Embed Size (px)
Citation preview

SYSTEMSYSTEMIDENTIFICATIONIDENTIFICATION
Ali KarimpourAssociate Professor
Ferdowsi University of Mashhad
Reference: “System Identification Theory For The User” Lennart Ljung

lecture 7
Ali Karimpour Jan 2014
2
Lecture 7
Parameter Estimation MethodsParameter Estimation MethodsTopics to be covered include: Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.

lecture 7
Ali Karimpour Jan 2014
3
Parameter Estimation MethodParameter Estimation Method
Topics to be covered include:
Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.

lecture 7
Ali Karimpour Jan 2014
4
Guiding Principles Behind Parameter Estimation Method
Parameter Estimation Method
MDMM |)(
)(),()(),()( teqHtuqGty
)(),(),()(),(1)|(ˆ:)( 11 tuqGqHtyqHtyM
Suppose that we have selected a certain model structure M. The set of models defined as:
For each θ , model represents a way of predicting future outputs. The predictor is a linear filter as:
Suppose the system is:

lecture 7
Ali Karimpour Jan 2014
5
Guiding Principles Behind Parameter Estimation Method
Suppose that we collect a set of data from system as:
)(,)(,...,)2(,)2(,)1(,)1( NuNyuyuyZ N
Formally we are going to find a map from the data ZN to the set DM
MNN DZ
Such a mapping is a parameter estimation method.

lecture 7
Ali Karimpour Jan 2014
6
Guiding Principles Behind Parameter Estimation Method
Evaluating the candidate modelLet us define the prediction error as:
)|(ˆ)(),( tytyt
When the data set ZN is known, these errors can be computed for t=1, 2 , … , N
A guiding principle for parameter estimation is:
Based on Zt we can compute the prediction error ε(t,θ). Select so that the
prediction error t=1, 2, … , N, becomes as small as possible.
N
,)ˆ,( Nt
?
We describetwo approaches
• Form a scalar-valued criterion function that measure the size of ε.
• Make uncorrelated with a given data sequence. )ˆ,( Nt

lecture 7
Ali Karimpour Jan 2014
7
Parameter Estimation MethodParameter Estimation Method
Topics to be covered include:
Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.

lecture 7
Ali Karimpour Jan 2014
8
Minimizing Prediction Error
Clearly the size of prediction error
)|(ˆ)(),( tytytis the same as ZN
Let to filter the prediction error by a stable linear filter L(q)
),()(),( tqLtF Then use the following norm
N
tF
NN tl
NZV
1),(1),(
Where l(.) is a scalar-valued positive function.
The estimate is then defined by:N
),(minarg)(ˆˆ NND
NNN ZVZ
M

lecture 7
Ali Karimpour Jan 2014
9
Minimizing Prediction Error
),()(),( tqLtF
N
tF
NN tl
NZV
1),(1),(
),(minarg)(ˆˆ NND
NNN ZVZ
M
Generally the term prediction error identification methods (PEM) is used for the family of this approaches.
Particular methods with specific names are used according
to:
• Choice of l(.)
• Choice of L(.)
• Choice of model structure
• Method by which the minimization is realized

lecture 7
Ali Karimpour Jan 2014
10
Minimizing Prediction Error
),()(),( tqLtF
N
tF
NN tl
NZV
1),(1),(
),(minarg)(ˆˆ NND
NNN ZVZ
M
Choice of LThe effect of L is best understood in a frequency-domain interpretation. Thus L acts like frequency weighting.
See also >> 14.4 Prefiltering
Exercise 7-1: Consider following system
)(),()(),()( teqHtuqGty Show that the effect of prefiltering by L is identical to changing the noise model from
),()(),( 1 qHqLqH

lecture 7
Ali Karimpour Jan 2014
11
Minimizing Prediction Error
),()(),( tqLtF
N
tF
NN tl
NZV
1),(1),(
),(minarg)(ˆˆ NND
NNN ZVZ
M
Choice of l
A standard choice, which is convenient both for computation and analysis.
2
21)( l
See also >> 15.2 Choice of norms: Robustness (against bad data)
One can also parameterize the norm independent of the model parameterization.

lecture 7
Ali Karimpour Jan 2014
12
Parameter Estimation MethodParameter Estimation Method
Topics to be covered include:
Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.

lecture 7
Ali Karimpour Jan 2014
13
Linear Regressions and the Least-Squares Method
)()()|(ˆ ttty T We introduce linear regressions before as:
φ is the regression vector and for the ARX structure it is Tba ntutuntytyt )(...)1()(...)1()(
μ(t) is a known data dependent vector. For simplicity let it zero in the reminder of this section.Least-squares criterion
)()(),( :iserror Prediction ttyt T
Now let L(q)=1 and l(ε)= ε2/2 then
211
)()(211),(1),( tty
Ntl
NZV T
N
t
N
tF
NN
This is Least-squares criterion for the linear regression

lecture 7
Ali Karimpour Jan 2014
14
Linear Regressions and the Least-Squares Method
Least-squares criterion
211
)()(211),(1),( tty
Ntl
NZV T
N
t
N
tF
NN
The least square estimate (LSE) is:
N
t
N
t
TNLSN tyt
Ntt
NZV
1
1
1)()(1)()(1),(minargˆ
)(NR )(Nf
)()(ˆ 1 NfNRLSN

lecture 7
Ali Karimpour Jan 2014
15
Linear Regressions and the Least-Squares Method
)()()( tetty T We introduce linear regressions before as:
2
11
2 )()(21
21),( ttyZV T
N
t
N
tt
N
N
Least-squares criterion
)()(21 NN
T
NN YY
N
T
NN
T
N
LS
N Y 1
N
t
N
t
TNLS
N tytttZV1
1
1)()()()(),(minargˆ
whiteis e(t) and regressors with duncorelate are components Noise
invertible is Suppose
N
T
NΦΦ
Under above assumptions the LSE is BLUE (Best linear unbiased estimator).

lecture 7
Ali Karimpour Jan 2014
16
Linear Regressions and the Least-Squares Method
)()()( tetty T We introduce linear regressions before as:Least-squares criterion
N
T
NN
T
N
LS
N Y 1
whiteis e(t) and regressors with duncorelate are components Noise
invertible is Suppose
N
T
NΦΦ
Under above assumptions the LSE is BLUE (Best linear unbiased estimator).
NTY meansLinear
}ˆE{ means Unbiased
covariance possible minimum}ˆcov{ meansBest

lecture 7
Ali Karimpour Jan 2014
17
Linear Regressions and the Least-Squares Method
eY NN We introduce linear regressions before as:
NTY meansLinear
}{}{ˆ TeTETYE}θE{ NN
If TN=I and T is uncorrelated with e then the estimator is unbiased.
Clearly LSE is unbiased.
Condition for linear unbiased estimation?
}θE{ ˆ

lecture 7
Ali Karimpour Jan 2014
18
Linear Regressions and the Least-Squares Method
eY NN We introduce linear regressions before as:
NTY meansLinear
})ˆ)(ˆ{(ˆcov TθθθθE}θ{
Condition for best linear unbiased estimation?
}))({( T
NN θTYθTYE
}))({( T
NN θTeθTθTeθTE
If the estimator is unbiased then TN=I so:
}))({(ˆcov TθTeθθTeθE}θ{ }{ TTTTeeE
If the estimator is unbiased then T is uncorrelated with e so:
}{)cov(}{ˆcov TTEeTE}θ{ TTT2 We must minimize it?

lecture 7
Ali Karimpour Jan 2014
19
Linear Regressions and the Least-Squares Method
ITT}θ{ T
T N
2 T subject toˆcovmin ..............................
T
NN
T
NT 1
N
T
NN
T
N
LS
N Y 1
Exercise 7-2: Show that the answer of above optimization is:
So LSE is BLUE since:
Exercise 7-3: Show that by LSE in linear regression one can find an unbiased estimate of cov{e} by
),ˆ(2ˆ 2 NLS
NNe ZVdN

lecture 7
Ali Karimpour Jan 2014
20
Linear Regressions and the Least-Squares Method
Weighted Least SquaresDifferent measurement could be assigned different weights
2
1
)()(1),(
N
t
Tt
NN tty
NZV
or
2
1
)()(),(),(
N
t
TNN ttytNZV
N
t
N
t
TLSN tyttNtttN
1
1
1)()(),()()(),(ˆ
The resulting estimate is the same as previous.

lecture 7
Ali Karimpour Jan 2014
21
Linear Regressions and the Least-Squares Method
Colored Equation-error Noise
if the disturbance v(t) is not white noise, then the LSE will not converge to the true value ai and bi .To deal with this problem, we may incorporate further modeling of the equation error v(t) as discussed in chapter 4, let us say
We show that in a difference equation
)()(...)1(
)(...)1()(
1
1
tvntubtub
ntyatyaty
bn
an
b
a
)()()( teqktv Now e(t) is white noise, but the new model take us out from LS environment, except in two cases:
• Known noise properties
• High-order models

lecture 7
Ali Karimpour Jan 2014
22
Linear Regressions and the Least-Squares Method
Colored Equation-error Noise • Known noise properties
)()(...)1(
)(...)1()(
1
1
tvntubtub
ntyatyaty
bn
an
b
a
Suppose the values of ai and bi are unknown, but k is a known filter (not too realistic a situation), so we have
)()()( teqktv
Filtering through k-1(q) gives
where
Since e(t) is white, the LS method can be applied without problems.
Notice that this is equivalent to applying the filter L(q)=k-1(q) .
)()()()()()( teqktuqBtyqA
)()()()()( tetuqBtyqA ff
)()()()()()( 11 tuqktutyqkty ff

lecture 7
Ali Karimpour Jan 2014
23
Linear Regressions and the Least-Squares Method
Colored Equation-error Noise
Now we can apply LS method. Note that nA=na+r, nB=nb+r
• High-order models
)()(...)1(
)(...)1()(
1
1
tvntubtub
ntyatyaty
bn
an
b
a
Suppose that the noise v can be well described by k(q)=1/D(q) where D(q) is a polynomial of order r. So we have
)()()( teqktv
)()(
1)()()()( teqD
tuqBtyqA
or
)()()()()()()( tetuqDqBtyqDqA
After deriving AD and BD one can easily derive A and B.
)()(
)()()()(
qAqB
qDqAqDqB

lecture 7
Ali Karimpour Jan 2014
24
Topics to be covered include:
Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.
Parameter Estimation MethodParameter Estimation Method

lecture 7
Ali Karimpour Jan 2014
25
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Estimation and the Principle of Maximum Likelihood
);(),...,,;( 21N
yN xfxxxf That is:
N
Ax
Ny
N dxxfAyPN
);()(
The area of statistical inference, deals with the problem of extracting informationfrom observations that themselves could be unreliable.
Suppose that observation yN=(y(1), y(2),…,y(N)) has following probability density function (PDF)
θ is a d-dimensional parameter vector. The propose of the observation is in fact to estimate the vector θ using yN.
dNN RRy )(
Suppose the observed value of yN is yN*, then
)(ˆˆ**Ny

lecture 7
Ali Karimpour Jan 2014
26
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Estimation and the Principle of Maximum LikelihooddNN RRy )(
Many such estimator functions are possible.
),( *N
y yf
A particular one >>>>>>>>> maximum likelihood estimator (MLE) .
),(maxarg)(ˆ**N
yN
ML yfy
The probability that the realization(=observation) indeed should take the value yN* is
proportional to
This is a deterministic function of θ once the numerical value yN* is inserted and it is
called Likelihood function.A reasonable estimator of θ could then be
where the maximization performed for fixed yN* . This function is known as the
maximum likelihood estimator (MLE).

lecture 7
Ali Karimpour Jan 2014
27
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Example 7-1: Let Niiy ,...,1,)(
Be independent random variables with normal distribution with unknown means θ0
and known variances λi ),()( 0 iNiy A common estimator is the sample mean:
N
i
NSM iy
Ny
1)(1)(
To calculate MLE, we start to determine the joint PDF for the observations. The PDF for y(i) is:
i
i
i
x
2)(exp
21 2
Joint PDF for the observations is: (since y(i) are independent)
N
i i
i
i
Ny
xxf1
2
2)(exp
21);(

lecture 7
Ali Karimpour Jan 2014
28
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Example 7-1: Let Niiy ,...,1,)(
Be independent random variables with normal distribution with unknown means θ0
and known variances λi
A common estimator is the sample mean:
N
i
NSM iy
Ny
1)(1)(
Joint PDF for the observations is: (since y(i) are independent)
N
i i
i
i
Ny
xxf1
2
2)(exp
21);(
So the likelihood function is:);( N
y yf
Maximizing likelihood function is the same as maximizing its logarithm. So);(logmaxarg)(ˆ N
yN
ML yfy
N
i ii
N
i
iyN1
2
1
)(21
212log
2maxarg
N
i iN
ii
NML
iyy1
1
)(
/1
1)(ˆ

lecture 7
Ali Karimpour Jan 2014
29
2 4 6 8 10-20
0
20
40
Different experimentsD
iffer
ent e
stim
ator
s
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
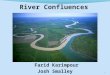
Example 7-1: Let Niiy ,...,1,)(
Be independent random variables with normal distribution with unknown means θ0
and known variances λi),()( 0 iNiy
Suppose N=15 and y(i) is derived from a random generation (normal distribution) such that the means is 10 but variances are:
10, 2, 3, 4, 61, 11, 0.1, 121, 10, 1, 6, 9, 11, 13, 15 The estimated means for 10 differentexperiments are shown in the figure:
N
i
NSM iy
Ny
1)(1)(
N
i iN
ii
NML
iyy1
1
)(
/1
1)(ˆ
)(ˆ NSM y
)(ˆ NML y
Exercise 6-4:Do the same procedure for another experiments and draw the corresponding figure.
Exercise 6-5:Do the same procedure for another experiments and draw the corresponding figure. Suppose all variances as 10.

lecture 7
Ali Karimpour Jan 2014
30
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Relationship to the Maximum A Posteriori (MAP) Estimate
Maximum likelihood estimator (MLE)
),(maxarg)(ˆ**N
yN
ML yfy
The Bayesian approach is used to derive another parameter estimation problem.
In the Bayesian approach the parameter itself is thought of as a random variable.
Let the prior PDF for θ is:)()( zPzg
The Maximum A Posteriori (MAP) estimate is:
)().,(maxarg)(ˆ gyfy N
yN
MAP
)();()|( gyfyP Ny
N After some manipulation

lecture 7
Ali Karimpour Jan 2014
31
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Cramer-Rao Inequality
TNN yyEP 00 )(ˆ)(ˆ}ˆcov{
The quality of an estimator can be assessed by its mean-square error matrix:
True value of θWe may be interested in selecting estimators that make P small. Cramer-Rao inequality give a lower bound for P
M is Fisher Information
matrix
0)(ˆ NyE
100 )(ˆ)(ˆ MyyEPTNN
Let
Then
An estimator is efficient if P=M-1
Exercise 7-6:Proof Cramer-Rao inequality.

lecture 7
Ali Karimpour Jan 2014
32
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Asymptotic Properties of the MLE
TNN yyEP 00 )(ˆ)(ˆ Calculation of Is not an easy task.
Therefore, limiting properties as the sample size tends to infinity are calculated instead.
For the MLE in case of independent observations, Wald and Cramer obtain
Suppose that the random variable {y(i)} are independent and identically distributed, so that
N
iiiyNy xfxxxf
1)(21 );(),...,,;(
Suppose also that the distribution of yN is given by fy(θ0 ;xN) for some value θ0. Then tends to θ0 with probability 1 as N tends to infinity, and )(ˆ N
ML y
0)(ˆ NML yN
converges in distribution to the normal distribution with zero mean covariance matrix given by Cramer-Rao lower bound M-1.

lecture 7
Ali Karimpour Jan 2014
33
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Likelihood function for Probabilistic Models of Dynamical Systems
)|(ˆ)(),();,()|(ˆ:)( 1
tytyt
ZtgtyM t
Suppose
);,(PDF thehave andt independen is
txfe
Recall this kind of model a complete probabilistic model.
We note that, the output is:);,( PDF thehas ),( where),()|(ˆ)( txftttyty e
Now we must determine the likelihood function);( N
y yf
Probabilistic Models of Dynamical Systems

lecture 7
Ali Karimpour Jan 2014
34
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
?);( Ny yf
Lemma: Suppose ut is given as a deterministic sequence, and assume that the generation of yt is described by the model
),( is )( of PDF lconditiona the where)(),()( 1 txfttZtgty et
Then the joint probability density function for yt , given ut is:
)(),,()()|,( 1
1 IkZkgkyfuytft
k
ke
ttm
Proof: CPDF of y(t), given Zt-1 , is tZtgxfZxp tte
tt ),,()|( 11
Using Bayes’s rule, the joint CPDF of y(t) and y(t-1), given Zt-2 can be expressed as:
1),,1(.),,( 21
1
tZtgxftZtgxf tte
tte
)|().,)1(|()|,( 21
21
21
t
tt
ttt
tt ZxpZxtyxpZxxp
Similarly we derive (I)

lecture 7
Ali Karimpour Jan 2014
35
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
)|(ˆ)(),();,()|(ˆ:)( 1
tytyt
ZtgtyM t
Suppose
);,(PDF thehave andt independen is
txfe
Now we must determine the likelihood function
Probabilistic Models of Dynamical Systems
By previous lemma
N
t
te
Ny tZtgtyfyf
1
1 ;),;,()();(
N
te ttf
1
;),,(
Maximizing this function is the same as maximizing
N
te
Ny ttf
Nyf
1
;),,(log1);(logN1
If we define
);,(log),,( tftl e

lecture 7
Ali Karimpour Jan 2014
36
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method
Probabilistic Models of Dynamical SystemsMaximizing this function is the same as maximizing
N
te
Ny ttf
Nyf
1;),,(log1);(log
N1
If we define);,(log),,( tftl e
We may write
N
t
NML ttl
Ny
1);),,((1minarg)(ˆ
The ML method can thus be seen as a special case of the PEM.
Exercise 7-7 Find the Fisher information matrix for this system.
Exercise 7-8: Derive a lower bound for .ˆNCov

lecture 7
Ali Karimpour Jan 2014
37
Topics to be covered include:
Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.
Parameter Estimation MethodParameter Estimation Method

lecture 7
Ali Karimpour Jan 2014
38
Correlation Prediction Errors with Past Data
0),()(11
N
ttt
N
Ideally, the prediction error ε(t,θ) for good model should be independent of the past data Zt-1
If ε(t,θ) is correlated with Zt-1 then there was more information available in Zt-1
about y(t) than picked up by )|(ˆ ty
To test if ε(t,θ) is independent of the data set Zt-1we must check
This is of course not feasible in practice.
Uncorrelated withAll transformation of ε(t,θ)
All possible function of Zt-1
Instead, we may select a certain finite-dimensional vector sequence {ζ(t)} derived from Zt-1 and a certain transformation of {ε(t,θ)} to be uncorrelated with this sequence. This would give
Derived θ would be the best estimate based on the observed data.

lecture 7
Ali Karimpour Jan 2014
39
Correlation Prediction Errors with Past Data
),()(),( tqLtF
Choose a linear filter L(q) and let
Choose a sequence of correlation vectors
),,(),( 1 tZtt
Choose a function α(ε) and define
N
tF
NN tt
NZf
1),(),(1),(
Then calculate
0),(ˆ
NNDN Zfsol
M
Instrumental variable method (next section) is the best known representative of this family.

lecture 7
Ali Karimpour Jan 2014
40
Correlation Prediction Errors with Past Data
0),(ˆ
NNDN Zfsol
M
N
tF
NN tt
NZf
1),(),(1),(
Normally, the dimension of ξ would be chosen so that fN is a d-dimensional vector.
Then there is many equations as unknowns. Sometimes one use ξ with higher dimension than d so there is an over determined set of equations, typically without solution. so
),(minargˆ NNDN Zf
M
Exercise 7-9: Show that the prediction-error estimate obtained from
),(minarg)(ˆˆ NND
NNN ZVZ
M
can be also seen as a correlation estimate for a particular choice of L, ζ and α.

lecture 7
Ali Karimpour Jan 2014
41
Correlation Prediction Errors with Past Data
),()|(ˆ tty T
Pseudolinear Regressions
We saw in chapter 4 that a number of common prediction models could be written as:
Pseudo-regression vector φ(t,θ) contains relevant past data, it is reasonable to require the resulting prediction errors be uncorrelated with φ(t,θ) so:
)(),(),( tt
N
t
TPLRN ttyt
Nsol
1
0),()(),(1ˆ
Which we term the PLR estimate. Pseudo linear regressions estimate.

lecture 7
Ali Karimpour Jan 2014
42
Topics to be covered include:
Guiding Principles Behind Parameter Estimation Method.
Minimizing Prediction Error.
Linear Regressions and the Least-Squares Method.
A Statistical Framework for Parameter Estimation and the Maximum Likelihood Method.
Correlation Prediction Errors with Past Data.
Instrumental Variable Methods.
Parameter Estimation MethodParameter Estimation Method

lecture 7
Ali Karimpour Jan 2014
43
Instrumental Variable Methods
)()|(ˆ tty T
Consider linear regression as:
The least-square estimate of θ is given by
N
t
TLSN ttyt
Nsol
1
0)()()(1ˆ
So it is a kind of PEM with L(q)=1 and ξ(t,θ)=φ(t)
Now suppose that the data actually described by
)()()( 00 tvtty T
We found in section 7.3 that LSE will not tend to θ0 in typical cases.N

lecture 7
Ali Karimpour Jan 2014
44
Instrumental Variable Methods
N
t
TLSN ttyt
Nsol
1
0)()()(1ˆ )()()( 00 tvtty T
We found in section 7.3 that LSE will not tend to θ0 in typical cases.N
N
t
TIVN ttyt
Nsol
1
0)()()(1ˆ
Such an application to a linear regression is called instrumental-variable method.
The elements of ξ are then called instruments or instrumental variables.
Estimated θ is:
)()(1)()(1ˆ1
1
1
tytN
ttN
N
t
N
t
TIVN

lecture 7
Ali Karimpour Jan 2014
45
Instrumental Variable Methods
N
t
TLSN ttyt
Nsol
10)()()(1ˆ
?method IVin asˆ Does 0 NN
Exercise 7-10: Show that will be exist and tend to θ0 if following equations exists.
IVN
0)()(rnonsingula be)()(
0 tvtξEttE T
We found in section 7.3 that LSE will not tend to θ0 in typical cases.N
N
t
TIVN ttyt
Nsol
10)()()(1ˆ )()(1)()(1ˆ
1
1
1tyt
Ntt
N
N
t
N
t
TIVN

lecture 7
Ali Karimpour Jan 2014
46
Instrumental Variable Methods
So we need
(II) 0)()((I)r nonsingula be)()(
0 tvtξEttE T
)()(...)1()(...)1()( 11 tvntubtubntyatyaty bnan ba
Consider an ARX model
A natural idea is to generate the instruments so as to secure (II) but also consider (I)
)(...)1()(...)1()()( ba ntutuntxtxqKt
Where K is a linear filter and x(t) is generated through a linear system
)()()()( tuqMtxqN
Most instruments used in practice are generated in this way.
(II) and (I) are satisfied. Why?