Embed Size (px)
Citation preview

Down
Journal ofDynamic Systems,
Measurement,and
ControlTechnical Briefs
,
i
wl
o
i
i
arn isingel,el
earh. A
tolastrol-
zedred
ltyona
on--;sive
the
al-gthetothe
wepa-p-iffi-In
andweon-
ing
dsoa
A Computational Issue and ModifiedFormulas for NonlinearDissipative Controllers
Shr-Shiung Hu*The 202nd Arsenal, C.L.C., P.O. Box 90582, Nankang,Taipei 115, Taiwane-mail: [email protected]
Pao-Hwa YangDepartment of Mechanical Engineering, Hsiuping Instituof Technology, Dah-Li City, Taichung County 412,Taiwane-mail: [email protected]
B. C. ChangDepartment of Mechanical Engineering and MechanicsDrexel University, Philadelphia, PA 19104e-mail: [email protected]
Ball, Helton, and Walker (BHW) derived the nonlinear dissipatcontroller formulas with the assumption implying that no stabmode uncontrollable from the exogenous input. The assumptiomore restrictive than that considered in DGKF. In this paper,address the numerical difficulty encountered by BHW’s controformulas when the assumption is not satisfied. Next, we propomodified nonlinear dissipative controller and successfully remthe numerical difficulty. We also show that the linear versionthe proposed controller formulas is identical to the DGKF H`controller. An example is given to demonstrate constructthe proposed controller and simulating the closed-loop puresponses.@DOI: 10.1115/1.1590686#
1 IntroductionIt is well known in the control community that the linearH`
control problem can be easily solved by the DGKF@1# state-spaceapproach. Recently, many investigators have successfully tacthe much more complicated nonlinearH` control problem by theconcept of energy dissipation. Van der Schaft@2# employed theenergy dissipation approach to solve the state feedback nonlH` control problem. His works on the output feedback case@3#
*Corresponding author.Contributed by the Dynamic Systems, Measurement, and Control Divis
of THE AMERICAN SOCIETY OF MECHANICAL ENGINEERS for publicationin the ASME JOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL.Manuscript received by the ASME Dynamic Systems and Control DivisiNovember 16, 2000; final revision, November 25, 2002. Associate Editor: S. N
Journal of Dynamic Systems, Measurement, and ControlCopyright © 2
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
te
velen ise
lerse aveof
nglse
kled
near
involved two Hamilton-Jacobi inequalities~HJI’s! and a couplingcondition. Isidori @4# proposed a construction of the nonlinedissipative controller with the assumption that the observer gaigiven. Although the observer gain can be obtained by solvthe H` control problem for the associated linearized modhow to find the optimal observer gain for the nonlinear modwas not mentioned. Ball, Helton, and Walker~BHW! @5# derivednecessary conditions for solution existence of the nonlinH` control problem based on the energy dissipation approacseparation principle and the solutions to the HJI’s are usedconstruct a nonlinear dissipative controller. In the BHW formu@5#, an assumption was made so that no stable mode is unconlable from the exogenous input for the corresponding linearimodel. The assumption is more restrictive than that considein DGKF.
When the assumption is not satisfied, a numerical difficuwill arise in the process of constructing the controller basedthe BHW formulas. As mentioned before, in order to obtainnonlinear dissipative controller one needs to solve the HamiltJacobi equations~HJE’s! or HJI’s. Up to date, there is no computational algorithm for the exact explicit solution of HJEhowever, an approximate solution can be obtained by succescomputational methods@2,6,7#. The solution is in the form ofpower series in which the first term can be constructed fromsolution of the algebraic Riccati equation~ARE! of the corre-sponding linearized model. We will explain how the numericdifficulty @8# arises in solving the BHW ARE’s or algebraic Riccati inequalities~ARI’s! and then propose a method of modifyinthe HJE’s and nonlinear dissipative controller formulas so thatnumerical difficulty can be eliminated. An example is givendemonstrate the numerical difficulty and the construction ofproposed controller.
The rest of the paper is organized as follows. In Sec. 2,introduce the notations and briefly review the nonlinear dissitive control problem, the BHW controller formulas, and the proerties for the linearized model. In Sec. 3, the computational dculty encountered by the BHW controller formulas is revealed.Sec. 4, we propose a modified nonlinear dissipative controllersuccessfully remove the numerical difficulty. Furthermore,also show that the linear version of the proposed dissipative ctroller is identical to the DGKFH` controller. An illustrative ex-ample is included in Sec. 5. Finally, Sec. 6 gives the concludremarks.
2 Preliminaries
The Nonlinear Dissipative Control Problem. Consider thefollowing nonlinear input-affine generalized plantG:
G:H x5 f ~x!1g1~x!w1g2~x!uz5h1~x!1D12~x!uy5h2~x!1D21~x!w
(1)
wherexPRn is the state of the system,zPRp1 is the controlledoutput, wPRm1 is the exogenous input including all comman
ion
n,ir.
SEPTEMBER 2003, Vol. 125 Õ 475003 by ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

l
t
e
F
ieeo
n
-
in
is
e
-
onsg
the
ot
Down
and disturbances,uPRm2 represents the control input, andyPRp2 is the measured output. The problem is to find a contro
K:H j5AK~j!1BK~j!yu5CK~j!
(2)
such that the closed-loop system is stable andg- dissipative@9# or,equivalently, theL2 gain @2# of the system is less than or equalg, a given positive prescribed number.
The Hamiltonian Function. If the closed-loop system isgdissipative, there exists an energy functionE(x,j) such that thefollowing Hamiltonian function is nonpositive:
HAK ,BK ,CK~w,x,j!5izi22g2iwi21Ej~x,j!@AK~j!1BK~j!y!]
1Ex~x,j!@ f ~x!1g1~x!w1g2~x!u#
5h1T~x!h1~x!1CK
T~j!CK~j!1Ej~x,j!AK~j!
1Ej~x,j!BK~j!h2~x!
1Ej~x,j!BK~j!D21~x!w1Ex~x,j! f ~x!
1Ex~x,j!g1~x!w1Ex~x,j!g2~x!CK~j!
2g2wTw. (3)
Assumptions. As mentioned in Ref.@5#, the energy functionfor the derivation of the nonlinear dissipative controller canchosen as
E~x,j!5V~x!1W~x,j!. (4)
The following two sets are crucial to the problem:
~ i! Z«5$~x,j!:Ej~x,j!50%, (5)
~ ii ! NZª$~x,j!:j50%, (6)
whereZ« is a graph overX, n-dimensional Euclidean space fothe plant, i.e.,Z«5$„x,w(x)…:xPX% for some smooth functionw(x). The above two sets of the energy function are appliedderive the nonlinear dissipative controller formulas.
The generalized plant Eq.~1! is assumed to satisfy thfollowing:
~A1!~ f ,g2! is locally stabilizable and~ f ,h2! is locally detectable.
~A2 ! D12T ~x!@h1~x!D12~x!#5@0 I #,
~A3 ! F g1~x!
D21~x!GD21T ~x!5F0I G ,
~A4! f (0)50, h1(0)50, h2(0)50, AK(0)50, andCK(0)50.~A5! Energy functionE(x,j) is differentiable.~A6! Vectorsj andx are of the same dimension.~A7! Ej(x,j)uj5x50 andEjj(x,j)uj5x has full rank.~A8! j5w(x) is invertible.
Assumptions~A1!–~A3! are the nonlinear version of the DGKassumptions and are made for simplicity.~A4! is the homogeneitycondition. Assumption~A6! means the order of the controllerthe same as that of the plant.~A7! is made to ensure that thseparation principle@5# works.~A8! implies that there is no stablmode which is unobservable from the controlled output or unctrollable from the exogenous input for the linearized model@5#,which will be explained more clearly later in this paper. Asconsequence, nonlinear solutions linearizing to it will also hathe property near0. Whenw is invertible, the energy function cabe transformed through a change ofj coordinates so thatZ«5$(x,j):j5x%. Assumption~A8! is quite restrictive which canhardly be satisfied by many practical problems. The assumpwill be relaxed later.
BHW’s Nonlinear Dissipative Controller Formulas. Ball,Helton, and Walker’s~BHW! @5# solution to the nonlinear dissipative control problem is summarized in the following theorem
476 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ler
o
be
r
to
s
n-
ave
tion
.
Theorem 2.1Consider the nonlinear generalized plant definedEq. (1) which satisfies Assumptions (A1)–(A8). If there exists acontroller K of the form Eq. (2) such that the closed-loop systemstable andg- dissipative, then we have the following:(i) There exist X(x) and YI(x) such that the following twoHamilton-Jacobi inequalities
HJX~x!ªh1T~x!h1~x!12XT~x! f ~x!
1XT~x!@g22g1~x!g1T~x!2g2~x!g2
T~x!#X~x!<0
(7a)
and
HJYI~x!ªh1T~x!h1~x!2g2h2
T~x!h2~x!12YIT~x! f ~x!
1YIT~x!@g22g1~x!g1
T~x!#YI~x!<0 (7b)
are satisfied for all x in the domain of interest.(ii) Y I(x)2X(x) is the gradient of a positive function in thneighborhood of the equilibrium point.
Construction of the Nonlinear g-Dissipative Controller. Anonlinearg-dissipative controller can be constructed as
AK~j!5 f ~j!1g22g1~j!g1T~j!X~j!1g2~j!CK~j!2BK~j!h2~j!,
(8a)
CK~j!52g2T~j!X~j!, (8b)
whereBK(j) satisfies the following equation:
@YI~j!2X~j!#TBK~j!5g2h2T~j!. (8c)
Linearized Model, ARI’s, and ARE’s. Assume the equilib-rium point is atx50, the linearized model of the nonlinear generalized plantG described in Eq.~1! is represented by
G~s! l inear :H x5Ax1B1w1B2uz5C1x1D12uy5C2x1D21w
. (9)
To use a successive approximation algorithm for the solutiof the HJI’s in Eq.~7!, the first step is to solve their correspondinARI’s, i.e., to find X.0 and YI.0 so that the following threeinequalities are satisfied:
RicXªATX1XA1X~g22B1B1T2B2B2
T!X1C1TC1<0,
(10a)
RicYIªATYI1YIA1YI~g22B1B1T!YI1~C1
TC12g2C2TC2!<0,
(10b)
ZªYI2X.0. (10c)
Throughout the paperX(x) and YI(x) are vector functions ofxwhile X and YI are constant square matrices. Recall thatDGKF ~sub!optimal controller @1# can be obtained by solvingX`>0 andY`>0 from the following:
RicX`ªATX`1X`A1X`~g22B1B1T2B2B2
T!X`1C1TC150,
(11a)
RicY`ªAY`1Y`AT1Y`~g22C1TC12C2
TC2!Y`1B1B1T50,
(11b)
r~X`Y`!,g2. (11c)
The smallestg which satisfies Eq.~11!, denoted bygopt , is theoptimal H` norm of the closed-loop system.
The stabilizing solutionX` to Riccati equation Eq.~11a! ispositive semi-definite. A detectable (C1 ,2A) implies thatX` ispositive definite@10,11#. On the other hand, if (C1 ,2A) is notdetectable, thenX` is singular andA has stable modes that are n
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

Journal of Dyna
Downloaded 11 Nov 201
Table 1 Numerical difficulty in computing YI as « approaches to zero
« 102 1021 1025 10210
gopt 10.0494 2.7485 2.732053 2.732052g 10.05 2.76 2.74 2.74
YI F9.05 20.10
20.10 1.02G F2.74 20.42
20.42 150.7G F2.75 20.423
20.423 1.53106G F2.75 20.423
20.423 2.531011GBKL F16.3448
13.8371G F263.071.4605G F372.235
2.131024G F372.1612.131029G
o
o
i
r
o
e
-
-
s
stion
nical
at
ata-
observable fromC1 . Similarly, stabilizable (2A,B1) implies thatY` in Eq. ~11b! is positive definite. If (2A,B1) is not stabilizable,then Y` is singular andA has stable modes that are not contrlable from B1 . BHW assumed through Assumption~A8! that(C1 ,2A) is detectable and (2A,B1) is stabilizable; henceX`andY` are nonsingular, which is more restrictive than those csidered in DGKF.
3 Numerical Difficulty Encountered When „ÀA,B1…
Is UnstabilizableAs mentioned in the previous section, BHW’s nonlinear dis
pative controller formulas summarized in Theorem 2.1 were baon Assumption~A8! which implies that (C1 ,2A) is detectableand (2A,B1) stabilizable. The ARERicX50 in Eq. ~10a! haspositive semi-definite solution forX even (C1 ,2A) is undetect-able. However, if (2A,B1) is unstabilizable, then the ARERicYI50 in Eq. ~10b! has no positive semi-definite solution foYI . Although a positive definiteYI can always be found from analgebraic Riccati inequality, the solution is not unique. The bsolution occurs when the inequality approaches to equality. AsYIapproaches to the best solution, numerical difficulty arises.
A numerical example is given to demonstrate the numerdifficulty. One can use the linear matrix inequalities~LMI’s ! al-gorithms@12,13# to find a positive definite solution forYI or bysolving the following:
YIA1ATYI1YI@g22~B1B1T1«I !#YI1~C1
TC12g2C2TC2!50,
(12)
where« is a positive number.
A Numerical Example. Consider the following nonlineageneralized plant:
F x1
x2G5F1 0
0 21G Fx1
x2G1F2x1
2
x1x2G1F1 0
0 0G Fw1
w2G1F10Gu, (13a)
z5Fz1
z2G5F1 1
0 0G Fx1
x2G1F01Gu, (13b)
y5@1 0#Fx1
x2G1@0 1#Fw1
w2G . (13c)
It is easy to see that the linearized model at the equilibrium p0 is
F x1
x2G5F1 0
0 21G Fx1
x2G1F1 0
0 0Gw1F10Gu (14)
with the output equations forz andy unchanged as Eq.~13b! andEq. ~13c!.
mic Systems, Measurement, and Control
0 to 134.153.27.1. Redistribution subject to ASME lic
l-
n-
si-sed
r
est
cal
int
Let the structure of the controller for the linearized model b
Klinear~s!:H j5AKLj1BKLyu5CKLj
. (15)
The controller formulas in Eq.~8! can be simplified to the follow-ing linear dissipative controller:
AKL5A1B2CK2BKC21g22B1B1TX, (16a)
BKL5g2~YI2X!21C2T , (16b)
CKL52B2t X. (16c)
With X>0, a solution ofRicX50 in Eq. ~10a!, and YI.0, asolution of Eq.~12!, a linearg-dissipative controller can be constructed by Eq.~16!.
Let gopt be the smallestg that satisfies Eqs.~10a!, ~10c!, and~12!. In Table 1, we calculategopt and use a suitableg, which isslightly greater thangopt , to computeYI andBKL for four differ-ent « values ranging from 102 to 10210. A numerical difficultyarises when the value of« approaches to zero. As« decreases,some elements in the matrixYI become larger and the computation may not be reliable. When« is reduced to zero,YI becomesundefined. For a larger value of«, gopt is increased, which meanthe performance is worse.
4 Modified Nonlinear Dissipative Controller FormulasIn this section, we will modify the BHW’s controller formula
so that the numerical difficulty discussed in the previous seccan be eliminated.
Singular Y` Canonical Form. A similarity transformation isemployed to transform the system state equations into a canoform so that the subsystem causing trouble can be isolated.
Lemma 4.1Consider a linearized model defined as Eq. (9) thsatisfies the DGKF assumptions. If(2A,B1) is not stabilizable,then there exists an orthogonal similarity transformation thtransforms the original linearized model into the following cnonical form [10,11]:
F x1
x2G5FA11 A12
0 A22G Fx1
x2G1FB11
0 Gw1FB21
B22Gu, (17a)
F zyG5FC11 C12
C21 C22G Fx1
x2G1F 0
D21Gw1FD12
0 Gu, (17b)
where x1PRr and x2PRn2r . Note that x2 consists of the statesthat are stable and uncontrollable from w. Besides, Y` has thespecial form with Y11.0 as
Y`ªFY`11 0
0 0G (18)
in which the partition is compatible to that in Eq.~17a!.
SEPTEMBER 2003, Vol. 125 Õ 477
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

e
7he
t
h
ott
t
nt
and
e
assi-m-
ssi-
d a
Down
Modified Controller Formulas
Theorem 4.2 Consider the nonlinear generalized plant definin Eq. (1) which satisfies Assumptions (A1)–(A7) defined in Sec. 2and the linearized model is in the canonical form of Eq. (1If there exists a controller K of the form Eq. (2) such that tclosed-loop system is stable andg dissipative, then we have thfollowing:
(i) There exist X(x) and YH(x1) such that the following twoHJI’s:HJX~x!ªh1
T~x!h1~x!12XT~x!f~x!
1XT~x!@g22g1~x!g1T~x!2g2~x!g2
T~x!#X~x!<0 (19a)
andHJYH~x1!ªh1
T~x1,0!h1~x1,0!2g2h2T~x1,0!h2~x1,0!
12YHT ~x1! f ~x1,0!
1YHT ~x1!@g22g1~x1,0!g1
T~x1,0!#YH~x1!<0
(19b)are satisfied for all x in the domain of interest where X(x) can bepartitioned as
X~x!5FX1~x1,x2!
X2~x1,x2!G (19c)
according to the partition in Eq. (18) and YH(x1) has a structureas
YH~x1!ªF YI1~x1!
X2~x1,0!G . (19d)
(ii) The functionZ1~x1!ªYI1~x1!2X1~x1,0! (20)
is the gradient of a positive function in the neighborhood ofequilibrium point.
Construction of the Nonlinear g-dissipative Controller. Anonlinearg-dissipative controller can be constructed as
AK~j!5 f ~j!1g22g1~j!g1T~j!X~j!1g2~j!CK~j!2BK~j!h2~j!,
(21a)
BK~j!5FBK1~j1!
0 G , (21b)
CK~j!52g2T~j!X~j!, (21c)
whereBK1(j1) satisfies the following equation:
@YI1~j1!2X1~j1,0!#TBK1~j1!5g2h2T~j1,0!. (21d)
Remark 4.1
i. If ( 2A,B1) is stabilizable, thenx2 andj2 do not exist andx5x1 . Theorem 4.2 will collapse to Theorem 2.1, whichthe BHW’s controller@5#.
ii. The proof for Theorem 4.2 and construction of the nonlinedissipative controller is too lengthy to be included in tpaper; but it can be found in Ref.@14#.
iii. The result from Theorem 4.2 only guarantees local perfmance, although it presumably has better performancethe linear controller. However, for a definitive solutionthe global problem, the reader is referred to the workHelton and James@15#.
In the following, the linear version of the modified dissipativcontroller formulas will be presented. It is also shown thatlinear version of the proposed controller formulas is identicalthe DGKFH` controller @1#.
478 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
d
).e
he
is
are
r-hanoof
eheto
Linear Version of the Proposed Dissipative ControllerFormulas
Theorem 4.3Consider the linearized model of the nonlinear plain Theorem 4.2. There exists a linear controller Klinear(s) of theform in Eq. (15) such that the closed-loop system is stableg-dissipative if and only if there exist X>0 and YI11>0 such that
~ i ! ATX1XA1X~g22B1B1T2B2B2
T!X1C1TC1<0, (22a)
~ i i ! A11T YI111YI11A111YI11~g22B11B11
T !YI11
1~C11T C112g2C21
T C21!<0, (22b)
~ i i i ! YI112X11.0, (22c)
where
XªFX11 X12
X12T X22
G . (23)
Hence, a linearg-dissipative controller can be constructed by thfollowing formulas:
AKL5A1B2CK2BKC21g22B1B1TX, (24a)
BKL5Fg2~YI112X11!21C21
T
0 G , (24b)
CKL52B2TX. (24c)
Theorem 4.4The proposed linearg-dissipative controller in Eq.(24) is identical to the DGKF H controller.Proof: The DGKF H controller in Ref. [1] is given as
KDGKF~s!5F AD BD
CD 0 G , (25)
where
AD5A1g22B1B1TX`1B2CD2BDC2 , (26a)
BD5~ I 2g22Y`X`!21Y`C2T , (26b)
CD52B2TX` . (26c)
Using Eqs.~18!, ~23!, X5X` , andYI115g2Y`1121 , we have
BD5F I 2g22Y`11X11 *
0 IG21FY`11 0
0 0G FC21T
C22T G
5F ~ I 2g22Y`11X11!21 *
0 *G FY`11C21
T
0 G5F ~ I 2g22Y`11X11!
21Y`11C21T
0 G5Fg22~YI112X11!
21C21T
0 G5BKL . (27)
From Eqs.~24! and ~26!, it is easy to see thatCD5CKL andAD5AKL .
Next, an example is provided to demonstrate how to findsolution of the HJE’s and construct the proposed nonlinear dipative controller. The closed-loop pulse responses will be copared for three controllers: the proposed modified nonlinear dipative controller, a semi-nonlinear controller that is an Isidori@4#nonlinear dissipative controller with a linear observer gain, anlinear H` controller.
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

a
t
d
pro-re-ro-
d-uare
lers,ear
thattest,mi-
ear
pli-suredtheese is
thebe-n-
by
ro-of
Down
5 An Illustrative ExampleConsider the same nonlinear generalized plant in Eq.~13!. It is
easy to see that the linearized model at the equilibrium point0 isin the canonical form of Eq.~17!, and henceY` , the solution ofthe second ARE in Ref.@1#, is singular. Unfortunately, when wetry to apply the BHW’s nonlinear dissipative controller formulto solve the problem, numerical difficulties discussed in Secwill be encountered. The proposed modified nonlinear dissipacontroller formulas in Theorem 4.2 can be employed to resothe problem. In this example, withg53.5, we find the solutionsfor the ARE’s in Eq.~23! as
X5F2.5971 0.4193
0.4193 0.4193G and YI1154.7169. (28)
From the successive approximate solution methods provideRefs.@2#, @7#, we have the approximate solutions of the HJE’sthe following:The first-order approximation of the nonlinear solution~linearsolution!:
Fig. 1 The output responses of the closed-loop system due to0.5 square pulse inputs
Fig. 2 The output responses of the closed-loop system due to1.1 square pulse inputs
Fig. 3 The output responses of the closed-loop system due to1.3 square pulse inputs
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
s. 3ivelve
inas
X@1#~x!ªFX1@1#~x1 ,x2!
X2@1#~x1 ,x2!
G5XFx1
x2G5F2.5971x110.4193x2
0.4193x110.4193x2G(29a)
YI1@1#~x1!5YI11x154.7169x1 (29b)
The second-order approximation of the nonlinear solution:
X@2#~x!
ªFX1@2#~x1 ,x2!
X2@2#~x1 ,x2!
G5F2.5971x110.4193x221.8751x1
210.3830x1x210.0803x22
0.4193x110.4193x210.1915x1210.1606x1x220.0309x2
2G ,
(30a)
YI1@2#~x1!54.7169x113.4056x1
2. (30b)
The successive computation procedure can continue toduce higher-order approximations if higher accuracy isquired. Once the solutions of the HJE’s are found, the pposed nonlinear dissipative controllerK(AK ,BK ,CK) can be con-structed by
BK~j!5Fg2@YI1~j1!2X1~j1,0!#21j1
0 G , (31a)
CK~j!52g2T~j!X~j!52X1~j!, (31b)
and theAK(j) from Eq. ~21a!.Now, we will perform computer simulations for the close
loop system. Let the inputs to the closed-loop system be sqpulse functions in whichw1 and w2 in Eq. ~13! are defined asfollows:
H w15w25c, 0<t,1 sec
w15w250, t>1 sec, where c is a constant.
(32)
Then we will measure the pulse response atz1 in Eq. ~13b! of theclosed-loop system. First of all, let the pulse amplitudec50.5.The pulse responses corresponding to the three controlthe proposed nonlinear dissipative controller, the seminonlincontroller~with linear observer gain!, and the linearH` controller,are measured and plotted in Fig. 1. In Fig. 1, it can be seenthe closed-loop response for the nonlinear controller is the fashas the least overshoot and smallest settling time. The senonlinear controller is not as good but is better than the lincontroller.
The same simulation process is repeated with the pulse amtude increased to 1.1 and the three pulse responses are meaand plotted in Fig. 2. In Fig. 2, the closed-loop response forlinear controller is divergent. The nonlinear controller still dobetter than the semi-nonlinear controller. If the pulse amplitudincreased even larger to 1.3, then in Fig. 3 we can see thatclosed-loop response for the seminonlinear controller alsocomes divergent while the one with nonlinear controller still coverges to zero after 3 sec.
6 ConclusionsIn this paper, the computational difficulty encountered
BHW’s controller formulas when (2A,B1) is unstabilizable wasaddressed. A modified nonlinear dissipative controller was pposed to eliminate the numerical difficulty. The linear version
SEPTEMBER 2003, Vol. 125 Õ 479
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

srt
n
no
ta
d
n
fn
r
n
inin
ionap-ct-oth-ple
tionde-
m-g
duc-
rs introln-
ons
am-
,is
,amon
ons
T
nal
Down
the proposed controller was shown to be identical to the DGcontroller. An example was given to demonstrate how to findlutions for the HJE’s and construct a nonlinear dissipative contler. Simulations of closed-loop pulse responses for three conlers were performed and it is found that the proposed nonlindissipative controller has better performance than the seminoear controller and the linearH` controller.
AcknowledgmentsThe authors are grateful to the NASA Langley Research Ce
and the Boeing Company, for partial financial support under Ctract Nos. NCC-1-224 and NAS1-20220, respectively.
Nomenclature
ARE 5 algebraic Riccati equationARI 5 algebraic Riccati inequality
BHW 5 Ball, Helton, and WalkerHJE 5 Hamilton-Jacobi equationHJI 5 Hamilton-Jacobi inequalityRn 5 n-dimensional Euclidean spaceEx 5 the derivative ofE with respect tox, i.e., Ex
5@]E/]x1 ....]E/]xn#ixi2 5 the squared Euclidean norm, which equalsxTx
r(A) 5 the spectral radius of a matrixA
References@1# Doyle, J. C., Glover, K., Khargonekar, P. P., and Francis, B. A., 1989, ‘‘S
Space Solutions to StandardH2 and H` Control Problems,’’ IEEE Trans.Autom. Control,34, pp. 831–846.
@2# Van der Schaft, A. J., 1992, ‘‘L2-Gain Analysis of Nonlinear Systems anNonlinearH` Control,’’ IEEE Trans. Autom. Control,37, pp. 770–784.
@3# Van der Schaft, A. J., 1996,L2-Gain and Passivity Techniques in NonlineaControl, Springer, London.
@4# Isidori, A., and Astolfi, A., 1992, ‘‘Disturbance Attenuation andH`-ControlVia Measurement Feedback in Nonlinear Systems,’’ IEEE Trans. Autom. Ctrol, 37~9!, pp. 1283–1293.
@5# Ball, J. A., Helton, J. W., and Walker, M. L., 1993, ‘‘H` Control for Non-linear Systems with Output Feedback,’’ IEEE Trans. Autom. Control,38, pp.546–559.
@6# Wise, K. A., and Sedwick J. L., 1994, ‘‘Successive Approximation Solutionthe HJI Equation,’’Proceedings of the 33rd IEEE Conference on Decision aControl, Lake Buena Vista, Florida, U.S.A., pp. 1387–1391.
@7# Hu, S. S., Yang, P. H., and Chang, B. C., 1999, ‘‘A Successive AlgorithmSolving the Hamilton-Jacobi Equations,’’Proceedings of the 1999 AmericaControl Conference, San Diego, California, U.S.A., pp. 2842–2846.
@8# Hu, S. S., Yang, P. H., and Chang, B. C., 1998, ‘‘A Computational IssueNonlinearH` Control,’’ Proceedings of the 1998 American Control Confeence, Philadelphia, Pennsylvania, U.S.A., pp. 3744–3745.
@9# Hu, S. S., Chang, B. C., Yeh, H. H., and Kwatny, H. G., 2000, ‘‘RobuNonlinear Controller Design for a Longitudinal Flight Control Problem,’’ thAsian Journal of Control,2~2!, pp. 111–121.
@10# Petersen, I. R., Anderson, B. D. O., and Jonckheere, E. A., 1991, ‘‘A FPrinciples Solution to the Non-singularH` Control Problem,’’ Int. J. RobustNonlinear Control,1, pp. 171–185.
@11# Postlethwaite, I., Gu, D.-W., and O’Young, S. D., 1988, ‘‘Some ComputatioResults on Size Reduction inH` Design,’’ IEEE Trans. Autom. Control,33,pp. 177–185.
@12# Boyd, S., Ghaoui, L. E., Feron, E., and Balakrishnan, V., 1994,Linear MatrixInequalities in System and Control Theory, SIAM, Philadelphia.
@13# Gahinet, P., Nemirovski, A., Laub, A. J., and Chilali, M., 1995,LMI ControlToolbox User’s Guide for MATLAB, the MathWoks, Inc.
@14# Hu, Shr-Shiung, 1998,Computational Issues in the Design of Robust Nonlear Controllers, Ph.D. dissertation, Department of Mechanical Engineerand Mechanics, Drexel University, U.S.A.
@15# Helton, J. W., and James, M. R., 1999,Extending H Control to NonlinearSystems: Control of Nonlinear Systems to Achieve Performance Objec,SIAM, Philadelphia.
480 Õ Vol. 125, SEPTEMBER 2003 Copyright
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
KFo-ol-rol-earlin-
tern-
te
r
on-
ofd
or
in-
ste
irst
al
-g
tive
A Variable-Speed Method forReducing Residual Vibrations in ElasticCam-Follower Systems
Yan-An YaoAssociate ProfessorDepartment of Mechanical Engineering,Northern Jiaotong University, Beijing 100044
Hong-Sen YanProfessorDepartment of Mechanical Engineering,National Cheng Kung University, Tainan 70101, Taiwan
Ce ZhangProfessorSchool of Mechanical Engineering, Tianjin University,Tianjin 300072
This paper applies the concept of variable speeds to vibratcontrol of elastic cam-follower systems. A multi-design-pointproach, based on optimal control theory, is developed for seleing suitable input speed functions of the cam that can reduce bprimary and residual vibrations of the output in elastic camfollower systems despite parameter variations. A design examis given to verify the feasibility of the approach.@DOI: 10.1115/1.1591811#
1 IntroductionA cam is normally operated at a constant speed and the mo
states of the output are determined once the cam profile issigned. However, Yan et al.@1,2# and Yao et al.@3#, from thekinematic point of view, proposed an alternative method for iproving motion characteristics of the follower by actively varyinthe input speed of the cam.
This paper applies the concept of variable speeds to the retion of vibrations in elastic cam-follower systems. Sandler@4#designed an additional control system to reduce dynamic errocam mechanisms. Inspired by the applications of optimal contheory@5,6#, a multi-design-point approach based on optimal cotrol theory is developed for designing cam input speed functithat reduce residual vibrations of the output.
2 Dynamic EquationFigure 1 shows a lumped-parameter model of an elastic c
follower system. By defining the normalized parameters~T, nor-malized time;Q, S and Sa , normalized displacements of camfollower and output!, the normalized system governing equationfound as:
Sa12j~2pl!Sa1~2pl!2Sa5~2pl!2S (1)
wherel denotes the ratio of cam rise time to natural periodjdenotes the damping ratio. In what follows, the design of cspeed functions in rise travel of a Dwell-Rise-Dwell cam motiis to be discussed.
3 Multi-Design-Point ApproachThe approach is devoted to the reduction of residual vibrati
at n (n>1) design points:l i( i 51,2, . . . ,n). Defining the statevariables as:
Contributed by the Dynamic Systems, Measurement, and Control Division ofHEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division April 21, 2001; firevision, December 21, 2003. Associate Editor: C. Rahn.
© 2003 by ASME Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

edhich
le:
ent
Down
XT5@X1 ,X2 ,X3 ,¯,X2i ,X2i 11 ,¯,X2n ,X2n11#T
5@Q,S1a ,V1a ,¯,Sia ,Via ,¯,Sna ,Vna#T (2)
whereSia , Via are displacement and velocity of the output atl i
respectively. The control variable is selected as:u5Q, and thestate equation is:
X5 f ~X,u,T!
53uX3
~2pl1!2F~X1!2~2pl1!2X222j~2pl1!X3
¯
X2i 11
~2pl i !2F~X1!2~2pl i !
2X2i22j~2pl i !X2i 11
¯
X2n11
~2pln!2F~X1!2~2pln!2X2n22j~2pln!X2n11
4 (3)
The boundary conditions are:
X~0!50, X~1!51 (4)
The cost function is defined as:
P5w1@X1~1!21#21w2@X2~1!21#21w3@X3~1!#21¯
1w2i@X2i~1!21#21w2i 11@X2i 11~1!#21¯
1w2n@X2n~1!21#21w2n11@X2n11~1!#2
1w2n12E0
1
@u21#2dT (5)
where the first item satisfies the boundary conditionX(1)51, thelast item limits the cam speed variation, and the other itemsduce residual vibrations,wi( i 51,2, . . . ,2n12) are weightingfactors.
Define the Hamiltonian as:
H~X,m,u,T!5w2n12@u21#21mTf ~X,u,T! (6)
where the co-state vectormPR2n12.The transversality conditions are:
m~1!53m1~1!
m2~1!
m3~1!
]
m2i~1!
m2i 11~1!
]
m2n~1!
m2n11~1!
4 532w1@X1~1!21#
2w2@X2~1!21#
2w3@X3~1!#
]
2w2i@X2i~1!21#
2w2i 11@X2i 11~1!#
]
2w2n@X2n~1!21#
2w2n11X2n11~1!
4 (7)
Fig. 1 Dynamic model of a cam-follower system
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
re-
From the control equation yields:
]H/]u52w2n12~u21!1m1. (8)
From the co-state equation yields:
m53m1
m2
m3
]
m2i
m2i 11
]
m2n
m2n11
4 532(
i 51
n
m2i 11~2pl i !2F8~X1!
m3~2pl1!2
2m21m32j~2pl1!
]
m2i 11~2pl i !2
2m2i1m2i 112j~2pl i !
]
m2n11~2pln!2
2m2n1m2n112j~2pln!
4 (9)
The resulting two-point boundary-value problem can be solvby the Gradient method and the conjugate Gradient method wis used near the optimal solution to accelerate convergence.
An example is given to illustrate the approach. Cam profiS(Q)510Q3215Q416Q5 ~3-4-5 polynomial!; Design points:l i53.25,l i53.50,l i53.75; Damping ratio:j50.0 ~To simplifythe analysis, viscous friction is neglected, which will not presany loss of generality in the procedure!; Weighting factors:wi51000.0,wi51.0 (i 52,3,4,5,6,7),w850.1. The resulting camspeed function and the dynamic response spectrums~DRS! ofoutput displacement are shown in Figs. 2 and 3, respectively.
Fig. 2 Cam speed function
Fig. 3 Dynamic response spectrum „DRS… of output dis-placement „a… DRS of primary vibrations; „b… DRS of residualvibrations
SEPTEMBER 2003, Vol. 125 Õ 481
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

e
yole
f
h
a
ste
sll
K
redma-andtion.ingtem
tedistic
onors.e-sti-ob-
ter--heirlity
asedxis-tri-
ionin-
-m
mssedthede-
the
ian
.n-
ean
zero
s.
favail-dis-
usedm.is
‘‘
is
nt
T
n
Down
It can be observed that the residual vibrations in the band610% surrounding the design point,l53.5, are substantiallyminimized. This means this system is strongly insensitiveparameter variations. It is also shown that this cam speed funcalso reduces primary vibrations, which is not our originobjective.
4 ConclusionsThis work aims to explore the possibility of applying a pr
designed cam input speed function to reduce residual vibrationelastic cam-follower systems. Based on optimal control theormulti-design-point approach for designing cam speed functiwas developed, which can reduce both primary and residuabrations despite parameter variations. Technically, either a scontrol system or a noncircular gear drive may be used to genethe desired cam speed functions.
References@1# Yan, H. S., Tsai, M. C., and Hsu, M. H., 1996, ‘‘A Variable-Speed Method
Improving Motion Characteristics of Cam-Follower Systems,’’ ASMEMech. Des.,118, pp. 250–257.
@2# Yan, H. S., Tsai, M. C., and Hsu, M. H., 1996, ‘‘An Experimental Study of tEffects of Cam Speeds on Cam-Follower Systems,’’ Mech. Mach. Theory,31,pp. 397–412.
@3# Yao, Y. A., Zhang, C., and Yan, H. S., 2001, ‘‘Motion Control of Cam Mechnisms,’’ Mech. Mach. Theory,35, pp. 593–607.
@4# Sandler, B., 1980, ‘‘Adaptive Mechanisms~Automatic Vibration Contro!,’’ J.Sound Vib.,73, pp. 161–175.
@5# Chew., M., Freudenstein, F., and Longman, R. W., 1982, ‘‘Application of Otimal Control Theory to the Synthesis of High-Speed Cam-Follower SystemASME 82-DET-100, 82-DET-101.
@6# Yamada, I., and Nakagawa, M., 1985, ‘‘Reduction of Residual VibrationsPositioning Control Mechanism,’’ ASME J. Vib. Acoust. Stress Reliab. De107, pp. 47–52.
Filtering of Linear Systems WithUnknown Inputs
Hosam E. Emara-ShabaikSystems Engineering Department, KFUPM,Dhahran 31261, Saudi Arabiae-mail: [email protected]
State estimation of linear systems under the influence of bothknown deterministic inputs as well as Gaussian noise is conered. A Kalman like filter is developed which does not requireestimation of the unknown inputs as is customarily practicTherefore, the developed filter has reduced computational requments. Comparative simulation results, under the influencevarious types of unknown disturbance inputs, show the meritthe developed filter with respect to a conventional Kalman fiusing disturbance estimation. It is found that the developed fienjoys several practical advantages in terms of accuracy andtracking of the system states.@DOI: 10.1115/1.1591804#
Keywords: Unknown Input, Gaussian Noise, Linear Systems,man Filter
1 IntroductionDynamic systems are often subjected to unknown disturba
inputs which can originate from various sources. Among su
Contributed by the Dynamic Systems, Measurement, and Control Division ofHEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division July 5, 2000; firevision, February 21, 2003. Associate Editor: S. D. Fassois.
482 Õ Vol. 125, SEPTEMBER 2003 Copyright
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
of
totional
-s in, ansvi-rvorate
orJ.
e
-
p-s,’’
ins.,
un-id-hed.
ire-ofof
terterfast
al-
ncech
sources are, for example, modeling errors resulting from ignosystem dynamics, nonlinear effects and the resulting approxition errors due to linearization, unmeasurable external inputs,equipment failures, e.g., sensors drift and/or actuator saturaSuch unknown disturbance inputs are, in general, time varyand must be accounted for properly when estimating the sysstates.
The problem of state estimation of linear systems subjecto unknown inputs has been mainly considered in a determinsetting. Methods for reduced order observers design basedLuenberger’s observer theory have been given by several authKudva et al.@1# presented a methodology for the design of rduced order Luenberger observer which asymptotically emates some of the system states. Existence conditions of theserver were given in terms of the zeros of the system’s characistic polynomial. Guan, and Saif@2# gave a procedure for designing reduced order observers based on pole placement. Texistence conditions were given in terms of the observabiconditions of the transformed system. Also, Hou, and Muller@3#gave a design procedure for reduced order state observer bon the Luenberger theory. They developed the observer etence conditions on the basis of rank conditions of special maces of the original system. Recently, Gaddouna et al.@4# ap-plied the unknown input observer technique for fault detectin linear systems. Estimation of the unknown inputs in determistic setting were also reported,@3#, and @5#. Such estimates require either differentiating, or forward differencing the systemeasurements.
In this paper, the problem of state estimation of linear systeunder the influence of unknown deterministic inputs is addresin a stochastic setting. A filter is developed which estimatesstates without the need to estimate the unknown inputs. Theveloped filter is tested by simulation against other filters andresults are reported.
2 Statement of the ProblemConsider a stochastic linear dynamic system as follows:
x~ t11!5Ax~ t !1Bd~ t !1Gw~ t ! (1)
y~ t !5Cx~ t !1v~ t ! (2)
where,
x(t)PRn : is the system state.x(0)PRn : is the system initial state, considered as Gauss
with zero mean and covarianceP0 .y(t)PRm : is the vector of available system’s measurementsd(t)PRl : is a vector of unknown deterministic disturbance i
puts acting on the system.w(t)PRp : is independent Gaussian system noise of zero m
and covarianceQ(t).v(t)PRm : is independent Gaussian measurements noise of
mean and covarianceR(t).A,B,G,C : are known real matrices of appropriate dimension
It is assumed that,w(t), v(t), and x(0) are independent oeach other. The system state is to be estimated based on theable measurements despite the existence of the unknownturbance acting on the system. Such an estimate may befor feed back control or for operation monitoring of the systeFor the case whered(t) is identically zero, such an estimateprovided by the well known Kalman filter~KF!. A standard con-dition for the existence of the KF is the observability of the pairA,C, ’’ Brown and Hwang@6#, and Gelb@7#. In the treatment ofthis paper the observability condition is assumed fulfilled. Itfurther assumed that the matrix ‘‘B’’ is of full column rank, thematrix ‘‘C’’ is of full row rank, and thatl ^min(m,n). The follow-ing result from matrix theory is required for further developmein this paper.al
© 2003 by ASME Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

n
.
for
d tolter-ntsin-
a
Down
Corollary 1 Let B be an (nxl) real matrix, there exists an (nxnonsingular real matrix U such that,
UB5F B0G
with rank(B)5rank(B).The proof of this corollary follows directly from a well known
theorem on matrix singular value decomposition~SVD!.The direct consequence of applying this corollary is the tra
formation of the system given by,~1!, and~2! into the followingform.
Fzd~ t11!
zf~ t11! G5FF1 F2
F3 F4G Fzd~ t !
zf~ t ! G1F B0Gd~ t !1FG1
G2Gw~ t ! (3)
y~ t !5F C1 C2GFzd~ t !zf~ t ! G1v~ t ! (4)
where,
zd(t)PRl : is the partial state which is directly influenced bthe disturbance.
zf(t)PRn2 l : is the partial state which is not directly influenceby the disturbance.
And,
FF1 F2
F3 F4G[F5UAU21, F B
0G5UB, FG1
G2G5UG,
@C1 C2#[C5CU21, Fzd~ t !zf~ t ! G5Ux~ t !.
It is important to note that the observability of the systempreserved under the above transformation, i.e.,
rank~O~C,F !!5rank~O~C,A!!5n
where, ‘‘O(C,A)’’ is the observability matrix of the pair ‘‘C,A, ’’Kailath @8#.
Further, a nonsingular matrix ‘V’ exists which allows the sys-tem measurements~4! to be transformed into the following form
F y1~ t !
y2~ t !G5FC11 C12
0 C22G Fzd~ t !
zf~ t ! G1F v1~ t !
v2~ t !G (5)
where,
FC11
0 G5VC1, FC12
C22G5VC2,
F y1~ t !
y2~ t !G5Vy~ t !, and F v1~ t !
v2~ t !G5Vv~ t !,
Fig. 1 First state and estimates
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
)
ns-
y
d
is
And, C11: is of full column rank ‘‘l . ’’
Let, @0C11
C22
C12 #[C, it is necessary to mention that,
rank~O~C,F !5rank~O~C,F !!5n
Therefore, the system observability is preserved.
3 Filter DevelopmentReferring to~5!, zd(t) is expressed as follows:
zd~ t !5C1121@y1~ t !2C12zf~ t !2v1~ t !# (6)
The generalized inverse ofC11 can be used in Eq.~6! for thecase of nonsquare matrix. Substitutingzd(t) from Eq.~6! into Eq.~3! one obtains the following disturbance decoupled subsystemzf(t),
zf~ t11!5Afzf~ t !1Bfy1~ t !1Gfw~ t ! (7)
y2~ t !5Cfzf~ t !1v2~ t ! (8)
where, Af5@F42F3C1121C12#, Bf5F3C11
21, Gf5@G2
2F3C1121#, Cf5C22, andw(t)5@v1(t)
w(t)#.
It is to be noticed that since the measurements are usedecouple the directly disturbance-influenced states and for fiing, it will be necessary to have the number of measuremegreater than the number of independent unknown disturbanceputs acting on the system, i.e.,m. l .
The minimum variance estimatezf(t) of zf(t) is given by theconditional expectation as follows:
zf~ t !5E$zf~ t !/y2~ t !%
And based on Eqs.~7! and~8!, such estimate is generated byKalman filter as follows:
zf~ t11!5Afzf~ t !1Bfy1~ t !1K~ t11!@y2~ t11!
2CfAf zf~ t !2CfBfy1~ t !# (9)
Pf~ t11!5@Af Pf~ t !AfT1Qf #, Pf~0!5P0 (10)
Pf~ t11!5 Pf~ t11!2 Pf~ t11!CfT@Cf Pf~ t11!Cf
T
1R2#21Cf Pf~ t11! (11)
K~ t11!5Pf~ t11!CfTR2
21 (12)
The minimum variance estimatezd(t) of zd(t) is given by
Fig. 2 Second state and estimates
SEPTEMBER 2003, Vol. 125 Õ 483
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

rter
heti-to as
ingis
oftate
ingingdve
45
45
Down
zd~ t !5E$zd~ t !/ y~ t !%
And, according to Eq.~6! we have
zd~ t !5C1121@y1~ t !2C12zf~ t !# (13)
And, its conditional covariance
Pd~ t !5E$~zd~ t !2 zd~ t !!~zd~ t !2 zd~ t !!T/ y~ t !%
is given by
Pd~ t !5C1121C12Pf~ t !C12
TC1121T
1C1121R1~ t !C11
21T
(14)
where,R1(t) is the covariance of the noise termv1(t).For the original system, given by~1!, and ~2!, the state esti-
mates are now given by
Fig. 3 Third state and estimates
Fig. 4 Fourth state and estimates
Fig. 5 Fifth state and estimates
Fig. 6 Disturbance and estimate
484 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
x~ t !5U21F zd~ t !zf~ t ! G (15)
And, the state estimate covariance matrix is given by
P~ t !5U21FPd~ t ! L~ t !
LT~ t ! Pf~ t !GU21T
, L~ t !52C1121C12Pf~ t !
(16)
The above equations,~9!–~16!, constitute the developed filtewhich is referred to here as the Unknown Input Kalman Fil~UIKF!.
4 Simulation ResultsIn this section the performance of the developed filter~UIKF! is
illustrated and compared to two other filters via simulation. Tfirst filter is a standard Kalman filter which simultaneously esmates the states and the unknown disturbance, and is referred~DEKF!. The second filter, is also a standard Kalman filter havexact knowledge of the deterministic disturbance input, andreferred to as~DNKF!. The system considered is composedcoupled two masses with a first-order dynamic actuator. In sspace form the system is described by Eqs.~1! and~2!, where thesystem matrices are as follows:
A530 1 0 0 0
22 21 1 0 1
0 0 0 1 0
1 0 21 21 0
0 21 0 0 0
4 , B5F 0
10
0
0
0
G ,
C5F0 1 0 21 0
0 0 1 0 0G , G510I 5X5 , Q50.09I 5X5 ,
P052.25I 5X5 , R52.25I 2X2
This system has its poles at ‘‘20.56 j 1.7788, 20.56 j 0.5795, 0.0.’’ The system is converted to a discrete form usa sampling period of ‘‘0.1’’ second. The disturbance estimatKalman filter ~DEKF! is a standard Kalman filter, Brown anHwang@6#, and Gelb@7#, which is based on augmenting the abosystem with
d~ t11!5d~ t !1w3~ t !
Table 1 RMSE, Case I
Filter\State x1 x2 x3 x4 x5
UIKF 2.0952 1.7849 0.3739 1.2228 2.885DEKF 7.3258 5.5123 1.3280 4.5794 5.485
Table 2 RMSE, Case II
Filter\State x1 x2 x3 x4 x5
UIKF 2.0952 1.7849 0.3739 1.2228 2.885DEKF 6.1661 4.8294 1.1313 3.8191 4.931
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

n
ea
ss
re
t
r
e
s
flw
n
lsea
s
L
m
vo,
w
a
wea-
s oflawass-
r-
eeledns.om-ium
-ol off the
In-o
ws.ari-eachviantallrna-use
eFTler
isnvex
T
nal
Down
where, the independent noise termw3(t) is taken as zero meaGaussian with variance of ‘‘0.01.’’ Two cases for the disturbaninput being considered are as follows.
Case I: A square wave disturbance of magnitude 2.0 andperiod of 32 samples. The state estimates for this case arshown in Figs. 1–5, where the solid line designates the estimof the ~UIKF!, the dashed line is for the~DEKF!, and the smallcircle designates the estimates of the~DNKF!. The disturbanceestimate of the~DEKF! is shown by dashed line in Fig. 6 againthe true disturbance. The~DNKF! represents the ideal conditionand therefore, it is taken as the reference of comparison forother two filters. Table 1, gives the root mean square er~RMSE! of the ~UIKF! and the~DEKF! state estimates using thstate estimates of the~DNKF! as reference.
Case II:A two sinusoids disturbance as follows:
d~ t !52.0 sin~wt!11.5 sin~2wt!
with a fundamental period of 32 samples. The root mean squestimation errors for this case are as given in Table 2.
It is clear from the results, shown in the figures and tables,the ~UIKF! provides faster and more accurate tracking of the stem states. In comparison, the estimates of the~DEKF!, althoughsometimes smoother, they are much delayed and are ordemagnitude less accurate than those of the~UIKF!. Moreover, com-parison of the RMSE, show the~UIKF! to be less sensitive to thtype of disturbance acting on the system than the~DEKF!. Theestimation of the unknown disturbance input depends on thetem structure, the influence of the disturbance on the states,the measurement scheme. Therefore, the detectability of theturbance is function of the triplet$A,B,C%.
5 ConclusionThe state estimation problem of linear dynamic systems in
enced by both unknown deterministic disturbance inputs, asas random noise is treated. A new filter is developed which pvides full state estimation and does not require the estimatiothe unknown inputs. The developed filter provides faster and maccurate tracking of the system states than the augmented Kafilter which requires the estimation of the disturbance input. Althe estimation accuracy of the developed filter is less sensitivthe type of disturbance acting on the system than the disturbestimating Kalman filter. Moreover, the developed filter has coputational advantages as it does not rely on estimating the dibance inputs.
AcknowledgmentThe support of KFUPM is acknowledged.
References@1# Kudva, P., Viswanadham, N., and Ramakrishna, A., 1980, ‘‘Observers for
ear Systems with Unknown Inputs,’’ IEEE Trans. Autom. Control,AC-25, No.1, pp. 113–115.
@2# Guan, Y., and Saif, M., 1991, ‘‘A Novel Approach to the design of UnknowInput Observers,’’ IEEE Trans. Autom. Control,AC-36, No. 5, pp. 632–635.
@3# Hou, M., and Muller, P. C., 1992, ‘‘Design of Observers for Linear Systewith Unknown Inputs,’’ IEEE Trans. Autom. Control,AC-37, No. 6, pp. 871–875.
@4# Gaddouna, B., Maquin, D., and Ragot, J., 1994, ‘‘Fault Detection Obserfor Systems with Unknown Inputs,’’ Safeprocess’94, IFAC/IMACS Sympsium on Fault Detection, Supervision and Safety for Technical Processespoo, Finland.
@5# Maquin, D., Gaddouna, B., and Ragot, J., 1994, ‘‘Estimation of UnknoInputs in Linear Systems,’’ Proceedings of the American Control ConferenBaltimore, MD, USA.
@6# Brown, R. G., and Hwang, P. Y. C., 1997,Introduction to Random Signals andApplied Kalman Filtering, John Wiley & Sons, Inc., New York.
@7# 1974,Applied Optimal Estimation, edited by Gelb, A., The M.I.T. Press, Cambridge, Massachusetts.
@8# Kailath, T., 1980,Linear Systems, Prentice-Hall, Inc., Inglewood Cliffs, N.J.
Journal of Dynamic Systems, Measurement, and ControlCopyright © 2
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ce
aas
tes
t,theors
are
hatys-
s of
ys-anddis-
u-ell
ro-of
oremano,to
ncem-tur-
in-
n
s
ers-Es-
nce,
-
Output Feedback Linear ParameterVarying „LPV … L2-gain Control
Boe-S. HongMechanical Engineering Department, National ChungCheng University, Chia-Yi 621, Taiwan, Republic of Chin
Asok Ray*e-mail: [email protected]
Vigor Yang
Mechanical Engineering Department, The PennsylvaniaState University, University Park, PA 16802, USA
This brief paper synthesizes an output feedback L2-gain Controllaw for linear parameter varying (LPV) systems. The control lais embedded with an observer that does not require on-line msurements of the scheduling parameter variation rate. Resultsimulation experiments are presented to evaluate the controlon a simulation experiments on a two-degree-of-freedom mspring-damper system.@DOI: 10.1115/1.1591805#
Keywords: Linear Parameter Varying Control, ObserveEmbedded Synthesis, Linear Matrix Inequalities
IntroductionDynamical systems often involve transients at different tim
scales. For control synthesis, the plant dynamics can be modby superposition of fast-time motions over the slow-time motioFurthermore, the two-time scale dynamics can often be decposed into fast-time perturbation over a quasi-steady equilibrtrajectory~Tan et al., 2000@1#; Giannelli and Primbs, 2000@2#!.The Linear Parameter Varying~LPV! approach is suitable for twotime scale processes under wide range operation where contrthe fast-time scale dynamics is gain-scheduled as a function oslow-time scale parameters~Packard, 1994@3#; Hong et al., 2000@4#!. From the numerical perspectives using Linear Matrixequalities~LMIs!, the LPV synthesis can be classified into twbroad categories:Algebraicanddifferential. A brief discussion onthe present status of LPV control in these two categories follo
Traditional gain-scheduling approximates each scheduling vable as a series of steps within the operating range and forstep a corresponding control/observing law is synthesizedthose LMI approaches which are usually for linear time invariasystems. This approach theoretically allows infinitesimally smparameter variation rates under wide-range operation. An altetive algebraic approach for LMI-based LPV synthesis makesof the Linear Fractional Transformation~LFT! representation withan internally time-varying couplingD-feedback-connected to thnominal plant. For such an LPV plant, the controller has the Lstructure with aD-dependent feedback to the nominal control~Tan et al., 2000@5#; Apkarian et al., 2000@6#, for example!. An-other approach to algebraic LMI-based LPV synthesis, whichsuitable for affine-parameter-dependent systems, uses a cohull to contain the operation domain~Gahinet et al., 1994@7#,Bara et al., 2000@8#!. A sufficient condition for robust perfor-
*Corresponding Author.Contributed by the Dynamic Systems, Measurement, and Control Division ofHE
AMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division July 28, 2000; firevision, December 9, 2002. Associate Editor: P. Voulgaris.
SEPTEMBER 2003, Vol. 125 Õ 485003 by ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

r
V
a
at
h
-
e
trol
ixis-
n-
Down
mance is achieved within the operation domain by considealgebraic LMI solutions at all vertices of the convex hull. Theapproaches to LPV synthesis allow infinite variation rate of schuling parameters within a narrow operating range.
Differential LMI-based LPV synthesis have been reportedseveral investigators including Wu et al.~1996! @9#, Wu ~2000!@10#, and Tan and Grigoriadis~2000! @5#, as extensions of thestandard LMI synthesis procedure~Gahinet and Apkarian, 1994@11#, for example!. In contrast to the algebraic LMI-based LPsynthesis, the differential LMI-based LPV synthesis allows a finparameter variation rate for wide-range operation.
This brief paper presents an observer-embedded LPVL2-gaincontrol law following the LPV synthesis reported by Hong et~2000! @4#. The proposed control law allows parameterizationfeasible state feedback and state estimation in an observer-bcontrol setting. Compared to other types of LPV synthesisdressed above, the main motivation of the work reported inpaper is to develop an LPVL2-gain control law that providesplant state estimation and does not require on-line informationparameter variation rates.
Observer-Embedded LPV L2-Gain Control SynthesisLet the generalized model of a linear parameter varying~LPV!
plant be represented as:
x5A~p!x1B1~p!w1B2~p!u
z5C1~P!x1D11~p!w1D12~p!u (1)
y5C2~p!x1D21~p!w1D22~p!u
with the L2-gain performance specification:
E0
T
izi2dt,g2E0
T
iwi2dt ;T.0;w; x~0!50 (2)
Without loss of generality, the following simplifying assumptionare made to communicate the main theme of the work reportethis paper:
• The scheduling parameterp is one-dimensional;• g51, D1150, C1
TD1250, D12T D125I , D21B1
T50,D21D21
T 5I , D2250.
The first assumption is extendable to a~multidimensional! gainscheduling parameter vector at the expense of additional numcal complexity. The second set of assumptions can be removea series of transformations among state, inputs and outputs.
Let us start with full state feedback control and define a Hamtonian functionH as:
H~x,u,w,p!5V1izi22iwi2 (3)
whereV(x,p) is a positive-definite function that stores the infomation of the current state. If the following two conditions on tHamiltonianH, for ]2H/]w]u50, hold:
]H
]u~u5u* !50;
]2H
]2u~u5u* !.0; (4)
]H
]w~w5w* !50;
]2H
]2w~w5w* !,0, (5)
with the minimum control u* and themaximum disturbance w* ,then
H~x,u* ,w* ,p!,0, (6)
implies thatH(x,u* ,w,p),0 ;w. This renders the following in-equality:
486 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ingseed-
by
ite
l.ofasedd-
his
of
sd in
eri-d by
il-
r-e
E0
T
izi2dt,E0
T
iwi2dt1V~x~0!!2V~x~T!!
,E0
T
iwi2dt ;T.0;w,
that is identical to the performance specification in Eq.~2!.If the storage functionV(x,p) is structured to be positive qua
dratic as:
V~x,p!5xTX~p!x; X5XT.0 ;p, (7)
then the Hamiltonian functionH(x,u,w,p) becomes
H~x,u,w!5xTp]X
]px12xTX~Ax1B1w1B2u!1xTC1
TC1x
1uTu2wTw. (8)
Combining Eqs.~4! and ~5! with Eq. ~8! yields:
u* 52B2TXx; w* 5B1
TXx (9)
and then substituting Eq.~9! into Eq. ~8! yields
H~x,u* ,w* ,p!5xTQXx,
QX[ p]X
]p1ATX1XA1C1
TC12XB2B2TX1XB1B1
TX, (10)
If QX,0 ;p, then Eq.~6! is satisfied and so is the performancspecification in Eq.~2!.
Now let us consider the synthesis of the output feedback conwith an embedded observer designed as:
x65Ax1B1w* 1B2u1ZC2T~y2C2x! (11)
that is structurally similar to the Kalman filter where the matrZ(p) is yet to be determined. The calibration for maximum dturbancew* is chosen as:
w* 5B1TXx (12)
based on Eq.~9!. Defining the state error vectorx[x2 x, Eq. ~1!is subtracted from Eq.~11! to yield:
x85~A1B1B1TX2ZC2
TC2!x1~B12ZC2TD21!w2B1B1
TXx.(13)
Following Eq.~3!, a Hamiltonian functionH for the output feed-back is defined as:
H~x,x,u,w,p!5dV~x,x!
dt1izi22iwi2 (14)
By separating the storage functionV(x,p) into two parts as:
V~x,x,p!5xTX~p!x1 xTZ21~p!x; X5XT.0; Z5ZT.0 ;p,(15)
and using Eqs. ~1! and ~13!, the Hamiltonian functionH(x,x,u,w,p) becomes:
H~x,x,u,w!5xTp]X
]px1 xT
]Z21
]px12xTX~Ax1B1w1B2u!
1xTC1TC1x1uTu2wTw12xTZ21@~A1B1B1
TX
2ZC2TC2!x1~B12ZC2
TD21!w2B1B1TXx# (16)
Equations~4! and~5! are now extended for output feedback cotrol as:
]H~x,x,u,w,p!
]u~u5u* !50;
]2H~x,x,u,w,p!
]2u~u5u* !.0,
(17)
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

-
z
r-
d
r-e
be-l
in-e
bes
ri-
am-er
PV
eter
to
tial
Down
]H~x,x,u,w,p!
]w~w5w* !50;
]2H~x,x,u,w,p!
]2w~w5w* !,0,
(18)
and then Eqs.~16!–~18! yield to
w* 5B1TXx1~B12ZC2
TD21!TZ21x, (19)
However, unavailability of the full information on the current stax prevents the minimum control from being chosen as:u*52B2
TXx. Instead, we chooseu* 52B2TXx as the best approxi
mation, using the available information of the estimated statex.That is
u* 52B2TX~x2 x! (20)
Substituting Eqs.~19! and~20! into Eq.~16! and several algebraicmanipulations yield:
H~x,x,u* ,w* ,p!5xTQXx1 xTQzx (21)
QX[ p]X
]p1ATX1XA1C1
TC12XB2B2TX1XB1B1
TX (22)
QZ5 p]Z21
]p1Z21~A1B1B1
TX!1~A1B1B1TX!TZ21
2C2TC21XB2B2
TX1Z21B1B1TZ21 (23)
Based on Eq.~21!, we have:
QX,0; QZ,0; X5XT.0; and Z5ZT.0 (24)
that guaranteeH(x,u* ,w,p)<0 ;w, which is equivalent to:
E0
T
izi2dt,E0
T
iwi2dt ;T.0;w,
and is identical to the performance specification in Eq.~2!.
Construction of Feasible Control and Estimation LawsThe addition of Eqs.~22! and ~23! yields:
QX1QZ5 p]X
]p1 p
]Z21
]p1~Z211X!A1AT~Z211X!
1~Z211X!B1B1T~Z211X!2C2
TC21C1C1T .
(25)
Let a p-dependent matrixY be introduced and defined as:
Z215Y212X, (26)
DenotingQY[QX1QZ , we have
QY[ p]Y21
]p1Y21A1ATY211Y21B1B1
TY212C2TC21C1
TC1 ,
(27)
Thus, Eq.~24! becomes equivalent to:
QX,0, QY2QX,0, and X2Y21,0; ;p ; p. (28)
The formulation of Eq.~28! can be expressed as parameterition in terms of a free pair of function-valued matrices,Q(p,p).0 andS(p,p).0, as follows:
p]X
]p1ATX1XA1C1
TC12XB2B2TX1XB1B1
TX1Q~p,p!50,
(29)
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
te
a-
p]Y21
]p1Y21A1ATY211Y21B1B1
TY212C2TC21C1
TC1
1S~p,p!50 MAp ; p, (30)
X~p!2Y21~p!,0, (31)
Q~p,p!2S~p,p!,0. (32)
Any pair of positive-definite matrices,Q.0, S.0, which couldbe dependent on bothp and p, determines a feasible observeembedded LPVL2-gain controller in terms ofX.0, Y.0. Thefeatures of the proposed LPVL2-gain control law are summarizebelow:
• Feature 1: The internal structure of the feasible observeembedded LPVL2-gain controller can be realized in thsense that increasingQ emphasizes control and increasingSemphasizes estimation.
• Feature 2: The allowable parameter variation rate shouldbounded if Eqs.~29!–~32! yield feasible solutions. Specifically, Eqs. ~29! and ~30! represent two partial differentiaequations in terms of two independent variablesp andp with-out specified boundary conditions. The pair of algebraicequalities in Eqs.~31! and ~32! serve as constraints in thsearching domain~X, Y, R, S!. The solution of Eqs.~29!–~32!is strongly dependent on boundary conditions that canchosen as the freely regulated positive-definite matriceRandS.
• Feature 3: The control and estimation laws are parametcally dependent on the scheduling parameterp but not onp.So, there is no need for on-line measurements of the pareter variation ratep. Furthermore, the allowable parametvariation rate is bounded, or leads top(]X/]p)1Q(p,p)50 that may no longer represent a parameter in an Lsystem.
Let the parameter variation ratep be bounded within a rectangle
b< p<b& , (33)
where$b,b& % represents vertex of the rectangle, and the paramp is bounded by 0<p<p without losing the generality. In suchcase, the following differential inequalities can be formulatedhelp solve a feasible solution of Eqs.~29!–~32!:
F 2b]X21
]p1AX211X21AT2B2B2
T X21C1T B1
C1X21 2I 0
B1T 0 2I
G,0;
bP$b,b& %, (34)
F 1b]Y21
]p1Y21A1ATY212C2
TC2 Y21B1 C1T
B1TY21 2I 0
C1 0 2I
G,0;
bP$b,b& %, (35)
FY21 I
I X21G.0; X21.0; Y21.0, (36)
S&2Q& .0; S2Q.0, (37)
where the nonconvex formulation consists of a set of differenlinear matrix inequalities~LMIs! in Eqs.~34!–~36! and a feasibil-ity index in Eq.~37! with
SEPTEMBER 2003, Vol. 125 Õ 487
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

t
o
ml
s
2f
i
sx
o
i
Down
Q& 52S b&]X
]p1ATX1XA1C1
TC12XB2B2TX1XB1B1
TXD ,
(38)
S&52S b&]Y21
]p1Y21A1ATY211Y21B1B1
TY21
2C2TC21C1
TC1D , (39)
and similarly forQ and S. The inequalities in Eq.~37! make theembedding of a feasible observer conservative relative to an Lbased synthesis like~Wu, 2000@10#!. A feasible solution of Eqs.~34!–~37! is to be searched from the three convex differenLMIs in Eqs. ~33!–~36! until Eq. ~37! is satisfied.
An LPV feasible solution (X21,Y21) for Eqs.~34!–~37! is con-sidered to be a perturbation of the inverse of gain-scheduledlution (X0
21,Y021) via Fourier-sin series expansion as:
X21~p!5X021~p!1(
k51
n
Xk sin~kp!; Y21~p!
5Y021~p!1(
k51
n
Yk sin~kp!, (40)
where the solution (X0 ,Y0) of Eq. ~40! is the stable solutionof the following two gain-scheduled Riccati equations f0<p<p:
ATX01X0A1C1TC12X0B2B2
TX01X0B1B1TX050, (41)
AY01Y0AT1B1B1T2Y0C2
TC2Y01Y0C1TC1Y050, (42)
which can be solved based on the Riccati operator on proHamiltonian matrices~Doyle et al., 1988@12#! for ;pP@0,p#.Using the Fourier expansion in Eq.~40!, it follows that the LPVsolution~X, Y! and the gain-scheduled solution (X0 ,Y0) have thesame boundary conditions at both ends of the parameter dop50 andp5p. The numerical procedure to find a feasible sotion of Eqs.~34!–~37! is presented as follows:
@Step 1#: Start atn50. If the pair (X21,Y21)5(X021,Y0
21) sat-isfies Eqs.~34!–~37!, then stop and the gain-scheduled solutionthe choice among the feasible LPV solutions; else go to Step
@Step 2#: Increasen by 1, @i.e., n←(n11)]. Use a numericaltool ~for example,MATLAB LMI Toolbox! to obtain a feasiblesolution of Eqs.~34!–~36! in terms of the decision matriceX0
21(p), X1 , X2¯Xn , Y021(p), Y1 , Y2¯Yn .
@Step 3#: If the feasibility index of matrix pairs (S&2Q& ,S2Q) ispositive definite as in Eq.~37!, then stop; else go back to Step
@Step 4#: Having positivity of the feasibility index in Step 3, ia feasible solution is found to satisfy Eqs.~34!–~36!, then stopand this solution is the choice among the feasible LPV solutioelse go back to Step 1 to obtain a feasible solution for the revrobust performance~i.e., nominal performance plus stability robustness! criteria of the generalized plant in Eq.~1!.
Simulation ExperimentsThis section presents the results of simulation experiment
elucidate LPVL2-gain control design. The set of simulation eperiments is based on an exact model~i.e., with no modelinguncertainties! of a two-degree-of-freedom mass-spring-damperbration system with varying damping and stiffness under exenous inputs of plant disturbances and sensor noise. The mvalues of the first mass, second mass, first damping coefficsecond damping coefficient, first spring constant, and secspring constant are set at:m151; m251; z150; z250; k151;andk253, respectively. The control law processes the~measured!
488 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
MI-
ial
so-
r
per
ainu-
is2.
.
ns;sed-
to-
vi-g-ean
ent,ond
Fig. 1 First mass displacement with one-dimensional „1-D…
scheduling
Fig. 2 Second mass displacement with 1-D scheduling
Fig. 3 First mass displacement with 2-D scheduling
Fig. 4 Second mass displacement with 2-D scheduling
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

nt
e
n
h
a
s
h
tta
e
v
ne
a
P
o
n
-
ti-
ent
Foron
J.
olon-
to
ace
n
ec-sta-s.imu-ed.
aftcan
etion
res
in
rderini-an
tions
nal
Down
displacement signal of the second mass to determine the coforce applied on the first mass. The temporal evolution ofdisturbance is generated by zero-mean band-limited Gausnoise. These signals are used as the~force! input to the first massand as sensor noise in the displacement measurement of theond mass. The two exogenous signals of noise are indepenand identically distributed.
Four curves in each of Figs. 1–4 present transient responsmass displacements and their estimates under LPV-L2-gain con-trol and gain-scheduledH` control. While the gain-scheduledH`control is obtained byH` /m-synthesis at each operating poiwithout considering the variation rate of the scheduling paraeters, the LPVL2-gain control takes into account the impact of tparameter variation rate within an allowable bound. Each of thtwo control laws is tested for full state as well as output feedbwhere the state vectorx is replaced by its estimatex. For eachcontroller, the solid line represents a mass displacement~i.e., statex1 or x2) derived from the plant model; and the dotted linrepresents the estimated value~i.e., statex1 and x2) of the cor-responding mass displacement derived from the observer.initial conditions of the plant states and the observer statesintentionally set at different values [email protected] 0.1 0.0 0.0#T [email protected] 0.0 0.0 0.0#T, respectively, to examine the ability of eaccontroller to maintain the steady-state state estimation errorsmall values in the presence of exogenous disturbances.
In Figs. 1 and 2, the scheduling parameter is the damping rz1 that varies in a single-frequency motion within the [email protected], 0.3# with the maximum absolute variation rate of 0.0while the remaining five parameters are held constant at trespective mean values. In Figs. 3 and 4, in addition toz1 , weintroduce another scheduling parameterk2 that varies in a single-frequency motion within the range of@2,4# and with the maximumabsolute variation rate of 0.25. The remaining four parameare held constant at their respective mean values. From theporal trajectories of the mass displacements and their estimit appears that LPVL2-gain control exhibits superior systemperformance and estimation accuracy compared to gain-schedH` control. This feature of LPVL2-gain control becomesmore significant as the dimension of the scheduling paramincreases.
Summary and ConclusionsThis paper formulates a procedure for synthesis of obser
embedded linear parameter varying~LPV! L2-gain control lawsusing linear matrix inequalities~LMIs!. The LMIs are formulatedto solve a feasible observer-embedded LPVL2-gain control lawthat does not require on-line measurements of the schedulingrameter variation rate. Results of simulation experiments otwo-degree-of-freedom mass-spring-damper system are presto evaluate the LPVL2-gain control relative to gain-scheduledH`control.
AcknowledgmentsThe work reported in this paper has been supported in part
The Office of Naval Research under Grant No. N00014-960405; The Army Research Office~ARO! under Grant No.DAAD19-01-1-0646; and The National Science Council of Twan under Grant No. NSC 90-2213-E-194-032.
References@1# Tan, W., Packard, A. K., and Balas, G., 2000, ‘‘Quasi-LPV Modeling and L
Control of a Generic Missile,’’Proceeding of the American Control Conference, Chicago, Illinois, pp. 3692–3696.
@2# Giannelli, M., and Primbs, J., 2000, ‘‘An Analysis Technique for OptimizatiBased Control Applied to Quasi-LPV Plants,’’Proceeding of the AmericanControl Conference, Chicago, Illinois, pp. 1909–1913.
@3# Packard, A., 1994, ‘‘Gain Scheduling via Linear Fractional TransformatioSyst. Control Lett.,22, pp. 79–92.
@4# Hong, B. S., Yang, V., and Ray, A., 2000, ‘‘Robust Feedback Control
Journal of Dynamic Systems, Measurement, and ControlCopyright © 2
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
trolhesian
sec-dent
s of
tm-e
eseck
e
Theare
hto
atioof5eir
ersem-tes,
uled
ter
er-
pa-a
nted
by:-1-
i-
V-
n
,’’
of
Combustion Instability with Modeling Uncertainty,’’ Combust. Flame,120, pp.91–106.
@5# Tan, K., and Grigoriadis, K. M., 2000, ‘‘L2-L2 and L2-LOutput-FeedbackControl of LPV Sampled-Data Systems,’’Proceedings of the 39th IEEE Conference on Decision and Control, Sydney, Australia, pp. 4422–4427.
@6# Apkarian, P., Pellanda, P. C., and Tuan, H. D., 2000, ‘‘Mixed H2/Hinf MulChannel Linear Parameter-Varying Control in Discrete Time,’’Proceeding ofthe American Control Conference, Chicago, Illinois, pp. 1322–1326.
@7# Gahinet, P., Apkarian, P., and Chilali, M., 1994, ‘‘Affine Parameter-DependLyapunov Functions for Real Parametric Uncertainty,’’Proceedings of the33rd Conference on Decision and Control, Lake Buena Vista, FL, pp. 2026–2031.
@8# Bara, G. I., Daafouz, J., Ragot, J., and Kratz, F., 2000, ‘‘State EstimationAffine LPV Systems,’’Proceedings of the 39th IEEE Conference on Decisiand Control, Sydney, Australia, pp. 4565–4570.
@9# Wu, F., Yang, X. H., Packard, A., and Becker, G., 1996, ‘‘InducedL2-normControl for LPV Systems with Bounded Parameter Variation Rates,’’ Int.Robust Nonlinear Control,6, pp. 983–998.
@10# Wu, F., 2000, ‘‘A Unified Framework for LPV System Analysis and ContrSynthesis,’’Proceedings of the 39th IEEE Conference on Decision and Ctrol, Sydney, Australia, pp. 4578–4583.
@11# Gahinet, P., and Apkarian, P., 1994, ‘‘A Linear Matrix Inequality ApproachH` Control,’’ Int. J. Robust Nonlinear Control,4, pp. 421–448.
@12# Doyle, J. C., Glover, K., Khargonekar, P., Francis, B. A., 1988, ‘‘State-SpSolutions To StandardH2 and H` Control Problems,’’ IEEE Trans. Autom.Control,34, pp. 831–847.
@13# Fung, Y., Yang, V., and Sinha, A., 1991, ‘‘Active Control of CombustioInstabilities with Distributed Actuators,’’ Combust. Sci. Technol.,78, pp.217–245.
Receding Horizon Stabilizationof a Rigid Spacecraft WithTwo Actuators
Nicolas Marchande-mail: [email protected]
Mazen Alamir
Laboratoire d’Automatique de Grenoble~LAG!,INPG-UJF-CNRS UMR 5528, ENSIEG BP 46,38402 Saint Martin d’He`res Cedex, France
In this paper, a receding-horizon control, using systematic projtion on a Chebyshev’s polynomial basis, is proposed for thebilization of a rigid spacecraft operating with only two actuatorThe proposed scheme privileges the speed of the algorithm. Slations on SPOT4 spacecraft with a robustness test are provid@DOI: 10.1115/1.1591806#
1 IntroductionIf the stabilization of the angular velocities of a rigid spacecr
operating with two torques instead of three usually availablebe achieved with a smooth static state feedback~Aeyels andSzafranski, 1988@1#!, it is no longer true for the attitude since thnecessary condition for static continuous feedback stabilizathen fails to be satisfied~Byrnes and Isidori, 1991@2#!. The sta-bilization of the rigid spacecraft in failure mode hence requidiscontinuous~see, e.g., Crouch, 1984@3#; Krishnan et al., 1992@4#! or time varying~see Morin and Samson, 1997@5#, and thereferences therein! tools; this last approach often resultingcostly in term of energy or wear rapid oscillations.
The proposed approach is based on receding horizon. In oto avoid the usual heavy computer cost of this strategy, the mmization is avoided; on the other hand, sole the attractivity cformally be established. The approach gives reasonable varia
Contributed by the Dynamic Systems, Measurement, and Control Division of THEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division March 17, 1999; firevision, October 17, 2002. Associate Editor: G. Fahrenthold.
SEPTEMBER 2003, Vol. 125 Õ 489003 by ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

ve
e
sn
d
r
,
-
.-n.
e
-i-
m
st-rendle
-
Down
of the system states, can be real time implemented on relatifast systems and applied to a wide class of nonlinear syst~Alamir and Marchand, 1999@6#!. Other authors have proposestabilizing predictive laws for various flying systems~Singh et al.,1995 @7#; Wen et al., 1997@8#! but, contrary to the present casthe system is either linearizable or linearly stabilizable.
If F f is an inertially fixed frame andFs a frame of the sameorientation attached to the principal inertia axes of the spacecand with origin at its center-of-mass, a series of three rotationanglesc, w, andu about resp the third, the first and the secoaxis ofF f , performed in the right order, is sufficient to orient thspacecraft. Coupled with the dynamic equation, it gives, assumthat the third control is defective:
v15J22J3
J1v2v31v1
v25J32J1
J2v1v31v2
v35J12J2
J3v1v2 (1)
w5v1 cosu1v3 sinu
u5tanw~v1 sinu2v3 cosu!1v2
c52~cosw!21~v1 sinu2v3 cosu!
where J5diag(J1,J2,J3) is the inertia matrix. Letu1ª@(J22J3)/J1#v2v31v1 andu2ª@(J32J1)/J2#v1v31v2 be directlytaken as controls and letaª(J12J2)/J3 . Note then the singular-ity for w56p/2 forcing wP] 2p/2,p/2@ .
The next section gives the theoretical background of the unlying scheme. Its numerical implementation is then presented
2 Theoretical BackgroundThe approach of the paper is based on the following theo
that ensures asymptotic stability in an optimization free recedhorizon scheme:Theorem 2.1.Let x5 f (x,u) with f continuous. Assume that;xPRn, 't°u(t,x) and its corresponding open-loop trajectort°xu(t,x) s.t. (i) limt→` xu(t,x)50 and (ii) ;t1 ,t2PR1, t1
<t2 and ;xPRn, xu@ t2 ,xu(t1 ,x)#5xu(t11t2 ,x) then the originis globally attractive for the closed-loop system x˙ 5 f @x,u(0,x)#.Furthermore, if (iii) xu(t,x) is continuous w.r.t. x uniformly in tthen the closed-loop system is globally asymptotically stable.
490 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
elyms
d
,
raftofd
eing
er-.
eming
y
Item ~ii ! implies that the open loop trajectory issued fromx0with open-loop controlu(t,x0) is identical to the closed loop trajectory issued from the same point but with feedbacku(0,x). Withitem ~i!, this clearly implies that the origin is uniformly attractiveMoreover, with item~iii !, it follows that the closed-loop trajectories are uniformly continuous with respect to the initial conditioAs proved by Hahn~1967, theorem 38.1@9#!, uniform continuitycombined with attractivity implies asymptotic stability of thclosed-loop.
3 Practical ImplementationProjecting systematically on a function space of basisTN(t)
formed by theNth first Chebyshev’s polynomials, the time evolution of any variable and of its derivatives is given by its coordnates. With this parameterization, given a sampling periodT and aprediction horizon@kT,kT1t f #, system~1! can be transformed onthe prediction horizon an algebraic syste$Fi(t,au
k ,awk ,av3
k ,av1
k ,av2
k ,au1
k ,au2
k )'0% i 51, . . . ,6 triangular in
auk ,aw
k , . . . ,au2
k denoting the coordinates at sampling timekT ofu,w, . . . ,u2 in the function space. TheFi ’s are given by
F15g1v31g2v321g3v31g4'0 ~→v3!
F25w2v1 cos~u!2v3 sin~u!'0 ~→v1!
F35v22 u1tanw~v1 sinu2v3 cosu!'0 ~→v2!(2)
F45c cosw1v1 sinu2v3 cosu'0 ~→c!
F55v12u1'0 ~→u1!
F65v22u2'0 ~→u2!
with g15cos2(u), g25a sin(u)tan(w), g35a@2w tan(w)1u cos(u)sin(u)2w tan(w)sin2 (u)#, g45a@2wu cos(u)1w2 tan(w)sin(u)# and u5TN(t)au
k , w5TN(t)awk , . . . , u2
5TN(t)au2
k . Triangular system~2! reduces the search of solutionto soleu and w. This can be linked with the flat output for flasystems~Fliess et al., 1995@10#! where only an algebraic dependence is allowed. It is worth noting that this particular structurenders constraints on the control or on the states hard to hawithout modifications.
Given the parameterization ofu and w, the best parameterization of the other variables is obtained by:
Fig. 1 Closed loop behavior of the rigid spacecraft with J 1Ä2500 kg m 2, J 2Ä6500 kg m 2,J 3Ä8500 kg m 2
„SPOT4, Sira-Ramirez and Siguerdidjane, 1996 †12‡…, prediction horizont fÄ10 s with NfÄ20 points, a sampling period TÄ0.5 s, a Chebyshev’s polynomial basis ofdimension N¿1Ä6 and initial condition „v1
0,v20,v3
0,u0,w0,c0…Ä„0,0,0,2pÕ3,pÕ3,0…. The per-
turbed case is with 10% error on a simulating a momentum error and 5° of permanent offseton u simulating a captor error.
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

T
-
e
o
t
nu
t
id
E
de
f a
arean
ic-gn,’’
tive
fectrol,
lid-t. J.
els
tatethe
n:edna-bestch-nena-ontedn-ionnti-
ite-
01;
Down
axi
k ~auk ,aw
k !'ArgH minaxi
k subject to
TN~0!axi
k5xi ~kT!
(j 51
Nf
iFi~ t j ,auk , . . . ,axi
k !i2Jwherexi successively denotesv3 , v1 , v2 , c, u1 , andu2 , andNf is such that 05t1,¯,tNf
5t f . This step takes less than 1ms where an ODE solver requires at least ten times more.optimization consist inone nonlinear least square in av3
k that canbe solved by means of Newton’s method that shows fastermore stable local convergence than the often used GauNewton’s method~Dennis and Schnabel, 1983@11#!, andfive lin-ear least squares in av1
k , av2
k , ack , au1
k , and au2
k .Finally, let functionR be defined by:
R~auk21,aw
k21!ªS ArgH minau
(j 51
Nf
iTN~ t j !au2D0T~ t j !i2J
ArgH minaw
(j 51
Nf
iTN~ t j !aw2DwT~ t j !i2J D
with for x5u or w, DxT(t)ªTN(t1T)ax
k21 for tP@0,t f2T# andDx
T(t)ª0 for tP@ t f2T,t f #. All is now stated for the algorithm.Algorithm: At each sampling timekT:
• Using R(auk21,aw
k21) as initialization, computeauk and aw
k
solution of:
$TN~ t f !axi
k %xi5u,w, . . . ,u250 (3)
subject to the linear constraintsTN(0)auk5u(kT) and TN(0)aw
k
5w(kT). This is a nonlinear least squares of 2(N21)24 un-knowns @2(N21) for au and aw minus 4 linear constraints imposed by the initial and final positions ofu and f#. Up to theapproximations, R(au
k21,awk21) satisfies~3!.
• Apply until the next sampling time the corresponding cotrols u1(t)5TN(t)au1
k (auk ,aw
k ) andu2(t)5TN(t)au2
k (auk ,aw
k ).
Stability of the numeric scheme: If no perturbation occurs,Rinsures thatwk(t)'TN(t)aw
k 'TN(t1T)awk21'wk21(t1T) and
uk(t)'TN(t)auk'TN(t1T)au
k21'uk21(t1T) which is,up to theapproximations, the sampled version of item~ii ! of Theorem 2.1.Item ~i! being clearly verified thanks to~3!, the proposed schemrenders the origin attractive.
Simulations „see Fig. 1…: Because of the approximations~projec-tions, etc.!, the nonperturbed system reaches the origin after 1instead of the 10 s expected. The stability of the perturbed syslet us catch sight of good robustness properties that remain taddressed more precisely. The length of the horizon does nofluence noticeably the behavior of the algorithm. The size ofChebyshev polynomial basis tunes the error of the method:creasing it reduces the errors but increases the computer cosmay render the problem badly conditioned. However, it remapossible to modify it ‘‘dynamically.’’
4 ConclusionIn this paper a new stabilizing algorithm based on reced
horizon using intensively projections on a Chebyshev’s polymial basis is proposed for the rigid spacecraft operating in failmode. Contrary to the classical optimal receding horizon thatquires a computer heavy cost, the method can be real time immented on reasonably fast systems.
References@1# Aeyels, D., and Szafranski, M., 1988, ‘‘Comments on the stabilizability of
angular velocity of a rigid body,’’ Syst. Control Lett.,10~1!, 35.
Journal of Dynamic Systems, Measurement, and ControlCopyright © 2
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
0his
andss–
n-
5 stem
bet in-heIn-
t andins
ingo-rere-ple-
he
@2# Byrnes, C. I., and Isidori, A., 1991, ‘‘On the attitude stabilization of rigspacecraft,’’ Automatica,27~1!, 87.
@3# Crouch, P. E., 1984, ‘‘Spacecraft attitude control and stabilization,’’ IEETrans. Autom. Control,AC-29~4!, 321.
@4# Krishnan H., McClamroch H., and Reyhanoglu M., 1992, ‘‘On the attitustabilization of a rigid spacecraft using two control torques,’’ inProc. Ameri-can Control Conference, pp. 1990–1995.
@5# Morin, P., and Samson, C., 1997, ‘‘Time-varying exponential stabilization origid spacecraft with two control torques,’’ IEEE Trans. Autom. Control,42~4!,528.
@6# Alamir, M., and Marchand, N., 1999, ‘‘Numerical stabilization of nonlinesystems—exact theory and approximate numerical implementation,’’ EuropJ. Control,5~1!, 87.
@7# Singh, S. N., Steinberg, M., and DiGirolamo, R. D., 1995, ‘‘Nonlinear predtive control of feedback linearizable systems and flight control system desiJ. Guid. Control Dyn.,18~5!, 1023.
@8# Wen, J. T., Seereeram, S., and Bayard, D. S., 1997, ‘‘Nonlinear prediccontrol applied to spacecraft attitude control,’’ inProc. American Control Con-ference, Vol. 3, pp. 1899–1903.
@9# Hahn, W., 1967,Stability of motion, Springer Verlag, Berlin-Heidelberg.@10# Fliess, M., Levine, J., Martin, Ph., and Rouchon, P., 1995, ‘‘Flatness and de
of nonlinear systems: introductory theory and examples,’’ Int. J. Cont61~6!, 1327.
@11# Dennis, J. E., and Schnabel R. B., 1983,Numerical method for unconstrainedoptimization and nonlinear equations, Chap. 10, Prentice Hall.
@12# Sira-Ramirez, H., and Siguerdidjane, B., 1996, ‘‘A redundant dynamical sing mode control scheme for an asymptotic space vehicle stabilization,’’ InControl,65, 901.
Adaptive Parameter Identification ofan Accurate Nonlinear DynamicalModel for Marine Thrusters
Ralf BachmayerDepartment of Mechanical and Aerospace Engineering,Princeton University, Princeton, NJ 08544e-mail: [email protected]
Louis L. WhitcombDepartment of Mechanical Engineering, The JohnsHopkins University, Baltimore, MD 21218e-mail: [email protected]
Recently reported finite-dimensional nonlinear thruster modemploying empirically determined lift–drag curves have beenshown to accurately model both the transient and steady sresponse of marine thrusters. These reports have employedstandard off-line paradigm for model parameter identificatioFirst, real-time sensor data (force, torque, fluid velocity) is loggin laboratory experiments. Second, the experimental data is alyzed with a least-square regression technique to complete afit for the model parameters. This paper reports an on-line tenique for adaptive identification of model parameters for marithrusters. The stability of the proposed technique is shown alytically. The performance of the on-line adaptive identificatitechnique, evaluated with respect to an experimentally validaplant model, is shown to compare favorably to its off-line couterpart, but does not require the thrust and torque instrumentatrequired by conventional off-line least-squares parameter idefication techniques.@DOI: 10.1115/1.1591807#
1 IntroductionRecent results indicate that the transient~unsteady! dynamics of
marine thrusters can be approximated by a simple nonlinear fin
Contributed by the Dynamic Systems, Measurement, and Control Division of THEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division February 15, 20final revision, October 31, 2002. Associate Editor: S. D. Fassois.
SEPTEMBER 2003, Vol. 125 Õ 491003 by ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

tth
fl
a
o
,
lnfes
tl
e
m
d
ap-
spre-
s
t
s
r-
on-
Down
dimensional lumped-parameter dynamical system@1–5#. In @5#the Authors present a nonlinear model that is based on the melectro-mechanical dynamics and thin-foil propeller hydrodynaics using non-sinusoidal lift and drag coefficients. Identificationthe plant model parameters was performed off-line with extensuse of a new thruster testing facility@6#. The focus of this paper isto report the development and experimental validation of a staadaptive identifier for these plant parameters. The proposed sadaptive identifier not only allows for on-line model parameestimation; it also requires significantly less instrumentation tis required by least-square off-line methods—specificallythrust and torque instrumentation.
This paper is organized as follows: In Section II we briedescribe the thruster model derived from@1–3# and reported in@5#. Section III describes the design of a stable asymptotic adtive identifier. An alternative representation of the lift and drcoefficients allows for the design of a stable adaptive identifierthruster lift and drag curves. The identifier is evaluated with actexperimental data, and its performance is compared to thaconventional off-line parameter identification.
A more complete discussion of this identifier can be fouin @7#.
2 Nonlinear Thruster Dynamics ModelingThis section briefly reviews the axial flow thruster model f
DC-brushless thrusters originally reported in@5#. This system with2 degrees of freedom, the axial flow velocity,vz , and the propel-ler rotational velocity,V, can be expressed in state space form
MxI 52F~xI !1bI u1G~xI ! (1)
with
G~xI !521
2%A0uVW u2S 1 0
0 0.7RDR~2b!F f D~a!
f L~a! G (2)
and with
R~b!5S cosb 2sinb
sinb cosbD . (3)
A detailed description of this plant model is reported in@5#.
2.1 Lift and Drag Curves. The hydrodynamic forcesthrust and torque, represented by the matrixG(xI ) in ~6! are as-sumed to be proportional to dimensionless lift and drag coecients f D(a) and f L(a) with a being the angle of attack.
In @2,3# the authors report the use simple sinusoidaland drag curves to approximately model the lift and drag futions. This approach significantly improved model behaviorslowly varying control input compared to the previously ussteady-state models@1#. For rapid changes, for example thoperformed during closed-loop hovering operations, the pposed models showed significant discrepancies during thesients. In @5# we address this problem by measuring theand drag coefficients foraP@0,2p# and devising an offline ‘‘hy-brid’’ technique for generating lift–drag curves based on expmental data yet not requiring transient fluid velocity flowmeasurements. The resulting off-line lift–drag curve estimawere implemented in the simulations as look-up tables, us1200 data points per curve.
3 Adaptive IdentifierIn @5# we reported a method for off-line thruster model para
eter identification from experimental data. In this chapter weport an on-line adaptive estimator for identifying thruster moparameters in real-time.
492 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
otorm-ofive
bleableeranno
y
ap-g
forualt of
nd
r
as
ffi-
iftc-ordero-ran-ift
ri--tesing
-re-el
3.1 Lift and Drag Function Parameter Estimator. In thissection we address the problem of deriving a stable on-line adtive identifier for f L(a) and f D(a). The identifier is developed forthe axial flow system described by~1! assuming full state accesand bounded-input, bounded-state stability. We choose to resent the curves,f L(a) and f D(a), as a 2(n11)-coefficient Fou-rier series representations of the form:
f Ln~a!5bL01(
j 51
n
aL j sin~ j •a!1bL j cos~ j •a!
(4)
f Dn~a!5bD01(
j 51
n
aD j sin~ j •a!1bD j cos~ j •a!
Using this we can rewrite~6!, assuming all the other coefficientare known, as
MxI 52F~xI !1bI u1G~xI !kI ab (5)
with the parameter vectorkI ab containing the constant buunknown 2(n11) Fourier coefficients andG(xI ) a 232(n11)matrix containing the varying but known sin and cos termof ~4!.
We propose an adaptive parameter estimator of the form
MxI 52F~xI !1bI u1G~xI !kI ab2CDxI (6)
wherekI ab is the estimate of the unknown parameter vectorkI aband C is a positive-definite, symmetric gain matrix. The errosystem with the following error coordinates
DxI 5xI 2xI
DkI ab5kI ab2kI ab
can be written as
MDxI 5G~xI !DkI ab2CDxI . (7)
In order to find a stable parameter update law forkI ab we ex-amine the error system stability using a Lyapunov approach. Csider the following Lyapunov candidate:
V~DxI ,DkI !512 DxI TMDxI 1
12 DkI ab
T NabDkI ab (8)
with the constant, positive-definite, symmetric mass matrix,M ,and a positive definite, symmetric gain matrix,Nab . This functionfulfills the requirements of a Lyapunov candidate.
The time derivative of the Lyapunov Function is
V~DxI ,DkI ab!5DxI TMDxI 1DkI abT NabDkI ab (9)
By substituting~7! into ~9! we obtain
V~DxI ,DkI ab!5DxI TG~xI !DkI ab2DxI TCDxI 1DkI abT NabDkI ab .
(10)
Observe thatDkI ab5kI ab sincekI ab is constant.For the choice of
D kIab52NabT21G~xI !TDxI , (11)
whose entries are all known,~10! simplifies to
V~DxI ,DkI ab!52DxI TCDxI (12)
where
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

u
ao
a
Theatn-
elyousrtedple-
d onuldpre-ids.atu-
ag
del
u-tro-nt,adyvest thed
ut-
Down
V~DxI ,DkI ab!,0 ; DxI Þ0. (13)
The general form of this parameter update law is commonly eployed for adaptive identification and control of systems with fstate access and linear in its unknown parameters@8,9#.
We conclude the following:~1! From ~8!, ~13! and the properties of the Lyapunov function wconcludeDxI andDkI ab are bounded.~2! Assuming xI to be bounded and given thatDxI , DkI ab arebounded, by direct inspection of~7! and~11! we conclude thatDxIandDkI ab are bounded.~3! SinceV(DxI ,DkI ab) is bounded from above andV(DxI ,DkI ab) isbounded from below we can write
Et0
`
DxI TCDxI dt52Et0
`
V~t!dt5V~ t0!2V~`!,`
henceDxI PL2, with
L25H f ~ t !:I f ~ t !I 25S Et0
`U f ~ t !U2dtD 1/2
,`J (14)
~4! Given thatDxI PL2 andDxI is bounded we can conclude fromBarbalat’s lemma@10# that lim
t→`DxI 50.
Since limt→`
DxI 50 by direct inspection of~11! we conclude that
limt→`
DkI ab50 and therefore the boundedness ofkI ab . We cannot,
however, conclude convergence of the parameter errorDkI ab . Pa-rameters convergence requires additional conditions of persisexcitation. In the identification of algebraic systems, it is sufficieto require that the input signal be PE in order to conclude pareter convergence. In contrast, in dynamical systems of the f~11!, necessary and sufficient conditions on the inputu(t) to guar-antee PE conditions on the resulting internal signalsG(xI ) andDxIare not known. The reader is referred to@8,9# for detailed discus-sion of this issue.
Two points are worthy of note:~1! We note that in@11# the authors construct representationsinfinite-dimensional dynamical systems with independent v
Fig. 1 Lift and drag curve approximated by a 82 parameterFourier series „dashed … and the tabulated lift and drag curves„solid … versus angle of attack a.
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
m-ll
e
tentntm-rm
ofri-
ables possessing both time derivatives and spatial derivatives.problem reported in@11# requires spatially continuous sensing thmay be difficult or impossible to implement in practice. In cotrast, the present paper addresses a finite dimensional~approxi-mate! plant model that has been shown empirically to accuratrepresent the input–output behavior of the underlying continusystem of a thruster in fluid. This problem and approach repoherein requires only discrete point sensors, and has been immented in practice.~2! The convergence proofs presented herein are not predicatea Fourier lift–drag representation. The convergence proofs woremain unchanged if an alternative linear-in-the-parameters resentation were employed—for example, polynomials or sigmoWe have adopted a Fourier representation simply because it nrally embodies the periodicity inherent in four-quadrant lift–drcurves.
The following system of equations summarizes the plant moand the stable adaptive identifier for lift and drag curves:
DxI 5M 21G~xI !DkI ab2M 21CDxI(15)
DkI ab5kI ab52~NabT !21G~xI !TDxI .
3.2 Case Study: Approximate Lift and Drag Curve Repre-sentation. In this section we implement the 82 parameter Forier estimator using the full tabulated plant representation induced in Section 2.1. The input signal into the idealized plau(t), is a step input that is inverted after the plant reaches a stestate. Figure 1 shows the estimate of the lift and drag curcompared to the tabulated curves. The simulations show thaidentified curves~dashed lines! approximate the actual tabulatelift and drag curves~solid lines! with good accuracy.
Figure 2 compares identified plant output and model plant oput to experimental data. As reported in@5# the model plant output~dash–dotted line! approximates the experimental data~solid line!
Fig. 2 The figure shows three resulting thrust profiles versustime for identical input signals. The solid line represents theexperimentally determined thrust, the dashed line is the thrustcomputed using the 82 coefficient identified plant and thedash–dotted line is the simulated thrust using the tabulated liftand drag curves.
SEPTEMBER 2003, Vol. 125 Õ 493
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

nn
efil
v
r
fr
s
ts
.f
9
ls
i
c
e
ro
,
e
d tosivera-
perntousom-aineth-de
re-nd
ulsethetheionthe
set. Ifthenaltiveal
ral.
detions
01;
Down
with good accuracy. The plots also show the output of the idefied plant ~dashed lines! matches the output of the model placlosely. Since the identifier was implemented using the tabulaplant, the identifier tried to match the model plant, not the expmental plant, which results in a closer match between identiplant output and model plant output than between identified poutput and experimental data.
4 Conclusions and Future WorkWe presented an adaptive identifier and analytically pro
its stability. The stable adaptive identifier allows for on-line prameter estimation without requiring force and torque instmentation as required previously in@5#. An alternative liftand drag curve representation using truncated Fourier seriesintroduced.
The estimator made use of an alternative representation olift and drag curves. We employed a truncated Fourier seriesresentation as an alternative to the tabulated lift and drag curvepresented in the first part of the paper. The closed form repretation of this approach has the advantage that the plant dynammodel is linear in the Fourier coefficients which gives rise todesign of a stable adaptive estimator for the Fourier coefficientthe series representation.
For the case where the plant is modeled using tabulatedand drag curves and the identifier uses a 82 coefficient Fourepresentation, the parameter estimate,kI , did approach thecorresponding Fourier coefficients of the Fourier transformthe tabulated lift–drag curves for a sufficiently rich input signalis expected that a lower order representation of the lidrag curves in the identifier will result in a degraded identifiperformance.
As a next step, the adaptive identification of the lift and drcurves deserves a closer look in order to improve the rateconvergence of the Fourier coefficients. It might be desirableinvestigate representations of the lift and drag curves differfrom Fourier series representation.
The authors gratefully acknowledge the support of the OfficeNaval Research and the National Science Foundation under GNos. BES-9625143 and CMS-0100783.
References@1# Yoerger, D. R., Cooke, J. G., and Slotine, J. E., 1990, ‘‘The influence
thruster dynamics on underwater vehicle behavior and their incorporationcontrol system design,’’ IEEE J. Ocean. Eng.,15~3!, 167.
@2# Healey, A. J., Rock, S. M., Cody, S., Miles, D., and Brown, J. P., 19‘‘Toward and improved understanding of thruster dynamics for underwavehicles,’’ IEEE J. Ocean. Eng.,20~4!, 354.
@3# Whitcomb, L. L., and Yoerger, D. R., 1999, ‘‘Development, comparison, apreliminary experimental validation of nonlinear dynamic thruster modeIEEE J. Ocean. Eng.,24~4!, 481.
@4# Whitcomb, L. L., and Yoerger, D. R., 1999, ‘‘Preliminary experimentsmodel-based thruster control for underwater vehicle positioning,’’ IEEEOcean. Eng.,24~4!, 495.
@5# Bachmayer, R., Whitcomb, L. L., and Grosenbaugh, M. A., 2000, ‘‘An acrate four-quadrant nonlinear dynamical model for marine thrusters: Theoryexperimental validation,’’ IEEE J. Ocean. Eng.,25~1!, 146.
@6# Bachmayer, R., Whitcomb, L., Nakamura, M., and Grosenbaugh, M., 19‘‘Unsteady three-axis force, torque and flow dynamical modeling and expments with marine thrusters,’’ inThe 10th International Symposium on Unmanned Untethered Submersible Technology.
@7# Bachmayer, R., and Whitcomb, L. L., 2001, ‘‘Adaptive parameter idetification of an accurate nonlinear dynamical model for marine thrusteTechnical Report 2001-11, Dynamical Systems and Control LaboratJohns Hopkins University, Baltimore, Maryland, USAHTTP://robotics.me.jhu.edu/˜www.
@8# Narendra, K., and Annaswamy, A., 1988,Stable Adaptive Systems, Prentice-Hall, NY.
@9# Sastry, S., and Bodson, M. 1989,Adaptive Control: Stability, Convergenceand Robustness, Prentice-Hall.
@10# Khalil, H. K., 1996, Nonlinear Systems, 2nd ed., Prentice-Hall, NewJersey.
@11# Orlov, Y., and Bentsman, J., 2000, ‘‘Adaptive distributed parameter systidentification with enforceable identifiability conditions and reduced-ordspatial differentation,’’ IEEE Trans. Autom. Control,45~2!, 203.
494 Õ Vol. 125, SEPTEMBER 2003 Copyright
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ti-ttedri-edant
eda-u-
was
theep-s asen-ical
heof
liftrier
ofItt–er
agofto
ent
ofrant
ofinto
5,ter
nd,’’
nJ.
u-and
97,ri-
-
n-s,’’ry,
.
mser
On Frequency-Domain and Time-Domain Input Shaping for Multi-ModeFlexible Structures
Lucy Y. Paoe-mail: [email protected]
Craig F. Cutforthe-mail: [email protected]
Electrical and Computer Engineering Department,University of Colorado, Boulder, CO 80309
The technique of input shaping has been successfully appliethe problem of maneuvering flexible structures without excesresidual vibration. Because a shaper is designed such that vibtion is eliminated at the end of the shaped input, a short shalength means that vibration is eliminated sooner. As differeshaper design methods yield different shapers, it is advantageto know how the shaper lengths of these different methods cpare. In this paper we draw comparisons between time-dominput shaping methods and frequency-domain input shaping mods after outlining conditions when non-negative amplitushapers exist when using frequency-domain methods.@DOI: 10.1115/1.1591808#
1 IntroductionInput shaping is a feedforward technique used to reduce
sidual vibration in flexible structures. The system frequency adamping are used to design an input shaper, which is an impsequence that is convolved with the input. This shaped input isnew input to the system. If the parameters used to designshaper are accurately known, all or most of the residual vibratwould disappear after the time of the last impulse. This time oflast impulse is referred to as the length of the shaper.
If the sum of the impulse amplitudes is one and all impulamplitudes are non-negative, favorable characteristics resulthe amplitudes sum to one, the final set point resulting fromshaped input will be the same as that resulting from the origiunshaped input. In addition, if all the amplitudes are non-negathe shaped input will not exceed actuator limits if the originunshaped input does not exceed actuator limits.
Singer and Seering@1# developed several time-domain~TD!input-shaping methods that only require knowledge of the natufrequencyv and dampingz of each flexible mode of a systemThe closed-form solution for a zero-vibration~ZV! shaper for aone-mode system is@1#
A051
11K, t050, A15
K
11K, t15
p
vd(1)
whereK5e2zp/A12z25e2zp/zd andA0 andA1 are the impulse am-plitudes that occur at timest0 andt1 , respectively.
In general, a multi-mode convolved Zero Vibration~ZV! TDshaper has 2m impulses and length( i1/(2f di) @2# wherem is thenumber of modes andf di is the damped frequency of theithflexible mode in Hz. It is also possible to generate multi-motime-domain shaper sequences using a set of constraint equa
Contributed by the Dynamic Systems, Measurement, and Control Division of THEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division February 15, 20final revision, September 9, 2002. Associate Editor: C. Rahn.
© 2003 by ASME Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

i
h
.
idt
-
xist
led
on-om-des
eo-e or
arbi-e, theh is
reecial
e a
sgthodegthatwill
o isaperointall
is
Down
that take into account all modes of the system and simultaneosolve for the impulse amplitudes and times; the shapers are oshorter in length, but sometimes the set of constraint equatcan be extremely difficult to solve@2# and thus are not included inthis comparison.
Jones and Ulsoy@3# as well as Tuttle and Seering@4# estab-lished a frequency-domain~FD! method of placing zeros to cancesystem vibration. Using this zero-placement frequency-dommethod, the general solution for a single-mode shaper is
b~A0d~ t !1A1d~ t2T!1A2d~ t22T!! (2)
whereA051, A1522 cos(vdT)e2zvT, A25e22zvT, b times A0 ,A1 , andA2 are the impulse amplitudes,v and z are the naturalfrequency and damping of the flexible mode of the system,vd
5vA12z2 is the damped natural frequency,T is the impulsespacing, andb is a positive scaling constant. As this shaper isfunction of T, the sequence is solved for a range ofT ’s and thesmallestT that yields all non-negative amplitudes is chosen asdesired impulse spacing since it leads to the shortest shaperall non-negative amplitudes.
A multi-mode FD shaper form modes can be expressed as tconvolution ofm single-mode shapers. In general, a multi-mozero-placement FD shaper has 2m11 impulses and length 2mT,wherem is the number of modes andT is the impulse spacingThe impulse spacing is dependent upon the different modalquencies and it is not apparent if aT always exists that results inall non-negative impulse amplitudes. In Section 2 and the Appdix, we show that non-negative FD shaper solutions exist for stems with three or fewer flexible modes.
Because the convolved TD and the zero-placement FD methare computationally comparable and efficient methods for desing input shapers, we will compare multi-mode input shapersigns using these methods in Section 3 to determine which meleads to faster shapers.
2 Existence of FD Shaper SolutionsJones and Ulsoy established the constraint cos(vdT)<0 that en-
sures a single-mode zero-placement shaper will have all nnegative amplitudes@3#. Extending this, a sufficient~but not nec-essary! constraint to ensure that a multi-mode FD shaper hasnon-negative amplitudes is to ensure that each single-mode shhas all non-negative amplitudes. Thus, if aT exists such thatcos(vdiT) is nonpositive fori 51,2, . . .m, then it can be guaranteed that there exists aT that will result in an all non-negativeshaper solution for the system withm modes.
Note: Without loss of generality, to simplify notation, cos(vdT)will be referred to as cos(2pft).
Theorem 1. Two-mode system: If A(t)5cos(2pfAt) and B(t)5cos(2pfBt) where fA< f B and ti,1/f i for i 5A and B, then thereexists a t* such that A(t* )<0 and B(t* )<0.
Proof. • Let f A< f B<3 f A
f A< f B<3 f A⇒tA>tB>1
3tA⇒ 3
4tB>
1
4tA>
1
4tB⇒AS tA
4 D50
and BS tA
4 D<0
[ there exists at* such thatA(t* )<0 and B(t* )<0 whenf A< f B<3 f A .
• Let f B.3 f A
Let DT be the interval@ 14tA , 3
4tA#. ThenA(t)<0;t,DT.
length~DT!534tA2
14tA5
12tA
f B.3 f A⇒tB,13tA⇒tB,
12tA5 length~DT!
[ there exists at* such thatA(t* )<0 and B(t* )<0 whenf B.3 f A .
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
uslyftenons
lain
a
thewith
ede
fre-
en-ys-
odsgn-e-hod
on-
allaper
A non-negative shaper solution cannot be guaranteed to efor arbitrary four-mode systems using similar sufficient~but notnecessary! constraints. PickvdA , vdB52vdA , vdC53vdA , andvdD54vdA . For any four such frequencies, there is noT at whichcos(vdiT)<0;i.
Theorem 2. Three-mode system: If A(t)5cos(2pfAt), B(t)5cos(2pfBt), and C(t)5cos(2pfCt) where fA< f B< f C andti,1/f i for i 5A, B, and C, then there exists a t* such thatA(t* )<0, B(t* )<0, and C(t* )<0. The details of the proof ofthis theorem are given in the Appendix.
Recall that a multi-mode FD shaper forn modes can be ex-pressed as the convolution ofn single-mode shapers. A speciacase of this is when alln of the single-mode shapers are designfor the same mode~i.e., vdi5vd; i 51,2, . . . ,n) which leads tonth-order robustness for this mode. As discussed earlier, a nnegative shaper solution exists for any single-mode system. Cbining these ideas, one can infer that, since all the flexible moare the same, there exists an impulse spacingT such thatcos(vdiT)<0;i51,2, . . . ,n if vdi5vd; i 51,2, . . . ,n. In otherwords, a non-negative solution exists for anynth-order single-mode zero-placement shaper. Extending this result using Threms 1 and 2, a non-negative solution exists for any two-modthree-mode zero-placement shaper where each mode has antrary order of robustness~a mixed order two-mode or three-modshaper!. Of course, each time an order of robustness is addednumber of impulses increases by two and the shaper lengtincreased by 2T.
3 Comparison of Minimum TD and FD ShaperLengths
To find theminimum Tfor two and three-mode systems wheall the shaper amplitudes are non-negative, consider the spcase of undamped systems:zA5zB5zC50. With zero damping,the two-mode FD zero-placement shaper simplifies to
b~A0d~ t !1A1d~ t2T!1A2d~ t22T!1A3d~ t23T!
1A4d~ t24T!! (3)
whereA051,
A1522~cos~vAT!1cos~vBT!!,
A254 cos~vAT!cos~vBT!12,
A35A1 ,
A451.
The following necessary and sufficient constraints guarantenon-negative FD shaper:A1>0 requires that 2cos(vBT)>cos(vAT), and A2>0 requires cos(vAT)cos(vBT)>21/2. TheearliestT at which these constraints are both met isT5tA/8, andthis occurs only at particular ratios ofvB /vA . We have numeri-cally solved for the minimumT satisfying the above constraintfor a range of mode ratios. Figure 1 shows the minimum len4T of a two-mode, undamped system input shaper as the mratio varies for the FD method and compares it to the len( i 51
2 1/(2f di) of the convolved TD method. The figure shows thfor a two-mode, undamped system the zero-placement shaperbe shorter than the convolved ZV method when the mode ratiless than five. For mode ratios greater than five, the shorter shmethod varies. These results could be used as a starting pwhen designing input shapers for two-mode systems with smdamping factors.
With zero damping, the three-mode zero-placement shaper
b~A0d~ t !1A1d~ t2T!1A2d~ t22T!1A3d~ t23T!
1A4d~ t24T!1A5d~ t25T!1A6d~ t26T!! (4)
where
SEPTEMBER 2003, Vol. 125 Õ 495
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

m
mallero-the
ro-, nu-tionain
aysthodana-ero-
me-odeieldsatesra-
un--
-a
ed
Down
A05A651,
A15A5522~cos~vAT!1cos~vBT!1cos~vCT!!,
A25A45314~cos~vAT!cos~vBT!1cos~vAT!cos~vCT!
1cos~vBT!cos~vCT!!,
A3528 cos~vAT!cos~vBT!cos~vCT!24~cos~vAT!
1cos~vBT!1cos~vCT!!.
The resulting necessary and sufficient constraints that guaraall non-negative impulse amplitudes are as follows:A1>0 re-quires cos(vAT)1cos(vBT)1cos(vCT)<0. A2>0 requirescos(vAT)cos(vBT) 1 cos(vAT)cos(vCT) 1 cos(vBT)cos(vCT)>2
34.
A3>0 in combination with the constraint onA1 yields
Fig. 1 The minimum length for undamped two-mode FDshapers compared with the length of TD shapers.
Fig. 2 A contour plot representing the length of a TD shapersubtracted from the length of a FD shaper „both for undampedsystems …. The dark region represents where the TD shaper isshorter: the light region indicates where the FD shaper isshorter. The contour lines are fractions of the period of the firstmode, t A .
496 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ntee
@cos(vAT)cos(vBT)cos(vCT)# / @cos(vAT)1cos(vBT)1cos(vCT)#>21/2. We have numerically solved for the minimumT satisfyingthese three constraints for a range ofvA , vB , andvC .
The length of an FD shaper for three-mode systems is 6T. Thelength achieved by a TD shaper for three modes is1
2(1/f A11/f B11/f C). Figure 2 shows the difference between the minimulength 6T of an undamped FD shaper and the length( i 51
3 1/(2f di)of an undamped TD shaper for a three-mode system. For smode ratios of an undamped three-mode system, the zplacement FD technique yields shorter length shapers thanconvolved TD ZV input shapers; however, the method that pduces a shorter shaper for larger mode ratios varies. Furthermerical analysis shows that Fig. 2 provides a good approximaof the differences between time-domain and frequency-domshapers even when the modes are lightly damped.
4 ConclusionWe have proven that a non-negative shaper solution alw
exists when using the zero-placement frequency-domain mefor two-mode and three-mode flexible systems. We have alsolyzed the shortest shaper lengths possible when applying the zplacement frequency-domain method and the convolved tidomain method. For undamped two-mode and three-msystems, the zero-placement frequency-domain shaper yshorter length shapers for small mode ratios, and thus eliminvibration sooner than the convolved method. For larger modetios, the method that produces a shorter shaper varies.
AcknowledgmentsThis work was supported in part by the National Science Fo
dation~Early Faculty CAREER Development Award Grant CMS9625086 and Grant CMS-0201459!, Storage Technology Corporation, the Colorado Advanced Software Institute, andUniversity of Colorado Faculty Fellowship.
AppendixTo prove Theorem 2, the total range of mode ratios is divid
into different regions. The definitions ofA(t), B(t), C(t), andt iare as outlined in the statement of Theorem 2 in Section 2.
Lemma 1. If f A< f B< f C<3 f A , then 't* such that A(t* )<0, B(t* )<0, and C(t* )<0.
Proof: f A< f B< f C<3 f A
⇒3tB/4>tA/4>tB/4 and 3tC/4>tA/4>tC/4
⇒A~ tA/4!50, B~ tA/4!<0, and C~ tA/4!<0
[ there exists at* such thatA(t* )<0, B(t* )<0, andC(t* )<0 when f A< f B< f C<3 f A . h
Note: Lemma 1 is true for any number off i if f A< f i<3 f A; i .
Lemma 2. If 73 f A< f B< f C , then 't* such that A(t* )<0,
B(t* )<0, and C(t* )<0.
Proof: f B> 73 f A⇒ 7
4tB< 34tA⇒tB,
12tA
[ there exists a regionDT,( 14tA , 3
4tA# of length 12tB where
A(t)<0 andB(t)<0.
f C> f B⇒ length~DT!5tB/2>tC/2
[ there exists at* PDT such thatC(t* )<0[ there exists at* such thatA(t* )<0, B(t* )<0, andC(t* )
<0 when f C> f B> 73 f A . h
Lemma 3. If f C>3 f A and fA< f B< 95 f A , then 't* such that
A(t* )<0, B(t* )<0, and C(t* )<0.Proof: f A< f B<9 f A/5
⇒tB/4<tA/4 and 3tB/4>5tA/12.tA/4
Let DT be the region@ 14tA , 3
4tB#. ThenA(t* )<0;t* PDT andB(t* )<0;t* PDT.
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

uce
g to
ingt.,
for
g,
u-ck-cabulicssisisedisurshisla-e-theis
dro-anduseof
icalciseof
ieceshist is ae offor
ome
ela-s. A
nal
Down
length~DT!53tB/42tA/4
f C>3 f A⇒min~ length~DT!!5tA/6>tC/2
[ there exists at* PDT such thatC(t* )<0[ there exists at* such thatA(t* )<0, B(t* )<0, andC(t* )
<0 when f C>3 f A and f A< f B< 95 f A . h
Lemma 4. If f C>3 f A and 95 f A< f B< 7
3 f A , then't* such thatA(t* )<0, B(t* )<0, and C(t* )<0.
Proof: 95 f A< f B< 7
3 f A⇒ 14tB,
14tA,
34tB and 5tB/4,3tA/4
<7tB/4
Let DT1 be the region@ 14tA , 3
4tB#.
Let DT2 be the region@ 54tB , 3
4tA#.
A~ t* !<0;tPDT1 and ;tPDT2
B~ t* !<0;tPDT1 and ;tPDT2
We need to show that there exists at* PDT1 or a t* PDT2
such thatC(t* )<0.• Let f C>4 f A⇒tC<tA/4If 9 f A/5< f B<2 f A⇒min@length(DT1)#5tA/8
[ tC/2<min@ length~DT1!#5tA/8
If 2 f A< f B<7 f A/3⇒min@length(DT2)#5tA/8
[ tC/2<min@ length~DT2!#5tA/8
[ ' a t* PDT1 or a t* PDT2 such thatC(t* )<0 when f C
>4 f A and 95 f A< f B< 7
3 f A .• Let 9f A/5< f B<243f A/125
⇒25tA/36>5tB/4 and 3tB/4>125tA/324
If 3 f A< f C<81f A/25⇒3tA/4>9tC/4>25tA/36
[94tCPDT2 , and we know thatC( 9
4tC)50.If 81f A/25< f C<4 f A⇒125tA/324>5tC/4.tA/4
[54tCPDT1 , and we know thatC( 5
4tC)50.[ ' a t* PDT1 or a t* PDT2 such thatC(t* )<0 when 3f A
< f C<4 f A and 95 f A< f B< 243
125f A .• Let 50f A/27< f B<2 f A
⇒27tA/40>5tB/4 and 3tB/4>3tA/8
If 3 f A< f C<10f A/3⇒3tA/4>9tC/4>27tA/40
[94tCPDT2 , and we know thatC( 9
4tC)50.If 10f A/3< f C<4 f A⇒3tA/8>5tC/4.tA/4
[54tCPDT1 , and we know thatC( 5
4tC)50.[ ' a t* PDT1 or a t* PDT2 such thatC(t* )<0 when 3f A
< f C<4 f A and 5027f A< f B<2 f A .
• Let 2f A< f B<7 f A/3
2 f A< f B⇒5tA/8>5tB/4
If 3 f A< f C<18f A/5⇒3tA/4>9tC/4>5tA/8
[94tCPDT2 , and we know thatC( 9
4tC)50.If 10f A/3< f C<4 f A⇒3tA/4>5tC/2>5tA/8
[52tCPDT2 , and we knowC( 5
2tC)521[ ' a t* PDT2 such thatC(t* )<0 when 3f A< f C<4 f A and
2 f A< f B< 73 f A .
[ there exists at* such thatA(t* )<0, B(t* )<0, andC(t* )<0 when f C>3 f A and 9
5 f A< f B< 73 f A . h
Proof of Theorem 2. Proof: Lemma 1 showed the existencof a t* for 3f A> f B> f A and 3f A> f C> f A . Lemma 2 showed theexistence of at* for f B> 7
3 f A and f C> f B . Lemma 3 showed theexistence of at* for 9
5 f A> f B> f A and f C>3 f A . Lemma 4showed the existence of at* for 7
3 f A> f B> 95 f A and f C>3 f A .
Therefore, there exists at* such thatA(t* )<0, B(t* )<0, andC(t* )<0; f A< f B< f C . h
Journal of Dynamic Systems, Measurement, and ControlCopyright © 2
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
e
References@1# Singer, N., and Seering, W., 1990, ‘‘Preshaping Command Inputs to Red
System Vibration,’’ ASME J. Dyn. Syst., Meas., Control,112~1!, 76–82.@2# Hyde, J. M., and Seering, W. P., 1991, ‘‘Using Input Command Pre-Shapin
Suppress Multiple Mode Vibration,’’Proc. IEEE Robotics and AutomationConf., Sacramento, CA, pp. 2604–2609.
@3# Jones, S. D., and Ulsoy, A. G., 1999, ‘‘An Approach to Control Input ShapWith Application to Coordinate Measuring Machines,’’ ASME J. Dyn. SysMeas., Control,121~2!, 242–247.
@4# Tuttle, T. D., and Seering, W. P., 1994, ‘‘A Zero-Placement TechniqueDesigning Shaped Inputs to Suppress Multiple-mode Vibration,’’Proc. Ameri-can Control Conf., Baltimore, MD, pp. 2533–2537.
Instability Due to InteractingHydraulic and Mechanical Dynamicsin Backhoes
Donald MargolisProfessor,Department of Mechanical and Aeronautical EngineerinUniversity of California, Davis, CA 95616e-mail: [email protected]
Taehyun ShimAssistant Professor,Department of Mechanical Engineering, University ofMichigan, Dearborn, 4901 Evergreen Road,Dearborn, MI 48128e-mail: [email protected]
A backhoe is a tractor-like vehicle that has a hydraulically actated bucket loader at the front and a hydraulically actuated bahoe shovel at the rear. The operator sits inside a canopy orthat is mounted to the tractor chassis, and operates the hydracontrols. The cab is typically isolated somewhat from the chausing cab mounts. There are instances when the bucket is raor lowered or wrapped that an instability of the entire machineexcited. In this mode, a frequency oscillation of the vehicle occand the operator is unable to keep his hands on the controls. Tinstability is investigated here and demonstrated through simution. The instability described here is due to an interaction btween the mechanical dynamics and hydraulic dynamics ofmachine. All instabilities require an energy source, and, in thcase, the energy comes from the fuel. It turns out that the hymechanical interaction has positive feedback componentsproduces an instability. In order to expose the fundamental caof the instability, a model is needed that allows the interactionmechanical and hydraulic components. Bond graphs are a logchoice for development of the model. Bond graphs are a conpictorial representation of the interactive dynamics of all typesenergetic systems. They allow the model to be developed in pand then put together into an overall computational model. Tprocedure is demonstrated for the system here. The end resulreasonably low order model that exposes the fundamental causthe instability in backhoes. It also allows assessment of curesthe problem, some requiring redesign of components, and srequiring an automatic stabilization control system.@DOI: 10.1115/1.1591809#
IntroductionA backhoe consists of a heavy chassis sitting upon large, r
tively soft tires, with no suspension between chassis and tire
Contributed by the Dynamic Systems, Measurement, and Control Division of THEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division August 2, 2002; firevision, December 27, 2002. Associate Editor: N. Manring.
SEPTEMBER 2003, Vol. 125 Õ 497003 by ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

y
y
t
i
a
o
e
hh
e
aia
to.t
es-m.sed
er-
tly
Thed
ith
the
t theisis
d
2.
by
entsach-o-ex-
Down
bucket loader is located at the front of the vehicle, and a backshovel is at the rear. These attached devices are hydraulicalltuated, and there are multiple cylinders present to accomplishrequired kinematic motions. The operator sits inside a canopcab and controls the hydraulics with various control levers apedals. A schematic of a backhoe is shown in Fig. 1 where othe bucket loader is attached.
The canopy or cab is attached to the chassis with some typisolating mounting system. The function of the cab mountsprincipally to isolate the operator from engine vibration whenvehicle is more or less stationary. During actual operation,environment is so harsh that engine vibration is a small contrtor to overall comfort. In order to provide cab isolation, thmounting system must be as soft as possible.
It has been observed that some backhoes, when raising, loing, or wrapping the bucket loader, become violently unstableshake at a high frequency. This instability can be so severe thaoperator cannot keep his hands on the controls. And, in sinstances, the instability continues even after the operator islonger touching the controls.
There has not been much written about the stability of thmachines, and very little has been written about their dynamAutomation of these machines has a growing interest in ordeimprove efficiency, productivity, and safety. For the case of adraulic excavator, kinematic and dynamic analyses of the macmotion were derived using Newton–Euler and Euler–Lagrang
methods in Refs.@1–4#. Some applications of the control methodologies to assist the operations of the excavators are presin @4–10#. These papers mainly discuss the control laws needeovercome disturbances and nonlinearities in the hydraulic actors in order to achieve a desired work level. However therenot many papers, which deal with the stability of the hydrauexcavator. In@11#, an operator induced instability is addresseThe coupled vibration phenomena between the vehicle andoperator is studied.
A model is proposed here that includes the interactive mechcal and hydraulic dynamics, and exposes the instability descrabove. Bond graphs@12# are used for the model developmentthey greatly facilitate coupling multiple energy domains intosingle overall model.
Model DevelopmentThe authors were able to observe the instability of an ac
machine. These observations suggested that a two-dimensipitch-plane model would be sufficient to expose the instabilityis true that the interaction between the bucket loader and the
498 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
hoeac-theor
ndnly
e ofis
hethebu-e
wer-nd
t themeno
seics.r toy-ine
e
-nted
d totua-arelicd.the
ni-bedsa
ualnal,It
rac-
tor chassis is not perfectly symmetric, and differences in tire prsures contribute to the excitation of roll dynamics in the systeNevertheless, the fundamental dynamic behavior is well expresin a two-dimensional model.
Figure 1 shows the backhoe with various dimensions and intial parameters indicated. The body is assumed rigid of mass,mt ,and pitch inertia,Jt . The chassis cg is locatedat from the frontaxle andbt from the rear axle. The tires are modeled as lighdamped compliance elements with stiffness and damping,kt f
, bt f
at the front andktr, btr
at the rear.The canopy or cab sits atop the chassis as shown in Fig. 1.
cab has its own cg locationac distance from the front mounts anbc distance from the rear mounts. The cab has mass,mc , andpitch inertia,Jc . The mounts are modeled as linear elements wstiffness and damping,kmf
, bmfat the front andkmr
, bmrat the
rear. The cab cg is located with respect to the chassis cg bydistancel ct .
The boom for the bucket loader is attached to the chassis aupper pin joint and the hydraulic cylinder that moves the boomattached at the lower pin joint as shown in Fig. 1. The boommodeled as a rigid body with cg location,l 1 , from the attachmentpin. The boom has mass,mb , and rotational inertia,Jb . The up-per and lower pin joints arel 3 distance apart, and the cylinder rois attached to the boom a distance,l p , along the boom.
Kinematics of the BoomA velocity diagram of the chassis and boom is shown in Fig.
The chassis cg has vertical velocity,yt , and angular velocity,u t .The motion of the boom relative to the chassis is characterizedthe angle,u, and its derivatives. The angle,f, is the angle of thecylinder relative to the chassis. The chassis motion componare transferred appropriately to the boom cg and the rod attment to the boom as indicated. Through straight forward trignometry, the instantaneous length of the cylinder, S, can bepressed as
S5 l pA11S l 3
l pD 2
12l 3
l psinu (1)
This can be differentiated to relateS to u, as
S5M3u (2)
where
Fig. 1 Schematic and various dimensions of the backhoe model
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

Journal of Dyna
Downloaded 11 Nov 201
Fig. 2 A velocity diagram of the chassis and boom
Fig. 3 Partial bond graph of the system
mic Systems, Measurement, and Control SEPTEMBER 2003, Vol. 125 Õ 499
0 to 134.153.27.1. Redistribution subject to ASME license or copyright; see http://www.asme.org/terms/Terms_Use.cfm

t
ssis,. 3.the
-ph.
lvehas
e,
Dow
M35l p~ l 3 / l p!cosu
A11S l 3
l pD 2
12l 3
l p
sinu
(3)
The boom cg velocity components can be resolved into a vercomponent,vbV
vbV5 yt1M2u t1 l 1 cos~u1u t!u (4)
where,
M25c1 cosu t1 l 1 cos~u1u t!2~h11 l 3!sinu t (5)
and a horizontal component,vbH
vbH5M1u t1 l 1 sin~u1u t!u (6)
where
M15c1 sinu t1 l 1 sin~u1u t!1~h11 l 3!cosu t (7)
500 Õ Vol. 125, SEPTEMBER 2003
nloaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ical
These kinematic relationships and the dynamics of the chacab, and boom are shown in the partial bond graph of FigThemodulated transformers, -MTF-, appropriately enforcekine-matic constraints of Eqs.~2!–~7!. In so far as possible, the corresponding physical elements are pointed out in the bond graNext comes the hydraulic dynamics.
Hydraulic Dynamics
Figure 4 shows a schematic of the hydraulic cylinder and vaused to raise and lower the bucket loader. The cylinder pistondiameter,Dp , area,Ap , and the rod has area,AR . The chamberbelow the piston has pressure,P1 , and flow,Q1 , is positive intothe cylinder. The chamber above the piston has pressure,P2 , andflow, Q2 , is positive out of the cylinder. With this convention, thpositive configuration is for the boom being raised and lengthS,increasing.
Fig. 4 Schematic of the hydraulic cylinder and valve used to raise and lowerthe bucket loader
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

.a
ed in
st orto
’ tove is
ivem-
Down
It is assumed that each chamber has fluid compliance,C1 , C2 ,where
C15V1
b(8)
and
C25V2
b(9)
where V1 , V2 are the respective instantaneous volumes ofchambers andb is the bulk modulus of the fluid. The bulk modulus of a fluid is, like most parameters, variable to some degreedissolved in the fluid can accumulate as the fluid is workedtemperatures rise. Shock absorbers can exhibit dramatic chain their behavior as their temperture increases. In the applicahere, any variation in the bulk modulus does not contribute toinstability of the system, and thus a constant parameter was u
For the variables listed in the figure
V15Apx (10)
and
V25~Ap2AR!~ l cyl2x! (11)
where
x5S2 l cyl (12)
The valve is directly activated by the operator. Here it is assumthat the valve spool position is an input,y, to the hydraulic model.
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
the-Airndngestionthesed.
ed
Later this input will come from the operator and from relativmotion between cab and chassis. When the valve is displacethe positive direction, the supply pressure,Ps , is exposed to thelower chamber and the upper chamber is exposed to exhauatmospheric pressure. Thus the lower chamber will begincharge to a high pressure while the upper chamber will ‘‘bleed’the lower pressure. Just the opposite happens when the valdisplaced in the negative direction.
It is assumed that the flow through the valve is purely resistand governed by the constitutive relations for turbulent incopressible flow, thus
Q15pDsyAS 2
r D uPs2P1usign~DP1! (13)
and
Q25pDsyAS 2
r D uDP2usign~DP2!
where
for y>0 DP15Ps2P1 (14)DP25P220
and
for y,0 DP1502P1 (15)DP25P22Ps
Fig. 5 Schematic and bond graph of the chassis and cab with the control stick
SEPTEMBER 2003, Vol. 125 Õ 501
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

d
unttputsid-t. Aunden-for
f aalveta-
mblego-
ofed,
licspri-
Down
Also shown in Fig. 4 is the bond graph fragment that represethe hydraulic dynamics.
It is recognized that Eqs.~13!–~15! is a simplified accountingof the workings of a spool valve. In reality there are severalsigns for hydraulic spool valves which include a first stage torqmotor, flapper nozzle valves, and ‘‘feedback wire.’’ In additio
Fig. 6 Comparison of valve motion, y Õy max , for standard cabmounts, mounts with double stiffness, and standard cabmounts with flow control
Table 1 Backhoe simulation parameters
Parameter Value
CabMass of cab,mc 118.0 kgPitch moment of inertia of cab,Jc 188.0 kg m2
Distance, cab cg to front mount,ac 0.72 mDistance, cab cg to rear mount,bc 0.91 mDistance, chassis cg to cab cg,l ct 0.56 mMountStiffness of front mount,kmf 6.0e5 N/mDamping of front mount,bmf
10670.3 N s/mStiffness of rear mount,kmr 6.0e5 N/mDamping of rear mount,bmr
10670.3 N s/mBodyMass of body,mt 2426.0 kgPitch moment of inertia of body,Jt 3689.0 kg m2
Distance, body cg to front axle,at 1.17 mDistance, body cg to rear axle,bt 0.97 mDistance, body cg to pin joint,c1 0.34 mTireStiffness of front tire,kt f 4.15e5 N/mDamping of front tire,bt f
1387.0 N s/mStiffness of rear tire,ktr 4.15e5 /mDamping of rear tire,btr
1387.0 N s/mBoomMass of boom,mb 916.0 kgPitch moment of inertia of boom,Jb 785.0 kg m2
Distance, boom cg to attachment pin,l 1 1.73 mDistance, boom cg to loader,l 2 0.21 mDistance, upper and lower pin joints,l 3 0.61 mDistance, cylinder rod attachment to boom,l p 1.3 mDistance, pin joint to body cg,h1 0.36Hydraulic cylinderDiameter of piston,Dp 0.0889 mDiameter of rod,Dr 0.0508 mLength of cylinder,l cyl 0.9144 mBulk modulus of fluid,b 6.89e8 N/m2
Supply pressure,Ps 2.06e7 N/m2
502 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
nts
e-uen,
the flow ports are designed to reduce flow forces and to accofor the difference in piston area across a cylinder due to the oushaft being on one side and not the other, and part of this coneration is the flow area dependence on spool displacemenrather complete treatment of spool valve dynamics can be foin Ref. @13#. Here we assume that the flow area is linearly depdent on the spool position, and that the flow area is symmetricboth directions of spool motion. The valve is just one part orather complex overall system, and these assumptions about vbehavior will not contribute significantly to understanding the sbility of the whole system.
Assembling the Complete ModelThe virtue of bond graphs becomes apparent when we asse
the fragments into an overall model. Through rather simple trinometric relationships, the rate of change of cylinder length,S,was derived in Eq.~2!, and shown exposed in the bond graphFig. 3. The hydraulic bond graph of Fig. 4 also has the exposS. To assemble the overall interactive model of the hydrauand the mechanics we simply append Figs. 4 to 3 at the appro
Fig. 7 Comparison of boom motion for standard cab mounts,mounts with double stiffness, and standard cab mounts withflow control
Fig. 8 Comparison of the angular motion of the tractor chas-sis using standard cab mounts, mounts with double stiffness,and standard cab mounts with flow control
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

Journal of Dyn
Downloaded 11 Nov 201
Fig. 9 Schematic and bond graph of the chassis and cab with the active flow control
t
m
r
u
l
h
a
g
h
t
o
aint
rce,ontivem
edto besalf theults
avehatsignsizetialcabere,
itynd, the
ate location. This may seem trivial, but remember, the mannewhich the hydraulic forces push on the pin joints and excitechassis has never been discussed. Because we use power coing transformers, we are guaranteed that the forces are autocally correct when we connect the 2 partial bond graphs toget
Assigning causality to the bond graph of Figs. 3 and 4 indicathat derivative causality will exist for both the vertical and hozontal momenta of the boom. This means that the modelingsumptions made in constructing this model have led to a mothat will not compute easily with a computer. This is not the faof bond graphs, but would be true regardless of one’s approacmodeling subject to the same assumptions. To fix this probeasily we use the ‘‘Karnopp–Margolis’’ method@12# and appendvery stiff springs and dampers at the pin joints. These are poinout in Fig. 3. This allows a causal model to result with straigforward simulation properties. In practice these additional ements are selected to produce frequencies well outside the rof interest. In this case, the elements were chosen to produceHz frequencies since we are interested in frequencies no hithan 20 Hz and no modal dynamics have been included for anthe mechanical or fluid parts of the system.
At this point we have an overall model which would predict tmotion-time history of the system for any input,y, to the valve.
Adding the Control Stick to the ModelFigure 5 shows the chassis and cab with the control s
mounted on the cab and the valve body mounted on the chaThe valve motion,y, can be related to the chassis and cab motiby
amic Systems, Measurement, and Control
0 to 134.153.27.1. Redistribution subject to ASME lic
r inhenserv-
ati-her.tesi-as-dellt
h toem
tedt-le-nge200her
y of
e
ickssis.ns
y52~vc1acsvc!1
l 2
l 1xs2@2v t1~ l ct2ac!v t# (16)
The bond graph fragment shown in Fig. 5 enforces this constrand is appended to the model in Fig. 3. A mass,mlink , has beenassigned to the linkage, and a stiffness and damping,kv , bv ,are attached to the valve spool. The operator can input a foFs , on the stick and move the valve input, but relative motibetween the cab and chassis will also move the spool relato the valve body. This fact is the primary trigger for the systeinstability.
SimulationThe equations of motion for the entire system were deriv
directly from the assembled bond graph and were guaranteedexplicit first order differential equations by assuring that no cauproblems exist. These equations were simulated using one omany commercial, explicit equation solvers. Some of the resare presented here.
There are unlimited simulations that can be run once we han operational overall model. Here it is simply demonstrated tthe model is reasonable, and the use of the model for depurposes is left to another time. Parameters for a mediumbackhoe were used in the simulation. These include all inerproperties as well as compliance properties for the tires andmounts. Table 1 shows the parameters. For the simulations hthe model was initialized at very near equilibrium in a gravfield with the boom virtually horizontal. The valve is closed, athe cylinder pressures are zero. When the simulation is started
SEPTEMBER 2003, Vol. 125 Õ 503
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

e
v
efl
n
d
r
d
uha
lud
t
r
ot
tt
t
ssi
r
96,J.
a-
,’’
ofu-
ce/E
or
of
res-EE
pp.
l
s azedtrolo aodsst-ctu-
don ofood
fferua-ticof
om-tor,
ve athems
nal
Down
boom sinks slightly due to gravity as the boom weight is compsated by the build up of pressure in the lower part of the cylindThe boom motion excites the chassis which in turn excitescab. The relative motion between chassis and cab makes themove due to the linkage kinematics. There is a small deadzwhere valve motion does not create any flow area. Once this dzone is exceeded, some valve flow area exists and hydrauliccan commence.
As can be seen in Figs. 6–8, with the conventional cab mouthe system is unstable. Figure 6 shows the valve motion nomensionalized by the maximum valve opening. The valve motquickly builds to the maximum and bangs continuously betwemaximum positive and negative opening. Figure 7 shows thestable angular motion of the boom. This has the appearancwhat was observed on the actual backhoe. Figure 8 showscorresponding chassis angular motion. It is bouncing arounplus–minus 4°.
The mount stiffnesses at the front and rear of the cab wdoubled from their nominal values and the simulation wasagain. The results are also shown in Figs. 6–8. As can be seenentire system is stable and well behaved. This also corresponthe trend observed on the actual backhoe.
Although the instability in the backhoe can be resolved bying stiffer cab mounts, this will degrade the ride motion at tidle speed. Another way to stabilize the backhoe is with automcontrol. Here the response of the backhoe system with a feback control is demonstrated. It is assumed that a displacemtype actuator is installed in the valve control rod as shown in F9. Here the actuator is proposed to be a DC motor withballscrewused to convert rotary to linear motion. For controdesign purposes, this actuator is represented by the flow soSf2, shown in the bond graph fragment of Fig. 9. Once thesired boom position is set by the operator, the error betweendesired valve position and actual valve position is fed back tocontrol unit and the flow source is activated to reduce the erHere it was found the Proportional plus Integral control workfine. As shown in Figs. 6–8, the entire system is stable andresponses are similar to the stable passive system with the smounts.
While it is not possible to publish the measured motion-timhistories of the system response, the model presented hequalitatively accurate and was very useful in the design of a ‘‘fifor the instability of the vehicle. The model allowed testingmany different approaches to solving the stability problem wiout requiring hardware realizations for each.
ConclusionsA complete pitch/plane model of a backhoe was developed
includes the hydraulic dynamics and kinematics of the conlinkage. The model was developed in pieces using bond grfragments, and the overall model was assembled by straighwardly assembling the bond graph fragments. Equations wererived directly from the bond graph and programmed for simution using a digital computer.
Simulations were run for an initial condition response fronear equilibrium. The model predicts the instability observedthe actual backhoe, and is now ready to be used as a designfor future backhoe development.
It was shown that the backhoe can be stabilized passivelyusing stiffer mounts between chassis and cab. This solutioncause an increase in cab acceleration during engine idle testautomatic control solution was also demonstrated. This consiof an actuator in series with the valve control rod. By measurand feeding back valve position, the controller was demonstrato stabilize the system without requiring stiffer cab mounts.
References@1# Vaha, P. K., and Skibniewski, M. J., 1993, ‘‘Dynamic Model of Excavator,’’
Aerospace Eng.,6~2!, pp. 148–158.
504 Õ Vol. 125, SEPTEMBER 2003 Copyright
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
n-er.thealveonead-ow
nts,di-
ionenun-e oftheat
ereun, thes to
s-eticed-ent-ig.a
lerrce,e-thetheror.edtheiffer
ee isx’’f
h-
hatrolaphfor-de-
la-
montool
bywill. Antedngted
J.
@2# Koivo, A. J., Ramos, M. C., and Thoma, M., 1994, ‘‘Dynamic Model foExcavators~and Backhoe!,’’ IFAC Symposium on Robot Control, pp. 763–768.
@3# Koivo, A. J., 1994, ‘‘Kinematics of Excavators~Backhoes! for TransferringSurface Material,’’ J. Aerospace Eng.,7~1!, pp. 17–32.
@4# Koivo, A. J., Thoma, M. C., Kocaoglan, E., and Andrade-Cetto, J., 19‘‘Modeling and Control of Excavator Dynamics During Digging Operation,’’Aerospace Eng.,9~1!, pp. 10–18.
@5# Vaha, P. K., and Skibniewski, M. J., 1993, ‘‘Cognitive Force Control of Excvators,’’ J. Aerospace Eng.,6~2!, pp. 159–166.
@6# Koivo, A. J., and Song, B., 1998, ‘‘Neural Adaptive Control of ExcavatorsIEEE Intl. Conf. Of Robotics and Automation,1, 8120817.
@7# Plonecki, L., Trampczynski, W., and Cendrowicz, J., 1998, ‘‘A ConceptDigital Control System to Assist the Operator of Hydraulic Excavators,’’ Atom.Constr.,7, pp. 401–411.
@8# Nguyen, Q. H., Ha, Q. P., Rye, D. C., and Durrant-Whyte, H. F., 2000, ‘‘ForPosition Tracking for Electrohydraulic Systems of a Robotic Excavator,’’ IEEConf. On Decision and Control, Sydney, Australia, pp. 5224–5229.
@9# Haga, M., Hiroshi, W., and Fujishima, K., 2001, ‘‘Digging Control System fHydraulic Excavator,’’ Mechatronics,11, pp. 665–676.
@10# Chang, P. H., and Lee, S., 2002, ‘‘A Straight-Line Motion Tracking ControlHydraulic Excavator System,’’ Mechatronics,12, pp. 119–138.
@11# Arai, F., Tateishi, J., and Fukuda, T., 2000, ‘‘Dynamical Analysis and Suppsion of Human Hunting in the Excavator Operation,’’ Proc. of the 2000 IEIntl. Workshop on Robot and Human interactive Commu. Osaka, Japan,394–399.
@12# Karnopp, D. C., Margolis, D. L., and Rosenberg, R. C.,System Dynamics:Modeling and Simulation of Mechatronic Systems, 3rd ed., John Wiley & Sons,NY, 2000.
@13# Margolis, D., and Hennings, C., 1994, ‘‘Stability of Hydraulic Motion ControSystems,’’ ASME FPST,1, pp. 65–74.
Control Design for Relative Stability ina PWM-Controlled PneumaticSystem
Eric J. Barth, Jianlong Zhang, and MichaelGoldfarbDepartment of Mechanical Engineering, VanderbiltUniversity, Nashville, TN 37235
This paper presents a control design methodology that provideprescribed degree of stability robustness for plants characteriby discontinuous (i.e., switching) dynamics. The proposed conmethodology transforms a discontinuous switching model intlinear continuous equivalent model, so that loop-shaping methmay be utilized to provide a prescribed degree of stability robuness. The approach is specifically targeted at pneumatically aated servo systems that are controlled by solenoid valves andnot incorporate pressure sensors. Experimental demonstratiothe approach validates model equivalence and demonstrates gtracking performance.@DOI: 10.1115/1.1591810#
IntroductionMany papers that treat the control of pneumatic systems o
some introductory claim about the low cost of pneumatic acttion. Such a claim is in part justified, since a typical pneumaactuator costs on the order of tens of U.S. dollars. The claimlow cost, however, is also somewhat misleading, since the cponents required for the servo control of a pneumatic actuaspecifically the proportional valve and pressure sensors, hacombined cost typically an order of magnitude greater thanactuator itself. Specifically, servo control of pneumatic syste
Contributed by the Dynamic Systems, Measurement, and Control Division of THEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division June 17, 2002; firevision, December 27, 2002. Associate Editor: N. Manring.
© 2003 by ASME Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

o
whl
c
n
e
s
i
t
e
flo
d
a
vu
e
r
a
a
n
n
torgnilitytionodelousnce
eachidsure
er insultthean
ndery-ef theoolude
con-
talf ther the
thetate
ics
Down
typically requires some type of proportionally controllable valvwhich enables control of cylinder pressures via proportional cstriction of the pneumatic flow~i.e., throttling!. Most frequently,these valves are a proportional servovalve type, which is a 4-spool valve with a position-controllable spool. Control approacfor pneumatic servo systems that utilize proportional servovaare described in papers by Liu and Bobrow@1#, Bobrow and Jab-bari @2#, Bobrow and McDonell@3#, and Drakunov et al.@4#, andKimura et al.@5#, among others. Other works treating the sercontrol of pneumatic actuators incorporate~noncommercially-available! alternative configurations of proportional valves, suas jet pipes valves~Jacobsen et al.@6#, Henri et al.@7#! or flappervalves ~Ben-Dov and Salcudean@8#!. Regardless of the valvetype, the proportional valve required to implement a proportiocontrol approach is one of the most expensive componentspneumatic servo system, typically costing on the order of sevhundred U.S. dollars.
In addition to a proportional servovalve, pressure sensorstypically incorporated in pneumatic servo controllers to measthe pressure states for feedback control. Due to the compresity of air, the pressures on each side of a pneumatic cylinconstitute two states of the basic dynamic model of a pneumservo system. Though pressure feedback is utilized for varpurposes, the most fundamental reason requiring its use in scontrol is to distinguish between the choked and unchoked flconditions that result from compressible flow through the convalve. Such conditions are unobservable from measuremenmotion and/or force at the output of the actuator.
This paper presents a control methodology that enables scontrol of a pneumatic actuator without a proportional valvepressure sensors. Specifically, the methodology providescontrol via binary-position solenoid valves rather than proptional valves, and concomitantly enables a prescribed degrestability robustness in order to adequately compensate for theof information that results from the absence of pressure sensSince the cost of solenoid valves is on the order of ten U.S.lars, the use of solenoid instead of proportional valves, along wthe elimination of pressure sensors, can reduce the cost of pmatic servo control implementation by an order of magnitudecan therefore provide high-power actuation at a significanlower cost relative to a power-comparable DC motor-actuasystem.
Several prior works have demonstrated the viability of sercontrol of pneumatic actuators via solenoid on–off valves, incling the work of Ye et al.@9#, Kunt and Singh@10#, Lai et al.@11#,Royston and Singh@12#, Paul et al.@13#, Norigitsu @14–16#, Shihand Hwang@17#, and van Varseveld and Bone@18#. None of theseprior works, however, enable a prescribed degree of stabilitybustness. As previously mentioned, such stability robustnesparticularly important in the absence of pressure sensors, sinccontroller cannot otherwise distinguish between choked andchoked flow through the valve, and thus the robustness ofcontrol approach must adequately and reliably compensate foloss of pressure information. This paper provides a methodtransform the nonanalytic, nonlinear description of pulse-widmodulated~PWM! based control of a pneumatic system intoanalytic, linear model, which in turn enables the applicationfrequency domain loop shaping to address issues of performand stability robustness. The switching aspect enables use olenoid ~rather than proportional! valves, and the robustness eables elimination of pressure sensors, both of which effectivreduce the cost of implementation by an order of magnitude. Tapproach is illustrated by way of example on a single degreefreedom pneumatic servo system.
Modeling a Pneumatic Servo System Controlled bySwitching Valves
A schematic of a single degree-of-freedom pneumatic actuasystem is shown in Fig. 1. The general objective of this sectio
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
e,n-
ayes
ves
vo
h
alof aral
areureibil-
deraticouservoowrolt of
rvoorowr-
e oflossors.ol-ith
neu-ndtlyted
o-d-
ro-s is
theun-thetheto
th-nofnce
f so--
elyhis-of-
tionis
to cast the dynamics of the PWM-controlled pneumatic actuainto a linear continuous form, in order to apply control desitechniques that incorporate frequency domain concepts of stabrobustness, and more specifically that enable the implementaof prescribed gain and phase margins. A lumped-parameter mthat treats all unmodeled forces, such as Coulomb and viscfriction and external disturbance forces, as a single disturbaterm is given as
Mx5PBAB2PAAA1Fdisturbance (1)
wherePA andPB are the~gage! pressures inside chambersA andB of the pneumatic actuator respectively andAA and AB are theareas of the piston seen by each chamber. The pressure inchamber will be controlled by a two-position three-way solenovalve that serves to connect the chamber to either a high-pressupply or to atmospheric pressure.
The pressure response in each chamber should be first ordcharacter, assuming that the primary energetic behavior will refrom flow resistance of the valve and flow capacitance ofcylinder volume. The pressure dynamic in each cylinder ctherefore be reasonably modeled by
tA,BPA,B1PA,B5vA,B~ t2TD! (2)
where the discrete control inputvA,BP$0,Ps% is the pressureboundary condition imposed by the valve state~either atmosphericor supply pressure!; the time constanttA,B is a typically nonlinearfunction of the upstream and downstream pressures, the cylidisplacement (x), and various other geometric and thermodnamic quantities; andTD is the time delay exhibited between thcontrol command and the pressure dynamic as a byproduct ospool/sleeve overlap required to inhibit leakage flow in the spvalves. In order to provide linear system dynamics and precldependence on pressure sensors, the pressure dynamic timestant was assumed for this treatment to be invariant~i.e., constantso thattA,B5t). Such an assumption captures the fundamendynamics of the system, but assumes that the robustness ocontrol approach can adequately and reliably compensate foloss of information.
The controller can command one of four switched modes topneumatic actuator, corresponding to one of the four valve spermutations (vA ,vB) given by$0,Ps%3$0,Ps%:
Mode 1: vA5Ps and vB50
Mode 2: vA50 and vB5Ps
Mode 3: vA5Ps and vB5Ps
Mode 4: vA50 and vB50
Each mode results, respectively, in the following system dynam~assuming the disturbance force to be zero!:
Mode 1: M ~t x~ t !1 x~ t !!5Pse~ t2TD!AA (3a)
Mode 2: M ~t x~ t !1 x~ t !!52Pse~ t2TD!AB (3b)
Fig. 1 Schematic diagram of a pneumatic inertial positioningsystem actuated with a double-acting pneumatic cylinder andcontrolled with two binary „2-position … 3-way pilot-assisted so-lenoid valves.
SEPTEMBER 2003, Vol. 125 Õ 505
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

h
a
t
t
c
cv
lorf
d
con-os on
al,tiveuchectlyedustsors,cifi-d
ad-theand
in asferp-the
the
a
-
Down
Mode 3: M ~t x~ t !1 x~ t !!5Pse~ t2TD!AA2Pse~ t2TD!AB
(3c)
Mode 4: t x~ t !1 x~ t !50 (3d)
wheree(t) is the unit step.
Average ModelState-space averaging can be utilized to convert the switc
model given in Eqs.~3a-d! to a continuous average model@19#,which can be utilized for implementing a robust control desigDenoting asd1 , d2 , d3 , and d4 the fractions of a normalizedswitching period that each mode is active~i.e., the duty cycle ofeach mode!, a state-space average representation of the sysresults in the following average model:
Mt x~ t !52Mx~ t !1Pse~ t2TD!@AAd12ABd21~AA2AB!d3#(4)
where
d11d21d31d451. (5)
Note that the switching fractiond4 drops out of Eq.~4!, due to theconstraint of Eq.~5! and a common term present in all modesEqs.~3a-d!. Denoting the input term as
u~ t !5AAd12ABd21~AA2AB!d3 (6)
the average model is given in thes-domain as
G~s!5X~s!
U~s!5
e2TDsPs
Mts31Ms2(7)
The average model given by Eq.~7! assumes that the inputu(t)can vary continuously in time, which is not the case. Specificaonce a given duty cycle is commanded, the control commcannot be changed until the next PWM period. The control comand is therefore subjected to a sample-and-hold operaGiven the standard frequency domain approximation of a samand-hold, the transfer function of the average model fromcontinuous control commandu(t) to the motion of the outputx(t)can be given as:
G~s!5X~s!
U~s!5
12e2Ts
Ts
e2TDsPs
Mts31Ms2 (8)
It should be emphasized that the zero-order sample-and-holdfect is not the result of digital implementation but instead duethe PWM nature of the control signal. As an aside, electriPWM amplifiers typically switch on the order of 10 kHz. In sucapplications, it may be assumed that the sample-and-hold effenegligible. In pneumatic applications the sample-and-holdhave a non-negligible effect on the dynamics of the serpositioning system due to its longer switching period, and so mbe included.
Control DesignThough the switching system described by Eqs.~3a-d! has been
described by the continuous-time frequency domain model of~8!, the PWM-controlled system is still not of the form necessato apply standard frequency domain techniques. Specifically,control input, nominally given by Eq.~6!, requires an additionaconstraint to uniquely specify the control. Though one could fmulate various constraint equations, for purposes of this papethird mode was simply eliminated, since it is not requiredmotion control of the actuator. Accordingly, positive control inpvalues are specified by Mode 1 and negative values specifieMode 2 as follows:
u~ t !5AAd12ABd2 (9a)
where
506 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ing
n.
tem
of
lly,ndm-ion.ple-he
ef-toalhct isano-ust
Eq.rythe
r-the
orut
by
d15sat~u/AA!, d250; for u>0 (9b)
d150, d25sat~2u/AB!; for u,0 (9c)
where the saturation functions are implemented to ensure thedition given by Eq.~5!. Note that this control specification alsaddresses the asymmetric influence of unequal piston areaopposing sides of the pneumatic actuator~due to the single rodconfiguration!.
The combination of Eqs.~8! and~9a-c! enable treatment of thePWM-controlled pneumatic actuator as a linear, analyticcontinuous-time system, which in turn enables the use of relastability notions. Though several approaches to the design of ssystems are available, the use of loop shaping addresses dirtwo significant issues in the control design of PWM-controllpneumatic actuators. The first is stability robustness, which mbe present to compensate for the elimination of pressure sen~and the resulting loss of information!. The second is saturationwhich is a fundamental aspect of PWM-based controllers. Specally, as described by Eqs.~9a-c!, the duty cycles cannot excee100%, and so the control commandu(t) is bounded by@2AB ,AA#. The former issue, stability robustness, can bedressed directly in a loop-shaping approach by simply shapingopen loop frequency response so that it exhibits desired gainphase margins~e.g., with a lead-lag form of compensator!. Thelatter issue, saturation, can also be addressed fairly directlyloop-shaping context. Rather than shape the open-loop tranfunction, one can constrain the maximum gain on the looshaping compensator to avoid saturation, given bounds oninput to the compensator~i.e., bounds on the tracking error!. Forthe case of a pneumatic cylinder, the maximum amplitude oferror signal will be the stroke length of the cylinder,L. In order toavoid the saturation limits@2AB ,AA# of the control commandu(t), the frequency response of the compensatorK(s) must besuch that
uK~s!umax5min~ uAAu,uABu!
L(10)
Control of a Pneumatic Servo System Controlled bySwitching Valves
The proposed control methodology was implemented onpneumatic system as depicted in Fig. 1 with a 1.9 cm~3/4 in!inner diameter, 10 cm~4 in! stroke single-rod double-acting pneumatic cylinder~Bimba 044-DXP! equipped with two pilot assisted
Fig. 2 Open-loop frequency response plots of the equivalentmodel G„s …. Parameters used are those for the particular ap-plication of interest with MÄ10 kg, tÄ9 ms, TDÄ19 ms, PÄ586 kPa gage „85 psig … and TÄ38.5 ms „26 Hz PWM switchingfrequency ….
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

c
a
r
.
oo
h
n
Down
3-way solenoid-activated valves~SMC VQ2200H-5B!. The cylin-der rod is rigidly connected to a 10 kg brass block on a track wlinear bearings~Thompson 1CBO8FAOL10!. The setup is instru-mented with a linear potentiometer~Midori LP-100F! for positionfeedback. Model parameters were estimated or measured toM510 kg, AA52.8 cm2, and AB52.5 cm2. Additionally, thepressure response described by Eq.~2! was measured at the midstroke position and the pressure time constant and valve timelay were determined to bet59 ms andTD519 ms, respectively.The supply pressure wasPs5586 kPa gage~85 psig! and thePWM switching period wasT538.5 ms ~26 Hz switching fre-quency!. The open loop frequency response of this system,described by Eq.~8!, is shown in Fig. 2. Based on the frequenresponse shown in Fig. 2, a compensator was designed to proan open-loop frequency response that would provide a desdegree of stability robustness and additionally avoid control sration, while also maintaining a high low-frequency gain for puposes of command following and disturbance rejection. Thesulting compensator was given by:
K~s!5kS s1a3
s D S a1s11
a1b1s11D S a2s11
a2b2s11D (11)
wherek53.9831025 (288 dB), a357.54, a153.01, b153.1131022, a251.8031021, andb254.9131022. This is a doublelead, single lag compensator where the first lead network islected to add 70° of phase at 0.3 Hz, the second lead netwoselected to add 65° of phase at 4.0 Hz, and the lag networselected to add integral action with a break-point of 1.2 Hzbound ofuK(s)u,252 dB ensures that the control output shounot saturate for errors in the frequency band of interest of apprmately 0.02–2 Hz. The frequency response of this compensatshown in Fig. 3. With this compensator, the frequency responsthe open-loop transfer functionK(s)G(s) is shown in Fig. 4 alongwith the uncompensated plant and the compensator. Stabilitybustness measures are 6.7 dB of gain margin and 33° of pmargin with a crossover frequency of 2.0 Hz.
Experimental ResultsThe compensator described by Eq.~11! and Fig. 3 was experi-
mentally implemented on the previously described experimesetup. In order to ensure a reasonable approximation ofsample-and-hold used in Eq.~8!, a prefilterF(s) was placed onthe command to the control loop. The filterF(s) has the form ofa critically damped second-order low-pass filter
Fig. 3 Frequency response plots of the compensator K „s …obeying the saturation gain limit of À52 dB imposed by PWMcontrol near the targeted cross-over frequency of 2 Hz.
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
ith
be:
-de-
asyvideiredtu-r-re-
se-k isk isA
ldxi-r is
e of
ro-ase
talthe
Fig. 4 Frequency response plots of the uncompensated open-loop system, the compensator, and the compensated open-loop system. The compensated open-loop response shows aphase margin of 33° and a gain margin of 6.7 dB at a cross-overfrequency of 2.0 Hz.
Fig. 5 Step response. The filtered commanded step is shownas dashed and the measured system response is shown assolid.
Fig. 6 Sinusoidal response at 0.5 Hz
SEPTEMBER 2003, Vol. 125 Õ 507
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

a
l
si
if
.s
m
sr
ti-actflu-. Atted
urech a
thetlyen-
nts anto aodsility
ofperi-delen-
emt.,
and
ofu-
earou-
za-ct.,
, K.
dtua-
atic
eu-.
ffol,
eng.,
tedt.,
ngl.,
f af
o-rol,
o-n-
aJ.,
f as.
Down
F~s!51
~t fs11!2 (12)
where t f50.0159 seconds was chosen for a filter cut-off frquency of 10 Hz, well below the PWM switching frequency of 2Hz. It should be noted that this filter does not decrease the stity robustness of the system~since it is outside the closed loop!,and also does not adversely affect the closed-loop performaSpecifically, the presence of a sample-and-hold in the closed-makes it impossible to achieve a significant open-loop gainfrequencies near the PWM switching frequency, and as a rethe closed-loop response will always have a tracking bandwless than the switching frequency~and in practice, well below it!.Since the loop cannot track frequencies near or above the swing frequency, the input-shaping filter does not adversely afclosed-loop performance, but simply precludes frequenciesthe loop cannot track.
Figure 5 shows the measured step response of the systemures 6 and 7 show sinusoidal responses at 0.5 and 1.0 Hz, retively. Figure 8 shows a comparison of the predicted gain aphase characteristics of the closed-loop system to severalsured points. Good agreement is exhibited as the phase fallsindicating validation of the equivalent model formulation. Diagreement between predicted and measured phase at lowequencies~0.1 and 0.5 Hz! is attributed primarily to unmodeled
Fig. 7 Sinusoidal response at 1.0 Hz.
Fig. 8 Frequency response plots of the closed-loop system.The figure shows both the control design model prediction aswell as experimentally measured points overlayed.
508 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
e-6bil-
nce.oopatult,
dth
tch-ectthat
Fig-pec-ndea-off,-fre-
~Coulomb! friction effects. Apart from the well known fact thafrictional effects typically influence lower frequencies, further evdence of this attributed unmodeled effect is taken from the fthat the open-loop frequency response of Fig. 2 shows little inence of the equivalent model at frequencies of 0.1 and 0.5 Hzhigher frequencies, the effects of PWM switching as incorporainto the equivalent model dominate over frictional effects.
ConclusionsSolenoid-valve controlled pneumatic actuators without press
sensors can provide low-cost, high-power servo actuation. Susystem requires a control methodology that can accommodateswitching nature of solenoid valve control, and concomitanprovide for a prescribed degree of stability robustness to compsate for the loss of pressure measurements. This paper preseapproach that transforms a discontinuous switching model inlinear continuous equivalent model, so that loop-shaping methmay be utilized to incorporate a prescribed degree of stabrobustness into the system. The method is illustrated by wayexample on a single degree-of-freedom pneumatic system. Exmental demonstration of the approach indicates good moequivalence and good tracking performance. The method is geralizable to any linearizable PWM-controlled process.
References@1# Liu, S., and Bobrow, J. E., 1988, ‘‘An Analysis of a Pneumatic Servo Syst
and Its Application to a Computer-Controlled Robot,’’ ASME J. Dyn. SysMeas., Control,110~3!, pp. 228–235.
@2# Bobrow, J., and Jabbari, F., 1991, ‘‘Adaptive Pneumatic Force ActuationPosition Control,’’ ASME J. Dyn. Syst., Meas., Control,113~2!, pp. 267–272.
@3# Bobrow, J., and McDonell, B., 1998, ‘‘Modeling, Identification, and Controla Pneumatically Actuated, Force Controllable Robot,’’ IEEE Trans. Rob. Atom., 14~5!, pp. 732–742.
@4# Drakunov, S., Hanchin, G. D., Su, W. C., and Ozguner, U., 1997, ‘‘NonlinControl of a Rodless Pneumatic Servoactuator, or Sliding Modes versus Clomb Friction,’’ Automatica,33~7!, pp. 1401–1408.
@5# Kimura, T., Hara, S., Fujita, T., and Kagawa, T., 1997, ‘‘Feedback Linearition for Pneumatic Actuator Systems with Static Friction,’’ Control Eng. Pra5~10!, pp. 1385–1394.
@6# Jacobsen, S. C., Iversen E. K., Knutti, D. F., Johnson, R. T., and BiggersB., 1986, ‘‘Design of the Utah/MIT Dextrous Hand,’’IEEE International Con-ference on Robotics and Automation, pp. 1520–1532.
@7# Henri, P. D., Hollerbach, J. M., and Nahvi, A., 1998, ‘‘An Analytical anExperimental Investigation of a Jet Pipe Controlled Electropneumatic Actor,’’ IEEE Trans. Rob. Autom.,14~4!, pp. 601–611.
@8# Ben-Dov, D., and Salcudean, S. E., 1995, ‘‘A Force-Controlled PneumActuator,’’ IEEE Trans. Rob. Autom.,11~6!, pp. 906–911.
@9# Ye, N., Scavarda, S., Betemps, M., and Jutard, A., 1992, ‘‘Models of a Pnmatic PWM Solenoid Valve for Engineering Applications,’’ ASME J. DynSyst., Meas., Control,114~4!, pp. 680–688.
@10# Kunt, C., and Singh, R., 1990, ‘‘A Linear Time Varying Model for On-OValve Controlled Pneumatic Actuators,’’ ASME J. Dyn. Syst., Meas., Contr112~4!, pp. 740–747.
@11# Lai, J.-Y., Singh, R., and Menq, C.-H., 1992, ‘‘Development of PWM ModPosition Control for a Pneumatic Servo System,’’ J. Chinese Soc. Mech. E13~1!, pp. 86–95.
@12# Royston, T., and Singh, R., 1993, ‘‘Development of a Pulse-Width ModulaPneumatic Rotary Valve for Actuator Position Control,’’ ASME J. Dyn. SysMeas., Control,115~3!, pp. 495–505.
@13# Paul, A. K., Mishra, J. K., and Radke, M. G., 1994, ‘‘Reduced Order SlidiMode Control for Pneumatic Actuator,’’ IEEE Trans. Control Syst. Techno2~3!, pp. 271–276.
@14# Noritsugu, T., 1985, ‘‘Pulse-Width Modulated Feedback Force Control oPneumatically Powered Robot Hand,’’Proc. of International Symposium oFluid Control and Measurement, Tokyo, pp. 47–52.
@15# Noritsugu, T., 1986, ‘‘Development of PWM Mode Electro-Pneumatic Servmechanism. Part I: Speed Control of a Pneumatic Cylinder,’’ J. Fluid Cont17„1…, pp. 65–80.
@16# Noritsugu, T., 1986, ‘‘Development of PWM Mode Electro-Pneumatic Servmechanism. Part II: Position Control of a Pneumatic Cylinder,’’ J. Fluid Cotrol, 17~2!, pp. 7–31.
@17# Shih, M., and Hwang, C., 1997, ‘‘Fuzzy PWM Control of the Positions ofPneumatic Robot Cylinder Using High Speed Solenoid Valve,’’ JSME Int.40~3!, pp. 469–476.
@18# van Varseveld, R. B., and Bone, G. M., 1997, ‘‘Accurate Position Control oPneumatic Actuator Using On/Off Solenoid Valves,’’ IEEE/ASME TranMechatronics,2~3!, pp. 195–204.
@19# Mitchell, D. M., 1988,DC-DC Switching Regulator Analysis, McGraw-Hill,New York.
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

k
d
t
c
y
uid
5
s
ulto
c
onaletup
nalin
alvee
h-is-ure
fi-mat-
mst-bil-
fluidallratehtay toureting
T
0
Down
Hydraulic Flow Compensator for FastSwitching Devices
William de OjedaAdvanced Combustion and Controls, International Trucand Engine Corporation, 10400 W. North Ave,Melrose Park, IL 60160,Phone:~708! 865-4074,Fax: ~708! 865-4043e-mail: [email protected]
Francisco RuizProfessor of Mechanical and Aerospace Engineering,Illinois Institute of Technology, 10 W 32ndStreet, Chicago, IL 60616,Phone:~312! 567-3212e-mail: [email protected]
A hydraulic circuit design composed of a pressure-regulatingvice in conjunction with a spring-loaded flow compensatorshown to be an effective mechanism to improve the pressuretrol functionality, specifically by minimizing the excursionspressures experimented in the system and by minimizing therequired by the supply pump to restore pressure. The design sfluid energy and restores it to a system where fast switchingvices control fluid consumption. The effectiveness of the menism resides in controlling the back pressure on the pressure relator and compensator to just below the system pressure. Thecompensator can reduce pressure recovery times by over 60%minimize pressure drops by 20%. The compensator effectivellows for better pump size optimization and smaller required vumes for added power savings and better packaging.@DOI: 10.1115/1.1590680#
IntroductionIncreasing applications today in the area of hydraulics req
fast switching devices to shuttle large quantities of fluid at hpressures. These devices may be subject to large pressure anfluctuations. In the case of diesel fuel injection systems, laamounts of fuel are injected into the engine power cylindervery short time intervals. In the HEUI~hydraulic-electronic unitinjector! system, engine lube oil is pressurized, typically fromto 250 bars according to engine loading and speed, and usepressurize and inject diesel fuel during each power stroke@1#.Figure 1 shows the pressure trace in an oil accumulator usedrive the injectors on a V8 engine. Each pressure depresscorresponds to an injection event. Pressure is recovered aHEUI supply pump turns and pressurizes the accumulator at acorresponding to the unit’s displacement per revolution. Theeven timing is due to the uneven firing of the dual banks typicaa V8 @2#. The quality of the injection event depends greatly onability to recover the pressure before the following injectievent.
Compensators based on mass-spring systems, side branchnators and plate-shell elements attempt to reduce these flutions @3#. The highly dynamic nature set up by fast switchin
Contributed by the Dynamic Systems, Measurement, and Control Division ofHEAMERICAN SOCIETY OF MECHANICAL ENGINEERS for publication in the ASMEJOURNAL OF DYNAMIC SYSTEMS, MEASUREMENT, AND CONTROL. Manuscriptreceived by the ASME Dynamic Systems and Control Division September 11, 2final revision, March 15, 2003. Associate Editor: N. Manring.
Journal of Dynamic Systems, Measurement, and ControlCopyright © 2
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
e-iscon-oftimeoresde-ha-gu-flowandal-
ol-
iregh
flowrgein
0d to
d toions
theraten-of
hen
reso-tua-g
systems, like the one described above, make these traditicompensators ineffective because they are too slow or they sinstabilities in the hydraulic circuit.
Pressure characteristics in hydraulic systems with conventiothree-way, on/off, high-speed valves have been formulatedterms of mean pressure and ripple amplitudes according to vand system parameters@4,5#. Work has been done to optimize thcontrol strategies of the switching-off valves@6# and to improvethe valve designs@7#. In practice, even with the best valve tecnology and control systems available, optimizing the pump dplacement and system volumes is key to minimizing pressfluctuations and power requirements.
Fixed displacement pumps may incur significant flow inefciencies if the operation point deviates from that of maximufluid demand. Variable displacement pumps address this bytempting to match the input to output flow. Some mechanisinvolve de-activating plunger pistons@8#, varying the engagemenlength of pumping pistons@9#. According to the mechanism employed, efficiencies may vary. System volume determines the aity to schedule rapidly successive events that demand largeconsumption, both of which result in pressure drops. Too smvolumes may result in low system pressures and can deterioload control to the point of becoming unstable. It is in this ligthat the present compensating system is considered, as a wminimize the effect of fluid consumption on the system presssignature. Specifically, the combination of two pressure regula
02;
Fig. 1 Pressure in an oil accumulator
Fig. 2 Accumulator and pump pressures
SEPTEMBER 2003, Vol. 125 Õ 509003 by ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

510 Õ Vol
Downloaded 11 No
Fig. 3 Pressure control valve circuit
a
r
vTr
v
ai
n
s
lo
w
as
clos-ntsated
flowngto
80
iv-
urend
devices in conjunction with a spring-loaded compensator is pposed to minimize the system volume requirement.
System DescriptionThe compensating system considered in the present study r
on storing pressure vented from the main regulating circuitutilizing it during an event where a large flow of pressurized fluis required from the volume. The simulations documented hewere performed using the commercial packageEASY5, designed tomodel the transient and steady-state behavior of hydraumechanical systems. Transient thermal energy effects andtransfer were not considered here. SAE 10W oil at 80°C was uin the study.
Inertial Effects. Pipes used in the simulation are resistielements and account for transient fluid momentum effects.simulations considered the high-pressure pump and pressurelator to be in close proximity to the high-pressure volume. Teffect of the distance separating the control valves from theume is illustrated in Fig. 2.
Figure 2 shows pressures at the pump outlet and at the hpressure volume from the same data set of Fig. 1, where pumpcontrol valve are separated from the high-pressure volume byproximately 1 meter. The speed of sound~based on the bulkmodulus of elasticity and density! is estimated to be 1290 m/s fothe operating temperature. The time delay between the convalve and volume is thus estimated to be 0.8 msec. This estimcorrelates well with the phase-shift registered between the trin Fig. 2 of approximately 0.8–1 msec. For the present appltion, the line dimensions between the valve and volume shobe selected to limit the inertia effects to under 1 msec todeteriorate the performance of the device. The recommenlength of line between components for this application shouldexceed 1 meter.
Baseline Circuit. The system of Fig. 3 was simulated to etablish the baseline performance. Figure 3 shows a high-prescircuit with a pilot operated pressure regulator. A switching vaand power cylinder is used to illustrate the load and fluid csumption requirements.
Hydraulic components describing Fig. 3 are as follows. A lopressure circuit incorporates a low-pressure pump~1! to prime thehigh-pressure circuit, relief~2! and filter ~3!. A high-pressure cir-
. 125, SEPTEMBER 2003
v 2010 to 134.153.27.1. Redistribution subject to ASME lic
ro-
eliesndidein
lic/heatsed
ehe
egu-heol-
igh-andap-
rtrolateces
ca-uldot
dednot
-sureven-
-
cuit incorporates a high-pressure pump~4!, a system volume~5!, atwo position-three way valve~6!, a pressure control valve~PCV!composed of a main stage spool~8! whose area is representedthe variable orifice~9!, main stage fixed orifice~8a!, and a pilotsegment, represented as the spring loaded needle valve~10! set tocrack open at 60 bars. The PCV is described in Ref.@10#. The loadis simulated by a spring-loaded piston~7!; the area of the piston is2.3 cm2. Table 1 summarizes the system under consideration.
The system pressure corresponding to three opening anding valve events of the switching valve is shown in Fig. 4; evei and ii are separated by 15 ms, and events ii and iii are separby 30 ms. Figure 4a shows the fluid consumption (Qsystem) along-side the system and pilot pressures and the main stagethrough the PCV. Figure 4b shows the main stage area openiand main and pilot flows. Event i of Fig. 4 is considered nextdescribe a typical event.
At 0.09 sec the system pressure is stable at approximatelybars. The system is consuming little flow (Qsystem) amounting toleakage through the switching valve. The remaining flow delered by the pump is discharged through the PCV valve (Qpilot plusQmain). The pilot stage of the PCV regulates system press(Psystem) by a force balance between the pilot needle spring athe pressure forcePpilot acting on the needle. The opening ofApilot
Table 1 System parameters
Baselinecircuit
Compensatorcircuit
High pres pumpdispl ~cc/rev!
7 7
System vol~cc! 200 200Load switchingtime, open andclose~ms!
0.5 0.5
Load piston area(cm2)
2.3 2.3
PCV setting~bar! 60 60Compensatorpiston area (cm2)
n/a 1.0
Compensatorpreload~N!,stiffness~kg/mm!
n/a 250, 3.03
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

ang
o
s
l
e
es-otthe
hein-hethe30
emtiontheini-es-h asn-toa
oveThe
nure
h it
om-,the
bar;TheTheother
ar-
Down
allows a flow dischargeQpilot . Flow Qpilot generates a pressurdrop across the PCV main stage determined by the PCV mstage fixed orifice. The pressure drop will open the main stflow orifice when it overcomes the preload of main stage spriallowing a flow dischargeQmain. Therefore, the needle sprinforce setting controls pressure and furthermore controls the mstage opening which is able to control a much larger relief flrequirement. At 0.09 sec the PCV discharge flows is distribubetweenQmain at 4.66 lpm, andQpilot at 0.36 lpm.
At 0.10 sec the switching valve is commanded open. AQsystemof approximately 40 lpm is delivered to the load. As flow rushfrom the high-pressure volume to the load, pressurePsystemdrops.The pressure stops dropping when the switching valve is cloThe pilot needle reacts to the lowPsystemby closing, which resultsin interrupting theQpilot and therefore theQmain ~since no pressuredrop now is present across the main stage fixed orifice andmain stage spring acts to close the main stage areaAmain). Thepressure is recovered by a rate determined by the high-prespump displacement.
At 0.107 sec the system pressure is recovered and is at athat overcomes the pilot needle and results on aQpilot flow. At0.113 sec the flow is large enough to induce the main stagopen. At 0.115 sec the next event takes place, which again fothe pilot and main to close to interrupt the flow discharge ashuttle all pump flow to the load.
Fig. 4 PCV system response
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
eaingeg,
ainw
ted
es
ed.
the
sure
evel
torcesnd
The baseline circuit shows that during events i-iii, system prsure drops (DP) almost instantaneously, which forces the piland the main stages to close and rout all pump fluid intosystem volume. Each event recovers at the same rate (to). Forthis configuration 15 ms is the minimum required time for tpump to recover the initial system pressure level. The 30-msterval allows for the pressure regulator to stabilize further. If tload were sensitive to pressure at the moment of actuation,recovery time would require a dwell time between events ofms.
Figure 5 shows the effect of system volume on the systpressure and flow characteristics. The baseline configurashows a pressure drop of 40 bars, approximately 50% fromregulated target. Larger volumes are effective to reduce the mmum pressure. Volumes of 300 and 400 cc yield minimum prsures of 50 and 57 bars, respectively. Smaller volumes, suc100 cc, compromise the stability of the system. The fluid cosumption traces shown in Fig. 5 illustrate the effectivenesssustain more uniform fluid consumption with a larger volume—key characteristic for stable hydraulic systems. For all the abtraces the recovery time is the same, approximately 15 ms.pump displacement alone determines this recovery rate.
Compensating Circuit. The compensating circuit is show iFig. 6. The circuit consists of a second pilot-operated pressregulator~referred to here as a compensator relief to distinguisfrom the first PCV! with a main stage spool~11! and corres-ponding flow orifice~12!, a main stage fixed orifice~11a!, pilotstage~13!, spring-loaded compensator piston~14! with restrictor~15!, and a refill check valve~16!. The relief valve configurationof the compensator and the PCV above are identical. The cpensator piston area is 1 cm2, the spring stiffness is 3.03 kg/mmand the pre-load is set at 250 N. Under this arrangementeffective pressure range for the compensator is 25–120compression to the spring solid length occurs at 134 bars.restrictor is used to gain stability on the compensator piston.present arrangement demonstrates the concept, thoughcombinations are possible. Generally speaking, greater piston
Fig. 5 Effect of system volume in PCV circuit
SEPTEMBER 2003, Vol. 125 Õ 511
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

512 Õ
Downloaded 1
Fig. 6 Compensator control valve circuit
Fig. 7 Compensator circuit response
Vol. 125, SEPTEMBER 2003 Transactions of the ASME
1 Nov 2010 to 134.153.27.1. Redistribution subject to ASME license or copyright; see http://www.asme.org/terms/Terms_Use.cfm

n
he7
a-ofalvelvem-wn
he
ting
gu-
r
hehes of
on
40ost
eginsator,
y to
on-s tothere-
d. It
onesre-
ingini-e,line.inston
Down
eas potentially yield higher pressure-recovery rates but limiteffective pressure range of the compensator for the same spcharacteristics.
The role of the compensator circuit is to store pressure enein the spring loaded compensator piston using the relief flfrom the PCV main stage,Qmain-pcv, and deliver it to the systemduring and immediately following one fluid consumption eveThe design seeks to introduce an additional flow component~des-ignatedQrecovery in Fig. 6! to aid the pump in building systempressure.
Fig. 8 Compensator piston response
Journal of Dynamic Systems, Measurement, and Control
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
thering
rgyow
t.
ResultsThe compensator circuit performance is shown in Fig. 7. T
system volume utilized is the baseline volume, 200 cc. Figureashows the system pressure (Psystem) and flow consumption by theload (Qsystem) as well as total flow recovered from the compenstor circuit (Qrecovery). The amount of fluid recovered is the sumthe fluid reversed through the main stage poppet of the PCV v(Qmain-pcv) and the flow through the compensator check va(Qcheck). No flow is recovered through the main stage of the copensator relief valve. The latter three fluid flow traces are shoin Fig. 7b. Event i of Fig. 7 is considered next to describe toperation of the circuit.
As in the baseline circuit, the pressure for the compensacircuit at 0.09 sec is stable at 80 bars. System flow,Qsystem, re-flects leakage through the switching valve. The PCV valve relates system pressure; Fig. 7b shows the flow from the PCV mainstage,Qmain-pcv. Most of Qmain-pcv flows through the compensatorelief main stage flow orifice,Qmain-comp; the difference in thecurves is the flow through the compensator pilot relief stage. Tdynamics of the compensator piston are illustrated in Fig. 8. Tpiston motion is shown along side the pressures on both sidethe piston face. At 0.09 sec the compensator piston~14! is com-pressed to 1.8 cm, with a corresponding force of over 250 Nthe spring.
At 0.10 sec the switching valve is opened and approximatelylpm are delivered to the load. The system pressure drops. Alminstantaneous to the pressure drop, the compensator piston bto move as it draws flow into the system through the compensrelief check valve,Qcheck. This flow, which spans to 0.105 seccontributes to the pump supply into the system. SimultaneouslQcheck, the main stage PCV also flows into the system,Qmain-pcv~negative sign signifies flow into system!. At 0.105 the main stageof the compensator relief closes, and the PCV takes over to ctrol system pressure. The main stage of the PCV modulatecontrol pressure. Figure 8 shows the corresponding motion ofcompensating piston. The piston retracts to about 1.1 cm andcompresses to 1.6 cm by the time the second event is initiatefully recompresses to 1.8 cm at the time of the third event.
The performance of the compensating circuit in compariswith the baseline circuit is show in Fig. 9. The load consumapproximately 0.055 liters during one event. The compensatorstores 0.037 liters, of which 0.008 liters where delivered durthe load operation. The effect of the 0.008 liters only shows mmally in the flow curves; it is more visible in the pressure tracwhere the minimum pressure is about 12 bars over the baseThe effect of the total recovered flow however is quite visiblethe pressure recovery time. The action of the compensator pi
Fig. 9 System response with and without compensator
SEPTEMBER 2003, Vol. 125 Õ 513
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm

t
d
hu
gv
m
r
s
a
nt.tem
s
ionen 25
-
and
el
9.sa-of
ureve
licatic
aln.
es-
p-.,
Down
occurs at 0.4 ms after the load motion. The flow consumed byload event is 1.7 ms long. The compensator event is 3 ms loless than twice of the load’s.
The compensating circuit allows for faster recoveries. Forevents of Fig. 9, the baseline recovery time of 0.021 sec isproved to 0.009 sec, over a 50% improvement. The pressureis likewise improved. In addition to increased rate of flow presure recovery, a slight improvement is observed in Fig. 9 onability to sustain more uniform flow during the valve event. Tsignificance of faster recovery times is the ability to schedmore rapid response events. In practice successive events nebe delayed till the system pressure is recovered and under retion. The system studied here improves the inherent pressureability due to a rapid loss of pressure, and allows for more reliavalve operation and better control over the load.
SummaryA compensator device was examined for use in fast switch
hydraulic devices. The compensator hydraulic system was silated using a sample 2 position—3 way valve and spring-loarrangement, and compared to an equivalent circuit withoutcompensator. The characteristics of the system are as follows
• The compensator provides for system pressure recoveryover 50% faster than its counterpart circuits without a compentor as a response to a fast switching device and a large instaneous flow consumption.
• The amount of flow recovered by the compensator duringevent may be over half of that consumed by the load. Thesponse of the compensator may be less than 0.5 ms and caover several a millisecond period, depending of the duration ofevent.
• The system is stable. The use of a one-way restrictor isficient to dampen the system from the high instantaneous fldemand input.
• The functionality of the compensator is equivalent to increing the pump displacement—which would allow for higher pre
514 Õ Vol. 125, SEPTEMBER 2003
loaded 11 Nov 2010 to 134.153.27.1. Redistribution subject to ASME lic
theng,
heim-rops-theele
ed toula-ari-
ble
ingu-
adthe:
atessa-nta-
there-n actthe
uf-ow
s-s-
sure recovery rates—without the additional power requiremeSimilarly, the compensator would compensate for smaller sysvolumes—which would allow for better packaging in systemwhere sizing is a concern.
• The range of operation may be limited. For the configuratused herein, the system can span an operation range betweand 120 bars. Limitations will come from the sizing of the compensator piston and assembly constraints.
AcknowledgmentsThe authors appreciate the support of Melissa Skherich
Easy5 for their contributions to this study.
References@1# Glassey, S., Stockner, A., and Flinn, M., 1993, ‘‘HEUI-A new Direction Dies
Engine Fuel Systems,’’ SAE 930270.@2# Hower, M., Muller, R., Oehlerking, D., and Zielke, M., 1993, ‘‘The New
Navistar T444E Direct-Injection Turbocharged Diesel Engine,’’ SAE 93026@3# Mikota, J., 2000, ‘‘Comparison of Various Designs of Solid Body Compen
tors for the Filtering of Fluid Flow Pulsations in Hydraulic Systems,’’ Proc.the 1st FPNI-PhD Symposium, Hamburg, pp. 291–301.
@4# Jeong, H., and Kim, H., 2002, ‘‘Experimental Based Analysis of the PressControl Characteristics of an Oil Hydraulic Three-Way On/Off Solenoid ValControlled by PWM signal,’’ ASME J. Dyn. Syst., Meas., Control,124, pp.196–205.
@5# Tanaka, H., and Nobumoto, Y., 1999, ‘‘A High Pressure 2 Port Valve for CycPressure Test of a Diesel Fuel Pipe,’’ 4th Japan Hydraulic and PneumSociety, International Symposium on Fluid Power, Tokyo.
@6# Abbott, R., McLain, T., and Beard, R., 2001, ‘‘Application of an OptimControl Strategy to an Electro-Hydraulic Positioning System,’’ ASME J. DySyst., Meas., Control,123, pp. 377–384.
@7# Li, P., 2002, ‘‘Dynamic Redesign of a Flow Control Servovalve Using a Prsure Control Pilot,’’ ASME J. Dyn. Syst., Meas., Control,124, pp. 428–434.
@8# Isenburg, R., and Muzenmay, M., 1999,Diesel Engine Management, RobertBosch Gmbh, Stuttgart, pp. 256–291.
@9# Zhang, X., Cho, J., Nair, S., and Manring, N., 2001, ‘‘New Swash Plate Daming Model for Hydraulic Axial-Piston Pump,’’ ASME J. Dyn. Syst., MeasControl,123, pp. 463–470.
@10# Merrit, H., 1967,Hydraulic Control Systems, Wiley, New York, pp. 331–332.
Transactions of the ASME
ense or copyright; see http://www.asme.org/terms/Terms_Use.cfm
![PhysiologicalandBiochemicalResponsesto ...downloads.hindawi.com/journals/isrn/2012/318083.pdfUdayakumar et al. [24]. Briefly, biomass of plants was recorded at the beginning and at](https://img.pdfslide.us/doc/110x75/5f3db97f4451a3040d5e8dd5/physiologicalandbiochemicalresponsesto-udayakumar-et-al-24-brieiy-biomass.jpg)
![AlstonineasanAntipsychotic:EffectsonBrainAminesand ...The separations were performed using pH-zone-refining counter-current chromatography as previously described [17]. Briefly,](https://img.pdfslide.us/doc/110x75/60d950730dde9d1199357f10/alstonineasanantipsychoticeffectsonbrainaminesand-the-separations-were-performed.jpg)





![Resonant light scattering by small coated nonmagnetic ... · Exotic light scattering in a single sphere will arise for weakly dissipa-tive materials [13] or nondissipative anisotropic](https://img.pdfslide.us/doc/110x75/605b8294bef7507db62d2eda/resonant-light-scattering-by-small-coated-nonmagnetic-exotic-light-scattering.jpg)
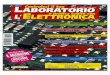









![On di usion driven oscillations in coupled dynamical systems · [Levinson, 1944; Coddington & Levinson 1955]. Since other versions of the dissipa-tivity concept are also in use both](https://img.pdfslide.us/doc/110x75/5e55dea47376531c354ac8e2/on-di-usion-driven-oscillations-in-coupled-dynamical-levinson-1944-coddington.jpg)










