Embed Size (px)
Citation preview

COM II Tema 2 (M. Cabrera)
16/09/2009
1
Tema 2: TRANSMISIÓN DIGITAL A TRAVÉS DE CANALES AWGN
COMII
ETSETB-UPC

COM II Tema 2 (M. Cabrera)
16/09/2009
2
Este documento pretende ser una ayuda para el estudio del tema de modulaciones digitales de pulsos de la asignatura COMII de la ETSETB (Plan de Ing. en Telecomunicaciones), UPC. En ningún caso puede sustituir las clases presenciales impartidas por los profesores de la asignatura, sin duda con mayor cantidad de explicaciones y ejemplos que ayudan a entender la materia y evidentemente con todas las ventajas que suponen dichas clases para ambas partes. Así mismo aquí se tratan algunos aspectos de forma muy escueta, por lo que es altamente recomendable ampliar la visión de los mismos en libros de texto más completos y con mayor cantidad de ejercicios, como por ejemplo los referenciados al final del documento. Margarita Cabrera Profesora de Comunicaciones II Dept. TSC ETSETB-UPC Septiembre 2009

COM II Tema 2 (M. Cabrera)
16/09/2009
3
2 Tema 2: Transmisión digital a través de canales AWGN ..................................................................... 1
2.1 Modulaciones de Pulsos (PM Pulse Modulation) ....................................................................... 1 2.1.1 Modulaciones PAM (Pulse Amplitude Modulation) .............................................................. 3 2.1.2 Modulaciones PPM (Pulse Position Modulation) ................................................................... 4 2.1.3 Ejemplo de Señales Biortogonales ......................................................................................... 5 2.1.4 Modulaciones QAM ............................................................................................................... 5
2.2 Representación Geométrica. Espacio de Señal ........................................................................... 6 2.2.1 Base ortonormal ...................................................................................................................... 6 2.2.2 Propiedades y definiciones ..................................................................................................... 6 2.2.3 Representación temporal ........................................................................................................ 7 2.2.4 Energía media ......................................................................................................................... 8 2.2.5 Ejemplos de modulaciones digitales de pulsos rectangulares sobre el espacio de señal......... 8 2.2.6 Búsqueda de base por Gram-Schmidt ................................................................................... 11 2.2.7 Conclusiones de espacio de señal. ........................................................................................ 13
2.3 Receptor óptimo para PM y canal AWGN................................................................................ 14 2.3.1 Equivalencia entre correladores y filtros adaptados. ............................................................ 15 2.3.2 Caracterización estadística del ruido .................................................................................... 17 2.3.3 Detector óptimo: Criterio MAP. ........................................................................................... 19 2.3.4 Elección de las zonas de decisión: ........................................................................................ 22
2.4 BER para PM y canal AWGN .................................................................................................. 25 2.4.1 Demostración de que mediante el criterio MAP se minimiza la Probabilidad de error para PAM (L=1). ........................................................................................................................................ 26 2.4.2 Cálculo de la BER para PAM. .............................................................................................. 27 2.4.3 Cálculo de la BER para PPM................................................................................................ 30 2.4.4 Señales Biortogonales. .......................................................................................................... 32 2.4.5 Señales QAM Cuadradas. ..................................................................................................... 34
2.5 Cotas para la BER ..................................................................................................................... 36 2.5.1 Ejemplo: Señales M-Ortogonales ......................................................................................... 37
2.6 Comparación de Modulaciones PM .......................................................................................... 38 2.6.1 Señales PAM ........................................................................................................................ 38 2.6.2 Comparación 2PPM-2PAM .................................................................................................. 39 2.6.3 Señales M-Ortogonales ......................................................................................................... 40
2.7 Apéndice: Área de la Gaussiana. .............................................................................................. 41 2.8 Ejercicios Propuestos ................................................................................................................ 44
2.8.1 Ejercicio 1: Ortogonalización GS ......................................................................................... 44 2.8.2 Ejercicio 2: MAP y Cálculo de Probabilidad de error. ......................................................... 44 2.8.3 Ejercicio 3: Modulación ortogonal. ...................................................................................... 45
2.9 Referencias Bibliográficas ........................................................................................................ 45 NOTACIÓN DE VARIABLES MATEMÁTICAS: En general se representan los escalares en cursiva y minúscula: a En general se representan los vectores en negrita y minúscula: a En general se representan las matrices en negrita y mayúscula: A

COM II Tema 2 (M. Cabrera)
16/09/2009
1
2 Tema 2: Transmisión digital a través de canales AWGN En este tema se definen y tratan modulaciones digitales formadas por pulsos rectangulares, tanto en banda base como en radiofrecuencia. Se analiza la calidad del sistema a través de la BER (Bit Error Rate o Probabilidad de detección de bits erróneos) cuando las señales se transmiten a través de canales de comunicación ideales de ruido aditivo blanco y gaussiano (AWGN Additive White Gaussian Noise) y el detector es óptimo bajo el criterio de Máxima Probabilidad a Posteriori haber recibido la señal (Criterio MAP). Como herramienta matemática se introduce el apartado de espacio de señal con el objeto de operar con las señales de trabajo representadas mediante vectores.
2.1 Modulaciones de Pulsos (PM Pulse Modulation) En un sistema de comunicaciones digitales, se tomará como punto de partida una secuencia de bits [ ]nb
que se ha de transmitir a la velocidad de br bps. Por tanto el tiempo en media disponible para transmitir
cada bit es el tiempo o periodo de bit: Tb=1/ br . En principio se consideran bits estadísticamente independientes entre sí. Es decir:
[ ]( )[ ]( )
0
1
Pr 0
Pr 1
P b n
P b n
= =
= = 0 1 1P P+ = (2.1)
En general mediante un "mapeo de señal" se codificarán los bits para dar lugar a una secuencia de símbolos. Cada símbolo equivale a la transmisión de una función o señal continua en tiempo. Si los bits se agrupan de "b" en "b" se necesitará un alfabeto de al menos M=2b símbolos distintos.
La secuencia de símbolos resultante se produce a una velocidad de r símbolos/seg. o baudios y el tiempo en media disponible para transmitir cada símbolo es el tiempo o periodo de símbolo: T. Esta velocidad, obviamente se halla relacionada con la velocidad de bit. En las fórmulas que siguen pueden verse las principales relaciones entre los parámetros que hacen referencia a la velocidad, tanto de bits como de símbolos.
1b
b
Tr
= brrb
= 1Tr
= bT bT= (2.2)
Alfabeto de M símbolos
1( )... ( )Ms t s t
010... ( )ms tb bits

COM II Tema 2 (M. Cabrera)
16/09/2009
2
Figura 1 Esquema General de un sistema de comunicaciones digitales. Cualquier Modulación Digital se puede representar como:
( ) ( )mk
s t s t kT+∞
=−∞
= −∑ (2.3)
donde cada señal transmitida en el tiempo ( )ms t pertenece al alfabeto total de señales
{ }1 2( ), ( ),.... ( )Ms t s t s t con probabilidad ( )Pr mS Intuitivamente, la fórmula anterior se interpreta del siguiente modo: Cada “b” bits determinan un símbolo
( )ms t del alfabeto de señales NOTA: Una forma aún más detallada de expresar la señal modulada digitalmente es la siguiente:
[ ]( ) ( )m kn
s t s t kT+∞
=−∞
= −∑ (2.4)
donde en (2.4) el subíndice m se utiliza para indicar el símbolo del alfabeto asignado en el periodo de tiempo correspondiente al símbolo k. En este capítulo en general se prescindirá de la indicación [ ]k con
el objeto de simplificar notación. ( ) [ ]Pr Pr( ( ) ( ))m mm ks t kT s t kT= − = −S
A cada posible señal ( )ms t del alfabeto le denominaremos símbolo y representa un conjunto de "b" bits.
El tamaño del alfabeto (M) se corresponde así con el número de bits/símbolo (b): 2bM = Se define la energía media de símbolo como:
[ ] { }1Pr
M
s m m mm
E E E s E=
= = ∑ con 2 ( )m mE s t dt= ∫ (2.5)
Y la energía media transmitida por bit como:
sb
EEb
= (2.6)
El parámetro bE influye directamente en la calidad del sistema, a través de la probabilidad de error, como se puede ver en apartados posteriores.
MAPEO DE BITS
b[n] rb bps
s(t) r baudios
hc(t) +
w(t)
MAPEO DE SEÑAL
[ ]b n

COM II Tema 2 (M. Cabrera)
16/09/2009
3
A continuación se describen diferentes modulaciones formadas por pulsos rectangulares, a las que en general denominaremos PM (Pulse Modulation).
2.1.1 Modulaciones PAM (Pulse Amplitude Modulation) Mediante PAM se distinguen las modulaciones cuyas funciones símbolo ( )ms t se hallan formadas por
un pulso ( )p t y se diferencian entre sí a través de la amplitud. ( ) ( )m ms t a p t= En este apartado se presentan modulaciones tales que
En una modulación de pulsos en amplitud PAM: / 2( )m m
t Ts t aT
−⎛ ⎞= Π ⎜ ⎟⎝ ⎠
Ver las tablas para M=2 y M=4 niveles
BITS Símbolo m Pr( ( ))ms t ( )ms t
0 1 Po / 2t TAT
−⎛ ⎞− Π ⎜ ⎟⎝ ⎠
1 2 P1 / 2t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
Tabla 1. Mapeo de bits para 2PAM Polar. Probabilidades de bit: P0, P1, con P0+ P1 =1. Para la modulación 2PAM de la Tabla 1 se obtiene 2
b sE E A T= = Los parámetros de amplitud (A volts) y duración de símbolo (T seg.), representan los parámetros físicos de la modulación.
BITS Símbolo m Pr( ( ))ms t ( )ms t
0 1 Po 0
1 2 P1 / 2t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
Tabla 2. Mapeo de bits para 2PAM Uni Polar. Probabilidades de bit: P0, P1, con P0+ P1 =1. Para la modulación 2PAM de la Tabla 2 se obtiene 2
1b sE E P A T= =
BITS Símbolo m Pr( ( ))ms t ( )ms t
0 0 1 Po. Po / 23 t TAT
−⎛ ⎞− Π ⎜ ⎟⎝ ⎠
0 1 2 Po P1 / 2t TA
T−⎛ ⎞− Π ⎜ ⎟
⎝ ⎠
1 1 3 P1 P1 / 2t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
1 0 4 P1 Po / 23 t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
Tabla 3. Mapeo de bits para 4PAM Polar.
COM II Tema 2 (M. Cabrera)
16/09/2009
4
Para la modulación 2PAM de la Tabla 3se obtiene 212 (9 8 )b sE E A T P= = −
Con equiprobabilidad de bits ( 10 1 2P P= = ) se obtiene 25
2bE A T=
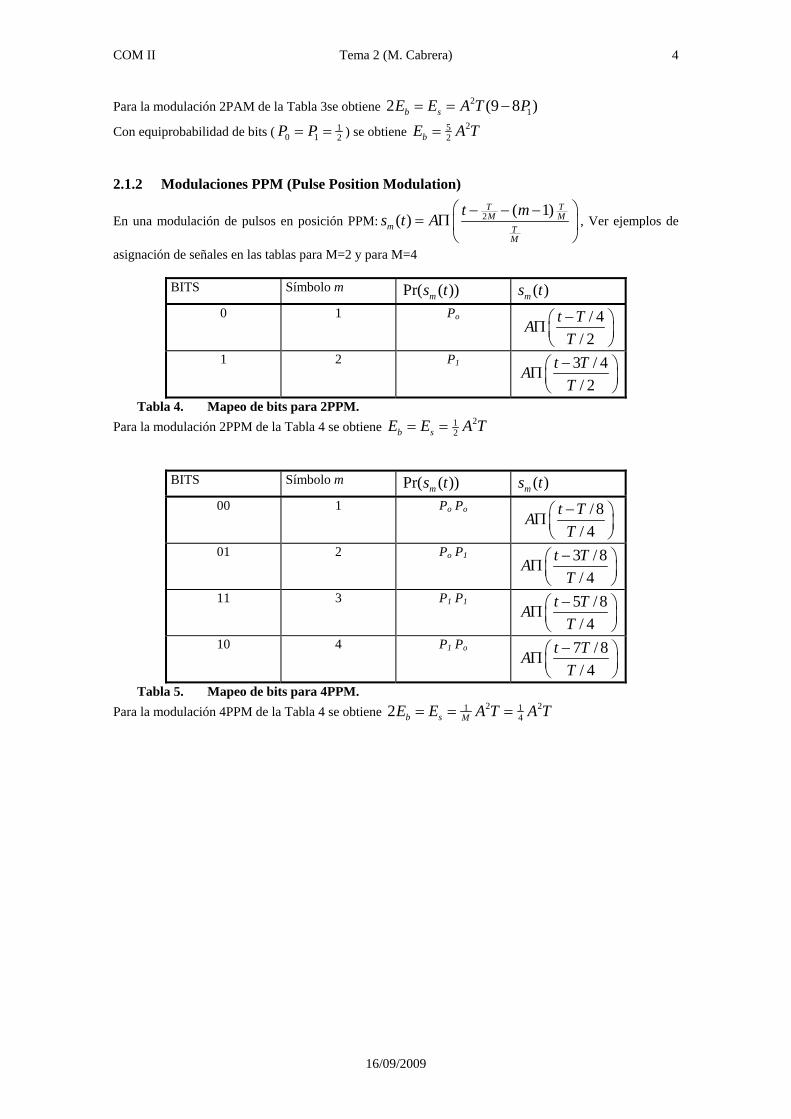
2.1.2 Modulaciones PPM (Pulse Position Modulation)
En una modulación de pulsos en posición PPM: 2 ( 1)( )T TM M
m TM
t ms t A⎛ ⎞− − −
= Π ⎜ ⎟⎝ ⎠
, Ver ejemplos de
asignación de señales en las tablas para M=2 y para M=4
BITS Símbolo m Pr( ( ))ms t ( )ms t
0 1 Po / 4/ 2
t TAT−⎛ ⎞Π ⎜ ⎟
⎝ ⎠
1 2 P1 3 / 4/ 2
t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
Tabla 4. Mapeo de bits para 2PPM. Para la modulación 2PPM de la Tabla 4 se obtiene 21
2b sE E A T= =
BITS Símbolo m Pr( ( ))ms t ( )ms t
00 1 Po Po / 8/ 4
t TAT−⎛ ⎞Π ⎜ ⎟
⎝ ⎠
01 2 Po P1 3 / 8/ 4
t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
11 3 P1 P1 5 / 8/ 4
t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
10 4 P1 Po 7 / 8/ 4
t TAT
−⎛ ⎞Π ⎜ ⎟⎝ ⎠
Tabla 5. Mapeo de bits para 4PPM. Para la modulación 4PPM de la Tabla 4 se obtiene 2 21 1
42 b s ME E A T A T= = =

COM II Tema 2 (M. Cabrera)
16/09/2009
5
2.1.3 Ejemplo de Señales Biortogonales Se denomina así al conjunto de señales que son ortogonales dos a dos. En la siguiente tabla se muestra un caso particular para M=4 señales.
BITS Símbolo m ( ( ))mP s t ( )ms t
00 1 Po Po t
+A
-A TT/2
t+A
-A TT/2
01 2 Po P1 t
+A
T
t+A
T 11 3 P1 P1
t+A
-ATT/2
t+A
-ATT/2
10 4 P1 Po t
-AT
t
-AT
Tabla 6. Ejemplo de mapeo de bits para señales biortogonales y M=4.
Para la modulación del ejemplo de la Tabla 6 se obtiene 22 b sE E A T= =
2.1.4 Modulaciones QAM Las modulaciones QAM son señales paso banda en las que las componentes I&Q a su vez corresponden a modulaciones PAM, por lo que la señal modulada se puede expresar como:
[ ] ( ) ( ) [ ] ( ) ( )( )( ) cos 2 sen 2QAM c c c c c cn
s t I n p t nT A f t Q n p t nT A f tπ ϕ π ϕ+∞
=−∞
= − + − − +∑
Considerando que el cociente cf
T es un número entero positivo, y pulsos ( )p t rectangulares de duración T y normalizados para ser de energía igual a 1, atendiendo a la expresión dada en (2.3), se puede expresar el alfabeto de esta modulación como:
( ) ( ) ( ) ( )( ) cos 2 sen 2m QAM m c c c m c c cs t I p t A f t Q p t A f tπ ϕ π ϕ= + − + En la expresión anterior, cada uno de los 2bM = símbolos, queda determinado por el par de amplitudes ( , )m mI Q . Cálculo de Energía: [ ] 2 2 21
2si 0m m s m m cE I Q E E I Q A T⎡ ⎤= ⇒ = +⎣ ⎦ (2.7)

COM II Tema 2 (M. Cabrera)
16/09/2009
6
2.2 Representación Geométrica. Espacio de Señal En este apartado se va a definir el espacio de señal como un espacio multidimensional en el que mediante vectores se representa cada una de las señales específicas del alfabeto de símbolos o conjunto de señales elegido para transmitir los bits. Para ello se buscará un nuevo conjunto de funciones reales o complejas de energía finita que formen una base ortonormal generadora de las señales a transmitir. Es decir, cualquier señal del alfabeto de símbolos ha de poder expresarse como combinación lineal de las funciones de la base ortonormal.
2.2.1 Base ortonormal Sea el conjunto de funciones { }1 2( ), ( ),... ( )Lt t tϕ ϕ ϕ con L M≤ una base generadora del espacio de
señales{ }1 2( ), ( ),.... ( )Ms t s t s t . La base generadora cumple las propiedades de ortonormalidad:
[ ]*( ) ( )l jt t dt l jϕ ϕ δ+∞
−∞
= −∫ , 1 ,i j L≤ ≤ (2.8)
Así cualquier señal del alfabeto ( )ms t , se puede expresar en función de las funciones ( )l tϕ base generadora:
1
( ) ( )L
m ml ll
s t tα ϕ=
= ∑ (2.9)
donde cada coordenada se puede obtener mediante el producto escalar o proyección de la señal ( )ms t
sobre la función de la base ( )l tϕ .
*( ) ( )ml m ls t t dtα ϕ+∞
−∞
= ∫ (2.10)
* simboliza complejo conjugado, por tanto es relevante cuando se trabaja con señales reales. Una nueva representación del símbolo "m" del alfabeto viene dada a partir del vector formado por las correspondientes coordenadas mlα en la base generadora:
1
2
:
m
mm
mL
αα
α
⎛ ⎞⎜ ⎟⎜ ⎟=⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
s (2.11)
A la representación gráfica de los vectores (para una, dos ó tres dimensiones) se le denominará representación del espacio de señal o constelación de la señal.
2.2.2 Propiedades y definiciones A continuación se revisan algunas de las propiedades y/o definiciones de geometría vectorial euclídea tanto desde la perspectiva de señales como desde la perspectiva de vectores.

COM II Tema 2 (M. Cabrera)
16/09/2009
7
Producto escalar: Energía cruzada entre dos señales del espacio de señal
[ ]
( )
*
* * * *
1 1 1 1
* *
1 1 1
*1
*1
*
( ), ( ) ( ) ( )
( ) ( ) ( ) ( )
: :
mn m n m n
L L L L
ml l nk k ml nk l kl k l k
L L L
ml nk ml nll k l
n
m mL m n
nL
E s t s t s t s t dt
t t dt t t dt
l k
α ϕ α ϕ α α ϕ ϕ
α α δ α α
αα α
α
+∞
−∞
+∞ +∞
= = = =−∞ −∞
= = =
= = =
= =
− = =
⎛ ⎞⎜ ⎟
=⎜ ⎟⎜ ⎟⎝ ⎠
∫
∑ ∑ ∑ ∑∫ ∫
∑ ∑ ∑
Ts s
(2.12)
Norma de un vector o señal: Energía Es un caso particular de la expresión (2.12)
* *
1
2*
( ), ( )
m m
L
m m m ml mll
m
E s t s t α α=
= = =
=
∑Ts s s
(2.13)
Distancia al cuadrado entre dos señales del espacio de señal
22
2
( ) ( ), ( ) ( ) ( ) ( )
2
mn m n m n m n
m n m n mn
d s t s t s t s t s t s t dt
E E E
+∞
−∞
= − − = − =
− = + −
∫s s
(2.14)
Condición de Ortogonalidad entre señales o vectores
* *( ) ( ) 0mn m n m nE s t s t dt+∞
−∞
= = =∫Ts s (2.15)
2.2.3 Representación temporal Se revisa en esta sección la representación de la señal en (2.3) aprovechando la nomenclatura vectorial. Al expresar cada una de las funciones del espacio de señal se obtiene la siguiente correspondencia entre dominio temporal y espacio vectorial:
1
( ) ( )L
m ml ll
s t tα ϕ=
= ∑
1
2
:
m
mm
mL
αα
α
⎛ ⎞⎜ ⎟⎜ ⎟=⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
s

COM II Tema 2 (M. Cabrera)
16/09/2009
8
La expresión anterior corresponde al símbolo transmitido en 0 t T≤ ≤ . Al considerar la dependencia temporal, para el símbolo k-ésimo a transmitir se tendrá
[ ]1
( ) ( )L
m ml ll
s t kT k t kTα ϕ=
− = −∑ [ ]
[ ][ ]
[ ]
1
2
:
m
mm
mL
kk
k
k
αα
α
⎛ ⎞⎜ ⎟⎜ ⎟= ⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠
s
Y por tanto la expresión definitiva es:
[ ]1
( ) ( ) ( )L
m ml lk k l
s t s t kT k t kTα ϕ+∞ +∞
=−∞ =−∞ =
= − = −∑ ∑ ∑ (2.16)
2.2.4 Energía media La expresión para la energía media definida en (2.5) se expresa a partir de los vectores de señal.
[ ] { } { } 2
1 1Pr Pr
M M
s m m m m mm m
E E E s E s= =
= = =∑ ∑ s (2.17)
En general, interesa dar este parámetro en función de la mínima distancia entre dos símbolos que se tiene en el espacio de señal.
2.2.5 Ejemplos de modulaciones digitales de pulsos rectangulares sobre el espacio de señal
En esta sección se retoman los ejemplos vistos para PAM, PPM y señales biortogonales y se analizan mediante su representación vectorial. Las coordenadas de los diferentes vectores, se expresan en función de parámetros físicos, o de distancia mínima entre símbolos d, o de Energía media de bit. bE Aunque las 3 expresiones son equivalentes, las dos últimas son de utilidad en apartados posteriores de cara a la evaluación de la probabilidad de error. Modulaciones 2PAM Base ortonormal: ( )/ 21
1( ) t TTT
tϕ −= Π ; L=1
Vectores del espacio de señal: Con distancia entre símbolos 12d d= ; 21
4s bE E d= =
( )1 2
2 1 2
db
db
A T E
E
= = =
= − = − = −
s
s s
El parámetro d, representa la distancia mínima entre dos símbolos en su representación geométrica. Evidentemente se halla relacionado con los parámetros físicos de amplitud y duración de símbolo (A,T). En general en este capítulo se relaciona con la energía media de bit Eb, y se utiliza como parámetro de referencia respecto al cual se calculan todas las coordenadas de los vectores del espacio de señal.
1s2s 1α
d

COM II Tema 2 (M. Cabrera)
16/09/2009
9
Modulaciones 4PAM (bits equiprobables) Base ortonormal: ( )/ 21
1( ) t TTT
tϕ −= Π ; L=1
Vectores del espacio de señal: (Con distancia mínima entre símbolos d)
2 25 54 8; s bE d E d= =
( ) 3 184 1 2 5
23 2 2 5
3 b
db
A T d E
E
= − = = =
= − = =
s s
s s
Modulaciones MPAM (bits equiprobables) Base ortonormal: ( )/ 21
1( ) t TTT
tϕ −= Π ; L=1
Vectores del espacio de señal: Con distancia mínima entre símbolos d
2 22 1 1212
2 ( 1) ( 1)
1..
m M bm s bM M
d E E
m M
− −− −
= = =
=
s
( ) 2 22 2 22 1 1 12 12 12
1
; sM
Em M M Ms b b b
m
E d d E d− − − −
=
= = = =∑
NOTA: En el cálculo anterior se ha utilizado: ( 1)2
1
NN N
nn +
=
=∑ ; ( 1)(2 1)26
1
NN N N
nn + +
=
=∑
Modulaciones 2PPM Base ortonormal: ( )/ 41
1 / 2/ 2( ) t T
TTtϕ −= Π ( )3 / 41
2 / 2/ 2( ) t T
TTtϕ −= Π ; L=2
Vectores del espacio de señal: Con distancia entre símbolos 12d d= ; 21
2s bE E d= =
1s 2s 1α
d
3s 4s
1s
2s
1α
d
2α

COM II Tema 2 (M. Cabrera)
16/09/2009
10
221
222
00 0
0 00
dTb
dTb
EA
A E
⎛ ⎞⎛ ⎞ ⎛ ⎞= = =⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠⎝ ⎠ ⎝ ⎠⎛ ⎞ ⎛ ⎞⎛ ⎞
= = =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠ ⎝ ⎠⎝ ⎠
s
s
Modulaciones Biortogonales Base ortonormal: ( )/ 41
1 / 2/ 2( ) t T
TTtϕ −= Π ( )3 / 41
2 / 2/ 2( ) t T
TTtϕ −= Π ; L=2
Vectores del espacio de señal. Con distancia mínima d; 21
22s bE E d= =
2 21 3
22
2 22 4
22
T db
dTb
T db
dTb
A E
EA
A E
EA
⎛ ⎞ ⎛ ⎞⎛ ⎞⎜ ⎟ ⎜ ⎟= − = = =⎜ ⎟ ⎜ ⎟⎜ ⎟ − −− ⎝ ⎠ ⎝ ⎠⎝ ⎠⎛ ⎞ ⎛ ⎞⎛ ⎞⎜ ⎟ ⎜ ⎟= − = = =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠ ⎝ ⎠⎝ ⎠
s s
s s
Modulaciones QAM El espacio de señal resultante es dimensión L=2. Las dos funciones generadoras trabajando con pulsos rectangulares según se ha definido en 2.1.4 resultan.
( ) ( ) ( ) ( )( )/ 21
( ) 2 cos 2 ; ( ) 2 sen 2
( ) ; ; 0i c c q c c
t Tc cTT
t p t f t t p t f t
p t T NT
ϕ π θ ϕ π θ
θ−
= + + = − +
= Π = =
1s
2s
1α
d
2α
4s
3s

COM II Tema 2 (M. Cabrera)
16/09/2009
11
Figura 2 Ejemplo de funciones ( ), ( )i qt tϕ ϕ . El eje temporal se halla normalizado al tiempo de símbolo para un ejemplo de N=5. En estas condiciones la señal QAM expresada queda expresada mediante las funciones dadas:
[ ] ( ) [ ] ( )( )( ) i i q qn
s t n t nT n t nTα ϕ α ϕ+∞
=−∞
= − + −∑ (18)
con [ ] [ ] [ ] [ ]2 2
c cA Ai qn I n n Q nα α= =
2.2.6 Búsqueda de base por Gram-Schmidt En general, se puede hallar la base ortonormal generadora { }1 2( ), ( ),... ( )Lt t tϕ ϕ ϕ a partir de la
observación de las señales { }1 2( ), ( ),..., ( )Ms t s t s t . Cuando no se encuentra directamente la base, a partir de esta observación, se ha de aplicar algún método sistemático, como por ejemplo el que se explica en esta sección para señales reales: Sea el espacio de señal:{ }1 2( ), ( ),..., ( )Ms t s t s t . A partir del mismo se obtendrá la base de funciones,
{ }1 2( ), ( ),... ( )Lt t tϕ ϕ ϕ con L M≤ que lo genera aplicando la siguiente metodología:
• Obtención de la función 1( )tϕ a partir de la normalización de la primera señal 1( )s t
11
1
( )( ) s ttE
ϕ = (2.19)
• Obtención de la función 2 ( )tϕ restando a la señal 2 ( )s t su proyección sobre 1( )tϕ y normalizando.
2
2 2 2 1 1
22
( ) ( ) ( ), ( ) ( )( )( )
t s t s t t ttt
Eψ
ψ ϕ ϕψϕ
= −
= (2.20)

COM II Tema 2 (M. Cabrera)
16/09/2009
12
• Y en general: Obtención de la función ( )l tϕ restando a la señal ( )ls t su proyección sobre
{ }1 2 1( ), ( ),... ( )lt t tϕ ϕ ϕ − y normalizando
1
1( ) ( ) ( ), ( ) ( )
( )( )l
l
l l l k kk
ll
t s t s t t t
ttEψ
ψ ϕ ϕ
ψϕ
−
=
= −
=
∑ (2.21)
Si la dimensión del espacio de señal es <M, en alguno de los pasos anteriores se obtiene ( ) 0l tψ = y no
se genera la correspondiente función ( ) 0l tϕ = , reduciendo de este modo la dimensión de la base respecto al espacio de señal. Ejemplo de aplicación para modulaciones Biortogonales Obtención de la función 1( )tϕ :
( ) ( )1
/ 4 3 / 41 1 11 1 / 2 / 2( ) ( ) t T t T
T TE T Tt s tϕ − −= = Π − Π
Obtención de la función 2 ( )tϕ :
2 2 2 1 1 2( ) ( ) ( ), ( ) ( ) ( )t s t s t t t s tψ ϕ ϕ= − = ( )/ 212 ( ) t T
TTtϕ −= ∏
Aunque se intenten encontrar más funciones a partir de este punto, se anulan:
3 3 3 1 1 3 2 2( ) ( ) ( ), ( ) ( ) ( ), ( ) ( ) 0t s t s t t t s t t tψ ϕ ϕ ϕ ϕ= − − =
4 4 4 1 1 4 2 2( ) ( ) ( ), ( ) ( ) ( ), ( ) ( ) 0t s t s t t t s t t tψ ϕ ϕ ϕ ϕ= − − =
Vectores del espacio de señal. Con distancia mínima d; 21
22s bE E d= =
21 3
2 42
200
00
2
db
db
E
E
⎛ ⎞ ⎛ ⎞= − = =⎜ ⎟ ⎜ ⎟⎜ ⎟
⎝ ⎠⎝ ⎠⎛ ⎞⎛ ⎞
= − = = ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
s s
s s
1s
2s
1α
d
2α3s
4s

COM II Tema 2 (M. Cabrera)
16/09/2009
13
Comparando este ejemplo con el del apartado 2.2.5 puede observarse que en general la base ortornormal generadora no es única ni la representación geométrica, pero sí la energía media de símbolo sE , la
energía media de bit bE y las distancias entre símbolos.
2.2.7 Conclusiones de espacio de señal. La expresión de las señales del alfabeto en forma vectorial utilizando una base ortonormal del funciones generadoras, presenta las siguientes ventajas, siempre que la dimensión L sea menor que el número de señales M Facilita el cálculo de la probabilidad de error Simplifica el diseño del detector MAP.

COM II Tema 2 (M. Cabrera)
16/09/2009
14
2.3 Receptor óptimo para PM y canal AWGN El diseño del receptor se plantea a partir de las expresiones vectoriales de la señal. En la Figura 3 se representa el receptor óptimo MAP basado en la representación de señal mediante la base generadora:
)(ts)(thc +
)(tr
)(tw
)(1 ty
)(tyL
Det.
MAP
[ ]ks1
* ( )tϕ
( ).T∫⊗
*( )l tϕ
( ).T∫⊗
)(ts)(thc ++
)(tr
)(tw
)(1 ty
)(tyL
Det.
MAP
[ ]ks1
* ( )tϕ
( ).T∫⊗
1
* ( )tϕ
( ).T∫⊗
*( )l tϕ
( ).T∫⊗
Figura 3 Sistema Receptor de comunicaciones digitales. Proyector sobre espacio de señal basado en correladores y Detector MAP.
En el resto del capítulo se considerarán únicamente señales reales
La señal de ruido ( )w t se considera proceso aleatorio estacionario real blanco y Gaussiano. Así su función de correlación y su función de densidad espectral son:
( ) ( )0
0
2
2( )
Nw
Nw
R
S f
τ δ τ=
= (2.22)
En la Figura 4, se muestra la representación Vectorial del mismo, para el caso en que el canal sea AWGN y que por tanto ( ) ( )ch t tδ= .
+[ ]kr
[ ] [ ] [ ]kkk ++= nnw
Proy.
Espacio
Señal
[ ]ks [ ] [ ] [ ]kkk nsy += Det.
MAP
[ ]ks
Figura 4 Representación Vectorial del receptor MAP para el caso de canal AWGN.

COM II Tema 2 (M. Cabrera)
16/09/2009
15
En la representación anterior, las coordenadas del vector a la salida del proyector coinciden con las muestras de las diferentes salidas de los correladores de la Figura 3. Al proyectar la señal de ruido sobre el espacio de señal, se eliminará el ruido ortogonal ( ( )n t+ ) al espacio de señal. En el dominio temporal este proceso puede expresarse como:
1
( ) ( ) ( ) ( ), ( ) ( ) ( )L
l ll
w t n t n t w t t t n tϕ ϕ+ +
=
= + = +∑ (2.23)
Denominando:
[ ][ ]
0( ) 0 ( ), ( )
( ) ( ), ( )l l l
l k l l
t w t t
t k w t t kT
β β ϕ
β β ϕ
= =
= = −
El ruido resultante a la salida del proyector de señal, para el instante de muestreo correspondiente al símbolo k-ésimo es por tanto:
( ) [ ]1
( )L
k l ll
n t k tβ ϕ=
= ∑ (2.24)
[ ] [ ] ( )
[ ][ ]
[ ]
[ ] [ ]1 11
2 22
( ) ( )( ) ( )
( ): ::( ) ( )
k k
k kk k
L k L kL
y t tky t tk
t k k t k k
y t tk
βαβα
βα
⎛ ⎞⎛ ⎞ ⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟= = = + = + = +⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠
y y s n s n (2.25)
El vector a la entrada del detector MAP, se halla formado por el vector de señal transmitido más el vector de ruido aditivo. Cada coordenada se divide a su vez en coordenada de señal útil y coordenada de ruido. [ ] [ ] ( )( )l k l l l ky t y k k tα β= = + (2.26) Todos los vectores que intervienen en (2.25) son variables aleatorias multidimensionales. La señal útil es una variable aleatoria discreta ms , caracterizada por las probabilidades a priori: { }Pr ms . El vector de ruido n, es una variable aleatoria multidimensional gaussiana. Sus parametros estadísticos se estudian en 2.3.2. El vector de señal recibida [ ]ky es también una variable aleatoria multidimensional.
2.3.1 Equivalencia entre correladores y filtros adaptados. Al transmitir pulsos de forma continuada la señal transmitida se describe como (2.16):
( ) ( )mk
s t s t kT+∞
=−∞
= −∑
con lo cual, cada una de las coordenadas del vector de señal recibido, se puede expresar en función del tiempo como: (( 1) ) ( ) ( ) ( ) ( ( ) ( )) ( )l l l lt nT
y n T y t r nT d s w nT dτ ϕ τ τ τ τ ϕ τ τ=
+ = = − = + −∫ ∫ (2.27)

COM II Tema 2 (M. Cabrera)
16/09/2009
16
La integral anterior, demuestra que cada correlador del esquema propuesto para el receptor óptimo es equivalente a un sistema lineal e invariante con el tiempo de respuesta impulsional: ( )l Tϕ τ− . La equivalencia entre ambos sistemas queda representada en la Figura 5.
( )l t nTϕ −
( 1)
(.)n T
nT
+
∫⊗ (( 1) )ly n T+( )r t
( 1)nt n T= +
( )l t nTϕ −
( 1)
(.)n T
nT
+
∫⊗ (( 1) )ly n T+( )r t
( 1)nt n T= +
( )ly t( )l T tϕ − ( )l ny t
( )r t
( 1)nt n T= +
( )ly t( )l T tϕ − ( )l ny t
( )r t
( 1)nt n T= +
Figura 5 Equivalencia entre correlador y filtro adaptado (FA) a partir de la función de la base generadora ( )l tϕ Obsérvese que a la salida del correlador se obtiene la siguiente expresión:
( 1)
(( 1) ) ( ) ( )n T
l lnT
y n T r nT dτ ϕ τ τ+
+ = −∫ (2.28)
Y a la salida del filtro adaptado (FA) se obtiene:
( ) ( )* ( ) ( ) ( ( )) ( ) ( ) ;l l lz t r t T t r T t d r t T dϕ τ ϕ τ τ τ ϕ τ τ+∞ +∞
−∞ −∞
= − = − − = − +∫ ∫
Al muestrear en ( 1)t n T= + se obtiene:
( 1)
( 1)
( ) ( ) ( ( 1) )
( ) ( ) ( ) ( ) (( 1) )
lt n T
n T
l l lnT
z t r n T T d
r nT d r nT d y n T
τ ϕ τ τ
τ ϕ τ τ τ ϕ τ τ
+∞
= +−∞
++∞
−∞
= − + + =
− = − = +
∫
∫ ∫ (2.29)
Por tanto, el esquema del proyector sobre el espacio de señal de la Figura 3 se puede representar a partir de sistemas lineales e invariantes cuya respuesta impulsional es FA a las funciones de la base generadora según el esquema de la Figura 6.
( )s t( )ch t
( )r t
( )w t
1( )T tϕ −
2( )T tϕ −
( )L T tϕ −
1( )y t
( )Ly t
2 ( )y t
Det. MAP
[ ]ˆ ks
k dt kT t= +
1( )ky t
2 ( )ky t
( )L ky t
⊕

COM II Tema 2 (M. Cabrera)
16/09/2009
17
Figura 6 Sistema Receptor de comunicaciones digitales. Proyector sobre espacio de señal basado en FA y Detector MAP. Siguiendo con el desarrollo se obtiene una expresión para la dependencia temporal del vector de señal recibido:
[ ]( )l ly nT y n= = ( ) ( ) ( )m l lk
s kT nT d nTτ ϕ τ τ β+∞
=−∞
− − + =∑∫
[ ]1
( ) ( ) ( )L
mj j l lk j
k kT nT d nTα ϕ τ ϕ τ τ β+∞
=−∞ =
− − + =∑ ∑ ∫ (2.30)
[ ]1
(( ) ) ( )j l
L
mj lk j
k R n k T nTϕ ϕα β+∞
=−∞ =
− +∑ ∑
En la ecuación anterior se ha utilizado la definición de correlación cruzada de señales deterministas de energía finita, en este caso las propias funciones de la base generadora son señales deterministas de energía finita. ( ) ( ) ( )
j l j lR dϕ ϕ τ ϕ λ τ ϕ λ λ= +∫
Asumiendo que [ ] [ ](( ) )
j iR n k T i j n kϕ ϕ δ δ− = − − , propiedad evidente para modulaciones de
pulsos rectangulares, se obtiene
[ ] [ ] [ ]1 l ly n n nα β= + es decir:
[ ][ ]
[ ][ ] [ ]
1
: m
L
y nn n n
y n
⎛ ⎞⎜ ⎟= = +⎜ ⎟⎜ ⎟⎝ ⎠
y s n (2.31)
En el tema 3, la ecuación (2.31) se generaliza para el caso de canales no ideales.
2.3.2 Caracterización estadística del ruido En este apartado se caracterizan las coordenadas de los vectores de ruido resultantes de la proyección sobre el espacio de señal (PES). Es obvio que la caracterización no depende de si la PES se realiza con correladores o con FA. Las muestras de ruido son idénticas para ambas situaciones. En el desarrollo se modela el ruido de canal ( )w t como estacionario, de media nula, estadísticamente independiente a la señal modulada blanco y gaussiano. Correlación y densidad espectral se muestran en (2.22). La coordenada de ruido para el símbolo k-ésimo en (2.26) presenta las siguientes propiedades estadísticas.
[ ]( 1)
( ) ( ) ( ) ( )k T
l l lkT
k w t t kT dt w t t kT dtβ ϕ ϕ+ +∞
−∞
= − = −∫ ∫ (2.32)

COM II Tema 2 (M. Cabrera)
16/09/2009
18
Momentos estadísticos de primer orden:
[ ] [ ]( ) ( ) ( ) ( ) 0l l lE E w t t kT dt E w t t kT dtβ ϕ ϕ+∞ +∞
−∞ −∞
⎡ ⎤= − = − =⎢ ⎥
⎣ ⎦∫ ∫ (2.33)
Momentos estadísticos de segundo orden:
[ ] [ ]
[ ]
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
l j
l j
l j
E k m
E w t t kT dt w mT d
E w t w t kT mT dtd
β β
ϕ λ ϕ λ λ
λ ϕ ϕ λ λ
+∞ +∞
−∞ −∞
+∞ +∞
−∞ −∞
⎡ ⎤ =⎣ ⎦⎡ ⎤
− − =⎢ ⎥⎣ ⎦
− − =
∫ ∫
∫ ∫
( )
( )
( )
0
0
0
2
2
2
( ) ( )
( ) ( )
( ) ( )
( ) ( )
w l j
Nl j
Nl j
Nl j
R t t kT mT dtd
t t kT mT dtd
t t kT dt mT d
kT mT d
λ ϕ ϕ λ λ
δ λ ϕ ϕ λ λ
δ λ ϕ ϕ λ λ
ϕ λ ϕ λ λ
+∞ +∞
−∞ −∞
+∞ +∞
−∞ −∞
+∞ +∞
−∞ −∞
+∞
−∞
− − − =
− − − =
− − − =
− − =
∫ ∫
∫ ∫
∫ ∫
∫
0 02 2( ) ( ) (( ) )
l j
N Nl jmT kT d R m k Tϕ ϕϕ γ ϕ γ γ
+∞
−∞
+ − = −∫
[ ] [ ] [ ] [ ]0 0
2 2(( ) )l j
N Nl jE k m R m k T k m l jϕ ϕβ β δ δ⎡ ⎤ = − = − −⎣ ⎦ (2.34)
En (2.34) se aplica la siguiente propiedad para las funciones de la base generadora: [ ] [ ] [ ]( )
l j l jR nT R n n l jϕ ϕ ϕ ϕ δ δ= = −
Para n=0, la propiedad sale directamente de la condición de ortonormalidad (2.8). Para n<>0 la propiedad es obvia si las funciones de la base generadora son de duración menor o igual al tiempo de símbolo T. En el tema siguiente se verán funciones cuya duración es mayor a la del tiempo de símbolo y que cumplen la condición exigida. Nota: En el resto del capítulo se prescinde de la notación con dependencia temporal, la cual se retomará en
el próximo tema:
Las coordenadas de ruido, son estacionarias y por tanto la f.d.p. del vector de ruido no depende de k. Para simplificar por tanto la nomenclatura:
[ ] [ ] [ ] [ ]; ; ;m m l lk k k kβ β= = = =s s y y n n

COM II Tema 2 (M. Cabrera)
16/09/2009
19
Cálculo de la f.d.p. del vector de ruido. De (2.34) se deduce que dos coordenadas de ruido diferentes entre sí son incorreladas y por ser gaussianas también estadísticamente independientes. Así las funciones de densidad de probabilidad (f.d.p.) correspondientes, son distribuciones normales.
02 22: (0, ); N
l Nβ σ σ =
( ) ( )2 2
2 00
1 1 122
( ) exp expl l
l l NNf β β
β πσ πσβ = − = − (2.35)
Debido a la independencia estadística entre las variables aleatorias de ruido 1 2, ,.. Lβ β β , la f.d.p. conjunta, correspondiente a la f.d.p. del vector de ruido, puede expresarse como:
( ) ( )
( ) ( )
1 2
22
1
0 00 0
2
/ 2 00
, ,.. 1 21
1 1
1
1
( ) ( , ,.. ) ( )
exp exp
exp
L l
L
ll l
L
L
L
L ll
L
N NN Nl
NN
f f fβ β β β
ββ
π π
π
β β β β
=
=
=
= = =
⎛ ⎞∑⎜ ⎟− = − =⎜ ⎟⎝ ⎠
−
∏
∏
n
n
n
(2.36)
En esta situación diremos que la distribución del vector de ruido es gaussiana multidimensional:
( )020, NN=n I
2.3.3 Detector óptimo: Criterio MAP. Criterio MAP. Maximizamos la probabilidad del símbolo ms a “posteriori”, es decir, una vez recibido el vector de señal y. Por tanto la función a maximizar es:
( ) ( )( ) ( )Pr Prm
m m
ff
= y
y
y ss y s
y (2.37)
A la salida del detector MAP de la Figura 3 y de la Figura 4 se detecta el símbolo ˆms que maximiza la función (2.37), por tanto, un modo de obtenerlo es evaluando dicha función para m=1,..,M. El desarrollo que sigue muestra nuevas expresiones para dicho detector. La f.d.p. del vector recibido y condicionada por el símbolo ms se expresa a partir de la f.d.p. del vector
de ruido n (2.36). Dado que m m= +y s s n , se entiende que una vez seleccionada la condición de que el
símbolo transmitido es ms , el vector de datos detectado es igual al vector aleatorio de ruido, más un valor
determinado ms , es decir, más un vector determinista, por ello las f.d.p. de y y de n coinciden salvo en media.

COM II Tema 2 (M. Cabrera)
16/09/2009
20
( ) ( ) ( ) ( )2
/ 2 00
1 exp mL
m m m NNf f
π
−= − = − y sny s y s y s (2.38)
y sustituyendo en (2.37) se obtiene la siguiente regla de decisión:
( )( ) ( ) ( ) ( )( )2
/ 2 00
1ˆ max Pr max exp PrmLm mm MAP m mNNπ
−− = = − y s
s ss s y s (2.39)
Dado que la función a maximizar es positiva para cualquier valor de y y de ms , su maximización es equivalente a maximizar su logaritmo, por ser la función logaritmo monótona creciente, por tanto:
( ) ( )( )( )2
002ˆ max ln ln Prm
m
Lm MAP mNNπ −
− = − − +y sss s
donde pueden eliminarse los términos que no dependen de ms :
( )( )( )2
0ˆ min ln Prm
mm MAP mN−
− = −y sss s (2.40)
Por tanto, con el vector de señal recibido y, la función anterior debe ser evaluada para cada símbolo posible del alfabeto ms , con el objeto de decidir él que nos de un valor mínimo de la función (2.40). Observaciones:
• Si el entorno es muy ruidoso ( 0N valor muy elevado), el criterio MAP conduce a elegir el símbolo más probable.
• Si los símbolos son equiprobables: ( ) 1Pr m M=s , la probabilidad a priori de cada símbolo no depende de “m”, y el criterio MAP, se reduce a un criterio de mínima distancia euclídea:
( )2ˆ minmm MAP m− = −ss y s
Al desarrollar la ecuación (2.40) se obtiene:
2 2 2 2 ,m m m− = + −y s y s y s =2 2 ( ) ( )m mE y t s t dt+ − ∫y (2.41)
Por tanto y prescindiendo de los términos que no dependen del símbolo “m-ésimo”, una nueva expresión para la función a optimizar es:
( )( )( )
( )( )( )0
0
2 2
2 2
ˆ max ( ), ( ) ln Pr
max ( ) ( ) ln Pr
m
m
m
m
E Nm MAP m m
E Nm m
y t s t
y t s t dt
− = − + =
− +∫s
s
s s
s (2.42)

COM II Tema 2 (M. Cabrera)
16/09/2009
21
Para el diseño del detector MAP sobre canales de ruido aditivo gaussiano, por tanto, es de interés en el cálculo de zonas de decisión tener presentes cualquiera de las siguientes expresiones y aplicar en cada caso la más conveniente:
( )( )( )( )( )( )0
20
2 2
ˆ
min ln Pr
max , ln Pr
m
m
m
m MAP
m m
E Nm m
N− =
− − =
− +
s
s
s
y s s
y s s
(2.43)
Para constelaciones con energía igual para todos los símbolos y/o símbolos equiprobables, se podrán realizar las correspondientes simplificaciones. A continuación se presentan dos diagramas de bloques diferenciados (aunque equivalentes) para el receptor óptimo (MAP) según se desarrolle la ecuación (2.41) o la ecuación (2.42).
• Estructura 1 (Figura 7): Banco de L correladores o L filtros adaptados, ecuación (2.41). Interesa si L<M, dado que se reduce el número de correladores a implementar y por lo tanto el hardware del receptor se simplifica respecto al diagrama de la segunda estructura.
• Estructura 2 (Figura 8): Banco de M correladores o M filtros adaptados, ecuación(2.42). Interesa
si L=M, dado que no se reduce el número de correladores a implementar o hardware respecto a la estructura 1.
)(ts)(thc +
)(tr
)(tw
)(1 ty
)(tyL
[ ]ˆm ks1
* ( )tϕ
( ).T∫⊗
* ( )l tϕ
( ).T∫⊗
2
minm
m−
s
y s)(ts
)(thc ++)(tr
)(tw
)(1 ty
)(tyL
[ ]ˆm ks1
* ( )tϕ
( ).T∫⊗
1
* ( )tϕ
( ).T∫⊗
* ( )l tϕ
( ).T∫⊗
2
minm
m−
s
y s
Figura 7 RO-MAP. Banco de L correladores o L filtros adaptados. Símbolos equiprobables.
COM II Tema 2 (M. Cabrera)
16/09/2009
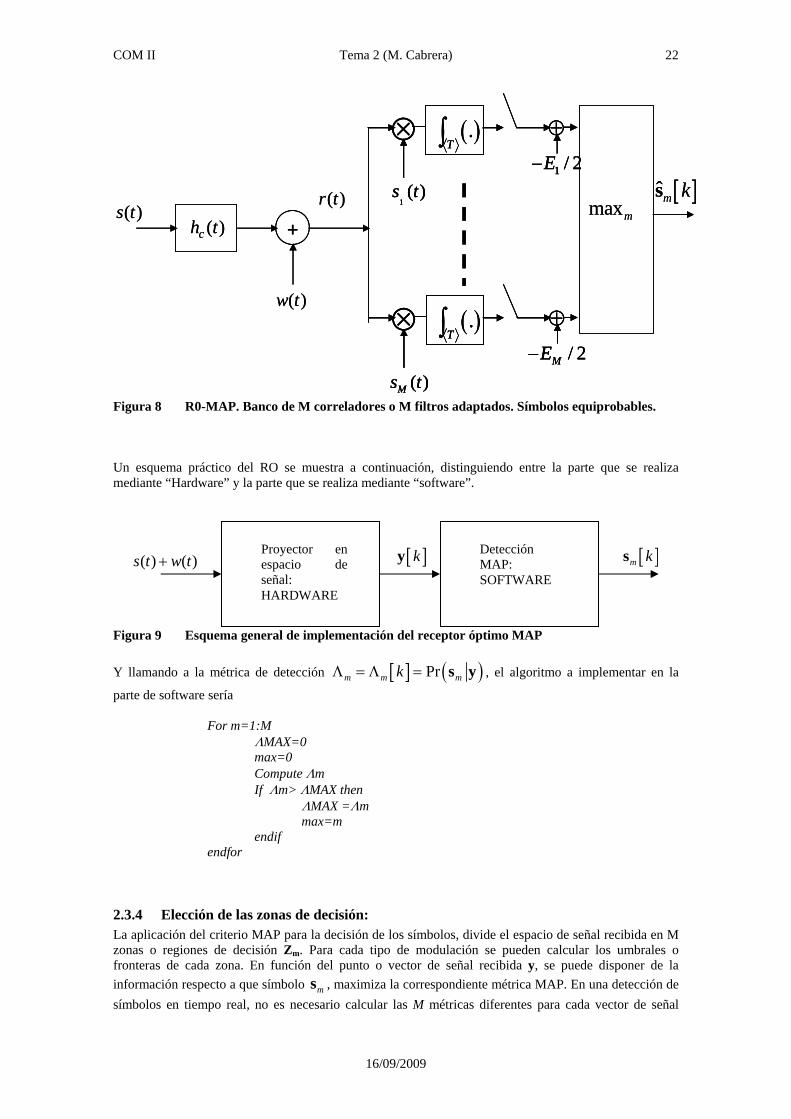
22
)(ts)(thc +
)(tr
)(tw
[ ]ˆm ksmaxm
1( )s t
( ).T∫⊗ ⊕
1 / 2E−
( )Ms t
( ).T∫⊗ ⊕
/ 2ME−
)(ts)(thc ++
)(tr
)(tw
[ ]ˆm ksmaxm
1( )s t
( ).T∫⊗ ⊕
1 / 2E−
1( )s t
( ).T∫⊗ ⊕
1 / 2E−
( )Ms t
( ).T∫⊗ ⊕
/ 2ME−( )Ms t
( ).T∫⊗ ⊕
/ 2ME−
Figura 8 R0-MAP. Banco de M correladores o M filtros adaptados. Símbolos equiprobables. Un esquema práctico del RO se muestra a continuación, distinguiendo entre la parte que se realiza mediante “Hardware” y la parte que se realiza mediante “software”.
Figura 9 Esquema general de implementación del receptor óptimo MAP Y llamando a la métrica de detección [ ] ( )Prm m mkΛ = Λ = s y , el algoritmo a implementar en la
parte de software sería
For m=1:M ΛMAX=0 max=0 Compute Λm If Λm> ΛMAX then
ΛMAX =Λm max=m
endif endfor
2.3.4 Elección de las zonas de decisión: La aplicación del criterio MAP para la decisión de los símbolos, divide el espacio de señal recibida en M zonas o regiones de decisión Zm. Para cada tipo de modulación se pueden calcular los umbrales o fronteras de cada zona. En función del punto o vector de señal recibida y, se puede disponer de la información respecto a que símbolo ms , maximiza la correspondiente métrica MAP. En una detección de símbolos en tiempo real, no es necesario calcular las M métricas diferentes para cada vector de señal
Proyector en espacio de señal: HARDWARE
Detección MAP: SOFTWARE
[ ]m ks[ ]ky( ) ( )s t w t+

COM II Tema 2 (M. Cabrera)
16/09/2009
23
recibida, sino que automáticamente, en función de la zona de decisión en la que se haya detectado este vector y, se producirá la estimación del correspondiente símbolo. El algoritmo descrito en la Figura 9 se simplifica por ello del siguiente modo:
For m=1:M If Y[K]is in Zm then
max=m goto STOP
endif endfor STOP
Véanse a continuación 2 ejemplos de cálculo de zonas de decisión. Ejemplo 1: 2PAM En 2PAM se tienen dos símbolos de igual energía, la función a minimizar se reduce a:
( )( )( )02ˆ max ( ), ( ) ln Pr
m
Nm MAP m my t s t− = +ss s
Bajo la hipótesis 2m bE= = −s s 2 1, by E= −y s
Bajo la hipótesis 1m bE= = +s s 1 1, by E= +y s Por tanto el criterio de decisión se traduce en:
( ) ( )1
0 0
2
1 1 1 02 2ln lnN Nb by E P y E P
>+ + − +
<
s
s
( )1
0 0
1
2
1 4ln
b
N PPE
y γ>
=<
s
s
El umbral de decisión γ , divide el espacio de señal recibida en dos zonas de decisión: Z1 yZ2. Ejemplo 2: Señales Biortogonales: M=4 Vectores de señal útil y probabilidades:
( ) 21 1 0
2 ; Pr0
bE P⎛ ⎞
= =⎜ ⎟⎝ ⎠
s s
( )2 2 1 0
0; Pr
2 b
PPE
⎛ ⎞= =⎜ ⎟⎜ ⎟
⎝ ⎠s s
( ) 23 3 1
2 ; Pr0
bE P⎛ ⎞
= − =⎜ ⎟⎝ ⎠
s s
( )4 4 0 1
0; Pr
2 b
P PE
⎛ ⎞= − =⎜ ⎟⎜ ⎟
⎝ ⎠s s
Cálculo del umbral o frontera entre 1 2;s s De la ecuación (2.42):

COM II Tema 2 (M. Cabrera)
16/09/2009
24
( ) ( ) ( ) ( )1
0 0
2
21 2 0 1 2 1 02 2
02 ln ln20
N Nb
b
Ey y P y y P PE
⎛ ⎞⎛ ⎞ >+ +⎜ ⎟⎜ ⎟ ⎜ ⎟<⎝ ⎠ ⎝ ⎠
s
s
⇒
( )1
0 0
1
2
1 22 2ln
b
N PPE
y y>
+<
s
s
⇒ 2
1
2 1y y γ>
+<
s
s
con ( )0 0
12 2ln
b
N PPE
γ =
Cálculo del umbral o frontera entre 3 2;s s
( ) ( ) ( ) ( )3
0 0
2
21 2 1 1 2 1 02 2
02 ln ln20
N Nb
b
Ey y P y y P PE
⎛ ⎞⎛ ⎞ >−+ +⎜ ⎟⎜ ⎟ ⎜ ⎟<⎝ ⎠ ⎝ ⎠
s
s
⇒
( )3
0 1
0
2
1 22 2ln
b
N PPE
y y>
− +<
s
s
⇒2
3
2 1y y γ>
− −<
s
s
Cálculo del umbral o frontera entre 3 4;s s
( ) ( ) ( ) ( )3
0 0
4
21 2 1 1 2 1 02 2
02 ln ln20
N Nb
b
Ey y P y y P PE
⎛ ⎞⎛ ⎞ >−+ +⎜ ⎟⎜ ⎟ ⎜ ⎟< −⎝ ⎠ ⎝ ⎠
s
s
⇒
( )3
0 1
0
4
1 22 2ln
b
N PPE
y y>
− + −<
s
s
⇒ 3
4
2 1y y γ>
+<
s
s
Cálculo del umbral o frontera entre 1 4;s s
( ) ( ) ( ) ( )1
0 0
4
21 2 0 1 2 1 02 2
02 ln ln20
N Nb
b
Ey y P y y P PE
⎛ ⎞⎛ ⎞ >+ +⎜ ⎟⎜ ⎟ ⎜ ⎟< −⎝ ⎠ ⎝ ⎠
s
s
⇒
( )1
0 0
1
4
1 22 2ln
b
N PPE
y y>
+ + −<
s
s
⇒ 1
4
2 1y y γ>
− −<
s
s
Obsérvese que si 0 1 0P P γ= ⇒ =

COM II Tema 2 (M. Cabrera)
16/09/2009
25
1s
2s
3s
4s
1y
2y
γ
γ−γ−
1s
2s
3s
4s
1y
2y
γ
γ−γ−
Figura 10 Zonas de decisión MAP para el el caso de señales biortogonales del apartado 2.2.6 Se ha supuesto 0 1P P> y por tanto 0γ > . En la Figura 10 se observan las zonas de decisión MAP obtenidas para el ejemplo de señales biortogonales definido en la Tabla 6 y con la base ortonormal hallada en el apartado 2.2.6
2.4 BER para PM y canal AWGN Como cálculo previo a la BER (Bit Error Rate), en la mayoría de las situaciones se obtendrá la probabilidad de error en el símbolo. Se define la BER como el porcentaje de bits detectados erróneamente en el receptor. Se define la probabilidad de error de símbolo eP como el porcentaje de símbolos detectados erróneamente en el receptor Ambas se hallan relacionadas y se consideran el parámetro de calidad para medir el comportamiento del sistema de comunicaciones digitales. Sea la probabilidad de error de símbolo:
( )Pr ( )L
eP error f d= ∫ yy y y
En el desarrollo que sigue se demuestran dos propiedades:
I) El criterio MAP coincide con el criterio de mínimizar la probabilidad de error. II) La probabilidad de error se puede calcular como el promedio estadístico de las
probabilidades de error condicionadas a cada uno de los símbolos: Considerando:
1 2
1
...LM
i j
ML
mm
Z Z ZZ Z
Z=
= ⊕ ⊕= ∅
=
∩
∪
Demostración de I):

COM II Tema 2 (M. Cabrera)
16/09/2009
26
( )
( )
( )
( )
( )
1
1
1 1
1
Pr ( )
Pr ( )
1 Pr ( )
( ) Pr ( )
1 Pr ( )
L
m
m
m m
m
e
M
m Z
M
mm Z
M M
mm mZ Z
M
mm Z
P error f d
error f d
f d
f d f d
f d
=
=
= =
=
= =
=
− =
− =
−
∫
∑ ∫
∑ ∫
∑ ∑∫ ∫
∑ ∫
y
y
y
y y
y
y y y
y y y
s y y y
y y s y y y
s y y y
De la expresión anterior se deduce que para minimizar la probabilidad de error, en cada zona de decisión
mZ la probabilidad Pr( )ms y debe ser máxima (Criterio MAP). Demostración de II): A partir de la última expresión de la probabilidad de error:
( )
( ) ( )
( ) ( )
( ) ( )
1
1
1
1
1 Pr ( )
1 Pr
1 Pr 1
Pr
m
m
Lm
Lm
M
e mm Z
M
m mm Z
M
m mm Z
M
m mm Z
P f d
f d
f d
f d
=
=
= −
= −
= − =
− =
⎛ ⎞⎜ ⎟− − =⎜ ⎟⎝ ⎠
∑ ∫
∑ ∫
∑ ∫
∑ ∫
y
y
y
y
s y y y
y s s y
s y s y
s y s y
La expresión anterior directamente se interpreta como:
1Pr( / ) Pr( )
M
e m mm
P e=
= ∑ s s (2.44)
A partir de (2.44) se estima la BER. Evidentemente en los casos binarios no se hará distinción entre ambas probabilidades: 2 eM BER P= ⇒ = (2.45) La utilización de umbrales óptimos MAP minimiza la BER. Esta afirmación se demuestra en las siguientes secciones para una dimensión y para el caso general.
2.4.1 Demostración de que mediante el criterio MAP se minimiza la Probabilidad de error para PAM (L=1).
La demostración para el caso general es la propiedad I. En este apartado se particulariza para el caso de dimensión L=1.

COM II Tema 2 (M. Cabrera)
16/09/2009
27
Sea una modulación MPAM. Se debe disponer de 1M − umbrales de decisión ; 1.. 1m m Mγ = −
para dividir el espacio de señal recibida unidimensional 1y en M zonas de decisión ; 1..m m M=Z : La regla de decisión puede formularse como:
1 1 1
1 1
1 1
ˆˆ ; 2 1
ˆm m m
M M
yy m My
γγ γγ
−
−
< ⇒ =< < ⇒ = ≤ ≤ −< ⇒ =
s ss s
s s
Si añadimos los siguientes umbrales totalmente relevantes;
0 ; Mγ γ= −∞ = +∞ la probabilidad de error puede expresarse como:
( ) ( )
( ) ( )
( ) ( ) ( )( )( ) ( )
( ) ( ) ( ) ( )( )
11
1
1 1
1
1
1
1 11
1
1 1 1 1
1
1 1 1 12
1 1
1 1 1 1 1 12
Pr Pr
Pr
Pr
Pr
Pr Pr
m
m
M
m
m
M
e m mm
y
M
m y m y mm
m y M
M
m y m m y mm
P e
f y dy
f y dy f y dy
f y dy
f y dy f y dy
γ
γ
γ
γ
γ
γ
−
−
−
−
=
+∞
− +∞
−∞=
−∞
+∞
− − −∞=
= =
+
+ +
=
+
∑
∫
∑ ∫ ∫
∫
∑ ∫ ∫
s s
s s
s s s
s s
s s s s
(2.46)
Para hallar el mínimo de Pe en (2.46) respecto a cada uno de los umbrales: 1 1 1,.., ,...,m Mγ γ γ− − , se deriva e iguala a cero:
( ) ( ) ( ) ( )1 11 1 1 1
1
Pr / Pr / 0em y m m m y m m
m
P f fγ γγ − − − −
−
∂= − + =
∂s s s s (2.47)
El resultado obtenido para las zonas de decisión es equivalente a maximizar la función MAP de (2.37). Falta realizar esta demostración para casos de dimensión L>1.
2.4.2 Cálculo de la BER para PAM. Caso binario: 2PAM En 2PAM se tienen dos símbolos:
Bajo la hipótesis 2m bE= = −s s ( )01 21 1 2 2: , Ndy Nα β= + −
Bajo la hipótesis 1m bE= = +s s ( )01 11 1 2 2: , Ndy Nα β= + +
Y al aplicar el criterio MAP se ha obtenido en 2.3.3 el umbral de decisión óptimo γ :

COM II Tema 2 (M. Cabrera)
16/09/2009
28
( ) ( )1
0 0 0 0
1 1
2
1 24ln ln
b
N P N PP d PE
y γ>
= =<
s
s
Además:
( ) ( )( )( ) ( )( )
( ) ( )
1 1
2 21 1
2 2
/ 22 2
/
1 1 2 2
1 1 1 0 1 2
1 1 1 1 0 1 2 1
/ 2 / 21 1 1 11 1 0 12 22 2
1 11 1 02 22 2
BER Pr( ) Pr( / ) Pr( ) Pr( / )Pr( / ) Pr( / )
/ /
exp exp
exp expd
d
e
y y
y d y d
P e eP y P y
P f y dy P f y dy
P dy P dy
P dy Pγ
σ
γ
γ
γ
γ
πσ πσσ σγ
λ λπ π
γ γ
−
+
+∞
−∞
+∞− +
−∞
−∞
= = + =< + > =
+ =
− + − =
− + −
∫ ∫
∫ ∫
∫
s s s ss s
s s
( ) ( )2 1
/ 2 / 21 0
d d
dy
PQ P Qσ
γ γσ σ
+∞
− + +
=
+
∫
1yd/2-d/2
( )1 1 1/yf y s( )
1 1 2/yf y s γ
1yd/2-d/2
( )1 1 1/yf y s( )
1 1 2/yf y s γ
Obsérvese que con símbolos equiprobables se obtiene:
( ) ( ) ( )2
0 02 20 BER 2 bEd dN NQ Q Qσγ = ⇒ = = =
El apéndice al final de este tema contiene la definición de la función Q(x), área de la Gaussiana Para comprobar que el umbral óptimo minimiza la BER en un caso particular, a continuación se evalúa la expresión anterior suponiendo dos opciones distintas para el umbral óptimo: Ejemplo: Suponemos: 1
1 0 1 22 210; ; 0; 0.2 0d dopt optP Pσ γ γ γ γ= = = = = = ≠ =
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )
61 2
4 9 40.4 0.61 1 12 12 2 2
BER 5 8.10
BER 4 6 8.10 10 4.10 BER
d
d d
Q Q
Q Q Q Qσ
σ σ
γ
γ γ
−
− − −
= = =
= + = + = + ≅ Caso general: Cálculo de la BER para MPAM En MPAM se tienen M símbolos. Se considerará la situación de símbolos equiprobables:
Bajo la hipótesis 2(2 1) dm ma m M= = − −s ( )0
1 1 1 2: , Nm m my Nα β α= +
( ) 1Pr m M=s

COM II Tema 2 (M. Cabrera)
16/09/2009
29
Y al aplicar el criterio MAP se han de obtener los umbrales de decisión óptimos ; 1.. 1m m Mγ = − :
( )2ˆ max , m
MAP m
Em m= −ss y s
El umbral mγ constituye la frontera entre las regiones de decisión correspondientes a ms y a 1m+s
1
2 21 11 1 1 12 2
m
m
m m m my yα α α α+
+ +
>− −
<
s
s
( ) ( )1
2 211 1 12
m
m
m m m my α α α α+
+ +
>− + −
<
s
s
( )1
11 1 12 2 2
m
m
d dm m m m my α α γ α α
+
+ +
>+ + = = − = +
<
s
s
Cálculo de la Probabilidad de error : 1
1 1Pr( ) Pr( / ) Pr( / )
M M
e m m mMm m
P e e= =
= =∑ ∑s s s
Para los dos símbolos extremos coincide la probabilidad de error debido a las simetrías de las funciones de densidad de probabilidad gaussianas:
( )( )( ) ( ) ( )
1 2 21
21
2
2
1 11 1 1 122
2 21 1 1 11 12 2 22 2
Pr( / ) Pr( / ) ( / ) exp
exp exp
dMM
M
d
d
yM y M
d
e e f y s dy dy
dy dy Q
αγα
πσ σ
σπ πλ λ
− −−
−∞ −∞
− +∞
−∞ +
= = = − =
− = − =
∫ ∫
∫ ∫
s s
Símbolos centrales, m=2..M-1:
( )( ) ( )( ) ( )
1
1 1
2 2 21 1
2 2
2
1 1 1 1
1 1 1 11 12 2 22 2
Pr( / ) ( / ) ( / )
exp exp 2
m
m
dm
m m
dm
m y m y m
y y d
e f y s dy f y s dy
dy dy Q
γ
γ
αα α
σπσ πσσ σα
− +∞
−∞
− +∞− −
−∞ +
= + =
− + − =
∫ ∫
∫ ∫
s
Por tanto, la probabilidad de error de símbolo total resulta:
( ) ( ) ( )( ) ( )1 2 22 2 2 2( 2)2d d d dM
e M MP Q M Q Q Qσ σ σ σ−= + − + = .
A partir de la expresión anterior y considerando: 02
2Nσ = y
2 2112
sE Mb b bE d−= =
Se obtiene: ( )2 0
62 21
bEbMe M NM
P Q−−
=
Con el objeto de obtener la BER en función del cociente
0
bEN , se considerará:
• Codificación binaria de tipo Gray, de forma que dos símbolos colindantes solo se diferencian en uno de los b bits.

COM II Tema 2 (M. Cabrera)
16/09/2009
30
• Cociente 0
bEN >>1, de modo que cuando se produce un error, se asumirá que solo se produce entre
dos símbolos colindantes y por lo tanto un símbolo erróneo equivale a un bit erróneo y b-1 bits correctos. Por tanto, la BER resulta b veces menor que la eP .
Se aproxima: ( )2 0
62 21
BER e bP EbMb b bM NM
P Q−−
= ≅ =
2.4.3 Cálculo de la BER para PPM En 2PPM se tienen dos símbolos:
Bajo la hipótesis 21 0
d⎛ ⎞= ⎜ ⎟⎜ ⎟
⎝ ⎠s
( )2
1 22 21 1 2
2
0: , ,
0 0
d d
N No
β σσ
β σ
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞= + = + = ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠
y s n s I
Bajo la hipótesis 22
0d
⎛ ⎞= ⎜ ⎟
⎝ ⎠s
( )2
1 22 2 2
22 2
0 0 0: , ,d dN N
oβ σ
σβ σ
⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞= + = + = ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎝ ⎠
y s n s I
Considerando símbolos equiprobables la búsqueda del umbral óptimo se puede obtener a partir de una métrica relativamente sencilla, ya que son símbolos de igual energía:
( ) ( )ˆ max , maxMAP m m
Tm m m= =s ss y s y s
Por tanto: 1 2
2 1
1 2 2 12 2d dy y y y
> >⇒
< <
s s
s s
1s
2s
1y
2y 1s
2s
1y
2y
El cálculo de la probabilidad de error a partir de la figura conlleva la resolución de una integral doble en la que las dos variables no se pueden operar de forma independiente. Ello es debido a que las fronteras de decisión no son paralelas y/o perpendiculares a los ejes. Por ejemplo:
1
1 1 2 1Pr( / ) ( / )y
e f s dy dy+∞ +∞
−∞
= ∫ ∫ ys y
Para evitar este problema, se realiza a continuación una rotación de ejes, mediante un giro de 45ºθ = .

COM II Tema 2 (M. Cabrera)
16/09/2009
31
La matriz de rotación es de la forma: ( ) 12
cos( ) sin( ) 1 1sin( ) cos( ) 1 1
Mθ θ
θθ θ
+ + + +⎛ ⎞ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟− + − +⎝ ⎠ ⎝ ⎠
Obsérvese en la figura el giro que se debe hacer:
1s
2s
1y
2y
1 'y
2 'y45ºθ =
1s
2s
1y
2y
1 'y
2 'y45ºθ =
Implícitamente se ha realizado un cambio de base, pasando de la base ortonormal { }1 2( ), ( )t tϕ ϕ a una
nueva base { }1 2( ), ( )t tψ ψ que también resulta ortonormal. La nueva base ortonormal generadora corresponde a un giro de 45ª de la base original:
1 1 2
2 1 2
( ) cos ( ) sin ( )( ) sin ( ) cos ( )t t tt t t
ψ θϕ θϕψ θϕ θϕ
= += − +
( )
( )
1 1 1 112
2 2 2 2
1 1 11
2 2 2
( ) ( ) ( ) ( )cos( ) sin( ) 1 1( ) ( ) ( ) ( )sin( ) cos( ) 1 1
( ) ( ) ( )cos( ) sin( )( ) ( ) (sin( ) cos( )
t t t tM
t t t t
t t tM
t t t
ψ ϕ ϕ ϕθ θθ
ψ ϕ ϕ ϕθ θ
ϕ ψ ψθ θθ
ϕ ψ ψθ θ−
+ + + +⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞= = =⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟− + − +⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
+ −⎛ ⎞ ⎛ ⎞ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟ ⎜ ⎟+ +⎝ ⎠⎝ ⎠ ⎝ ⎠
112
2
( )1 1) ( )1 1
tt
ψψ
+ −⎛ ⎞ ⎛ ⎞⎛ ⎞=⎜ ⎟ ⎜ ⎟⎜ ⎟+ +⎝ ⎠⎝ ⎠ ⎝ ⎠
Los vectores de señal cambian las coordenadas respecto al nuevo sistema de referencia (Las coordenadas respecto al nuevo sistema se distinguirán con el supra índice ‘):
( )
( )
2211 1 2
2
212 2 2
22
1 1'
1 1 0
01 1'
1 1
d d
d
d
d d
M
M
θ
θ
⎛ ⎞ ++ + ⎛ ⎞⎛ ⎞= = =⎜ ⎟ ⎜ ⎟⎜ ⎟⎜ ⎟ −− +⎝ ⎠ ⎝ ⎠⎝ ⎠
⎛ ⎞ ++ + ⎛ ⎞⎛ ⎞= = =⎜ ⎟ ⎜ ⎟⎜ ⎟ +− +⎝ ⎠ ⎝ ⎠⎝ ⎠
s s
s s
La distribución de las nuevas coordenadas de ruido es de nuevo una f.d.p. gaussiana bidimensional, con vector de medias nulo y matiz de covarianzas diagonal, tal como se demuestra a continuación:
( )0
0
1 1 1 21 12 2
2 2 1 2
1
2
21 2
1 2 22 2
' 1 1' 1 1
' 0' 0
0' 0' '
' 0 0
N
N
E
E
β β β ββ β β β
ββ
β σβ β
β σ
+⎛ + + ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞= =⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ −− +⎝ ⎠⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠
⎡ ⎤⎛ ⎞ ⎛ ⎞=⎢ ⎥⎜ ⎟ ⎜ ⎟
⎝ ⎠⎝ ⎠⎣ ⎦⎛ ⎞⎡ ⎤ ⎛ ⎞⎛ ⎞
= = ⎜ ⎟⎜ ⎟⎢ ⎥⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠⎣ ⎦ ⎝ ⎠

COM II Tema 2 (M. Cabrera)
16/09/2009
32
Por tanto:
( ) ( ) 02 2 21 2 2' : 0, ; ' : 0, ; NN Nβ σ β σ σ =
La representación de señal respecto a las nuevas coordenadas queda reflejada en la siguiente figura:
La BER se puede calcular de este modo como una integral simple, únicamente a partir de la variable 2 'y . La expresión resultante es:
( ) ( )
( ) ( ) ( )
2 1
2 1 2
2
0 0
2 1
' 1 2 1 ' 2 1 ' 1 1 2 10 0
' 2 1 2 ' 1 1 1 ' 2 1 20 0
2 2
Pr / ' Pr / '
( ' ') ' ' ( ' ') ( ' ') ' '
( ' ') '. ( ' ') ' ( ' ') '
b
b
y y
y y y
Ed dN N
P e e
f dy dy f y f y dy dy
f y dy f y dy f y dy
Q Q Qσ
+∞ +∞ +∞ +∞
−∞ −∞
+∞ +∞ +∞
−∞
= = =
= =
= =
= =
∫ ∫ ∫ ∫
∫ ∫ ∫
y
s s
y s s s
s s s
Este resultado también se puede obtener del siguiente modo:
( ) ( ) ( )( )( )
( ) ( ) ( )
21
21
2 2
2
0 0
2 1 1 2
'1 1' 1 1 122
2 2
Pr / ' Pr / ' Pr '
( ') ' exp 'd d
b
db
Ed dN N
P e e
f d d
Q Q Q
ββ πσ σ
σ
β
β β β+∞ +∞
= = = > =
= − =
= =
∫ ∫
s s
2.4.4 Señales Biortogonales. Para el cálculo de la BER con señales biortogonales se retomará el ejemplo del apartado 2.2.5: Vectores del espacio de señal. Con distancia mínima d; 21
22s bE E d= =
1s
2s
1 'y
2 'y
d

COM II Tema 2 (M. Cabrera)
16/09/2009
33
21 3
2
22 4
2
db
db
db
db
E
E
E
E
⎛ ⎞⎛ ⎞⎜ ⎟= − =⎜ ⎟ ⎜ ⎟− −⎝ ⎠ ⎝ ⎠⎛ ⎞⎛ ⎞⎜ ⎟= − = =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
s s
s s
Asumiendo equiprobabilidad entre símbolos es fácil de comprobar que las cuatro regiones de decisión se corresponden con los cuatro cuadrantes.
Se desarrolla a continuación, el cálculo de la probabilidad de error. Por simetría las 4 probabilidades de error condicionadas coinciden, con lo que (2.44) se traduce en:
1 2 3 4Pr( / ) Pr( / ) Pr( / ) Pr( / )eP e e e e= = = =s s s s Un modo de calcular esta probabilidad es:
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
( ) ( )
4 1 2 3
1 2 1 2
2 21 22 2
2 2
4 4 4
0
4 2 1 4 2 10 0
0
1 4 1 2 4 2 1 4 1 2 4 20 0
1 1 1 112 22 2
0
Pr( / ) 1
exp expd d
Z Z Z Z
y y y y
y y
e f d f d
f dy dy f dy dy
f y dy f y dy f y dy f y dy
dy dyπσ πσσ σ
∪ ∪
+∞ +∞ +∞
−∞ −∞
+∞ +∞ +∞
−∞ −∞
+∞ +∞+ +
−∞
= − =
+ =
+ =
⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
∫ ∫
∫ ∫ ∫ ∫
∫ ∫ ∫ ∫
∫ ∫
y y
y y
s y s y y s y
y s y s
s s s s
( ) ( )
( ) ( ) ( )( ) ( ) ( )
2 21 22 2
2 2
2
01 1 1 1
1 22 22 20
22 2 2 2 2
exp exp
1 2
d dy y
d d d d d
dy dy
Q Q Q Q Q
πσ πσσ σ
σ σ σ σ σ
+∞+ +
−∞
+
⎛ ⎞ ⎛ ⎞− − =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
+ − = −
∫ ∫
Otra posibilidad de cálculo es (sin detallar las integrales implícitas):
1s
2s
1y
2y
4s
3s
1Z
2Z3Z
4Z

COM II Tema 2 (M. Cabrera)
16/09/2009
34
( ) ( ) ( ) ( )( ) ( ) ( )( )( ) ( )
4 1 2 3 4
1 2 4 1 2 4 1 2 4
1 4 2 4 1 4 2 4 1 4 2 4
2 2 2 2 2 2
22 2
Pr( ) Pr( / )
Pr( 0, 0 ) Pr( 0, 0 ) Pr( 0, 0 )
Pr( 0 ).Pr( 0 ) Pr( 0 ).Pr( 0 ) Pr( 0 ) Pr( 0 )
1 1
2
d d d d d d
d d
e Z Z Z
y y y y y y
y y y y y y
Q Q Q Q Q Q
Q Qσ σ σ σ σ σ
σ σ
= ∈ ∪ ∪ =
> > + < > + > < =
> > + < > + > < =
+ − + − =
−
s y s
s s s
s s s s s s
Otra posibilidad de cálculo es:
( )( ) ( )( )( )( ) ( )( )
1 2 1 2
2 2 2 2
2 21 22 2
2 2
2 21 22 2
2
4 1 2 1 22 2 2 2
1 1 2 2 1 1 2 2
1 1 1 11 22 22 2
1 1 1 11 22 22 2
Pr( / ) Pr( ) Pr( ) Pr( ) Pr( )
( ) ( ) ( ) ( )
exp exp
exp exp
d d d d
d d
d
d d d de
f d f d f d f d
d d
d d
β β β β
β β
πσ πσσ σ
β β
πσ πσσ σ
β β β β
β β β β β β β β
β β
β β
+∞ +∞ +∞ +∞
+∞ +∞
+∞
= > + > − > > =
+ − =
− + −
− − −
∫ ∫ ∫ ∫
∫ ∫
∫
s
( ) ( )2
22 22
d
d dQ Qσ σ
+∞
=
−
∫
Suponiendo 0
bEN >>1
( ) ( )02 2 bEdb NP Q Qσ≅ =
2.4.5 Señales QAM Cuadradas. Como ejemplo de este tipo de constelaciones, se tiene 16QAM, 64QAM, 256QAM. Los símbolos se distribuyen en forma de cuadrado. En cada lado se tienen M símbolos y en el interior del cuadrado hay ( ) ( )2 2M M− − símbolos interiores. Tanto para la primera coordenada como para la segunda, los posibles valores de la constelación son:
( 1)3
1 2 2 2
( 1)32 2 2 2
, ,..., ;
, ,...,
M dd dm
M dd dm
α
α
−
−
= ± ± ±
= ± ± ±
Por lo que la energía media de símbolo es: 2 2 21
1 2 6M
s b m mE bE E E dα α −⎡ ⎤ ⎡ ⎤= = + =⎣ ⎦ ⎣ ⎦
En el cálculo de la probabilidad de error se tienen tres tipos de símbolos:
• Para los cuatro símbolos de los vértices la probabilidad de error condicionada es aproximadamente: ( )22 dQ σ
• Para los ( ) ( )2 2M M− − símbolos interiores la probabilidad de error condicionada es
aproximadamente: ( )24 dQ σ
• Para los ( )4 2M − símbolos laterales la probabilidad de error condicionada es aproximadamente:
( )23 dQ σ

COM II Tema 2 (M. Cabrera)
16/09/2009
35
Promediando las probabilidades de error condicionadas para el caso de símbolos equiprobables se tiene: ( ) ( ) ( ) ( ) ( )( ) ( ) ( )4 121
2 2 24.2 4 2 .3 2 4 2M
d d dM Me
dP Q M Q M Q Qσ σ σ σ−
= + − + − = Por lo que la BER queda como:
( ) ( )4 1
0
31
M bb Mb
EbP M NQ−= −

COM II Tema 2 (M. Cabrera)
16/09/2009
36
2.5 Cotas para la BER En este apartado se desarrolla una cota superior para la probabilidad de error. Se aplicará cuando ésta no se puede integrar de forma exacta sin recurrir a integrales de gran complejidad. Sea un espacio de señal, en el que los M símbolos son equiprobables:
( )1
1Pr
M
e mMm
P e=
= ∑ s (2.48)
La probabilidad condicionada al símbolo ms , se halla acotada superiormente:
( ) ( ) ( )21, 1,
Pr Pr miM M
dm i m
i i m i i me Q σ
= ≠ = ≠
= ≤∑ ∑s s s (2.49)
donde mid es la distancia entre símbolos:
22
mi m id = −s s (2.50) La ecuación (2.49), de nuevo se vuelve a acotar, utilizando la mínima distancia
{ }1min ,..,m MIN m mMd d d− = de todas las referenciadas en (2.49):
( ) ( ) ( )2 21,
Pr ( 1)mi m MINM
d dm
i i m
e Q M Qσ σ−
= ≠
≤ ≤ −∑s
Y sustituyendo en (2.48):
( ) ( )( 1)2 2
1( 1)m MIN MIN
Md dM
e Mm
P Q M Qσ σ−−
=
≤ ≤ −∑ (2.51)
Donde de nuevo { }1min ,..,MIN MIN M MINd d d− −= y es el parámetro que a lo largo de este tema se denomina d.
( )2( 1) deP M Q σ≤ − (2.52)
Nota: En función de la constelación, esta cota puede ser inferior. Por ejemplo para PSK, dado que cada símbolo tiene solo “2 símbolos vecinos a la mínima distancia, se suele sustituir el M-1 por 2. Para QAM cuadrado, dado que el máximo número de vecinos que presenta cada símbolo es 4, se suele sustituir el M-1 por 4.

COM II Tema 2 (M. Cabrera)
16/09/2009
37
2.5.1 Ejemplo: Señales M-Ortogonales Sea un alfabeto de M señales ortogonales de la forma: Es decir:
( ), ( ) 0; m ns t s t m n= ≠
En esta situación las funciones de la base coinciden con las señales del alfabeto, salvo normalización:
( ); ( ) m
m
s tm E
L M tϕ= =
Los vectores resultantes son:
{ } 12
0 0: :
; 1.. ;Pr: :0 0
dm m Mb
m MbE
⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟= = = =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
s s
La energía media de bit es:
2
2d
b bE = Al aplicar el criterio MAP a esta constelación de símbolos equiprobables y de igual energía, se obtiene según (2.43):
( ) ( ) ( )2ˆ max , max max
m m m
dm MAP m m my y− = = =s s ss y s
Es decir, según el criterio MAP, la decisión del símbolo viene dada por la coordenada máxima del vector recibido. El cálculo exacto de la probabilidad de error se obtiene como:
{ } { }
( )
( ) ( )( )2 2
2 21 12 2 2 2
1 2
1 2
0 111 1
2 20
1 Pr 1 Pr , ,...,
1 ... ...
1 1
m m m
d dy ym m
m m
e m m m m M m
y y y
m M m
MMy ym m
P Z y y y y y y
f dy dy dy dy
e Q dy e Q dyσ σσ σπσ πσ
⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
+∞
−∞ −∞ −∞ −∞
+∞ −−− −−
−∞
= − ∈ = − < < <
= − =
− − −
∫ ∫ ∫ ∫
∫ ∫
y s
y s
La expresión anterior, numéricamente es una integral tabulada, sin embargo, en muchas ocasiones se suele calcular directamente la cota superior de esta probabilidad por ser bastante ajustada a la probabilidad exacta dada. La probabilidad de error se halla acotada según (2.51) por:
( ) ( ) ( )02 2( 1) ( 1) ( 1)MIN bd Ede NP M Q M Q M Q bσ σ≤ − = − = −

COM II Tema 2 (M. Cabrera)
16/09/2009
38
2.6 Comparación de Modulaciones PM En este apartado se compara la BER de las diferentes modulaciones estudiadas respecto a la
0
bEN en dB.
En este apartado, se considera equiprobabilidad de símbolos y umbrales óptimos MAP en todas las situaciones.
2.6.1 Señales PAM
Aplicando ( )2 0
62 21
BER e bP EbMb b bM NM
P Q−−
= ≅ = se obtienen los resultados de la Figura 11
-2 0 2 4 6 8 10 12 14 16 1810-20
10-15
10-10
10-5
Eb/No (dB)
BE
R
PAM 2(*) 4 8 16
Figura 11 BER en función de la Eb/No para MPAM, M=2(*), 4, 8, 16
Se observa que para valores constantes de
0
bEN y de velocidad de bit (rb), con el aumento del número de
niveles:
• Aumenta la BER (Inconveniente) • Disminuye el ancho de banda de transmisión que en general es proporcional a la velocidad de
símbolo (Ventaja).
brT bB r =

COM II Tema 2 (M. Cabrera)
16/09/2009
39
2.6.2 Comparación 2PPM-2PAM
Para 2PAM: ( )0BER 2 bE
NQ=
Para 2PPM: ( )0BER bE
NQ=
-2 0 2 4 6 8 10 12 14 16 18
10-15
10-10
10-5
Eb/No (dB)
BE
R
2PAM(*) 2PPM(-)
Figura 12 BER en función de la Eb/No 2PAM-PPM
COM II Tema 2 (M. Cabrera)
16/09/2009
40
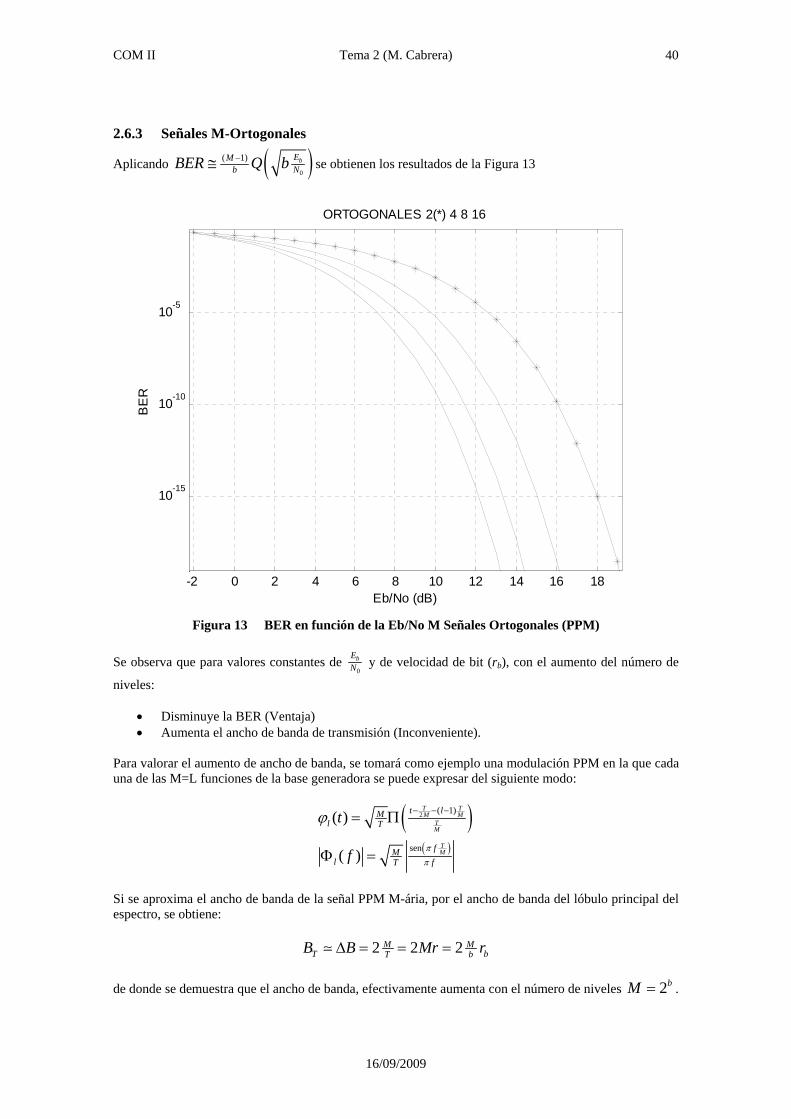
2.6.3 Señales M-Ortogonales
Aplicando ( )0
( 1) bEMb NBER Q b−≅ se obtienen los resultados de la Figura 13
-2 0 2 4 6 8 10 12 14 16 18
10-15
10-10
10-5
Eb/No (dB)
BE
R
ORTOGONALES 2(*) 4 8 16
Figura 13 BER en función de la Eb/No M Señales Ortogonales (PPM)
Se observa que para valores constantes de
0
bEN y de velocidad de bit (rb), con el aumento del número de
niveles:
• Disminuye la BER (Ventaja) • Aumenta el ancho de banda de transmisión (Inconveniente).
Para valorar el aumento de ancho de banda, se tomará como ejemplo una modulación PPM en la que cada una de las M=L funciones de la base generadora se puede expresar del siguiente modo:
( )( )
2 ( 1)
sen
( )
( )
T TM M
TM
TM
t lMl T
fMl T f
t
f ππ
ϕ − − −= Π
Φ =
Si se aproxima el ancho de banda de la señal PPM M-ária, por el ancho de banda del lóbulo principal del espectro, se obtiene:
2 2 2M MT bT bB B Mr rΔ = = =
de donde se demuestra que el ancho de banda, efectivamente aumenta con el número de niveles 2bM = .

COM II Tema 2 (M. Cabrera)
16/09/2009
41
2.7 Apéndice: Área de la Gaussiana. Sea 0 x≤ < +∞ Se define:
2
212
( )x
Q x e dλ
πλ
+∞−= ∫ (2.53)
Observe que: 1
2(0)Q =
A partir de (2.53) es fácilmente comprobable que:
• 2
212
1 ( )x
e d Q xλ
πλ
+∞−
−
= −∫
• 2
212
( )x
e d Q xλ
πλ
−−
−∞
=∫
• 2
212
1 ( )x
e d Q xλ
πλ−
−∞
= −∫
Relaciones con las funciones erf y erfc. Sea 0 x≤ < +∞ Se define la función de error:
22
0
erf ( )x
x e dλπ
λ−= ∫ (2.54)
y la función de error complementario:
22erfc( ) 1 erf ( )
x
x e d xλπ
λ+∞
−= = −∫ (2.55)
Mediante adecuados cambios de variable se puede comprobar que:
( )
1 12 2
erfc( ) 2Q 2
Q( ) erfc( )
x x
x x
=
= (2.56)

COM II Tema 2 (M. Cabrera)
16/09/2009
42
La siguiente figura muestra los valores de Q(x) para 0 5x≤ ≤ +
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 510-7
10-6
10-5
10-4
10-3
10-2
10-1
100Q
(x)
x
En la siguiente expresión se muestra una cota inferior (facilitada por el profesor Josep Sala) y una cota superior de la función Q(x). Ambas expresiones son válidas para aproximar la función Q(x) para valores de x > 0.5 según puede apreciarse en la figura adjunta.
( )2 22
1 1 1 1 11 exp exp2 22 2
x Q x xxx xπ π
⎛ ⎞ ⎛ ⎞ ⎛ ⎞− − ≤ ≤ −⎜ ⎟ ⎜ ⎟ ⎜ ⎟⋅ ⋅⎝ ⎠ ⎝ ⎠ ⎝ ⎠

COM II Tema 2 (M. Cabrera)
16/09/2009
43

COM II Tema 2 (M. Cabrera)
16/09/2009
44
2.8 Ejercicios Propuestos
2.8.1 Ejercicio 1: Ortogonalización GS En la figura se representan las señales correspondientes a un alfabeto de M=3
Se pide:
a) Calcule la distancia entre señales ( )2( ) ( )i jd s t s t= −∫ en función de los parámetros A,T.
b) Aplique Gramm-Schmidt para hallar una base generadora y ortonormal de dimensión L=2. Observe que puede simplificar cálculos si utiliza que 3 1 2( ) ( ) ( )s t s t s t= − −
c) Obtenga las coordenadas de las 3 señales sobre la base hallada y póngalas en función de la distancia d. Observe que puede simplificar cálculos si utiliza que 3 1 2( ) ( ) ( )s t s t s t= − −
d) Halla la energía media de símbolo sE en función de d. Suponiendo que los símbolos se transmiten con equiprobabilidad a través de un canal ideal de ruido aditivo y gaussiano 0
2( ) NwS f = , la f.d.p. del vector de detectado y condicionado por el símbolo
transmitido es ( ) ( )2 0
0
21 1
2( ) expm mNN
fπ
= − −y y s y s
e) Aplique el criterio MAP para hallar la frontera de decisión entre 2 símbolos cualesquiera y deduzca por simetría el resto de fronteras de decisión para delimitar las 3 regiones iZ . Dibuje las zonas sobre el espacio de señal recibida.
f) ¿Qué dificultar supondría el cálculo de la probabilidad de error exacta? g) Obtenga una cota superior para la probabilidad de error eP en función de sE
2.8.2 Ejercicio 2: MAP y Cálculo de Probabilidad de error. Se desea transmitir una secuencia de bits equiprobables y estadísticamente independientes entre sí transmitiendo una energía por bit bE y a una velocidad de r símbolos/seg constante.
En función de la demanda del usuario, se utilizará un tamaño de alfabeto variable 2bM = , para dar curso a una velocidad de bit br variable. La base generadora del espacio de señal, es de dimensión L b=
funciones { }1 2( ), ( ),.., ( )Lt t tϕ ϕ ϕ ortonormales, construyendo los símbolos según:
2
2
:
d
md
±⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟±⎝ ⎠
s
La señal se transmite por un canal ideal ( ) ( )ch t tδ= de ruido w(t) blanco gaussiano de media nula y
densidad espectral 02( ) N
wS f = , se proyecta en el espacio de señal y se detecta según un detector MAP. Se pide:
a) Calcular la energía media de bit bE , en función de la distancia mínima entre símbolos d .
b) Dibujar el receptor y el espacio de señal para 3L b= = .
2 A
A−
T
3T
1( )s t 2 A
A−
T
3T
2 ( )s t
23T
2 A
A−
T3 ( )s t
23T

COM II Tema 2 (M. Cabrera)
16/09/2009
45
c) Dar una expresión para las fronteras de decisión para el caso general de dimensión L . d) Calcular la probabilidad de error eP exacta en función del cociente
0
bEN para el caso general de
dimensión L . e) Dar una expresión aproximada para la BER suponiendo elevado el cociente
0
bEN para el caso
general de dimensión L .
Binomio de Newton: ( )0
NN N n n
n
Na b a b
N n−
=
⎛ ⎞+ = ⎜ ⎟−⎝ ⎠
∑ con ( )
!! !
n nr r n r
⎛ ⎞=⎜ ⎟ −⎝ ⎠
2.8.3 Ejercicio 3: Modulación ortogonal. Se desea transmitir una secuencia de bits equiprobables y estadísticamente independientes entre sí transmitiendo una energía por bit bE . Se dispone de un alfabeto de 4M = señales:
( ) ( )1 22( ) sen 2 ; 1, 2,3, 4Tm t
m T Ts t A t mπ − −= Π =
La señal se transmite por un canal ideal ( ) ( )ch t tδ= de ruido w(t) blanco gaussiano de media nula y
densidad espectral 02( ) N
wS f = , se proyecta en el espacio de señal y se detecta según un detector MAP. Se pide:
a) Calcule una base ortonormal de funciones generadoras del espacio de señal y dibújelas. b) Obtenga la distancia mínima entre símbolos d y la energía de bit bE en función de los
parámetros físicos de la modulación: , bA r .
c) Dar una cota superior para la probabilidad de error en función del cociente 0
bEN
2.9 Referencias Bibliográficas Carlson A. Bruce, “Communication Systems”, Mcgraw-Hill Proakis, Salehi, "Communication Systems Engineering", Prentice Hall.





























