of gjj(x). Then the sets denoted by [i;J»k] and
{i^jl defined as follows,
22
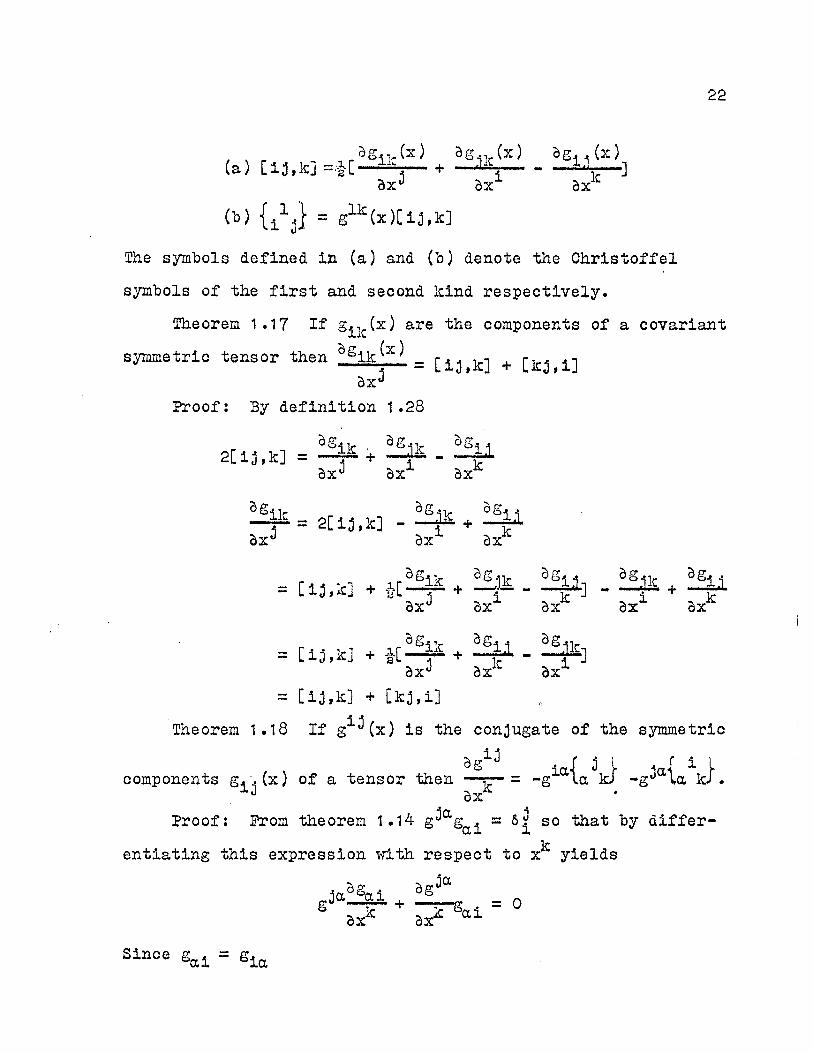
/ v r Sg,, (X) Bg. ,(x) (a) [id,k]=>|[— LL1—]
BxJ ax1 5xIC
0>) { A } = glk(x)[i^,lc] Z"
The symbols defined In (a) and (b) denote the Ohrlstoffel
symbols of the first and second kind respectively.
Theorem 1.17 If g^(x) are the components of a covariant
symmetric tensor then = +
axD
Proof: By definition 1.28
&S11r . ag,, ag., 2[ij,k] = — ^
3xJ Sxx ax*
SgiT . aS1lr Sg, 1 — ~ = 2[i3,k] f2-+ — e 1
SxJ ax 3x
3slk Bgik 5Si 4 ag1lr 5g, , = [ij,lc] + i-[—p- + —
3xJ ax ax ax ax
Bgj, agj j agji = Ci3,kJ + ft—-P- + - P - ft
axJ ax* ax
= Cij.ic] + CJcj.i]
Theorem 1.18 If g^(x) is the conjugate of the symmetric
components g^te) of a tensor then —r— = -g"*"a{a ki -g^aia lei*. . J axc
Proof: Prom theorem 1.14 g^agai = so that by differ-
entiating this expression with respect to x yields
la^ai 8 S ? " + ^ a i = 0
Since g s l = gia

23
_ 1a Ssia
W 5s^a - - -1P-3® 5 g l a ® % a " ' k"' *~ a k " S ^ ]c l a bx dx Sx
Then by theorem 1.17
5P-0;5 JL_ = _ _ _ = -g
lB Sialic,a] + [ale,i] )
5 X S X = -glp (g3a[Ik,a]) - g^a(g1B[alc,i])
= - S ^ J k } -S3a{aSk)
By replacing the summation index in the first term with a and
replacing 3 with i in the second part of the above relation
nothing will be changed since the same operations are still
indicated. Thus
p r = - s ^ i c }
OX Theorem 1.19 If g.Jx) are the components in the X co-
' 1 1
ordinate system of a symmetric tensor T'and if y = y (x) is
a nonlinear permissible transformation of X into the I co-
ordinate system then the Ohristoffel symbol, of the first kind
is not a tensor. *
Proof: Let k^CyJ.be 'b^Le components of T in the Y co-
ordinate system. Then
Sxa 3xP
^ By3" 3y^ gaP
and taking the partial derivative of h ^ with respect to
24
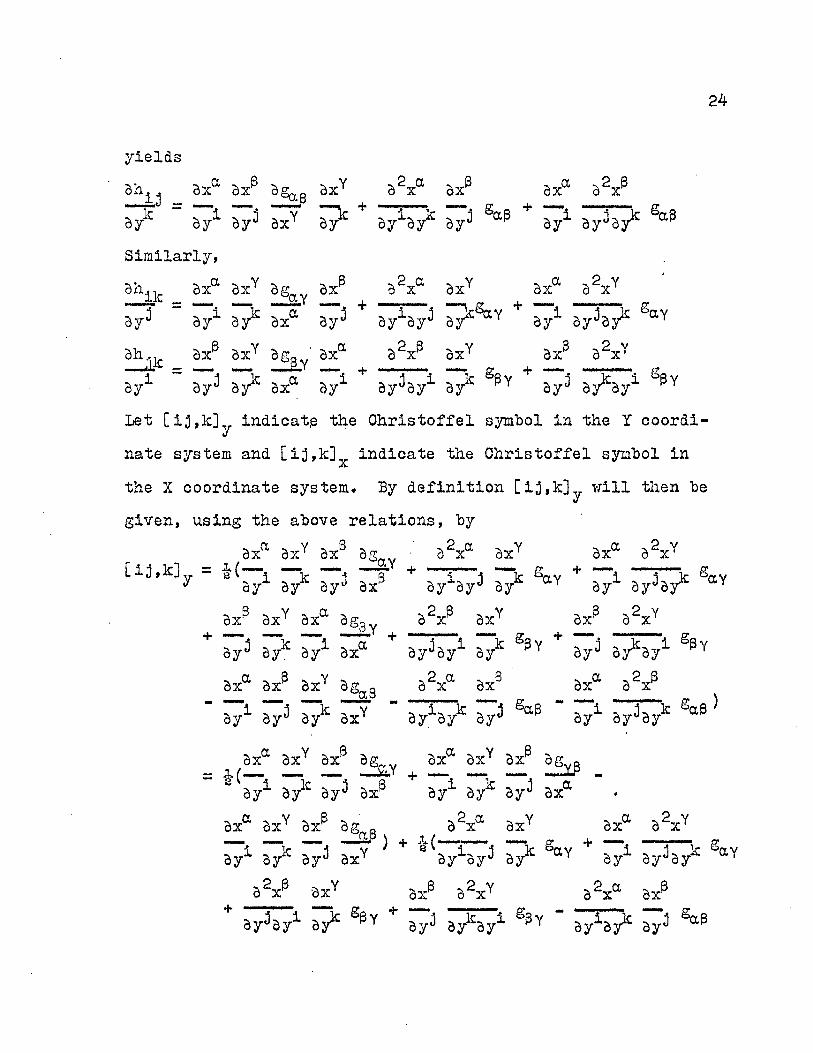
yields
ah^ axa 3x0 S^g 3xy a2xa bx® Sxa a2x0
Sylc ay1 ay"3 axY Sy^ ay^y* ay"5 S(Xp ay1 dy^dy*
Similarly,
ah,, Sxa SxY ag Sx0 a2xa SxY 3xa a2xY tmmmmSm •— t n m w * mmmmm mmmmmmX mmmmm «£• mmmmmmrnmmmm mm*mt £>» *|» mmmmm mmmmmrnmmmmm
By*3 ay1 a/1 axa ay3 ay^y3 a/^*7 ay1 ay^ayk
ah;Uc axp axY ag8v axa a2x0 axY ax3 a2xY
By 1 ay-3 a/1 axa ay1 ay^ay1 ay^ § 0 Y ay3 ay^ay1 S g Y
Let [i3,3c]y. indicate the Ghristoffel symbol in the I coordi-
nate system and [i ,1c] indicate the Ohristoffel symbol in >A>
the X coordinate system. By definition [i ,lc] will then be «y
given, using the above relations, by
axa axY ax3 agay a2xa axY axa a2xY
Cid»lc]y a ^ y i Syls: Syd ax3 ay1ay^ ayk S(XY ay1 byhy^ SccY
ax® axY axa ag9Y a2x^ axY ax0 a2xY
ay15 ay^ ay1 axa ay^ay1 ayk S0Y ay^ ay^ay1 S g Y
axa ax0 axY ag^ a2xa ax3 axa a2x3
ay1 ay3 ay12 axY ay -ay* ay3 ga0 ay1 ay3ayk Sa0^
axa axY ax0 ag axa axY ax0 ag a = 4(P- 7? 7? J + ^ P S* ' • axa axY ax3 aga3 a2xa axY axa a2xY
ay1 ay^ ay3 axY ^ + S^ayisyi3 ayk SaY * ay1 ay^ayk °aY
a2xp axY ax@ a2xY a2xa axp
ay^ay1 ay^ S 0 Y ay3 a^ay1 S g Y ayiayk ay3 Sap

25
5za bS7?
ay1 ay^ay^ ^ ^
!2?2i Y i f r H ! % Y + ^ Y . i S t f n +
ay1 Sy^ Sy*3 * ax0 axa axY
a2xa axY
a y V a / b a Y
axa axY ax0 a2xa axY
- — _ _ Cap,Y3x + — 7 — 1 — v g„v
ay ay ay"3 x ayHy 0 ay* a Y
Therefore [ij,k] is not a tensor.
Theorem 1.20 If g ^ C x ) and h ^ C y ) are the components in
the X and Y coordinate systems respectively of a symmetric
tensor T and if y " = y^(x) is a nonlinear permissible trans-
formation of X into Y then the Christoffel symbol of the sec-
ond kind is not a tensor.
Proof: Let denote the Ohristoffel symbol of the
second kind in the Y coordinate system and
Christoffel symbol in the X coordinate system. Since
a n d ki^Cy) are the components of a symmetric tensor, then by
theorem 1.19
axa a 2x a s xy •
C i 3 » k] — 4 V '"•< I- » Y ] y- < 4 V Sff v 7 ay ay^ ay*3 x ayiayi3 ay* a Y
-lkr lk ^ 5 x Y
h^CiJ.k] = h 1 ] £(- - - Ca3,Y]x + * ), ay1 ayc ayJ x ay ay3 ay a Y
T 1y
where h is the conjugate of h ^ . By theorem 1.11 h l k are
tensor components so that

26
1 ic ^ 2 1 g5v
Sx ax
where g6 Y i s the conjugate of g 6 y . Therefore h l i c [ i 3 , k ] y =
{ i 13 } y a a i >
, ay 1 a / 6 axa axY ^ s V a*Y
{ j j L = ~~~c ~~v g — k •"""* Ccc0,v] + —r—•. , ®av *4 S x
6 3 x v ay a / 1 ay3 ay ay3 a j r
ay 1 ay k axY
ax6 axY ay^
ay 1 axa axe
ax6 By1 ay3
_ S y l axa ax0
ax6 ay 1 ay3
s , Y Cae,Y] , +
3 2 x a by 1 ay^ 3xY 6 y
i ^ V 5 ? ^ Y S ? ® ®aY
a x ay 6
( a M + ~ 6
I
x .-8y l3y3 3x6 a
, 1 ^ + i 1 i ay ayJ ax
Thus { j ^ } i s 3ao"t a "tensor.
Theorem 1.21 I f A, , i s def ined as X9 J
SA j (x ) f a L / \
• A i - 3 = £ 3 ^ M C x ) >
where A^Cx) are the components of a tensor A i n the X coordi-
nate system, then A^ ^ are the components of a tenso r .
P roo f : Let B^(y) be the components of A i n the Y co-
ord ina te system. Then ax
B - —. 1 ay 1 a

27
Taking the partial derivative of B± vrith respect to y^ yields
5B, dxa Sx0 a2xa
rnmmmJmm MM* mmmmm mmmmWWWMW «|* mmmmmmmmmm*
By^ ay1 axP 3y^ ay^y^ a
Prom theorem 1.20 it follows that
3 x 6 r 1 | _ Sx6 By1 Bxa 3x0 r 5 "i S2x6 ay1 ax6
ta J J y " Z i T 3 3 i 7T.1 la ei": ay1 U J ; y = ay1 ax6 ay1 ay* t a ^ + a y V ax6 ay1
a2x6 ax6 r ! i 5xa ax0 , 6
ay^y^ ay1 * y ay1 ay* 0
^2 a a x
Thus by substituting for 11 • .1 % ay ayJ
aB ^ _ axa ax0 aAa axa , 1 , axY ax0 , a .
ay* ay1 ay* axg aay 1 * y ^ay3* ay^ Y 0
ax aBi J . _ -S
Ihen noting that J a — x = B x and B ± > } = — 3 - ^ {j1.,} ay ,J ay
S Bi J 1 I 9x<X d x P d Aa S x Y 3 x 0 r a I
ay3 1 ^ y ay1 ay* ax0 "^ay1 ay* " Y p x
- S-fct f V L ^ ^
^ ay3" ay^ax 0 \ la pj" Sjri a yj Aa,p
since the changes in suffixes still indicate the same
operations. Therefore A^ ^ are tensor components.
Definition 1.29: Oovariant Derivative If a|' " * *^5(x) L L' JLj • • «lLp
are the conponents of a tensor A in the X coordinate system
and if g ^ ( x ) are the components of a fundamental tensor in X
then the covariant x 1 derivative of A*' denoted by X j • •

28
jJi-'i', (x), is JLt«*«JLy*yJU jt .i
3 Ai " i t x ) = a x r - (i"J. -
{ 4 } - ••• - {i°J *2; :::£*> +
• W • - •
W
Theorem 1.22 If Aa^ and B"^ are the components of a ten-
sor A in the X and I coordinate system respectively and if
Ha£i
3x AaB = — + ( M A69 + ( 3 1 A< , Y ...Y U YJXa 16 yJx
Bi3 - — + f 1 \ £3 + S i I *,1 a yl
+ Ik l/y Ik liy
then Aa^ and B3*-, are the components of a tensor. > Y f -k
Proof: Since B3" are the components of A in I then
Bij _ El1 ^ &
' zJ ^ 11 1
Taking the derivative of B J with respect to y yields
SBi3 S yi 5y3 3Aa3 axY+ a2yi 5xY ^
Sy1 dxa dxP 9xy. Sy1 axa5xY ay1 Sx^
By1 J * V SxY a 0
dxa dxgdxY ay1
As shown in theorem 1.21
a V _ ^ 1 s 1 _ r 1 1 axaaxp ax6 1 3 x dxa axe *,i 3 7

29
Then on substitution,
3^ ivY N.ttP > 1 ! £ = i r iT" r ! T + , ! £ ( . ) a B
Sy bxa SxB ay1 axV 5xa U yJx 5xa Sxy Ik l/y' iyX ~ 8 A
+ ? 4 { 8 J. . 22" J 1 } j!!1 !iY Aae . axB \f> yJx axB 3 x y to l i y ^ a 3yi
A
By using different indices to indicate summation, the tensor
relation between B ^ and Aap, and lemma 1.2, it follows that
SB1^ By1 dyj dxY 3Aa3 , , •>
s 7 = sla ^ ( + {aaY}x
A<1 S ' V y I x ^ > - l^y^3
h,im •y
aB1^ ^3 „,,Y --r - f 1 I + / n b1* - — s r S x ,-M 3y l k ^ " 3xa & a.Y
B 4 = 22* !iV Aae ' dxa Bx^ by1 ,Y
Therefore A ^ are components in the X coordinate system. A ^
represents the covariant x1 derivative of the contravariant
tensor A"^.
Corollary 1.22-1 If Aag and B ^ are the components of a
tensor A in the X and Y coordinate system respectively and if
SA
^P,Y = " (a y}xA63 " {0%}* Aa6
3B. . . -
*13,1 = ^ - { i V y - { 3\}y Bi*
then Aag^Y and B ^ ^ are the components of a tensor.

30
Proof; The proof is similar to that of theorem 1.22
with the result that A ^ ^ is a covariant tensor component of
rank three.
Corollary 1.22-2 If A^g and B ^ are the components of a
tensor A in the X and. Y coordinate system respectively and if
a.y6
$ . C = ^ 8 - W . < - W x < +
W x $ + V J x $ a Bkm
iJ. f n I Jem / n 1 ^km . Bij,l - S yl li liy \ ) - {j liy in +
f lc 1 rsHni , f m 1 -p.3oi In l/y Bij + in l/y \ j
then ^^ and 3^? ^ are the components of a tensor-
Proof: The proof is very similar to the proof of theorem
1.22, the only difference being the length of the terms in-
volved.
Theorem 1.23 If A^^ and A ^ are tensor components then
(Aij + A ^ ) ^ = A i ^ 1 + A i ^ 1 .
Proof: Let A ^ and A^^ be the components of the tensors
in the X coordinate system. By corollary 1.22-1
IN* ^ »4 Jt ^ JLj» jl - _
^ 3 , 1 + A U , 1 = + ^ " ^ 3 + M i l)*--
'Aik + f u c K / l l x
bince A ^ and A^^ are tensor components by theorem 1.2
(Aij + A ^ ) are tensor components covariant of rank two. Thus
by corollary 1.22-1
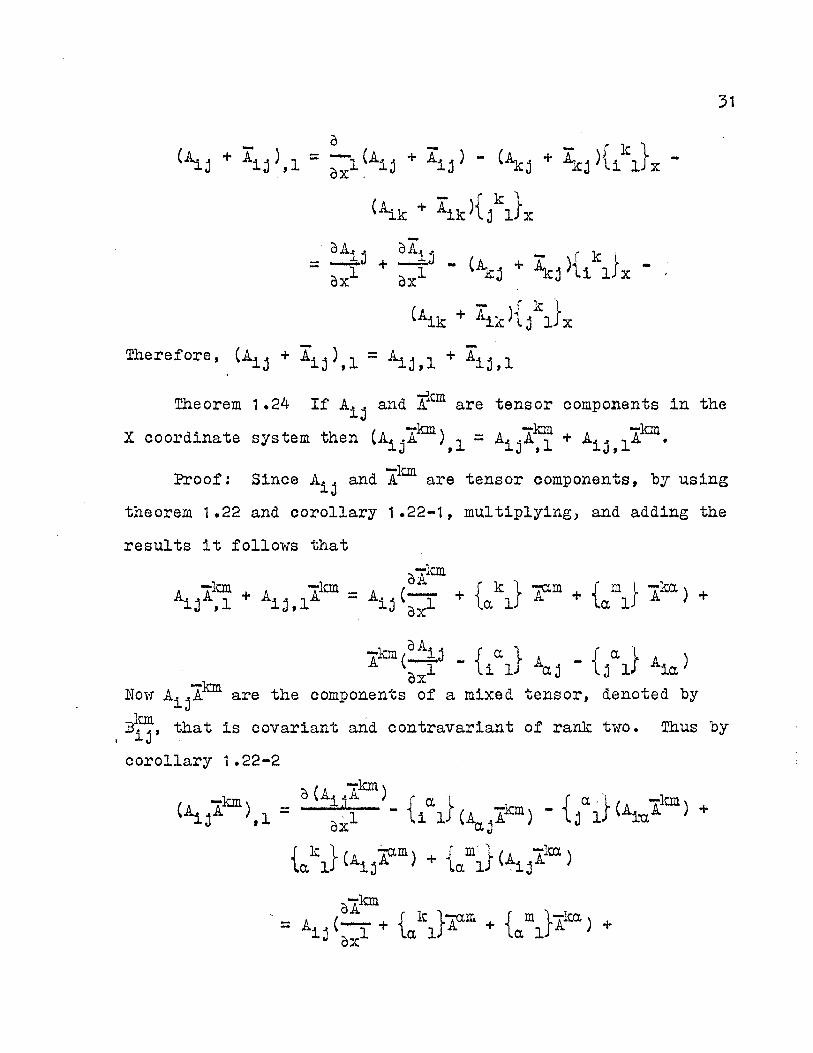
31
a
dx"*". (A^ + ~
+ ^ij^ " ^ 3 * "
W k + ^ikK^llx
a A j j j S A j j ^ r v •
" a ? + a ? " + " '
* fucKj^lIx
Therefore, U ±^ + = Aij,i + Ai;),l
Theorem 1.24 If A ^ and A*031 are tensor components in the
X coordinate system then (A^A1™)^ =: A^ifj + A ^ ^A1011.
Proof: Since A ^ and A are tensor components, by using
theorem 1.22 and corollary 1.22-1, multiplying, and adding the
results it follows that
al1™
h f t * = V - r + W • ( A l * t a > • 3r
3 A,
ax jtoiflhj _ i" a 1 A - i a } A ) A \„1 li 1J Aaj 13 1J ia'
Now A^l?011 are the components of a mixed tensor, denoted by
B^, that is covariant and contravariant of rank two. Thus by
corollary 1.22-2
(A A1™) - 1 ^ 5 — L I a -icmx - { a W A A1™) + tAiJA ,1 dxl ti 1J (A^A ) 13 1J U±a A *
la^l} + {ami} 1^°" ^
s~km
= V i a + 1 A } ^ * { +

32
Therefore, U 1^a t L) t l =
A ± ^ l + h ^ l ^ '
Theorem 1.25 If an<i SX^(x) are the components in
the X coordinate system of fundamental tensors then g ^ ^ = 0
and = 0. I J-Proof: By corollary 1.22-1
si3,l = H P " (iai}sa3 " {^ai}sia
.a
By theorem 1.17 — ^ = [il»3] + Ul»i]> and by definition
{i^j} = so that
%c3"{i 3} = slcps " 6gti^»a] - [ij»3]
Therefore
siJ,l = + ^ 1» i^ ~ {^il^ad " it J"Sia
= {iailsa^ + {^lKxi " {iai}ga3 " {/l}si<
Since gai = gia it then follows that = °*
By theorem 1.14 by theorem 1.24
= gi;5s3ic»i + = 6^,i
But g 1 3 ( 1 = 0 so that g^g 3 k = How .
6k,l = ^ + = ^ ^ = °
Hence S ^ g ^ = 0» From the definition of g3" it is required
that the determinant of the g^'s not be zero so that it must
be that g1^ = 0.

CHAPTER II
RIEMAM SPACES
Definition 2.1 : Simple Arc A simple arc is a set A of
points with respect to a vector space Vn such that
1) every point (x1,x2,...,xn) in A is given by x3" = f^t),
where f (t) are n functions that are continuous, have
a continuous first derivative, and a^t^b with a<b
2) if P is the point given by x^ = f^Ca) and P1 is the
i. i point given by x = f (b) then P is the first element
of A and P' is the last element of A and if a<t^<...<b
1 i then P precedes the point P represented by x = f (t^),
i i P1 precedes the point P2 represented by x = f (tg),
i i
..., and the point Pn represented by x = f (t^) pre-
cedes the point P1, and
3) If a«t,<t2sb then there is a positive integer iSn so
that f^t. ) 4 fi(t2)
It will be assumed that associated with each ordered pair
of points is a non-negative real number having the properties
1 ) if P is a point and Q is a point such that P = Q then
the number associated with P and Q is zero,
2) if P is not Q then there is a positive number associated
with CP,Q) and this same positive number is also asso-
ciated with (Q,P), and
33

34
3) if P,Q, and R are points then the number associated
with P and Q plus the number associated with Q and R
is greater than or equal to the number associated
with P and R.
Definition 2.2: Distance Between Two Points The number
associated with a pair of points will be called the distance
between the two points.
Definition 2.3: Arc Length Let A be the arc given by
i 1 x = f (t) with a^t^b and a<b, let P be an element of A given
i i 1 JL by x = f (c), let Q be an element of A given by x = f (d),
where c<d, and let D be any subdivision of the interval [c,d]
of the form c = tQ<ti<t2<.. .<tn = d. For each t^, i = 0,1,...,n,
a point P^ in A is obtained. Let. d^ be the distance between
the points P^ and P ^ and let S =Xd^. For each subdivision
D a S is obtained. Let B be the set of all such S. If B has
an upper bound then the arc length between P and Q along A will
be the least upper bound of B. If B has no least upper bound
then the arc length will be infinite. All arcs considered in
this paper will have a finite length.
Definition 2.4: Ourve A curve in a vector space Vn is
an arc.
Definition 2 .5 : Riemann Space A set of points R^ is a
Riemann space if and only if there is a set S of coordinate
systems for Rn, a covariant tensor T of rank: two, and a class
H of contravariant tensors of rank one such that
35
1) if R is in H then R and T have components in each
element of S
2) if X is in S and g.y(x) are the components of T in X
then g-j^Cx) = the determinant of the Sj^(x)
i
is not zero, and for any non-zero components R (x) of
a contravariant tensor in X g^(x)R^(x)R^£x)>0, and
3) if P and Q are two points of R^ with coordinates a
and b, P Q, and ds is the distance between P and Q
then there are in X tensor components H*(x) and H "(x)
of two tensors from H such that if ds is the distance
from P to Q then
(ds)2 = g ^ (a/H1 (a)H (a) = (bJH1 (bJH3 (b)
The tensor T will be called a metric tensor for R^.
Lemma 2.1 : If P and Q are two points in a Riemann space
Rn, X and Y are two coordinate systems for Rn such that g-j^fc)
and h ^ (y) are the components of a metric tensor in X and I 1 1
respectively, and R (x) and S (y) are tensor components in X
and Y respectively such that the distance ds between P and Q
in X is (ds)2 = g ^ (xjR^CxjR^ (x) and the distance ds' between
P and Q in Y is (ds1)2 = h ^ (y JS1 (y )S (y) then ds = ds'.
dxa 3x^ Proof: Since ^ ( y ) = — ± Sap(x) and
• dy Sy S (y) = — Ra(x) by substituting into the expression for (ds1)'
3xa it follows that
36
p 3xa ax0 Sy1 By3 fi (ds') = [—, — 1 &,8(x)][— R (x)][—X R3£x)]
dyx dyJ a p Sxa axp
Sxa By1 Sx® By3 B
- (— —* )(—1 ~ B ) SaB(x)R (x)R (x) by dxa SyJ dxp a p
= 6 a 6 3 Sap (x)Ra(x)RP (x)
= Sa8 (x)Ra(x)RP (x)
Therefore (ds )2 = (ds')2 and ds = ds1
Definition 2.6: Euclidean Space Let 6 ^ = 0 if i / j
or 6^^ = 1 if i = J and if (a1 ,a2, ..., a11) and (b1,b2,...,bn)
i i i
are the coordinates of two points let dx = b -a . If there
is a coordinate system X for a Riemann space Rn so that if
(a1 ,a2,... ,an) and (b1,b2,..., bn) are the coordinates in X of
two points then the distance ds between the two points is
given in X by (ds)2 = S^dx^dx^ "the*1 "the Riemann space is an
Euclidean space E .
Definition 2.71 Cartesian Coordinate System If Y is a
coordinate system for the Riemann space R^ in which the com-
ponents gj_j(y) of a metric tensor are constants then Y is a
Cartesian coordinate system.
(Theorem 2.1 The components S;y(x) a metric tensor
reduce to constants k^(y) i n some coordinate system T if and
only if the Chrlstoffel symbols of the second kind in the Y
coordinate system are zero.
• Proof: If the ^^(y) are constant in the Y coordinate
system, then

37
{ikj}y = = 4*kl A 1 * ^ 3 ) = ihkl(0) = 0.
' dyJ by by
Thus if the jCy) are constants in I then in this coordinate
system the Ohristoffel symbols of the second kind are zero.
Talcing the covariant derivative of h. . (y) with respect 1
to y gives that
= Ir3- {AIAJ " {j'IW But if the Ohristoffel symbols of the second kind are zero in
1; .1
the Y coordinate system then h. . , = ° i.1 _ ,, „ __ iO»l — r . By theorem 1.25
Ah h. . , = 0. Therefore i;5 _ A i +-u ^ j. A ij»l ~~r - 0 and the iu are constants. ay
Definition 2.8: Tensor Length Let A (x) he the com-
ponents in the X coordinate system of a tensor A in a Riemann
space Rn and let g-y(x) be the components in X of a metric
tensor for B^. Then the length L of A at x in X is given by 2 i 1
I» = Sj_jA AJ. Similarly for the components A^(x) in X of the
tensor I, the length L is given by L2 = gi^A1Aj, where g1^ is
the conjugate of g^.
Definition 2.9i Associated Tensor Let X be a coordinate
system for a Riemann space R^, g - (x) be the components in X
of a metric tensor for R^, and A^(x) be the components in X of
a tensor A. Then the components A^(x) of the tensor X, given i —»
by A^ = g^A , will be called the components of the tensor A associated with A. Similarly if A^(x) are the components in
X of a tensor A and if g^(x) are the conjugates of g^Cx)
then the components AiCx), where A^x) = g1^ (x)Aj (x), will be

38
called the components of the tensor associated with A.
Theorem 2.2 If L is the length of the contravariant
tensor A of ranlc one in the X coordinate system for a Riemann
space then L is the length of the tensor A associated with A
in X.
Proof: Let A be the components of A in the X coordinate
system and g ^ the components in X of a metric tensor. By
definition 2.8 the length of A at x is L2 = g^A^A^ and by
definition 2.9 the components of the tensor associated with A
in X are A^ = g^A^. gia are the conjugates of g^a then
= g i aS l / = = Aa
Therefore the substitution of the above into the expression
for the length of A in X yields
*2 = = Vp and L is also the length of the tensor associated with A.
Definition 2.10: Ooslne of the, An^le Between Two Tensors
1 1
Let A (x) and B (x) be the non-zero components of the tensors
A and B respectively in the X coordinate system for a Riemann
space R^ and let g^(x) be the components in X of a metric
tensor for The cosine of the angle 9 between A and B in X *
will be given by
g,, ix)A1ix)Bi (x) COS© = "•
[g^ (x)A1 (x)A^ Cx)]^
i i
Theorem 2.3 If A and B are the non-zero components of
the tensors A and B respectively in the X coordinate system

39
for a Riemann space R^ and if the cosine of the angle © be-
tween A and B in X is defined as in definition 2.10 then
|cos©| 1 .
Proof: Let g ^ be the components of a metric tensor for
i i in X. If for any real number a, aA + B / 0 then since i 1 i
gijC 0d>0 for any non-zero tensor components G
gi^aAX+ Bi)(aA3+ B3 )>0
gjy (a^AiA^+ 2aB^Ai+ BiB^ )>0
gi^AiA;5a2+ 2gi^A
iB'5a + gi^BiB^>0
The last expression above is a quadratic in a so that the
discriminant of this quadratic must be negative. If it is
not negative then there will be some value for which the
quadratic will be zero and thus not positive. Therefore
Since g,-A BJ>0,
teg^AV )2- 4 (gi;.AiAi3) Cgi BiB'3 )<0
gi^AiB^< CgijA^ )^(g1;JB
1B;3)«
and |cos0j<1.
i i If there is a real number a so that aA + B = 0 then
i 1 B = - aA . Upon substituting this in the formula for cos©,
-a COS© = - 'W = +1
[(-a)2]* " Therefore J cos ©I =£1.
Definition 2.11 : Hypersurface in a Riemann Space A
hypersurface in a Riemann space Rn is a set of points S such
that S is contained in R^ and S has the following properties
1) there is one coordinate system X for R^, an interval
40
1 2 a<u <b, an interval e<u <d such, that every point *1 P V J
(x ,x ,...,x ) in can be represented by the func-i l l p 1
tions x = x (u ,u ). The functions x will be real
valued, continuous along with its first partial de-
rivative, and reversible over the above intervals of
1 2 definition of the parameters u and u .
2) if H is a set of two dimensional coordinate systems
1 P
for S containing (u ,u ) then S is a Riemann space Eg*
It will be assumed that 1 = 1,2,3 for the hypersurfaces
throughout the rest of this paper. 1 2
Definition 2.12: u and u Curves of a Hypersurface Let S be a hypersurface as defined in definition 2.11. Let
1 1 ?
a<h<b and c<lc<d. The curve x = x (h,u ) will be called the
u^ curve with respect to h. The curve x"*" = x Cu'',]!) will be
called the u1 curve with respect to k.
Definition 2.13J Coordinate Curves of a Hypersurface
1 2
The u and u curves as defined in definition 2.12 will be
called coordinate curves for the hypersurface S with respect
to h and 3c.
Theorem 2 A If S is a hypersurface in the Euclidean
space E^ and X is the coordinate system in E^ so that the
distance ds between two points represented in X by a and b is
(ds)2 = S^dx^dx^ then there is a metric tensor with compo-
nents Bxa 3xa hi3 ( u ) = ~ 1 J 3u dUJ
41
so that the distance ds in X is equal to the distance ds1 for
the hypersurface coordinate system containing (u1,u2).
Proof: Let each point be represented in X by (x1,x2,x"^),
where x3" = x^u^u 2). Krom calculus, letting a = 1,2,
, ax3" dx = —• dua
3u
Since in X it was given that (ds )2 = 6^dx^dx^ for any two
points, by substituting for dx1 it follows that
o dx1 „ Sx^ dx1 dx3, „ Q
(ds) = 6 ± ( — du )(—6 du0 ) = — — duadu3
± z dua dup du dup
dxa dxa
Let hj. i (u) = — . —~. Prom lemma 2.1 it was shown that ds is XJ. dux duJ
invariant for any contravariant tensor from H. Therefore by
theorem 1.13 it follows that h^(u) are the components of a
covariant tensor of ranic two and thus are the components of a
metric tensor for S.
Theorem 2.5 If S is a hypersurface in the Euclidean
space Ej, if X is a coordinate system so that the distance
between two points represented by a and b in X is given by
2 i 1 (ds) = S^^dx dxJ, and h^(u) are the components of a metric
tensor for.S as defined in theorem 2.4 then the components of
1 2 i the unit tangents to the u and u curves are 1 dx and
i 1 respectively. 1 )asu
(h22 )* du
Proof: Let x1'= xl(u1,u2) be the representation of x1
in X. In Ej every point will be determined by an ordered

4-2
4 p 4 4 4 p triple of real numbers (x ,x ,x ). Since x = x (u ,u )
these ordered triples can "be written as I I P P I P ^ I P 1
Cx (u ,u ),x (u ,u ),x (u ,u )] and every point on the u 1 1 P 1 ^ 1
curve will be given by [x (u , c),x (u ,c ),x (u ,c )]. Denote 1 1 2 5 1
the points of the u curve by (r ,r ,r ). Then r , i =' 1,2,3,
are the components of a radius vector r. Using the result
/dr dl*2 . from Vector Analysis that ), where s is arc
1 1 P
length, is a unit tangent to the u curve at (r ,r ,r ) gives
dr * that , i = 1,2,3, are the components of a unit tangent. Prom calculus
i i 1 i 2 dr 3x du1 dx - du
ds du1 ds du2 ds 2 1 2 du Por the u curve u is constant so that = 0 and thus ds
1 i 1 dr dxx du1
—. = — —. . prom theorem 2.5 ds is given for the hyper-ds 3u ds
2 1 1 1 surface by (ds) = h^du duJ. However along the u curve this
reduces to (ds )2 = h ^ (du1 )2. Thus ds = (h^ ) "du1 and
J — Therefore 4 s " Ch,,)** i i 1 i
dr1 bxx du1 1 3x
ds du1 ds (h 1 Su1
1 Sx1 < and t — 1 are the components of a unit tangent to the u
(h11 P 5u1 1 dx1
curve. By a similar proof it follows that — — - x —•_ are the (h22)s 5u^
2 components of a unit tangent to the u curve.
Definition 2.14: Angle Between a u1 and u2 Curve
43
S be a hypersurface in a Hiemann space and let X be a
coordinate system for so that every point P of S is repre-1 1 1 P
sented in X by x = x (u ,u )• Let x be tlie point of
1 2 2 intersection of the u and u curves formed by letting u = c 1 1 p and u = 3c. The angle between the u and u curves will be
i the angle that the tangent to the u curve at x and in the
1 2 u -u plane must be rotated counter-clockwise so that it lies
2 1 2 on the tangent to the u curve at x in the u -u plane. If
the two curves do not intersect then the angle between them
will be zero.
Theorem 2.6 If S is a hypersurface in the Euclidean
space E > X is a coordinate system for E^ so that the distance P "1 i
ds between two points is (ds) = &.ydx dxJ, are the
components of a metric tensor for S as defined in theorem 2.4,
1 2
the components of the tangents to the u and u curve at the
point x are the components in U, where u is a coordinate sys-
tem for S, of a contravariant tensor of rank one, and S is
Euclidean then the cosine of the angle 9 between the u1 and 2 ^12 u curve is cosG = 1 i 1"' t»
Proof: By theorem 2.5 the components of the tangent to
1 2 1 dx1 1 ax1 the u and u curve are s — , and —•——± — « respectively.
Chn)* au1 (h22)i du
By definition for an Euclidean space
u
1 ax1 1 6 [ LM - r — ] [ l" Ji 0] iJ (hn)
e au1 (h22)s au
COS0
, 1 ax1 . . . 1 ax^ 1 ax1 1 ax3
(n11 )* au1"^ (hn )» du (h22)^ au
2""" (h, ^ ^"2 22 au
1 ax1 ax^ ~ T7~~rx i o
- 1 1 22 d U 5 u
1 W a & i
(h. F(n22)8 au1 au1 au2 au2
axa axa By theorem 2.4 h, . = — , — , so that substituting above yields au1 auJ
h12 cos© = vi, 1
(h^ )8(ii22^S
Theorem 2.7 If X and I are two coordinate systems for an
Euclidean space En, x5* = x^Cy1 y*1) is a permissible trans-
formation, X is a coordinate system so that the distance ds o 1 1 1 1
between two points is (ds) = 6. .dx dxJ, and x = x (s) where i J i
rbr d.v
s indicates arc length then and are the components of a
contravariant tensor of rant one and length one.
Proof; Since the transformation is permissible it is
possible to express y1 as j1 = y1 (x1,... ,xG). Then from cal-
dy1 ay1 dxa dx1 dy* cuius —- = — — . Then — and — are the components of a
ds axa ds ds ds contravariant tensor of rank one.
By definition the length L of a tensor with components

45
dr^" 2
in X is L = 6 ^ ^ 2s" • Also in X the distance bet-ween
two points is given by (ds)2 = S^dx^dx^. .Dividing this last O
expression by (ds) yields 1 - A dx3" dx^ ~ ij ds ds
2 Therefore L =1 and L=1 and the length in X of a tensor with
dx1
components is one. By lemma 2.1 the length will be the same in all other coordinate systems for E . Thus the length
i dx
of a tensor with components ^ is one.
Definition 2.15: Curvilinear Coordinate System Let A X ! p *z
x = x (y ,y ,y ) be a permissible transformation from the
coordinate system I to a coordinate system X for a Riemann
i i i space Rj. If x equals some constant c and c is allowed to
1 1
vary then x =c determines a set of one parameter surfaces in
Y. Thus for a fixed c , i = 1,2,3, three surfaces are deter-
mined and these surfaces will be called the coordinate surfaces 1
for c . Since the transformation is permissible the surfaces
will intersect at only one point and the surfaces x1 .(y1 ,y2,y"^) = c1 and x2(y1,y2,y^) = c2 will intersect in a
•3 line. This line will be called the x^ coordinate curve.
1 2
Similarly the x and x coordinate curve is formed. These
curves, intersecting at the same point the surfaces do, will
be a curvilinear coordinate system for R^.
Definition 2.16: Angle Between Two Coordinate Curves
The angle 9 between the x3" and x^ coordinate curve is the
angle that the tangent to the x 1 coordinate curve at the point
46
of intersection and in the plane determined by the x3" and x^
curves must be rotated counter-clockwise so that it lies on
the tangent to the coordinate curve at the point of inter-
i 1
section and in the plane determined by the x and x° curves.
Theorem 2.8 Let R^ be a Riemann space, be the com-
ponents in the X coordinate system for R^ of a metric tensor,
and the distance ds between two points in X be given by
(ds)2 = g^dx^dx^. Let the permissible transformation
x3" = xi(y1,y2,y^) and (c1,c2,c^) determine a curvilinear co-
ordinate system for R^. If x3" = f"*"(s), if are the
components of a tangent to the x3" coordinate curve as in def-dx1
inition 2.16, and if are the components in X of a
contravariant tensor of rank one and length one then ~ '—, and the cosine of the angle 9 between the x3" and d S
1 ®i.1 xJ coordinate curve is cos© = —u—-r x •
(Sii) a%^) 8
Proof: Let (x1,x2,x^) and (xVdx1 ,x2+dx2,x^+dx^) be two
points on the x3" coordinate curve. Then the distance ds be-
2 i i v - * i
tween these two points is (ds) - gj^dx i an(^ = (g^^cLx •
dx1 I Therefore - i
cSiir ds 8
Since are the components of a contravariant tensor
of rank: one and length one, then by definition the cosine of
the angle © between ^ and ^ is
i
47
dx^ 0 0 3 0 - SiJ ds dF
dx1
Then substituting for yields
_ncjfl si.1
C O S 6 * — • IJ.ri.rrf "I- ..
(Sil)»cSj3)«
Theorem 2.9 Let x3" = c3" be the coordinate curves of a
curvilinear coordinate system in a Riemann space R^ as de-
fined in theorem 2.8. Then the curvilinear coordinate system
will be orthogonal if and only if g ^ - 0 for every point
where i / 3.
Proof: Prom theorem 2.8 the cosine of the angle © be-
i 1 tween the x and x° coordinate curve is
sii COS© = t'1"" -1
Csi3.)s Cs33>
e
If the curves are orthogonal then cos© = 0 and therefore
the above expression for cos© is zero. Thus it must be that
g ^ = 0 for i 4 3*
If g ^ = 0 for i 5 3 then from the above expression for
i 1
cos©, cos© = 0. Hence the x and xJ coordinate curves are
orthogonal. Since and x^ are arbitrary the curvilinear
coordinate system is orthogonal.

BIBLIOGRAPHY
Books
Eisenhart, Luther Pfatiler, Riemannian Geometry. Princeton, Princeton University Press, 1926".
Lass, Harry, Vector and Tensor Analysis, Hew York, McGraw-Hill Inc., 1950"
Sokolnikoff, I. S., Tensor Analysis, New York, John Wiley and Sons Inc., 1951.
48








![Tensor Decompositions and Applications · 2018-09-11 · TENSOR DECOMPOSITIONS AND APPLICATIONS 457 (CP) [38, 90] and Tucker [226] tensor decompositions can be considered to be higher-order](https://img.pdfslide.us/doc/110x75/5f02faff7e708231d406f3cd/tensor-decompositions-and-applications-2018-09-11-tensor-decompositions-and-applications.jpg)



![TENSOR ALGEBRAS OVER HILBERT SPACES. I1956] TENSOR ALGEBRAS OVER HILBERT SPACES. I 109 permutation that consists of the transposition of 1 and r. A more general type of quantum statistics,](https://img.pdfslide.us/doc/110x75/5edca3fead6a402d666764c1/tensor-algebras-over-hilbert-spaces-i-1956-tensor-algebras-over-hilbert-spaces.jpg)
















