Embed Size (px)
Citation preview
Nonlinear DynDOI 10.1007/s11071-014-1582-z
ORIGINAL PAPER
Synchronization error bound of chaotic delayed neuralnetworks
S. Jeeva Sathya Theesar · K. Ratnavelu
Received: 20 January 2014 / Accepted: 5 July 2014© Springer Science+Business Media Dordrecht 2014
Abstract Synchronization of master–slave chaoticneural networks are well studied through asymptoticand exponential stability of error dynamics. Besidesqualitative properties of error dynamics, there is a needto quantify the error in real-time experiments espe-cially in secure communication system. In this article,we focused on quantitative analysis of error dynam-ics by finding the exact analytical error bound for thesynchronization of delayed neural networks. Using theHalanay inequality, the error bound is going to beobtained in terms of exponential of given system para-meters and delay. The time-varying coupling delay hasbeen considered in the neural networks which does notrequire any restrictive condition on the derivative of thedelay. The proposed method can also be applied to finderror bound for state estimation problem. The analyt-ical synchronization bound has been corroborated bytwo examples.
Keywords Synchronization · Error bound · Neuralnetworks · Time-varying delay
1 Introduction
Chaos is a complex nonlinear phenomena. Due to thesensitive dependence on its initial condition, chaotic
S. Jeeva Sathya Theesar (B) · K. RatnaveluInstitute of Mathematical Sciences, Universiti Malaya,50603 Kuala Lumpur, Malaysiae-mail: [email protected]
systems defy synchronization [1,2]. Pecora and Carrolfound a mechanism [3,4] for synchronization in chaoticsystem, and it became an essential procedure due to itswide applications in the field of Science, Engineeringand Biology. In the past decade, a variety of approacheshave been proposed for the synchronization of chaoticsystems [1,4–36]. Synchronization analysis since itsinception has been employed to various real-time prob-lems such as secure communication in a network usinglaser optics, genetic networks, etc. [8,22,23,37,38].The vast literature on synchronization of chaotic sys-tems proves its durability and effectiveness in terms ofits applications.
Neural networks is a special complex networks [26,33,39]. Recently, qualitative properties of neural net-works especially the stability, state estimation and syn-chronization stability of neural networks opened poten-tial applications in different fields such as combinator-ial optimization, pattern recognition, signal and imageprocessing; see [20,21,23,25–27,30,31,33,36,40] andreferences therein. Time delay usually arises due to thefinite transmission time of matter, energy and infor-mation, and changes fundamentality of the dynam-ics of system [41,42]. Time delay in the neural net-works is also inevitable, and while implementing aneural network digitally, it is essential to considerthe occurrence of time delay during the interactionbetween the neurons, and eventually affect the dynamicbehavior of the neural network model [2,16–18,21,24–26,28,30,31,34–36,40]. It is found that neural net-works may make their dynamical behaviors much more
123

S. Jeeva Sathya Theesar, K. Ratnavelu
complicated by producing strange famous double-scroll attractor [5,40]. Recently, the chaos synchro-nization phenomenon for delayed neural networks hasdrawn increasing attention [5,7,12–17,20,21,26,30,31,36,40]. Many results dealing with chaos synchro-nization in delayed neural networks used linear matrixinequality techniques to find the sufficient conditionsfor the global stability of the synchronization mani-fold [5,7,9,15,19,21,22,28,31,36].
In [31], exponential synchronization of delayedneural networks has been studied using M-matrixapproach. Complete synchronization and exponentialsynchronization of chaotic neural networks with time-varying delay have been studied in [7] and [21], respec-tively, using delay decomposition approach. The resultsin [7,21] ensures synchronization stability of the errordynamics with maximum allowable upper bound ofdelay. Recently, Senthilkumar et al. [25] studied globalgeneralized synchronization in networks of differenttime delay systems and Song et al. [26] focused onclustering synchronization of coupled neural networkswith mixed delays and nonlinear coupling. Tang etal. [27] proposed distributed robust synchronizationof dynamical networks with stochastic coupling. Theauthors in [8] proposed secure communication schemeusing optical star networks. It is worth pointing outthat these analytical frameworks mostly focused on thequalitative properties of the error dynamics. However,boundedness of error occurred while synchronizationexists have not been discussed thoroughly. For exam-ple, in secure communication networks [8], initial erroris inevitable in real time but the error was not quantified.In other words, the cost involving the error betweensynchronization is high and there falls the necessaryrequirement on finding the error bound which wouldshed new light in finite time synchronization problems.To the best of authors’ knowledge, the problem of find-ing error bound of chaotic delayed neural networks isstill unexplored. With these motivation, we intendedto obtain the exact analytical error bound for synchro-nization of chaotic neural networks with time-varyingdelay. The error bound has been obtained using gen-eralized Halanay inequality [43,44] which is depen-dent on maximum upper bound of delay and delayhistory function. Previously, some results in the litera-ture [13,18,19,45] had been discussed on the bound-edness of the error dynamics. Synchronization errorbound was obtained [18] for the constant coupling casewith restrictive conditions τ (t) < 1. On the other hand,
using Halanay inequality [43,44], the error bound hasbeen obtained for bidirectional-coupled delay systems.Few investigations using Halanay inequality have beenproposed in [13,19]. Recently, Senthilkumar et al. [45]obtained analytical error bound for synchronization ofchaotic delayed systems with bidirectional coupling.However, the result can not be applied to synchroniza-tion of neural networks with time-varying delay. More-over, in this study, the considered time-varying cou-pling delay in the neural networks does not require anyrestrictive condition on the derivative of the delay. Fur-thermore, this exact synchronization bound assures theexponential stability of the error dynamics and henceexponential synchronization of chaotic delayed neuralnetworks [21].
The remaining of this paper is organized as follows:In Sect. 2, synchronization problem between masterand slave neural networks with time-varying delay isformulated. The analytical synchronization error boundhas been obtained as main result and presented inSect. 3. Section 4 is devoted to the numerical simu-lation of the proposed scheme. The paper is concludedwith discussion on existing results in Sect. 5.
2 Synchronization problem formulation
In order to obtain the analytical error bound, we followthe synchronization problem formulation given in ourearlier results [7,21]. Following derive–response con-cept, the unidirectional-coupled nonlinear neural net-works are described by the following delay differen-tial equation. Consider the following neural networkas derive system:
xi (t) = −di xi (t) +n∑
j=1
ai j g j (x j (t))
+n∑
j=1
bi j g j (x j (t − τ(t))) + Ji ,
i = 1, 2, . . . , n. (1)
and the response system is
yi (t) = −di yi (t) +n∑
j=1
ai j g j (y j (t))
+n∑
j=1
bi j g j (y j (t − τ(t))) + Ji + ui (t),
i = 1, 2, . . . , n. (2)
123
Synchronization error bound of chaotic delayed neural networks
where n ≥ 2 denotes the number of neurons in thenetworks, xi (t) and yi (t) are the state variables asso-ciated with i th neuron of derive and response sys-tems, respectively, at time t ≥ 0. ai j and bi j indi-cate the interconnection weight values among the neu-rons without and with time-varying delay, respectively.The neuron activation function gi describes the man-ner in which the neurons respond to each other. Ji
denotes the constant external input and ui (t) be anunidirectional-coupled term, which is considered ascontrol input and will be appropriately designed toobtain certain control objective. Furthermore, τ(t) rep-resents the transmission fast time-varying delay suchthat 0 ≤ τ(t) ≤ τM . System (1) and (2) possessinitial conditions xi (t) = θi (t) ∈ C([−τM , 0], R)
and yi (t) = ϑi (t) ∈ C([−τM , 0], R) known asdelay history functions for master (1) and slave (2)systems, respectively, where C([−τM , 0], R) denotesthe set of all continuous functions from [−τM , 0]to R.
We further assume that g j (·) satisfy the followingassumption:
(H1): Each function g j : R → R is sector bounded;that is, there exists a positive real l j such that
0 ≤ g j (ξ1) − g j (ξ2)
ξ1 − ξ2≤ l j for any ξ1, ξ2 ∈ R,
with ξ1 �= ξ2 and j = 1, 2, . . . , n. (3)
The above assumption on the neuron activationfunctions would provide large class of chaotic neuralnetworks including the commonly used bipolar sig-moidal function g(p) = 1−e−εp
1+e−εp , ε > 0 in the Hop-
field neural networks [30], g(p) = |p+1|−|p−1|2 in
the cellular neural networks (CNNs) [12], etc. Definethe synchronization error as ei (t) = yi (t) − xi (t).Thus, the error dynamical system can be representedas,
ei (t) = −di ei (t) +n∑
j=1
ai j{g j (y j (t)) − g j (x j (t))
}
+n∑
j=1
bi j{g j (y j (t − τ(t))) − g j (x j (t − τ(t)))
}
+ ui (t). (4)
In order to ensure synchronization of coupledneural networks, the control input ui (t) is designed asfollows
u(t) = K e(t)
=
⎡
⎢⎢⎢⎣
ω11 0 . . . 00 ω22 . . . 0...
.... . .
...
0 0 . . . ωnn
⎤
⎥⎥⎥⎦
⎡
⎢⎢⎢⎣
x1(t) − y1(t)x2(t) − y2(t)
...
xn(t) − yn(t)
⎤
⎥⎥⎥⎦ ,
ui (t) = ωi i (xi (t) − yi (t)). (5)
where e(t) = [e1(t), e2(t), . . . , en(t)]T , K = (ωi j )n×n
∈ Rn×n is the state feedback control gain matrix, whereωi j = 0, for all i �= j . From (4) and (5), we rewrite theerror dynamic system as
ei (t) = −di ei (t) +n∑
j=1
ai j{g j (y j (t)) − g j (x j (t))
}
+n∑
j=1
bi j{g j (y j (t − τ(t)))
− g j (x j (t − τ(t)))} − wi i ei (t). (6)
Transforming (6) into vector-matrix compact form, weget
e(t) = −De(t) + A {g(y(t)) − g(x(t))}+B {g(y(t − τ(t))) − g(x(t − τ(t)))} , (7)
where D = diag{di + ωi i }, A = (ai j )n×n, B =(bi j )n×n , and
g(x(·)) = [g1(x1(·)), g2(x2(·)), . . . , gn(xn(·))]T ,
g(y(·)) = [g1(y1(·)), g2(y2(·)), . . . , gn(yn(·))]T .
Remark 1 Usually, the synchronization problem is for-mulated in such a way that the error dynamics is asymp-totically or exponentially stable under the given statefeedback controller and the gain will be determinedaccording to the admissible delay [7,11,13,14,16,17,21]. Since there were many research articles devotedin obtaining the control gain of the synchronizationcontroller, in this study without loss of generality, weassume that the control gain and the maximum allow-able upper bound of the delay exist and obtainable.The main objective of this study is to determine theexact error bound with suitable control gain, maximumallowable delay.
The error dynamics possess initial conditions χi (t)= ϑi (t) − θi (t) ∈ C([−τ , 0], R). Now we state thefollowing definitions and lemmas which will be usedin the sequel.
Definition 1 (Asymptotic stability) The derive (1) andresponse (2) systems are said to be asymptotically syn-chronized if and only if the error dynamical systems
123

S. Jeeva Sathya Theesar, K. Ratnavelu
(4) is globally asymptotically stable for the equilib-rium point ei (t) = 0. That is e(t) → 0 as t → ∞, forall i .
Definition 2 (Exponential stability) The equilibriumpoint of ei (t) = 0 is globally exponentially stable ifthere exists constants η > 0, M > 0 such that for anyinitial delay history function χi (t),
ei (t, t0, χi (t)) < M |χi (t)| exp(−η(t − t0)), t ≥ t0.
Lemma 1 (Halanay inequality [43]) Suppose,
ω(t) ≤ −α(t)ω(t) + β(t) supt−τ≤σ≤t
ω(σ), (8)
for t ≥ t0. Here, τ ≥ 0, α(t) and β(t) are the continu-ous with α(t) ≥ α0 > 0 and 0 < β(t) ≤ εα(t) for allt ≥ t0 with 0 ≤ ε < 1. Then,
ω(t) ≤ G exp(−γ ∗ (t − t0)), (9)
for t ≥ t0. Here,
G = supt0−τ≤t≤t0
|ω(t)|, (10)
and γ ∗ > 0 is defined as
γ ∗ = inft≥t0
{γ (t): γ (t) − α(t) + β(t) exp(γ (t)τ ) = 0} .
(11)
With these basic platform, we now proceed to obtainthe analytic error bound condition for synchronizationof delayed neural networks.
3 Analytical error bound
In this section, we derive the analytical error boundfor synchronization of chaotic neural networks in thefollowing theorem. We present applicable condition forpractical use in synchronization and communicationproblems.
Theorem 1 Under the assumptions (H1), the givensynchronization error in (4) is bounded and exponen-tially stable, if
di + ωi i − αi − 1
2βi > 0, (12)
and
ε
{di + ωi i − αi − 1
2βi
}≥ 1
2βi > 0, (13)
where 0 < ε ≤ 1, αi = ∑nj=1 ai j l j and βi =∑n
j=1 bi j l j , i = 1, 2, . . . , n and the bound for the syn-chronization error dynamics is given by
|ei (t)| ≤ |√
χ2i exp(−ϕi t)|, (14)
and ϕi ’s are unique positive solutions for each i of theexponential equations
di + ωi i − αi − 1
2ϕi − 1
2βi (1 + exp (τMϕi )) = 0.
(15)
Proof The error dynamics (7) can be written as
d(e2(t))
dt= −2De2(t) + 2A {g(y(t)) − g(x(t))} e(t)
+ 2B {g(y(t −τ(t)))−g(x(t −τ(t)))} e(t).
(16)
Applying (3) of sector bounded nonlinearity to (16),
d(e2(t))
dt≤ −2De2(t) + 2ALe2(t)
+ 2BLe(t − τ(t))e(t), (17)
where L = diag{l1, l2, . . . , ln} is the diagonal matrix.By Young’s inequality, we can obtain
d(e2(t))
dt≤ −2De2(t) + 2ALe2(t)
+ 2BL
{1
2e2(t − τ(t)) + 1
2e2(t)
}, (18)
d(e2(t))
dt≤ 2
(−D + AL + 1
2BL
)e2(t) + BLφ(t),
(19)
where φ(t) = sup−τM +t≤s≤t {e2(s)} for any t ≥ t0 withτm ≥ 0. For applying Halanay’s inequality, we have2(D − AL − 1
2 BL) > 0 and 2ε(D − AL − 12 BL) ≥
BL > 0 with 0 ≤ ε < 1. Since weight matrices areconstant entries, we rewrite them as
di + ωi i −n∑
j=1
ai j l j − 1
2
n∑
j=1
bi j l j > 0, (20)
and
2ε
⎧⎨
⎩di + ωi i −n∑
j=1
ai j l j − 1
2
n∑
j=1
bi j l j
⎫⎬
⎭
≥n∑
j=1
bi j l j > 0, (21)
123

Synchronization error bound of chaotic delayed neural networks
for each i and 0 ≤ ε < 1 with suitable control gainsωi i . Then by applying the Halanay inequality,
|ei (t)| ≤ |√φi (t0) exp(−ϕi (t − t0))|, (22)
where φi (t) = sup−τM +t≤s≤t
{e2
i (s)}
for t ≥ t0, theparameter in exponential term is given by ϕi > 0 and
ϕi = inf
{ρi (t): ζi − 1
2ρi (t)
−1
2βi exp (τMρi (t)) = 0
}, (23)
where ζi = di + ωi i − αi − 12βi and τM > 0 is the
maximum upper bound of the delay. Since the coeffi-cients are time independent and t0 = 0, the error boundestimation in (14) is obtained. Hence, the proof. Remark 2 In the above theorem, the analytical errorbound of the synchronization is obtained depending onthe maximum upper bound of the delay τM and delayhistory function. Synchronization has been achieved byassuming suitable state feedback control gain ωi i . Tothe best of authors knowledge, this is the first result topresent the analytical error bound for the synchroniza-tion of neural networks with time-varying delay. It isimportant to emphasize that the recent result presentedin [45] can not be used for neural networks describedin (1).
Remark 3 State estimation problem in neural networkshas been studied extensively [46,47] and the estima-tion setup is similar to synchronization problem. Themain advantage of the method proposed in this paperis that the conditions can be readily extendable tofind the error bound for the state estimation prob-lem. We left this part to the readers as it is an easyextension.
Remark 4 When comes to synchronization, the con-troller design plays a vital role. In this study, wechose state feedback control, and it is easy to choosea suitable coupling strength from the above proposedcondition. Consider the Eq. (12) for the case ε =1 and we have ωi i ≥ −di + ∑n
j=1
(ai j + bi j
)l j
for i = 1, 2, . . . , n. It is interesting to see that wecan algebraically determine the required control gainswhich is essential for practical use. In fact, we hadto solve complex linear matrix inequalities [5,7,15,21,36] to determine the control gains to ensure thesynchronization. On the other hand, LMIs can give
exact control gains with admissible upper bounds ofdelay.
Remark 5 Limitations of assumption (H1) on neu-ron models: Assumption 1 holds for any continuousnonlinear function which is bounded over the sec-tor [0, l j ], for 1 ≤ j ≤ n. The generalization ofthis condition could be done for [k j , l j ], where k j islower bound for each nonlinear function correspond-ing to j and the above results can be well extended.Hence, nonlinear terms in neuron models should becontinuous and sector bounded in order to the aboveresults.
4 Numerical examples
In this section, we present two neural network exam-ples to corroborate the analytical results obtained inthe previous section. All the simulations were done inMATLAB R2013a by using Intel Core i5 processingPC with 8GB memory.
Example 1 (Cellular neural network) We first considerCNN from memristor-based system [12] for simula-tion. The system parameters are d1,2 = 1.3, a11 = 1.8,
a12 =10, a21 = 0.1, a22 =1.8, b11 =−1.5, b12 = 0.1,
b21 = 0.1, b22 = −1.5, τ (t) = 1, τM = 1. The non-linear term is given by
g j (x j (·) = 1
2
(|x j (·) + 1| − |x j (·) − 1|) .
This 2-neuron neural network master dynamics pro-duced one like famous Chua’s double-scroll attractorwhich is presented in Fig. 1a. On the other hand, theerror dynamics between master and slave dynamicsproduced 3-scroll attractor which is an interesting por-trait to observe. Also it is easy to see that l j = 1 for allj . From Theorem 1, we chose the suitable control gainsfrom the inequalities ω11 − 11.3 > 0, ω22 − 1.4 > 0.Also considering the fact that ε can be chosen very nearto 1, we get similar inequality from (13) for choos-ing the control gain. The error bound for synchroniza-tion of delayed CNN model is obtained from (14) as
|ei (t)| ≤ |√
χ2i exp(−ϕi t)| with ϕ1 and ϕ2 are from the
exponential equations
ω11 − 10.5 − 1
2ϕ1 − 0.8 (1 + exp (ϕ1)) = 0, (24)
ω22 − 0.6 − 1
2ϕ2 − 0.8 (1 + exp (ϕ2)) = 0. (25)
123
S. Jeeva Sathya Theesar, K. Ratnavelu
−6 −4 −2 0 2 4 6−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
x1(t)
x 2(t)
−10 −5 0 5 10−1.5
−1
−0.5
0
0.5
1
e1(t)
e 2(t)
0 50 100 150 200 250 300 350 400−15
−10
−5
0
5
10
e 1(t)
0 50 100 150 200 250 300 350 400−1.5
−1
−0.5
0
0.5
1
time steps
e 2(t)
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
time steps
|e1(t
)|
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
time steps
|e2(t
)|
0 100 200 300 4000
0.5
1
1.5
time steps
|e2(t
)|
0 100 200 300 4000
5
10
15
time steps
|e1(t
)|
(g)(e)
(a) (b)(d)
(c)
(f) (h)1.751
10.42
0.81261.336
|e1(t)|≤|sqrt( χ
12e−0.5702*t )| |e
2(t)|≤|sqrt( χ
22 e−0.5170*t )|
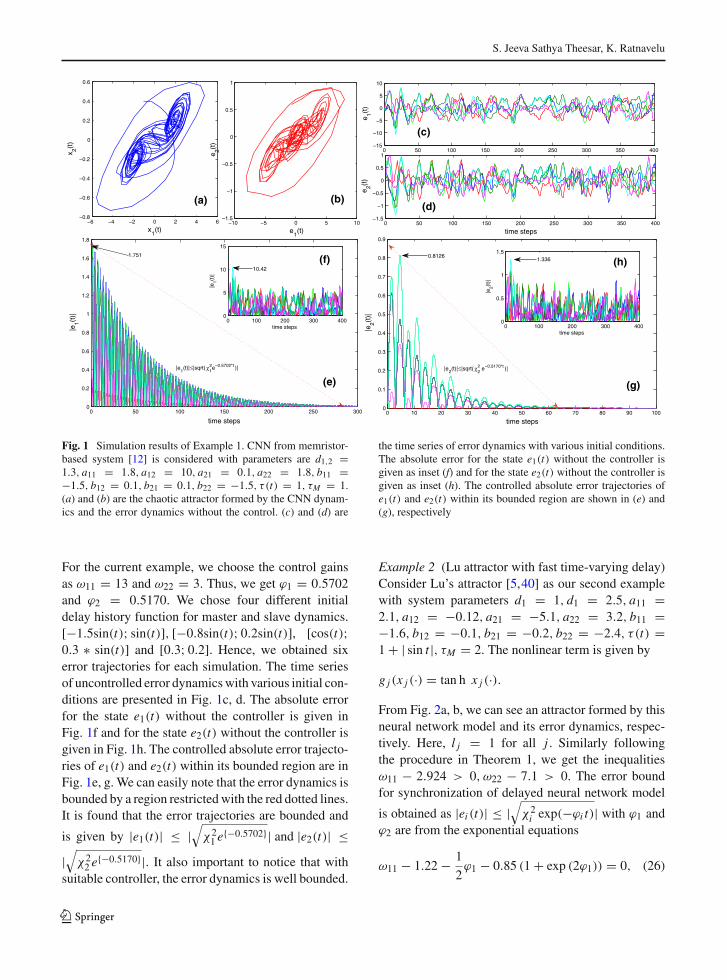
Fig. 1 Simulation results of Example 1. CNN from memristor-based system [12] is considered with parameters are d1,2 =1.3, a11 = 1.8, a12 = 10, a21 = 0.1, a22 = 1.8, b11 =−1.5, b12 = 0.1, b21 = 0.1, b22 = −1.5, τ (t) = 1, τM = 1.(a) and (b) are the chaotic attractor formed by the CNN dynam-ics and the error dynamics without the control. (c) and (d) are
the time series of error dynamics with various initial conditions.The absolute error for the state e1(t) without the controller isgiven as inset (f) and for the state e2(t) without the controller isgiven as inset (h). The controlled absolute error trajectories ofe1(t) and e2(t) within its bounded region are shown in (e) and(g), respectively
For the current example, we choose the control gainsas ω11 = 13 and ω22 = 3. Thus, we get ϕ1 = 0.5702and ϕ2 = 0.5170. We chose four different initialdelay history function for master and slave dynamics.[−1.5sin(t); sin(t)], [−0.8sin(t); 0.2sin(t)], [cos(t);0.3 ∗ sin(t)] and [0.3; 0.2]. Hence, we obtained sixerror trajectories for each simulation. The time seriesof uncontrolled error dynamics with various initial con-ditions are presented in Fig. 1c, d. The absolute errorfor the state e1(t) without the controller is given inFig. 1f and for the state e2(t) without the controller isgiven in Fig. 1h. The controlled absolute error trajecto-ries of e1(t) and e2(t) within its bounded region are inFig. 1e, g. We can easily note that the error dynamics isbounded by a region restricted with the red dotted lines.It is found that the error trajectories are bounded and
is given by |e1(t)| ≤ |√
χ21 e{−0.5702}| and |e2(t)| ≤
|√
χ22 e{−0.5170}|. It also important to notice that with
suitable controller, the error dynamics is well bounded.
Example 2 (Lu attractor with fast time-varying delay)Consider Lu’s attractor [5,40] as our second examplewith system parameters d1 = 1, d1 = 2.5, a11 =2.1, a12 = −0.12, a21 = −5.1, a22 = 3.2, b11 =−1.6, b12 = −0.1, b21 = −0.2, b22 = −2.4, τ (t) =1 + | sin t |, τM = 2. The nonlinear term is given by
g j (x j (·) = tan h x j (·).From Fig. 2a, b, we can see an attractor formed by thisneural network model and its error dynamics, respec-tively. Here, l j = 1 for all j . Similarly followingthe procedure in Theorem 1, we get the inequalitiesω11 − 2.924 > 0, ω22 − 7.1 > 0. The error boundfor synchronization of delayed neural network model
is obtained as |ei (t)| ≤ |√
χ2i exp(−ϕi t)| with ϕ1 and
ϕ2 are from the exponential equations
ω11 − 1.22 − 1
2ϕ1 − 0.85 (1 + exp (2ϕ1)) = 0, (26)
123
Synchronization error bound of chaotic delayed neural networks
−3 −2 −1 0 1 2 3−4
−3
−2
−1
0
1
2
3
4
x1(t)
x 2(t)
0 25 50 75 100 125 150 175 200−5
0
5
e 1(t)
0 25 50 75 100 125 150 175 200−10
−5
0
5
10
time steps
e 2(t)
0 5 10 15 20 25 30 35 400
0.2
0.4
0.6
0.8
1
1.2
1.4
time steps
|e1(t
)|
0 5 10 15 20 25 30 35 400
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
time steps
|e2(t
)|
0 25 50 75 100 125 150 175 2000
1
2
3
4
5
time steps
|e1(t
)|
0 25 50 75 100 125 150 175 2000
2
4
6
8
time steps
|e2(t
)|
−3 −2 −1 0 1 2 3−6
−4
−2
0
2
4
6
e1(t)
e 2(t)
0.40187.5044.2651.24
(a) (c)(b)
(d)
(e)
(f) (h)
(g)
|e1(t)|≤|sqrt( χ
12e−0.0354*t )|
|e2(t)|≤|sqrt( χ
22 e−0.1672*t )|
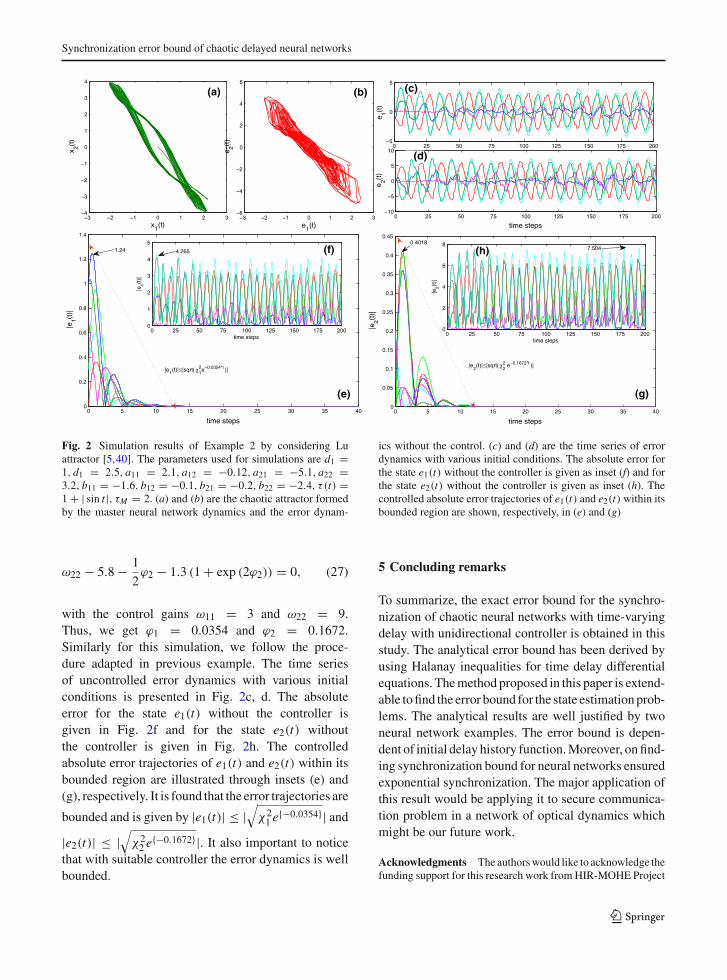
Fig. 2 Simulation results of Example 2 by considering Luattractor [5,40]. The parameters used for simulations are d1 =1, d1 = 2.5, a11 = 2.1, a12 = −0.12, a21 = −5.1, a22 =3.2, b11 = −1.6, b12 = −0.1, b21 = −0.2, b22 = −2.4, τ (t) =1 + | sin t |, τM = 2. (a) and (b) are the chaotic attractor formedby the master neural network dynamics and the error dynam-
ics without the control. (c) and (d) are the time series of errordynamics with various initial conditions. The absolute error forthe state e1(t) without the controller is given as inset (f) and forthe state e2(t) without the controller is given as inset (h). Thecontrolled absolute error trajectories of e1(t) and e2(t) within itsbounded region are shown, respectively, in (e) and (g)
ω22 − 5.8 − 1
2ϕ2 − 1.3 (1 + exp (2ϕ2)) = 0, (27)
with the control gains ω11 = 3 and ω22 = 9.Thus, we get ϕ1 = 0.0354 and ϕ2 = 0.1672.Similarly for this simulation, we follow the proce-dure adapted in previous example. The time seriesof uncontrolled error dynamics with various initialconditions is presented in Fig. 2c, d. The absoluteerror for the state e1(t) without the controller isgiven in Fig. 2f and for the state e2(t) withoutthe controller is given in Fig. 2h. The controlledabsolute error trajectories of e1(t) and e2(t) within itsbounded region are illustrated through insets (e) and(g), respectively. It is found that the error trajectories are
bounded and is given by |e1(t)| ≤ |√
χ21 e{−0.0354}| and
|e2(t)| ≤ |√
χ22 e{−0.1672}|. It also important to notice
that with suitable controller the error dynamics is wellbounded.
5 Concluding remarks
To summarize, the exact error bound for the synchro-nization of chaotic neural networks with time-varyingdelay with unidirectional controller is obtained in thisstudy. The analytical error bound has been derived byusing Halanay inequalities for time delay differentialequations. The method proposed in this paper is extend-able to find the error bound for the state estimation prob-lems. The analytical results are well justified by twoneural network examples. The error bound is depen-dent of initial delay history function. Moreover, on find-ing synchronization bound for neural networks ensuredexponential synchronization. The major application ofthis result would be applying it to secure communica-tion problem in a network of optical dynamics whichmight be our future work.
Acknowledgments The authors would like to acknowledge thefunding support for this research work from HIR-MOHE Project
123
S. Jeeva Sathya Theesar, K. Ratnavelu
UM.C/625/1/HIR/MOHE/SC/13, under University of Malaya,50603, Kuala Lumpur, Malaysia.
References
1. Pikovsky, A., Rosenblum, M., Kurths, J.: Synchronization -A Universal concept in Nonlinear Science. Cambridge Uni-versity Press, USA (2001)
2. Lakshmanan, M., Senthilkumar, D.V.: Dynamics of Non-linear Time-Delay Systems, Springer Series in Synergetics.Springer-Verlag, Germany, XVII (2011)
3. Carroll, Thomas L., Pecora, Louis M.: Synchronizingchaotic circuits. IEEE Transactions on Circuits and Systems38(4), 453–456 (1991)
4. Pecora, L.M., Carroll, T.L.: Synchronization in chaotic sys-tems. Physical Review Letters 64(8), 821–824 (1990)
5. Wenlian, Lu, Chen, Tianping: Synchronization of coupledconnected neural networks with delays. IEEE Transactionson Circuits and Systems I: Regular Papers 51(12), 2491–2503 (2004)
6. Abarbanel, H.D.I., Rulkov, N.F., Sushchik, M.M.: Gen-eralized synchronization of chaos: The auxiliary systemapproach. Physical Review E 53(5 SUPPL. A), 4528–4535(1996)
7. Balasubramaniam, P., Chandran, R., Jeeva Sathya Theesar,S.: Synchronization of chaotic nonlinear continuous neuralnetworks with time-varying delay. Cognitive Neurodynam-ics 5(4), 361–371 (2011)
8. Banerjee, S., Rondoni, L., Mukhopadhyay, S.: Synchroniza-tion of time delayed semiconductor lasers and its appli-cations in digital cryptography. Optics Communications284(19), 4623–4634 (2011)
9. Banerjee, Santo, Jeeva Sathya Theesar, S., Kurths, J.: Gen-eralized variable projective synchronization of time delayedsystems. Chaos: An Interdisciplinary. Journal of NonlinearScience 23(1), 013118 (2013)
10. Boccaletti, S., Kurths, J., Osipov, G., Valladares, D.L.,Zhou, C.S.: The synchronization of chaotic systems. PhysicsReports 366(1–2), 1–101 (2002)
11. Cai, S., Hao, J., Liu, Z.: Exponential synchronization ofchaotic systems with time-varying delays and parame-ter mismatches via intermittent control. Chaos: An Inter-disciplinary. Journal of Nonlinear Science 21(2), 023112(2011)
12. Chen, G., Zhou, J., Liu, Z.: Global synchronization of cou-pled delayed neural networks and applications to chaotic cnnmodels. International Journal of Bifurcation and Chaos inApplied Sciences and Engineering 14(7), 2229–2240 (2004)
13. Chen, Shun, Cao, Jinde: Projective synchronization ofneural networks with mixed time-varying delays and para-meter mismatch. Nonlinear Dynamics 67(2), 1397–1406(2012)
14. Cheng, C.-J., Liao, T.-L., Yan, J.-J., Hwang, C.-C.: Expo-nential synchronization of a class of neural networks withtime-varying delays. IEEE Transactions on Systems, Man,and Cybernetics, Part B: Cybernetics 36(1), 209–215 (2006)
15. Ahn, ChoonKi: Output feedback h∞ synchronization fordelayed chaotic neural networks. Nonlinear Dynamics59(1–2), 319–327 (2010)
16. Cui, B., Lou, X.: Synchronization of chaotic recurrent neuralnetworks with time-varying delays using nonlinear feed-back control. Chaos, Solitons and Fractals 39(1), 288–294(2009)
17. Gao, X., Zhong, S., Gao, F.: Exponential synchronization ofneural networks with time-varying delays. Nonlinear Analy-sis, Theory, Methods and Applications 71(5–6), 2003–2011(2009)
18. Ghosh, D., Banerjee, S.: Exponential stability criterion forchaos synchronization in modulated time-delayed systems.Nonlinear Analysis: Real World Applications 11(5), 3704–3710 (2010)
19. He, Wangli, Cao, Jinde: Generalized synchronization ofchaotic systems: An auxiliary system approach via matrixmeasure. Chaos: An Interdisciplinary. Journal of NonlinearScience 19(1), 013118 (2009)
20. Hu, J.: Synchronization conditions for chaotic nonlinearcontinuous neural networks. Chaos, Solitons and Fractals41(5), 2495–2501 (2009)
21. Jeeva, S., Sathya, Theesar, Chandran, R., Balasubramaniam,P.: Delay-dependent exponential synchronization criteria forchaotic neural networks with time-varying delays. BrazilianJournal of Physics 42(3–4), 207–218 (2012)
22. Jeeva, S., Sathya, Theesar, Ariffin, M.R.K., Banerjee, S.:Synchronization and a secure communication scheme usingoptical star network. Optics and Laser Technology 54, 15–21(2013)
23. Nixon, M., Fridman, M., Ronen, E., Friesem, A.A., David-son, N., Kanter, I.: Controlling synchronization in large lasernetworks. Physical Review Letters 108(21), 214101 (2012)
24. Senthilkumar, D.V., Srinivasan, K., Murali, K., Laksh-manan, M., Kurths, J.: Experimental confirmation of chaoticphase synchronization in coupled time-delayed electroniccircuits. Physical Review E 82(6), 065201(R) (2010)
25. Senthilkumar, D.V., Suresh, R., Lakshmanan, M., Kurths, J.:Global generalized synchronization in networks of differenttime-delay systems. EPL 103(5), 50010 (2013)
26. Song, Qiankun, Zhao, Zhenjiang: Cluster, local and com-plete synchronization in coupled neural networks withmixed delays and nonlinear coupling. Neural Computingand Applications (2013). doi:10.1007/s00521-012-1296-4:1-13
27. Tang, Y., Gao, H., Kurths, J.: Distributed robust synchro-nization of dynamical networks with stochastic coupling,IEEE Transactions on Circuits and Systems (2013)
28. Jeeva Sathya Theesar, S., Balasubramaniam, P., Banerjee,Santo: Projective synchronization of delayed chaotic sys-tems. In Applications of Chaos and Nonlinear Dynamics inScience and Engineering-Vol. 3, pages 277–296. Springer,Berlin Heidelberg, (2013)
29. Jeeva, S., Theesar, Sathya, Balasubramaniam, P.: Securecommunication via synchronization of lure systems usingsampled-data controller. Circuits, Systems, and SignalProcessing (2013). doi:10.1007/s00034-013-9627-y:1-16
30. Zheng-Guang, Wu, Park, Ju H., Hongye, Su, Jian, Chu: Dis-continuous lyapunov functional approach to synchroniza-tion of time-delay neural networks using sampled-data. Non-linear Dynamics 69(4), 2021–2030 (2012)
31. Xing, Z., Peng, J., Wang, K.: Exponential synchronizationof chaotic neural networks with time delays: a m-matrixapproach. Nonlinear Dynamics 62(4), 867–874 (2010)
123
Synchronization error bound of chaotic delayed neural networks
32. Yu, H., Liu, Y.: Chaotic synchronization based on stabil-ity criterion of linear systems. Physics Letters, A: General,Atomic and Solid State Physics 314(4), 292–298 (2003)
33. Yu, W., Chen, G., Lu, J., Kurths, J.: Synchronization viapinning control on general complex networks. SIAM Journalon Control and Optimization 51(2), 1395–1416 (2013)
34. Zheng, Song: Projective synchronization in a driven-response dynamical network with coupling time-varyingdelay. Nonlinear Dynamics 69(3), 1429–1438 (2012)
35. Zhou, S., Li, H., Wu, Z.: Synchronization threshold of a cou-pled time-delay system. Physical Review E 75(3), 037203(2007)
36. Zhu, Quanxin, Cao, Jinde: Adaptive synchronization ofchaotic cohen crossberg neural networks with mixed timedelays. Nonlinear Dynamics 61(3), 517–534 (2010)
37. Liu, J.M., Chen, H.F., Tang, S.: Optical-communication sys-tems based on chaos in semiconductor lasers. IEEE Trans-actions on Circuits and Systems I: Fundamental Theory andApplications 48(12), 1475–1483 (2001)
38. David, McMillen, Nancy, Kopell, Jeff, Hasty, Collins, J.J.:Synchronizing genetic relaxation oscillators by intercell sig-naling. Proceedings of Natural Academy of Sciences USA99(2), 679–684 (2002)
39. I. Belykh, M. di Bernardo, J. Kurths, and M. Porfiri. Evolv-ing dynamical networks. Physica D: Nonlinear Phenomena,pages 1–6, 2014.
40. Lu, H.: Chaotic attractors in delayed neural networks.Physics Letters, A: General, Atomic and Solid State Physics298(2–3), 109–116 (2002)
41. Lu-Chun, Du, Mei, Dong-Cheng: Time delay control ofabsolute negative mobility and multiple current reversals inan inertial brownian motor. Journal of Statistical Mechanics:Theory and Experiment 2011(11), P11016 (2011)
42. Lu-Chun, Du, Mei, Dong-Cheng: Stochastic resonance,reverse-resonance and stochastic multi-resonance in anunderdamped quartic double-well potential with noise anddelay. Physica A: Statistical Mechanics and its Applications390(20), 3262–3266 (2011)
43. Tian, Hongjiong: The exponential asymptotic stability ofsingularly perturbed delay differential equations with abounded lag. Journal of Mathematical Analysis and Appli-cations 270(1), 143–149 (2002)
44. Gopalsamy, K.: Stability and Oscillations in Delay Differen-tial Equations of Population Dynamics. Kluwar AcademicPress, The Netherlands (1992)
45. Senthilkumar, D.V., Pesquera, L., Banerjee, S., Ortin, S.,Kurths, J.: Exact synchronization bound for coupled time-delay systems. Physical Review E 87(4), 044902 (2013)
46. Wang, Zidong, Ho, D.W.C., Liu, Xiaohui: State estimationfor delayed neural networks. Neural Networks, IEEE Trans-actions on 16(1), 279–284 (2005)
47. He, Yong, Wang, Qing-Guo, Min, Wu, Lin, Chong: Delay-dependent state estimation for delayed neural networks.Neural Networks, IEEE Transactions on 17(4), 1077–1081(2006)
48. Wessel, N., Riedl, M., Kramer, J., Muller, A., Penzel, T.,Kurths, J.: Synchronisation and coupling analysis: Appliedcardiovascular physics in sleep medicine. In Proceedings of35th Annual International Conference of the IEEE Engi-neering in Medicine and Biology Society (EMBC), 2013,pages 6567–6570, (2013)
123