Embed Size (px)
Citation preview
SurroundSense: Mobile Phone Localization via Ambience
Fingerprinting
MARTIN AZIZYAN, IONUT CONSTANDACHE, ROMIT ROY CHOUDHURY
Presented by Lingfei Wu
Outline
Introduction SurroundSense Architecture System Design Implementation Evaluation Conclusion
Introduction
Notion of location Physical coordinates(latitude/longitude) Logical labels(like Starbucks, Mcdonalds)
Many applications based on logical location
Application of logical localization
Introduction Physical coordinate can be reversed to logical location. However, it often causes error ! Why not compute logical location directly?
Relative work
Active RF Install special hardware Ultrasound, Bluetooth
Passive RF GPS, GSM or WIFI based
Behavior Sensing Imaging matching
1. Lack accuracy
2. Need pre-installed infrastructure
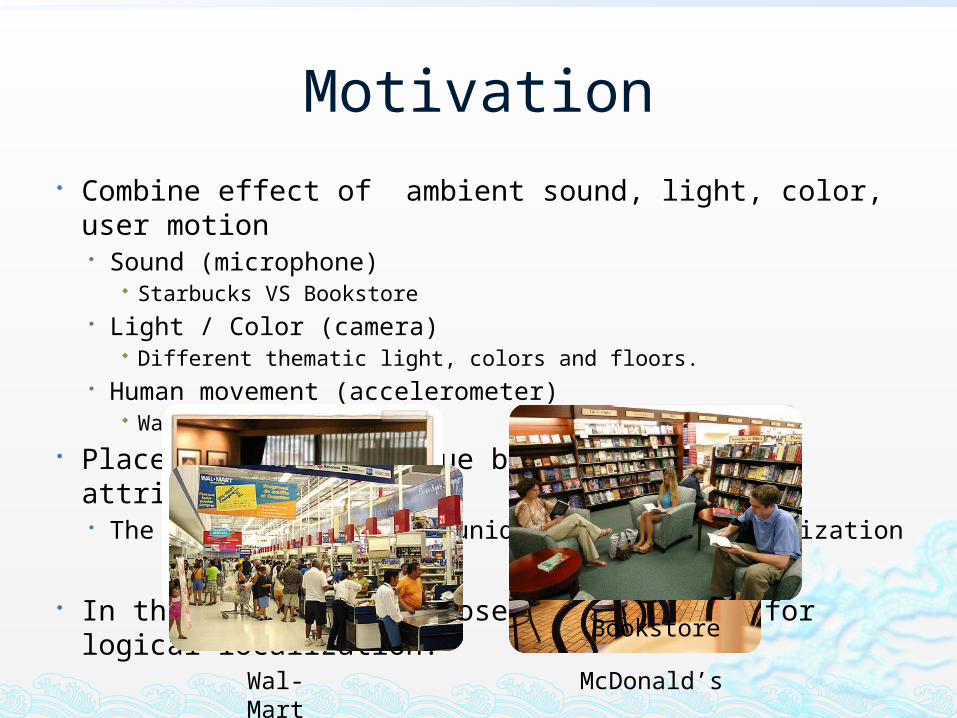
Motivation Combine effect of ambient sound, light, color, user motion
Sound (microphone) Starbucks VS Bookstore
Light / Color (camera) Different thematic light, colors and floors.
Human movement (accelerometer) Wal-Mart VS McDonald
Place may not be unique based on any one attribute The combination can be unique enough for localization
In this paper, we propose SurroundSense for logical localization. Starbucks
McDonald’s
Bookstore
Wal-Mart
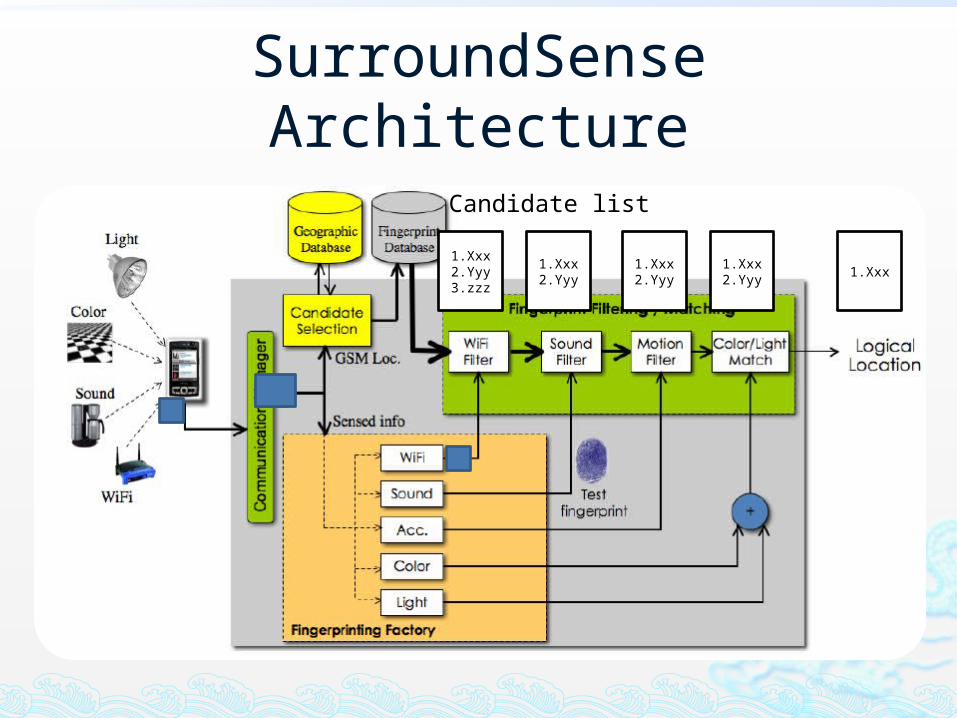
SurroundSense Architecture
1.Xxx2.Yyy3.zzz
Candidate list
1.Xxx2.Yyy
1.Xxx2.Yyy
1.Xxx2.Yyy
1.Xxx
System Design
Fingerprint generation Fingerprinting sound Fingerprinting motion using accelerometers Fingerprinting color/light using cameras Fingerprinting Wi-Fi
Fingerprint matching Wi-Fi filter Sound filter Motion filter Color/light Match
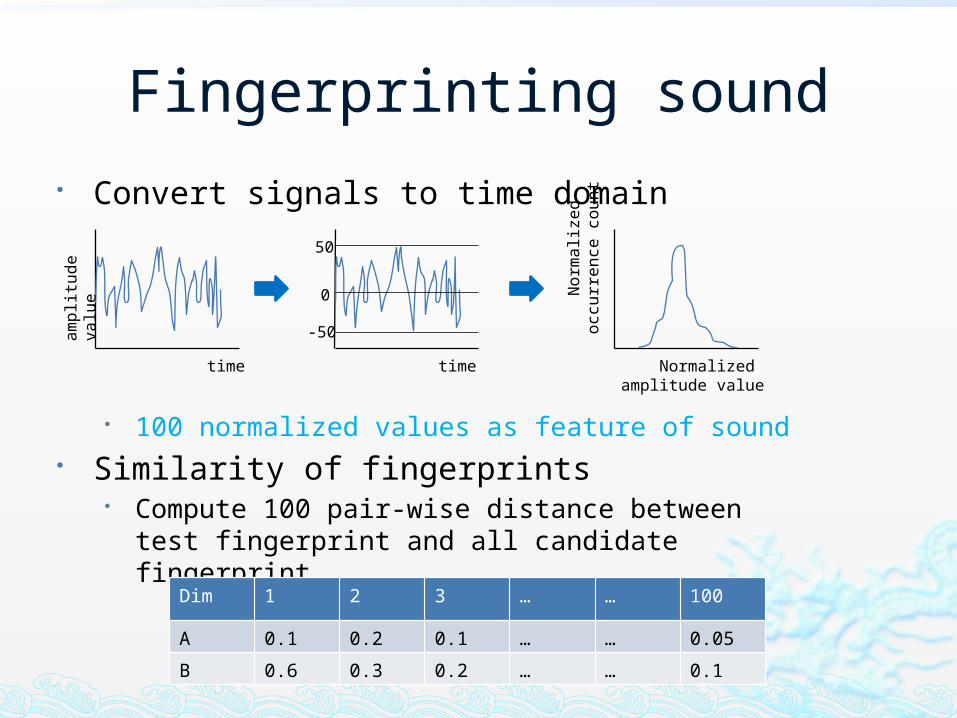
Fingerprinting sound Convert signals to time domain
100 normalized values as feature of sound Similarity of fingerprints
Compute 100 pair-wise distance between test fingerprint and all candidate fingerprint
50
0
-50
Normalized amplitude value
N
orm
aliz
ed o
ccur
renc
e co
unt
time
ampl
itud
e va
lue
time
Dim 1 2 3 … … 100
A 0.1 0.2 0.1 … … 0.05
B 0.6 0.3 0.2 … … 0.1
Fingerprinting Sound
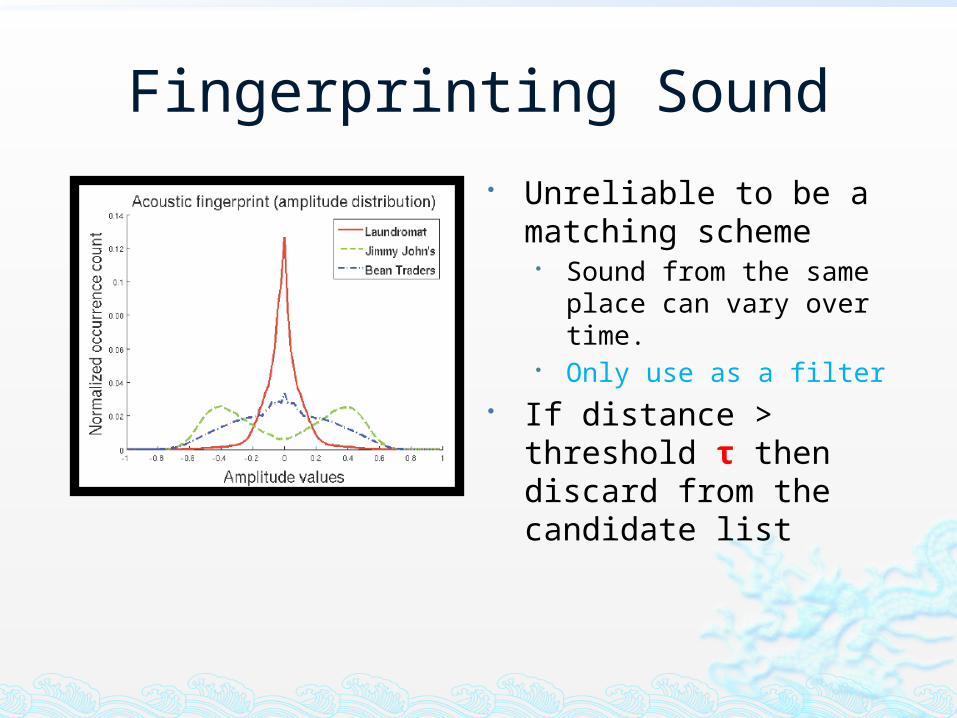
Unreliable to be a matching scheme
Sound from the same place can vary over time.
Only use as a filter If distance > threshold τ
then discard from the candidate list
Fingerprinting Motion
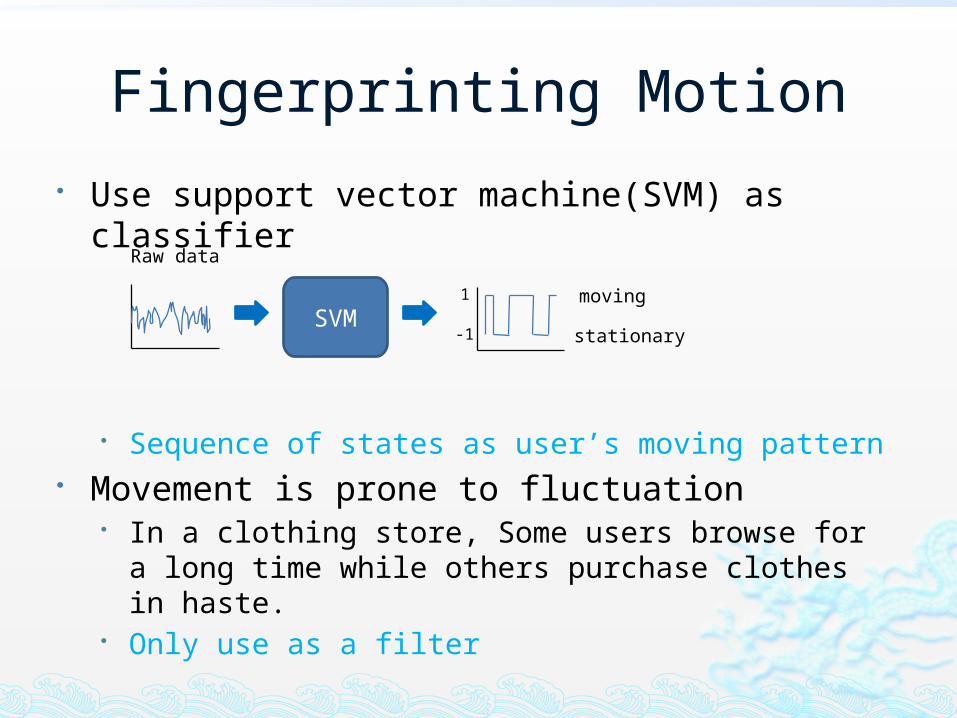
Use support vector machine(SVM) as classifier
Sequence of states as user’s moving pattern Movement is prone to fluctuation
In a clothing store, Some users browse for a long time while others purchase clothes in haste.
Only use as a filter
SVM
Raw data
moving
stationary
1
-1
Fingerprinting Motion
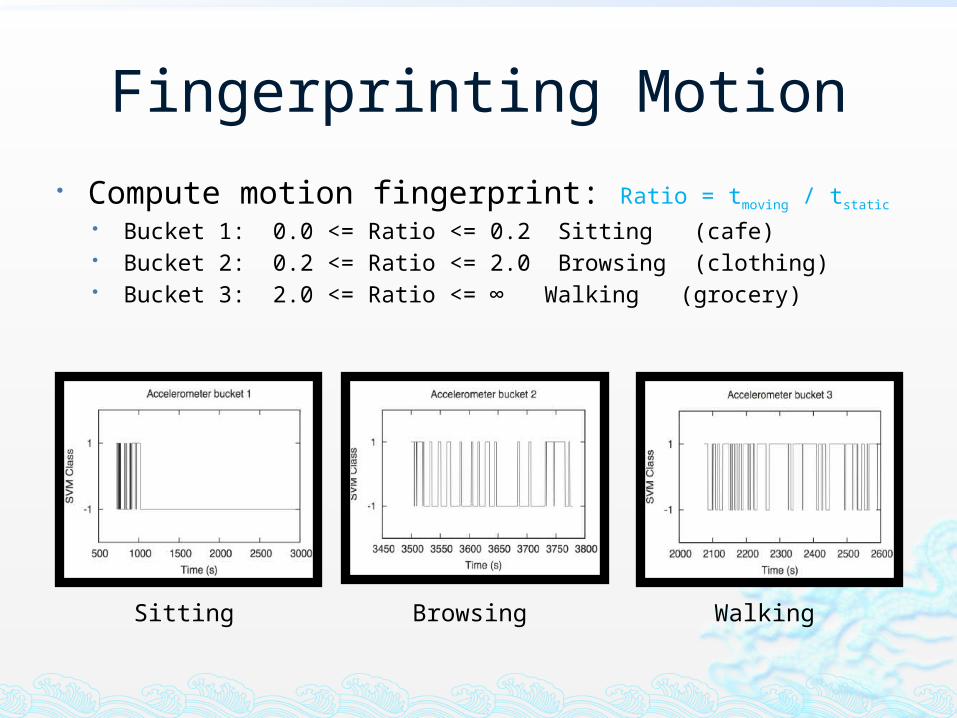
Compute motion fingerprint: Ratio = tmoving / tstatic Bucket 1: 0.0 <= Ratio <= 0.2 Sitting (cafe) Bucket 2: 0.2 <= Ratio <= 2.0 Browsing (clothing) Bucket 3: 2.0 <= Ratio <= ∞ Walking (grocery)
Sitting Browsing Walking
Fingerprinting Color / Light
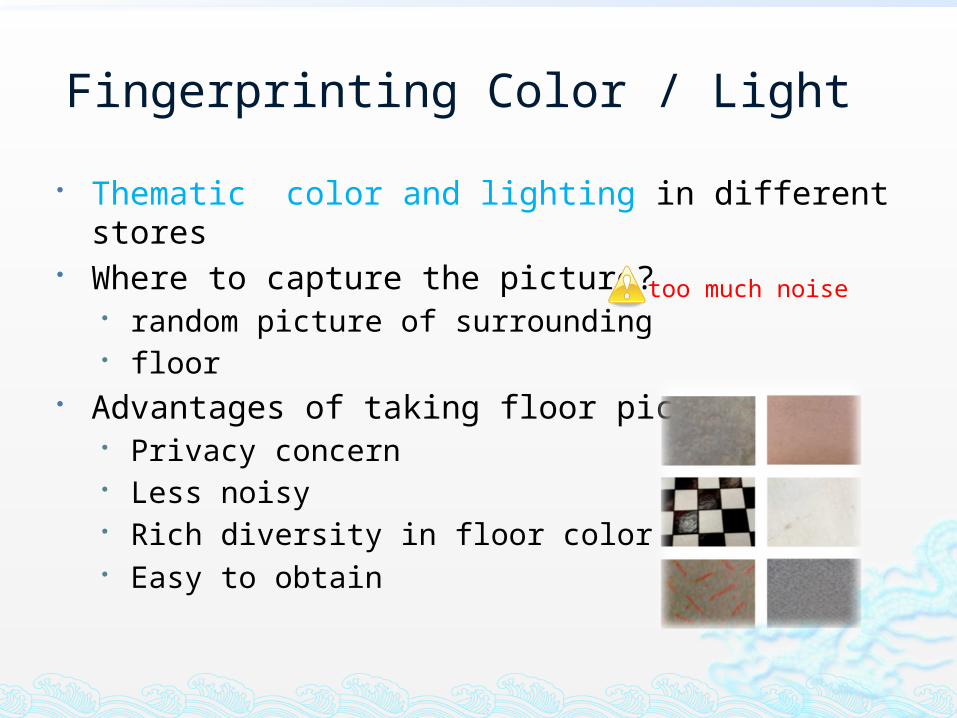
Thematic color and lighting in different stores Where to capture the picture?
random picture of surrounding floor
Advantages of taking floor pictures Privacy concern Less noisy Rich diversity in floor color Easy to obtain
too much noise
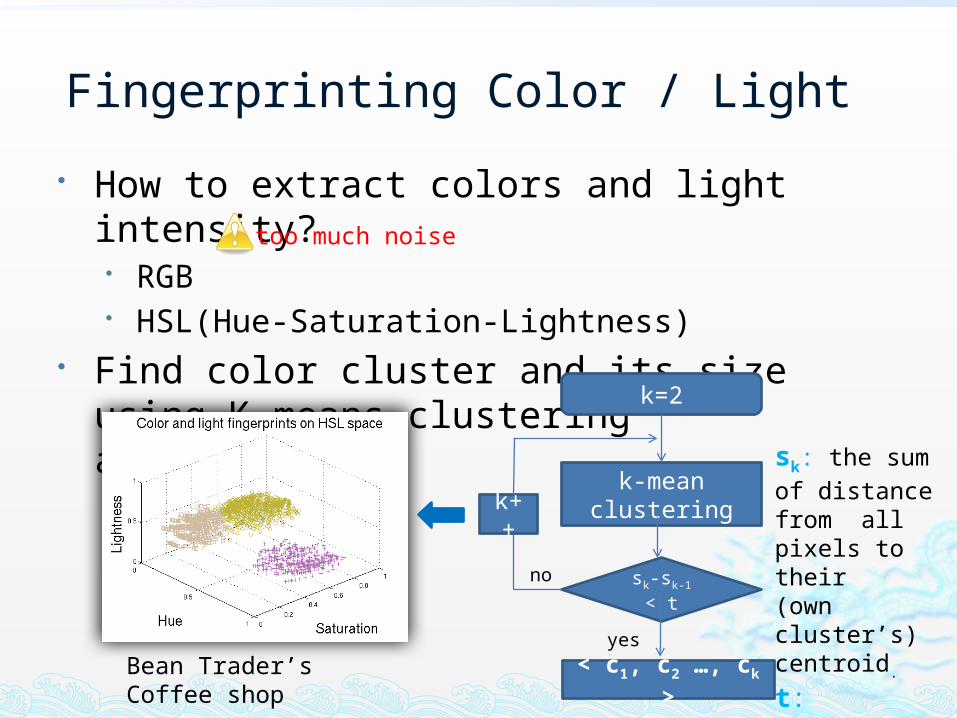
Fingerprinting Color / Light How to extract colors and light intensity?
RGB HSL(Hue-Saturation-Lightness)
Find color cluster and its size using K-means clustering algorithm
k=2
sk-sk-1 < t
k-mean clusteringk++
no
yes
sk: the sum of distance from all pixels to their (own cluster’s) centroid.
t: convergence threshold
< c1, c2 …, ck >Bean Trader’s Coffee shop
too much noise
Fingerprinting Color / Light
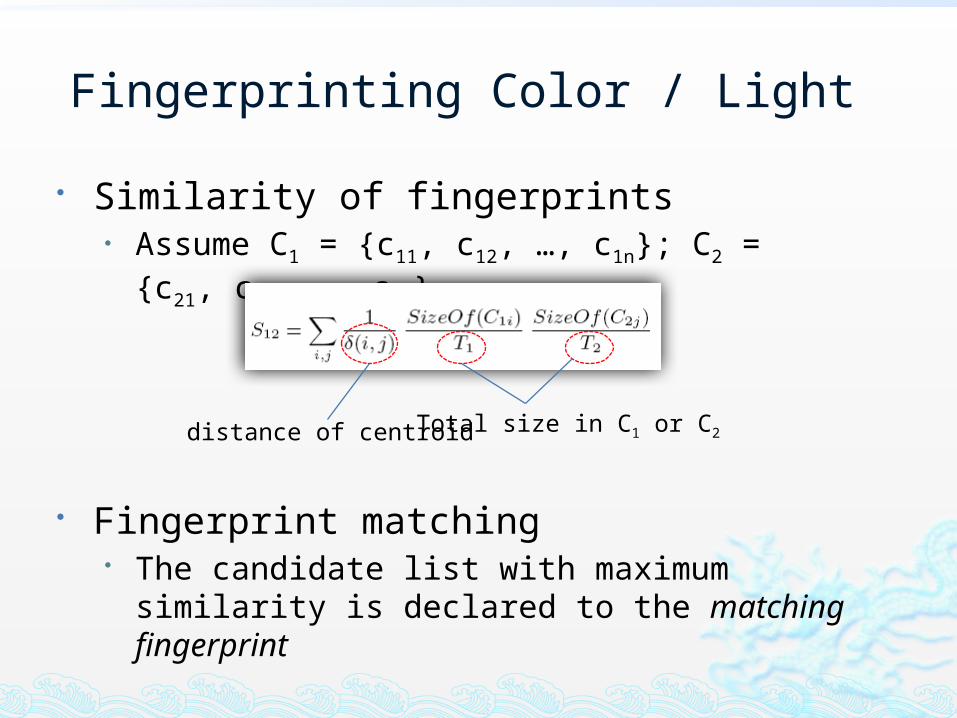
Similarity of fingerprints Assume C1 = {c11, c12, …, c1n}; C2 = {c21, c22, …, c2m}
Fingerprint matching The candidate list with maximum similarity is
declared to the matching fingerprint
Total size in C1 or C2distance of centroid
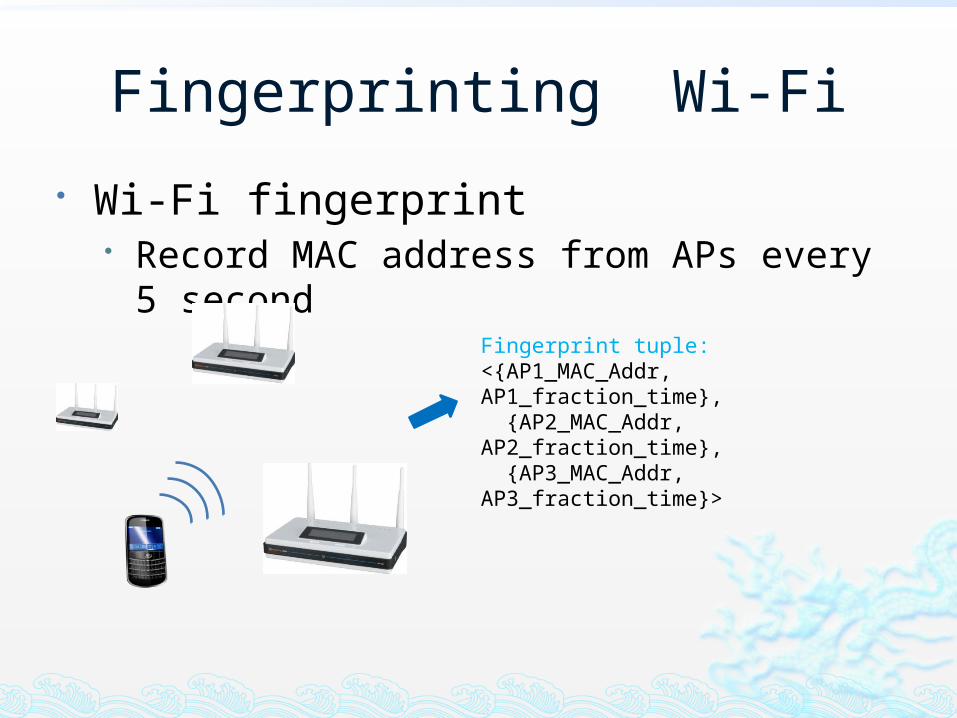
Fingerprinting Wi-Fi
Wi-Fi fingerprint Record MAC address from APs every 5 second
Fingerprint tuple:<{AP1_MAC_Addr, AP1_fraction_time}, {AP2_MAC_Addr, AP2_fraction_time}, {AP3_MAC_Addr, AP3_fraction_time}>
Fingerprinting Wi-Fi
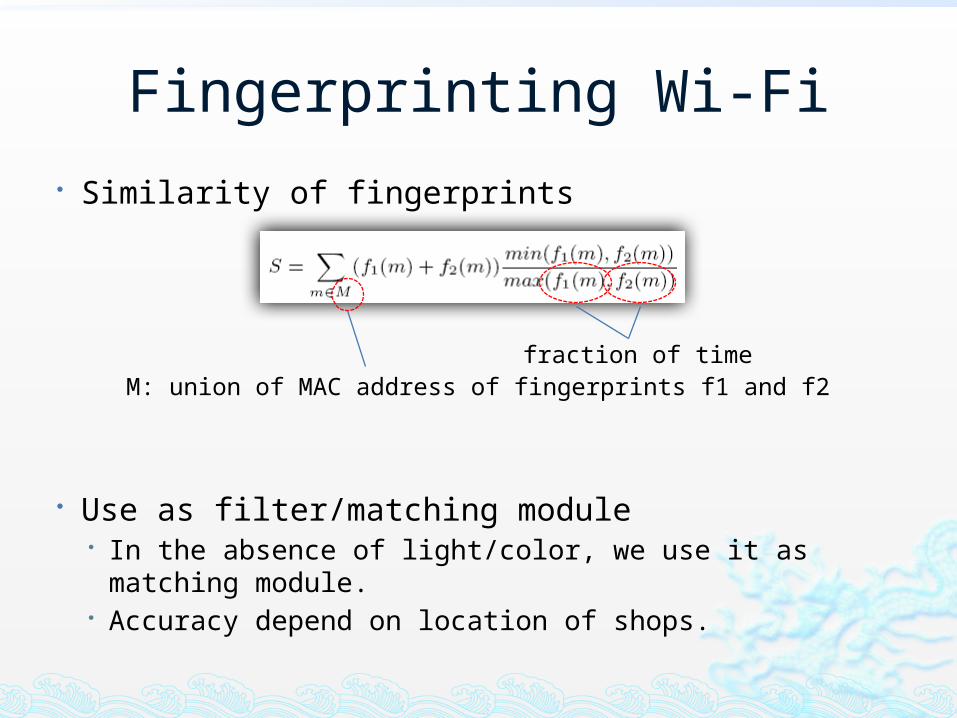
Similarity of fingerprints
Use as filter/matching module In the absence of light/color, we use it as matching module. Accuracy depend on location of shops.
M: union of MAC address of fingerprints f1 and f2fraction of time
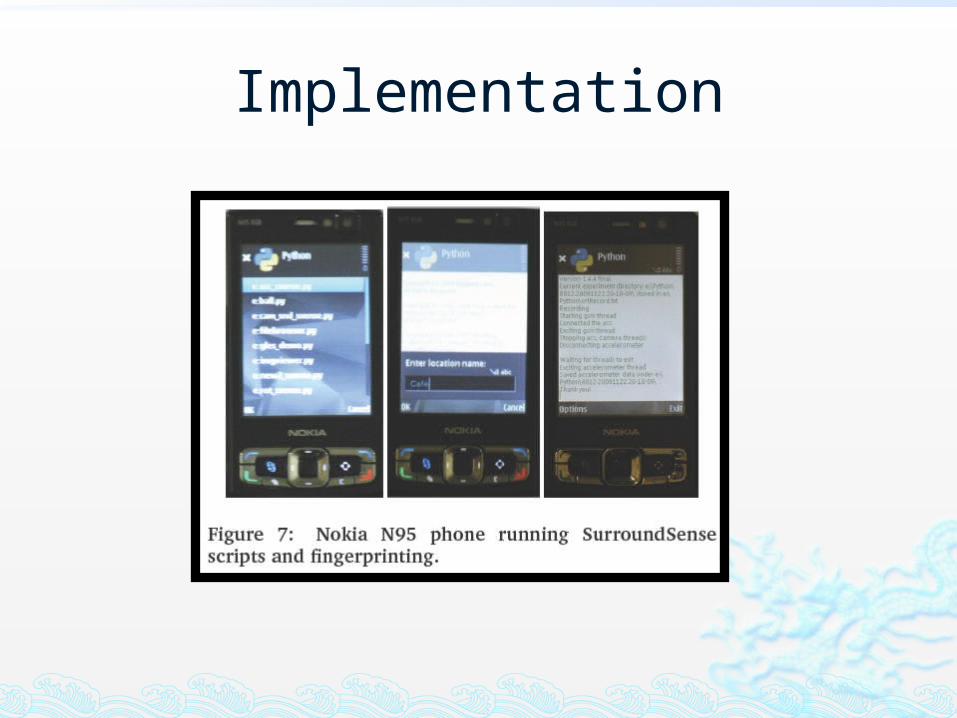
Implementation
Client and server Client: Nokia 95 phones using Python as client Server: Matlab and Python code and some data
mining tools for fingerprinting algorithms. Fingerprint database
Labor-intensive war-sensing at 51 stores Store location: 46 business location in
university town, 5 location in India
Implementation
Evaluation
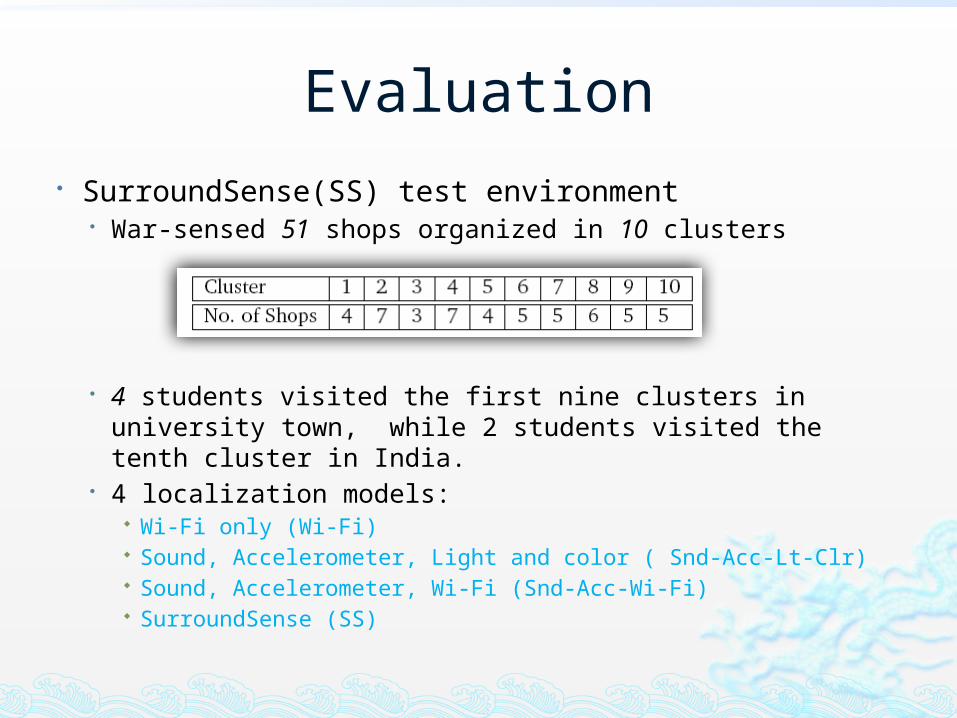
SurroundSense(SS) test environment War-sensed 51 shops organized in 10 clusters
4 students visited the first nine clusters in university town, while 2 students visited the tenth cluster in India.
4 localization models: Wi-Fi only (Wi-Fi) Sound, Accelerometer, Light and color ( Snd-Acc-Lt-Clr) Sound, Accelerometer, Wi-Fi (Snd-Acc-Wi-Fi) SurroundSense (SS)
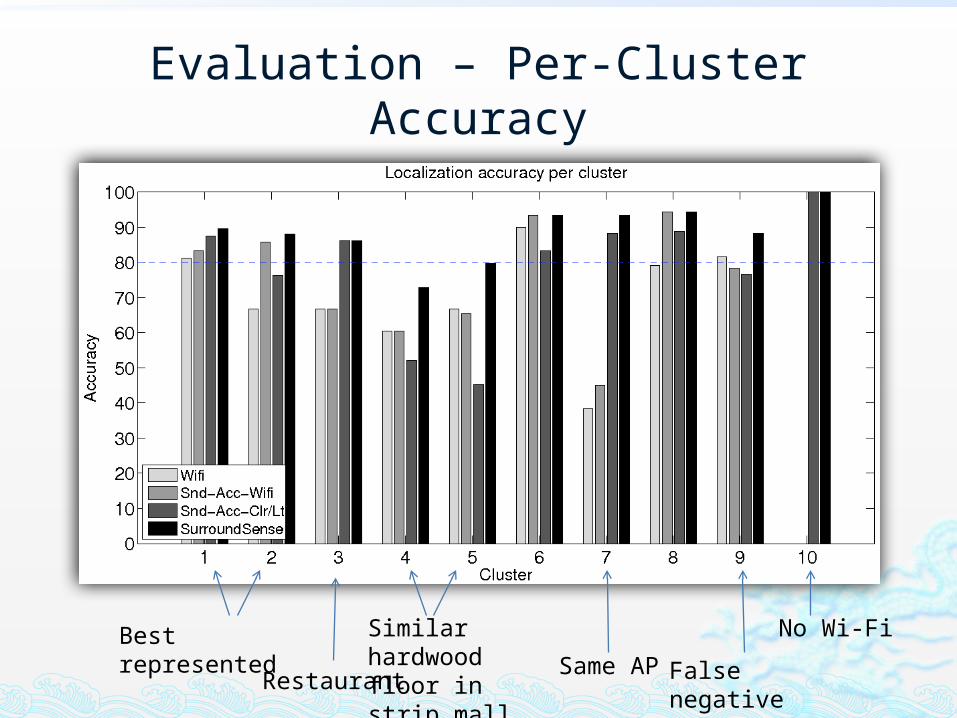
Evaluation – Per-Cluster Accuracy
Best represented
Restaurant
Similar hardwood floor in strip mall Same AP False negative
Snd and Acc
No Wi-Fi
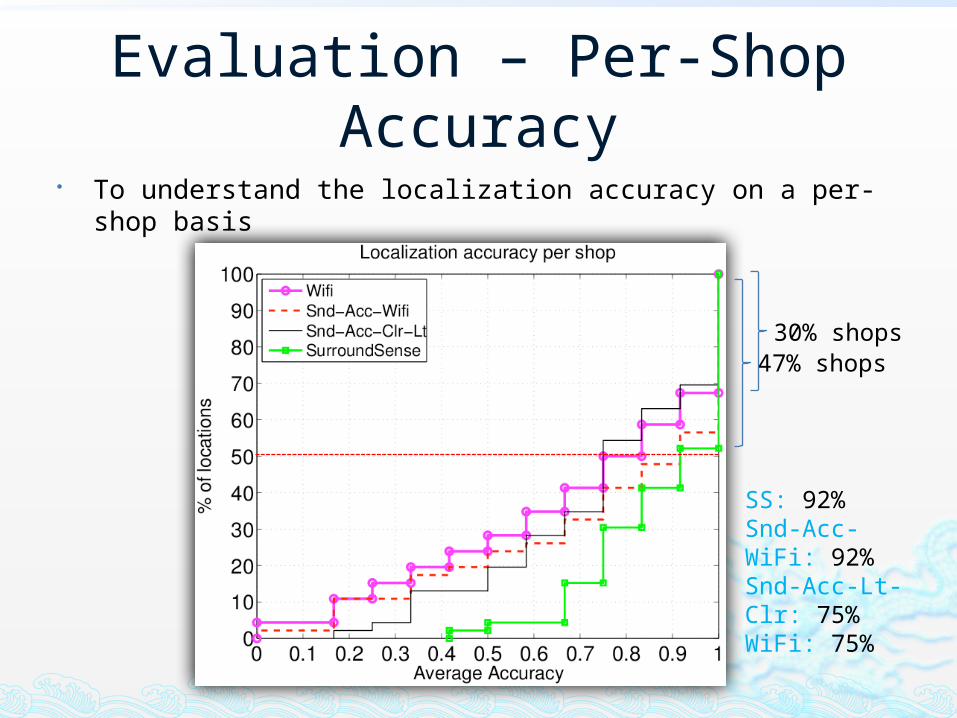
Evaluation – Per-Shop Accuracy
To understand the localization accuracy on a per-shop basis
47% shops30% shops
SS: 92%Snd-Acc-WiFi: 92%Snd-Acc-Lt-Clr: 75%WiFi: 75%

Evaluation – Per-User Accuracy
Simulate 100 virtual user, each assign 4~8 stores from cluster 1~9
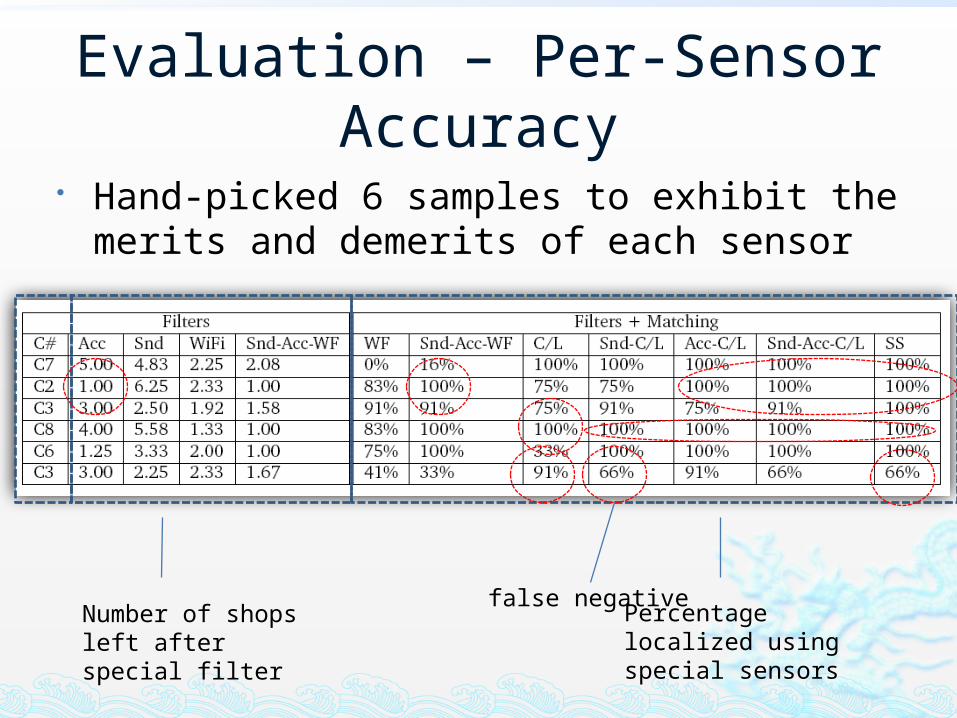
Evaluation – Per-Sensor Accuracy
Hand-picked 6 samples to exhibit the merits and demerits of each sensor
false negativePercentage localized using special sensors
Number of shops left after special filter
Conclusion
Presented SurroundSense, a non-conventional approach for logical localization.
Created fingerprints about ambient sound, light, color, movement and Wi-Fi and match them with fingerprint database to realize accurate logical localization.
The evaluation achieved an average location accuracy of over 85% using all sensors.
Discussion The GPS 10 m, Wi-Fi and GSM 40m and 400m respectively.
Why not use Wi-Fi to get initial location instead of using GSM?
Support vector machines (SVM), K-means clustering algorithm are used in paper, do you have any better machine learning methods? Such as Kalman filter, Particle filter, and Wavelet Transform?
Can other sensors help? Such as compass and Bluetooth? Energy consideration? Non-business location?

![Publications Dr. Samuel A. Johnson - University of Windsor · Publications – Dr. Samuel A. Johnson 2019 [54]F Matthew R. Elsby, Junyang Liu, Sha Zhu, Lingfei Hu, Genping Huang*,](https://img.pdfslide.us/doc/110x75/5fd187bbe781df2e940e15ff/publications-dr-samuel-a-johnson-university-of-publications-a-dr-samuel-a.jpg)