Embed Size (px)
Citation preview

Swinburne University of
Technology
Doctoral Thesis
Dissipation
in
Oscillating Water Columns
Author:
Md Kamrul Hasan
Supervisors:
A/Prof Richard Manasseh
Dr Justin Leontini
A/Prof Alessandro Toffoli
Prof Alexander Babanin
April 23, 2017


Abstract
The Oscillating Water Column (OWC), regarded as the first generation Wave
Energy Converter (WEC), is one of the most effective technologies for extraction
of ocean wave energy. Most OWCs are designed to resonate at incoming wave
frequencies, so that efficiency of the device would be the maximum. In practice,
the eigenperiod of OWCs is too small with respect to most energetic waves, owing
to practicalities of construction and deployment, so the theoretical maximum is not
attained. Moreover, the damping factors, which control the actual value of this
maximum, are not clearly identified and modelled. Therefore, an extensive study of
the internal fluid dynamics of an OWC is required to identify those damping factors,
and furthermore, to estimate the amount of energy loss due to their presence in
OWCs.
Analytic models incorporating viscous and turbulent boundary-layer dissipation
in a fixed-type OWC are derived from the Navier-Stokes equations. The OWC is
modelled as a partially submerged straight circular cross-section pipe. The origin of
the dissipation terms in the momentum conservation equations are explicitly iden-
tified. The contributions of different damping sources to the overall energy loss are
compared. As a first approximation, the flow inside the device is assumed fully devel-
oped along the entire length, to eliminate the effect of the flow development region.
The Power-Take-Off (PTO) system is modelled assuming that the air compresses
and expands isentropically in the air chamber. Theory developed in [1] for comput-
ing the hydrodynamic coefficients related to the scattered wave and radiation wave
is adapted into the present models. A novel contribution of the present work is the
inclusion of damping due to the wall shear stress, modelled for the reciprocating flow
system inside the OWC. It is found that damping due to the radiation wave is the
largest damping source if the draft (submergence depth) of the device is relatively
short. However, with the increase of the draft, radiation damping becomes weaker.
Conversely, the wall shear stress damping becomes stronger with the increase of the
draft.
For the analytical study, it is assumed that the flow is fully developed throughout
the device. However, in reality, there is a significant flow development region in a
typical OWC. Unlike unidirectional flow, there is no established correlation between
the Reynolds number and the flow developing length in reciprocating flow. Thus
a numerical study is conducted with a Direct Numerical Simulation (DNS) code
to investigate the flow developing length in reciprocating pipe flow. It is found
that the developing length varies periodically in the cycle. Linear correlations are
presented to estimate the maximum and cycle-average developing lengths ((le)max
and (le)mean) from the Reynolds number Reδ = U0δ/ν, where U0 = cross-sectional
mean velocity amplitude and δ =√
2ν/ω = Stokes layer thickness.
It is confirmed that the developing length in reciprocating pipe flow is not in-
significant. Hence, an approach is taken to measure the energy loss due to the
free-end in a pipe with the same DNS code which has been used to measure the
developing length. It is found that in a long pipe, the loss owing to the internal
shear stress dominates over the free-end loss. However, as the pipe gets shorter, the
domination of internal shear stress loss decreases and the portion of the free-end loss
in the overall loss increases. It is shown that for a 5-diameter long pipe if Reδ > 80,
the free-end loss dominates over the internal shear stress loss. Vortex formation due
to the free-end and its corresponding energy dissipation field are visualised. It is
found that within a few diameters downstream from the free-end the vortices be-
come so weak that the dissipation caused by the vortices far outside the free-end is
insignificant.
Finally, analytical models for a fixed-type tuned Oscillating Water Column (OWC)
device are derived. This is an example of an application of the research in the fore-
going Chapters. A variable volume air-compression chamber is used as the tuning
system. The shear stress and radiation damping terms in the equations of motion
are modelled in a similar manner to the single column OWC mentioned above. The

free-end damping term is incorporated from the DNS study. It is found that the
introduction of free-end damping reduces the overall power output of the device
significantly.


To those, who born poor, live poor, and die poor.


Acknowledgements
I would like to express my sincere gratitude to my supervisor, A/Prof. Richard
Manasseh, for his guidance, teaching, time, and above all for being patient and
very nice to me throughout the period of my study. Whenever I was stuck, his
motivational words inspired me to overcome the difficulties, rather than just giving
up. I also would like to express my deep gratitude to another supervisor, Dr Justin
Leontini, for his time, friendly teaching, and never ending inspiration. I barely
know any supervisor like him who tries to manage time for his students almost
everyday, depending on their needs. I would like to thank my family members for
their constant supports, even though they were 8903 km away from me. Finally, I
am very grateful to all my friends who were always supportive to me to complete
this study.

Declaration of Authorship
This thesis contains no material which has been accepted for the award of any other
degree or diploma. To the best of my knowledge, this thesis contains no material
previously published or written by another person except where due reference is
made in the text.
Signed:
Date:


Contents
1 Introduction 1
2 Literature Review 8
2.1 Background of OWCs . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Theoretical modelling of OWCs . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Performance evaluation of OWCs . . . . . . . . . . . . . . . . 12
2.2.2 Tuning mechanisms of OWC devices . . . . . . . . . . . . . . 16
2.3 Reciprocating pipe flow . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3.1 Flow characteristics and transition from laminar to turbulent . 21
2.3.2 Entrance length . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3.3 Energy loss due to shear stress and entrance effects . . . . . . 30
3 Analytic representations of dissipation in OWCs 37
3.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.1.1 Simplifying the x-momentum equation of the water column . . 41
3.1.2 Modelling the wall shear stress, τw(t) in the reciprocating flow
system of the OWC . . . . . . . . . . . . . . . . . . . . . . . . 44
3.1.3 Modelling the Power-Take-Off (PTO) . . . . . . . . . . . . . . 47
3.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4 Entrance length in laminar reciprocating pipe flow 57
4.1 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.2 Measuring the entrance length . . . . . . . . . . . . . . . . . . . . . . 62
i

4.2.1 Measuring techniques . . . . . . . . . . . . . . . . . . . . . . . 64
4.2.2 Comparing the measurement techniques . . . . . . . . . . . . 66
4.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5 Dissipation due to a free-end in reciprocating pipe flow 75
5.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.2 Validation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
5.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
5.3.1 Energy loss in the entire domain, ˙Eew . . . . . . . . . . . . . . 85
5.3.2 Energy loss due to a fully developed flow throughout the pipe,
˙Ew . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
5.3.3 Energy loss due to the free-end, ˙Ee . . . . . . . . . . . . . . . 86
5.3.4 Energy loss outside the pipe due to the free-end, ˙Eeo . . . . . 89
5.3.5 Vorticity and energy dissipation fields around the free-end . . 91
5.3.6 Comparison between ˙Ew and ˙Ee for different pipe
lengths . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
5.3.7 The total dissipation ˙Eew as a function of A0 at low and high α′ 95
5.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
6 Analytical models of a tuned Oscillating Water Column 97
6.1 Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
6.1.1 Mass and momentum conservation equations for the water
columns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
6.1.2 Simplifying the x-momentum equation of the water columns . 100
6.1.3 Equation of motion for the water columns . . . . . . . . . . . 102
6.1.4 Modelling the pressure in the air-compression chamber, pd and
pe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6.1.5 Modelling the entrance pressure, pc . . . . . . . . . . . . . . . 104
6.1.6 Including the damping due to the free-end of the OWC . . . . 105
ii

6.1.7 Modelling the wall shear stress, τw in the reciprocating flow
system of the OWC . . . . . . . . . . . . . . . . . . . . . . . . 106
6.1.8 Modelling the Power-Take-Off (PTO) . . . . . . . . . . . . . . 108
6.1.9 Summary of the governing equations . . . . . . . . . . . . . . 108
6.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
7 Conclusion 112
Appendices 115
A Dimensionless governing equations for OWC 116
A.1 Reynolds-Averaged Navier-Stokes (RANS) equations . . . . . . . . . 116
A.1.1 RANS equations for the water column in OWC . . . . . . . . 119
A.1.2 RANS equations for the air-compression chamber . . . . . . . 121
A.1.3 Dimensionless shear stress tensor, τij in cylindrical coordinate
system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
A.2 Linearizing the pressure in the air-compression chamber, pg . . . . . . 125
B Modelling the pressure from the incident and radiative waves, pd(t)
and pr(t) 126
B.1 Computing q∗s and q∗r from [1] . . . . . . . . . . . . . . . . . . . . . . 127
B.2 Deriving the driving pressure, pd(t) and the radiation induced pres-
sure, pr(t) from q∗s and q∗r . . . . . . . . . . . . . . . . . . . . . . . . . 128
C Direct Numerical Simulation (DNS) code description 132
References 134
iii

List of Figures
1.1 Fixed structure OWC. . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Floating type OWC. . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Courtney’s Whistling Buoy [2]. . . . . . . . . . . . . . . . . . . . . . 9
2.2 Schematic diagram of the seawater pump [3]. . . . . . . . . . . . . . . 17
2.3 Possible implementation of a parametric excitation of an OWC. The
volume of the air-compression chamber is changed by the action of
the piston and the valve [4]. . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Breakwater embodying OWC; (a) single column OWC, (b) U-OWC
[5]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 Schematic of experimental set-up of [6], where 1. Test pipe; 2. bel-
lows; 3. structure; 4. strain gage; 5. crank mechanism. . . . . . . . . 23
2.6 A schematic diagram of the experimental set-up used in [7]. Dimen-
sions in mm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.7 Traces of velocity variation at Reδ = 1530(Reos = 5830) and λ = 1.91
[7]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.8 Stability diagrams: Reos vs. λ (left) and Reδ vs. λ (Right). ◦, laminar
or distorted laminar flows; •, weakly turbulent flow; •+, conditionally
turbulent flow [7]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.9 Schematic diagram of the experimental set-up used in [8]. . . . . . . . 27
2.10 Phase variation of the ensemble-averaged axial velocity compared to
laminar flow theory (Reδ = 1080, α = 15) [9]. . . . . . . . . . . . . . . 28
iv

2.11 Dimensionless velocity as a function of dimension length from the
entry [10]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.12 Schematic diagram of eddy formation at the tube entrance due to free
oscillation of water column [11]. . . . . . . . . . . . . . . . . . . . . . 32
2.13 Phase variation of the wall-frictn velocity calculated by various meth-
ods: —, expression (2); ooo, −ν∂u/∂r|r=R; ....., u′v′ at y/R = 0.1;−•
−, laminar theory or quasi steady turbulence correlation [9]. . . . . . 35
3.1 A schematic of an OWC showing it consists of a vertical hollow cylin-
der with one end immersed, and a turbine at the top. . . . . . . . . . 38
3.2 Schematic of the OWC duct device . . . . . . . . . . . . . . . . . . . 42
3.3 Schematic illustration of velocity at different phases in a conditionally
turbulent flow system of OWC . . . . . . . . . . . . . . . . . . . . . . 44
3.4 Average dimensionless power against dimensionless parameter Kh for
different damping models: , RD; , RD+CT; ,
RD+TB. As an example, if the water depth h = 10 m, significant
wave height hs = 2 m, for the parameters of ω = 1.34 rad/s and
D = 1.5 m, the dimensional power in kW would be obtained by
multiplying Pavg by (ρwgωD4)/1000 = 66.55. . . . . . . . . . . . . . . 50
3.5 Damping coefficients as a function of Kh for lc/h = 0.5 and D/h =
0.15: , βrd; , βtb. . . . . . . . . . . . . . . . . . . . . . . 50
3.6 Energy loss due to wall shear stress (a) at different lc/h forD/h = 0.15
(b) at different D/h for lc/h = 0.5. ◦ , RD+CT; • , RD+TB. 51
3.7 Average dimensionless power calculated for the RD+TB model as a
function of (a) Kh and lc/h for D/h = 0.15, and (b) Kh and D/h
for lc/h = 0.5. The dashed line represents the position of the peak at
resonance if the water column works as a solid-body. . . . . . . . . . 52
3.8 (a) Radiation damping coefficient and (b) wall shear stress damp-
ing coefficient in the turbulent flow as a function of Kh for lc/h =
0.2, 0.5, 0.8 and D/h = 0.15. . . . . . . . . . . . . . . . . . . . . . . . 53
v
3.9 (a) Radiation damping coefficient and (b) wall shear stress damping
coefficient in the turbulent flow as a function of Kh for lc/h = 0.5
and D/h = 0.15, 0.3, 0.6. . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.10 The amplitude of the driving pressure as a function of (a) Kh for
lc/h = 0.2, 0.5, 0.8; D/h = 0.15 and (b) Kh for D/h = 0.15, 0.3, 0.6;
lc/h = 0.5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.11 Average dimensionless power extracted from an OWC of lc/h = 0.5
and D/h = 0.15, as a function of Kh and hs/h for the RD+TB model.
For example, if the water depth h = 10 m and the significant wave
height hs = 3 m, at resonance (ω = 1.34 rad/s) a device of lc = 5 m
and D = 1.5 m can extract Pavg × ρwgωD4/1000 ≈ 0.3× 66.55 ≈ 20
kW power. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.1 Schematic diagram of the geometry. . . . . . . . . . . . . . . . . . . . 60
4.2 Comparison between theoretical results (•) and simulation results (—
) of the velocity profiles in fully developed flow for (a) α′ = 4α2 = 50,
A0 = 3; (b) α′ = 400, A0 = 3. . . . . . . . . . . . . . . . . . . . . . . 61
4.3 Time history of the centreline velocity (uc) at the pipe entrance (◦)
and at the fully developed region (•) for α′ = 400 and A0 = 3. . . . . 62
4.4 Evolution of velocity profile along the pipe, at different phases of the
cycle for α′ = 400 and A0 = 3. . . . . . . . . . . . . . . . . . . . . . 63
4.5 Contours of (a) ∂u/∂r|w and (b) uc for α′ = 400 and A0 = 3, as a
function of the distance from the entrance (x) and the phase variation
φ; the symbols (•) show the location where (∂u/∂r|w)∞− ∂u/∂r|w =
0.01 and (uc)∞ − uc = 0.01 on the corresponding plots. . . . . . . . . 64
4.6 Contours of (a) ∂u/∂r|w and (b) uc for α′ = 400 and A0 = 3, as a
function of the distance from the entrance (x) and the phase variation
φ; the symbols (•) show the location where ∂(∂u/∂r|w)/∂x = 0.01 and
∂uc/∂x = 0.01 on the corresponding plots. . . . . . . . . . . . . . . . 65
vi

4.7 Maximum entrance length of the cycle, measured using (a) Method 1,
(b) Method 2; and the cycle-average entrance length measured using
(c) Method 1, (d) Method 2, as a function of α′, for A0 = 3. . . . . . 66
4.8 Maximum entrance length of the cycle measured using (a) Method 1,
(b) Method 2; and the cycle-average entrance length measured using
(c) Method 1, (d) Method 2, as a function of A0, for α′ = 400. . . . . 67
4.9 Maximum entrance length to diameter ratio as a function of α′ at
different A0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.10 Maximum entrance length to diameter ratio as a function of A0 for
α′ = 50, × ; α′ = 100, • ; α′ = 200, + ; and α′ = 400,
◦ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.11 Maximum entrance length to Stokes-layer thickness ratio as a function
of Reδ for the range α′ from 100 to 400 and A0 from 1 to 9. The
straight line represents the correlation (le)max/δ = 1.37Reδ + 5.3. . . . 70
4.12 Cycle-average entrance length to diameter ratio as a function of α′ at
different A0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.13 Cycle-average entrance length to diameter ratio as a function of A0
for α′ = 50, × ; α′ = 100, • ; α′ = 200, + ; and α′ = 400,
◦ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.14 Cycle-average entrance length to Stokes-layer thickness ratio as a
function of Reδ for the range α′ from 200 to 400 and A0 from 1 to 9.
The straight line represents the correlation (le)mean/δ = 0.82Reδ + 2.16. 72
5.1 Flow at the free-ends of a protruded pipe. . . . . . . . . . . . . . . . 75
5.2 Schematic diagram of the geometry. . . . . . . . . . . . . . . . . . . . 80
5.3 Control volume to investigate the free-end loss. . . . . . . . . . . . . 80
5.4 Comparison of cycle-average domain dissipation ˙Eew, computed by
the left side (◦) and right side (•) of equation (5.14); (a) as a function
of α′= 4α2, and (b) as a function of A0. . . . . . . . . . . . . . . . . . 82
vii

5.5 Comparison between theoretical results (◦) and simulation results (•)
of (a) wall friction coefficient Cf and (b) domain energy dissipation
˙Eew, as a function of α′ = 4α2 for A0 = 3. . . . . . . . . . . . . . . . 84
5.6 Cycle-average energy dissipation in the entire domain, ˙Eew; (a) as a
function of α′, (b) as a function of A0, (c) as a function of 1/(A0α′)
and (d) as a function of 1/(A0α′0.75). The straight dashed line in (d)
represents the correlation ˙Eew = 291.05/(A0α′0.75) + 0.035. . . . . . . 85
5.7 Cycle-average energy dissipation inside the pipe due to shear stress
assuming fully developed flow, ˙Ew; (a) as a function of α′, (b) as a
function of A0, (c) as a function of 1/(A0α′) and (d) as a function
of 1/(A0α′0.75). (e) The percentage contribution of ˙Ew in ˙Eew as a
function of 1/(A0α′0.5). The straight dashed line in (d) represents the
correlation ˙Ew = 276.15/(A0α′0.75) + 0.02. . . . . . . . . . . . . . . . 87
5.8 Cycle-average energy dissipation due to the free-end, ˙Ee; (a) as a
function of α′, (b) as a function of A0, (c) as a function of 1/(A0α′),
(d) as a function of 1/(A0.330 α′) and (e) as a function of 1/(A0.33
0 α′) for
A0 > 1. (f ) The percentage contribution of ˙Ee in ˙Eew as a function
of 1/(A0α′0.5). The dashed line in (d) represents the correlation ˙Ee =
1/[1 + 1.16(A0.330 α′)0.33]. . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.9 Cycle-average energy dissipation outside the pipe due to the free-end,
˙Eeo; (a) as a function of α′, (b) as a function of A0, (c) as a function
of 1/(A0α′) and (d) as a function of 1/(A0.33
0 α′). (e) The percentage
contribution of Eeo in ˙Eew as a function of 1/(A0α′0.33). The dashed
line in (d) represents the correlation ˙Eeo = 1/[1 + 0.74(A0.330 α′)0.45]. . 90
5.10 Contours of vorticity (left) and energy dissipation (right) at the free-
end, for α′ = 400 and A0 = 3, at various oscillation phases φ. Red and
blue colours on the vorticity contour represent positive and negative
vortices respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
viii
5.11 Comparison between the contribution of dissipations from the wall
shear stress (assuming fully developed flow) ˙Ew and from the free-
end ˙Ee to the overall domain dissipation ˙Eew as a function of 1/Reδ
for different pipe lengths. . . . . . . . . . . . . . . . . . . . . . . . . . 94
5.12 Cycle-average total dissipation ˙Eew in a domain with a 2.3-diameter
long pipe (to match the length of the pipe of [12]), as a function of
A0 at low α′ (from simulation) and at high α′ (from experiment [12]). 95
6.1 OWC with an air-compression chamber; (a) Schematic diagram, (b)
Water (green) and air (grey) zones in the device. . . . . . . . . . . . . 98
6.2 Dimensions of the OWC device. . . . . . . . . . . . . . . . . . . . . . 101
6.3 Average dimensionless power against dimensionless parameter Kh for
different damping : —, radiation (βrd); —, radiation and turbulent
(βrd + βtb) and —, radiation, turbulent and free-end (βrd + βtb + βfe). 110
ix

Chapter 1
Introduction
The traditional methods of energy production from the nuclear and fossil fuel have
become a serious threat to the environment due to their contributions in global
warming, air pollution, acid precipitation, ozone depletion, forest destruction, and
emission of radioactive substances [13]. Additionally, these energy resources are
limited in nature. Thus the global trend is shifting towards safer, cleaner and
renewable energy generation schemes. The contribution of hydro-power, solar and
wind energy to the world energy demand is well appreciated. However, there is
another very promising and vast renewable energy resource which has been remained
unharnessed; that is ocean wave energy. The wave energy in the ocean did not get
much attention until the oil-crisis of 1973 [14]. After that incidence, the demand
for harnessing new renewable energy sources has been encouraging governments and
industries to focus on the ocean wave energy. One of the most attractive features of
the ocean waves is that they have very high energy flux, in fact the highest among
the other renewable sources [15]. Another attractive characteristic of the ocean wave
is that once it is created, it can travel very long distances with very low energy loss.
Furthermore, unlike the solar or wind energy sources, the energy that is carried by
the ocean waves is nearly independent of the local weather. It is estimated that wave
energy has a lower variability with respect to wind energy (for example it is only
one-third of the variability of wind energy in Australia [16]). Another estimation
shows that the total wave energy that is available in the world’s ocean is of the same
1

order of magnitude of the world’s total electricity consumption [17]. Although it is
only possible to exploit 10− 20% of this energy resource [18], the potential of ocean
wave energy to contribute to human energy demand is clearly very significant.
Technologies to extract energy from the renewable energy sources like the sun,
wind and hydro head are well established and have been using successfully for the
past few decades; in the case of wind power, for centuries; and for hydroelectricity, a
century. However, to extract energy from ocean waves many different types of Wave
Energy Converters (WECs) have been proposed. Although some WECs reached
the prototype level and are successfully operating in different coastal areas of the
world, significant development is still required to make the WECs competitive with
other renewable energy converters [14]. More than a thousand patents for WECs
had been registered in Japan, North America and Europe by 1980 [19], and new
ideas are coming up every year. Recent reviews on WECs found that around one
hundred development projects are going on at different places in the world [14].
WECs are generally classified based on their location (i.e. offshore or onshore),
size (i.e. point absorber or large absorber) and working principle. Based on the
working principle WECs were categorised in three types; Oscillating Water Columns
(OWCs), Oscillating Bodies and Overtopping devices [14].
Among the different types of WECs, the OWC is considered one of the most
promising technologies owing to its ease of construction, few moving parts, easy
(a) Prototype OWC [20]. (b) Schematic of the OWC [21].
Figure 1.1. Fixed structure OWC.
2

(a) Prototype OWC [22]. (b) Schematic of the OWC [23].
Figure 1.2. Floating type OWC.
maintenance and high reliability [2]. There are two types of OWCs; the fixed struc-
ture OWCs (Figure 1.1), usually located on the shoreline or near shore, and the
floating type OWCs (Figure 1.2). The fixed structure OWCs are also known as
the first generation devices. OWCs are basically comprised of a partly submerged
structure which is open below the water surface, is called the collector chamber, an
air chamber above the water surface and the Power Take Off (PTO) mechanism as
shown in Figure 1.1(b) and 1.2(b). The air-water interface in the collector chamber
oscillates owing to the rising and falling of the waves in the sea. As the air-water in-
terface moves up, the air in the air-chamber is pushed out through a turbine which
is mounted at the top of the air-chamber. As the interface moves down, the air
from the outside is pulled in through the turbine. The axial-flow Wells turbine and
the impulse turbine with guided vanes are most commonly used turbines in OWC
plants. These turbines are designed in such a way that they rotate in one direction
regardless of the direction of the air flow.
An OWC can extract the maximum amount of power when the device natural
frequency coincides with the incoming wave frequency; i.e. the system resonates.
The device could extract enormous amounts of energy at resonance, unless the
damping is significant. Therefore, the damping factors in the device play a major
role in controlling the overall efficiency of the system. In principle, the optimum
3

power is extracted by a fixed-type OWC (where the duct is considered fixed relative
to the ocean floor) operating with linear dynamics when it resonates and the rate
of useful energy absorption is equal to the rate of damping [24].
The basic working principle of an OWC is like a forced mass-spring-damping
system, where the water column represents the mass, and the body force on it
(due to gravity) plays the role of the spring restoring force. The damping, which
is the primary focus of this study, consists of different terms representing different
mechanisms of energy loss as the OWC operates.
These mechanisms include the wall shear stress. Boundary layers introduce vis-
cous and turbulent dissipation causing a loss of energy. A second mechanism is
radiative waves, in which pressure fluctuation in the air chamber causes a secondary
wave to radiate away some energy. The third mechanism is the PTO system. A
significant amount of damping comes from the PTO system, which is, in general,
a turbine-generator arrangement and this, of course, represents the useful power
extracted from waves. Finally, vortex formation at the submerged end of the pipe
dissipates a significant amount of energy. Furthermore, if the device is sufficiently
wide, another mechanism is sloshing of the internal air-water interface, which also
causes damping.
The impact of these different damping factors on the overall power output has
not been rigorously studied. The focus of much analysis has been radiative damp-
ing, since this can be analysed by potential-flow theory. Theories on calculating
the radiation damping and hence estimating the efficiency of an OWC have been
thoroughly derived in [25, 26]. However, overall, true damping is one of the most im-
portant design prerequisites, required to estimate the total amount of energy loss.
Laboratory experiments have reported on energy losses in scale models of actual
devices [27]. Very few theoretical studies have incorporated the dissipation from
shear into models [12, 28]. Numerical studies on the internal flow dynamics of an
OWC using standard computational fluid dynamics packages which use turbulence
models, e.g. k-ε etc., may yield overall performance results, however it is not clear
4

that such turbulence models will perform with fidelity for high Reynolds number
reciprocating flow, for which there is very few data available (e.g. [29]) to validate
the models.
In Chapter 3 of the present work, a fluid-dynamical approach is taken to derive
the mass-spring-damping model of an OWC from the Navier-Stokes equations. In
order to examine the essential physics without undue complexity, a simple fixed-type
cylindrical OWC is considered. The radiation damping derived in [1] is adapted to
the present model after transforming to a rigid-body model as explained in [30].
Air in the air-chamber is considered compressible, though it is assumed that the air
pressure maintains a linear relationship with the mass flow rate through the turbine
(as in a Wells turbine model [31]).
The first-order flow created inside the OWC by ocean waves is reciprocating, i.e.
it is periodic and completely reverses direction. A novel contribution of the present
work is the inclusion of the resulting reciprocating shear stress, modelled based on
the theory developed in [32] and the Blasius correlation for steady turbulent flows in
smooth pipes, as justified in [9]. Flow inside the device is assumed fully-developed to
neglect the effect of the developing region and vortices at the entrance. A comparison
of overall power output is presented for different wall shear stress models.
Though the flow is considered fully-developed while deriving the analytical mod-
els of a simple OWC, in reality, there is developing length at the free-end of the
OWC. Unlike the unidirectional flow, there is no well established relationship be-
tween the Reynolds number and the developing length in reciprocating flow. Thus,
in Chapter 4 a numerical approach is taken to measure the developing length in
the reciprocating pipe flow. This is also a novel contribution of the present work.
A pipe with free-ends exiting to reservoirs is used for the investigation. The flow
rate at the inlets is driven sinusoidally with time, and equal and opposite at each
end. A structured mesh is used to run the simulations. The DNS code used in
this study uses a nodal-based spectral-element method to solve the incompressible
Navier-Stokes equations. It is assumed that the flow is axisymmetric throughout
5

the flow domain. Both the maximum developing length in a cycle and the cycle
averaged developing length are presented as a function of Reynolds number.
Once it is confirmed that the developing length in reciprocating pipe flow is not
negligible, the rate of energy loss within the developing region and the rate of loss
outside the pipe due to the free-end are measured and presented in Chapter 5. The
wall shear stress and free-end losses are measured separately in reciprocating pipe
flow to make a comparison between them. The DNS code which has been used in
Chapter 4 to measure the developing length, is used in this Chapter to measure the
energy loss. While measuring the free-end loss, first the energy dissipation due to
the wall shear stress inside the pipe is calculated assuming that the flow is fully-
developed through out the pipe. Then the wall shear stress loss is subtracted from
the entire flow domain loss. This enables incorporation of the measured free-end
loss into the analytical model in Chapter 3, since the analytical modelling has also
been done assuming a fully-developed flow in the pipe.
Finally, the preceding results are applied to a practical example of a new design.
The analytical models for a fixed-type tuned Oscillating Water Column (OWC) de-
vice are derived, incorporating the losses due to shear stress (viscous and turbulent),
radiation wave and the free-end in Chapter 6. It is expected that the OWCs will
resonate at the incident wave frequencies to ensure the maximum amount of power
extraction. This is possible when the natural frequency of the device coincides with
the incident wave frequency. However, the wave frequency varies within a significant
range. Therefore, to maintain the resonance condition, it may be beneficial to have a
tuning mechanism which will adjust the natural frequency of the device to the wave
frequency. Several tuning mechanisms have been proposed for fixed type OWCs,
such as a variable-volume air compression chamber in a seawater pump [28] and the
U-OWC device [33]. The present work incorporates the idea of a variable volume
air-compression chamber as the tuning system in an OWC. A comparison between
the power output before and after the inclusion of free-end damping is presented.
The aim of the present work is to incorporate all the most significant forms of
6

dissipation in an OWC into a simple, yet rigorous model that is useful for design.
One of the novel contributions of the present work is the inclusion of the resulting
reciprocating shear stress, modelled based on the theory developed in [32] and the
Blasius correlation for steady turbulent flows in smooth pipes, as justified in [9].
Other novel contributions are the estimation of the developing length in reciprocating
pipe flow, and then measurement of the energy loss in the development region, along
with the loss outside the pipe due to vortex formation.
7

Chapter 2
Literature Review
In this chapter, significant research that contributed and has potential to contribute
to developing the oscillating water column (OWC) are highlighted. Relevant lit-
erature are presented in three sections. In the first part, the history of develop-
ing prototype OWCs is given. Numerous works have been done on the analytical
modelling of OWCs; they are reported in the second part. This second part is fur-
ther divided into two subsections. In the first subsection, literature on analytical
modelling to evaluate the performance of OWCs are presented, such as the power
absorption efficiency from waves and power conversion efficiency. In the second sub-
section, different works on the tuning mechanism of OWCs are presented. Most
of the theoretical modelling of OWCs has been done by assuming an irrotational
flow inside the device. However, this assumption is valid when the viscous shear
stress is considered negligible. As discussed in Chapter 1, one of the main aims of
the present work is to include the viscous and turbulent shear stress in an analyt-
ical model of a fixed type near-shore OWC and to study the effect of these shear
stresses on the power extraction. Since the flow inside the device is reciprocating
(oscillatory flow with zero mean), the existing well-established shear stress model
for steady flow is not compatible with the equations of motion of OWCs. Therefore
literature on reciprocating flow are studied to understand the flow characteristics
and the contribution of viscous and turbulent shear stresses to energy dissipation.
These literature on bounded reciprocating flow are presented in the third part of
8

this chapter.
2.1 Background of OWCs
The earliest patent on wave energy converters was filed in 1799 in France, when
Pierre Girard and his son proposed a device to harness the power from waves [34].
The device was proposed to utilise the bobbing of moored ships to run heavy ma-
chinery ashore via a plank and fulcrum mechanism. Though the device was never
constructed, it inspired the engineers of the following generations to work in this
field. After almost a century, J. M. Courtney from New York patented a device,
known as the Whistling Buoy (Figure 2.1) which is considered as the earliest ap-
plication of an OWC [2]. It was an audible warning device, used for a navigation
aid.
Until 1940, numerous patents on wave energy converters had been registered.
Very few of them were successful in producing the expected amount of power. The
first electricity-generating OWC was built in the 1940s by Yoshio Masuda in Japan.
He developed a floating OWC by installing an impulse air turbine on a navigation
buoy. This buoy was sited in Osaka Bay and the generated electricity was using to
Figure 2.1. Courtney’s Whistling Buoy [2].
9

power navigation lights. From 1965, this device was commercialized in Japan and
later in the USA [14]. In 1976, Masuda led a team from the International Energy
Agency to test the performance of several OWC units mounted on a floating barge,
named Kaimei [2]. The dimension of that 800 tonne barge was 80×12 m and it was
placed at the coast of Yura, Tsuruoka City, Japan. These OWC units were equipped
with different air turbines such as the Wells turbine, McCormick turbine and some
other turbines with rectification valves. Eight OWC units were mounted on that
barge and each of them had the capacity of generating 125 kW power. This testing
program was sponsored by Japan, UK, Canada, Ireland and USA. It is possible
that the lack of sufficient theoretical knowledge on the wave energy absorption at
that early stage of OWC development caused the project not to be as successful as
expected [14].
Since 1975, several countries in Europe such as the UK, Norway, Portugal and
Ireland started conducting research on wave energy extraction devices [14]. As a
result, in 1985, two shoreline prototypes of 350 kW and 500 kW capacity were de-
ployed near Bergen, Norway. Later in 1991, a small 75 kW OWC was deployed at
Islay island, Scotland [35]. Apart from these physical developments, the noticeable
advancement in Europe in the following few years was the development of theoreti-
cal knowledge on wave absorption techniques which will be detailed in section 2.2.
Meanwhile in Japan, a 60 kW OWC was integrated into a breakwater [36], and in
India, a bottom-standing 125 kW OWC was constructed [14]. The largest OWC
(bottom standing) device with a capacity of 2 MW, named OSPREY, was deployed
near the Scottish coast in 1995. However, it was destroyed by the sea shortly after
the installation [14]. In July 1998, a floating-type OWC of 110 kW, named The
Mighty Whale, was built by Japan Marine Science [37]. The first prototype OWC
in Portugal with a capacity of 400 kW was built in 1999 at the island of Pico [38];
this is a shore-base OWC. In the following year, another shore-based OWC of 75
kW, named LIMPET was deployed at the Islay Island, Scotland [2]. At Port Kem-
bla, Australia, a bottom standing OWC plant of 1.5 MW with a parabolic-shaped
10
collector was deployed by the Oceanlinx (formarly Energytech) in 2005 [39]. The
Backward Bent Duct Buoy (BBDB) type OWC, invented by Masuda, have been
used in Japan and China to power about a thousand navigation buoys [40]. In
2010, Oceanlinx built a floating-type OWC which was a one-third scale of the 2.5
MW full-scale device [22]. A quarter scale BBDB converter by Ocean Energy was
installed for sea trials at Spiddal in Galway, Ireland in 2011 [41]. In the same year,
a breakwater OWC started to operate at Mutriku Basque Country, Spain; 16 sets
of Wells turbines with a capacity of 18.5 kW each were installed in that plant [42].
Among the most recent OWCs, Oceanlinx built a 1 MW fixed-type OWC named
the greenWAVE at Port Adelaide, Australia in 2014 [22]. However, the plant was
not successfully deployed because of an accident which occurred while towing the
OWC from the construction site. Additionally, a 500 kW bottom-standing OWC
with a dimension of 37× 31.2 m was deployed at Jeju Island, South Korea in 2015
[43]. At Civitavecchia harbour in Italy a breakwater OWC plant was completed in
2016. This plant is comprised of 17 caissons containing 124 U-OWCs. This plant,
like all others, was designed such a way that the natural frequencies of the OWCs
can be tuned with the incident wave frequency so that the OWCs resonate [33, 44].
2.2 Theoretical modelling of OWCs
Literature on the theoretical modelling of OWCs are presented in two subsections.
The first part highlights the works that dealt with the performance evaluation of
general OWCs; such as the efficiency of energy absorption from the incident waves
and the overall efficiency of energy extraction. As noted before, the maximum power
output from OWCs is achieved when the natural frequency of the device coincides
with the incident wave frequency, i.e., when the device resonates. Since the wave
frequency varies within a wide range, it may be beneficial to have a tuning system
which can adjust the device natural frequency with the incident wave frequency.
There are few analytical works on tuned OWCs are available in the literature. These
are presented in the second part of this section.
11
2.2.1 Performance evaluation of OWCs
The mathematical development of OWC theory began in 1970s, specially after the
oil crisis in 1973. The first theoretical expression to estimate the efficiency of a fixed-
type OWC device was derived in [45]. It gives an analytical solution to evaluate the
energy absorption efficiency of a simple OWC device. The device was assumed to
be comprised of a float which oscillates with the water column, a spring-dashpot
system that is connected to the float, and two closely-spaced vertical parallel plates
or a narrow tube which encompass the whole system. In that model, linearized
water wave theory was used. The problem was simplified by assuming the float
weightless and the spring with zero stiffness. The closely spaced plates or narrow
tube assumption made it possible to adapt the matched asymptotic expansions
method which was derived in [46]. The analytical solution can be used without
any difficulty for the two fully submerged plates or, in three dimensions, for a fully
submerged tube. It has been shown that it is possible to absorb a maximum of 50%
of the incident wave energy if the two parallel plates are of equal length. However,
with an extended version of the two dimensional model, it can be shown that a
device with two plates of unequal length can extract more than 50% of the incident
wave energy. It has also been shown in [46] that for the three-dimensional case, it is
theoretically possible to capture the energy in a wave whose crest length (the length
of a wave along its crest) is greater than the tube diameter.
An upgraded version of the above-mentioned theory has been derived in [25]. It
explains an OWC system as one driven by an uniform oscillatory surface pressure.
This theory considers a device that is fixed, open at the bottom-end, closed at the
top-end and intersecting the free water surface. The device has several air chambers
which trap a volume of air above each of the internal free surfaces. The general
working principle of the device is as follows. The wave passes through it, and the
free surface inside the device rises and falls which initiates a reciprocating movement
of the volume of air through a constriction, which is an air turbine connected to an
electricity generator. To simplify the model in [25], a simple orifice plate was used
12

in exchange of the turbine-generator arrangement. The hydrodynamics of the OWC
has been modelled based on the simple assumption that the water column oscillates
as a rigid body. To incorporate the theory into the model, a weightless piston of
known damping and added mass have been assumed in place of the free surface.
A similar approach but neglecting the spatial variation in the internal free sur-
face caused by the surface pressure was given in [45] (mentioned earlier). In [25],
a more accurate and simpler theory was presented for such devices which take the
surface pressure and the consequent spatial variation of the internal free surface into
consideration. Linearized water-wave theory was used. The compressibility of air
was neglected which allowed consideration of a linear relationship between the pres-
sure drop across the turbine and the volume flow rate through the turbine. General
expressions for the mean power absorbed by an arbitrary pressure distribution sys-
tem were derived in terms of an admittance matrix. It related the overall volume
flux Q∗ to the pressure applied to the system p∗a, the induced volume flux due to
the incident1 and scattered2 potential Q∗s, and the (assumed linear) pressure-volume
flux characteristics across the turbine (PTO system). A further explanation of these
parameters is given in Appendix B.1.
For perfect impedance matching3, it has been shown in [25] that solving the
linear wave-diffraction problem is sufficient to estimate the absorbed mean power.
However, in the case of imperfect matching, for a single pressure distribution in ei-
ther two or three dimensions, synchronisation between the pressure distribution and
the incident wavelength is required to achieve resonance. Comparing the resonant
condition of the OWC device with the equivalent rigid-body wave-energy devices, it
has been shown in [25] that the devices operating on the surface-pressure principle
can be described by the rigid body models and the results would not vary much.
In [26], a two-dimensional analysis based on the linear surface-wave theory was
1The incident wave potential is the velocity potential due to the incident wave when there isno PTO system in the device.
2The scattered wave potential is the velocity potential due to the wave that is diffracted by thedevice.
3Perfect Impedance matching: when the applied pressure p∗a is a linear combination of thevolume flux induced by the incident and scattered waves Q∗s [25].
13

derived. The combined effects of finite water depth, air compressibility and the tur-
bine characteristic were studied. A phase difference between the pressure and the
flow rate through the turbine was considered while modelling the turbine effect. For
the sake of simpler analytical expressions, the wave diffraction due to the immersed
part of the structure was ignored. Additionally, the instantaneous mass-flow rate
through the air turbine or equivalent device which produces the work from the oscil-
lation of the air in the chamber was assumed to be a known function of the pressure
difference. Both linear and nonlinear effects of the power take-off (PTO) system
were considered while modelling the OWC to make the analysis more comprehen-
sive. For the linear case, the springlike effect of air compressibility was assumed of
constant stiffness and the mass-flow rate through the air turbine was considered pro-
portional to the pressure difference across it. For the nonlinear analysis, numerical
calculations were done based on Brown’s method [47]. The linearized approximation
and the nonlinear isentropic relation between the density and the pressure were used
to compute the device efficiency. It was found that there is no significant difference
of efficiency calculated by these models except for the cases with large wave ampli-
tudes. In case of the nonlinear PTO system, the mass flow rate has been considered
to be proportional to the square root of the pressure difference.
It has also been shown in [26] that the air compressibility has a significant role
on the performance of the OWC if the air chamber height is several metres long.
Moreover, it was determined that the compression and expansion processes of air
deviate from the isentropic process due to the viscous loss in the flow through
the turbine. It was noticed that the size of the chamber and the turbine can be
reduced substantially until the system is optimally efficient. Further reduction of
these parameters causes a deficiency in overall turbine performance due to the joint
effect of viscous loss and increasing phase difference. It was stated that almost 100%
efficiency may be achieved even for a strongly nonlinear PTO system if the system
is tuned to the wavelength and to the wave amplitude.
A general theory was derived for a composite system of both oscillating bodies
14

and oscillating pressure distributions in [48]. This model is well suited to the deriva-
tion of dynamics of floating-type OWCs, since these OWCs are comprised of both
an oscillating body (OWC structure) and an oscillating pressure distribution (pres-
sure distribution inside the device). Like the above-mentioned works, linear water
wave theory has been used for the derivation. The coupling was derived between
the oscillators and represented in the form of a matrix equation which is comprised
of (analogously to electric circuit theory) the radiation admittance matrix for the
pressure distributions, the radiation impedance matrix for the oscillating bodies,
and a radiation coupling matrix between the bodies and the pressure distributions.
A formula was derived to relate the added mass and the difference between the
kinetic and potential energy of the near-field region.
In [49], hydrodynamic coefficients of a fixed-type OWC operating in a finite
water depth were expressed in terms of integral quantities of functions using the
linear water wave theory. These functions are proportional to the fluid velocity
inside the device. A Galerkin method was used to calculate the hydrodynamic
coefficients from the governing integral equations.
A linear analytical model of OWCs including the loss due to viscous shear stress
was presented in [30]. A derivation to transform the pressure distribution model to a
rigid body model was presented. Loss due to viscous shear stress was first introduced
into the rigid body model and then the transformation was used to include viscous
loss into the pressure distribution model.
In [1], an approach similar to [49] was taken to calculate the hydrodynamic
coefficients of fixed-type cylindrical OWCs. Like [49], the theory of pressure distri-
butions was used, and a Galerkin method was used to compute the hydrodynamic
coefficients; however the main difference is that the two dimensional model of [49]
has been extended to three dimensions in [1]. The total induced volume flux across
the internal free surface was considered to be the sum of induced volume fluxes due
to the scattered and radiated4 waves. The radiation volume flux was further split
4The radiated wave is the wave that radiates away from the device due to the pressure fluctuationin the air chamber when there is no incident wave.
15

into two terms which are composed of coefficients. These coefficients are analogous
to the added mass and radiation damping coefficients in the rigid-body model as
explained in [48]. These added mass and radiation damping coefficients have been
incorporated in the present study while modelling an OWC analytically in Chapter
3. It was shown that the narrower the device, the closer the pressure distribution
model is to the rigid body model.
An analytical model for the power extraction from an OWC at the tip of a break-
water was presented in [50]. The integral equations were solved for the radiation and
scattering problems in a cylindrical OWC with an open bottom. An exact solution
of the diffraction problems due to the OWC and the breakwater was derived. The
power take-off was modelled by considering the air compressibility in air chamber.
It was found that the angle of incidence affects the flow field outside the device,
however it does not affect the power extraction.
All the above mentioned works used the linear wave theory to evaluate the per-
formance of OWCs. In linear wave theory it is assumed that the flow is irrotational.
However in OWCs, there is rotational flow due to the presence of the boundary
layer inside the device and due to the free-end. Thus an analytical model is required
which will include the effects of boundary layers and the free-end. Though [30]
showed a procedure to incorporate the viscous loss into the linear OWC model, no
specific modelling of the viscous term was presented which could be used to estimate
the contribution of the viscosity in the overall performance of OWCs. Therefore,
an approach is taken in the present study to incorporate both the viscous and the
free-end effects into the linear wave modelling.
2.2.2 Tuning mechanisms of OWC devices
As mentioned in Chapter 1, it is possible to extract the maximum amount of energy
is possible to extract when OWCs operate at resonance i.e. the natural frequency
of the device coincides with the wave frequency. At resonance, oscillations increase
linearly in time until damping inhibits further growth. Most of the OWCs are
16

designed to meet the resonance condition. Another way to improve the performance
of OWCs is to synchronise the oscillation of the water-column inside the device with
the oscillation of the incident wave in such a way that the phase difference between
these oscillations should be minimum. This method is known as the phase-locking
mechanism.
To achieve either the resonance or the phase-locking condition, a tuning mecha-
nism is required in the device. The findings of the present work are to be illustrated
by applying them to the derivation of the governing equations for a tuned OWC,
which is presented in Chapter 6. Thus the literature on different tuned OWCs have
been studied and presented in this section.
A tuning mechanism of an OWC sea-water pump was presented in [3, 28]. The
sea-water pump is comprised of a resonant duct, a variable volume air-compression
chamber and an exhaust duct as shown in Figure 2.2. The air in the air-compression
chamber works like a spring. The variable-volume function of the chamber can
be used to tune the device natural frequency with the incident wave frequency
by adjusting the stiffness of the air. As a wave passes the device, it induces a
pressure at the mouth of the resonant duct which causes the flow to oscillate inside.
Consequently, the water in the exhaust duct is channelled to the receiving body.
The equations of motion of the water columns were derived from the time-dependent
Bernoulli’s equation. Damping terms due to the viscosity, vortex formation and wave
Air compression chamber
Resonant ductExhaust duct
Adjacent
compartment
Figure 2.2. Schematic diagram of the seawater pump [3].
17

radiation were incorporated into the equations of motion respectively from [51], [11]
and [12]. The equations were linearized by assuming that there is no sloshing at
the free-surface inside the device. The system has two degrees of freedom due to
the presence of two oscillating masses which oscillate in two modes; firstly, both the
water-columns along with the air in the air-compression chamber oscillate as a single
body, and secondly the water-columns oscillate against each other by compressing
and expanding the air. Thus two natural frequencies were obtained.
In [52], experiments were conducted in a wave tank with a 1 : 20 scale model
of the above-mentioned sea-water pump. A tuning algorithm was developed to
estimate the optimal volume of air in the air-compression chamber for a range of wave
period, amplitude and tidal elevation. Experiments and numerical simulations were
conducted for different polychromatic wave spectra. Results from the experiment
and numerical simulation were used to develop a tuning criterion that optimises the
system performance. No difference between the monochromatic and polychromatic
waves was observed. It was found that the pumping was optimum when the system
was tuned to the waves of lower frequencies.
A dynamic tuning mechanism of the OWC sea-water pump was presented in [4].
Generally, in a dynamic tuning system, one of the influential parameters (e.g. in
the sea-water pump, the mass of the water column and the stiffness of air in the
air-compression chamber) is varied periodically. The resultant resonance is known
as the parametric resonance. In parametric resonance, the oscillations increase ex-
ponentially with time. The main advantage of the parametric resonance over the
general resonance is once the system reaches the maximum amplitude, the oscilla-
tion does not modulate even if the system is not exactly tuned. In [4], the stiffness of
air in the air-compression chamber was varied periodically with the aid of a variable
volume air-compression chamber to achieve the parametric resonance. Figure 2.3
shows the set-up that was used to investigate the parametric resonance. In that
set-up, there were two air chambers; the main air chamber and the adjacent air
chamber. The extra volume of air in the adjacent chamber was used to increase
18

x
Tank
L
Compression chamber
V0
V∆
Equilibrium level
ValvePiston
Figure 2.3. Possible implementation of a parametric excitation of an OWC. Thevolume of the air-compression chamber is changed by the action of the piston andthe valve [4].
and decrease the overall volume of air by opening and closing the valve and conse-
quently softening and hardening the air-spring restoring force. A piston was used
to adjust the equilibrium position of the water-column surface in such a way that it
compensates for any difference due to the opening or closing of the valve.
In [5], a modified version of the conventional breakwater OWC, named the U-
OWC, was presented (Figure 2.4(b)). In the U-OWC, an additional water column
(a) (b)
Figure 2.4. Breakwater embodying OWC; (a) single column OWC, (b) U-OWC[5].
19

is introduced by adding an extra vertical duct. Though it is not an exact tuning
system, the introduction of an extra column improves the performance of the device.
Two reasons were mentioned for the performance improvement; firstly, owing to
the increase in water column length, the natural frequency of the device decreases
and hence the difference between the incident wave frequency and device natural
frequency also decreases (i.e. the system gets closer to the resonance condition).
Secondly, the pressure at the U-OWC entrance fluctuates with higher amplitude than
at the entrance of a conventional single column OWC since the entrance can now be
close to the surface, where the pressure induced by waves is maximal. Because of
these reasons, the U-OWC showed a better performance with all types of waves, i.e.
swell, small and large wind waves. A performance comparison between the U-OWC
and the conventional OWC was performed based on the theory presented in [53].
A case study on installing the U-OWC at two sites along the Italian coast (the
port of Civitavecchia and the port of Pantelleria) was presented in [54]. An ad-
vanced Wave Model (WAM) along with a numerical algorithm which determines
the shoaling-reflection effects on the wave energy propagation was used to conduct
the study. It was shown that the plant can absorb around 75% of the incident wave
power.
The present study deals with a cylindrical OWC (Chapter 3). Thus, while in-
troducing a tuning system to the device (Chapter 6), it is found that the variable
volume air-compression chamber concept of [3] would be the best suited option for
the present study.
2.3 Reciprocating pipe flow
As mentioned earlier, the flow inside the OWC is reciprocating (oscillatory flow with
zero mean). Very few works were done on the viscous reciprocating flow dynamics
in OWCs. However, some studies were conducted on wall-bounded oscillatory flow
due to its presence in many biological and industrial processes like blood flow in the
cardiovascular system, water hammer and surging in pipe flows and fluid-control
20

systems, wave-height damping and sediment movement by water waves and so on
[55]. This section of the literature review focuses on the works (analytical, exper-
imental and numerical) done on the reciprocating pipe flow investigating the flow
characteristics, transition from laminar to turbulent flow, flow developing length,
and energy loss due to the shear stress and entrance effects.
As mentioned in Chapter 1, one of the prime goals of the present work is to build
up a numerical set-up which would enable investigation of different flow character-
istics in reciprocating pipe flow, which might be difficult to conduct experimentally.
This set-up is further used to estimate energy loss due to the shear stress and free-
end effect of the OWC “pipe”. These estimated losses are then incorporated as a
damping term into the equation of motion of the OWC. The literature are reported
in chronological order.
2.3.1 Flow characteristics and transition from laminar to
turbulent
A unique phenomenon in reciprocating flow is the “annular effect”, discovered by
Richardson & Tyler in 1921 [56]. They found that unlike in unidirectional flow, the
average velocity in reciprocating flow is maximum near the pipe wall. It was also
observed that a layer of laminar flow exists near the walls, though the main body
of the flow is turbulent.
A very useful non-dimensional parameter in oscillatory and pulsatile flow is the
Womersley number (α = 12D√ω/ν, where D is the diameter of the pipe, ω is the
oscillation frequency and ν is the kinematic viscosity), first introduced in [57] by
Womersley in 1955. In that work he derived an exact solution of the equation of
motion for reciprocating pipe flow.
Another remarkable theoretical work on reciprocating pipe flow is [32], done by
Uchida in 1956. The linearized incompressible Navier-Stokes equations were used to
derive an exact solution of reciprocating laminar flow superposed on a steady flow
in circular pipe. The non-linear Navier-Stokes equations were linearized assuming
21

parallel flow in the pipe. It was found that as the oscillation frequency increases,
the amplitude at the centre of the pipe diminishes and the phase difference between
the velocity and pressure gradient increases from 00 to 900. At higher frequency,
theoretical velocity profiles of reciprocating flow agree with the finding in [56], show-
ing that the maximum average velocity exists near the wall. Additionally, it was
shown that the cycle-averaged work done by the kinetic energy is zero. However,
the cycle-averaged energy dissipation due to internal friction is always finite.
For unidirectional pipe flow the critical Reynolds number (Re∗), at which the
flow enters into the transient regime from the laminar regime is around 2300. And
Re∗, for which the flow enters into the turbulent regime from the transient regime,
is around 4000. These values are universally accepted because of their repeated
appearance in numerous investigations since the original work of Reynolds in 1880.
However, for reciprocating flow the number of investigations into equivalent critical
transition points are very few. Therefore the critical Reynolds numbers in recipro-
cating pipe flow are still a matter of further study.
In 1966, Sergeev conducted an experiment on a reciprocating flow in a vertical
pipe with a bellows connected to it, as shown in Figure 2.5 [6]. Studies were done
Figure 2.5. Schematic of experimental set-up of [6], where 1. Test pipe; 2. bellows;3. structure; 4. strain gage; 5. crank mechanism.
to measure the values of the critical Reynolds number and the damping forces in
22

laminar and turbulent regimes. Two dimensionless numbers were used to define the
conditions of transition; the oscillatory Reynolds number, Reos = U0D/ν and the
Womersley number α = 12D√ω/ν where U0 is the amplitude of cross-sectional mean
velocity, D is the diameter of the pipe, ω is the oscillation frequency and ν is the
kinematic viscosity. Experiments were done for the range of 4×103 ≤ Reos ≤ 30×103
and 4 ≤ α ≤ 40. The critical Reynolds number, Re∗os was found to be proportional
to α with a proportionality constant of 700; i.e.,
Re∗os = 700α for 4 ≤ α ≤ 40. (2.1)
Partial turbulence was observed at lower values, α < 12, when the average fluid
velocity was changing its direction during the oscillation. However, at all values of
α, a disordered motion was noticed over a length of less than ten pipe diameters
from the inlet.
Experiments were conducted on the pipe flow for different length to diameter
(L/D) ratios. It was found that the damping due to entrance losses is very small.
It was also observed that the viscous damping increases very little with the increase
of Reos in the laminar regime. The friction coefficient in the turbulent regime (for
α = 19, Reos ≈ 15×103 and for α = 7, Reos ≈ 4×103) was found to be approximately
equal to that given by the Blasius correlation, f = 0.316Re−0.25.
Almost a decade later, in 1975, Merkli and Thomann performed an experimental
study on the transition in oscillatory flow [58]. Experiments were done within the
range 42 / α / 71. It was found that turbulence appears only in a certain portion
of the flow cycle and remains absent in the rest of the flow. It was also shown that
the critical Reynolds number is
Re∗os = 400α for 42 / α / 71. (2.2)
A detailed study of the velocity profile, flow stability, and consequently the transi-
tion points in reciprocating pipe flow was done by Hino in 1976 [7]. Experiments were
23
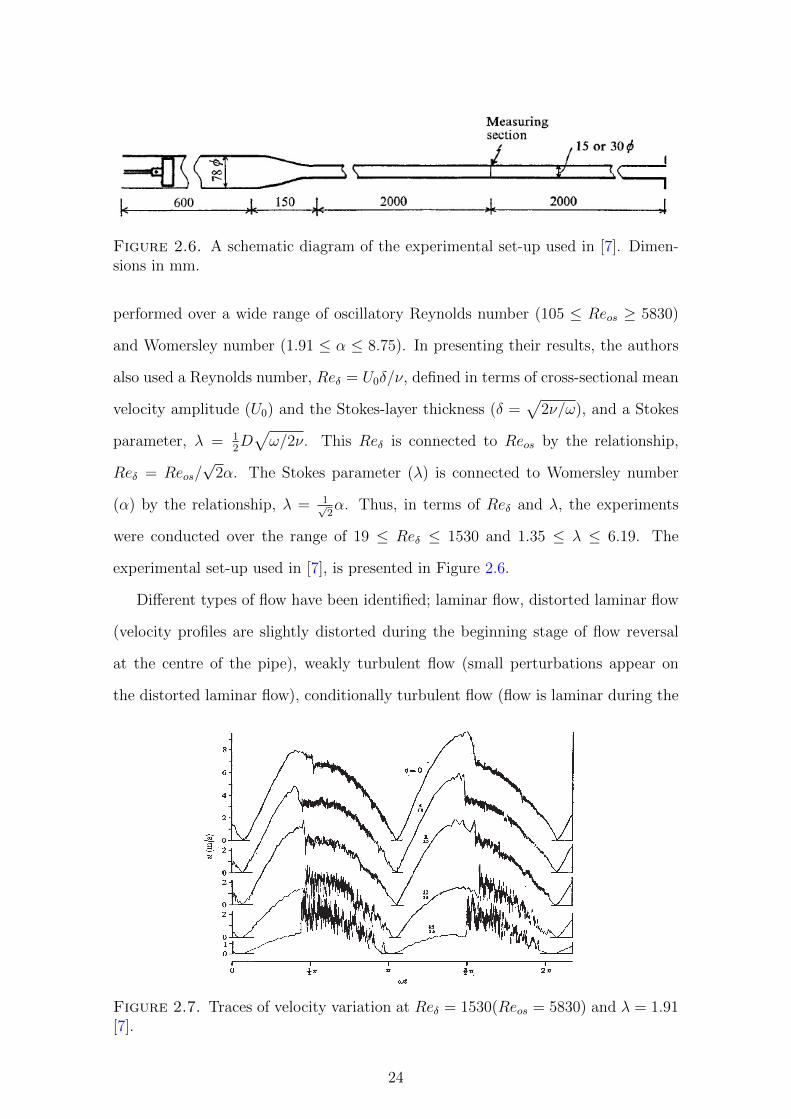
Figure 2.6. A schematic diagram of the experimental set-up used in [7]. Dimen-sions in mm.
performed over a wide range of oscillatory Reynolds number (105 ≤ Reos ≥ 5830)
and Womersley number (1.91 ≤ α ≤ 8.75). In presenting their results, the authors
also used a Reynolds number, Reδ = U0δ/ν, defined in terms of cross-sectional mean
velocity amplitude (U0) and the Stokes-layer thickness (δ =√
2ν/ω), and a Stokes
parameter, λ = 12D√ω/2ν. This Reδ is connected to Reos by the relationship,
Reδ = Reos/√
2α. The Stokes parameter (λ) is connected to Womersley number
(α) by the relationship, λ = 1√2α. Thus, in terms of Reδ and λ, the experiments
were conducted over the range of 19 ≤ Reδ ≤ 1530 and 1.35 ≤ λ ≤ 6.19. The
experimental set-up used in [7], is presented in Figure 2.6.
Different types of flow have been identified; laminar flow, distorted laminar flow
(velocity profiles are slightly distorted during the beginning stage of flow reversal
at the centre of the pipe), weakly turbulent flow (small perturbations appear on
the distorted laminar flow), conditionally turbulent flow (flow is laminar during the
Figure 2.7. Traces of velocity variation at Reδ = 1530(Reos = 5830) and λ = 1.91[7].
24

acceleration phase and turbulent during deceleration) and fully turbulent flow (flow
is turbulent throughout the cycle). These flow types will be detailed shortly. Figure
2.7 shows the velocity profiles at different phases in a conditionally turbulent flow.
It shows that the flow drastically changes from laminar to turbulent in the beginning
of the deceleration period. However, re-laminarization occurs during the reversal of
flow direction and flow remains laminar throughout the acceleration period.
Results from the experiments were used to demarcate the flow regimes on Reos-λ
and Reδ-λ stability diagrams as shown in Figure 2.8. This shows that the transition
from laminar to weakly turbulent flow occurs at lower Reos as λ becomes higher.
However, the transition from weakly turbulent to conditionally turbulent flow takes
place at Reδ = 550, i.e.,
Re∗δ = 550 (2.3)
or,
Re∗os = 780α for 1.91 ≤ α ≤ 8.75. (2.4)
In the above-mentioned work, the highest value of Reos that was investigated
is 5830, which is in the conditionally turbulent flow regime. To study the fully
Figure 2.8. Stability diagrams: Reos vs. λ (left) and Reδ vs. λ (Right). ◦, laminaror distorted laminar flows; •, weakly turbulent flow; •+, conditionally turbulent flow[7].
25

turbulent flow (where flow is turbulent throughout the cycle) was beyond the scope
of that experiment. However, Ohmi in 1982 conducted experiments on reciprocating
pipe flow within the range of 600 ≤ Reos ≤ 65000 and 2.6 ≤ α ≤ 41 [59]. Upper
limits for both Reos and α are much higher than that of [7]. Ohmi observed similar
phenomena to those that Merkli [58] and Hino [7] noticed; that is, in the turbulent
regime a turbulent burst occurs which is followed by re-laminarization in every
cycle. It was also observed that with the increase of Reynolds number (Reos), the
length of the turbulent-burst portion increases in a cycle. At high Reos, turbulence
appears almost everywhere in the cycle except small portions in the beginning of
the accelerating phase and in the end of decelerating phase. It was found that
turbulence in the turbulent-burst follows the Blasius 1/7 power law. The critical
Reynolds number found in this experiment can be given by
Re∗os = 780α for 2.6 ≤ α ≤ 41. (2.5)
The value of Re∗os found in [58] is equal to 400α for 42 / α / 71, whereas in
[7] and [59], Re∗os = 780α for 1.91 ≤ α ≤ 41. An explanation of this variation
of the transition point was given in [59]. For convenience, the different regimes in
reciprocating flow mentioned by Hino in [7] are listed below:
1. Laminar flow;
2. Distorted laminar flow (velocity profiles are slightly distorted during the be-
ginning stage of flow reversal at the centre of the pipe);
3. Weakly turbulent flow (small perturbations appear on the distorted laminar
flow);
4. Conditionally turbulent flow (flow is laminar during the acceleration phase
and turbulent during deceleration);
5. Fully turbulent flow.
26

Ohmi in [59], considered the above-mentioned type 1 as the laminar region, types 2
and 3 as the transitional region and types 4 and 5 as the turbulent region. It was
assumed in [59] that Merkli in [58] found the transition point between laminar and
distorted laminar regions. However, Sergeev in [6], Hino in [7] and Ohmi in [59]
found the transition point between distorted laminar and weakly turbulent regions.
Another experiment on transition to turbulence in reciprocating pipe flow was
done by Eckmann in 1991 [8]. A vertical circular tube was used to investigate the
reciprocating flow. To oscillate the flow in the vertical tube, a piston arrangement
was used, as shown in Figure 2.9. Experiments were conducted for a wide range of
dimensionless amplitude A0 = 2X0/D (2.4 ≤ A0 ≤ 21.6), where X0 is the piston
stroke distance, and for a wide range of α (8.9 ≤ α ≤ 32.2). It was noted that the
flow is axisymmetric at α = 17.9, A0 = 9.6; thus at Rδ =√
2A0α = 243. The effects
of the test section entrance on the flow were found to be negligible.
Figure 2.9. Schematic diagram of the experimental set-up used in [8].
27

The critical Reynolds number was found at
Re∗δ = 500 (2.6)
or,
Re∗os = 707α for 8.9 ≤ α ≤ 32.2, (2.7)
which is close to the Sergeev’s finding in [6]. It was found that the transition process
initially starts in the boundary layer region and slowly propagates inward with the
increase of Reynolds number. Flow remains laminar in the middle section of the
pipe for 500 < Reδ < 1310, while the flow near the wall is turbulent. Additionally,
within this range of Reδ, the boundary-layer turbulence is only apparent during the
deceleration phase. As the flow changes its direction, turbulence disappears and
flow becomes laminar everywhere in the pipe.
While Eckmann investigated the reciprocating pipe flow for an upper limit of
Reδ = 1310 [8], in the same year Akhavan performed experiments on reciprocating
pipe flow for an upper limit of Reδ = 2000 [9]. However in [9], the study was done
for much lower values of Womersley number α (7 ≤ α ≤ 15) than that of [8]. It has
Figure 2.10. Phase variation of the ensemble-averaged axial velocity compared tolaminar flow theory (Reδ = 1080, α = 15) [9].
28

been found that within these ranges of Reδ and α, flow remains in the conditionally
turbulent flow regime (mentioned above). Like Eckmann, Akahvan also observed
that the turbulence appears during the deceleration phase and remains confined
near the wall region. Figure 2.10 shows that even at Reδ far above the transition
point (550) flow in the middle of the pipe is almost laminar. However, near the wall
flow is turbulent during the deceleration phase.
Additionally, Das in 1998 conducted experiments on reciprocating pipe flow [60].
This reconfirmed the different flow regimes in reciprocating flow mentioned in [7].
Like Ohmi [59], Das has also assumed that Merkli [58] found the transition point
between the laminar and distorted laminar flow. It has also been shown in [60] that
the critical Reynolds numbers Re∗δ becomes independent of α for α > 2√
2, i.e., for
δ < R/2.
2.3.2 Entrance length
This section focuses on the entrance length in reciprocating pipe flow. Numerous
studies have been conducted to express the entrance length in unidirectional pipe
flow as a function of Reynolds number [61]. However, very few works have been
done to determine the entrance length in reciprocating flow.
In 1971, Gerrard studied the flow developing length in reciprocating flow and
compared that with the developing length in steady flow [10]. The flow is consid-
ered fully developed when 100 × (u∞ − u)/(u∞ − u0) becomes equal to 1, where
u∞ is the established velocity on the centreline of the pipe, u is the local velocity
and u0 is the entry velocity. Usually the tube radius (R) is used as the characteris-
tic length to determine entry length. However, Gerrard introduced a dimensionless
length x/(R2u0/ν) (x is the distance on the centreline from the entry) so that the
dimensionless velocity on the centreline, (u∞−u)/(u∞−u0) in a steady flow becomes
a universal function of x/(R2u0/ν). The dimensionless velocity, (u∞−u)/(u∞−u0),
in both reciprocating flow and in steady flow has been plotted as a function of
x/(R2u0/ν) in Figure 2.11. This shows that the entrance length in reciprocating
29

Figure 2.11. Dimensionless velocity as a function of dimension length from theentry [10].
flow is smaller than the entrance length in steady flow. According to Gerrard, the
entrance length in reciprocating flow is smaller because the vorticity generated at
the entrance diffuses only across the boundary-layer thickness δ =√
2ν/ω. How-
ever, it has been shown that if the characteristic length is changed from R to δ for
reciprocating flow, the flow developing length in reciprocating flow coincides with
the flow developing length in steady flow.
In [62], an Ultrasonic Velocity Profile (UVP) method has been used to study the
entrance length in reciprocating pipe flow. A fast Fourier transform of the oscillating
frequency near the entrance region was applied to measure the entrance length. It
has been found that the entrance length measured using the UVP method is close
to the entrance length obtained by Gerrard in [10].
2.3.3 Energy loss due to shear stress and entrance effects
Oscillation of flow in a pipe faces resistance from different sources which require the
the application of extra force to maintain a constant amplitude. These sources are
the viscous shear stress, turbulent shear stress and the vortices at the entrance. In
this section, works related to the energy loss in reciprocating pipe flow due to shear
30

stress and entrance effects are highlighted.
Ury in 1962 derived an analytical model to calculate the friction factor in the
reciprocating flow in U-tubes [63]. It has been shown that in the conditionally
turbulent region the friction factor Cf can be expressed in terms of Reos as
Cf = 0.0791Re−0.25os . (2.8)
The damping ratio due to viscosity in the mass-spring-damping equation has been
evaluated both theoretically and experimentally. It has been found that the damping
ratio decreases with the increase of Womersley number (α).
In [11], Knott and Mackley conducted an experimental study on the vortex for-
mation at the entrance of a vertical tube, while the flow in the tube is reciprocating.
Vortices generated at the entrance have been visualised and their dynamics have
been explained. It has been shown that at a sharp entrance, separation occurs
during both in-flow and out-flow which results in the formation of vortex rings. A
schematic diagram of the vortex formation at the tube-entrance due to free oscilla-
tion is represented in Figure 2.12 from [11]. It shows that at the end of first down-
stroke a free vortex ring is formed just outside the tube-entrance (Figure 2.12(d)).
As the flow begins to move upward, another vortex ring is formed just inside the
tube-entrance (Figure 2.12(e)). Initially this vortex ring is located close to the inner
walls of the tube. However, at the beginning of the second down-stroke, this inner
vortex ring is concentrated in the centre and fluid passes between the ring and the
inner walls (Figure 2.12(f)). As the flow continues its journey downward, the first
vortex ring that was formed during the first down-stroke convects downward from
the entrance and a new vortex ring is formed outside the entrance (Figure 2.12(g)).
In a similar fashion, during the second up-stroke the vortex ring that was formed in
the first up-stroke moves upward and a new vortex ring is formed inside the entrance
(Figure 2.12(h)). It has been observed that as the oscillation continues, more new
rings are formed and the old rings move further away from the entrance.
The cycle-averaged energy dissipation due to the vortices at the entrance has
31

Figure 2.12. Schematic diagram of eddy formation at the tube entrance due tofree oscillation of water column [11].
32

been found to be
Ee = 1.24ρAU30 (2.9)
in [11], where ρ is the fluid density, A is the cross-sectional area and U0 is the
amplitude of the cross-sectional area averaged velocity. The damping ratio due to
the vortices in the mass-spring-damping equation has been calculated as
ζe =1
4π
energy extracted per cycle of forced oscillation
net energy participating in the cycle, (2.10)
and it was found that ζe = 0.2U0/ωlc, where lc is the length of the water column
inside the tube.
Another experimental study on measuring the energy dissipation due to vortices
at the entrance of a vertical pipe has been presented in [12]. Total power loss due
to all sources of damping has been expressed as
Eew =1
2CU2
0 + 0.212KeρU30 , (2.11)
where C is a linear damping coefficient and Ke is the proportion of kinetic energy
being dissipated at the entrance. The first term in equation (2.11) represents the loss
due to linear damping, whereas the second term represents the loss due to non-linear
damping. It has been presumed that the presence of linear damping is because of
viscous shear stress at the wall and the radiation of waves outside the pipe; and the
non-linear damping results from the vortices generated at the pipe-entrance. Several
factors have been pointed out that govern the amount of energy loss; these are the
frequency of oscillation, the radius of the pipe lips and of the pipe itself, and the
Reynolds number.
In [64], the total power loss (Eew) in a oscillatory flow has been estimated by
measuring the fluid resistance (Ros), which has been derived as,
Ros =
∫ T0
(p1 − p2)Qosdt∫ T0Q2osdt
, (2.12)
33

where p1 − p2 is the pressure difference, Qos is the oscillation flow rate and T is the
oscillation period. The rate of energy loss has been connected to the fluid resistance
as
Eew = Ros1
T
∫ T
0
Q2osdt. (2.13)
It has been found that the fluid resistance in oscillatory flow (Ros) is connected
to the fluid resistance in laminar Poiseuille flow (Rlam) as
Ros
Rlam
=1
1 + 0.25α1.5+ 0.166α1.49 ± 6% for 0 ≤ α ≤ 1000, (2.14)
where Rlam = 128µlc/πD4 with lc is the tube length and D is the tube diameter;
and α = D2
√ω/ν is the Womersley number.
Some works are available in the literature that have not directly measured the
energy loss in the time-dependent flows, but here measured the friction factor. This
friction factor in reciprocating flows can be interpreted as a viscous loss at the
wall. Therefore, works that measured the friction factor in oscillatory flow will be
mentioned below.
In [65], the wall shear stress has been estimated by measuring the pressure gra-
dient (∂p/∂x) and cross-sectional mean velocity (uav), and then substituting them
in
u2∗ =
τwρ
=1
2R
(−1
ρ
∂p
∂x− ∂uav
∂t
), (2.15)
where
uav(ωt) =2
R2
∫ R
0
u(r, ωt)rdr = U0sin(ωt),
u∗ is the friction velocity, τw is the wall shear stress, p is the mean pressure. It
has been found that in the laminar regime for any specific Womersley number (α),
the cycle-averaged friction factor (Cf ) decreases linearly with the increase of oscil-
latory Reynolds number (Reos = U0D/ν); and for a specific Reos, Cf increases with
α. However, in the conditionally turbulent regime (as mentioned in section 2.3.1),
during the turbulent burst it has been found that Cf can be estimated from the
34

Figure 2.13. Phase variation of the wall-frictn velocity calculated by various meth-ods: —, expression (2); ooo, −ν∂u/∂r|r=R; ....., u′v′ at y/R = 0.1;− • −, laminartheory or quasi steady turbulence correlation [9].
correlation, Cf = 0.1392Re−0.25os . It has also been shown that this correlation can be
used throughout the cycle if Reos ' 2800α for 4 / α / 24.
In [9], the wall shear stress in reciprocating pipe flow has been measured and then
compared with well-established theories. For Reδ = U0δ/ν = 1080, recalling that
(δ =√
2ν/ω) and α = 15, a wall shear stress given by −ν∂u/∂r|r=R, the Reynolds
shear stress u′v′ at y/R = 0.1, and the shear stress from the laminar theory are
all presented in Figure 2.13. Values of τw/ρ are positive for the first half cycle and
negative for the second half. This is simply due to the reversal of flow direction
in the second half. It shows that the wall friction velocity during the acceleration
period agrees with the solution of Uchida, presented in [32]. During the deceleration
period the turbulent burst mentioned in section 2.3.1 takes place, and in this region
the experimental wall friction velocity agrees with the Blasius correlation,
τwρ
= 0.03325u2av
(Ruavν
)−0.25
. (2.16)
In [29] the friction coefficient in laminar oscillatory flow has been measured
experimentally and compared with the theoretical results presented in [32]. It has
35

been found that though the velocity profiles in fully developed flow are only functions
of the Womersley number α, and the friction coefficients are function of both α and
the dimensionless amplitude of fluid A0 = Xm/D, where Xm is the maximum fluid
displacement. Experimental results agreed with the theory and showed that the
friction coefficient decreases exponentially with the increase of α.
36

Chapter 3
Analytic representations of
dissipation in OWCs
The material of this chapter is presently under review as a journal paper.
As already noted, most OWCs are designed to resonate at incoming wave fre-
quencies, so that efficiency of the device should be the maximum. However, the
damping factors, which control the efficiency of the OWCs, are not clearly identified
and modelled. Therefore, an extensive study of the internal fluid dynamics of an
OWC is required to identify those damping factors, and furthermore, to estimate
the amount of energy loss due to their presence in OWCs.
As introduced in Chapter 1, the basic working principle of a general OWC is
identical to a forced mass-spring-damping system, where the water column repre-
sents the mass, and the body force of it (due to gravity) plays the role of the spring
restoring force. And the damping term is composed of the energy losses at different
parts of the OWC. As described in Chapter 2, as the incident wave hits the device,
it creates vortices at the free-end, which carry away some energy with it. Due to
the turbulence and wall shear stresses inside the device, energy dissipates. Pressure
fluctuation in the air chamber causes a secondary wave to radiate away energy from
the OWC. A major part of the damping comes from the Power-Take-Off (PTO)
system, which is, in general, the turbine-generator arrangement. Additionally if the
37
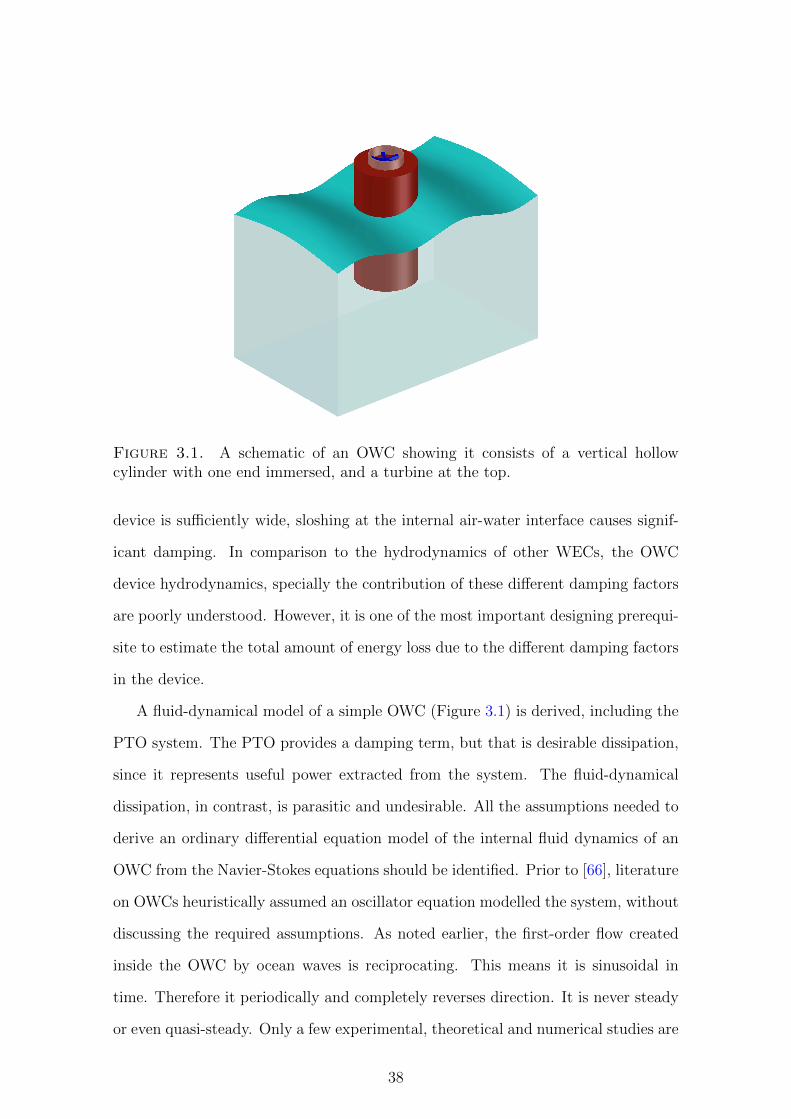
Figure 3.1. A schematic of an OWC showing it consists of a vertical hollowcylinder with one end immersed, and a turbine at the top.
device is sufficiently wide, sloshing at the internal air-water interface causes signif-
icant damping. In comparison to the hydrodynamics of other WECs, the OWC
device hydrodynamics, specially the contribution of these different damping factors
are poorly understood. However, it is one of the most important designing prerequi-
site to estimate the total amount of energy loss due to the different damping factors
in the device.
A fluid-dynamical model of a simple OWC (Figure 3.1) is derived, including the
PTO system. The PTO provides a damping term, but that is desirable dissipation,
since it represents useful power extracted from the system. The fluid-dynamical
dissipation, in contrast, is parasitic and undesirable. All the assumptions needed to
derive an ordinary differential equation model of the internal fluid dynamics of an
OWC from the Navier-Stokes equations should be identified. Prior to [66], literature
on OWCs heuristically assumed an oscillator equation modelled the system, without
discussing the required assumptions. As noted earlier, the first-order flow created
inside the OWC by ocean waves is reciprocating. This means it is sinusoidal in
time. Therefore it periodically and completely reverses direction. It is never steady
or even quasi-steady. Only a few experimental, theoretical and numerical studies are
38
available, as discussed in Chapter 2, compared with the enormous body of work on
steady flows. In the present Chapter, dissipation terms in the momentum conserva-
tion equation, for the reciprocating flow system in an OWC, are identified. Energy
loss due to the viscous and Reynolds shear stresses, radiation problem and the PTO
system are modelled; and losses due to the free-end effect is neglected assuming a
fully developed flow through out the device. Free-end losses will be considered in
Chapters 5 and 6.
3.1 Formulation
Generally, the theories of energy extraction by an OWC are derived based on the
assumption that the incident waves are sinusoidal waves of small amplitude. This
allows application of linear wave theory. The hydrodynamic forces on the water
column are decomposed into the excitation force (from the incident waves), damping
forces (energy losses at different parts of the device), and the hydrostatic restoring
force (due to the displacement of internal free surface from the equilibrium position).
If the instantaneous vertical displacement of the water column from its equilibrium
position is ξ, the equation of motion for a fixed OWC can be expressed as,
(m+ αrd)ξ + βξ + ρwgSξ + fPTO = fd. (3.1)
Here, m is the mass of the water column, αrd is the added mass due to water outside
the mouth that is also set into motion, β is the damping coefficient, ρw is the water
density, g is the acceleration due to gravity, S is the free surface area of the water
column, fPTO(t) is the force due to the PTO system and fd(t) is the driving force
from the incident waves. The damping coefficient β in equation (3.1) represents the
radiation damping (βrd, due to the waves radiating outward from the device), plus
the other damping sources which here include the wall shear stress damping (βtb).
Here, a mass-spring-damping model (equation 3.1) of an OWC is derived, from
the governing fluid dynamics equations that includes the wall shear stress damping.
39

For convenience, the variables in the mass and momentum conservation equations
are scaled to get the dimensionless equations.
The lengths in the cylindrical co-ordinate system, x∗i = (x∗, r∗, φ) are scaled as
follows,
x∗i = Dxi,
where “*” represents dimensional quantities and D is the diameter of the device.
Time, velocity and pressure are scaled with the bar representing the mean flow,
while primes represent fluctuating variables as follows,
t∗ = ω−1t,
u∗i = ωD(Ui + u′i
), (3.2)
p∗ = ρwgD(p+ p′),
where ω is the incident wave frequency and the velocity components are defined
as u∗i = (u∗, v∗, w∗). After scaling and ensemble averaging, the mass and momen-
tum conservation equations for the incompressible flow in the water column can
respectively be written as,
∇jUj = 0, (3.3)
∂Ui∂t
+ Uj∇jUi = − g
ω2D∇ip+
1
Reω
(∇2j Ui)−∇ju′iu
′j +
giω2D
, (3.4)
where the kinetic Reynolds number, Reω = ρwωD2/µ. The required steps to derive
equations (3.3) and (3.4) from the basic Navier-Stokes equations are presented in
Appendix A.1.1.
40

3.1.1 Simplifying the x-momentum equation of the water
column
It is assumed that the water flow in the device is an axisymmetric flow. Thus the
change of any variable in the φ-direction is considered to be zero, i.e. ∂()/∂φ = 0.
Including this axisymmetric flow assumption to equation (3.3) reduces the continuity
equation to
∂U
∂x+
1
r
∂(rV )
∂r= 0, (3.5)
where V is the mean radial flow. Assuming that the device is long enough to neglect
the flow development region at the entrance and therefore the internal flow is fully-
developed throughout the OWC, ∂()/∂x = 0. Applying this fully-developed flow
assumption to (3.5) gives V = const. in the radial direction. Since V = 0 at the
wall (the no-penetration boundary condition), it is null everywhere in the device at
any given time.
After all these simplifications, the x-component of equation (3.4) becomes
∂U
∂t= − g
ω2D
∂p
∂x+
1
Reω
[1
r
∂
∂r
(r∂U
∂r
)]− 1
r
∂
∂r
(ru′v′
)+
gxω2D
. (3.6)
The 3rd and 4th terms in equation (3.6) represent the viscous and turbulent (or
Reynolds) shear stress respectively. These two shear stress terms are combined and
defined as the overall shear stress
τ =1
Reω
∂U
∂r− u′v′.
In the mass-spring-damping model, the damping due to shear stress comes from this
τ . Introducing τ into equation (3.6) gives,
∂U
∂t= − g
ω2D
∂p
∂x+
1
r
∂(rτ)
∂r+
gxω2D
. (3.7)
Since the velocity in the radial direction, V = 0, it can be shown from the r-
41

component of equation (3.4) that the pressure is constant in the radial direction, i.e,
p(r) = const. Thus, in this OWC system, pressure is a function of x and t only.
To address the aim of this work, an ordinary differential equation that consists
of only the time-dependent variables is required. However in equation (3.7), the
velocity U and the shear stress τ , are functions of both t and r. And as mentioned
above, the pressure p is a function of t and x. To make U and τ independent of the
radial coordinate, we first take the area-average of equation (3.7). This is done by
multiplying it with 2πr and then integrating with respect to r between limits 0 and
R/D and then dividing by π(R/D)2. This process gives,
dUbdt
= − g
ω2D
∂p
∂x− 4τw +
gxω2D
, (3.8)
where τw is the dimensionless wall shear stress. The bulk mean velocity Ub(t) is,
Figure 3.2. Schematic of the OWC duct device
Ub =1
π(R/D)2
∫ R/D
0
(U)2πrdr.
Henceforth, Ub(t) is expressed as ξ(t), where ξ(t) is the displacement of the free
surface inside the OWC. Furthermore, integration of equation (3.8) with respect to
42

x along the water column length removes the spatial dependence of p and gives,
ξ = − 1
Klc(pa − pe)− 4τw −
1
Klcξ, (3.9)
where K = ω2/g, lc is the length of the draft of the device, pa(t) is the pressure in
the air chamber and pe(t) is the pressure at the OWC entrance.
The entrance pressure pe(t) is composed of the pressure from the incident wave
that drives the water column, pd(t), and the pressure induced by the radiation wave,
pr(t). This gives from (3.9),
ξ + 4τw +1
Klcξ +
1
Klcpa =
1
Klc(pd + pr). (3.10)
The entire flow field of an OWC can be split into a rotational and an irrotational
flow field. The pressures pd and pr in equation (3.10) are derived for the irrotational
flow field of the OWC. The derivation of these terms is provided in Appendix B. It
gives the absolute value of the amplitude of the driving pressure (pd) as
|Pd| =√
2hsN1/20 |q∗s |
πkD3sinh(kh)
∣∣∣∣∣ B
B2 + A2+ i
A
B2 + A2
∣∣∣∣∣ , (3.11)
where k = 2π/λ is the wave number, h is the water depth,
N0 = 0.5(1+(sinh(2kh)/2kh)), q∗s is the induced volume flux due to scattered waves,
hs is the significant wave height and, A and B are the radiation susceptance and
radiation conductance respectively. A detailed definition of these parameters is given
in Appendix B.2. The pressure due to radiation wave (pr) can be expressed as
pr = −Klc(βrdξ + αrdξ), (3.12)
where αrd is the added mass and βrd is the radiation damping. The presence of
the boundary layers creates the rotational flow field in the OWC. The shear stress
term τw, in the equation of motion represents the boundary layers and is derived in
section 3.1.2.
43

Substituting the radiation induced pressure pr(t) by βrd(ω) and αrd(ω) into equa-
tion (3.10) gives the form of the governing equation of motion including radiation
and shear stress damping as
(1 + αrd)ξ + βrdξ + 4τw +1
Klcξ +
1
Klcpa =
1
Klcpd. (3.13)
3.1.2 Modelling the wall shear stress, τw(t) in the recipro-
cating flow system of the OWC
The flow created inside the OWC by ocean waves is reciprocating. A reciprocat-
ing flow cycle consists of an acceleration and a deceleration phase in the positive
direction, and the same sequence in the reverse direction, giving two acceleration
and two deceleration periods. Like steady flow, the reciprocating flow might be
laminar, weakly turbulent or fully turbulent throughout the cycle, depending on the
Reynolds number, as was noted in the literature reviewed in Chapter 2. However,
Hino in [7] introduced a new flow regime in reciprocating flow, called the condi-
tional turbulence regime. In this regime, a portion of the flow cycle is laminar and
the other portion is turbulent. As Reδ = Ubδ/ν goes above 550, where the Stokes
0 π/2 π 3π/2 2π
u*
ω t*Figure 3.3. Schematic illustration of velocity at different phases in a conditionallyturbulent flow system of OWC
44
layer thickness δ =√
2ν/ω, the flow enters into this regime. Above the critical
value but at relatively low Reδ, most of the cycle is laminar, and turbulence appears
in the final portion of the deceleration period. At higher Reδ values, the flow is
laminar during the acceleration period and becomes turbulent during most of the
deceleration period, as illustrated schematically in Figure 3.3. However, the violent
turbulence generated in the deceleration period suddenly disappears as the flow re-
verses direction and starts to accelerate again. As Reδ increases further, turbulence
begins to appear in the acceleration period as well. Moreover, [67] shows that the
entire flow cycle can become turbulent if the Reδ is large enough.
In a prototype OWC the Reδ is generally above the critical number of Reδ = 550.
Thus it can be presumed that the flow in the OWC is conditionally turbulent or
fully turbulent.
The phase variation of the wall shear stress (τ ∗w) in a conditionally turbulent flow
was experimentally studied and presented in [9]. It was shown that at Reδ = 1080
and a Stokes parameter Λ = D/2δ = 10.6 the flow is laminar during the acceleration
period and the value of τ ∗w measured in this period agrees very well with the solution
for laminar oscillatory flow in a pipe [32]. However, during the deceleration period
the flow becomes turbulent, and the experimental result in [9] shows that during
this period the wall-shear velocity, τ ∗w/ρw is related to the bulk mean velocity, U∗b
as follows,
τ ∗wρw
= 0.03325 U∗2b
(2ν
DU∗b
)1/4
. (3.14)
Owing to this good agreement, this quasi-steady correlation is used to predict the
wall shear stress during the turbulent portion of the cycle.
3.1.2.1 Wall shear stress, τw in the turbulent portion of the cycle
Scaling the correlation in equation (3.14) by (A.4), and introducing the kinetic
Reynolds number Reω, gives
4τw = βtbξ, (3.15)
45

where βtb = 0.15816 Re−1/4ω |ξ|3/4. Substituting equation (3.15) into (3.13) gives the
governing equation of motion including turbulent wall shear stress and radiation
damping,
(1 + αrd) ξ + (βrd + βtb) ξ +1
Klcξ +
1
Klcpa =
1
Klcpd. (3.16)
3.1.2.2 Wall shear stress, τw in the laminar portion of the cycle
The wall shear stress, τw in the laminar period of a cycle in the fully developed
reciprocating flow is derived from Uchida’s analytic solution in [29], which can be
given as,
τ ∗wρw
= 8ωDFωU∗f sin(θ + θ1), (3.17)
where U∗f = ξ∗/sinθ; θ is the phase angle; θ1 = tan−1[(α−2C1)/(2C2)]−tan−1(C2/C1)
is the phase difference and the factor
Fω =
√C2
1 + C22
16√
(α− 2C21)2 + 4C2
2
. (3.18)
Here
C1 =ber(α)
d
dαbei(α)− bei(α)
d
dαber(α)
ber2(α) + bei2(α), C2 =
ber(α)d
dαber(α) + bei(α)
d
dαbei(α)
ber2(α) + bei2(α),
‘ber’ and ‘bei’ are the Kelvin functions and α =√
Reω/2. Introducing the scaling
factors of (3.3) into equation (3.17) gives
4τw = αlmξ + βlmξ, (3.19)
where αlm = 32Fωsin θ1 and βlm = 32Fωcos θ1. Substituting equation (3.19) into
equation (3.13) gives the governing equation of motion including laminar wall shear
stress as well as radiation damping,
(1 + αrd + αlm) ξ + (βrd + βlm) ξ +1
Klcξ +
1
Klcpa =
1
Klcpd. (3.20)
46
3.1.3 Modelling the Power-Take-Off (PTO)
To compute the pressure in the air chamber pa(t), a relationship between the PTO
performance and the hydrodynamic parameters is required. Owing to the low fre-
quency of the sea waves and high sound speed in the air, pa(t) is approximately
uniform throughout the chamber. Thus the air flow rate through the turbine is
m∗ = −d(ρaV∗)
dt∗, (3.21)
where ρa is the air density and V ∗(t) is the time-dependent air volume inside the
chamber. Following [68], the air in the chamber is considered as an ideal gas which
compresses and expands insentropically. Thus equation (3.21) can be rewritten as
m∗ = ρaQ∗ − S(lac − ξ∗)
1
c∗2dp∗adt∗
(3.22)
where the air volume rate, Q∗ = Sξ∗, lac is the length of the air chamber and c∗ is
the speed of sound in air.
It is assumed that a Wells turbine is installed in the PTO system. In [31], it is
shown that the dimensional mass flow rate through the Wells turbine, m∗/(ρaN∗t d
30)
maintains a linear relationship with the dimensionless pressure difference across it,
p∗a/(ρaN∗2t d
20); which gives
m∗ =Ktd0
N∗tp∗a, (3.23)
where N∗t is the turbine rotational speed, d0 is the turbine rotor diameter and Kt is
an empirical turbine coefficient which is fixed for a given turbine geometry.
It is also assumed that ξ∗ is very small in comparison to lac; thus combining (3.22)
and (3.23) and introducing scaling factors from (3.3) gives the ordinary differential
equation for the air pressure as
dpadt
+ 4c2Ktd0
πlacNt
pa = KD2 ρac2
ρwlacξ, (3.24)
where Nt = N∗t /ω. This can be solved in conjunction with the equation of motion
47

(3.13) for the flow in the OWC.
3.2 Results
The dimensionless instantaneous power output is calculated as
P =p∗a
ρwgD× Q∗
ωD3=π
4paξ, (3.25)
and the dimensionless average power as
Pavg =1
T
∫ T
0
P (t)dt, (3.26)
where the wave period, T = 2π/ω.
The Pavg is computed for different types of damping by solving for pa and ξ from
the corresponding equations derived above. Here three models are derived:
1. “RD” (radiation) model: Equation (3.13) is solved along with equation (3.24),
neglecting the wall shear stress τw. This gives the average power output,
Pavg when the PTO and radiation damping are present but wall shear stress
damping is not present.
2. “RD+CT” (radiation plus conditional turbulence) model: In this model Pavg
is calculated for a conditionally turbulent flow (as discussed in section 3.1.2)
where the flow inside the OWC is laminar during the acceleration period and
turbulent during the entire deceleration period as shown in Figure 3.3. There-
fore, this model includes PTO, radiation and laminar wall shear stress damping
(βlm) during the acceleration period and turbulent wall shear stress damping
(βtb) during the deceleration period.
3. “RD+TB” (radiation plus full turbulence) model: Equations (3.16) and (3.24)
are solved to calculate Pavg. This model includes the PTO, radiation and
turbulent wall shear stress damping.
48

Analytically these equations are insoluble. The explicit fourth order Runge-Kutta
algorithm is used to solve them numerically.
In this section the variation of different parameters have been presented as a
function of dimensionless wave parameter Kh (= ω2h/g), device draft length lc/h
and device diameter D/h. Note, all the independent variables have been normalised
by the water depth h, although h does not appear explicitly in the equation of
motion (equation 3.13). This is because the driving pressure (pd) in the equation of
motion is a function of h (equation 3.11) and hence all the length scales (lc, D etc.)
are commonly related to h.
The above-mentioned models are solved for air chamber length to water depth
ratio lac/h = 0.5, the significant wave height to water depth ratio hs/h = 0.2 and
turbine parameter Ktd0/lacN∗t = 0.00076 s. These values have been selected as being
representative of a fixed-type near-shore OWC.
The draft to water depth ratio lc/h = 0.5 and diameter to water depth ratio
D/h = 0.15 are used for Figures 3.4-3.5.
The variation of average power output with the dimensionless parameter Kh
for the above-mentioned damping models is presented in Figure 3.4. It shows that
in the presence of the applied damping from the PTO system and the radiation
damping, the maximum dimensionless power output at resonance is 0.167 at Kh =
1.83. It also shows that the wall shear stress in RD+CT and RD+TB models does
not cause any noticeable reduction in the power output except at the resonance
frequency. At resonance the power calculated from these two models is less than
the power calculated from the RD model by 7.78% and 12.8% respectively. For
the RD+CT model the resonance occurs at the same frequency as that of the RD
model (Kh = 1.83), however for the RD+TB model, the resonance frequency moves
to slightly lower frequency at Kh = 1.825.
A comparison of radiation and turbulent damping coefficients as a function of
Kh is presented in Figure 3.5. The radiation damping coefficient (βrd) decreases
with Kh; however, the turbulent damping coefficient (βtb) increases with Kh until
49

0
0.06
0.12
0.18
0 0.5 1 1.5 2 2.5 3 3.5 4
0.13
0.14
0.15
0.16
0.17
1.72 1.76 1.8 1.84 1.88 1.92
Kh
Pavg
Figure 3.4. Average dimensionless power against dimensionless parameter Kh fordifferent damping models: , RD; , RD+CT; , RD+TB. As anexample, if the water depth h = 10 m, significant wave height hs = 2 m, for theparameters of ω = 1.34 rad/s and D = 1.5 m, the dimensional power in kW wouldbe obtained by multiplying Pavg by (ρwgωD4)/1000 = 66.55.
0
0.003
0.006
0.009
0 0.5 1 1.5 2 2.5 3 3.5 4
Kh
β
Figure 3.5. Damping coefficients as a function of Kh for lc/h = 0.5 and D/h =0.15: , βrd; , βtb.
50

it reaches the resonance frequency and then falls rapidly as Kh increases further.
Though βtb is smaller than βrd at any Kh, at resonance βtb becomes almost equal to
βrd. This indicates that at resonance both the damping sources play important role
in the device performance. However, apart from the resonance, βrd is significantly
higher than βtb in a fixed-type near-shore OWC.
The presence of wall shear stress reduces the power output in the OWC. Figure
3.6 shows the impact of wall shear stress on the power extraction at resonance for dif-
ferent submergence depth and diameter of the device. At resonance, the percentage
of energy loss due to wall shear stress increases linearly as the submergence depth of
the device increases for a fixed diameter (Figure 3.6(a)). Whereas for a certain sub-
mergence depth of the OWC, the percentage of energy loss due to wall shear stress
decreases exponentially with the increase of the diameter (Figure 3.6(b)). Both the
figures ascertain that for a constant water depth if the draft to diameter ratio (lc/D)
increases, the relative loss due to wall shear stress increases significantly.
0
5
10
15
20
25
0.2 0.3 0.4 0.5 0.6 0.7 0.8
0
10
20
30
0.1 0.2 0.3 0.4 0.5 0.6
lc/h D/h
Ener
gylo
ss(%
)
Ener
gylo
ss(%
)
(a) (b)
Figure 3.6. Energy loss due to wall shear stress (a) at different lc/h for D/h = 0.15(b) at different D/h for lc/h = 0.5. ◦ , RD+CT; • , RD+TB.
For a narrow device (large lc/D), the water column inside the OWC can be
regarded as a solid-body, and hence its motion can be assumed to be the oscillation
of a liquid pendulum. The approximate natural frequency of such a device is√
g/lc
rad/s, where lc is the length of the duct that is under water. Thus, for a purely
solid-body motion the resonance should occur at Klc = 1. For a constant D, with
the decrease of lc (device becoming shorter), the oscillation of the water column
51

Kh
Pavg
Kh
Pavg
l c/h
D/h
(a) (b)
Figure 3.7. Average dimensionless power calculated for the RD+TB model as afunction of (a) Kh and lc/h for D/h = 0.15, and (b) Kh and D/h for lc/h = 0.5.The dashed line represents the position of the peak at resonance if the water columnworks as a solid-body.
deviates more from the solid-body model. Consequently the resonance takes place
at lower Klc value than the expected one. A similar phenomenon occurs when D
is increased (the device gets wider) by keeping lc constant. This effect can be seen
from Figure 3.7 which shows contours of the average power Pavg as a function of Kh
and lc/h. According to the solid-body oscillation approximation, for D/h = 0.15
and lc/h of 0.8, 0.6 and 0.4 the resonance is expected at Kh = 1.25, 1.67 and 2.5
respectively (from the dashed line in Figure 3.7(a)); however it is occurring, as
indicated by the darkest contours, at Kh = 1.175, 1.495 and 2.135, with a deviation
of 6%, 10.48% and 14.6% respectively. For lc/h = 0.5 the solid-body approximation
suggests that resonance will always occur at Kh = 2 for any value of D/h. Figure
3.7(b) presents contours of Pavg as a function of Kh and D/h for this case. The
expected resonance at Kh = 2 is marked with a dashed line. Figure 3.7(b) shows
that with the increase of D/h while lc/h is kept constant, the oscillation deviates
from the solid-body model significantly and resonance is occurring at a lower Kh
value than the expected one.
The study of the influence of device geometry on the radiation and wall shear
stress damping is one of the most important prerequisites while designing an OWC.
52
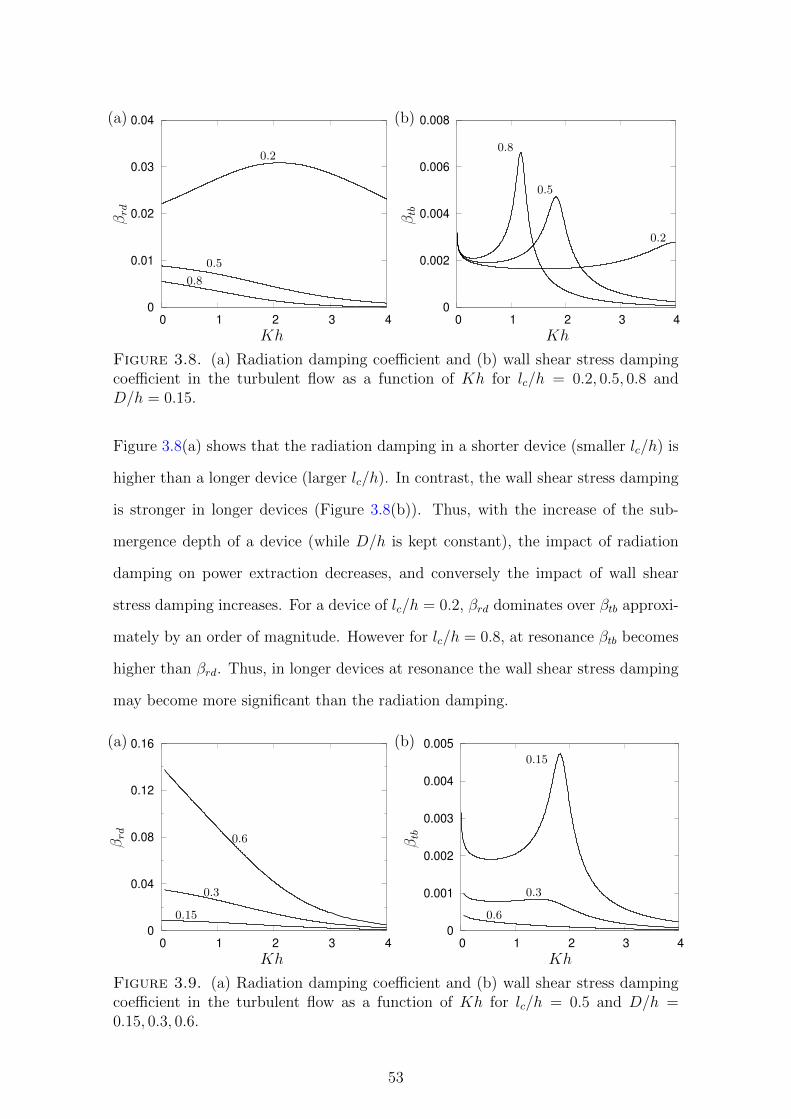
0
0.01
0.02
0.03
0.04
0 1 2 3 4
0
0.002
0.004
0.006
0.008
0 1 2 3 4
Kh Kh
βrd
βtb
0.2
0.5
0.8
0.8
0.5
0.2
(a) (b)
Figure 3.8. (a) Radiation damping coefficient and (b) wall shear stress dampingcoefficient in the turbulent flow as a function of Kh for lc/h = 0.2, 0.5, 0.8 andD/h = 0.15.
Figure 3.8(a) shows that the radiation damping in a shorter device (smaller lc/h) is
higher than a longer device (larger lc/h). In contrast, the wall shear stress damping
is stronger in longer devices (Figure 3.8(b)). Thus, with the increase of the sub-
mergence depth of a device (while D/h is kept constant), the impact of radiation
damping on power extraction decreases, and conversely the impact of wall shear
stress damping increases. For a device of lc/h = 0.2, βrd dominates over βtb approxi-
mately by an order of magnitude. However for lc/h = 0.8, at resonance βtb becomes
higher than βrd. Thus, in longer devices at resonance the wall shear stress damping
may become more significant than the radiation damping.
0
0.04
0.08
0.12
0.16
0 1 2 3 4
0
0.001
0.002
0.003
0.004
0.005
0 1 2 3 4
Kh Kh
βrd
βtb0.6
0.3
0.15
0.15
0.3
0.6
(a) (b)
Figure 3.9. (a) Radiation damping coefficient and (b) wall shear stress dampingcoefficient in the turbulent flow as a function of Kh for lc/h = 0.5 and D/h =0.15, 0.3, 0.6.
53

Additionally, Figure 3.9 shows the variation of βrd and βtb with the increase
of D/h for a constant lc/h. As the device gets wider (D/h increases) the radia-
tion damping (βrd) becomes stronger but converges slowly as Kh increases (Figure
3.9(a)). On the other hand, the wall shear stress damping (βtb) drops rapidly with
the increase of device diameter (Figure 3.9(b)). For wider devices, βrd is very much
larger than βtb. However, as the device gets narrower (D/h decreases), the difference
between these two damping coefficients decreases.
0
0.1
0.2
0.3
0.4
0.5
0 1 2 3 4
0
0.1
0.2
0.3
0.4
0.5
0 1 2 3 4
Kh Kh
|Pd|
|Pd|
0.2
0.5
0.8
0.15
0.3
0.6
(a) (b)
Figure 3.10. The amplitude of the driving pressure as a function of (a) Kh forlc/h = 0.2, 0.5, 0.8; D/h = 0.15 and (b) Kh for D/h = 0.15, 0.3, 0.6; lc/h = 0.5.
The amount of pressure that an OWC gets from the incident wave varies with the
wave frequency and also with the device dimension. Figure 3.10 shows the variation
of the amplitude of the driving pressure, |Pd| with Kh for different lc/h and D/h.
Figure 3.10(a) shows that the driving pressure from the incident wave is higher in a
shorter device (smaller lc/h) at any wave frequency. Whereas Figure 3.10(b) shows
that as the diameter of the OWC increases the incident wave pressure amplitude
at the device entrance decreases. For any dimension of the device, |Pd| decreases
exponentially with Kh, except for a rapid increase at the beginning.
Finally, the dimensionless power Pavg as a function of Kh and the significant
wave height to water depth ratio hs/h is presented in Figure 3.11. As the wave
height increases the power output from the device increases, as expected. However,
apart from the resonance this increase in power extraction is not very significant.
54

Kh
hs/h
Pavg
Figure 3.11. Average dimensionless power extracted from an OWC of lc/h =0.5 and D/h = 0.15, as a function of Kh and hs/h for the RD+TB model. Forexample, if the water depth h = 10 m and the significant wave height hs = 3 m,at resonance (ω = 1.34 rad/s) a device of lc = 5 m and D = 1.5 m can extractPavg × ρwgωD4/1000 ≈ 0.3× 66.55 ≈ 20 kW power.
Additionally, as the significant height goes higher the range of Kh over which the
resonance occurs gets wider.
In summary, though the radiation damping is the most dominant damping in
the fixed-type near-shore OWCs, the wall shear stress damping becomes significant
when the device resonates. The narrower the device (larger lc/D for a given h) the
more the oscillation of the water column inside the device gets close to the solid body
oscillation. As the device gets narrower (oscillation gets closer to solid-body) the
radiation damping decreases and consequently the average power output increases.
On the other hand, the wall shear stress damping becomes stronger as the device
gets narrower. As shown in Figure 3.6, the wall shear stress can reduce the power
extraction at resonance by more than 20% for some lc/D values.
55
3.3 Summary
Damping due to the PTO system, radiated waves, internal wall shear stress and
the flow development region at the entrance are the major damping factors in a
general OWC. Understanding these different damping factors and estimating their
contribution to the energy loss is one of the most important design prerequisites.
A mass-spring-damping model of a simple OWC is derived from the Navier-
Stokes equations that includes the damping due to the wall shear stress. The radia-
tion properties are calculated from [1] and adapted into the current model through a
conversion to the present rigid-body model. The wall shear stress damping is mod-
elled specifically for the reciprocating flow inside the OWC. An ordinary differential
equation of the air pressure inside the air chamber is derived to include the PTO
system. Since analytic modelling of the energy loss due to the developing region at
the entrance is only likely to be feasible following numerical modelling which will be
undertaken for the following Chapters, the flow is assumed fully-developed in the
present Chapter.
It is found that while the radiation damping is the most dominant damping in the
fixed-type near-shore devices, the wall shear stress damping also becomes significant
at the resonance for narrower devices. Thus the wall shear stress damping needs to
be considered while designing an OWC that resonates at the incident wave frequency.
56

Chapter 4
Entrance length in laminar
reciprocating pipe flow
As mentioned in the previous Chapter, the flow in the OWC is assumed fully devel-
oped through out the device while conducting the analytical study. In reality, there
is developing length at the free-end of the OWC. As mentioned in Chapter 1, unlike
the unidirectional flow, there is no well established correlation between the Reynolds
number and the developing length in the reciprocating flow. Thus an approach is
taken to measure the developing length at the free-end in reciprocating pipe flow.
As the flow enters into a conduit, the fluid particles close to the walls slow down
due to the no-slip boundary condition. A resistance from the slower particles close
to the walls propagates inward owing to the presence of viscosity. Consequently,
a boundary layer is generated separating the vortex dominated flow near the walls
and the free stream near the centre. As the distance from the entrance increases,
the thickness of this boundary layer becomes constant, resulting in a constant ve-
locity profile along the axis. The distance that is required for a velocity profile at
the entrance to become fully developed, (i.e., so that velocity profile does not vary
along the axis) is generally defined as the entrance length. One of the most impor-
tant prerequisites to study the fully developed flow is to know the entrance length.
Additionally, it is important to know the entrance length to estimate the energy loss
57
due to the entrance.
Numerous studies on measuring the entrance length in laminar steady flow are
available in the literature, e.g., [69–72]. Some works have been done on the esti-
mation of the entrance length in pulsatile flows with non-zero mean, e.g., [73, 74].
However, the limited application of laminar reciprocating flow in engineering prac-
tice has not made the field very attractive; thus very few works are found in the
literature that evaluated the entrance length in reciprocating flow. The analyti-
cal work on the Oscillating Water Column in Chapter 3 has raised questions like
whether the pipe entrance has significant effect on the reciprocating flow, how far
the effect continues from the entrance and so on.
As noted in Chapter 2, entrance length in a laminar reciprocating pipe flow has
been experimentally investigated by Gerrard in [10]. Experiments were conducted to
measure the entrance length at different phases of the flow cycle. The entrance length
was estimated by plotting the deviation of local velocity from the fully developed
velocity as a function of a non-dimensional distance xν/δ2u0, where x is the distance
from the entrance, δ =√
2ν/ω is the Stokes-layer thickness, u0 is the cross-sectional
mean velocity and ν is the kinematic viscosity. It has been shown that the flow
development in reciprocating flow as a function of xν/δ2u0 is almost similar to that
of the steady flow when the flow development in steady flow is plotted as a function
of xν/R2u0, where R is the pipe radius. It was also noted in Chapter 2 that a similar
result has been obtained by Yamanaka in [62] where an Ultrasonic Velocity Profile
method was used to measure the entrance length.
However, Gerrard’s experiment was limited to a Womersley number α = 12D√ω/ν
= 14.4 and the dimensionless cross-sectional mean velocity amplitude A0 = U0/ωD
= 2.6. What happens at lower α or higher A0, and how the entrance length varies
with α and A0, are not known from the literature.
In the present Chapter, a study using Direct Numerical Simulation (DNS) is
conducted to deduce the impact of α and A0 on the entrance length. The entrance
length is measured for a wide range of α (1.6 ≤ α ≤ 10) and A0 (1 ≤ A0 ≤ 9) within
58
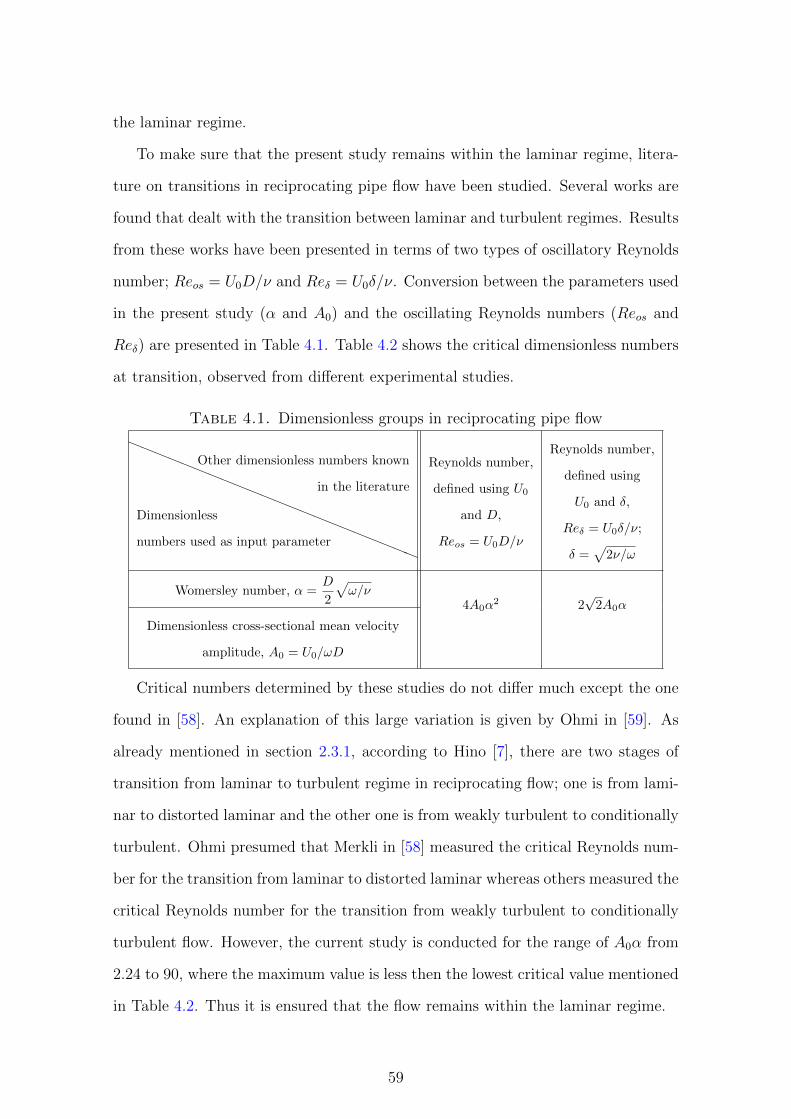
the laminar regime.
To make sure that the present study remains within the laminar regime, litera-
ture on transitions in reciprocating pipe flow have been studied. Several works are
found that dealt with the transition between laminar and turbulent regimes. Results
from these works have been presented in terms of two types of oscillatory Reynolds
number; Reos = U0D/ν and Reδ = U0δ/ν. Conversion between the parameters used
in the present study (α and A0) and the oscillating Reynolds numbers (Reos and
Reδ) are presented in Table 4.1. Table 4.2 shows the critical dimensionless numbers
at transition, observed from different experimental studies.
Table 4.1. Dimensionless groups in reciprocating pipe flow
aaaaaaaaaaaaaaaaaaaaaa
Dimensionless
numbers used as input parameter
Other dimensionless numbers known
in the literature
Reynolds number,
defined using U0
and D,
Reos = U0D/ν
Reynolds number,
defined using
U0 and δ,
Reδ = U0δ/ν;
δ =√
2ν/ω
Womersley number, α =D
2
√ω/ν
4A0α2 2
√2A0α
Dimensionless cross-sectional mean velocity
amplitude, A0 = U0/ωD
Critical numbers determined by these studies do not differ much except the one
found in [58]. An explanation of this large variation is given by Ohmi in [59]. As
already mentioned in section 2.3.1, according to Hino [7], there are two stages of
transition from laminar to turbulent regime in reciprocating flow; one is from lami-
nar to distorted laminar and the other one is from weakly turbulent to conditionally
turbulent. Ohmi presumed that Merkli in [58] measured the critical Reynolds num-
ber for the transition from laminar to distorted laminar whereas others measured the
critical Reynolds number for the transition from weakly turbulent to conditionally
turbulent flow. However, the current study is conducted for the range of A0α from
2.24 to 90, where the maximum value is less then the lowest critical value mentioned
in Table 4.2. Thus it is ensured that the flow remains within the laminar regime.
59

Table 4.2. Critical dimensionless numbers at transition
Reference Re∗os Re∗δ (A0α)∗ Range of α
[6] 700α 495 175 4 ≤ α ≤ 40
[58] 400α 283 100 42 ≤ α ≤ 71
[7] 780α 550 195 1.91 ≤ α ≤ 8.75
[59] 780α 550 195 2.6 ≤ α ≤ 41
[8] 707α 500 177 8.9 ≤ α ≤ 32.2
In the present study, the flow field is investigated in a pipe with free-ends exiting
to reservoirs as shown in Figure 4.1. All the dimensions are normalised by the pipe
diameter. The flow rate at the reservoir inlets is driven sinusoidally with time, and
equal and opposite at each end. A structured mesh of 5136 quadrilateral elements
with 64 internal points on each element is used to run the simulations. While
validating the code, it has been found that around 30% less number of elements
than the present number of elements, with 49 internal points on each element give
the same velocity profile as the theoretical velocity profile derived in [32]. The
DNS code used in the present study uses a nodal-based spectral-element method
to solve the incompressible Navier-Stokes equations. It is assumed that the flow is
axisymmetric throughout the flow domain. A more detailed description of the DNS
code is given in Appendix C.
Figure 4.1. Schematic diagram of the geometry.
60

4.1 Validation
To validate the numerical code, the axial velocity profiles in fully developed flow
obtained from the simulations are compared with analytical results. The exact
solution of the axial velocity in a fully developed reciprocating pipe flow is derived
from [32] where Uchida presented an analytical solution for the axial velocity in a
pulsating flow. Thus, the axial velocity in a fully developed reciprocating pipe flow,
as a function of α and A0 can be given as
u =4νA0α
3
D√
(α− 2C1)2 + 4C22
[B1 cosωt+ (1−B2) sinωt], (4.1)
where
B1 =bei(α)ber(2αr)− ber(α)bei(2αr)
ber2(α) + bei2(α), B2 =
ber(α)ber(2αr) + bei(α)bei(2αr)
ber2(α) + bei2(α),
C1 =ber(α)
d
dαbei(α)− bei(α)
d
dαber(α)
ber2(α) + bei2(α), C2 =
ber(α)d
dαber(α) + bei(α)
d
dαbei(α)
ber2(α) + bei2(α);
where ‘ber’ and ‘bei’ are the Kelvin functions, and r is the dimensionless radial
-0.5
0
0.5
-2 -1 0 1 2 -1.5 -1 -0.5 0 0.5 1 1.5
5π
3
2π
3
4π
3π
π
32π
5π
3
2π
3
4π
3π
π
32π
u u
r/D
(a) (b)
Figure 4.2. Comparison between theoretical results (•) and simulation results(—) of the velocity profiles in fully developed flow for (a) α′ = 4α2 = 50, A0 = 3;(b) α′ = 400, A0 = 3.
61

distance. To avoid fractional numbers while presenting the results, α is represented
by α′ = 4α2 in the rest of this Chapter.
Theoretical results from equation (4.1) and simulation results are compared for
α′ = 50 and A0 = 3 in Figure 4.2(a) and for α′ = 400 and A0 = 3 in Figure 4.2(b).
The simulation results are obtained by extracting the profile at the middle of the
pipe. It can be seen that the code can compute the velocity profile in reciprocating
pipe flow with no noticeable error.
4.2 Measuring the entrance length
The centreline velocity (uc) is generally used to measure the entrance length in pipe
flows, e.g. [10, 72]. The present study also uses the centreline velocity to measure
the entrance length. However, as an additional parameter, the transverse velocity
gradient at the wall (∂u/∂r|w) is also used to determine the entrance length. A
comparison of the centreline velocity at the pipe entrance and at the fully developed
region at different phases of the cycle is presented in Figure 4.3. It shows that
from 0 to π/2 the inflow is decelerating and from π/2 to π and from π to 3π/2
the outflow is accelerating and decelerating, respectively. From 3π/2 to 2π the
π/2
π
3π/2
2π
-1.5 -1 -0.5 0 0.5 1 1.5
uc
φ
Figure 4.3. Time history of the centreline velocity (uc) at the pipe entrance (◦)and at the fully developed region (•) for α′ = 400 and A0 = 3.
62

inflow is accelerating. It also shows that at the entrance uc is not purely sinusoidal,
however at the distance where the flow becomes fully developed, uc becomes purely
sinusoidal.
To demonstrate the evolution of both uc and ∂u/∂r|w along the pipe at different
phases of the cycle, the velocity profiles at different distance from the entrance for
α′ = 400 and A0 = 3 are presented in Figure 4.4. It shows that at φ = π/6,
which is within the decelerating period of the inflow, the velocity profile near the
entrance (x/D = 0, 1, 2) differs from the one that is in the fully developed region
(x/D = 50), i.e., both uc and ∂u/∂r|w at the entrance differ from the fully developed
values. At φ = 4π/6, which is within the accelerating period of the outflow, the
difference between the velocity profile near the entrance and in the fully developed
region becomes significant. However, this difference gradually reduces at φ = 7π/6
-0.5
0
0.5
0 0.4 0.8 0 0.4 0.8
-0.5
0
0.5
0 0.4 0.8 0 0.4 0.8
u u
u u
r/D
r/D
x/D
=0 1 2 50
x/D
=0 1 2 50
x/D
=0 1 2 50
x/D
=0 1 2 50
φ = π/6
φ = 10π/6φ = 7π/6
φ = 4π/6
Figure 4.4. Evolution of velocity profile along the pipe, at different phases of thecycle for α′ = 400 and A0 = 3.
63

and 10π/6 which belong to the decelerating period of the outflow and accelerating
period of the inflow respectively. In summary, the difference between the magnitude
of the measured variable (uc or ∂u/∂r|w) at the entrance and in the fully developed
region is more during the inflow than during the outflow.
4.2.1 Measuring techniques
Two different methods are used to measure the entrance length (le).
1. The first method is to measure the difference between uc or ∂u/∂r|w in the fully
developed region and at different locations from the entrance i.e., (uc)∞−uc or
(∂u/∂r|w)∞ − ∂u/∂r|w where the subscript ∞ represents the fully developed
value. The distance from the entrance that is required for the difference to
reduce to 0.01 will be considered as the entrance length.
2. The second method is to measure the gradient of uc and ∂u/∂r|w along the
pipe, i.e., ∂uc/∂x and ∂(∂u/∂r|w)/∂x; the distance from the entrance that
is required for the gradients to reach 0.01 will be considered as the entrance
length.
x x
(∂u/∂r)w uc
φ φ
(a) (b)
Figure 4.5. Contours of (a) ∂u/∂r|w and (b) uc for α′ = 400 and A0 = 3, as afunction of the distance from the entrance (x) and the phase variation φ; the symbols(•) show the location where (∂u/∂r|w)∞ − ∂u/∂r|w = 0.01 and (uc)∞ − uc = 0.01on the corresponding plots.
64

x x
(∂u/∂r)w uc
φ φ
(a) (b)
Figure 4.6. Contours of (a) ∂u/∂r|w and (b) uc for α′ = 400 and A0 = 3, asa function of the distance from the entrance (x) and the phase variation φ; thesymbols (•) show the location where ∂(∂u/∂r|w)/∂x = 0.01 and ∂uc/∂x = 0.01 onthe corresponding plots.
Figure 4.5 and 4.6 show the entrance lengths (le) measured by the above-mentioned
methods at different phases of the cycle for α′ = 400 and A0 = 3. The variation of le
for both the methods follows the same sinusoidal pattern with time. A comparison
of the time history of le (Figure 4.5 or 4.6) with the time history of uc (Figure 4.3)
shows that there is an approximately 90◦ phase difference between these two. During
the inflow deceleration le increases and reaches to its maximum value when the flow
changes its direction and outflow acceleration starts. Throughout the outflow (both
acceleration and deceleration periods) the entrance length decreases and reaches its
minimum when the flow changes its direction again and inflow acceleration starts.
Thus the maximum entrance length in a reciprocating pipe flow is found when the
flow changes its direction from inflow to outflow, and the minimum entrance length
is found when the flow changes its direction from outflow to inflow.
65

4.2.2 Comparing the measurement techniques
Comparison between the measured variables uc and ∂u/∂r|w, for the two measur-
ing methods, in terms of the dimensionless maximum entrance length ((le)max/D)
and cycle-average entrance length ((le)mean/D) are presented in Figure 4.7 and 4.8.
Figure 4.7 shows the results as a function of α′ for A0 = 3, while Figure 4.8 shows
the results as a function of A0 for α′ = 400.
It can be seen from both the figures that (le)max/D measured by uc and ∂u/∂r|w
varies very little from one another in both the methods. However, (le)mean/D mea-
sured by uc and ∂u/∂r|w varies up to a few diameters at higher A0 values. In all
the cases, ∂u/∂r|w measures a longer entrance length than the entrance length mea-
sured by uc. Furthermore, among the two methods, Method 2 measures a slightly
2
4
6
8
10
0 100 200 300 400
2
4
6
8
10
0 100 200 300 400
0
2
4
6
0 100 200 300 400
0
2
4
6
0 100 200 300 400
(le) m
ax/D
(le) m
ean/D
(le) m
ax/D
(le) m
ean/D
α′ α′
α′ α′
(a) (b)
(c) (d)
(∂u/∂r|w)∞ − ∂u/∂r|w = 0.01 ◦(uc)∞ − uc = 0.01 •
(∂u/∂r|w)∞ − ∂u/∂r|w = 0.01 ◦(uc)∞ − uc = 0.01 •
∂(∂u/∂r|w)/∂x = 0.01 ◦∂uc/∂x = 0.01 •
∂(∂u/∂r|w)/∂x = 0.01 ◦∂uc/∂x = 0.01 •
Figure 4.7. Maximum entrance length of the cycle, measured using (a) Method1, (b) Method 2; and the cycle-average entrance length measured using (c) Method1, (d) Method 2, as a function of α′, for A0 = 3.
66

0
5
10
15
20
25
30
0 2 4 6 8 10
0
5
10
15
20
25
30
0 2 4 6 8 10
0
4
8
12
16
20
0 2 4 6 8 10
0
4
8
12
16
20
0 2 4 6 8 10
(le) m
ax/D
(le) m
ean/D
(le) m
ax/D
(le) m
ean/D
A0 A0
A0 A0
(a) (b)
(c) (d)
(∂u/∂r|w)∞ − ∂u/∂r|w = 0.01 ◦(uc)∞ − uc = 0.01 •
(∂u/∂r|w)∞ − ∂u/∂r|w = 0.01 ◦(uc)∞ − uc = 0.01 •
∂(∂u/∂r|w)/∂x = 0.01 ◦∂uc/∂x = 0.01 •
∂(∂u/∂r|w)/∂x = 0.01 ◦∂uc/∂x = 0.01 •
Figure 4.8. Maximum entrance length of the cycle measured using (a) Method 1,(b) Method 2; and the cycle-average entrance length measured using (c) Method 1,(d) Method 2, as a function of A0, for α′ = 400.
longer entrance length than Method 1, i.e., ∂(∂u/∂r|w)/∂x measures a slightly longer
entrance length than the one measured by (∂u/∂r|w)∞ − ∂u/∂r|w.
Since there is no significant difference in entrance lengths measured by the dif-
ferent techniques, while ∂(∂u/∂r|w)/∂x estimates the longest entrance length, the
rest of this thesis uses ∂(∂u/∂r|w)/∂x to analyse the results.
4.3 Results
As noted earlier, the entrance length in laminar time-steady pipe flow has been
studied in numerous works. A general correlation between the entrance length and
the Reynolds number (Re = UD/ν) in laminar flow is given in text books, e.g.,
[61], as le/D = 0.05Re, and more precise measurements in [72] has shown that the
67

correlation is le/D = [(0.619)1.6 + (0.0567Re)1.6]1/1.6. However, the absence of such
a correlation in laminar reciprocating pipe flow provides inspiration for the analysis
of the present results in such a way that a correlation can be established.
Figure 4.9 presents the maximum entrance length to diameter ratio ((le)max/D)
as a function α′ (50 ≤ α′ ≤ 400) for A0 = 1 to 9. It shows that for any value
of A0 the lowest (le)max is at α′ = 50. It increases to the maximum at α′ = 100,
except for A0 = 9. From α′ = 100 to 200, (le)max/D decreases linearly. From
α′ = 200 to 400 for A0 = 1 to 7, (le)max/D also decreases linearly, however with a
relatively smaller slope. For α′ = 350 and 400 at A0 = 8 and 9, results deviate from
the trend at lower amplitudes. There are two possible reasons for this deviation.
Firstly, all the measurements for A0 = 1 to 7 are done in the 4th period of the flow,
however for A0 = 8 and 9 the measurements are done in the 3rd cycle, owing to
computational limitations. It may happen that the solution is not converged to a
truly periodic solution in the 3rd cycle at higher α′ for A0 = 8 and 9. Secondly,
it is possible that the flow is not in the laminar regime at α′ = 350, A0 = 8;
which is equivalent to A0α = A0
√(α′/4) = 74.83. Though this value is lower than
any critical value presented in Table 4.2, a reasonable explanation can be given to
0
5
10
15
20
25
30
100 200 300 400
9
8
7
6
5
4
3
2
A0 = 1
α′
(le) m
ax/D
Figure 4.9. Maximum entrance length to diameter ratio as a function of α′ atdifferent A0.
68

support this finding. All the works listed in Table 4.2 conducted the experiments
with a cylinder-piston arrangement, connected to the main test section with a bell
shaped entrance to measure the critical Reynolds number, i.e., with no free-ends.
However in the present study, the flow is investigated in a pipe with free-ends. Thus,
most likely the disturbance from the free-ends forces the flow to become unstable at
lower α than the previous studies have measured.
0
5
10
15
20
25
30
1 3 5 7 9
A0
(le) m
ax/D
Figure 4.10. Maximum entrance length to diameter ratio as a function of A0 forα′ = 50, × ; α′ = 100, • ; α′ = 200, + ; and α′ = 400, ◦ .
The maximum entrance length (le)max/D as a function of A0 for α′ = 50, 100, 200
and 400 is presented in Figure 4.10. It can be seen from Figure 4.9 that for α′ = 50,
with an increase of A0, (le)max/D does not increase proportionally. Thus a nonlinear
increase of (le)max/D with A0 can be seen for α′ = 50 in Figure 4.10. For α′ = 100
and 200, (le)max/D varies linearly with A0, however the slope is higher for α′ = 100
than that for 200. From α′ = 200 to 400, (le)max/D varies linearly with A0 with
very small slope difference except for α′ = 400 at A0 = 8 and 9. An explanation of
this deviation has been given while describing Figure 4.9.
A combined form of all the data shown in Figure 4.9 and 4.10 are presented in
Figure 4.11, except for α′ = 50. It is found that if the entrance length is scaled
with Stokes-layer thickness (δ =√
2ν/ω) instead of the diameter (D) and plotted
69

0
100
200
300
400
0 50 100 150 200 250 300
Reδ
(le) m
ax/δ
Figure 4.11. Maximum entrance length to Stokes-layer thickness ratio as a func-tion of Reδ for the range α′ from 100 to 400 and A0 from 1 to 9. The straight linerepresents the correlation (le)max/δ = 1.37Reδ + 5.3.
against the Reynolds number defined by δ, which is a function of both A0 and α′,
i.e., Reδ = A0
√2α′, all the data collapse to a single trend as shown in Figure 4.11.
It can be seen that the best fit for this trend is linear. Therefore a linear correlation
can be established between (le)max/δ and Reδ as, (le)max/δ = 1.37Reδ + 5.3 which
is valid for the range of α′ from 100 to 300 for 1 ≤ A0 ≤ 9 and from 300 to 400 for
1 ≤ A0 ≤ 7.
The dimensionless cycle-average entrance length ((le)mean/D) as a function of α′
and A0 is presented in Figure 4.12 and 4.13 respectively. Figure 4.12 shows that
for lower A0 values (1 to 4), (le)mean/D varies nonlinearly up to α′ = 150. From
150 to 400, (le)mean/D increases linearly, however with a very small slope. For A0
from 5 to 7, (le)mean/D increases exponentially up to α′ = 200. From 200 onwards,
(le)mean/D increases linearly with the same slope as the slope for lower A0 values.
For A0 = 8 and 9, the exponential growth is up to α′ = 250. After 250, (le)mean/D
does not follow any particular trend. The proposed explanation for this deviation
is the same as that given for Figure 4.9. Additionally, a comparison between Figure
4.9 and 4.12 shows that though (le)max/D is a maximum at α′ = 100 and afterwards
70

0
5
10
15
20
100 200 300 400
98
76
5
4
3
2
A0 = 1
α′
(le) m
ean/D
Figure 4.12. Cycle-average entrance length to diameter ratio as a function of α′
at different A0.
decreases with α′, (le)mean/D is quite low at α′ = 100 and keeps on increasing with α′.
This can be explained as follows. For all the phases of the inflow, the disturbances
generated at the entrance travel a significant distance in the pipe, hence there is
always a significant developing length during inflow. However at lower α′ (except
at 50), during the outflow there are some phases at which all the disturbances are
0
5
10
15
20
1 3 5 7 9
A0
(le) m
ean/D
Figure 4.13. Cycle-average entrance length to diameter ratio as a function of A0
for α′ = 50, × ; α′ = 100, • ; α′ = 200, + ; and α′ = 400, ◦ .
71

pushed back close to the pipe exit, hence the entrance lengths become very small
(Figure 4.6). Thus, when the entrance lengths are averaged over a complete cycle
at lower α′, (le)mean becomes small. Therefore, although the maximum entrance
length (le)max at lower α′ is higher than (le)max at higher α′, the mean entrance
length (le)mean is relatively lower at lower α′ than (le)mean at higher α′.
Figure 4.13 shows that for α′ = 50 and 100, (le)mean/D increases nonlinearly
with A0, whereas from α′ = 200 onward this increase is quite linear with small slope
difference. However, as explained above, the last two A0 values for α′ = 400 deviates
from the linear trend.
0
50
100
150
200
250
300
0 50 100 150 200 250 300
Reδ
(le) m
ean/δ
Figure 4.14. Cycle-average entrance length to Stokes-layer thickness ratio as afunction of Reδ for the range α′ from 200 to 400 and A0 from 1 to 9. The straightline represents the correlation (le)mean/δ = 0.82Reδ + 2.16.
A similar approach to that taken to collapse the (le)max data presented in Figure
4.11 is taken to bring all (le)mean/D in one trend in Figure 4.14. In Figure 4.14,
(le)mean has been scaled by δ insted of D and plotted against Reδ for the range of α′
from 150 to 400. The best fit for this trend is linear. Therefore, a linear correlation
between (le)mean/δ and Reδ can be given as (le)mean/δ = 0.82Reδ + 2.16, which is
valid for the range of α′ from 150 to 300 for 1 ≤ A0 ≤ 9 and from 300 to 400 for
1 ≤ A0 ≤ 7.
72
4.4 Summary
Unlike laminar steady pipe flow, very few studies have been conducted on the flow
development length in reciprocating pipe flow. An extensive study is done to in-
vestigate the variation of the entrance length throughout the cycle. Two different
methods with two different measured variables (uc and ∂u/∂r|w) are compared to
find out the best way to measure the entrance length. Two dimensionless num-
bers, A0 = U0/ωD and α′ = 4α2 are used as the input parameters. However, in
presenting the results an additional dimensionless number Reδ is used, which is a
function of both A0 and α′. It is found that the entrance length varies with a sinu-
soidal pattern in the cycle, making a 90◦ phase difference with the centreline velocity
(uc). The dimensionless maximum entrance length ((le)max/D) and cycle-average
entrance length ((le)mean/D) are presented as function of both α′ and A0. However,
it is found that if the entrance lengths are scaled by Stokes-layer thickness δ instead
of diameter D and plotted against Reδ, the following linear correlations are possible.
For maximum entrance length the correlation is
(le)max/δ = 1.37Reδ + 5.3,
valid for the range of α′ from 100 to 300 for 1 ≤ A0 ≤ 9, and from 300 to 400 for
1 ≤ A0 ≤ 7.
For cycle-average entrance length the correlation is
(le)mean/δ = 0.82Reδ + 2.16
valid for the range of α′ from 150 to 300 for 1 ≤ A0 ≤ 9, and from 300 to 400 for
1 ≤ A0 ≤ 7.
A potential extension of this work is to perform a stability analysis to check
the transition point to non-axisymmetric flow in reciprocating flow in a pipe with
free-ends. Additionally, a study is required to investigate the flow at lower α′ and
73

higher A0 values.
From the above study, it can be presumed that the developing length in the
OWC free-end is not negligible. Thus, it is required to measure the energy loss in
this region and incorporate into the analytical model of the OWC in Chapter 3.
74
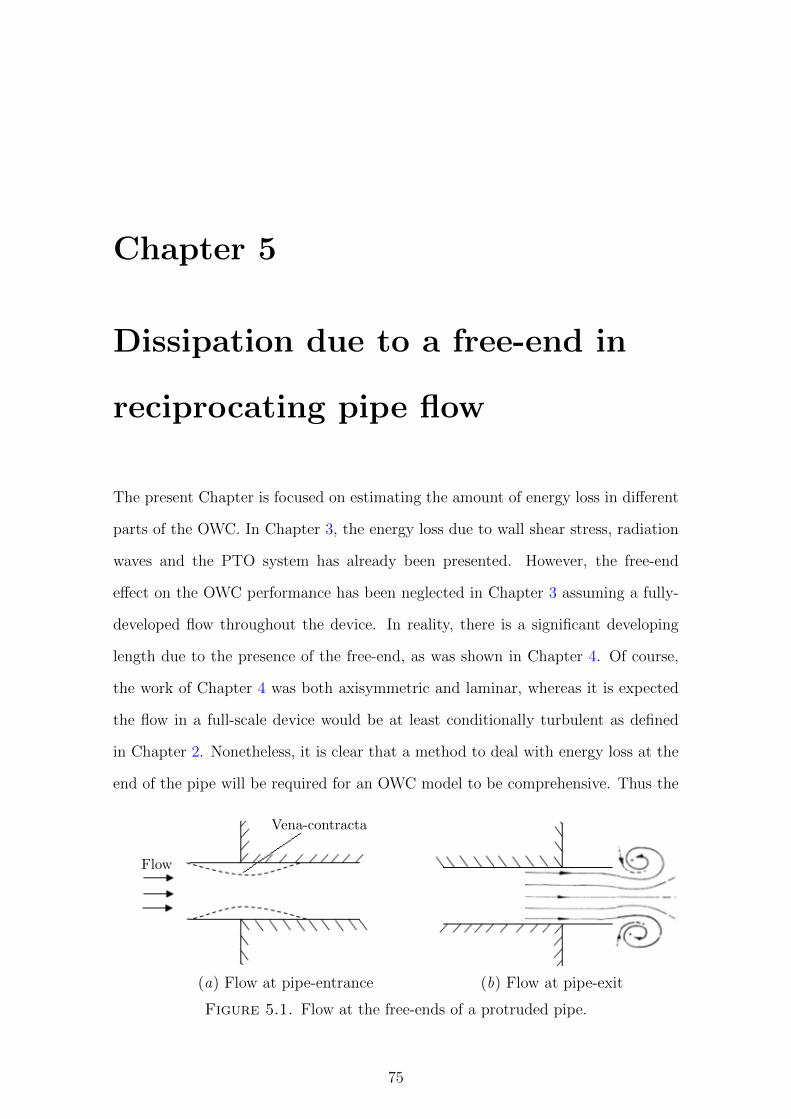
Chapter 5
Dissipation due to a free-end in
reciprocating pipe flow
The present Chapter is focused on estimating the amount of energy loss in different
parts of the OWC. In Chapter 3, the energy loss due to wall shear stress, radiation
waves and the PTO system has already been presented. However, the free-end
effect on the OWC performance has been neglected in Chapter 3 assuming a fully-
developed flow throughout the device. In reality, there is a significant developing
length due to the presence of the free-end, as was shown in Chapter 4. Of course,
the work of Chapter 4 was both axisymmetric and laminar, whereas it is expected
the flow in a full-scale device would be at least conditionally turbulent as defined
in Chapter 2. Nonetheless, it is clear that a method to deal with energy loss at the
end of the pipe will be required for an OWC model to be comprehensive. Thus the
Vena-contracta
Flow
(a) Flow at pipe-entrance (b) Flow at pipe-exit
Figure 5.1. Flow at the free-ends of a protruded pipe.
75
present Chapter deals with the energy loss due to the free-end in OWCs.
As the flow enters into the pipe through a sharp entrance, flow separation takes
place immediately after the entrance, resulting in the streamlines converging towards
the centre of the pipe. As the convergence reaches the maximum, the cross-sectional
area of the flow moving in the bulk direction becomes a minimum, which is known
as the “vena-contracta” as shown in Figure 5.1(a). Owing to continuity, for an
incompressible flow, the velocity increases and pressure decreases from the entrance
to the vena-contracta. However, from the vena-contracta to the end of the developing
region the streamlines diverge again, causing the velocity to decrease and pressure
to increase. Since the pressure gradient is favourable until the vena-contracta, loss
due to the separation is insignificant in this part. However, in the later part where
the streamlines expand, the pressure gradient is adverse; hence eddies are generated
and cause energy dissipation.
As the flow exits the pipe and enters into the reservoir, the stationary fluid in
the reservoir slows down the outer layer of the flow owing to viscosity, resulting the
formation of a vortex ring as shown in Figure 5.1(b). This vortex ring carries a
significant amount of kinetic energy, which eventually dissipates due to viscosity.
In a unidirectional pipe flow, one end of the pipe works as an entrance and the
other end works as an exit. Energy loss due to a sharp entrance or exit in this kind of
flow has been studied extensively. The loss coefficients determined from these studies
have been used in engineering problems for decades [75–77]. However, when the flow
is reciprocating, the free-ends of the pipe work as both the entrance and exit in one
complete cycle. Thus, the generation of the streamline convergence and its evolution
in one half of the cycle, and, during the other half of the cycle, the separation of
the boundary layer, causing the generation of eddies outside of the pipe, cause the
energy loss due to the free-end in reciprocating flow. Very few studies have been
conducted to measure the free-end losses in reciprocating pipe flow. Among these, it
was noted in Chapter 2 that Knott and Mackley in [11] conducted an experimental
study on the vortex formation at the mouth of a partially submerged vertical tube.
76

It was found that the separation takes place both during the inflow and the outflow.
The vortex generation and their dynamics have been analysed and presented in
detail. The cycle-average energy dissipation rate owing to the vortices generated at
the mouth and the wall shear stress were found as
˙Eew = 1.24ρAU30 , (5.1)
where ρ is the fluid density, A is the cross-sectional area and U0 is the amplitude of
the cross-sectional area averaged velocity. As noted in Chapter 2, a contemporary
experimental study by Knott and Flower [12] has shown that the total power loss
due to the wall shear stress inside the pipe and the vortices generated at the free-end
can be given by equation (2.11), repeated here as
˙Eew =1
2CU2
0 + 0.212KeρU30 , (5.2)
where C is a linear damping coefficient and Ke is the proportion of kinetic energy
being dissipated at the entrance. It has been assumed in [11] and [12] that the
linear damping term 12CU2
0 comes from the wall shear stress and radiation damping
as mentioned in Chapter 2, section 2.3.3; whereas the non-linear term 0.212KeρU30
comes from the vortices generated at the free-end.
In both [11] and [12] (mentioned above), the energy dissipation owing to the
wall shear stress and free-end was measured. Since the submergence depth of the
tubes in both these experimental studies was small, the contribution of the wall
shear stress loss to the overall loss was very small. Therefore, it was mentioned that
the measured loss of energy is due to the free-end only, though the total loss was
measured, which includes a contribution from both the wall shear stress and free-end
loss. These experiments were conducted for high Womersley number α = 12D√ω/ν
and for low area-average velocity amplitude A0 = U0/(ωD). The aim of the work
in this Chapter is to measure the wall shear stress and free-end losses separately in
reciprocating pipe flow and to quantify them for a range of α and A0. The direct
77

numerical simulation (DNS) code which has been used in Chapter 4 to measure
the developing length, is used in this Chapter to measure the energy loss. Since
the code works perfectly for the laminar flow (as validated in section 4.1 and as
will be validated again in this Chapter), the results presented here are confined
within the laminar regime. Of course, this means that only the results of Chapter
3 are applicable to a full-scale OWC in which the flow may be expected to include
conditional turbulence. However, the present Chapter introduces a methodology
applicable to any future numerical or experimental measurement, further improving
the ultimate OWC model.
5.1 Formulation
In this section, the dimensionless energy equation is derived, and applied to a specific
control volume which is used to measure the free-end loss in reciprocating pipe flow.
The integral form of the momentum conservation equation for an arbitrary con-
trol volume of volume V is
∫V
ρ∂ui∂t
dV +
∫V
ρuj∂ui∂xj
dV =
∫V
ρgi dV −∫V
∂p
∂xidV +
∫V
∂τij∂xj
dV. (5.3)
Multiplying equation (5.3) by ui, and applying continuity for incompressible flow,
i.e. ∂ui/∂xi = 0, to the resultant equation, gives the mechanical energy equation as
∫V
∂
∂t
(1
2ρu2
i
)dV +
∫V
∂
∂xj
(uj
1
2ρu2
i
)dV =
∫V
ρuigi dV −∫V
∂
∂xi(pui) dV
+
∫V
[∂
∂xj(τijui) dV − τij
∂ui∂xj
]dV. (5.4)
Applying Gauss’ theorem to equation (5.4) gives
∫V
∂
∂t
(1
2ρu2
i
)dV +
∫A
1
2ρu2
iuj dAj =
∫V
ρuigi dV −∫A
pui dAi
+
∫A
τijui dAj −∫V
τij∂ui∂xj
dV, (5.5)
78

where the subscript A indicates an integral over the domain surface, and the sub-
script V indicates an integral over the domain volume. The viscous shear stress, τij
for Newtonian incompressible fluids is connected to the strain as,
τij = 2µeij, (5.6)
where the strain eij is the symmetric part of the tensor ∂ui/∂xj, i.e.,
eij =1
2
(∂ui∂xj
+∂uj∂xi
).
The variables in energy equation are scaled as follows to obtain the dimensionless
equation,
x∗i =xiD, u∗i =
uiU0
, t∗ =tU0
Dand p∗ =
p
ρU20
,
where “ ∗ ” represents the non-dimensional variables, D is the pipe diameter, U0 is
the cross-sectional mean velocity amplitude and ρ is the fluid density. Introducing
the non-dimensional variables into equation (5.5) gives
ρU30D
2
∫V
∂
∂t∗
(1
2u∗i
2
)dV ∗ + ρU3
0D2
∫A
1
2u∗i
2u∗j dA∗j = ρU0D
3
∫V
u∗i gi dV∗
−ρU30D
2
∫A
p∗u∗i dA∗i + µU2
0D
∫A
2e∗iju∗i dA
∗j − µU2
0D
∫V
2e∗ije∗ij dV
∗. (5.7)
Dividing the above equation (5.7) by ρU30D
2 and removing the “∗”s give the dimen-
sionless energy equation as,
∫V
∂
∂t
(1
2u2i
)dV +
∫A
1
2u2iuj dAj =
DgiU2
0
∫V
ui dV −∫A
pui dAi
+1
4A0α2
∫A
2eijui dAj −1
4A0α2
∫V
2eijeij dV, (5.8)
where (as mentioned earlier) A0 = U0/ωD and α =D
2
√ω/ν; and ω is the oscillation
frequency.
Figure 5.2 shows the geometry that is used to investigate the energy loss. In it
79

Figure 5.2. Schematic diagram of the geometry.
a long pipe connects the two reservoirs, where the pipe-ends are extended into the
reservoirs. All the dimensions are scaled by the diameter of the pipe. A sinusoidal
volume flow rate is maintained at the inlet/outlet boundary to generate the recipro-
cating flow. Since the flow is being investigated in a horizontal pipe and the impact
of the weight of the fluid on the energy distribution is assumed negligible, the body
force can be considered to be zero, i.e., gi = 0.
A control volume marked by the dotted lines in Figure 5.3 is considered to
measure the loss in the pipe. On the control surfaces which are along the walls
the strain tensor eij 6= 0, however the velocity ui = 0 due to the no slip boundary
condition. Therefore at the walls, eijui = e.u = 0. Additionally, on the right-most
vertical control surface, a parallel flow is imposed; thus on this control surface the
radial component of the velocity, v = 0. On the left-most vertical control surface,
the flow is parallel owing to the fully developed condition; thus v = 0 on this control
surface as well. Hence, on these two control surfaces, eijui = e.u = 0. Therefore the
summation of eijui on all the control surfaces becomes zero, i.e.,∫Aeijui dAj = 0.
The energy equation for the control volume in Figure 5.3 can therefore be written
→↑ x
r
Figure 5.3. Control volume to investigate the free-end loss.
80

as
∫V
∂
∂t
(1
2u2i
)dV +
∫A
1
2u2iuj dAj = −
∫A
pui dAi −1
4A0α2
∫V
2eijeij dV. (5.9)
Rearranging equation (5.9) gives
1
4A0α2
∫V
2eijeij dV = − ∂
∂t
∫V
(1
2u2i
)dV −
∫A
(p+
1
2u2i
)ui dAi. (5.10)
In the above equation the left hand side is the dissipation term which is responsible
for the irreversible conversion of the kinetic energy to internal energy because of the
viscosity. Assuming axisymmetric flow, the viscous dissipation per unit volume in
cylindrical co-ordinates, Φ, can be given as
Φ =2eijeij4A0α2
=1
4A0α2
[2
(∂v
∂r
)2
+ 2(vr
)2
+ 2
(∂u
∂x
)2
+
(∂v
∂x+∂u
∂r
)2], (5.11)
where u and v are the velocity components in the x and r co-ordinates respectively.
The first term on the right hand side of equation (5.10) is the rate of change of
kinetic energy in the control volume. In two dimensional cylindrical co-ordinates
the system kinetic energy per unit volume can be given as
1
2u2i =
1
2(u2 + v2). (5.12)
The last term in equation (5.10) represents the summation of pressure and kinetic
energy fluxes across the control surfaces. For axisymmetric flow this term can be
given as
∫A
(p+
1
2u2i
)ui dAi =
∫Aout
[p+
1
2(u2 + v2)
]u dAx
−∫Ain
[p+
1
2(u2 + v2)
]u dAx, (5.13)
where Ain and Aout are the control surface areas through which the energy is coming
into and going out from the control volume and x denotes the normal direction of
81
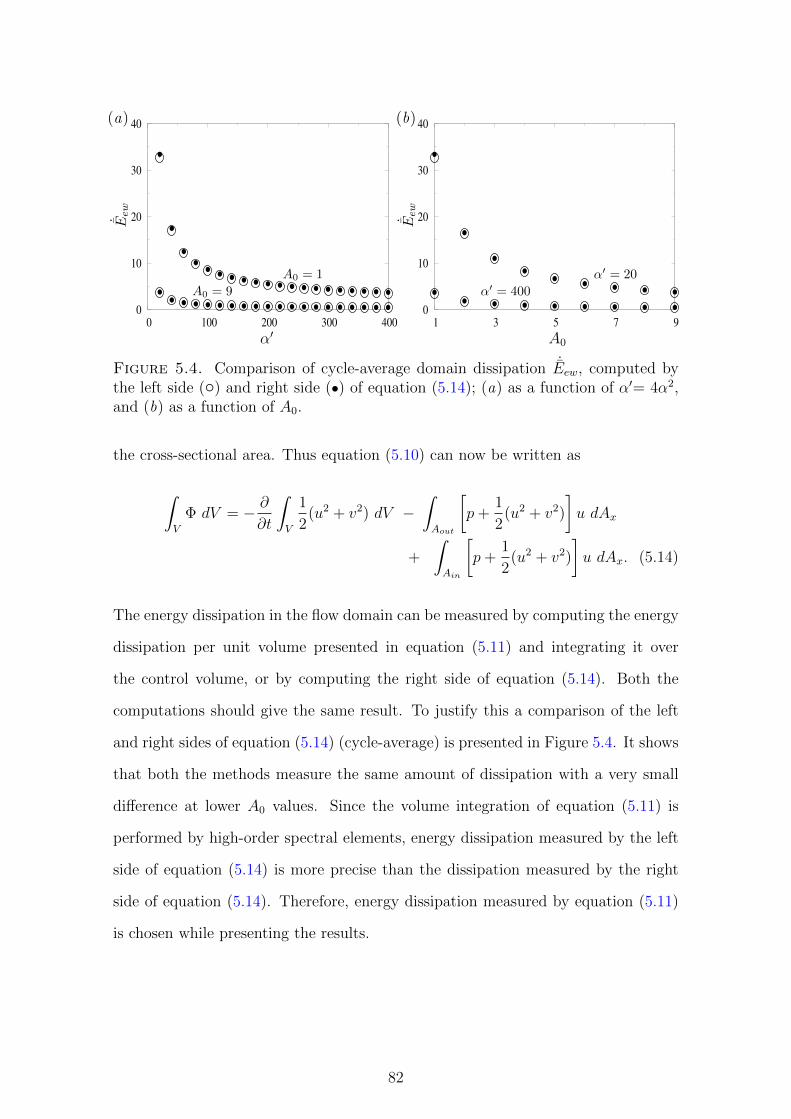
0
10
20
30
40
0 100 200 300 400
0
10
20
30
40
1 3 5 7 9
A0 = 9
A0 = 1
α′ = 400
α′ = 20
α′ A0
˙ Eew ˙ Eew
(a) (b)
Figure 5.4. Comparison of cycle-average domain dissipation ˙Eew, computed bythe left side (◦) and right side (•) of equation (5.14); (a) as a function of α′= 4α2,and (b) as a function of A0.
the cross-sectional area. Thus equation (5.10) can now be written as
∫V
Φ dV = − ∂
∂t
∫V
1
2(u2 + v2) dV −
∫Aout
[p+
1
2(u2 + v2)
]u dAx
+
∫Ain
[p+
1
2(u2 + v2)
]u dAx. (5.14)
The energy dissipation in the flow domain can be measured by computing the energy
dissipation per unit volume presented in equation (5.11) and integrating it over
the control volume, or by computing the right side of equation (5.14). Both the
computations should give the same result. To justify this a comparison of the left
and right sides of equation (5.14) (cycle-average) is presented in Figure 5.4. It shows
that both the methods measure the same amount of dissipation with a very small
difference at lower A0 values. Since the volume integration of equation (5.11) is
performed by high-order spectral elements, energy dissipation measured by the left
side of equation (5.14) is more precise than the dissipation measured by the right
side of equation (5.14). Therefore, energy dissipation measured by equation (5.11)
is chosen while presenting the results.
82

5.2 Validation
The DNS code described in Appendix C is validated by comparing the numerical
results with analytical results for cycle-average friction coefficient Cf (presented
below) and energy dissipation ˙Eew (defined next page) in the fully developed region.
The theoretical axial velocity gradient across the pipe,∂u
∂rfor a fully developed
reciprocating flow is obtained after a slight modification (to account for the pure
reciprocating case with a zero mean flow) of Uchida’s solution presented in [32].
Thus,∂u
∂rin the fully developed region of a laminar reciprocating pipe flow can be
given as
∂u
∂r=
4νA0α3
D√
(α− 2C1)2 + 4C22
bei(α)∂
∂rber(2αr)− ber(α)
∂
∂rbei(2αr)
ber2(α) + bei2(α)cos(ωt)
−ber(α)
∂
∂rber(2αr) + bei(α)
∂
∂rbei(2αr)
ber2(α) + bei2(α)sin(ωt)
, (5.15)
where
C1 =ber(α)
d
dαbei(α)− bei(α)
d
dαber(α)
ber2(α) + bei2(α), C2 =
ber(α)d
dαber(α) + bei(α)
d
dαbei(α)
ber2(α) + bei2(α);
where ‘ber’ and ‘bei’ are the Kelvin functions. Equation (5.15) is used to calculate
the analytical wall friction coefficient as,
Cf (t) =µ∂u
∂r
∣∣∣w
1
2ρU2
0
, (5.16)
and hence the cycle-average wall friction coefficient can be calculated as Cf =
1
T
∫ T
0
Cf (t)dt. Equation (5.15) is further used to calculate the dimensionless en-
ergy dissipation in the fully developed region as
Eew =
∫V
1
4A0α2
(∂u
∂r
)2
dV, (5.17)
83

0
0.05
0.1
0.15
0.2
0 100 200 300 400
0
0.05
0.1
0.15
0.2
0.25
0 100 200 300 400
α′ α′
Cf ˙ Eew
(a) (b)
Figure 5.5. Comparison between theoretical results (◦) and simulation results (•)of (a) wall friction coefficient Cf and (b) domain energy dissipation ˙Eew, as a functionof α′ = 4α2 for A0 = 3.
and hence the cycle-average dissipation as, ˙Eew =1
T
∫ T
0
Eew(t)dt.
While presenting the results, as in Chapter 4, α′ = 4α2 is used instead of α to
avoid fractional numbers. Comparison between the theoretical results and simula-
tion results are presented in Figure 5.5. It shows that for both the cycle-average
wall-friction coefficient Cf and the cycle-average energy dissipation ˙Eew, the DNS
code computes the exact values.
5.3 Results
As noted earlier, there are few works available in the literature which reported
experimental studies to investigate the free-end loss in reciprocating pipe flow i.e.,
[11, 12]. However in experiments, it is difficult to measure the wall shear stress
and the free-end losses separately. Thus the results presented in the previous works
are in fact the combination of both the losses. In the present work, an approach
is taken to present the wall shear stress loss and free-end loss individually, and
make a comparison between them. Loss of energy is presented for the entire flow
domain (Figure 5.3), for the wall shear stress inside the pipe and for the free-end.
Furthermore, the loss due to the vortices generated outside the pipe is also presented.
84

5.3.1 Energy loss in the entire domain, ˙Eew
Figure 5.6 shows the dimensionless cycle-average energy loss in the flow domain. It
includes the energy loss due to shear stress inside the pipe and the loss due to the
free-end; i.e., ˙Eew = ˙Ew + ˙Ee. The domain loss ˙Eew is presented as a function of α′
in (a), as a function of A0 in (b), as a function of 1/(A0α′) in (c) and as a function
of 1/(A0α′0.75) in (d). From (a), it can be seen that ˙Eew decreases with the increase
of α′ for different A0. The difference between ˙Eew values measured at different A0
also decreases with the increase of α′. Figure 5.6(b) shows that the same phenomena
happens when ˙Eew is plotted against A0 for different α′. Since the dimensionless
energy dissipation presented in equation (5.11) is a function of 1/(A0α′), ˙Eew is
0
4
8
12
0 100 200 300 400
A0 = 3 ×A0 = 5 •A0 = 9 ◦
0
3
6
9
1 3 5 7 9
α′ = 100 —×—α′ = 200 —•—α′ = 300 —◦—
α′ A0
˙ Eew ˙ Eew
(a) (b)
0
10
20
30
40
0 0.01 0.02 0.03 0.04 0.05
0
10
20
30
40
0 0.02 0.04 0.06 0.08 0.1 0.12
1/A0α′
˙ Eew
1/A0α′0.75
˙ Eew
(c) (d)
Figure 5.6. Cycle-average energy dissipation in the entire domain, ˙Eew; (a) as afunction of α′, (b) as a function of A0, (c) as a function of 1/(A0α
′) and (d) as afunction of 1/(A0α
′0.75). The straight dashed line in (d) represents the correlation˙Eew = 291.05/(A0α
′0.75) + 0.035.
85

plotted against 1/(A0α′) in (c). It shows that ˙Eew follows two different linear trends
with 1/(A0α′). However, all the ˙Eew values collapse to a single linear trend when
they are plotted as a function of 1/(A0α′0.75), as shown in (d). Hence, the correlation
between ˙Eew and 1/(A0α′0.75) can be given as ˙Eew = 291.05/(A0α
′0.75) + 0.035.
5.3.2 Energy loss due to a fully developed flow throughout
the pipe, ˙Ew
In this section, the energy loss due to the wall shear stress inside the pipe ˙Ew is
presented, assuming that the flow is fully developed throughout the pipe, i.e., there
is no free-end effect inside the pipe (which might be possible if the mouth of the
pipe is designed as a bell mouth). The dimensionless cycle-average shear stress
loss, ˙Ew, is plotted in Figure 5.7; as a function of α′ in (a), as a function of A0 in
(b), as a function of 1/(A0α′) in (c) and as a function of 1/(A0α
′0.75) in (d). The
percentage contribution of ˙Ew to the ˙Eew is plotted as a function of 1/(A0α′0.5) in
(e). From (a) and (b), it can be seen that ˙Ew decreases with the increase of both
α′ and A0. Like ˙Eew, ˙Ew follows two distinct linear trends with 1/(A0α′) as shown
in (c). However, (d) shows that all the data collapse to a single trend when ˙Ew is
plotted against 1/(A0α′0.75). Hence the correlation between ˙Ew and 1/(A0α
′0.75) can
be established as ˙Ew = 276.15/(A0α′0.75) + 0.02. Finally, (e) shows the contribution
of ˙Ew to the entire domain loss ˙Eew. At lower A0α′0.5, almost all the loss in the
domain is from ˙Ew. However, as A0α′0.5 increases, this domination of ˙Ew in the
domain loss decreases. As 1/(A0α′0.5) decreases below 0.05, the contribution of ˙Ew
drops drastically. Since the pipe is long, even after this rapid drop, the wall shear
stress loss ˙Ew still dominates at lower 1/(A0α′0.5) values.
5.3.3 Energy loss due to the free-end, ˙Ee
If it is assumed that the free-end does not have any effect on the flow (i.e., no
generation of vortices during inflow or outflow due to the free-end), then the total
loss of energy in the flow domain is due the shear stress loss inside the pipe only,
86

0
4
8
12
0 100 200 300 400
A0 = 3 ×A0 = 5 •A0 = 9 ◦
0
3
6
9
1 3 5 7 9
α′ = 100 —×—α′ = 200 —•—α′ = 300 —◦—
α′ A0
˙ Ew ˙ Ew
(a) (b)
0
10
20
30
40
0 0.01 0.02 0.03 0.04 0.05
0
10
20
30
40
0 0.02 0.04 0.06 0.08 0.1 0.12
1/A0α′
˙ Ew
1/A0α′0.75
˙ Ew
(c) (d)
80
85
90
95
100
0 0.05 0.1 0.15 0.2 0.25
˙ Ew/
˙ Eew
(%)
1/A0α′0.5
(e)
Figure 5.7. Cycle-average energy dissipation inside the pipe due to shear stress
assuming fully developed flow, ˙Ew; (a) as a function of α′, (b) as a function of A0, (c)as a function of 1/(A0α
′) and (d) as a function of 1/(A0α′0.75). (e) The percentage
contribution of ˙Ew in ˙Eew as a function of 1/(A0α′0.5). The straight dashed line in
(d) represents the correlation ˙Ew = 276.15/(A0α′0.75) + 0.02.
which were studied in Chapter 3, i.e., ˙Eew = ˙Ew. However, the inclusion of the
free-end effect in the system increases the overall loss in the domain; hence ˙Eew can
87

0.05
0.1
0.15
0.2
0.25
0 100 200 300 400
A0 = 3 ×A0 = 5 •A0 = 9 ◦
0.08
0.1
0.12
0.14
0.16
0.18
1 3 5 7 9
α′ = 100 —×—α′ = 200 —•—α′ = 300 —◦—
α′ A0
˙ Ee ˙ Ee
(a) (b)
0.05
0.1
0.15
0.2
0.25
0.3
0 0.01 0.02 0.03 0.04 0.05
0.05
0.1
0.15
0.2
0.25
0.3
0 0.01 0.02 0.03 0.04 0.05
1/A0α′
˙ Ee
1/A0.330 α′
˙ Ee
(c) (d)
0.05
0.1
0.15
0.2
0.25
0 0.01 0.02 0.03 0.04
1/A0.330 α′
0
5
10
15
20
0 0.05 0.1 0.15 0.2 0.25
1/A0α′0.5
(e) (f )
˙ Ee/
˙ Eew
(%)
˙ Ee
Figure 5.8. Cycle-average energy dissipation due to the free-end, ˙Ee; (a) as afunction of α′, (b) as a function of A0, (c) as a function of 1/(A0α
′), (d) as afunction of 1/(A0.33
0 α′) and (e) as a function of 1/(A0.330 α′) for A0 > 1. (f ) The
percentage contribution of ˙Ee in ˙Eew as a function of 1/(A0α′0.5). The dashed line
in (d) represents the correlation ˙Ee = 1/[1 + 1.16(A0.330 α′)0.33].
be expressed as ˙Eew = ˙Ew + ˙Ee, where ˙Ee is the loss due to the free-end. Values of
˙Eew and ˙Ew have been evaluated and already presented in section 5.3.2 and 5.3.4.
In this section the free-end loss ˙Ee is presented. It is evaluated by subtracting ˙Ew
88
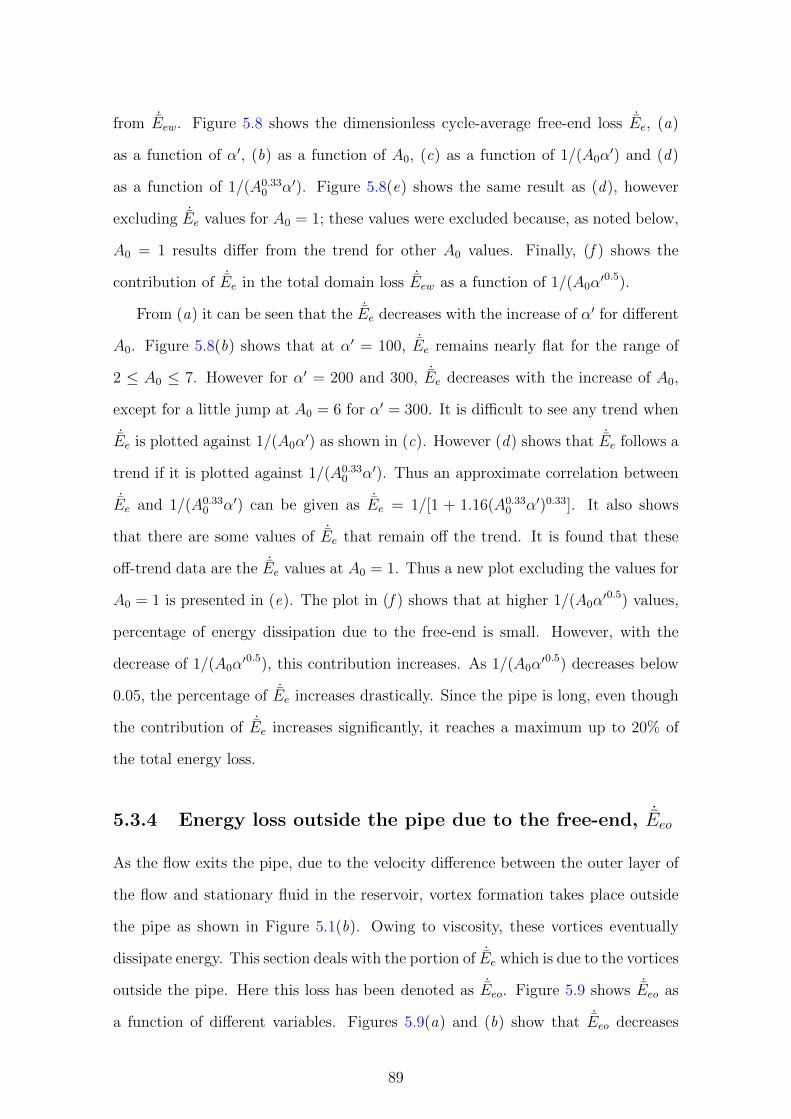
from ˙Eew. Figure 5.8 shows the dimensionless cycle-average free-end loss ˙Ee, (a)
as a function of α′, (b) as a function of A0, (c) as a function of 1/(A0α′) and (d)
as a function of 1/(A0.330 α′). Figure 5.8(e) shows the same result as (d), however
excluding ˙Ee values for A0 = 1; these values were excluded because, as noted below,
A0 = 1 results differ from the trend for other A0 values. Finally, (f ) shows the
contribution of ˙Ee in the total domain loss ˙Eew as a function of 1/(A0α′0.5).
From (a) it can be seen that the ˙Ee decreases with the increase of α′ for different
A0. Figure 5.8(b) shows that at α′ = 100, ˙Ee remains nearly flat for the range of
2 ≤ A0 ≤ 7. However for α′ = 200 and 300, ˙Ee decreases with the increase of A0,
except for a little jump at A0 = 6 for α′ = 300. It is difficult to see any trend when
˙Ee is plotted against 1/(A0α′) as shown in (c). However (d) shows that ˙Ee follows a
trend if it is plotted against 1/(A0.330 α′). Thus an approximate correlation between
˙Ee and 1/(A0.330 α′) can be given as ˙Ee = 1/[1 + 1.16(A0.33
0 α′)0.33]. It also shows
that there are some values of ˙Ee that remain off the trend. It is found that these
off-trend data are the ˙Ee values at A0 = 1. Thus a new plot excluding the values for
A0 = 1 is presented in (e). The plot in (f ) shows that at higher 1/(A0α′0.5) values,
percentage of energy dissipation due to the free-end is small. However, with the
decrease of 1/(A0α′0.5), this contribution increases. As 1/(A0α
′0.5) decreases below
0.05, the percentage of ˙Ee increases drastically. Since the pipe is long, even though
the contribution of ˙Ee increases significantly, it reaches a maximum up to 20% of
the total energy loss.
5.3.4 Energy loss outside the pipe due to the free-end, ˙Eeo
As the flow exits the pipe, due to the velocity difference between the outer layer of
the flow and stationary fluid in the reservoir, vortex formation takes place outside
the pipe as shown in Figure 5.1(b). Owing to viscosity, these vortices eventually
dissipate energy. This section deals with the portion of ˙Ee which is due to the vortices
outside the pipe. Here this loss has been denoted as ˙Eeo. Figure 5.9 shows ˙Eeo as
a function of different variables. Figures 5.9(a) and (b) show that ˙Eeo decreases
89

0.05
0.1
0.15
0.2
0.25
0 100 200 300 400
A0 = 3 ×A0 = 5 •A0 = 9 ◦
0.05
0.1
0.15
0.2
1 3 5 7 9
α′ = 100 —×—α′ = 200 —•—α′ = 300 —◦—
α′ A0
˙ Eeo ˙ Eeo
(a) (b)
0.05
0.1
0.15
0.2
0.25
0.3
0 0.01 0.02 0.03 0.04 0.05
0.05
0.1
0.15
0.2
0.25
0.3
0 0.01 0.02 0.03 0.04 0.05
1/A0α′
˙ Eeo
1/A0.330 α′
˙ Eeo
(c) (d)
0
3
6
9
12
0 0.1 0.2 0.3 0.4
˙ Eeo/
˙ Eew
(%)
1/A0α′0.33
(e)
Figure 5.9. Cycle-average energy dissipation outside the pipe due to the free-end,˙Eeo; (a) as a function of α′, (b) as a function of A0, (c) as a function of 1/(A0α
′)and (d) as a function of 1/(A0.33
0 α′). (e) The percentage contribution of Eeo in˙Eew as a function of 1/(A0α
′0.33). The dashed line in (d) represents the correlation˙Eeo = 1/[1 + 0.74(A0.33
0 α′)0.45].
with the increase of α′ and A0. It is difficult to see a clear trend if ˙Eeo is plotted
against 1/(A0α′), as shown in (c). However, (d) shows that a trend can be found if
90

it is plotted as a function of 1/(A0.330 α′). The dashed line represents the correlation
between ˙Eeo and 1/(A0.330 α′) as, ˙Eeo = 1/[1 + 0.74(A0.33
0 α′)0.45]. From Figure 5.9(d)
it is apparent that this correlation works better at lower 1/(A0.330 α′) values than the
higher values. Figure 5.9(e) shows the percentage contribution of ˙Eeo in the total
dissipation ˙Eew as a function of 1/(A0α′0.33). It can be seen that the contribution of
˙Eeo increases with the increase of A0α′0.33. It means that with the increase of either
A0 or α′, the dissipation due to the vortices generated outside the pipe increases.
5.3.5 Vorticity and energy dissipation fields around the free-
end
To demonstrate how the free-end contributes to the energy loss in the reciprocating
flow system, the generation and evolution of vortices near the free-end and energy
dissipation due to them on a sectional plane are presented in Figure 5.10, for α′ = 400
and A0 = 3. It shows the contours of vorticity on the left and contours of energy
dissipation rate Φ on the right. Since the contours of vorticity are presented on
a sectional plane, the vortices near the upper wall is opposite in direction to the
vortices neat the lower wall. In Figure 5.10(left), red colour represents the positive
vortices and blue colour represents the negative vortices. It can be seen that as the
flow exits the pipe, the stationary fluid in the reservoir detaches the outer layer of
the fast moving fluid that comes out from the pipe, owing to the viscosity. At the
phase of φ = π/3, a small negative vortex ring is already formed at the tip of that
detached fluid. As more fluid comes out of the pipe, a bigger positive vortex ring is
formed and the initially formed small ring separates from the bigger one (φ = 2π/3).
With time, the bigger vortex ring propagates further away from the free-end, while
the negative smaller one remains close to the free-end (φ = π). As the flow alters
direction, the smaller vortex ring is pushed back into the pipe, however the bigger
ring continues its journey away from the free-end (φ = 4π/3). During the inflow,
owing to the sharp entrance, vortices are formed at the free-end, however with the
opposite direction to vortices that were generated during the outflow. The intensity
91

φ = π/3
2π/3
π
4π/3
5π/3
2π
Figure 5.10. Contours of vorticity (left) and energy dissipation (right) at the free-end, for α′ = 400 and A0 = 3, at various oscillation phases φ. Red and blue colourson the vorticity contour represent positive and negative vortices respectively.
92

of vortices keeps on increasing in the first few diameters of pipe length throughout
the inflow. However, all these negative inside vortices are pushed towards of the
free-end as the outflow starts (φ = 5π/3) and eventually they are driven out to
generate another set of vortex rings outside the pipe (φ = 2π).
From the dissipation fields (Figure 5.10 (right)) it can be seen that during the
outflow most of the dissipation inside the pipe takes place near the wall due to
the wall shear stress, and this dissipation is quite uniform throughout the pipe
(φ = π/3). Outside the pipe, most of the dissipation takes place due to the shear
between the stationary fluid in the reservoir and the moving fluid from the pipe.
Hence, the dissipation caused by the outside vortices is due to the shear between the
outer part of the vortices and reservoir fluid, and also due to the shear between the
fluid layers inside the vortices themselves. However, as the vortex ring propagates
further away from the free-end, it becomes weaker; thus the dissipation by the vortex
ring also decreases. In fact within a few diameters downstream from the free-end,
the vortices becomes so weak that the dissipation caused by the vortices becomes
insignificant. During the inflow (from φ = π to 5π/3), the flow separates from the
wall due to the sharp entrance, thus the dissipation takes place due to the shear
between fluid layers (a bit above the wall) but not in the actual wall shear layer. As
the flow crosses the “vena-contracta”, it gets attached to the wall and the dissipation
takes place due to the wall shear stress.
5.3.6 Comparison between ˙Ew and ˙Ee for different pipe
lengths
In the present work, the losses are investigated in a control volume which consists
a 50-diameter long pipe, as shown in Figure 5.3. It can be seen from Figure 5.10
that after a few diameters length from the free-end, dissipation due to the wall
shear stress is uniform. Due to this uniform dissipation, the amount of dissipation
increases linearly with the pipe length. Thus the result presented in Figure 5.7(e)
shows that ˙Ew is the dominating loss in the domain. However, the free-end loss
93

0
20
40
60
80
100
0 0.05 0.1 0.15 0.2
lc/D= 50
10
5
50
10
5
˙Ew •˙Ee ◦
˙ E/
˙ Eew
(%)
1/Reδ
Figure 5.11. Comparison between the contribution of dissipations from the wall
shear stress (assuming fully developed flow) ˙Ew and from the free-end ˙Ee to the
overall domain dissipation ˙Eew as a function of 1/Reδ for different pipe lengths.
remains constant regardless of the length of the pipe, hence ˙Ee is always less than
˙Ew (Figure 5.8(f )). While calculating ˙Ew it has been assumed that the flow is fully
developed throughout the pipe. On the same assumption, ˙Ew is computed for 10
and 5 diameters from the free-end and presented as a percentage of ˙Eew in Figure
5.11 along with the result for a 50-diameter long pipe. Results are presented as
a function of 1/Reδ, where Reδ = 2√
2A0α. On the same plot, the free-end loss
˙Ee in terms of the percentage of ˙Eew is presented for 50, 10 and 5 diameter long
pipes. While computing, it has been assumed that ˙Ee remains unaffected with the
change of the pipe length. This comparison shows that as the pipe gets shorter, the
contribution of the ˙Ee to the total loss ˙Eew increases. For a five-diameter long pipe,
the contribution of ˙Ee to the ˙Eew increases such an extent that as Reδ goes above
80, ˙Ee becomes the dominating loss in the domain. For many OWCs that have been
constructed, those discussed in Chapter 1, the equivalent of the “pipe” length to
diameter ratio is closer to five than to ten.
94

5.3.7 The total dissipation ˙Eew as a function of A0 at low
and high α′
Figure 5.12 shows ˙Eew as a function of A0 at α′ = 100, 200 and 3.57×104. Results for
α′ = 100 and 200 have been taken from the present study, whereas for α′ = 3.57×104
results have been taken from the experimental study presented in [12]. It can be
seen that ˙Eew shows a similar trend with A0 for both low and high α′ values. Like in
Figure 5.6(b), ˙Eew in Figure 5.12 decreases with both A0 and α′. However, though
there is a big jump in α′ (from 400 to 3.57 × 104), the difference in corresponding
˙Eew values is very small, specially for A0 > 0.8.
0
0.5
1
1.5
2
2.5
0.2 0.4 0.6 0.8 1 1.2 1.4
A0
˙ Eew
α′ = 100 —×—α′ = 400 —◦—
α′ = 3.57× 104 —•— [12]
Figure 5.12. Cycle-average total dissipation ˙Eew in a domain with a 2.3-diameterlong pipe (to match the length of the pipe of [12]), as a function of A0 at low α′
(from simulation) and at high α′ (from experiment [12]).
5.4 Summary
Entrance and exit losses in unidirectional pipe flow have been studied rigorously in
the literature and the evaluated loss coefficients are universally accepted. However,
in reciprocating pipe flow, the free-end loss has not been studied to the extent in
the literature that a correlation can be established between the loss and the flow
95

variables. Thus, in the present work an extensive study is conducted to investigate
the cycle-average losses in reciprocating pipe flow. A dimensionless energy equation
is derived for a control volume to evaluate the dissipation term, which is then used
to calculate the losses. Energy losses in different areas of the flow domain along with
the loss in the entire domain are measured. The cycle-average losses are presented
as a function of A0 = U0/ωD and α′ = 4α2. It is found that the dominant loss
is due to the shear stress in the pipe when the pipe is long. However if the pipe
gets shorter, the domination of the inside-pipe shear stress loss decreases and the
contribution of the free-end loss to the overall loss increases. It is found that if the
pipe is 5 diameters long, for Reδ = 2√
2A0α > 80, the free-end loss is more than the
inside-pipe shear stress loss. Additionally, the generation of the vortex rings during
the outflow and their dynamics have been visualised and explained. The energy loss
due to the vortices outside the pipe has also been measured and presented. Finally,
the energy loss measured in [12] has been plotted with the results from the present
study. It is found that the variation of the energy dissipation at α′ = 400 and
3.57×104 is very small for A0 > 0.8. Since a short pipe has been used (2.3 diameter
long) to measure the loss in [12], it can be assumed that the most of the loss is due
to the free-end. It can be anticipated that with the increase of α′ the free-end loss
would not change much. Thus, to estimate the free-end loss in the OWCs where
A0 > 0.8, results for α′ = 400 can be used.
A future work would be to use the same methodology to compute the losses in
conditionally turbulent flows.
96

Chapter 6
Analytical models of a tuned
Oscillating Water Column
In this chapter, the analytical models for a fixed-type tuned Oscillating Water Col-
umn (OWC) device are derived, incorporating the losses due to shear stress (viscous
and turbulent), radiation wave and the free-end. This is intended to be an example
illustrating one application of the research in the preceding chapters. It is expected
that the OWCs will resonate at the incident wave frequencies to ensure maximum
amount of power extraction. This is possible when the natural frequency of the
device coincides with the incident wave frequency. However, wave frequency varies
within a significant range. Therefore to maintain the resonance condition, it may
be beneficial to have a tuning mechanism which will adjust the natural frequency of
the device to the wave frequency. As mentioned in Chapter 2, section 2.2.2, several
tuning mechanisms have been proposed for fixed type OWCs, such as a variable
volume air compression chamber in a seawater pump [28] and the U-OWC device
[33]. The present work incorporates the idea of a variable volume air-compression
chamber as the tuning system in an OWC, which is shown in Figure 6.1. This
air-compression chamber divides the water column into two individual oscillating
masses (Figure 6.1(b)); hence two modes of oscillation are expected inside the de-
vice. The first mode of oscillation is like a pendulum, where both the water columns
97

Pressure controller
Turbine
(a) (b)
Figure 6.1. OWC with an air-compression chamber; (a) Schematic diagram, (b)Water (green) and air (grey) zones in the device.
and the trapped air oscillates as a whole body, and the second mode is like a spring
oscillation, where the air in the air-compression chamber works as a spring, allowing
the two water columns to oscillate against each other. Depending on the frequency
of the incident wave, the pressure of air in the air-compression chamber can be
changed by a pressure controller system, which will adjust the natural frequency of
the device by changing the water column lengths. Thus the device will continuously
resonate regardless of the outside condition.
The prime factor that determines the amount of power extraction from a res-
onating OWC is the dissipation in the system. For a highly damped oscillator the
power extraction would not be significantly greater at resonance than non-resonant
cases. In such situations, tuning the system frequency to the wave frequency is not
effective. Therefore identifying the damping sources and modelling them properly
to estimate the power output is one of the most important design prerequisites.
In this chapter, the viscous and turbulent shear stress, and the radiation damping
are incorporated in the equations of motion of the water columns from Chapter 3.
Furthermore, the damping at the device free-end, which is estimated from a direct
numerical simulation of reciprocating pipe flow in Chapter 5, is incorporated into the
equations of motion. The equation for the power take-off (PTO) system is derived
98

in the same manner as the equation for the PTO system of a single water column
device, which has been derived in Chapter 3.
6.1 Formulation
If the instantaneous vertical displacement of the water column from its equilibrium
position is ξ, the equation of motion for a single water column in a fixed OWC can
be expressed, as in section 3.1, as,
(m+ αrd)ξ + βξ + ρwgSξ + fPTO = fd, (6.1)
where m is the mass of the water column, αrd is the added mass due to water outside
the mouth that is also set into motion, β is the damping coefficient, ρw is the water
density, g is the acceleration due to gravity, S is the free surface area of the water
column, fPTO is the force due to the PTO system and fd is the driving force from the
incident waves. The damping coefficient β in equation (6.1) represents the radiation
damping (βrd, due to the waves radiating outward from the device), the wall shear
stress damping (βtb and βlm) and the free-end damping (βfe).
Here, a mass-spring-damping model (equation 6.1) for each water column of the
tuned OWC is derived from the governing fluid dynamics equations that includes βrd,
βtb and βfe. For convenience, the variables in the mass and momentum conservation
equations are scaled to get the dimensionless equations.
The lengths in the cylindrical co-ordinate system, x∗i = (x∗, r∗, φ) are scaled as
follows,
x∗i = Dxi,
where “*” represents dimensional quantities and D is the diameter of the device.
Time, velocity and pressure are scaled with the bar representing the mean flow,
99

while primes represent fluctuating variables as follows,
t∗ = ω−1t,
u∗i = ωD(Ui + u′i
), (6.2)
p∗ = ρwgD(p+ p′),
ρ∗ = ρwρ,
where ω is the incident wave frequency and the velocity components are defined as
u∗i = (u∗, v∗, w∗).
6.1.1 Mass and momentum conservation equations for the
water columns
After scaling and ensemble averaging, the mass and momentum conservation equa-
tions for the incompressible flow in the water columns can respectively be written
as,
∇jUj = 0, (6.3)
∂Ui∂t
+ Uj∇jUi = − g
ω2D∇ip+
1
Reω
(∇2j Ui)−∇ju′iu
′j +
giω2D
, (6.4)
where the kinetic Reynolds number, Reω = ρwωD2/µ = 4α2; and α is the Wom-
ersley number. The derivation of equations (6.3) and (6.4) from the Navier-Stokes
equations are presented in Appendix A.1.1.
6.1.2 Simplifying the x-momentum equation of the water
columns
It is assumed that the flow in the water columns are axisymmetric (i.e., ∂()/∂φ =
0) and fully developed (i.e., ∂()/∂x = 0). Applying these assumptions in the x-
component of equation (6.4) (different components of the momentum equation for
100

the water zones are given in equations (A.14-A.16)) gives the x-momentum equation
as
∂U
∂t= − g
ω2D
∂p
∂x+
1
Reω
[1
r
∂
∂r
(r∂U
∂r
)]− 1
r
∂
∂r
(ru′v′
)+
gxω2D
. (6.5)
Following the definition of total shear stress presented in section 3.1.1, the total
shear stress in the water columns can be given as
τ =1
Reω
∂U
∂r− u′v′.
Introducing τ into equation (6.5) and averaging over the cross-sectional area gives
(detail are presented in section 3.1.1),
ξ = − g
ω2D
∂p
∂x− 4τw +
gxω2D
, (6.6)
where ξ is the normalised instantaneous displacement of the free surface inside the
device and τw is the dimensionless wall shear stress.
ξ0
ξ1lc0 h1
h2
h3
la0 la1ξ1
Figure 6.2. Dimensions of the OWC device.
101
6.1.3 Equation of motion for the water columns
Integration of equation (6.6) with respect to x along the first water column length
removes the spatial dependence of p and gives,
ξ0 = − 1
Klc0(pd − pc)− 4τw −
1
Klc0ξ0, (6.7)
where K = ω2/g, lc0 is the length of the first water column and ξ0 is the normalised
surface displacement of the column as shown in Figure 6.2. Figure 6.2 also shows
that the pressure at point d is pd, which is the air pressure in the air-compression
chamber and pc is the pressure at the OWC free-end.
Integration of equation (6.6) with respect to x along the second water column
length gives,
ξ1 = − 1
Klc1(ph − pe)− 4τw −
2
Klc1ξ1, (6.8)
where lc1 is the length of the second water column i.e. lc1 = h1 + h2 + h3, and ξ1 is
the normalised free surface displacement of the column as shown in Figure 6.2. In
equation (6.8), ph represents the air pressure in the plenum chamber (air chamber
below the turbine) and pe represents the air pressure in the air-compression chamber.
6.1.4 Modelling the pressure in the air-compression cham-
ber, pd and pe
The first water column in the OWC oscillates with the frequency of the incident
wave. Consequently, the air in the air-compression chamber oscillates approximately
at the same frequency. Since the wave frequency is quite low in the Ocean and the
sound speed is high in the air, the fluid properties in the air-compression cham-
ber barely change with space. It enables the assumption that the pressure in the
air-compression chamber is uniformly distributed, i.e. pd = pe. The spatial inde-
pendence of the pressure field allows treatment of the trapped air as an air-bubble.
102

Additionally, the heat generation and heat transfer due to the compression and ex-
pansion of the air can be considered negligible, hence it can be assumed that these
compression and expansion processes are adiabatic. Thus assuming air as an ideal
gas, the relationship between the pressure and volume can be given as
pgVγ = constant, (6.9)
where pd = pe = pg is the pressure in the air-compression chamber, V is the volume
of the air-compression chamber and γ is the adiabatic index. Equation (6.9) can be
expressed as
pgVγ = pg0V
γ0 ,
pg =pg0V
γ0
V γ, (6.10)
where pg0 and V0 are respectively the tuning pressure and volume of the air-compression
chamber, i.e. pressure and volume of the air-compression chamber before the oscil-
lation starts. The dimensionless volume of the air-compression chamber before the
oscillation starts (V0) and after the oscillation (V ) can respectively be given as
V0 =π
4
(la0
D
)and V =
π
4
(la0 −Dξ0 +Dξ1
D
).
Thus,
pg =pg0l
γa0
(la0 −Dξ0 +Dξ1)γ. (6.11)
It is assumed that the pressure fluctuation in the air-compression chamber is small,
which enables linearization of pg with respect to ξ0 and ξ1. Thus, taking the first-
order derivatives after the Taylor series expansion of pg(ξ0, ξ1) (details are presented
103

in Appendix A.2) gives,
pg(ξ0, ξ1) = pg0 +γDpg0la0
ξ0 −γDpg0la0
ξ1. (6.12)
6.1.5 Modelling the entrance pressure, pc
The pressure at the OWC free-end pc is composed of the pressure from the incident
wave that drives the water column pf , and the pressure induced by the radiation
wave pr. Thus the equation of motion for the first water column (equation (6.7))
can be written as
ξ0 + 4τw +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0(pf + pr). (6.13)
The entire flow field of the OWC can be split into a rotational and an irrotational
flow field. The driving pressure pf , and the pressure due to radiation wave pr are
derived from the irrotational flow. Additionally, pf is modelled considering that
there is no power take-off (PTO) system. Thus the only factor that would cause
the air in the air-compression chamber to compress or expand is the inertia of the
second water column. However while modelling pf , it is assumed that the inertia
of the second water column is small, thus it oscillates along with the trapped air
and the first water column. The pressure due to the radiation wave, pr, is modelled
considering that there is no incident wave. Thus, while modelling pr it is assumed
that the resistance from the first water column and the surrounding water to the
wave that radiates away from the device (due to the pressure fluctuation in the
plenum chamber) is small. Hence the water columns and the trapped air oscillate as a
solid body during radiation. For simplicity, both pf and pr are modelled considering
that the interaction between the waves and the complex geometry of the device is
the same as the interaction between the waves and a simple device presented in
Chapter 3.
Following the above assumptions, the derivation of pf and pr would be the same
104

as for a simple device (Chapter 3), which is provided in Appendix B. However in
the Appendix, pf is expressed as pd. Thus the absolute value of the amplitude of
the driving pressure (pf ) can be presented as
|Pf | =√
2hsN1/20 |q∗s |
πkD3sinh(kh)
∣∣∣∣∣ B
B2 + A2+ i
A
B2 + A2
∣∣∣∣∣ , (6.14)
where k = 2π/λ is the wave number, h is the water depth,
N0 = 0.5(1 + (sinh(2kh)/2kh)), q∗s is the induced volume flux due to scattered
waves, hs is the significant wave height and, A and B are the radiation susceptance
and radiation conductance respectively. Detailed definitions of these parameters are
given in Appendix B.2. The pressure due to the radiation wave (pr) can be expressed
as
pr = −Klc0(βrdξ0 + αrdξ0), (6.15)
where αrd is the added mass and βrd is the radiation damping. Thus the equation
of motion for the first water column after substituting equation (6.14) and (6.15) in
equation (6.13) can be given as
(1 + αrd)ξ0 + βrdξ0 + 4τw +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0pf . (6.16)
6.1.6 Including the damping due to the free-end of the OWC
Energy loss due to the free-end in reciprocating pipe flow has been measured and
presented in Chapter 5. The free-end loss was computed by subtracting the wall
shear stress loss inside the pipe from the total energy loss in the domain, i.e., ˙Ee =
˙Eew − ˙Ew. While calculating the wall shear stress loss inside the pipe ( ˙Ew), it was
assumed that the flow is fully developed throughout the pipe. In the present study,
the equation of motion for the first water column which is derived in equation (6.16)
also assumes that the flow is fully developed throughout the pipe. Now if the free-
end loss measured in Chapter 5 can be interpreted as a damping term and added
to equation (6.16), then all the possible losses that the first water column may
105

experience would be included into the equation of motion.
Since the velocity in Chapter 5 has been scaled by U0 and in the present Chapter
it is scaled by ωD, a conversion is required to incorporate the free-end loss ˙Ee into
equation (6.16). The conversion is done as follows,
˙E∗ep =(ρwπ
4D2lc0 + α∗rd
)ξ∗e0ξ
∗0 = ρwω
3D5
(πlc04D
)(1 + αrd)ξe0ξ0
= ˙Ee5 × ρwU30D
2, (6.17)
where ˙E∗ep is the free-end loss, ξe0 is the additional acceleration of the first water
column due to the free-end and ˙Ee5 is the free-end loss scaled by the variables of
Chapter 5. Hence ξe0 can be interpreted as a damping term as follows,
(1 + αrd)ξe0 =4D ˙Ee5ρwU
30D
2
πlc0ρwω3D5|ξ0|2 ξ =
4D ˙Ee5A30
πlc0|ξ0|2 ξ0 = βfeξ0; (6.18)
thus the damping coefficient due to the free-end is given by βfe =4D ˙Ee5A
30
πlc0|ξ0|2 . Intro-
ducing the free-end damping into equation (6.16) gives,
(1 + αrd)ξ0 + (βrd + βfe)ξ0 + 4τw +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0pf . (6.19)
6.1.7 Modelling the wall shear stress, τw in the reciprocating
flow system of the OWC
The presence of the boundary layers creates the rotational flow field in the OWC.
The shear stress term, τw in the equation of motion represents the boundary layers
and is derived in a similar manner to the way it was derived for a single water
column device in section 3.1.2.
As mentioned in section 3.1.2, the flow in the OWC is either turbulent or condi-
tionally turbulent, i.e. laminar during the acceleration phases and turbulent during
the deceleration phases. For the turbulent portion of the cycle, τw in section 3.1.2.1
106

was derived as
τw =1
4βtbξ, (6.20)
where βtb = 0.15816 Re−1/4ω |ξ|3/4. Substituting equation (6.20) into (6.19) gives the
equation of motion for the first water column including turbulent wall shear stress
damping as
(1 + αrd) ξ0 + (βrd + βfe + βtb) ξ0 +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0pf ; (6.21)
and substituting equation (6.20) into (6.8) gives the equation of motion for the
second water column including turbulent wall shear stress damping as
ξ1 + βtbξ1 +2
Klc1ξ1 +
1
Klc1ph =
1
Klc1pg, (6.22)
For the laminar portion of the cycle, τw in section 3.1.2.1 was derived as
τw =1
4(αlmξ + βlmξ), (6.23)
where αlm = 32Fωsin θ1, βlm = 32Fωcos θ1; and θ1 is the phase difference and the
factor Fω is given by
Fω =
√C2
1 + C22
16√
(α− 2C21)2 + 4C2
2
(6.24)
where C1 and C2 are constants and α =√
Reω/2. Substituting equation (6.23) into
equation (6.19) gives the governing equation of motion for the first water column
including laminar wall shear stress damping as
(1 + αrd + αlm) ξ0 + (βrd + βfe + βlm) ξ0 +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0pf ; (6.25)
and substituting equation (6.23) into (6.8) gives the equation of motion for the
second water column including laminar wall shear stress damping as
(1 + αlm)ξ1 + βlmξ1 +2
Klc1ξ1 +
1
Klc1ph =
1
Klc1pg. (6.26)
107

6.1.8 Modelling the Power-Take-Off (PTO)
The PTO of the present OWC device is modelled in exactly the same manner as
the PTO of the single device was modelled in section 3.1.3. Thus the dimensionless
equation for the air pressure in the plenum chamber can be given as
dphdt
+ 4c2Ktd0
πla1Nt
ph = KD2ρac2
la1
ξ1, (6.27)
where c is the dimensionless sound speed, Nt is the dimensionless turbine rotational
speed, d0 is the turbine rotor diameter, la1 is the length of the plenum chamber and
Kt is an empirical turbine coefficient which is fixed for a given turbine geometry.
Furthermore, as mentioned earlier, K = ω2/g and D is the OWC diameter.
6.1.9 Summary of the governing equations
For convenience, the governing equations derived for the OWC are summarised
below.
The equations of motion for the first and second water columns in the turbulent
portion of the cycle are respectively,
(1 + αrd) ξ0 + (βrd + βfe + βtb) ξ0 +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0pf , (6.28)
and
ξ1 + βtbξ1 +2
Klc1ξ1 +
1
Klc1ph =
1
Klc1pg. (6.29)
The equations of motion for the first and second water columns in the laminar
portion of the cycle are respectively,
(1 + αrd + αlm) ξ0 + (βrd + βfe + βlm) ξ0 +1
Klc0ξ0 +
1
Klc0pg =
1
Klc0pf , (6.30)
108

and
(1 + αlm)ξ1 + βlmξ1 +2
Klc1ξ1 +
1
Klc1ph =
1
Klc1pg. (6.31)
The air pressure in the air-compression chamber is given by
pg = pg0 +γDpg0la0
ξ0 −γDpg0la0
ξ1. (6.32)
The equation for the PTO system is
dphdt
+ 4c2Ktd0
πla1Nt
ph = KD2ρac2
la1
ξ1. (6.33)
6.2 Results
The dimensionless instantaneous power output is calculated as
P =p∗a
ρwgD× Q∗
ωD3=π
4paξ, (6.34)
and the dimensionless average power as
Pavg =1
T
∫ T
0
P (t)dt, (6.35)
where the wave period, T = 2π/ω.
The value of Pavg is computed, first for the radiation damping, second for the
radiation and turbulent damping, and finally for the radiation, turbulent and free-
end damping by solving equations (6.28), (6.29), (6.32) and (6.33). The explicit
fourth order Runge-Kutta algorithm is used to solve them numerically.
The equations are solved for the first water column length to water depth ratio
lc0/h = 0.4, second water column to water depth ratio lc1/h = 1.2, diameter to
water depth ratio D/h = 0.1, the air-compression chamber length to water depth
ratio la0/h = 0.3, the plenum chamber length to water depth ratio la1/h = 0.6,
109

0
0.1
0.2
0.3
0.4
0.5
0.6
1 1.5 2 2.5 3
Kh
Pavg
Figure 6.3. Average dimensionless power against dimensionless parameter Kh fordifferent damping : —, radiation (βrd); —, radiation and turbulent (βrd + βtb) and—, radiation, turbulent and free-end (βrd + βtb + βfe).
the significant wave height to water depth ratio hs/h = 0.2, turbine parameter
Ktd0/(la1N∗t ) = 0.00064 s, and the specific heat ratio for air γ = 1.4. During
the computation, it is considered that the pressure in the air-compression chamber
pg0 = 1. As it has been seen from Chapter 5, Figure 5.12, that the energy dissipation
rates due to the free-end (i.e. ˙Ee values) for Reω = 400 do not vary significantly
from the ˙Ee values for Reω = 3.57× 104, ˙Ee values for Reω = 400 has been used to
compute the free-end damping coefficient βfe.
Figure 6.3 shows the power output from the OWC, Pavg, as a function of Kh
for different damping. Two different modes (as mentioned in the beginning of this
Chapter), the pendulum mode and the spring-like mode are apparent from the
Figure. It can be seen that the resonance for the pendulum mode occurs at Kh =
1.723, and for the spring-like mode the resonance occurs at Kh = 2.576. It also
shows that the inclusion of free-end damping reduces the power output significantly.
110

6.3 Summary
Two equations of motion for the two water columns in a tuned OWC have been
derived from the Navier-Stokes equations. The pressures at the OWC free-end (due
to the incident and radiation waves) and in the plenum chamber (due to the PTO
system) have been modelled in a similar manner as they were modelled for the
OWC in Chapter 3. Additionally, the pressure due to the adiabatic compression
and expansion of air in the air-compression chamber has been linearized assuming
that the pressure fluctuation in the chamber is small. The free-end damping has
been incorporated into the equations of motion from Chapter 5. The governing
equations have been solved for different damping models to calculate the power
extraction by the device. As expected, two resonances were noticed for the two
modes of oscillation; one for the pendulum mode of oscillation and the other one
for the spring-like oscillation. It has been found that the inclusion of the free-end
damping reduces the power output significantly.
Since the present Chapter was focused on illustrating how the work of the pre-
ceding Chapters might be applied to future technology developments, a detailed
study on the tuning mechanism was left as a future work. Thus, a future study is
suggested to investigate the pressure and volume in the air-compression chamber to
tune the device with the incident wave frequency.
111

Chapter 7
Conclusion
A mass-spring-damping model of a single-column fixed-type near-shore OWC has
been derived from the Navier-Stokes equations. Damping due to the wall shear
stress during the laminar and turbulent portions of the cycle has been incorporated
respectively from [32] and [9]. Damping due to the radiation wave has been calcu-
lated from [1] and incorporated into the current model through a conversion process
presented in [30]. While modelling the PTO system, it has been assumed that the air
in the air chamber compresses and expands isentropically. The flow inside the OWC
has been assumed fully developed throughout the device, neglecting the free-end
effect.
It has been found that wider devices encounter most of their damping from
radiation waves. However, as the device gets narrower, the wall shear stress damping
becomes significant at the resonance. Thus for better efficiency, the wall shear stress
damping needs to be considered while designing a resonant OWC. Additionally, it
has been shown as expected, that the overall power extraction by the device increases
with the increase of the significant wave height. Furthermore, it has been shown in
Figure 3.11 that with the increase of significant wave height, the device can extract
significant amount of power over wider range of wave frequency.
As a requirement of evaluating whether the flow in an OWC is fully developed
throughout the device, an extensive Direct Numerical Simulation (DNS) study has
been conducted to investigate the developing length in a reciprocating pipe flow.
112

The centreline velocity, uc and the radial gradient of the x-direction velocity at the
wall, ∂u/∂r|w have been used to measure the developing length.
It has been found that the developing length follows a sinusoidal pattern over
the cycle, making a 90◦ phase difference with the centreline velocity uc. It has
been shown that if the maximum developing length (le)max and the cycle-average
developing length (le)mean are scaled by the Stokes-layer thickness δ and plotted
against Reδ, the following linear correlations are possible.
For the maximum entrance length the correlation is
(le)max/δ = 1.37Reδ + 5.3,
valid for the range of modified Womersley number α′ from 100 to 300 for the am-
plitude A0 such that 1 ≤ A0 ≤ 9 and from 300 to 400 for 1 ≤ A0 ≤ 7.
For the cycle-average entrance length the correlation is
(le)mean/δ = 0.82Reδ + 2.16,
valid for the range of α′ from 150 to 300 for 1 ≤ A0 ≤ 9 and from 300 to 400 for
1 ≤ A0 ≤ 7.
Hence, it has become clear that the developing length at the OWC free-end
is significant. Thus, an approach has been taken to measure the free-end loss in
reciprocating pipe flow which includes the energy loss in the developing region. A
dimensionless energy equation has been derived for a control volume to evaluate
the dissipation term, which then has been used to calculate the losses. The rate
of energy dissipation in different areas of the flow domain have been measured. It
has been found that the maximum proportion of loss is due to the internal shear
stress when the pipe is long. However, as the pipe gets shorter, the domination
of the inside-pipe shear stress loss decreases and the contribution of the free-end
loss to the overall loss increases. It has been found that if the pipe is 5 diameters
long, for Reδ = 2√
2A0α > 80, the free-end loss is more than the inside-pipe shear
113

stress loss. Additionally, visualisation of the vortices and the energy dissipation
field showed that the vortices get weaker as they propagate away from the free-end,
and within few diameters downstream energy dissipation caused by those vortices
becomes insignificant. Furthermore, a comparison between the energy loss measured
in [12] and the results from the present DNS study showed that the variation of the
energy dissipation at α′ = 400 and 3.57 × 104 is very small for A0 > 0.8. Thus, to
estimate the free-end loss in the OWCs where A0 > 0.8, results for α′ = 400 can be
used.
Finally, the governing equations for a tuned OWC have been derived, incorpo-
rating the free-end damping along with the wall shear stress and radiation damping.
Since this is intended to be only an illustration of an application of the preceding
results, a detailed study on the tuning mechanism was beyond the scope of present
study. Therefore, a future study is suggested to investigate the pressure and volume
in the air-compression chamber in order to tune the device with the incident wave
frequency. However, it has been found that the inclusion of the free-end damping
reduces the power output significantly.
114

Appendices
115

Appendix A
Dimensionless governing equations
for OWC
A.1 Reynolds-Averaged Navier-Stokes (RANS) equa-
tions
The differential form of the mass conservation or the continuity equation is
∂ρ∗
∂t∗+∇∗j(ρ∗u∗j) = 0 (A.1)
and the momentum conservation equation is
∂(ρ∗u∗i )
∂t∗+∇∗j(ρ∗u∗iu∗j) = −∇∗i p∗ +∇∗jτ ∗ij + ρ∗gi, (A.2)
where τ ∗ij is the viscous stress tensor and “∗ ” denotes dimensional variables. For an
isotropic fluid, the viscous stress,
τ ∗ij = λ¯e∗ij + 2µe∗ij,
116

where
e∗ij =1
2
(∂u∗i∂x∗j
+∂u∗j∂x∗i− 2
3
∂u∗k∂x∗k
δij
)=
1
2
(∇∗ju∗i +∇∗iu∗j −
2
3∇∗ku∗kδij
)
and
¯e∗ =1
3
∂u∗k∂x∗k
δij =1
3∇∗ku∗kδij.
Here µ(T ) is the dynamic viscosity, λ(T ) is the second viscosity which is usually
neglected, and δij is the Kronecker delta function. Thus τ ∗ij can be written as,
τ ∗ij = µ
(∂u∗i∂x∗j
+∂u∗j∂x∗i− 2
3
∂u∗k∂x∗k
δij
)= µ
(∇∗ju∗i +∇∗iu∗j −
2
3∇∗ku∗kδij
)(A.3)
The lengths in the cylindrical co-ordinate system, x∗i = (x∗, r∗, φ) are scaled as
follows,
x∗i = Dxi,
where “*” represents dimensional quantities and D is the diameter of the device.
Time, velocity and pressure are scaled with the bar representing the mean flow,
while primes represent fluctuating variables as follows,
t∗ = ω−1t,
u∗i = ωD(Ui + u′i
), (A.4)
p∗ = ρwgD(p+ p′),
ρ∗ = ρwρ.
where ω is the incident wave frequency and the velocity components are defined as
u∗i = (u∗, v∗, w∗). Thsu the continuity equation can be written as
∂ρ
∂t+∇j[ρ(Uj + u′j)] = 0. (A.5)
Ensemble average of (A.5) will eliminate the term containing single fluctuating quan-
117

tity i.e., u′j. Thus after the ensemble average, equation (A.5) can be given as,
∂ρ
∂t+∇j(ρUj) = 0. (A.6)
In cylindrical co-ordinate system,
∇j =∂
∂x~ex +
∂
∂r~er +
1
r
∂
∂φ~eφ.
Applying (A.3) to (A.2) gives the momentum equation as
∂(ρ∗u∗i )
∂t∗+∇∗j(ρ∗u∗iu∗j) = −∇∗i p∗ +∇∗j{µ(∇∗ju∗i +∇∗iu∗j −
2
3∇∗ku∗kδij)}+ ρ∗gi. (A.7)
There is no change of dynamic viscosity µ in the OWC, thus
∂(ρ∗u∗i )
∂t∗︸ ︷︷ ︸(1)
+∇∗j(ρ∗u∗iu∗j)︸ ︷︷ ︸(2)
= −∇∗i p∗︸ ︷︷ ︸(3)
+µ∇∗j(∇∗ju∗i +∇∗iu∗j −2
3∇∗ku∗kδij)︸ ︷︷ ︸
(4)
+ ρ∗gi︸︷︷︸(5)
. (A.8)
Introducing the scaling from equation (A.4) to the term (1) of (A.8) is
∂(ρ∗u∗i )
∂t∗= ρwDω
2 ∂
∂t(ρUi + ρu′i).
After ensemble averaging,
∂(ρ∗u∗i )
∂t∗= ρwDω
2 ∂
∂t(ρUi),
Ensemble averaged value of term (2) after scaling is
∇∗j(ρ∗u∗iu∗j) = ρwDω2 ∇j[ρUiUj + ρ(u′iu
′j)].
Ensemble averaged value of term (3) after scaling is
∇∗i p∗ = ρwg∇iP .
118

Ensemble averaged value of term (4) after scaling is
µ∇∗j(∇∗ju∗i +∇∗iu∗j −2
3∇∗ku∗kδij) =
ωµ
D∇j(∇jUi +∇iUj −
2
3∇kUkδij).
Ensemble averaged value of term (5) after scaling is
ρ∗gi = ρwρgi.
Thus, the ensemble average of equation (A.8) after scaling can be written as
∂
∂t(ρUi) + ∇j
[ρUiUj + ρ(u′iu
′j)]
= − gi
ω2D∇iP
+1
Reω∇j
(∇jUi +∇iUj −
2
3∇kUkδij
)+
ρgiω2D
(A.9)
where the kinetic Reynolds number Reω = 4α2; α =D
2
√ρwω
µis the Womersley
number.
A.1.1 RANS equations for the water column in OWC
In the water column, the normalised density ρ = 1. Thus, the continuity equation
(A.6) in the water column is
∇jUj = 0, (A.10)
where Uj = (U , V , W ). Therefore,
∂U
∂x+
1
r
∂(rV )
∂r+
1
r
∂W
∂φ= 0. (A.11)
The momentum equation (A.9) becomes,
∂Ui∂t
+ ∇j
[UiUj + u′iu
′j
]= − gi
ω2D∇iP
+1
Reω∇j
(∇jUi +∇iUj −
2
3∇kUkδij
)+
giω2D
,
119

∂Ui∂t
+[Uj∇jUi + Ui∇jUj +∇j(u′iu
′j)]
= − gi
ω2D∇iP
+1
Reω
(∇2j Ui +∇i∇jUj −
2
3∇j∇kUkδij
)+
giω2D
. (A.12)
Applying (A.10) to (A.12) gives,
∂Ui∂t
+ Uj∇jUi = − gi
ω2D∇iP +
1
Reω∇2j Ui −∇j(u′iu
′j) +
giω2D
. (A.13)
The x-component of equation (A.13) is
∂U
∂t+
[U∂U
∂x+ V
∂U
∂r+W
r
∂U
∂φ
]= − gx
ω2D
∂P
∂x
+1
Reω
[∂2U
∂x2+
1
r
∂
∂r
(r∂U
∂r
)+
1
r2
∂2U
∂φ2
]
−
[∂u′2
∂x+
1
r
∂
∂r
(ru′v′
)+
1
r
∂(u′w′)
∂φ
]+
gxω2D
. (A.14)
The r-component of equation (A.13) is
∂V
∂t+
[U∂V
∂x+ V
∂V
∂r+W
r
∂V
∂φ− W 2
r
]= − gr
ω2D
∂P
∂r
+1
Reω
[∂2V
∂x2+
1
r
∂
∂r
(r∂V
∂r
)+
1
r2
∂2V
∂φ2− 2
r2
∂W
∂φ− V
r2
]
−
[∂(u′v′)
∂x+
1
r
∂(rv′2)
∂r+
1
r
∂(v′w′)
∂φ− w′2
r
]+
grω2D
. (A.15)
120

The φ-component of equation (A.13) is
∂W
∂t+
[U∂W
∂x+ V
∂W
∂r+W
r
∂W
∂φ+V W
r
]= − gφ
ω2D
1
r
∂P
∂φ
+1
Reω
[∂2W
∂x2+
1
r
∂
∂r
(r∂W
∂r
)+
1
r2
∂2W
∂φ2+
2
r2
∂V
∂φ− W
r2
]
−
[∂(u′w′)
∂x+
1
r
∂(rv′w′)
∂r+
1
r
∂w′2
∂φ+v′w′
r
]+
gφω2D
. (A.16)
A.1.2 RANS equations for the air-compression chamber
The air in the air-compression chamber is considered as a compressible gas. Thus,
substituting ρ in equation (A.6) by the air density ρa gives the continuity equation
for air-compression chamber as
∂ρa∂t
+∇j(ρaUj) = 0, (A.17)
∂ρa∂t
+
[∂
∂x(ρaU) +
1
r
∂
∂r(rρaV ) +
1
r
∂
∂φ(ρaW )
]= 0. (A.18)
The momentum equation for the air-compression chamber can be derived from equa-
tion (A.9) as
∂
∂t
(ρaUi
)+ ∇j
[ρaUiUj + ρa(u′iu
′j)]
= − gi
ω2D∇iP
+1
Reω∇j
(∇jUi +∇iUj −
2
3∇kUkδij
)+ρagiω2D
,
Ui∂ρa∂t
+ ρa∂Ui∂t
+ Ui∇j(ρaUj) + (ρaUj)∇jUi +∇j[ρa(u′iu′j)] = − gi
ω2D∇iP
+1
Reω∇j
(∇jUi +∇iUj −
2
3∇kUkδij
)+ρagiω2D
,
121

Ui
[∂ρa∂t
+∇j(ρaUj)
]+ρa
∂Ui∂t
+ (ρaUj)∇jUi +∇j[ρa(u′iu′j)]
= − gi
ω2D∇iP +
1
Reω∇j
(∇jUi +∇iUj −
2
3∇kUkδij
)+ρagiω2D
. (A.19)
Applying (A.17) to (A.19) gives,
ρa∂Ui∂t
+ ρaUj∇jUi +∇j[ρa(u′iu′j)]
= − gi
ω2D∇iP +
1
Reω∇j
(∇jUi +∇iUj −
2
3∇kUkδij
)+ρagiω2D
. (A.20)
The x-component of equation (A.20) is
ρa∂U
∂t+ ρa
[U∂U
∂x+ V
∂U
∂r+W
r
∂U
∂φ
]
= − gxω2D
∂P
∂x+
1
Reω
[∂τxx∂x
+1
r
∂(rτxr)
∂r+
1
r
∂τxφ∂φ
]
−ρa
[∂u′2
∂x+
1
r
∂
∂r
(ru′v′
)+
1
r
∂(u′w′)
∂φ
]+ρagxω2D
. (A.21)
The r-component of equation (A.20) is
ρa∂V
∂t+ ρa
[U∂V
∂x+ V
∂V
∂r+W
r
∂V
∂φ− W 2
r
]
= − grω2D
∂P
∂r+
1
Reω
[∂τxr∂x
+1
r
∂(rτrr)
∂r+
1
r
∂τrφ∂φ− τφφ
r
]
−ρa
[∂(u′v′)
∂x+
1
r
∂(rv′2)
∂r+
1
r
∂(v′w′)
∂φ− w′2
r
]+ρagrω2D
. (A.22)
122

The φ-component of (A.20) is
ρa∂W
∂t+ ρa
[U∂W
∂x+ V
∂W
∂r+W
r
∂W
∂φ+V W
r
]
= − gφω2D
1
r
∂P
∂φ+
1
Reω
[∂τxφ∂x
+1
r
∂(rτrφ)
∂r+
1
r
∂τφφ∂φ
+τrφr
]
−ρa
[∂(u′w′)
∂x+
1
r
∂(rv′w′)
∂r+
1
r
∂w′2
∂φ+v′w′
r
]+ρagφω2D
. (A.23)
123

A.1.3 Dimensionless shear stress tensor, τij in cylindrical
coordinate system
Different components of the dimensionless shear stress tensor in cylindrical coordi-
nate system can be given as
τxr =
[∂V
∂x+∂U
∂r
]
τxφ =
[∂W
∂x+
1
r
∂U
∂φ
]
τrφ =
[∂W
∂r+
1
r
∂V
∂φ− W
r
]
τxx = 2∂U
∂x− 2
3
[∂U
∂x+
1
r
∂(rV )
∂r+
1
r
∂W
∂φ
]
=4
3
∂U
∂x− 2
3
1
r
∂(rV )
∂r− 2
3
1
r
∂W
∂φ
τrr = 2∂V
∂r− 2
3
[∂U
∂x+V
r+∂V
∂r+
1
r
∂W
∂φ
]
=4
3
∂V
∂r− 2
3
V
r− 2
3
∂U
∂x− 2
3
1
r
∂W
∂φ
τφφ = 2
[1
r
∂W
∂φ+V
r
]− 2
3
[∂U
∂x+V
r+∂V
∂r+
1
r
∂W
∂φ
]
=4
3
1
r
∂W
∂φ+
4
3
V
r− 2
3
∂U
∂x− 2
3
∂V
∂r.
(A.24)
124

A.2 Linearizing the pressure in the air-compression
chamber, pg
Applying multi-variable taylor series expantion to pg with respect to ξ0 and ξ1 and
considering the first order derivatives only, gives
pg(ξ0, ξ1) = pg|0,0 + ξ0dpgdξ0
|0,0 + ξ1dpgdξ1
|0,0. (A.25)
Here
pg|ξ0,ξ1 =pg0l
γa0
(la0 −Dξ0 +Dξ1)γ,
pg|0,0 = pg0.
dpgdξ0
|ξ0,ξ1 = γDpg0l
γa0
(la0 −Dξ0 +Dξ1)γ+1 ,
dpgdξ0
|0,0 =γDpg0la0
.
dpgdξ1
|ξ0,ξ1 = −γD pg0lγa0
(la0 −Dξ0 +Dξ1)γ+1 ,
dpgdξ1
|0,0 = −γDpg0la0
.
Thus equation (A.25) can be written as
pg(ξ0, ξ1) = pg0 +γDpg0la0
ξ0 −γDpg0la0
ξ1. (A.26)
125

Appendix B
Modelling the pressure from the
incident and radiative waves, pd(t)
and pr(t)
The driving pressure pd(t) is generally modelled by solving the scattering of the in-
cident wave, in the absence of the pressure fluctuation in the air-chamber (i.e. when
pa(t) = 0). The radiation induced pressure pr(t) is modelled by solving for the radi-
ation wave, generated by the pressure oscillation in the air-chamber in the absence
of the incident wave. In the present work, we incorporated from [1] the derivation
of the internal volume fluxes (q∗s and q∗r), induced in the scattering and radiation
problems in a cylindrical OWC. In [1], hydrodynamic characteristics were derived by
considering an oscillating pressure distribution over the internal free surface. How-
ever, the aim here is to come up with a mechanical mass-spring-damping equivalent
model of the OWC (including shear stress damping). Such models are commonly
used to describe the oscillation of the rigid bodies in heave [78]. If the wavelengths
are not too short, it is possible to transform the hydrodynamic parameters of the
pressure-distribution model (i.e. [1]) to the rigid-body model (mass-spring-damping
model), as shown in [30]. A similar approach is taken to derive the pd(t) and pr(t)
of the current model from the induced internal volume fluxes q∗s(t) and q∗r(t) of [1].
126

B.1 Computing q∗s and q∗r from [1]
The time-dependent volume flux across an internal free surface of an OWC is defined
as, Q∗(t∗) = Re { q∗e−iωt∗}. The flux amplitude is
q∗ = q∗s +1
ρwg
dp∗adt∗
q∗r , (B.1)
where q∗s and q∗r are the induced volume fluxes in the scattering and radiation prob-
lems, respectively.
Under the assumptions of linear water-wave theory, solving for the velocity po-
tentials in different regions of the flow domain, gives
q∗s =4πikRhJ1(kR)S21
γH1(kR) + 2iS22
. (B.2)
Here the wavenumber, k = 2π/λ, γ = πkRkhJ1(kR) and R is the radius of the
device, J1 and H1 are the Bessel and Hankel functions of the first kind, respectively
and S12 and S22 are the elements of a 2×2 real symmetric matrix, S = {Sij}, which
expresses the hydrodynamic characteristics of the device. Following [25], the volume
flux due to the radiation is decomposed as
1
ρwg
dp∗adt∗
q∗r = −B∗p∗a −A∗
ω
dp∗adt∗
, (B.3)
where A∗ and B∗ are real, and following [79], these are called the radiation suscep-
tance and radiation conductance, respectively. Solving the radiation potential in
different regions of the flow domain gives the volume flux due to the radiation as,
q∗r =2πR(γH1(kR)S11 + 2i∆)
K[γH1(kR) + 2iS22], (B.4)
where ∆ = S11S22 − S12S21.
A Galerkin method is used to determine the matrix Sij, and hence q∗s and q∗r are
computed from equations (B.2) and (B.4).
127

B.2 Deriving the driving pressure, pd(t) and the
radiation induced pressure, pr(t) from q∗s and
q∗r
Following [30], q∗s and q∗r of the pressure-distribution model are transformed to the
pd(t) and pr(t) of the current mass-spring-damping model. The q∗s and q∗r in section
(B.1) are derived based on potential flow theory. Therefore, to incorporate them into
our model, we need to have an equation of motion that separates the irrotational
wave physics outside the OWC and in the far field, which can be represented by
potential flow, from the vorticity-dominated physics of the boundary layers inside
the OWC. To make it convenient, we split the internal flow field into the irrotational
and the rotational flow field. In this section, we first derive the pd(t) and pr(t) from
q∗s and q∗r for the irrotational flow. Then the shear stress term is added to the
equation of motion as a representative of the rotational flow inside the device. A
similar approach was presented in [28] while studying a wave-driven seawater pump.
Thus for the potential flow, equation (3.10) can be written as
ξ +1
Klcξ +
1
Klcpa =
1
Klc(pd + pr). (B.5)
The induced force due to the radiation wave can be expressed as
1
Klcpr = −Zrξ, (B.6)
where Zr is called the radiation impedance [80]. The oscillation in the OWC is
assumed to be time-harmonic with the incident-wave frequency ω; thus the time-
dependent displacement and pressures can be expressed by,
{ξ, pd, pr, pa}(t) = Re({D, Pd, Pr, Pa
}e−it), (B.7)
128

where D, Pd, Pr and Pa are the amplitudes. Equation (B.5) can be rewritten as
1
Klcpa =
1
Klcpd −
(Zr + i
1
Klc− i)ξ. (B.8)
The net volume flux across the internal free surface, Q∗ = ωDSξ, where S is the
internal free surface area. Thus from equation (B.8),
Q∗
ωDS=
1
Klc
(pd − pa)(Zr + i
1
Klc− i) . (B.9)
Substituting (B.3) into (B.1) and scaling the resultant by equation (A.4) gives,
q∗
ωDS=
q∗sωDS
− Y Pa, (B.10)
where Y =ρwg
ωS(B∗ − iA∗) = B − iA. Equation (B.9) then becomes
q∗sωDS
− Y Pa =1
Klc
(Pd − Pa)(Zr + i
1
Klc− i) . (B.11)
By definition, q∗s is the volume flux across the internal free surface when Pa = 0,
thus from equation (B.11),
q∗sωDS
=1
Klc
Pd(Zr + i
1
Klc− i) ; (B.12)
therefore,
Y =1
Klc
1(Zr + i
1
Klc− i) . (B.13)
Rearrangement of equation (B.13), and the substitution of Y by A and B gives
Zr =1
Klc
B
B2 + A2+ i
(1
Klc
A
B2 + A2− 1
Klc+ 1
). (B.14)
129

Following [1], scaling the induced volume flux due to the scattering potential |q∗|, by
the volume flux across the internal free surface due to a solid mass of fluid oscillating
with the incident wave frequency ω and amplitude a gives,
|q∗s |ωaS
=4N
1/20 |q∗s |
πkD2sinh(kh), (B.15)
where N0 =1
2
(1 +
sinh(2kh)
2kh
). As shown in [81], the wave amplitude a of a
sinusoidal wave can linearly be related to the significant wave height as
a =hs
2√
2. (B.16)
Thus, substituting equations (B.14),(B.15) and (B.16) into (B.12) gives the absolute
value of the driving pressure amplitude
|Pd| =√
2hsN1/20 |q∗s |
πkD3sinh(kh)
∣∣∣∣∣ B
B2 + A2+ i
A
B2 + A2
∣∣∣∣∣ . (B.17)
Following [79], by analogy with electric-circuit theory, the radiation impedance Zr
is composed of the radiation resistance and radiation reactance. However, in hy-
drodynamics they are known as the radiation damping βrd(ω) and the added mass
αrd(ω), respectively, hence
Zr = βrd − iαrd. (B.18)
From equations (B.14) and (B.18), the dimensionless added mass is
αrd =1
Klc− 1
Klc
A
B2 + A2− 1, (B.19)
and radiation damping is
βrd =1
Klc
B
B2 + A2. (B.20)
130

Substituting equation (B.18) into (B.6) gives
1
Klcpr = −(βrd − iαrd)ξ = −βrdξ − αrdξ. (B.21)
131

Appendix C
Direct Numerical Simulation
(DNS) code description
The DNS code solves the Navier-Stokes equations for incompressible flow,
∇ · u = 0, (C.1)
∂u
∂t= −(u · ∇)u−∇P +
1
Re(∇2u). (C.2)
Equation (C.2) is solved by a 3-way time-splitting method. In this method each of
the three terms on the right side of equation (C.2) is integrated over one time-step
separately, using the result from the previous sub-step as the initial condition, i.e.,
u∗ − un = −∫ t+∆t
t
(u · ∇)u dt, (C.3)
u∗∗ − u∗ = −∫ t+∆t
t
∇P dt, (C.4)
un+1 − u∗∗ =1
Re
∫ t+∆t
t
∇2u dt, (C.5)
where n represents the current time-step, and u∗ and u∗∗ are intermediate velocity
fields at the end of the advection and pressure sub-steps, respectively.
Equation (C.3) is solved for u∗ using Adams-Bashforth scheme, which is a third-
order explicit method. The pressure P is solved first by taking the divergence of
132

equation (C.4), which gives
∇ · u∗∗ −∇ · u∗
∆t= −∇2P. (C.6)
Then continuity is enforced at the end of the step, i.e., ∇ · u∗∗ = 0; thus equation
(C.6) becomes,
∇2P =∇ · u∗
∆t, (C.7)
which is a Poisson equation. Now equation (C.7) is solved to calculate the pressure
P , which is then used in equation (C.4) to get u∗∗. This u∗∗ is then used in equation
(C.5) to calculate un+1 using a Crank-Nicolson scheme, which is a second-order
implicit method.
The spatial discretisation is done using a nodal-based spectral-element method.
This method is a member of the broader class of methods of weighted residuals. It
solves the equations of motion (C.5), (C.6) and (C.7) in the weak form or variational
formulation. The weak form requires the solution to be represented by a series of
functions, here the Lagrange polynomials are used. The weak form also requires
the evaluation of a series of integrals over the spatial domain which is efficiently
done by using internal points on each element that coincide with Gauss-Lobatto-
Legengre quadrature points. A thorough description of the spectral element method,
as applied to the Navier-Stokes equations, can be found in [82].
In the spectral-element method, the mesh can be refined by increasing the num-
ber of elements which is known as h-refinement and by increasing the number of
internal points (i.e. increasing the order of Lagrange polynomials) which is known
as p-refinement. In this thesis, a mesh using 5136 quadrilateral elements was used
with 8th order polynomials resulting in 64 internal points on each element.
133

References
[1] David V Evans and Richard Porter. Efficient calculation of hydrodynamic
properties of owc-type devices. Journal of Offshore Mechanics and Arctic En-
gineering, 119(4):210–218, 1997.
[2] TV Heath. A review of oscillating water columns. Philosophical Transac-
tions of the Royal Society A: Mathematical, Physical and Engineering Sciences,
370(1959):235–245, 2012.
[3] Ramiro Godoy-Diana and Steven PR Czitrom. On the tuning of a wave-energy
driven oscillating-water-column seawater pump to polychromatic waves. Ocean
Engineering, 34(17):2374–2384, 2007.
[4] Arturo Olvera, Esteban Prado, and Steven Czitrom. Parametric resonance in
an oscillating water column. Journal of Engineering Mathematics, 57(1):1–21,
2007.
[5] Paolo Boccotti. Comparison between a u-owc and a conventional owc. Ocean
Engineering, 34(5):799–805, 2007.
[6] SI Sergeev. Fluid oscillations in pipes at moderate reynolds numbers. Fluid
dynamics, 1(1):121–122, 1966.
[7] Mikio Hino, Masaki Sawamoto, and Shuji Takasu. Experiments on transition to
turbulence in an oscillatory pipe flow. Journal of Fluid Mechanics, 75(02):193–
207, 1976.
134
[8] David M Eckmann and James B Grotberg. Experiments on transition to turbu-
lence in oscillatory pipe flow. Journal of Fluid Mechanics, 222:329–350, 1991.
[9] R Akhavan, RD Kamm, and AH Shapiro. An investigation of transition to
turbulence in bounded oscillatory stokes flows part 1. experiments. Journal of
Fluid Mechanics, 225(1):395–422, 1991.
[10] JH Gerrard and MD Hughes. The flow due to an oscillating piston in a cylindri-
cal tube: a comparison between experiment and a simple entrance flow theory.
Journal of Fluid Mechanics, 50(01):97–106, 1971.
[11] GF Knott and MR Mackley. On eddy motions near plates and ducts, induced by
water waves and periodic flows. Philosophical Transactions of the Royal Society
of London. Series A, Mathematical and Physical Sciences, pages 599–623, 1980.
[12] GF Knott and JO Flower. Measurement of energy losses in oscillatory flow
through a pipe exit. Applied Ocean Research, 2(4):155–164, 1980.
[13] Ibrahim Dincer. Renewable energy and sustainable development: a crucial
review. Renewable and Sustainable Energy Reviews, 4(2):157–175, 2000.
[14] Antonio F de O Falcao. Wave energy utilization: A review of the technologies.
Renewable and sustainable energy reviews, 14(3):899–918, 2010.
[15] Alain Clement, Pat McCullen, Antonio Falcao, Antonio Fiorentino, Fred Gard-
ner, Karin Hammarlund, George Lemonis, Tony Lewis, Kim Nielsen, Simona
Petroncini, et al. Wave energy in europe: current status and perspectives.
Renewable and Sustainable Energy Reviews, 6(5):405–431, 2002.
[16] Sam Behrens, Jennifer Hayward, Mark Hemer, and Peter Osman. Assessing
the wave energy converter potential for australian coastal regions. Renewable
Energy, 43:210–217, 2012.
[17] NN Panicker. Power resource potential of ocean surface waves. In Proceedings
135

of the wave and salinity gradient workshop, Newark, Delaware, USA, pages
J1–J48, 1976.
[18] Stephen Barstow, Gunnar Mrk, Denis Mollison, and Joo Cruz. The wave en-
ergy resource. In Joao Cruz, editor, Ocean Wave Energy, Green Energy and
Technology(Virtual Series), pages 93–132. Springer Berlin Heidelberg, 2008.
[19] Michael E McCormick. Ocean wave energy conversion. New York, Wiley-
Interscience, 1981. 255 p., 1, 1981.
[20] Voith group. Energy from active breakwaters. http://www.voith.com, 2006.
[Online; last accessed 16-November-2016].
[21] Nancy Stauffer. Catch the wave. http://news.mit.edu, 2008. [Online; last
accessed 16-November-2016].
[22] Oceanlinx. Oceanlinx built and deployed an instrumented 1/3rd scale test unit
of its Mk2 WEC in late 2007 and early 2008. http://www.oceanlinx.com,
2007. [Online; last accessed 16-November-2016].
[23] N Johnson and E Olson. Oscillating Water Column (OWC). http://
owcwaveenergy.weebly.com, 2010. [Online; last accessed 16-November-2016].
[24] K Budal and J Falnes. Optimum operation of improved wave-power converter.
Mar. Sci. Commun.;(United States), 3(2), 1977.
[25] DV Evans. Wave-power absorption by systems of oscillating surface pressure
distributions. Journal of Fluid Mechanics, 114(1):481–499, 1982.
[26] AJNA Sarmento and AF de O Falcao. Wave generation by an oscillating surface-
pressure and its application in wave-energy extraction. Journal of Fluid Me-
chanics, 150:467–85, 1985.
[27] Alan Fleming, Irene Penesis, Gregor Macfarlane, Neil Bose, and Tom Denniss.
Energy balance analysis for an oscillating water column wave energy converter.
Ocean Engineering, 54:26–33, 2012.
136

[28] SPR Czitrom, R Godoy, E Prado, P Perez, and R Peralta-Fabi. Hydrodynamics
of an oscillating water column seawater pump: Part i: theoretical aspects.
Ocean engineering, 27(11):1181–1198, 2000.
[29] TS Zhao and P Cheng. The friction coefficient of a fully developed laminar
reciprocating flow in a circular pipe. International journal of heat and fluid
flow, 17(2):167–172, 1996.
[30] A Brendmo, J Falnes, and PM Lillebekken. Linear modelling of oscillating water
columns including viscous loss. Applied ocean research, 18(2):65–75, 1996.
[31] LMC Gato and AF de O Falcao. On the theory of the wells turbine. Journal
of engineering for gas turbines and power, 106(3):628–633, 1984.
[32] Shigeo Uchida. The pulsating viscous flow superposed on the steady laminar
motion of incompressible fluid in a circular pipe. Zeitschrift fur angewandte
Mathematik und Physik ZAMP, 7(5):403–422, 1956.
[33] Felice Arena, Vincenzo Fiamma, Valentina Laface, Giovanni Malara, Alessan-
dra Romolo, Antonino Viviano, Gianmaria Sannino, and Adriana Carillo. In-
stalling u-owc devices along italian coasts. In ASME 2013 32nd International
Conference on Ocean, Offshore and Arctic Engineering, pages V008T09A061–
V008T09A061. American Society of Mechanical Engineers, 2013.
[34] D Ross. Power from sea waves. Oxford University Press, United Kingdom,
1995.
[35] TJT Whittaker, SJ McIwaine, and S Raghunathan. A review of the islay
shoreline wave power station. In Proceedings of (First) European Wave Energy
Symposium, pages 283–6, 1993.
[36] H Ohneda, S Igarashi, O Shinbo, S Sekihara, K Suzuki, H Kubota, H Ogino, and
H Morita. Construction procedure of a wave power extracting caisson break-
water. In Tokyo: Proceedings of 3rd Symposium on Ocean Energy Utilization,
pages 171–9, 1991.
137
[37] Y Washio, H Osawa, Y Nagata, F Fujii, H Furuyama, and T Fujita. The offshore
floating type wave power device mighty whale: open sea tests. In Proceedings
of the 10th international offshore and polar engineering conference, volume 1,
pages 373–380, 2000.
[38] Pico OWC. OWC Pico power plant. http://www.pico-owc.net, 1999. [Online;
last accessed 16-November-2016].
[39] R Alcorn, S Hunter, C Signorelli, R Obeyesekera, T Finnigan, and T Denniss.
Results of the testing of the energetech wave energy plant at port kembla.
Energeth Report, 2005.
[40] Y Masuda, H Kimura, X Liang, X Gao, RM Mogensen, and T Andersen. Re-
garding bbdb wave power generation plant. In Proceedings of 2nd European
Wave Power Conference, pages 69–76, 1995.
[41] Ocean Energy. Ocean Energy-a world of power. http://www.oceanenergy.ie,
2011. [Online; last accessed 16-November-2016].
[42] Y Torre-Enciso, I Ortubia, LI Lopez de Aguileta, and J Marques. Mutriku
wave power plant: from the thinking out to the reality. In Proceedings of the
8th European Wave and Tidal Energy Conference, pages 319–329, 2009.
[43] Korea Research Institute of Ships and Ocean Engineering. Ocean energy policy.
https://report2014.ocean-energy-systems.org.
[44] Felice Arena, Alessandra Romolo, Giovanni Malara, and Alfredo Ascanelli. A
new u-owc device to produce electrical power from ocean waves: Some applica-
tions to italian coasts. 2014.
[45] DV Evans. The oscillating water column wave-energy device. IMA Journal of
Applied Mathematics, 22(4):423–433, 1978.
[46] JN Newman. Interaction of water waves with two closely spaced vertical ob-
stacles. J. Fluid Mech, 66(part 1):97–106, 1974.
138
[47] Kenneth M Brown. Computer oriented algorithms for solving systems of si-
multaneous nonlinear algebraic equations. Numerical solution of systems of
nonlinear algebraic equations, pages 281–348, 1973.
[48] J Falnes and P McIver. Surface wave interactions with systems of oscillating
bodies and pressure distributions. Applied Ocean Research, 7(4):225–234, 1985.
[49] DV Evans and R Porter. Hydrodynamic characteristics of an oscillating water
column device. Applied Ocean Research, 17(3):155–164, 1995.
[50] Herve Martins-Rivas and Chiang C Mei. Wave power extraction from an os-
cillating water column at the tip of a breakwater. Journal of Fluid mechanics,
626:395–414, 2009.
[51] P Perez, SPR Czitrom, R Peralta-Fabi, and C Trevino. Friction in oscillating
flows. In Proc. 2nd European Wave Power Conference, Lisbon, Portugal, ISBN,
pages 92–827, 1996.
[52] SPR Czitrom, R Godoy, E Prado, A Olvera, and C Stern. Hydrodynamics of
an oscillating water column seawater pump. part ii: tuning to monochromatic
waves. Ocean engineering, 27(11):1199–1219, 2000.
[53] Paolo Boccotti. Caisson breakwaters embodying an owc with a small opening-
part i: Theory. Ocean Engineering, 34(5):806–819, 2007.
[54] Felice Arena, Vincenzo Fiamma, Valentina Laface, Giovanni Malara, Alessan-
dra Romolo, Antonino Viviano, Gianmaria Sannino, and Adriana Carillo. In-
stalling u-owc devices along italian coasts. In ASME 2013 32nd International
Conference on Ocean, Offshore and Arctic Engineering, pages V008T09A061–
V008T09A061. American Society of Mechanical Engineers, 2013.
[55] Mikio Hino, A Nakayama, M Kashiwayanagi, and T Hara. Experiments on
the turbulence statistics and the structure of a reciprocating oscillatory flow.
Journal of Fluid Mechanics, 131:363–400, 1983.
139
[56] EG Richardson and E Tyler. The transverse velocity gradient near the mouths
of pipes in which an alternating or continuous flow of air is established. Pro-
ceedings of the Physical Society, 42(1):1, 1929.
[57] John R Womersley. Method for the calculation of velocity, rate of flow and
viscous drag in arteries when the pressure gradient is known. The Journal of
physiology, 127(3):553, 1955.
[58] P Merkli and H Thomann. Transition to turbulence in oscillating pipe flow.
Journal of Fluid Mechanics, 68(03):567–576, 1975.
[59] Munekazu Ohmi, Manabu Iguchi, Koichiro Kakehashi, and Tetsuya Masuda.
Transition to turbulence and velocity distribution in an oscillating pipe flow.
Bulletin of JSME, 25(201):365–371, 1982.
[60] D Das and JH Arakeri. Transition of unsteady velocity proles with reverse ow.
J. Fluid, 1998.
[61] Yunus A Cengel, Vıctor Cimbala, M John, et al. Fluid mechanics fundamentals
and applications. Mecanica de fluidos: fundamentos y aplicaciones. Number
TA357. C4318 2006. 2006.
[62] Gentaro Yamanaka, Hiroshige Kikura, Yasushi Takeda, and Masanori Aritomi.
Flow measurement on an oscillating pipe flow near the entrance using the uvp
method. Experiments in fluids, 32(2):212–220, 2002.
[63] JF Ury. Viscous damping in oscillating liquid columns, its magnitude and
limits. International Journal of Mechanical Sciences, 4(5):349–369, 1962.
[64] FM Donovan, RW McIlwain, DH Mittmann, and BC Taylor. Experimental
correlations to predict fluid resistance for simple pulsatile laminar flow of in-
compressible fluids in rigid tubes. Journal of fluids engineering, 116(3):516–521,
1994.
140

[65] Munekazu Ohmi, Manabu Iguchi, and Ikuo Urahata. Flow patterns and fric-
tional losses in an oscillating pipe flow. Bulletin of JSME, 25(202):536–543,
1982.
[66] Suhith Illesinghe, Md Kamrul Hasan, and Richard Manasseh. Multiphase dy-
namics of oscillating-water-column ocean wave energy converters. In 18th Aus-
tralasian Fluid Mechanics Conference, Launceston, Australia, 2012.
[67] BL Jensen, BM Sumer, and J Fredsøe. Turbulent oscillatory boundary layers
at high reynolds numbers. Journal of Fluid Mechanics, 206:265–297, 1989.
[68] AF de O Falcao and PAP Justino. Owc wave energy devices with air flow
control. Ocean Engineering, 26(12):1275–1295, 1999.
[69] ST McComas. Hydrodynamic entrance lengths for ducts of arbitrary cross
section. Journal of Basic Engineering, 89(4):847–850, 1967.
[70] Bernard Atkinson, MP Brocklebank, CCH Card, and JM Smith. Low reynolds
number developing flows. AIChE Journal, 15(4):548–553, 1969.
[71] D Fargie and BW Martin. Developing laminar flow in a pipe of circular cross-
section. In Proceedings of the Royal Society of London A: Mathematical, Phys-
ical and Engineering Sciences, volume 321, pages 461–476. The Royal Society,
1971.
[72] F Durst, S Ray, B Unsal, and OA Bayoumi. The development lengths of laminar
pipe and channel flows. Journal of fluids engineering, 127(6):1154–1160, 2005.
[73] PJ Florio and WK Mueller. Development of a periodic flow in a rigid tube.
Journal of Basic Engineering, 90(3):395–399, 1968.
[74] Munekazu OHMl, Tateo USUl, Michio Fukawa, and Shuich HIRASAKI. Pres-
sure and velocity distributions in pulsating laminar pipe flow. Bulletin of JSME,
19(129):298–306, 1976.
141

[75] AB Metzner and V Streeter. Handbook of fluid dynamics. McGraw-Hill, New
York, page 5, 1961.
[76] AR Barbin and JB Jones. Turbulent flow in the inlet region of a smooth pipe.
Journal of Basic Engineering, 85(1):29–33, 1963.
[77] ASHRAE Handbook. Product directory, fundamentals, 1977. American Society
of Heating, Refrigerating and Air Conditioning Engineers, 1977.
[78] DV Evans. A theory for wave-power absorption by oscillating bodies. Journal
of Fluid Mechanics, 77(01):1–25, 1976.
[79] J Falnes and P McIver. Surface wave interactions with systems of oscillating
bodies and pressure distributions. Applied Ocean Research, 7(4):225–234, 1985.
[80] Johannes Falnes. Radiation impedance matrix and optimum power absorption
for interacting oscillators in surface waves. Applied Ocean Research, 2(2):75–80,
1980.
[81] Stephen H Salter. Wave power. Nature, 249(5459):720–724, 1974.
[82] George Karniadakis and Spencer Sherwin. Spectral/hp element methods for
computational fluid dynamics. Oxford University Press, 2013.
142


















![C:\fakepath\43 kamrul kabilan-usm-u5-008[1]](https://img.pdfslide.us/doc/110x75/546df03eb4af9f7f2c8b55d3/cfakepath43-kamrul-kabilan-usm-u5-0081.jpg)