Embed Size (px)
Citation preview

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Switching Multirobot Collaborative Localizationin Symmetrical Environments
Fabrizio Abrate1 Basilio Bona1 Marina Indri1
Stefano Rosa1 Federico Tibaldi1
1Dipartimento Automatica e InformaticaPolitecnico di Torino
Società Italiana Docenti e Ricercatori in Automatica, 2008
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Outline
1 IntroduzioneMotivazioniStato dell’arteProblema considerato
2 Algoritmo
3 Test
4 Conclusioni e lavori futuri
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Outline
1 IntroduzioneMotivazioniStato dell’arteProblema considerato
2 Algoritmo
3 Test
4 Conclusioni e lavori futuri
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
sempre necessaria;squadre di robot utilizzate per:
sorveglianzamonitoraggio
sfruttare la squadra anche per la localizzazione
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
sempre necessaria;squadre di robot utilizzate per:
sorveglianzamonitoraggio
sfruttare la squadra anche per la localizzazione
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
sempre necessaria;squadre di robot utilizzate per:
sorveglianzamonitoraggio
sfruttare la squadra anche per la localizzazione
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
sempre necessaria;squadre di robot utilizzate per:
sorveglianzamonitoraggio
sfruttare la squadra anche per la localizzazione
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
sempre necessaria;squadre di robot utilizzate per:
sorveglianzamonitoraggio
sfruttare la squadra anche per la localizzazione
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Outline
1 IntroduzioneMotivazioniStato dell’arteProblema considerato
2 Algoritmo
3 Test
4 Conclusioni e lavori futuri
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Approcci
Tutti si basano su filtri bayesianiI più comuni:
Extended Kalman Filters (EKF)Monte Carlo Localization (MCL)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Approcci
Tutti si basano su filtri bayesianiI più comuni:
Extended Kalman Filters (EKF)Monte Carlo Localization (MCL)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Approcci
Tutti si basano su filtri bayesianiI più comuni:
Extended Kalman Filters (EKF)Monte Carlo Localization (MCL)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Approcci
Tutti si basano su filtri bayesianiI più comuni:
Extended Kalman Filters (EKF)Monte Carlo Localization (MCL)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
Due sotto-problemi:localizzazione globale
problema: rover in un ambiente simmetrico
position tracking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
Due sotto-problemi:localizzazione globale
problema: rover in un ambiente simmetrico
position tracking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
Due sotto-problemi:localizzazione globale
problema: rover in un ambiente simmetrico
position tracking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Localizzazione
Due sotto-problemi:localizzazione globale
problema: rover in un ambiente simmetrico
position tracking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Outline
1 IntroduzioneMotivazioniStato dell’arteProblema considerato
2 Algoritmo
3 Test
4 Conclusioni e lavori futuri
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
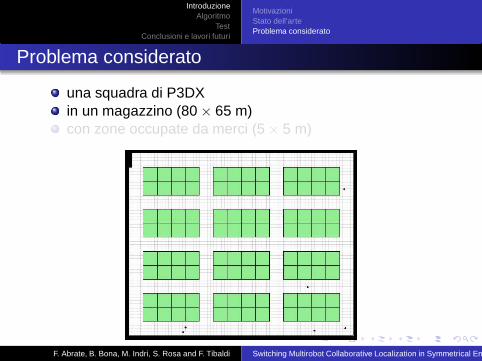
Problema considerato
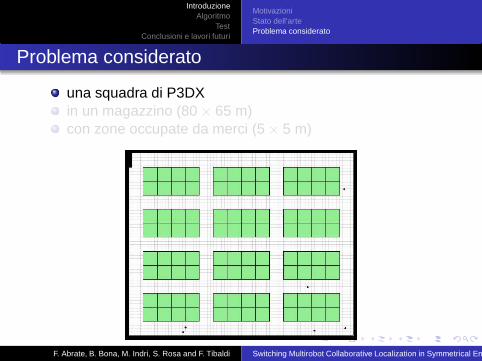
una squadra di P3DXin un magazzino (80 × 65 m)con zone occupate da merci (5 × 5 m)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Problema considerato
una squadra di P3DXin un magazzino (80 × 65 m)con zone occupate da merci (5 × 5 m)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Problema considerato
una squadra di P3DXin un magazzino (80 × 65 m)con zone occupate da merci (5 × 5 m)
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
MotivazioniStato dell’arteProblema considerato
Caratteristiche dei rover
Ogni rover ha in dotazione:sonarodometrialaser scannerconnessione Wi-Fitelecamerabussola
telecamera + laser scanner → posizione altri robotWi-fi consente di
1 trasmettere la posizione dei robot visti2 ricevere la propria posizione dagli altri robot
bussola per la stima
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
The Switching Multirobot Collaborative Localization(SMCL)
SMCL esegue1 localizzazione globale2 errore di localizzazione < soglia1 → position tracking3 errore di localizzazione > soglia2 → localizzazione globale
entrambi utilizzano particle filter
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
The Switching Multirobot Collaborative Localization(SMCL)
SMCL esegue1 localizzazione globale2 errore di localizzazione < soglia1 → position tracking3 errore di localizzazione > soglia2 → localizzazione globale
entrambi utilizzano particle filter
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
The Switching Multirobot Collaborative Localization(SMCL)
SMCL esegue1 localizzazione globale2 errore di localizzazione < soglia1 → position tracking3 errore di localizzazione > soglia2 → localizzazione globale
entrambi utilizzano particle filter
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
The Switching Multirobot Collaborative Localization(SMCL)
SMCL esegue1 localizzazione globale2 errore di localizzazione < soglia1 → position tracking3 errore di localizzazione > soglia2 → localizzazione globale
entrambi utilizzano particle filter
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
The Switching Multirobot Collaborative Localization(SMCL)
SMCL esegue1 localizzazione globale2 errore di localizzazione < soglia1 → position tracking3 errore di localizzazione > soglia2 → localizzazione globale
entrambi utilizzano particle filter
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale
algoritmo “classico” AMCL1 predizione (motion model)2 aggiornamento (sensor model)
resampling:nessuna posizione stimata ricevuta ⇒ Kullaback-LeiblerDivergence (KLD) resampling
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale
algoritmo “classico” AMCL1 predizione (motion model)2 aggiornamento (sensor model)
resampling:nessuna posizione stimata ricevuta ⇒ Kullaback-LeiblerDivergence (KLD) resampling
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale
algoritmo “classico” AMCL1 predizione (motion model)2 aggiornamento (sensor model)
resampling:nessuna posizione stimata ricevuta ⇒ Kullaback-LeiblerDivergence (KLD) resampling
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale
algoritmo “classico” AMCL1 predizione (motion model)2 aggiornamento (sensor model)
resampling:nessuna posizione stimata ricevuta ⇒ Kullaback-LeiblerDivergence (KLD) resampling
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale
algoritmo “classico” AMCL1 predizione (motion model)2 aggiornamento (sensor model)
resampling:nessuna posizione stimata ricevuta ⇒ Kullaback-LeiblerDivergence (KLD) resampling
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Localizzazione globale (2)
Resampling se il rover riceve delle posizioni stimate:
eliminare le ambiguità (simmetria)KLD modificato:
due sottoinsiemi di particelle:1 resampling “classico”2 distribuite attorno alle stime ricevute
N.B. sono posizioni non posedistribuite con assetto casuale (±π)
Density-Tree clustering sempre eseguito
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Globale → locale
Media temporale (µ)sulle distanza tra
1 proprie stime (clustering)2 stime ricevute
se µ < soglia1 ⇒ position traking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Globale → locale
Media temporale (µ)sulle distanza tra
1 proprie stime (clustering)2 stime ricevute
se µ < soglia1 ⇒ position traking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Globale → locale
Media temporale (µ)sulle distanza tra
1 proprie stime (clustering)2 stime ricevute
se µ < soglia1 ⇒ position traking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Globale → locale
Media temporale (µ)sulle distanza tra
1 proprie stime (clustering)2 stime ricevute
se µ < soglia1 ⇒ position traking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Globale → locale
Media temporale (µ)sulle distanza tra
1 proprie stime (clustering)2 stime ricevute
se µ < soglia1 ⇒ position traking
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Locale → globale
stesso approccio
cambia la soglia (isteresi)
se µ > soglia2 ⇒ localizzazione globale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Locale → globale
stesso approccio
cambia la soglia (isteresi)
se µ > soglia2 ⇒ localizzazione globale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Locale → globale
stesso approccio
cambia la soglia (isteresi)
se µ > soglia2 ⇒ localizzazione globale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Simulazione
Simulazione:deus ex machina
conoscenza totale dello stato di ogni robot
posa SMCL vs posa vera
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Simulazione
Simulazione:deus ex machina
conoscenza totale dello stato di ogni robot
posa SMCL vs posa vera
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Simulazione
Simulazione:deus ex machina
conoscenza totale dello stato di ogni robot
posa SMCL vs posa vera
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 1 (1)
6 rover
“liberi”goal:
tempo medio di localizzazione della squadratempo passaggio stabile globale → locale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 1 (1)
6 rover
“liberi”goal:
tempo medio di localizzazione della squadratempo passaggio stabile globale → locale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 1 (1)
6 rover
“liberi”goal:
tempo medio di localizzazione della squadratempo passaggio stabile globale → locale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 1 (1)
6 rover
“liberi”goal:
tempo medio di localizzazione della squadratempo passaggio stabile globale → locale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 1 (1)
6 rover
“liberi”goal:
tempo medio di localizzazione della squadratempo passaggio stabile globale → locale
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 1 (2)
0 200 400 600 800 1000 1200 1400 16000
20
40
60
80
100
120
Position error
t [s]
exp1
_y_l
abel
_ax1
0 200 400 600 800 1000 1200 1400 1600−4
−3
−2
−1
0
1
2
3
4
Heading error
t [s]
exp1
_y_l
abel
_ax2
p3dx1
p3dx2
p3dx3
p3dx4
p3dx5
p3dx6
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 2 (1)
6 rover
“liberi”goal:
robustezza SMCLandamento dell’errore medio
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 2 (1)
6 rover
“liberi”goal:
robustezza SMCLandamento dell’errore medio
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 2 (1)
6 rover
“liberi”goal:
robustezza SMCLandamento dell’errore medio
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 2 (1)
6 rover
“liberi”goal:
robustezza SMCLandamento dell’errore medio
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 2 (1)
6 rover
“liberi”goal:
robustezza SMCLandamento dell’errore medio
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
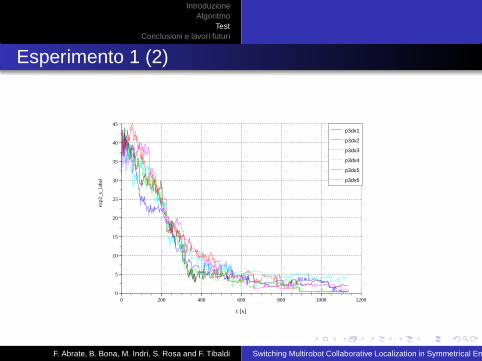
Esperimento 1 (2)
0 200 400 600 800 1000 12000
5
10
15
20
25
30
35
40
45
t [s]
exp2
_y_l
abel
p3dx1
p3dx2
p3dx3
p3dx4
p3dx5
p3dx6
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 3 (1)
6 rover
“liberi”goal:
SMCL vs kidnappingtempo di recupero dell’errore
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 3 (1)
6 rover
“liberi”goal:
SMCL vs kidnappingtempo di recupero dell’errore
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 3 (1)
6 rover
“liberi”goal:
SMCL vs kidnappingtempo di recupero dell’errore
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 3 (1)
6 rover
“liberi”goal:
SMCL vs kidnappingtempo di recupero dell’errore
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 3 (1)
6 rover
“liberi”goal:
SMCL vs kidnappingtempo di recupero dell’errore
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
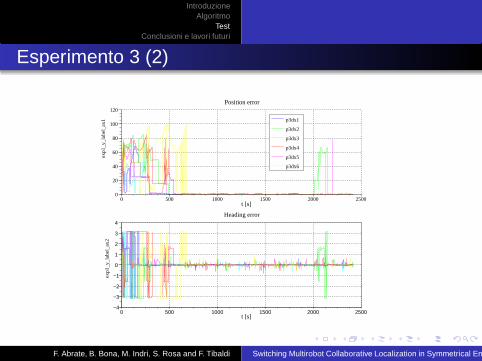
Esperimento 3 (2)
0 500 1000 1500 2000 25000
20
40
60
80
100
120
Position error
t [s]
exp1
_y_l
abel
_ax1
0 500 1000 1500 2000 2500−4
−3
−2
−1
0
1
2
3
4
Heading error
t [s]
exp1
_y_l
abel
_ax2
p3dx1
p3dx2
p3dx3
p3dx4
p3dx5
p3dx6
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 4 (1)
da 2 a 9 rover
“liberi”goal:
come SMCL rispetto al numero di rover
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 4 (1)
da 2 a 9 rover
“liberi”goal:
come SMCL rispetto al numero di rover
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 4 (1)
da 2 a 9 rover
“liberi”goal:
come SMCL rispetto al numero di rover
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 4 (1)
da 2 a 9 rover
“liberi”goal:
come SMCL rispetto al numero di rover
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Esperimento 4 (2)
0 200 400 600 800 1000 12000
5
10
15
20
25
30
35
40
45
50
t [s]
exp4
_y_l
abel
2 rovers
3 rovers
6 rovers
9 rovers
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Conclusioni
SMCL consente al rover di localizzarsiin un ambiente simmetrico
senza modifiche ad-hoc dell’ambiente o a landmark
insensibile alla posa di partenzaformazione della squadra arbitraria
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments

IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Conclusioni
SMCL consente al rover di localizzarsiin un ambiente simmetrico
senza modifiche ad-hoc dell’ambiente o a landmark
insensibile alla posa di partenzaformazione della squadra arbitraria
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Conclusioni
SMCL consente al rover di localizzarsiin un ambiente simmetrico
senza modifiche ad-hoc dell’ambiente o a landmark
insensibile alla posa di partenzaformazione della squadra arbitraria
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Conclusioni
SMCL consente al rover di localizzarsiin un ambiente simmetrico
senza modifiche ad-hoc dell’ambiente o a landmark
insensibile alla posa di partenzaformazione della squadra arbitraria
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Conclusioni
SMCL consente al rover di localizzarsiin un ambiente simmetrico
senza modifiche ad-hoc dell’ambiente o a landmark
insensibile alla posa di partenzaformazione della squadra arbitraria
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Lavori futuri
implementazione reale
affinare gli stati
ambiente variabile
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Lavori futuri
implementazione reale
affinare gli stati
ambiente variabile
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
Lavori futuri
implementazione reale
affinare gli stati
ambiente variabile
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments
IntroduzioneAlgoritmo
TestConclusioni e lavori futuri
DOMANDE?
F. Abrate, B. Bona, M. Indri, S. Rosa and F. Tibaldi Switching Multirobot Collaborative Localization in Symmetrical Environments