Embed Size (px)
Citation preview
Telerobotics on the Telerobotics on the InternetInternet
James MellingtonJames Mellington
OverviewOverview
TeleroboticsTelerobotics
Project GoalsProject Goals
Basic System ComponentsBasic System Components
The Original SystemThe Original System
Extension of the SystemExtension of the System
User FeedbackUser Feedback
SummarySummary
TeleroboticsTelerobotics
What is a telerobot?What is a telerobot? A remotely controlled device, designed to A remotely controlled device, designed to
perform some type of positioning or perform some type of positioning or mechanical manipulation under the real time mechanical manipulation under the real time direction of a human operator.direction of a human operator.
What is the motivation behind the CSSE What is the motivation behind the CSSE telerobotics lab?telerobotics lab?
Project GoalsProject Goals
Two goals;Two goals; To create a system which provides the user To create a system which provides the user
with the necessary feedback to move the with the necessary feedback to move the robot to a precise location without running into robot to a precise location without running into objects or structures.objects or structures.
To make the system easily transportable to To make the system easily transportable to other telerobots.other telerobots.
Basic System ComponentsBasic System Components
Remote ManipulatorRemote Manipulator 4 axis robot4 axis robot
Interface for operator-machine interactionInterface for operator-machine interaction Operator to robotOperator to robot Robot to operatorRobot to operator
The Original SystemThe Original System
Operator ControlOperator Control Simulation of the teach pendantSimulation of the teach pendant
Robot FeedbackRobot Feedback VisualVisual
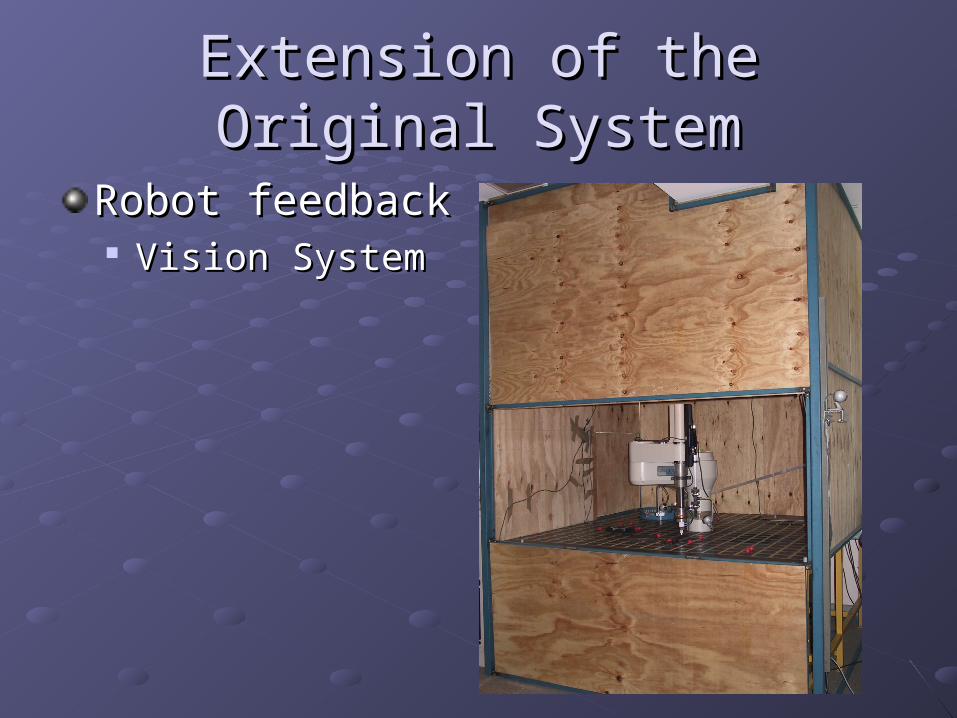
Extension of the Original Extension of the Original SystemSystem
Robot feedbackRobot feedback Vision SystemVision System
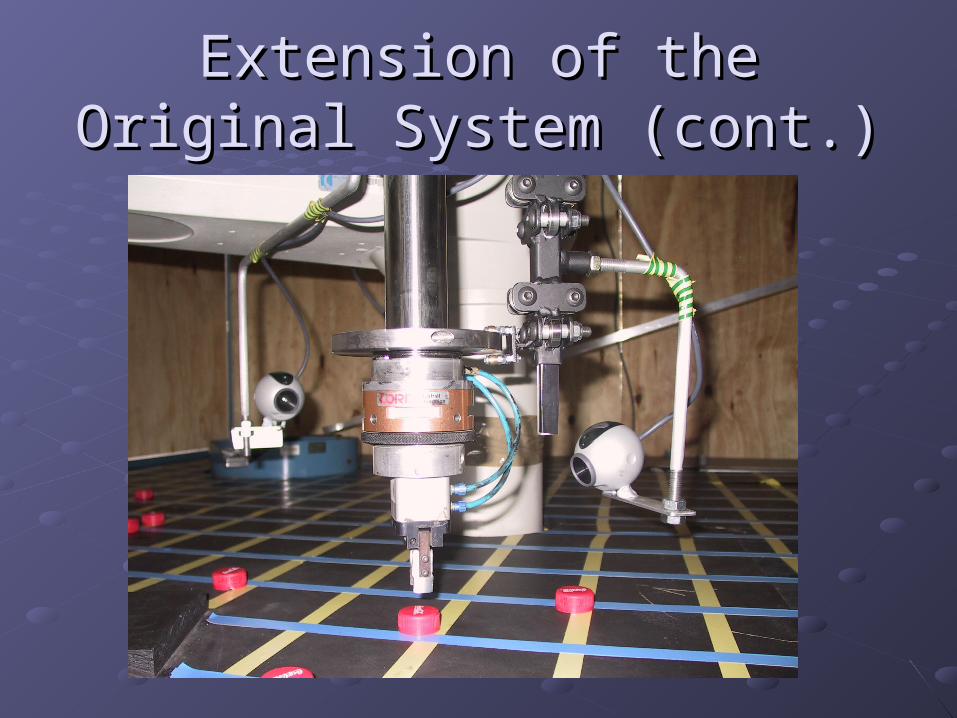
Extension of the Original Extension of the Original System (cont.)System (cont.)
Extension of the Original Extension of the Original System (cont.)System (cont.)
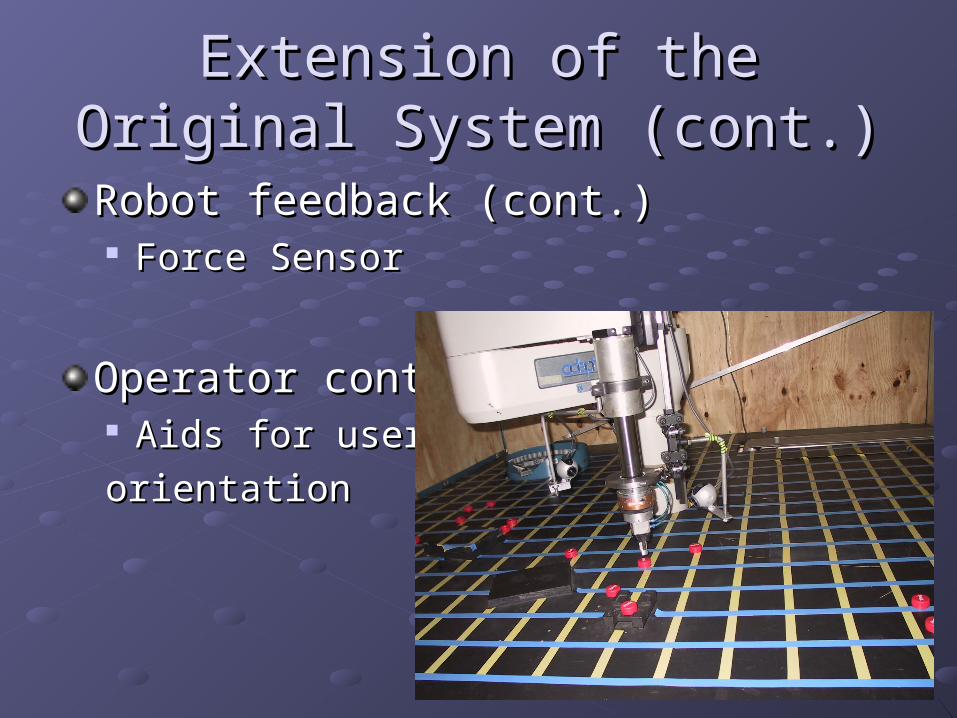
Robot feedback (cont.)Robot feedback (cont.) Force SensorForce Sensor
Operator controlOperator control Aids for user Aids for user
orientationorientation
User FeedbackUser Feedback
Several groups were tested.Several groups were tested. Second year studentsSecond year students Non robotic usersNon robotic users
SummarySummary
Achievements.Achievements.
What still needs to be done?What still needs to be done? Integrating the force sensor.Integrating the force sensor. Transporting this system on to the other Transporting this system on to the other
robots in the telerobotics lab.robots in the telerobotics lab.
Questions ?Questions ?