Embed Size (px)
Citation preview

Journal of the Franklin Institute 347 (2010) 1266–1280
0016-0032/$3
doi:10.1016/j
$This wor
Wong Magna�CorrespoE-mail ad
www.elsevier.com/locate/jfranklin
Synchronization of stochastic perturbed chaoticneural networks with mixed delays$
Xiaodi Lia,�, Changming Dinga, Quanxin Zhub
aSchool of Mathematical Sciences, Xiamen University, Xiamen 361005, Fujian, PR ChinabDepartment of Mathematics, Ningbo University, Ningbo 315211, Zhejiang, PR China
Received 25 October 2009; received in revised form 8 May 2010; accepted 1 June 2010
Abstract
In this paper, we study the synchronization problem of a class of chaotic neural networks with
time-varying delays and unbounded distributed delays under stochastic perturbations. By using
Lyapunov–Krasovskii functional, drive-response concept, output coupling with delay feedback and
linear matrix inequality (LMI) approach, we obtain some sufficient conditions in terms of LMIs
ensuring the exponential synchronization of the addressed neural networks. The feedback controllers
can be easily obtained by solving the derived LMIs. Moreover, the main results are generalizations of
some recent results reported in the literature. A numerical example is also provided to demonstrate
the effectiveness and applicability of the obtained results.
& 2010 The Franklin Institute. Published by Elsevier Ltd. All rights reserved.
1. Introduction
In 1990, Aihara [1] firstly introduced chaotic neural network models to simulate thechaotic behavior of biological neurons. Consequently, chaotic neural networks have drawnconsiderable attention and have been successfully applied in combinational optimization,secure communication, information science, and so on [2–4]. Recently, the synchronizationof chaotic neural networks has been intensively investigated due to their potentialapplication in secure communication, parallel recognition, etc. [5–7]. It is especially worth
2.00 & 2010 The Franklin Institute. Published by Elsevier Ltd. All rights reserved.
.jfranklin.2010.06.001
k was jointly supported by the National Natural Science Foundation of China (10801056) and K.C.
Fund in Ningbo University.
nding author.
dress: [email protected] (X. Li).

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1267
noting that delayed neural networks such as delayed Hopfield neural networks and delayedcellular neural networks can exist some complicated dynamics and even chaotic behaviorsif the networks’ parameters and time delays are appropriately chosen [8,9], in addition tothe stability and periodic oscillations considered previously in [10–18]. Hence, thesynchronization issue of chaotic neural networks with time delays has drawn particularresearch interests and many interesting synchronization schemes have been obtained viadifferent approaches, see [19–26] and the references therein.
On the other hand, stochastic phenomenon usually appears in the electrical circuit design ofneural networks, a neural network could be stabilized or destabilized by certain stochastic inputs[27,28]. Therefore, it is significant and of prime importance to consider stochastic effects to thechaos synchronization of neural networks with delays. To date, many researchers have studiedthe synchronization problem for delayed neural networks with environmental noise and a greatnumber of results on this topic have been reported in the literature [29–38,43,44]. For instance,Sun and Cao [29,30] investigated the global asymptotical synchronization and exponentialsynchronization for stochastic perturbed chaotic neural networks with constant delays viaadaptive feedback control techniques and Halanay inequalities for stochastic differentialequations. In [33–35], the authors studied the synchronization problem of stochastic perturbedneural networks with time-varying delays via different approaches. In [36], Tang et al. consideredthe lag synchronization of stochastic perturbed chaotic neural networks with both the discrete
delays and bounded distributed delays via adaptive feedback technique. However, thesesynchronization results in [29–36] cannot be applied to stochastic perturbed chaotic neuralnetworks with unbounded distributed delays. Very recently, Liu et al. [37] investigated the pthmoment exponential synchronization of a class of stochastic perturbed chaotic neural networkswith time-varying delays and unbounded distributed delays by establishing two new integro-differential inequalities. However, the obtained results in [37] are highly dependent on thedimensions n. In other words, these results cannot be applied to stochastic network models withhigh-dimensions. In fact, in real applications there exist many neural network models with high-dimensions which have their unique advantages in computing technology, solving linear andnonlinear algebraic equations, especially in solving some difficult optimization problems [39,40].In addition, the obtained results in [37] are not expressed in terms of LMIs, which make themchecked inconveniently by the developed algorithms.
Motivated by the above discussions, in this paper, we consider a class of stochasticperturbed chaotic neural networks with time-varying delays and unbounded distributed
delays. The main purpose of this paper is to study the exponential synchronization for theaddressed chaotic neural networks under stochastic perturbations. To the best of theauthors’ knowledge, there are few studies on the synchronization issue in terms of LMIsfor stochastic perturbed chaotic neural networks with time-varying delays and unboundeddistributed delays. By using Lyapunov–Krasovskii functional, drive-response concept,output coupling with delay feedback and linear matrix inequality (LMI) approach, weobtain the synchronization schemes in terms of LMIs, which can be easily calculated byMATLAB LMI toolbox [38]. We also provide a numerical example to demonstrate theeffectiveness and applicability of the proposed synchronization schemes.
2. Notations and preliminaries
Notations: Let R denotes the set of real numbers, Zþ denotes the set of positive integers, Rn
and Rn�m denote the n-dimensional and n�m�dimensional real spaces equipped with the

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801268
Euclidean norm j�j, respectively. Eð�Þ stands for the mathematical expectation of a stochasticprocess. jj�jj denotes a vector or a matrix norm. A40 or Ao0 denotes that the matrix A is asymmetric and positive definite or negative definite matrix. The notation AT and A�1 meanthe transpose of A and the inverse of a square matrix. If A;B are symmetric matrices, A4Bmeans that A�B is positive definite matrix. C denotes the set of real-valued boundedcontinuous function defined on ð�1; 0�. oðtÞ ¼ ðo1ðtÞ; . . . ;omðtÞÞ
T is an m-dimensionalBrownian motion defined on a complete probability space ðO;F ;PÞ with a natural filtrationfF tgtZ0 generated by foðsÞ : 0rsrtg, where we associate O with the canonical spacegenerated by oðtÞ, and denote by F the associated s�algebra generated by oðtÞ with theprobability measure P. C2
F 06C2
F 0ðð�1; 0�;RnÞ denotes the family of all bounded
F 0�measurable, Cðð-1; 0�;RnÞ�valued random variables c, satisfying supsr0EjcðsÞj2o1.I denotes the identity matrix with appropriate dimensions and L ¼ f1; 2; . . . ; ng. In addition,the notation % always denotes the symmetric block in one symmetric matrix.In this paper, we consider a class of neural networks represented by the compact form as
follows:
dxðtÞ ¼ ½�CxðtÞ þ Af ðxðtÞÞ þ Bf ðxðt�tðtÞÞÞ þWR t
�1hðt�sÞf ðxðsÞÞ dsþ J� dt; t40;
xðsÞ ¼ jðsÞ; s 2 ð�1; 0�;
(
ð1Þ
where the initial value function jð�Þ 2 C; nZ2 corresponds to the number of neurons in thenetworks; x(t)=(x1(t),y,xn(t))
T is the neuron state vector of the neural network;C=diag(c1,y,cn) is a diagonal matrix with ci40; i ¼ 1; . . . ; n; A, B, W are the connectionweight matrix, the delayed weight matrix and the distributively delayed connection weightmatrix, respectively; J is the external input; tðtÞ is the transmission delay with 0rtðtÞrtand _tðtÞrr, t; r are two real constants; f ðxð�ÞÞ ¼ ðf1ðx1ð�ÞÞ; . . . ; fnðxnð�ÞÞÞ
T represents theneuron activation function and hð�Þ ¼ diagðh1ð�Þ; . . . ; hnð�ÞÞ is the delay kernel function.Based on the drive-response concept for synchronization of coupled chaotic systems, we
construct the response system as follows:
dyðtÞ ¼ �CyðtÞ þ Af ðyðtÞÞ þ Bf ðyðt�tðtÞÞÞ þWR t
�1hðt�sÞf ðyðsÞÞ dsþ J þ uðtÞ
� �dt
þ sðt; eðtÞ; eðt�tðtÞÞÞ doðtÞ; t40;
yðsÞ ¼ cðsÞ; s 2 ð�1; 0�;
8><>:
ð2Þ
where the initial value function cð�Þ 2 C2F 0; sð�Þ : Rþ � Rn � Rn-Rn�m is the noise
intensity matrix; u(t) is the controller. Define the synchronization error as e(t)=y(t)�x(t)and the control input in the response system (2) is designed as follows:
uðtÞ ¼ K1½f ðyðtÞÞ�f ðxðtÞÞ� þ K2½f ðyðt�tðtÞÞÞ�f ðxðt�tðtÞÞÞ�; ð3Þ
where K1, K2 are the gain matrices to be scheduled. With the above control law, the errordynamics between system (1) and (2) can be expressed by
deðtÞ ¼ �CeðtÞ þ A%gðeðtÞÞ þ B%gðeðt�tðtÞÞÞ þWR t
�1hðt�sÞgðeðsÞÞ ds
� �dt
þ sðt; eðtÞ; eðt�tðtÞÞÞ doðtÞ; t40;
eðsÞ ¼ cðsÞ�jðsÞ; s 2 ð�1; 0�;
8><>: ð4Þ
where A% ¼ Aþ K1, B% ¼ Bþ K2, gðeð�ÞÞ ¼ f ðeð�Þ þ xð�ÞÞ�f ðxð�ÞÞ.

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1269
Remark 2.1. In many applications, we are interested in designing the state-feedbackcontroller or time-delay feedback controller as u(t)=K1e(t) or uðtÞ ¼ K1eðtÞ þ K2eðt�tðtÞÞ.However, in many real networks only output signals can be measured. Hence, it isnecessary to consider the controller (3) in the response system. We refer to this as outputcoupling with delay feedback.
Let C1;2ðRþ � Rn-RþÞ denote the family of all nonnegative functions V(t,x) on Rþ �
Rn which are continuous once differentiable in t and twice differentiable in x. For eachsuch V, we define an operator LV associated with Eq. (4) as
LV ¼ Vtðt; eðtÞÞ þ Veðt; eðtÞÞ �CeðtÞ þ A%gðeðtÞÞ þ B%gðeðt�tðtÞÞÞ�
þW
Z t
�1
hðt�sÞgðeðsÞÞ ds
�þ
1
2trace ½sT Veeðt; eðtÞÞs�;
where
Vtðt; eðtÞÞ ¼@V ðt; eðtÞÞ
@t; Veðt; eðtÞÞ ¼
@V ðt; eðtÞÞ
@e1; . . . ;
@V ðt; eðtÞÞ
@en
� �1�n
;
Veeðt; eðtÞÞ ¼@2V ðt; eðtÞÞ
@eiej
� �n�n
:
Furthermore, we make the following assumptions in this paper.(H1) The neuron activation functions fjð�Þ; j 2 L, are bounded and satisfy:
d�j rfjðuÞ�fjðvÞ
u�vrdþj ; j 2 L
for any u; v 2 R, uav, where d�j ; dþj ; j 2 L are some real constants.
(H2) The delay kernels hj ; j 2 L, are some real value non-negative continuous functionsdefined in ½0;1Þ and satisfyZ 1
0
hjðsÞ ds ¼ 1;
Z 10
hjðsÞeZs ds6h%
j o1; j 2 L
in which Z;h%
j are some positive constants.(H3) The diffusion matrix sð�Þ is local Lipschitz continuous and satisfies the linear
growth condition as well. Moreover, there exist two constant n� n matrices G140;G240such that
trace½sT ðt; u; vÞsðt; u; vÞ�ruTG1uþ vTG2v
for all u; v 2 Rn.
Remark 2.2. It should be noted that as pointed out in [25,26,41,42], the constantsd�j ; d
þj ; j 2 L in assumption (H1) are allowed to be positive, negative or zero. Then, those
previously used Lipschitz conditions (e.g., [22–24] ) are just the special cases of assumption(H1).

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801270
In addition, the following definitions are needed:
S1 ¼ diagðd�1 dþ1 ; . . . ; d
�n dþn Þ; S2 ¼ diag
d�1 þ dþ12
; . . . ;d�n þ dþn
2
� �:
Definition 2.1. Systems (1) and (2) are said to be exponentially synchronized if there existconstants l40 andM40 such that EjjeðtÞjj2rMEjjc�jjj2we�lt, t40, where l is called theconvergence rate (or degree) of exponential synchronization.
3. Main results
In the section, we will design the desirable schemes for controller feedback gain matricesK1, K2, which guarantee the exponential synchronization between the drive system (1) andthe response one (2).
Theorem 3.1. Assume that assumptions (H1)–(H3) hold. Then systems (1) and (2) are
exponentially synchronized if there exist two constants a 2 ð0; ZÞ;b40, two n� n matrices
Q140;Q240 and four n� n diagonal matrices P40;Q340;U140;U240, such that PrbI
and
C11 0 C13 PBþ PK2 PW
% C22 0 U2S2 0
% % C33 0 0
% % % C44 0
% % % % �Q3
0BBBBBB@
1CCCCCCAo0; ð5Þ
where C11 ¼ aP�PC�CPþQ1 þ bG1�U1S1, C13 ¼ PAþ PK1 þU1S2, C22 ¼ bG2�
ð1�rÞe�atQ1�U2S1, C33 ¼ Q2 þQ3H�U1, C44 ¼ �ð1�rÞe�atQ2�U2, H ¼ diagðh%
1 ;. . . ;h%
n Þ.
Proof. For the error system (4), we define the following Lyapunov–Krasovskii functional:
V ðt; eðtÞÞ ¼ V1ðt; eðtÞÞ þ V2ðt; eðtÞÞ þ V3ðt; eðtÞÞ þ V4ðt; eðtÞÞ;
where
V1ðt; eðtÞÞ ¼ eateT ðtÞPeðtÞ;
V2ðt; eðtÞÞ ¼
Z t
t�tðtÞeaseT ðsÞQ1eðsÞ ds;
V3ðt; eðtÞÞ ¼
Z t
t�tðtÞeasgT ðeðsÞÞQ2gðeðsÞÞ ds;
V4ðt; eðtÞÞ ¼Xn
j¼1
qð3Þj
Z 10
hjðuÞ
Z t
t�u
eaðsþuÞg2j ðejðsÞÞ ds du; Q36diagðq
ð3Þ1 ; q
ð3Þ2 ; . . . ; q
ð3Þn Þ:

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1271
By the Ito’s formula, we can calculate LV1;LV2;LV3 and LV4 along the trajectories of thesystem (4). Then we have
LV1ðt; eðtÞÞ
¼ aeateT ðtÞPeðtÞ þ 2eateT ðtÞP_eðtÞ
¼ aeateT ðtÞPeðtÞ þ 2eateT ðtÞP �CeðtÞ þ A%gðeðtÞÞ þ B%gðeðt�tðtÞÞÞ�
þW
Z t
�1
hðt�sÞgðeðsÞÞ ds
�þ eattrace½sT Ps�
reat eT ðtÞ½aP�2PC þ lmaxðPÞG1�eðtÞ þ 2eT ðtÞPA%gðeðtÞÞ�þ2eT ðtÞPB%gðeðt�tðtÞÞÞ þ 2eT ðtÞPW
Z t
�1
hðt�sÞgðeðsÞÞ ds
þlmaxðPÞeT ðt�tðtÞÞG2eðt�tðtÞÞ
reat eT ðtÞ½aP�2PC þ bG1�eðtÞ þ 2eT ðtÞPA%gðeðtÞÞ
�þ2eT ðtÞPB%gðeðt�tðtÞÞÞ þ 2eT ðtÞPW
Z t
�1
hðt�sÞgðeðsÞÞ ds
þbeT ðt�tðtÞÞG2eðt�tðtÞÞ
ð6Þ
LV2ðt; eðtÞÞ ¼ eateT ðtÞQ1eðtÞ�eaðt�tðtÞÞeT ðt�tðtÞÞQ1eðt�tðtÞÞð1�_tðtÞÞreatfeT ðtÞQ1eðtÞ�e�ateT ðt�tðtÞÞQ1eðt�tðtÞÞð1�rÞg ð7Þ
LV3ðt; eðtÞÞ ¼ eatgT ðeðtÞÞQ2gT ðeðtÞÞ�eaðt�tðtÞÞgT ðeðt�tðtÞÞÞQ2gðeðt�tðtÞÞÞð1�_tðtÞÞreatfgT ðeðtÞÞQ2gðeðtÞÞ�e�atgT ðeðt�tðtÞÞÞQ2gðeðt�tðtÞÞÞð1�rÞg: ð8Þ
By the well-known Cauchy–Schwarz inequality and assumption (H2), we also have
LV4ðt; eðtÞÞ ¼Xn
j¼1
qð3Þj
Z 10
hjðuÞeaðtþuÞg2
j ðejðtÞÞ du�Xn
j¼1
qð3Þj
Z10
hjðuÞeatg2
j ðejðt�uÞÞ du
reat gT ðeðtÞÞQ3HgðeðtÞÞ�Xn
j¼1
qð3Þj
Z 10
hjðuÞ du
Z 10
hjðuÞg2j ðejðt�uÞÞ du
( )
reat gT ðeðtÞÞQ3HgðeðtÞÞ�Xn
j¼1
qð3Þj
Z 10
hjðuÞgjðejðt�uÞÞ du
� �2( )
¼ eat gT ðeðtÞÞQ3HgðeðtÞÞ�
Z t
�1
hðt�sÞgðeðsÞÞ ds
� �T
Q3
Z t
�1
hðt�sÞgðeðsÞÞ ds
� �( ):
ð9Þ
In addition, according to [19], for any n� n diagonal matrices U140;U240, it follows that
eateðtÞ
gðeðtÞÞ
!T�U1S1 U1S2
% �U1
!eðtÞ
gðeðtÞÞ
!8<:þ
eðt�tðtÞÞ
gðeðt�tðtÞÞÞ
!T�U2S1 U2S2
% �U2
!�
eðt�tðtÞÞ
gðeðt�tðtÞÞÞ
!9=;Z0: ð10Þ

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801272
Therefore, combining Eqs. (6)–(10) we obtain
e�atLVreT ðtÞ½aP�PC�CPþQ1 þ bG1�eðtÞ þ 2eT ðtÞPA%gðeðtÞÞ
þ2eT ðtÞPB%gðeðt�tðtÞÞÞ þ 2eT ðtÞPW
Z t
�1
hðt�sÞgðeðsÞÞ ds
þeT ðt�tðtÞÞ½bG2�ð1�rÞe�atQ1�eðt�tðtÞÞþgT ðeðtÞÞ½Q2 þQ3H�gðeðtÞÞ�ð1�rÞe�atgT ðeðt�tðtÞÞÞQ2gðeðt�tðtÞÞÞ
�
Z t
�1
hðt�sÞgðeðsÞÞ ds
� �T
Q3
Z t
�1
hðt�sÞgðeðsÞÞ ds
� �
þeðtÞ
gðeðtÞÞ
!T�U1S1 U1S2
% �U1
!eðtÞ
gðeðtÞÞ
!
þeðt�tðtÞÞ
gðeðt�tðtÞÞÞ
!T
��U2S1 U2S2
% �U2
!eðt�tðtÞÞ
gðeðt�tðtÞÞÞ
!
rxTðtÞCxðtÞ;
where
C ¼
C11 0 PA% þU1S2 PB% PW
% C22 0 U2S2 0
% % C33 0 0
% % % C44 0
% % % % �Q3
0BBBBBB@
1CCCCCCA;
xðtÞ ¼ eðtÞ; eðt�tðtÞÞ; gðeðtÞÞ; gðeðt�tðtÞÞÞ;Z t
�1
hðt�sÞgðeðsÞÞ ds
� �T
:
It follows from condition (5) and Ito’s formula that
EV ðt; eðtÞÞ�EV ð0; eð0ÞÞ ¼
Z t
0
ELVr0; t40;
which implies that
eatlminðPÞEjjeðtÞjj2rEV ðt; eðtÞÞrEV ð0; eð0ÞÞ; t40: ð11Þ
Furthermore, we note that
EV ð0; eð0ÞÞ ¼ EeT ð0ÞPeð0Þ þ
Z 0
�tð0ÞeasEeT ðsÞQ1eðsÞ dsþ
Z 0
�tð0ÞeasEgT ðeðsÞÞQ2gðeðsÞÞ ds
þXn
j¼1
qð3Þj
Z 10
hjðuÞ
Z 0
�u
eaðsþuÞEg2j ðejðsÞÞ ds du
rEeT ð0ÞPeð0Þ þ lmaxðQ1Þ
Z 0
�tEeT ðsÞeðsÞ dsþ lmaxðQ2Þ
Z 0
�tEgT ðeðsÞÞgðeðsÞÞ ds
þXn
j¼1
qð3Þj d2j
Z 10
hjðuÞeau
Z 0
�u
easEe2j ðsÞ ds du

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1273
rbEjjc�jjj2w þ tlmaxðQ1ÞEjjc�jjj2w þ td2lmaxðQ2ÞEjjc�jjj2w
þ1
a
Xn
i¼1
qð3Þj d2j h
%
j Ejjc�jjj2w
r bþ tlmaxðQ1Þ þ td2lmaxðQ2Þ þ1
a
Xn
i¼1
qð3Þj d2j h
%
j
( )Ejjc�jjj2w; ð12Þ
where d ¼ maxj2Ldj, dj ¼ maxfjd�j j; jdþj jg.
Substituting Eq. (12) into Eq. (11), we finally obtain
EjjeðtÞjj2rMEjjc�jjj2we�at; t40;
where
M ¼bþ tlmaxðQ1Þ þ td2lmaxðQ2Þ þ ð1=aÞ
Pni¼1 q
ð3Þj d2j h
%
j
lminðPÞ40:
Using Definition 2.1, we can conclude that systems (1) and (2) can be exponentiallysynchronized. This completes the proof. &
Remark 3.1. From Theorem 3.1, one may find that the constant a is the convergence rateof exponential synchronization between systems (1) and (2).
In order to estimate the gain matrices K1 and K2, we give the following desirable result:
Corollary 3.1. Assume that assumptions (H1)–(H3) hold. Then systems (1) and (2) are
exponentially synchronized if there exist two constants a 2 ð0; ZÞ; b40, four n� n matrices
Q140;Q240;Y1;Y2, and four n� n diagonal matrices P40;Q340;U140;U240, such
that PrbI and
C11 0 C13 PBþ Y2 PW
% C22 0 U2S2 0
% % C33 0 0
% % % C44 0
% % % % �Q3
0BBBBBB@
1CCCCCCAo0;
where C11 ¼ aP�PC�CPþQ1 þ bG1�U1S1, C13 ¼ PAþ Y1 þU1S2, C22 ¼
bG2�ð1�rÞe�atQ1�U2S1, C33 ¼ Q2 þQ3H�U1, C44 ¼ �ð1�rÞe�atQ2�U2, H ¼diagðh%
1 ; . . . ; h%
n Þ.
Proof. Let K1=P�1Y1, K2=P�1Y2 in Theorem 3.1, then we can obtain the resultimmediately. &
Remark 3.2. Recently, Liu et al. [37] have investigated the pth moment exponentialsynchronization of systems (1) and (2) by establishing two new integro-differentialinequalities. Moreover, some strict constraints on time delays and kernel functions areremoved. Unfortunately, the obtained results in [37] cannot be applied to stochasticnetwork models with high-dimensions. Moreover, it is not convenient to apply thosecriteria to real networks. Hence, the present paper makes up the gap and improves those inRef. [37]. In Section 4, a numerical example will be given to show the advantages of ourresults.

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801274
Remark 3.3. When W=0, systems (1) and (2) become the following simple neuralnetworks [30,34]:
dxðtÞ ¼ ½�CxðtÞ þ Af ðxðtÞÞ þ Bf ðxðt�tðtÞÞÞ þ J� dt; t40;
xðsÞ ¼ jðsÞ; s 2 ð�1; 0�
(ð13Þ
and
dyðtÞ ¼ ½�CyðtÞ þ Af ðyðtÞÞ þ Bf ðyðt�tðtÞÞÞ þ J þ uðtÞ� dtþ sðt; eðtÞ; eðt�tðtÞÞÞ doðtÞ; t40;
yðsÞ ¼ cðsÞ; s 2 ð�1; 0�:
(
ð14Þ
By Corollary 3.1, we have the following result:
Corollary 3.2. Assume that assumptions (H1) and (H3) hold. Then systems (13) and (14) are
exponentially synchronized if there exist two constants a40;b40, four n� n matrices
Q140;Q240;Y1;Y2, and three n� n diagonal matrices P40;U140;U240, such that
PrbI and
C11 0 C13 PBþ Y2
% C22 0 U2S2
% % Q2�U1 0
% % % C44
0BBB@
1CCCAo0;
where C11 ¼ aP�PC�CPþQ1 þ bG1�U1S1, C13 ¼ PAþ Y1 þU1S2, C22 ¼ bG2�
ð1�rÞe�atQ1�U2S1, C44 ¼ �ð1�rÞe�atQ2�U2.
Remark 3.4. In [30,34], the authors have presented some exponential synchronizationschemes for systems (13) and (14) via the adaptive feedback controller or time-delayfeedback controller. In this paper, we present a new exponential synchronization schemefor systems (13) and (14) via output coupling with delay feedback. Therefore, our resultsand those established in [30,34] are complementary each other.
4. A numerical example
In this section, a numerical example is given to show the effectiveness and advantages ofthe obtained results.
Example 4.1. Consider the following three-dimensional chaotic neural network models:
dxðtÞ ¼ �CxðtÞ þ Af ðxðtÞÞ þ Bf ðxðt�tðtÞÞÞ þWR t
�1hðt�sÞf ðxðsÞÞ dsþ J
� �dt; t40;
xðsÞ ¼ jðsÞ; s 2 ð�1; 0�;
(
ð15Þ
where the initial condition fðsÞ ¼ ð2;�1;�1:5ÞT , s 2 ð�1; 0�, f ðxÞ ¼ tanhðxÞ, tðtÞ ¼ 0:3,J ¼ ð0; 0; 0ÞT . For the simplicity of our computer simulations, the delay kernel h(s) is usedas follows: h(s)=e�s for s 2 ½0; 20�, and h(s)=0 for s420. In addition, the parameter

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1275
matrices C, A, B and W are given as follows:
C ¼
1 0 0
0 1 0
0 0 1
0B@
1CA; A ¼
1:25 �3:2 �3:2
�3:2 1:1 �4:4
�3:2 4:4 1
0B@
1CA; B ¼
6:3 �8:5 �3
�3 1:2 �5:5
�3:2 4:5 �2:3
0B@
1CA;
W ¼
0:6000 �3:99 �6:03
�0:99 3:15 �3:111
�0:945 0:969 0:285
0B@
1CA:
The corresponding response system is designed as follows:
dyðtÞ ¼ �CyðtÞ þ Af ðyðtÞÞ þ Bf ðyðt�tðtÞÞÞ þWR t
�1hðt�sÞf ðyðsÞÞ dsþ J þ uðtÞ
� �dt
þ sðt; eðtÞ; eðt�tðtÞÞÞ doðtÞ; t40;
yðsÞ ¼ cðsÞ; s 2 ð�1; 0�;
8><>:
ð16Þ
where the initial condition jðsÞ ¼ ð�3; 6; 3ÞT , s 2 ð�1; 0�, uðtÞ ¼ K1½f ðyðtÞÞ�f ðxðtÞÞ�þ
K2½f ðyðt�tðtÞÞÞ�f ðxðt�tðtÞÞÞ�, and
sðt; eðtÞ; eðt�tðtÞÞÞ ¼
0:6e1ðt�tðtÞÞ
0:8e2ðt�tðtÞÞ
0:9e3ðt�tðtÞÞ
0B@
1CA:
Clearly, we have G1 ¼ 0, G2 ¼ diagð0:36; 0:64; 0:81Þ and H ¼ diagð1:25; 1:25; 1:25Þ. LetZ ¼ 0:2; a ¼ 0:1, using Matlab LMI toolbox, we can obtain the following feasible solutionsto LMIs in Corollary 3.1: b ¼ 53:4554,
P ¼
39:0420 0 0
0 39:0420 0
0 0 39:0420
0B@
1CA; Q1 ¼
28:2645 �2:5008 2:7672
�2:5008 49:1886 �1:4911
2:7672 �1:4911 61:5409
0B@
1CA;
Q2 ¼
664:8512 19:0098 �16:7751
19:0098 614:3913 1:5378
�16:7751 1:5378 604:6317
0B@
1CA; Q3 ¼
1902:8 0 0
0 1902:8 0
0 0 1902:8
0B@
1CA;
U1 ¼
3436:5 0 0
0 3436:5 0
0 0 3436:5
0B@
1CA; U2 ¼
95:8793 0 0
0 95:8793 0
0 0 95:8793
0B@
1CA;
Y1 ¼ 103 �
�1:7671 0:1249 0:1249
0:1249 �1:7612 0:1718
0:1249 �0:1718 �1:7573
0B@
1CA;
Y2 ¼
�245:9646 331:8570 117:1260
117:1260 �46:8504 214:7310
124:9344 �175:6890 89:7966
0B@
1CA:

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801276
Thus, the controller gain matrices K1 and K2 are designed as follows:
K1 ¼ P�1Y1 ¼
�45:2606 3:2 3:2
3:2 �45:1106 4:4
3:2 �4:4 �45:0106
0B@
1CA;
K2 ¼ P�1Y2 ¼
�6:3 8:5 3:0
3:0 �1:2 5:5
3:2 �4:5 2:3
0B@
1CA: ð17Þ
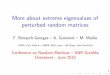
It follows from Corollary 3.1 and Remark 3.1 that systems (15) and (16) are exponentiallysynchronized with a convergence rate 0.1. The simulation results are illustrated inFigs. 2(c) and 3(a)–(d) in which the controller designed in Eq. (17) is applied.
Remark 4.1. In the simulations, we choose the time step size h=0.005 and time segmentT=40. The initial condition of drive system (15): fðsÞ ¼ ð2;�1;�1:5ÞT , s 2 ð�1; 0�; theinitial condition of response system (16): jðsÞ ¼ ð�3; 6; 3ÞT , s 2 ð�1; 0�. The simulationresults can be described as follows. Figs. 1(a)–(d) show the state trajectories and the errortrajectories of drive system (15) and response system (16) without control input. It isobvious that the synchronization error between drive system and response one does notapproach to zero when the control input does not apply. Figs. 2(a)–(c) depict the chaotic
0 5 10 15 20 25 30 35 40
−40
−20
0
20
40
60
t
x 1 (t
), y 1
(t)
x1 (t)y1 (t)
0 5 10 15 20 25 30 35 40−10
−5
0
5
10
15
20
t
0 5 10 15 20 25 30 35 40t
0 5 10 15 20 25 30 35 40t
x 2 (t
), y 2
(t)
−60
−40
−20
0
20
40
x 3 (t
), y 3
(t)
−60
−40
−20
0
20
40
60
e 1 (t
), e 2
(t),
e 3 (t
)
e1 (t) e2 (t) e3 (t)x3 (t)y3 (t)
x2 (t)y2 (t)
Fig. 1. State trajectories and error trajectories of drive system (15) and response system (16) without control
input.

−20−10 0
1020
−10−5
05
10−10
−5
0
5
10
x1 (t)
x2 (t)
x 3 (t
)
−100−50
050
−40−200
2040
−20
−10
0
10
20
y2 (t)
y 3 (t
)
−20 −10 0 1020
−10−5
05
10−10
−5
0
5
10
y 3 (t
)
y1 (t)
y2 (t) y1 (t)
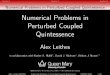
Fig. 2. (a) The chaotic behavior of drive system (15) in phase space with the initial condition
fðsÞ ¼ ð2;�1;�1:5ÞT , s 2 ð�1; 0�. (b) The chaotic behavior of response system (16) in phase space without
control input with the initial condition jðsÞ ¼ ð�3; 6; 3ÞT , s 2 ð�1; 0�. (c) The chaotic behavior of response system(16) in phase space with control input (17) and the initial condition jðsÞ ¼ ð�3; 6; 3ÞT , s 2 ð�1; 0�.
X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1277
behavior in phase space of system (15), system (16) without control input and system (16)with control input designed in Eq. (17), respectively. Figs. 3(a)–(d) show the statestrajectories and error trajectories of drive system (15) and response one (16) with controlinput designed in Eq. (17). From the simulations, we can see that the exponentialsynchronization of system (15) is realized via the feedback gain matrices K1,K2, and thosesimulations match the obtained results perfectly.
Remark 4.2. It is easy to check that the results in [37] are not applicable to ascertain theexponential synchronization between drive system (15) and response one (16). In fact, wenotice that for three-dimensional system (15)
g2Znp � 0:81p=2 � 5p�1Z36:4541
for any pZ2. Therefore, the conditions of Theorems 3.3–3.5 in [37] are not satisfied.
5. Conclusions
In this paper, we investigate the synchronization problem of stochasticperturbed chaotic neural networks with time-varying delays and unboundeddistributed delays. We have proposed a novel control scheme for exponential chaossynchronization by using Lyapunov–Krasovskii functional, drive-response concept,

0 5 10 15 20 25 30 35 40
−20
−10
0
10
20
30
t
x 1 (t
), y 1
(t)
x1 (t)y1 (t)
0 5 10 15 20 25 30 35 40−10
−5
0
5
10
t
x 2 (t
), y 2
(t)
0 5 10 15 20 25 30 35 40
−10
−5
0
5
10
15
t
x 3 (t
), y 3
(t)
0 2 4 6 8 10
−10
−5
0
5
10
t
e 1 (t
), e 2
(t),
e 3 (t
)e1 (t)e2 (t)e3 (t)
x3 (t)y3 (t)
x2 (t)y2 (t)
Fig. 3. State trajectories and error trajectories of drive system (15) and response system (16) with control input
(17).
X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801278
output coupling with delay feedback and linear matrix inequality approach. The gainedresults generalize and improve some of the existing results mentioned in the literature.Finally, a numerical simulation is provided to show the effectiveness and applicability ofthe obtained results.
Acknowledgements
The authors would like to thank the associate editor and the referees for their detailedcomments and valuable suggestions which considerably improved the presentation of thepaper.
References
[1] K. Aihara, T. Takabe, M. Toyoda, Chaotic neural networks, Physics Letters A 144 (1990) 333–340.
[2] T. Kwok, K. Smith, Experimental analysis of chaotic neural network models for combinatorial optimization
under a unifying framework, Neural Networks 13 (2000) 731–744.
[3] W. Yu, J. Cao, Cryptography based on delayed chaotic neural networks, Physics Letters A 356 (2006)
333–338.
[4] Y. Zhang, Z. He, A secure communication scheme based on cellular neural networks, Proceedings of the
IEEE International Conference on Intelligent Processing Systems 1 (1997) 521–524.

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–1280 1279
[5] Z. Tan, M. Ali, Associative memory using synchronization in a chaotic neural network, International
Journal of Modern Physics C 12 (2001) 19–29.
[6] V. Milanovic, M. Zaghloul, Synchronization of chaotic neural networks and applications to communica-
tions, International Journal of Bifurcation and Chaos 6 (1996) 2571–2585.
[7] G. Chen, J. Zhou, Z. Liu, Global synchronizaton of coupled delayed neural networks and applications to
chaotic CNN model, International Journal of Bifurcation Chaos 14 (2004) 2229–2240.
[8] H. Lu, Chaotic attractors in delayed neural networks, Physics Letters A 298 (2002) 109–116.
[9] M. Gilli, Strange attractors in delayed cellular neural networks, IEEE Transactions on Circuits and Systems I
40 (1993) 849–853.
[10] J. Cao, On stability of delayed cellular neural networks, Physics Letters A 261 (1999) 303–308.
[11] Q. Zhu, J. Cao, Stochastic stability of neural networks with both Markovian jump parameters and
continuously distributed delays, Discrete Dynamics in Nature and Society 2009 (2009) 1–20.
[12] J. Qiu, J. Cao, Delay-dependent exponential stability for a class of neural networks with time delays and
reaction–diffusion terms, Journal of the Franklin Institute 346 (2009) 301–314.
[13] X. Li, Global exponential stability for a class of neural networks, Applied Mathematics Letters 22 (2009)
1235–1239.
[14] Y. Xia, Z. Huang, M. Han, Exponential p-stability of delayed Cohen–Grossberg-type BAM neural networks
with impulses, Chaos, Solitons and Fractals 38 (2008) 806–818.
[15] Y. Xia, J. Cao, Z. Huang, Existence and exponential stability of almost periodic solution for shunting
inhibitory cellular neural networks with impulses, Chaos, Solitons and Fractals 34 (2007) 1599–1607.
[16] X. Li, Existence and global exponential stability of periodic solution for impulsive Cohen–Grossberg-type
BAM neural networks with continuously distributed delays, Applied Mathematics and Computation 215
(2009) 292–307.
[17] X. Li, Z. Chen, Stability properties for Hopfield neural networks with delays and impulsive perturbations,
Nonlinear Analysis: Real World Applications 10 (2009) 3253–3265.
[18] L. Yin, X. Li, Impulsive stabilization for a class of neural networks with both time-varying and distributed
delays, Advances in Difference Equations 2009 (2009) 1–12.
[19] Q. Song, Design of controller on synchronization of chaotic neural networks with mixed time-varying delays,
Neurocomputing 72 (2009) 3288–3295.
[20] M. Liu, Optimal exponential synchronization of general chaotic delayed neural networks: an LMI approach,
Neural Networks 22 (2009) 949–957.
[21] Q. Song, Synchronization analysis of coupled connected neural networks with mixed time delays,
Neurocomputing 72 (2009) 3907–3914.
[22] J. Cao, L. Li, Cluster synchronization in an array of hybrid coupled neural networks with delay, Neural
Networks 22 (2009) 335–342.
[23] Y. Yang, J. Cao, Exponential lag synchronization of a class of chaotic delayed neural networks with
impulsive effects, Physica A: Statistical Mechanics and its Applications 386 (2007) 492–502.
[24] J. Cao, P. Li, W. Wang, Global synchronization in arrays of delayed neural networks with constant and
delayed coupling, Physics Letters A 353 (2006) 318–325.
[25] T. Li, et al., Exponential synchronization of chaotic neural networks with mixed delays, Neurocomputing 71
(2008) 3005–3019.
[26] T. Li, et al., Synchronization control of chaotic neural networks with time-varying and distributed delays,
Nonlinear Analysis: Theory, Methods and Applications 71 (2009) 2372–2384.
[27] S. Haykin, Neural Networks, Prentice-Hall, Englewood Cliffs, NJ, 1994.
[28] S. Blythe, X. Mao, X. Liao, Stability of stochastic delay neural networks, Journal of the Franklin Institute
338 (2001) 481–495.
[29] Y. Sun, J. Cao, Adaptive lag synchronization of unknown chaotic delayed neural networks with noise
perturbation, Physics Letters A 364 (2007) 277–285.
[30] Y. Sun, J. Cao, Z. Wang, Exponential synchronization of stochastic perturbed chaotic delayed neural
networks, Neurocomputing 70 (2007) 2477–2485.
[31] X. Yang, J. Cao, Stochastic synchronization of coupled neural networks with intermittent control, Physics
Letters A 373 (2009) 3259–3272.
[32] H. Gu, Adaptive synchronization for competitive neural networks with different time scales and stochastic
perturbation, Neurocomputing 73 (2009) 350–356.
[33] Z. Chen, Complete synchronization for impulsive Cohen–Grossberg neural networks with delay under noise
perturbation, Chaos, Solitons and Fractals 42 (2009) 1664–1669.

X. Li et al. / Journal of the Franklin Institute 347 (2010) 1266–12801280
[34] X. Li, J. Cao, Adaptive synchronization for delayed neural networks with stochastic perturbation, Journal of
the Franklin Institute 345 (2008) 779–791.
[35] W. Yu, J. Cao, Synchronization control of stochastic delayed neural networks, Physica A 373 (2007)
252–260.
[36] Y. Tang, R. Qiu, J. Fang, Q. Miao, M. Xia, Adaptive lag synchronization in unknown stochastic chaotic
neural networks with discrete and distributed time-varying delays, Physics Letters A 372 (2008) 4425–4433.
[37] Z. Liu, et al., pth moment exponential synchronization analysis for a class of stochastic neural networks with
mixed delays, Communications in Nonlinear Science and Numerical Simulation 15 (2010) 1899–1909.
[38] P. Gahinet, A. Nemirovski, A. Laub, M. Chilali, LMI Control Toolbox User’s Guide, The Mathworks,
Massachusetts, 1995.
[39] V. Bondarenko, High-dimensional chaotic neural network under external sinusoidal force, Physics Letters A
236 (1997) 513–519.
[40] J. Yuan, T. Fine, Neural-network design for small training sets of high dimension, IEEE Transactions on
Neural Networks 9 (1998) 266–280.
[41] Y. Liu, Z. Wang, X. Liu, Global exponential stability of generalized recurrent neural networks with discrete
and distributed delays, Neural Networks 19 (2006) 667–675.
[42] Z. Wang, H. Shu, Y. Liu, D.W.C. Ho, X. Liu, Robust stability analysis of generalized neural networks with
discrete and distributed time delays, Chaos, Solitons and Fractals 30 (2006) 886–896.
[43] Y. Tang, J. Fang, Robust synchronization in an array of fuzzy delayed cellular neural networks with
stochastically hybrid coupling, Neurocomputing 72 (2009) 3253–3262.
[44] Y. Tang, J. Fang, M. Xia, X. Gu, Synchronization of Takagi–Sugeno fuzzy stochastic discrete-time complex
networks with mixed time-varying delays, Applied Mathematical Modelling 34 (2010) 843–855.

![Asymptotic behavior of singularly perturbed control …€¦ · Asymptotic behavior of singularly perturbed control ... [Lions, Papanicolau, Varadhan 1986]; ... Asymptotic behavior](https://img.pdfslide.us/doc/110x75/5b7c19bc7f8b9a9d078b9b98/asymptotic-behavior-of-singularly-perturbed-control-asymptotic-behavior-of-singularly.jpg)