Embed Size (px)
Citation preview

Temporal video segmentation and classification of edit effects
Sarah Porter*, Majid Mirmehdi, Barry Thomas
Department of Computer Science, University of Bristol, Bristol BS8 1UB, UK
Accepted 13 August 2003
Abstract
The process of shot break detection is a fundamental component in automatic video indexing, editing and archiving. This paper introduces
a novel approach to the detection and classification of shot transitions in video sequences including cuts, fades and dissolves. It uses the
average inter-frame correlation coefficient and block-based motion estimation to track image blocks through the video sequence and to
distinguish changes caused by shot transitions from those caused by camera and object motion. We present a number of experiments in which
we achieve better results compared with two established techniques.
q 2003 Elsevier B.V. All rights reserved.
Keywords: Shot transitions; Shot break detection; Shot classification; Video segmentation
1. Introduction
Indexing and annotating large quantities of film and
video material is becoming an increasing problem through-
out the media industry, particularly where archived material
is concerned. Manually indexing video content is currently
the most accurate method but it is a very time consuming
process. Considerable amounts of archived data remain
unindexed which often leads to the production of new film
instead of the reutilisation of existing material. An efficient
video indexing technique is to temporally segment a
sequence into shots, where a shot is defined as a sequence
of frames captured from a single camera operation, and then
select representative key-frames to create an indexed
database. Hence, a small subset of frames can be used to
retrieve information from the video and enable content-
based video browsing.
There are two different types of transitions that can occur
between shots: abrupt (discontinuous) shot transitions also
referred to as cuts; or gradual (continuous) shot transitions
such as fades, dissolves and pushes or wipes. A cut is an
instantaneous change from one shot to another. During a
fade, a shot gradually appears from, or disappears to, a
constant image. A dissolve occurs when the first shot fades
out whilst the second shot fades in. There are hundreds of
different pushes or wipes, and all are considered to be
special transitional effects [1]. One example is when the new
shot pushes the last shot off the screen to the left, right, up or
down. In general during a wipe, the new shot is revealed by
a moving boundary in the form of a line or pattern.
Shots unified by a common locale or event are grouped
together into scenes. Although the cut is the simplest, most
common way of moving from one shot to the next, gradual
transitions are often used at scene boundaries to emphasis
the change in content of the sequence [2]. Hence, detecting
gradual transitions is particularly important for the identi-
fication of key-frames. The most common edit effects used
in video sequences are cuts, fades and dissolves [1]. In fact,
the data set used in this paper contains 450 cuts, 79 fade-ins,
74 fade-outs, 114 dissolves and only 5 wipes over a total of
21580 frames.
In the case of shot cuts, the content change is usually
large and easier to detect than the content change during a
gradual transition [3,4]. Fig. 1 shows a sequence of four
consecutive frames with a shot cut occurring between the
second and third frame. The significant inter-frame
difference during the shot cut is clearly shown. In contrast,
Fig. 2 shows six frames during a dissolve and illustrates that
the inter-frame difference during a gradual transition is
small. Indeed, the content change caused by camera
operations, such as pans, tilts or zooms and object move-
ment can be of the same magnitude as those caused by
gradual transitions. This makes it difficult to differentiate
0262-8856/$ - see front matter q 2003 Elsevier B.V. All rights reserved.
doi:10.1016/j.imavis.2003.08.014
Image and Vision Computing 21 (2003) 1097–1106
www.elsevier.com/locate/imavis
* Corresponding author.
E-mail address: [email protected] (S. Porter).

between changes caused by a continuous edit effect and
those caused by object and camera motion without also
incurring a large number of false positives. A comparison of
recent algorithms shows that the false positive rate when
detecting dissolves is usually unacceptably high, indicating
that reliable dissolve detection is still an unsolved problem
[3]. In this paper, we introduce a novel approach for the
detection and classification of the most commonly occurring
shot transitions: cuts, fades and dissolves.
Section 2 presents a brief overview of previous
approaches to video segmentation. In Section 3 we propose
a method designed explicitly to detect shot cuts using block-
based motion compensation. Normalised correlation
implemented in the frequency domain is used to estimate
the motion for each block. In Section 4, we extend the
algorithm for shot cut detection to detect fades and
dissolves. The proposed method uses block tracking to
differentiate between changes caused by gradual effects and
those caused by object and camera motion and it has been
designed to handle some of the shortcomings of previous
methods [5,6]. Experimental results confirming the validity
of the approach are presented and discussed in Section 5.
2. Previous work
Most of the existing methods for shot cut detection use
some inter-frame difference metric applied to various
features related to the visual content of a video. A frame
pair where this difference is greater than some predefined
threshold is considered to contain a shot cut. For each
selected feature, a number of suitable metrics can be
applied. In this section, we only outline the main
contributions but good summaries and comparisons of
features and metrics used for video segmentation with
respect to the quality of results obtained can be found in
Fig. 1. Four consecutive frames containing a shot cut between the second and third frame.
Fig. 2. Frames from a dissolve which occurs over 25 frames.
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–11061098

several references [2–4,7–9]. Arguably, the simplest of
these methods is pair-wise pixel comparison, or frame
differencing. This compares the corresponding pixels
between two frames to determine how many have changed
[6]. The drawback of frame differencing is that it is sensitive
to small camera and object motions which can lead to a high
number of false positives [9]. Zhang et al. reduced the
effects of motion and noise by firstly applying a 3 £ 3
averaging filter [6]. They also suggested a more robust
method based on dividing a frame into regions and
comparing corresponding regions instead of individual
pixels. Regions were compared on the basis of second-
order statistical characteristics of their intensity values using
the likelihood ratio as the disparity metric [10]. This method
is less sensitive to local object motion but can still lead to
false positives in the presence of large object and camera
motions. A potential problem with the likelihood ratio is
that two regions may have the same mean and variance but
completely different probability functions. In such a case, a
shot cut would be missed.
Instead of comparing features based on individual pixels
or regions, features of the entire image have been used for
comparison to reduce further the sensitivity to object and
camera motion. For example, the average intensity measure
compares the average of the intensity values for each frame
pair [11]. Another global feature which has been used is a
histogram of intensity values [2,4,6,12]. An intensity
histogram of an image describes the distribution of the
intensities while ignoring the spatial distribution of pixels
within an image. The basic idea of using histograms is that
two frames with unchanging background and unchanging
objects will have similar intensity distributions even in the
presence of object and camera motion. A shot cut is detected
if the bin-wise difference between the histograms of two
consecutive frames exceeds some threshold. A disadvantage
of histogram-based (HB) methods is that a shot cut may be
missed between two shots with similar intensity distri-
butions but different content. To overcome this, Nagasaka
and Tanaka proposed dividing each frame into 16 blocks
and computing the difference between local histograms
[12]. They also removed the eight largest differences before
computing a single difference metric. This way, the method
is still robust to local motions within a region, and by
discarding the largest differences the method becomes less
sensitive to large object and camera motions. One drawback
is that this method may miss a cut between two shots with
similar backgrounds because the blocks that have changed
are the very ones being removed. They also compared
several different statistics on grey-level and colour histo-
grams and found the best performance was obtained by
using the x 2 test to compare colour histograms [13]. Each
pixel is represented by a colour code obtained by merging
the two most significant bits of each RGB component. This
also helped reduce the effect of changes in the luminance.
HB methods are the most common approach to shot cut
detection in use today, since they offer a good trade-off
between accuracy and computational efficiency [2,4,6,12].
All of the previously mentioned algorithms have been
devised for shot cut detection only. The difference between
a frame pair during a gradual transition is much smaller than
the difference that occurs during a shot cut. Lowering the
threshold to detect such small differences may result in
many false detections due to the differences caused by
camera and object motion. Zhang et al. proposed a twin
comparison technique comparing the histogram difference
with two thresholds [6]. A lower threshold was used to
detect small differences that occur for the duration of the
gradual transition while a higher threshold was used in the
detection of shot cuts and gradual transitions. This method
can fail when camera operations such as pans generate a
change in the colour distribution similar to that caused by a
gradual transition. To overcome this, they suggested
analysing the motion between frames to identify camera
operations such as pans, tilts and zooms. Where this type of
motion is identified the gradual transition is assumed to be
false to reduce the number of false positives. However, this
means that gradual transitions containing object or camera
motions will not be detected.
Motion-based algorithms (MB) have been proposed to
distinguish between changes caused by motion and those
caused by an edit effect [2,4,14]. Shahraray noted that
block-based comparison is usually performed by super-
imposing each block of the first image on exactly the same
location of the second image [6,12,14]. It was suggested that
a more robust measure can be obtained by motion
compensating blocks prior to calculating the block-wise
difference metrics. Shahraray used a weighted sum of the
motion-compensated pixel differences as the disparity
metric [14]. If this difference measure exceeds some
threshold a shot cut is detected. Gradual transitions are
detected by locating a sustained small increase in the
difference metric. Such methods may detect false positives
if there exists several blocks with poor matches as a result of
multiple motions within a block or in the presence of
motions that violate the translational model, while the
majority of blocks match well. To overcome the problem of
such outliers, Shahraray used an order statistic filter to
combine the disparity metrics of all the blocks [14]. In this
method, the values for each block are sorted in ascending
order and a weighted sum is computed where the
coefficients for each match value are assigned according
to the position of the value in the sorted list. While this may
reduce the chances of detecting shot transitions between
scenes with shared backgrounds, by choosing the coeffi-
cients properly it reduces the number of false detections in
the presence of several extremely bad matches compared to
the use of a linear combination of the similarity metrics.
Lupatini et al. also evaluate the motion compensated
difference values of each block [4]. They noted that since
the difference values are obtained by a pixel–pixel
comparison the method can still be highly sensitive to
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–1106 1099

local motions. In order to overcome this problem, instead of
considering pixel differences, the average of the luminance
function was evaluated for each block. Instead of computing
a motion compensated disparity metric, Akutsu et al.
analysed the motion field measured between two frames
to detect shot cuts [15]. The disparity value between two
consecutive frames was then computed as the inverse of
motion smoothness.
Zabih et al. proposed another method to detect abrupt and
gradual transitions by checking the spatial distribution of
exiting and entering edge pixels [5]. Transitions were
identified by examining the relative values of the entering
and exiting edge percentages. To make the algorithm more
robust with respect to camera motions the two frames were
registered before comparison. However, despite the global
motion compensation this method is still sensitive to object
motion and camera motions such as zooms. Lienhart
proposed two algorithms, one to detect fades and the other
dissolves [3]. The first method detects fades by examining
the standard deviation of pixel intensities, which exhibits a
characteristic pattern during a fade. The second method is
based on the idea that there is a loss of contrast in an image
during a dissolve. The author described an edge-based
contrast feature, which emphasises the loss in contrast to
enable dissolve detection. One further approach for
detecting specifically dissolves is to monitor the temporal
quadratic behaviour of the variance of the pixel intensities
which was first proposed by Alattar, but has been modified
by other authors [16,17]. During a dissolve the intensity
variance starts to decrease at the beginning of a transition,
reaches its minimum in the middle and starts to increase
towards the end of the transition. Hence, the transition is
detected by locating this pattern in a series of variances.
However, a problem of this approach is that the pattern is
not sufficiently pronounced due to noise and motion in the
video [8].
The majority of the existing methods for detecting shot
transitions are weakened by camera and object motion and
sudden changes in the mean intensity within a shot. Yusoff
et al. proposed a method for shot cut detection which uses a
combination of multiple experts [18]. The experts them-
selves are stand-alone methods to detect shot cuts like those
mentioned above. However, they suggested that because
each method performs well in different circumstances,
significantly better results can be obtained by combining
these methods, as opposed to using each on their own.
Several authors have also proposed methods to detect the
type of motions that cause a sustained increase in the
disparity metric similar to that caused by a gradual transition
to reduce the number of false detections [6,14]. However, as
mentioned earlier these methods can then fail to detect
gradual transitions in the presence of such motion before,
during or after the transition. The conclusion must be that, a
shot transition detection method is still required that is
robust in the presence of camera and object motion and
changes in the global illumination.
3. Shot cut detection
We propose a MB to identify shot cuts which deals
inherently with object and camera motion. It uses block-
matching motion compensation to generate an inter-frame
difference metric. For each block in frame n; the best match
in a neighbourhood around the corresponding block in
frame n þ 1 is sought. This is achieved by calculating the
normalised correlation between blocks and locating the
maximum correlation coefficient. Calculating the normal-
ised correlation in the spatial domain is, however,
prohibitively expensive unless the blocks are small.
Hence, we perform normalised correlations in the frequency
domain [19] defined by:
rðjÞ ¼F21{x̂1ðvÞx̂
p2ðvÞ}ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiÐ
lx̂1ðvÞl2
dvÐlx̂2ðvÞ
2 dv
q ð1Þ
where j and v are the spatial and spatial frequency
coordinate vectors, respectively, x̂iðvÞ denotes the Fourier
transform of block xiðjÞ; F21 denotes the inverse Fourier
operator and p is the complex conjugate. A high-pass filter
is applied to each image before performing the correlations
to accentuate the contributions from higher spatial frequen-
cies, since a correlation field derived from high-pass regions
will contain more detectable peaks. Correlation fields
derived from low-pass regions will result in a flat correlation
field leading to inaccurate peak detection [20]. For this
reason, blocks with insufficient energy are not used. A
consequence of applying the high-pass filter is that the mean
of the image is removed. Hence, the correlation between
blocks is invariant to changes in the mean intensity. By
normalising the correlation, the method is insensitive to a
positive scaling of the image intensities. Most of the
previous methods for shot cut detection may falsely detect a
shot cut where sudden intensity changes occur within a shot,
for example, where there is a change in the lighting
conditions. By applying a high-pass filter and performing
normalised correlation our method is robust to changes in
the global illumination.
The location of the maximum correlation coefficient is
used to find the offset of each block in frame n þ 1 from its
position in frame n: Previous approaches use the estimated
motion vectors to calculate the motion-compensated frame
difference [14]. In contrast, our approach uses only the value
of the maximum correlation coefficient, as a goodness-of-fit
measure for each block. The value of the goodness-of-fit
measure lies between 0 and 1, where a value of 0 indicates a
complete mismatch and a value of 1 indicates a perfect
match. Fig. 3(a) shows the correlation field which resulted
from the correlation between two blocks from a frame pair
within the same shot and Fig. 3(b) shows the correlation
field from a frame pair containing a shot cut. Between two
frames belonging to the same shot, the goodness-of-fit for
the majority of the blocks should be close to 1.0, indicating
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–11061100
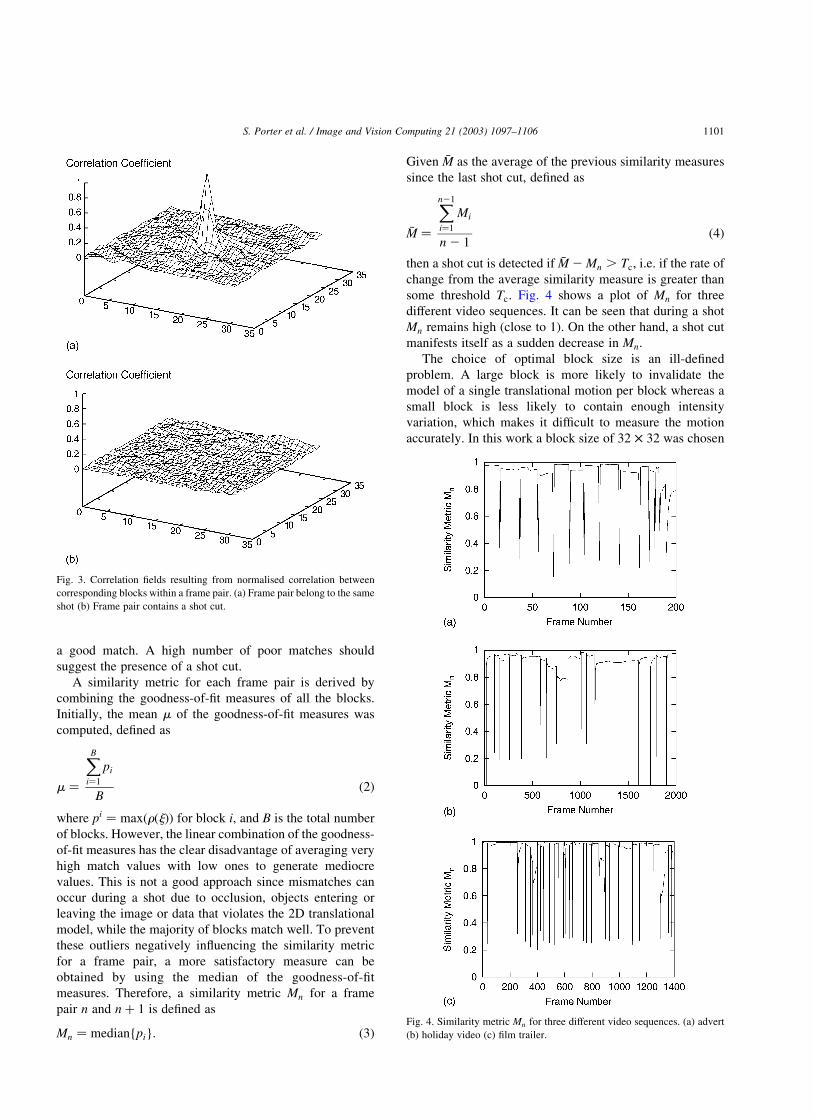
a good match. A high number of poor matches should
suggest the presence of a shot cut.
A similarity metric for each frame pair is derived by
combining the goodness-of-fit measures of all the blocks.
Initially, the mean m of the goodness-of-fit measures was
computed, defined as
m ¼
XB
i¼1
pi
Bð2Þ
where pi ¼ maxðrðjÞÞ for block i; and B is the total number
of blocks. However, the linear combination of the goodness-
of-fit measures has the clear disadvantage of averaging very
high match values with low ones to generate mediocre
values. This is not a good approach since mismatches can
occur during a shot due to occlusion, objects entering or
leaving the image or data that violates the 2D translational
model, while the majority of blocks match well. To prevent
these outliers negatively influencing the similarity metric
for a frame pair, a more satisfactory measure can be
obtained by using the median of the goodness-of-fit
measures. Therefore, a similarity metric Mn for a frame
pair n and n þ 1 is defined as
Mn ¼ median{pi}: ð3Þ
Given �M as the average of the previous similarity measures
since the last shot cut, defined as
�M ¼
Xn21
i¼1
Mi
n 2 1ð4Þ
then a shot cut is detected if �M 2 Mn . Tc; i.e. if the rate of
change from the average similarity measure is greater than
some threshold Tc: Fig. 4 shows a plot of Mn for three
different video sequences. It can be seen that during a shot
Mn remains high (close to 1). On the other hand, a shot cut
manifests itself as a sudden decrease in Mn:
The choice of optimal block size is an ill-defined
problem. A large block is more likely to invalidate the
model of a single translational motion per block whereas a
small block is less likely to contain enough intensity
variation, which makes it difficult to measure the motion
accurately. In this work a block size of 32 £ 32 was chosen
Fig. 3. Correlation fields resulting from normalised correlation between
corresponding blocks within a frame pair. (a) Frame pair belong to the same
shot (b) Frame pair contains a shot cut.
Fig. 4. Similarity metric Mn for three different video sequences. (a) advert
(b) holiday video (c) film trailer.
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–1106 1101

empirically as it gives an acceptable trade-off between
accuracy and the resolution of the motion field (using
images with typical dimensions 256 £ 256).
4. Detecting fades and dissolves
The method described above responds well to shot cuts.
In this section we describe the extension of this method to
also detect fades and dissolves. As in shot cut detection,
most of the previous approaches to detecting gradual
transitions are also sensitive to object and camera motions.
We propose a method that can differentiate between
changes caused by a gradual transition from those caused
by camera and object motion.
The shot cut detection method described in Section 3 can
be straightforwardly extended to detect fades. The end of a
fade-out and the start of a fade-in is marked by a constant
image. A constant image contains very little, if any, high-
pass energy. Therefore, correlation of an image with a
constant image results in Mn ¼ 0 which can be used to
identify the end of a fade-out and the start of a fade-in.
However, gradual transitions occur over a number of frames
so knowledge of the boundaries of the edit effect is required.
A fade is a scaling of the pixel intensities over time which
can be observed in the standard deviation of the pixel
intensities [3]. If Mn falls to 0 and the standard deviation of
the pixel intensities decreased prior to this, the frame where
the standard deviation started to decrease is marked as the
first frame of the fade-out. The decrease in the standard
deviation must have occurred over more than two frames to
distinguish fade-outs from a shot cut to a constant image.
Similarly, if the standard deviation of the pixel intensities
increases after the similarity metric increases from 0, the
frame where the standard deviation becomes constant is
marked as the end of the fade-in. Again, this must have
occurred over more than two frames. Initially, to compute
where the standard deviation becomes constant after a fade-
in, the standard deviation of frame n; denoted sn; was
compared to the standard deviation of frame n 2 1; sn21: If
sn # sn21 then the end of the fade-in was marked.
However, we observed that often the scaling factor is not
altered for every frame but only every other frame.
Therefore, the end of a fade-in would be marked too
early. Hence, the end of the fade-in was marked when
sn #sn21 þ sn22
2:
A similar comparison is used to detect the start of a fade-out.
Extending this method to detect dissolves is somewhat
more involved. The difference between each frame pair
during a dissolve is so small that Mn does not indicate that a
dissolve has occurred. We divide the first frame of a
sequence into a regular grid of blocks of size 32 £ 32.
A selection of these blocks is then used to represent
regions of interest (ROI) in the image. A block is selected as
a ROI if
sb2 .
sI2
lnðsI2Þ
ð5Þ
where sb2 is the variance of a block b and sI
2 is the
variance of the image I: This is to prevent all of the blocks in
an image with low variance being selected as ROI. Fig. 5
shows the first frame of two shots and their selected ROI
highlighted in white.
In Section 3, the method for shot cut detection discarded
the motion vector estimated from block matching using only
the correlation peak value. However, motion estimation
between frame pairs is now used to track blocks over time
in the video sequence. Between each frame pair n and
n þ 1; Mn is still computed to detect shot cuts. In addition,
each ROI is correlated with its new location in frame
n þ 1; n þ 2; etc. as shown in Fig. 6(a–c), until the end of
the next edit effect or until the block is removed. The value
of the correlation peak, maxðrðjÞÞ; is used as a goodness-of-
fit measure for each ROI over time. A single similarity
metric Fn for the set of ROI is calculated by taking the
median of the goodness-of-fit measures for all the ROI to
reduce the effect of outliers.
As mentioned earlier, blocks are tracked through the
shot, irrespective of how far they have moved until the next
edit effect or until they are removed. While tracking, object
or camera motion may cause blocks to become overlapped
as shown in Fig. 6(c). Once this occurs the block tracking is
no longer reliable because block-matching cannot resolve
occlusion. Therefore, blocks that are overlapping or have
begun to move outside the image are removed as shown in
Fig. 6(d). If any of the removed blocks were a ROI they are
also removed from the current set of ROI. This will leave
Fig. 5. Blocks are selected to be regions of interest (ROI) in the first frame of each shot.
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–11061102

areas of the image uncovered, the contents of which will still
need to be tracked. For this reason we try to reintroduce new
blocks in the uncovered areas. This is achieved by
comparing the current positions of the remaining blocks to
a regular spatial grid. Any blocks in this regular grid that are
not covered by the current set of blocks are added as shown
in Fig. 6(e). If a new block satisfies Eq. (5) it is added to the
current set of ROI. Once this is complete it is possible to
continue to track the blocks into the next frame (Fig. 6(f)).
The addition and removal of blocks allows the set of ROI to
be updated for changes due to camera and object motion.
During a shot, Fn should remain high indicating that the
contents of each ROI has not changed significantly. During
a dissolve, the content of each ROI gradually changes and
Fn will decrease until it reaches its lowest value at the end of
the dissolve. During a shot Mn and Fn should be
approximately equivalent. Rather than compare the value
of Fn to a threshold, we want to compare how much it has
changed with respect to Mn: Hence, we define the ratio Rn as
Rn ¼Mn
Fn
: ð6Þ
If Rn is greater than a threshold TD then the end of the
dissolve is marked once Rn reaches its maximum. The start
of the dissolve is marked where Rn started to increase.
Fig. 7 shows Fn and Rn during three consecutive
dissolves in a video sequence. It can be seen that Fn
decreases during a dissolve and reaches its minimum at
the end. During these three dissolves Mn remained
approximately equal to 1, causing Rn to increase during
each dissolve. The three dissolves are therefore easily
detected.
After every detected shot transition, the first frame of the
next shot is divided into a regular grid and a new set of ROI
are selected to be tracked for the detection of the next edit
effect.
5. Comparative results
To evaluate the performance of this algorithm it was
compared with the performance of two other methods, one
HB and one feature-based. The HB method was chosen
since it is a well-established technique and has been shown
to perform well in detecting edit effects [4]. The feature-
based (FB) method was chosen for its ability to detect
gradual transitions, although its performance was reported
on limited test sequences [5,21].
The HB method used is similar to the method with the
best performance in the comparative investigation by
Lupatini et al. [4]. This approach uses the x2 value to
define the difference between two global colour histograms
which is compared against two thresholds, TH and TL:
Whenever the histogram difference between two consecu-
tive frames is greater than TH; a shot cut is detected. If the
difference lies between the two thresholds the frame is
marked as the potential start of a gradual transition.
Successive frames are then compared with the first frame
of the transition and if the difference exceeds TH; a gradual
transition is detected. The end of the gradual transition is
marked once the difference between frame pairs drops
below TL for two frame pairs.
The FB method used was by Zabih et al. [5,21] and the
code for this algorithm has been made available allowing
exactly the same implementation to be used. The approach
is based on the idea that during a cut or a dissolve, new
edges appear far from the locations of disappearing, older
edges. By comparing the relative values of entering and
exiting edge pixels the method classifies cuts, fades and
Fig. 6. (a–c) Blocks are tracked over time and may become overlapped, (d)
overlapped blocks removed, (e) blocks added in uncovered area, (f) blocks
continue to be tracked.
Fig. 7. Feature similarity metric Fn and ratio Rn during three consecutive
dissolves.
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–1106 1103

dissolves. A registration technique is used to compensate for
global motion between two frames. To compensate for
small object motions edge pixels in one image within a
small distance of edge pixels in the other image are not
considered to be entering or exiting edges.
To test these methods 10 different movie trailers were
used. These were found to be a good source of data since
they tend to contain many shot transitions over a short
sequence. The locations and types of these transitions were
hand-labelled for comparison. The distribution of shot
transitions in the complete set of test data can be seen in
Table 1.
For each algorithm we experimented with a single
training sequence and performed an exhaustive search to
select the parameter values which gave the best perform-
ance. Two parameters often used to compare the perform-
ance of shot boundary detection methods are recall and
precision [2], defined as
Recall ¼NC
NC þ NM
Precision ¼NC
NC þ NF
ð7Þ
where NC;NM; and NF are the number of correctly detected,
the number of missed, and the number of falsely detected
shot transitions, respectively. In other words, recall is the
percentage of true transitions detected, and precision is the
percentage of detected transitions that are actually correct.
For each method, the recall and precision values were
computed for every parameter set tried. Assuming recall and
precision are equally important, the threshold values, which
gave the greatest linear combination of recall and precision
were chosen. Each method was then run over the complete
data set using its chosen parameter set. For a robust
algorithm the selected thresholds should generalise well to
other sequences particularly as the training sequence and the
test sequences are all of the same type (film trailers).
The proposed motion-based approach and the HB
approach both require two parameter values. The feature-
based approach requires five main parameters, which would
require searching a large set of possible parameter values.
However, the authors report that although the algorithm has
several parameters that control its performance they
achieved good performance from a single set of values for
three of these parameters across all the sequences they
tested (they do not report the values used for the remaining
two) [5]. They state that their algorithm’s performance does
not depend critically upon the precise values of these
parameters, but report the values they found to give the best
performance. Therefore, these values are used in
the experiments and a search was performed only for values
for the remaining two thresholds.
A novel aspect of our method is its ability to classify
transitions into cuts, fade-ins, fade-outs and dissolves.
Therefore, in our experiments we are not only concerned
with the detection of transitions but also their correct
classification. If a shot transition was detected, but not
classified correctly, it was considered a false detection and
the actual edit effect was labeled as undetected. What
‘classify correctly’ means is relative to each algorithm’s
ability to classify shot transitions. Our method must classify
each effect (cuts, fade-ins, fade-outs and dissolves)
correctly.
The FB method attempts to classify edit effects into cuts,
fades and dissolves. Therefore, if this algorithm classified a
fade-in or a fade-out as a fade, it was considered a correct
classification. The HB method only distinguishes between
cuts and gradual transitions. Thus, it must classify cuts
correctly, but if it classifies a fade-in, fade-out or dissolve as
a gradual transition this is also considered a correct
classification. Only if it detected, for example, several
shot cuts during a dissolve is the dissolve considered
undetected and each shot cut is considered a false detection.
The reason for not using a comparison based simply on
detection rather than correct classification is related to the
accuracy of the boundaries of the detected shot transitions.
A shot cut only occurs between two frames where as a
gradual transition occurs over a number of frames. If an
algorithm declares a gradual transition where there exists a
shot cut, which sometimes happens due to the presence of
motion before and after a cut, or it declares several shot cuts
during a gradual transition, which can often be the result of a
rapid transition, then the precision of the detected transition
boundaries will be poor. In fact, in the comparative study by
Lupatini et al. they consider a transition (cut or gradual) to
be correctly detected if at least one of its frames has been
detected as a shot transition [4]. However, they also define
two more parameters to evaluate the precision of the
detected boundaries and note that they frequently assume
very low values. Also, if an algorithm detects several shot
cuts during a gradual transition it will obviously result in a
high number of false detections. In the comparative study by
Boreczky and Rowe a gradual transition was correctly
detected if any of the frames of the transition was marked as
a shot boundary [2]. To reduce the number of false positives
during gradual transitions they did not penalise an algorithm
for reporting multiple consecutive frames as shot cuts.
However, if, for example, an algorithm marked every other
frame of a gradual transition as a shot boundary, the first
would be a correct detection and the remainder would be
false positives. An algorithm must be able to distinguish
between cuts and gradual transitions to improve the
precision of the detected boundaries and to reduce the
number of false positives during gradual transitions.
The performance of our MB compared with those of the
HB and FB methods for shot cut detection only can be seen
Table 1
Number and types of edit effects contained within the complete test data set
Cuts Fade-ins Fade-outs Dissolves
450 79 74 114
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–11061104

in Table 2. A comparison of the performance of the
algorithms for the detection of gradual transitions can be
seen in Table 3. In these two tables we report the total results
across all 10 sequences in the data set. It should be noted
again that while we classify gradual transitions into fade-
ins, fade-outs, and dissolves, FB only classifies into fades
and dissolves and HB does not make a distinction at all. For
these experiments, if an edit effect was detected but
classified incorrectly (according to each method), it was
considered a false detection and the actual edit effect was
labelled as undetected. From Tables 2 and 3 it is clear that
our proposed method performs better compared with the
other two techniques over our chosen data set.
Table 4 summarises the performance of the algorithms
by comparing the recall and precision of each one (after
combining the results for the gradual transitions for FB and
MB). It also shows the overall performance, which is a
linear combination of the recall and precision value
assuming they are both equally important. FB’s perform-
ance was disappointing as it detected many false gradual
transitions and few of the actual gradual transitions,
reflected by the low precision and recall values (33 and
45%, respectively). There are several reasons for this. The
algorithm compensates only for translational motion. This
means that zooms are a cause of false detections. Also, the
registration technique used only computes the dominant
motion, meaning that multiple object motions within the
frame are another source of false detections. Furthermore, if
there are strong motions before or after a cut, the cut is
typically misclassified as a dissolve and cuts to or from a
constant image are misclassified as fades.
The results for the HB method were a considerable
improvement on the FB approach. The biggest drawback is
that many gradual transitions are misclassified as shot cuts,
resulting in a low recall value for gradual transitions (58%)
and a low precision value for shot cuts (30%). One reason
why the recall values for HB are low is that it misses edit
effects between shots with similar colour distributions.
Another reason is that if a gradual transition is closely
followed by another, then HB often detects this as a single
transition, meaning that the first one is detected and the
second is considered undetected. Finally, another source of
false detections was camera and object motion that created
changes similar to that caused by a gradual transition.
Our proposed motion-based algorithm gives the most
favourable results with high recall and precision values and
the best performance for both cuts and gradual transitions.
In addition, our algorithm is able to distinguish between
fade-ins, fade-outs, and dissolves. The main cause of false
detections of dissolves in our technique was due to the
contents of a ROI changing, not in the presence of a
dissolve, but for example due to motion blur or a light
source that saturates a large part of the image. Also, if a shot
cut is undetected, then the set of ROI are not updated and
they are tracked into the next shot resulting in a
misclassification as a dissolve.
6. Conclusions
We have presented a novel, unified approach that
classifies shot boundaries into cuts, fade-ins, fade-outs and
dissolves. The recall, precision and performance values
show either a significant improvement on other approaches
or are comparable given that all shot transitions are
separately resolved. This was shown experimentally in a
comparative study against two commonly used techniques.
A weakness of our method is that it will track the most
dominant motion if there are multiple motions within a
block. This can cause the contents of a ROI to change and
result in a decrease in Fn leading to a false detection of a
dissolve. Such problems might be improved by using a
multi-resolution model to estimate the motion [20].
Another drawback to our method is the computational
cost. Our approach takes around 2 s to complete a frame
pair. In this time, the FB approach completed four frame
pairs and the HB approach 30 frame pairs. However, we feel
Table 2
Detection and classification of shot cuts for each method over the complete
data set
Detected Method
MB HB FB
NC 410 301 329
NM 40 149 121
NF 48 190 224
Table 3
Detection and classification of gradual transitions for each method over the
complete data set
Detected Method and effects
MB FB HB
Fade-ins Fade-outs Dissolves Fades Dissolves Gradual
NC 64 71 103 66 55 155
NM 15 3 15 87 59 112
NF 1 6 63 86 164 27
Table 4
Recall, precision and performance for each method over all the cuts and
gradual transitions
Parameters (%) Method and Effects
MB HB FB
Cuts Gradual Cuts Gradual Cuts Gradual
Recall 91 88 67 58 73 45
Precision 90 77 61 85 60 33
Performance 90.5 82.5 64 71.5 66.5 39
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–1106 1105

that the increase in processing time can be justified by the
significant improvement in the quality of results. In fact,
Zhang et al. who proposed the ‘twin comparison’ technique
suggest using a block matching algorithm to try and
distinguish changes caused by camera movements from
those due to gradual transitions to reduce the number of
false positives [6]. They propose using motion vectors
obtained from a block matching algorithm to try and classify
certain camera operations (panning, tilting, zooming). If
such camera operations are detected during a potential
gradual transition then the transition is ignored. The authors
note the number of false positives is reduced at a cost of an
increase in computational time.
There are advantages in working with the block-
matching algorithm and in the future we plan to attempt
to make use of motion vectors contained in MPEG-
compressed video if present. Although, MPEG encoders
optimise for compression and do not necessarily produce
accurate motion vectors, such estimates might be used as an
initial, rough approximation of the location of the best
matching block. If using correlation in the frequency
domain it will help centralise the correlation peak and
improve the goodness-of-fit measure. If implementing
correlation in the spatial domain it can be used to reduce
the search space therefore reducing the amount of
computation required for the correlation.
Although threshold values were chosen that gave the best
performance on a training sequence before applying the
algorithms to the test data, these thresholds might not have
been equally suitable for every sequence. If the performance
of an algorithm is very dependent on the thresholds selected
then we consider this to be a weakness of the algorithm.
However, future work will be carried out to test the
dependency of these algorithms on the threshold values used.
Acknowledgements
The authors would like to thank EPSRC and UBQT
Media Ltd, Bristol for sponsorship of this work.
References
[1] C. Jones, Transitions in video editing, in: B. Hoffman, The
Encyclopedia of Educational Technology, San Diego State Univer-
sity, 1994–2003
[2] J. Boreczky, L. Rowe, Comparison of video shot boundary detection
techniques, in: SPIE Conference on Storage and Retrieval for Image
and Video Databases IV, vol. 2670, 1996, p. 170–179.
[3] R. Lienhart, Comparison of automatic shot boundary detection
algorithms, in: SPIE Conf. on Storage and Retrieval for Image and
Video Databases VII, vol. 3656, 1999, p. 290–301.
[4] G. Lupatini, C. Saraceno, R. Leonardi, Scene break detection: a
comparison, in: 8th International Workshop on Research Issues in
Data Engineering, 1998, pp. 34–41.
[5] R. Zabih, J. Miller, K. Mai, A. feature-based, A feature based
algorithm for detecting and classifying scene breaks, in: ACM
Multimedia ’95 Proceedings, ACM Press, New York, 1995.
[6] H. Zhang, A. Kankanhalli, S.W. Smoliar, Automatic partitioning of
full-motion video, Multimedia Systems 1 (1) (1993) 10–28.
[7] R. Lienhart, Reliable transition detection in videos: A survey and a
practitioner’s guide, International Journal of Image and Graphics 1 (3)
(2001) 469–486.
[8] A. Hanjalic, Shot-boundary detection: Unraveled and resolved, IEEE
Transactions on Circuits and Systems for Video Technology 12 (2)
(2002) 90–105.
[9] Y. Yusoff, W. Christmas, J. Kittler, A. study, A study on automatic
shot change detection, in: Third European Conference on Multimedia
Applications, Services and Techniques, 1998, pp. 177–189.
[10] R. Kasturi, R. Jain, Computer Vision: Principles, IEEE Computer
Society, Silver Spring, 1991.
[11] A. Hampapur, R. Jain, T. Weymouth, Digital video segmentation, in:
ACM Multimedia ‘94 Proceedings, ACM Press, New York, 1994, pp.
357–364.
[12] A. Nagasaka, Y. Tanaka, Automatic video indexing and full-video
search for object appearances, in: Visual Database Systems, 2, 1992,
pp. 113–127.
[13] J.A. Rice, Mathematical statistics and data analysis, second ed.,
Duxbury Press, North Scituate, 1995.
[14] B. Shahraray, Scene change detection and content-based sampling of
video sequences, in: Digital Video Compression: Algortithms and
Technologies, 2419, 1995, pp. 2–13.
[15] A. Akutsu, Y. Tonomura, H. Hashimoto, Y. Ohba, Video indexing
using motion vectors, in: SPIE Visual Communication and Image
Processing, vol. 1818, 1992, pp. 1522–1530.
[16] A. Alattar, Detecting and compressing dissolve regions in video
sequences with a DVI multimedia image compression algorithm, in:
Proceedings of the IEEE International Symposium on Circuits and
Systems, 1993, pp. 13–16.
[17] W.A.C. Fernando, C.N. Canagarajah, D.R. Bull, Fade and dissolve
detection in uncompressed and compressed video sequences, in:
Proceedings of the IEEE International Conference on Image
Processing, 1999, pp. 299–303.
[18] Y. Yusoff, J. Kittler, W. Christmas, Combining multiple experts for
classifying shot changes in video sequences, in: Proceedings of the
IEEE International Conference on Multimedia Computing and
Systems, vol. 2, 1999, pp. 700–704.
[19] A.D. Calway, H. Knutsson, R. Wilson, Multiresolution estimation of
2-d disparity using a frequency domain approach, in: British Machine
Vision Conference, 1992, pp. 227–236.
[20] S. Kruger, Motion analysis and estimation using multiresolution affine
models, PhD Thesis, Department of Computer Science, University of
Bristol, (October, 1998)
[21] R. Zabih, J. Miller, K. Mai, A feature-based algorithm for detecting
and classifying production effects, Multimedia Systems 7 (1999)
119–128.
S. Porter et al. / Image and Vision Computing 21 (2003) 1097–11061106




![Temporal Segmentation of Group Motion using Gaussian … · Temporal Segmentation of Group Motion using Gaussian Mixture Models [←] •In the first step each individual time segment](https://img.pdfslide.us/doc/110x75/5d141fac88c993b5158cf02d/temporal-segmentation-of-group-motion-using-gaussian-temporal-segmentation-of.jpg)












![Spatio Temporal Segmentation · CHAPTER 5. SPATIO TEMPORAL SEGMENTATION 64 spaces [29, 27]. First, we show that networks with only generalized sparse 3D conv nets can out-perform](https://img.pdfslide.us/doc/110x75/5f1f0ce0bb313c48027ad7e6/spatio-temporal-segmentation-chapter-5-spatio-temporal-segmentation-64-spaces-29.jpg)
![Depth-supported real-time video segmentation with the Kinect · retrieval [1,2,3]. The major challenges faced in video segmentation are processing time, temporal coherence, and robustness](https://img.pdfslide.us/doc/110x75/5fbfe922007d840ee7261fa8/depth-supported-real-time-video-segmentation-with-the-retrieval-123-the-major.jpg)








