Embed Size (px)
Citation preview

Simulation Modelling Practice and Theory 15 (2007) 47–56
www.elsevier.com/locate/simpat
Study on structural optimum design of implantable drugdelivery micro-system
Xiaopeng Wang a,*, Tianning Chen a, Zhanxiao Yang a, Wanjun Wang b
a School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, PR Chinab Department of Mechanical Engineering, Louisiana State University, Baton Rouge, LA 70803, United States
Received 12 May 2006; accepted 12 September 2006Available online 22 November 2006
Abstract
In this paper, design, modeling, and simulation of a new type of controlled drug delivery system based on biodegradablepolymers is report. The system consists of arrays of micro-chambers for drug storage to achieve linear release. The micro-chambers were fabricated with biodegradable polymer using the UV-LIGA technology and the controlled release processis the combined results of design of the micro-chambers and the biodegradable characteristics of the polymer. This type ofdrug delivery system has some unique advantages in controlled long-term drug delivery, such as improved efficiency,reduced side effect, on-spot delivery, and convenient therapy. Mathematical model has been developed for two kind of bio-degradable polymer micro-system respectively, and numerical simulations were conducted to analyze the biodegradationand the controlled release process. The mathematical model can be used to optimize the structural design for controlled-release system with the desired release characteristics.� 2006 Elsevier B.V. All rights reserved.
Keywords: Structural optimum design; Biodegradable polymers; Drug delivery micro-system; Microstructure; Simulation
1. Introduction
Degradable polymers have been widely used in medical and pharmaceutical applications. For example,polyanhydrides (CPP-SA) have been used for the treatment of brain cancer in human using disc shapedimplants loaded with antineoplastic agents [1]; poly(lactic-co-glycolic acid) (PLGA) copolymers have been uti-lized either as temporary scaffolds for cell transplantation to regenerate various tissues or as carriers for deliv-ery of bioactive molecules [2–5] and they have been approved to use in pharmaceutical products or medicaldevices by the United States Food and Drug Administration (US FDA) [6].
In drug delivery applications, the quality of polymer erosion determines the release of active agent. So, it isimportant to know how degradable polymers degrade and erode. Burkersroda FV developed a theoretical ero-sion model for water insoluble biodegradable polymer matrices [7]. Gopferich A investigated the degradation
1569-190X/$ - see front matter � 2006 Elsevier B.V. All rights reserved.
doi:10.1016/j.simpat.2006.09.017
* Corresponding author. Tel.: +86 298 2665376.E-mail address: [email protected] (X. Wang).

48 X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56
and erosion mechanisms of polymers [8–11]. Further more, the release rate of the designed controlled-releasedrug delivery systems can be affect by other factors, such as drug loading, porosity, the dispersion of the drug,and so on. Zygourakis proposed the Cellular automata-based models for the simulation of drug release fromsurface eroding polymer matrices and optimized some parameters to get the desired release characteristics[12,13]. Gopferich designed a bioerodible implants with programmable drug release through optimizing thethickness of every layer [14]. Georgiadis presented a systematic optimization framework to achieve desiredrelease rate in drug delivery devices using multi-laminated layers [15].
PLGA have been developed an implantable drug delivery system consisting of micro-chambers array [16].The schematic design of the biodegradable drug delivery system to be analyzed is shown in Fig. 1(a). Themicro-chambers as shown in Fig. 1(a) can be realized using a PDMS mold insert, which itself was made using
Fig. 1. (a) Schematic design of biodegradable microstructure for drug delivery system. (b) Photograph of a prototype PLGAmicrostructure molded using a PDMS insert mold. (c) Photograph of PLGA micro-system with drug.

X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56 49
an intermediate mold made of cured SU-8 microstructure fabricated lithographically. Photograph of a proto-type microstructure produced this way is shown in Fig. 1(b) and the PLGA micro-system with drug alsoshown in Fig. 1(c).
Compared with most of the reported work in implantable drug delivery systems, this new design takesadvantages of the biodegradable polymers and therefore does not require to be removed after delivery ofthe targeted drugs. The microstructures were designed so that when the microstructures are implanted, lineardrug releases can be obtained as the carrier material degrades layer by layer. The period and the amount of thedrug to be delivered are therefore controlled by the number of layers and the thickness of the micro-chambers’walls. PLGA and CPP-SA microstructures with very high aspect-ratio and excellent sidewall quality weremolded with SU-8 insert mold that was lithographically made. Multi-layers of the microstructures have beenglued together to form sealed micro-chambers. Prototypes of systems have been made to achieve roughly lin-ear drug release rate [16].
The polymers forming the micro-chambers degrade by simple hydrolysis of the ester bonds into monomer,which are removed from the body through normal metabolic pathways. This type of drug delivery systems hassome unique advantages in controlled long-term drug delivery, such as larger delivery load than the matricesrelease systems, easier control of the release rate, etc.
To obtain a controlled release of packed drug in the array of the micro-chambers, a better understandingfor the biodegradation process needs to be developed. In this paper, we present mathematical models for thepolymer biodegradation and the drug release process and numerical simulations of this process for implant-able drug delivery micro-system made of PLGA and CPP-SA for optimized release.
In the structural optimum design of this micro-system, the optimization for the release rate of the CPP-SAdrug delivery system is regarded as the objective function. The optimal design for the drug delivery system wasdetermined by combination of the required release rate and working conditions. This result will indicate thatthe optimization method plays an important role in designing the drug delivery micro-system using biodegrad-able polymers.
2. Modeling of drug release from the drug delivery micro-system
The erosion of biodegradable polymers depends on many factors including the polymer chain length, bondcleavage velocity, swellability, crystallinity, and water diffusivity in the polymer matrix. This multitude ofparameters makes modeling of erosion difficult. In the present approach the polymer matrix and the drug wererepresented as the sum of small individual polymer matrix parts. The factors that determine erosion were com-bined, and the erosion of each matrix piece was regarded as a random event. Once such a matrix piece hadcome into contact with water, an individual life expectation was assigned to it using Monte Carlo techniques[8–10].
For the CPP-SA drug delivery micro-system, the surface erosion polymer, a two-dimensional rectangulargrid consisting of nx · ny grid points as shown in Fig. 2 was constructed to describe the two-dimensional deg-radation process of the micro-system. Each grid pixel refers to one element of either polymer or drug and eachhas an expected value. When the neighboring cells of a specific grid pixel were eroded because of biodegrada-tion, the expected value of this pixel cell starts to reduce, and eventually becomes zero. It is assumed thatwhenever a drug pixel erodes, an appropriate amount of drug contained in that cell is spontaneously released.Eqs. (1)–(7) describe the configuring the computational grid prior to erosion.
Fig. 2. Schematic representation of drug delivery micro-system using a two-dimensional rectangular grid.

50 X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56
As showed in Fig. 2, each grid pixel Pi,j is assumed to be in one of four possible states: fast-eroding (amor-phous), slow-eroding (crystalline), ‘‘eroded’’ or drug eroding and releasing (drug).
xi;j ¼ 1 \crystalline" polymer pixel;
xi;j ¼ 0 \amorphour" polymer pixel;
xi;j ¼ �1 \eroded" pixel;
xi;j ¼ 2 \drug" pixel:
8>>><>>>:
ð1Þ
At time t = 0, the status of all polymer pixels is assessed from consecutive Bernoulli trials. v is the crystallinityof the polymer and c is the probability that a pixel presents a ‘‘crystalline’’ or an ‘‘amorphous’’ part of thepolymer and this is the foundation of the expected value of polymer pixel.
cðxi;jÞ ¼ 1� v xi;j ¼ 0;
cðxi;jÞ ¼ v xi;j ¼ 1:
�ð2Þ
For computational convenience, a function is defined to describe the status of a pixel as either eroded or non-eroded. s(xi,j) = 1 is non-eroded pixel and s(xi,j) = 0 is eroded pixel. When a non-eroded grid pixel has aneroded neighboring pixel, its expected value starts to reduce, and eventually becomes eroded status.
sðxi;jÞ ¼ 1 xi;j ¼ 0;
sðxi;jÞ ¼ 1 xi;j ¼ 1;
sðxi;jÞ ¼ 1 xi;j ¼ 2;
sðxi;jÞ ¼ 0 xi;j ¼ �1:
8>>><>>>:
ð3Þ
As the micro-system is eroded from periphery, the initial condition can be defined as follows:
sðxi;jÞ ¼ 0 ði ¼ 1; nx 1 6 j 6 nyÞ;sðxi;jÞ ¼ 0 ðj ¼ 1; ny 1 6 i 6 nxÞ:
�ð4Þ
For the pixel Pi,j, its states can be described as Eq. (1) and its expected value can be calculated by Eq. (5). Theexpected value of amorphous pixel and crystalline pixels is obtained in Gopferich’s erosion model [9], and theexpected value of drug pixels is assumed as constant k.
ti;j ¼ � 1kcny
lnð1� eÞ \crystalline" polymer pixel;
ti;j ¼ � 1kany
lnð1� eÞ \amorphour" polymer pixel;
ti;j ¼ k \drug" pixel;
8><>: ð5Þ
where k is constant depend on the drug, kc and ka are the constants for amorphous and crystalline polymerpixels.
The time TiÆj at which a pixel PiÆj ‘‘erodes’’ is calculated according to
T i;j ¼ tminði; jÞ þ ti;j; xi;j ¼ 0; 1; 2Piþ1
i�1
Pjþ1
j�1
sðxi;jÞ < 9;
T i;j ¼ T i;j xi;j ¼ �1Piþ1
i�1
Pjþ1
j�1
sðxi;jÞ < 9;
T i;j ¼ 1Piþ1
i�1
Pjþ1
j�1
sðxi;jÞ ¼ 9;
8>>>>>>>>><>>>>>>>>>:
ð6Þ
where tmin(i, j) is the time at which a pixel had its first contact with an eroded neighbor.Drug delivery function can be defined as follows:
MðtÞ ¼ 1� NðtÞNð0Þ ; ð7Þ
MiðDtÞ ¼ MiðtiÞ �Mi�1ðti�1Þ; ð8Þ

X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56 51
where N(t) represents the number of drug pixel that is defined in Eq. (1) in two-dimensional rectangular grid atthe time t, and N(0)represents the number of drug pixel at the initial time. M(t) represents the cumulating ofdrug release at the time t, and Mi(Dt) represents drug release at the period of time.
For the PLGA drug delivery micro-system, because PLGA is bulk erosion polymer, its degrade is differentform the CPP-SA micro-system. A two-dimensional rectangular grid consisting of nx · ny grid points as shownin Fig. 2 was also constructed to describe the two-dimensional degradation process of the micro-system. Eachgrid pixel refers to one element of either polymer or drug and each has an expected degrade value. Once thelifetime of a pixel Pi,j expires, it is assumed to be degraded. Degradation of a pixel, however, cannot lead to theerosion of the grid site as long the mass loss is prevented by nondegraded neighbors. Only if at least one of theeight neighboring pixels is already eroded can a degraded pixel release its degradation products into the ero-sion medium and be finally regarded as eroded [10]. Therefore, Eqs. (9)–(12) describe the configuring the com-putational grid prior to bulk erosion and each grid pixel Pi,j is assumed to be in one of four possible states:‘‘undegraded’’ polymer, ‘‘degraded’’ polymer,‘‘eroded’’ and ‘‘drug’’.
xi;j ¼ 1 \undegraded" polymer pixel
xi;j ¼ 0 \degraded" polymer pixel
xi;j ¼ �1 \eroded" pixel
xi;j ¼ 2 \drug" pixel
8>>><>>>:
ð9Þ
The initial condition can be defined as follows:
xi;j ¼ 0 ði ¼ 2;Nx � 1; j ¼ 2;Ny � 1; 2 6 i; j 6 Nx;y � 1Þ;xi;j ¼ �1 ði ¼ 1;Nx; i ¼ 1;N y ; 1 6 i; j 6 Nx;yÞ:
�ð10Þ
The expected value of ‘‘undegraded’’ polymer pixel and ‘‘degraded’’ polymer pixels is obtained in Gopferich’serosion model [10], and the expected value of drug pixels is assumed as constant k:
ti;j ¼ � 1ka lnðn2Þ lnð1� eÞ \amorphour" polymer pixel;
ti;j ¼ � 1kc lnðn2Þ lnð1� eÞ \crystalline" polymer pixel;
ti;j ¼ k \drug" pixel;
8><>: ð11Þ
where k is constant depend on the drug, kc and ka are the constants for amorphous and crystalline polymer pixels.The time TiÆj at which a pixel PiÆj ‘‘erodes’’ is calculated according to
T i;j ¼ tminði; jÞ þ ti;j; xi;j ¼ 0; 1; 2Piþ1
i�1
Pjþ1
j�1
sðxi;jÞ < 9;
T i;j ¼ T i;j xi;j ¼ �1Piþ1
i�1
Pjþ1
j�1
sðxi;jÞ < 9;
T i;j ¼ 1Piþ1
i�1
Pjþ1
j�1
sðxi;jÞ ¼ 9:
8>>>>>>>>><>>>>>>>>>:
ð12Þ
Finally, drug delivery function also can be defined as Eq. (7).
3. Simulated of the two kinds of micro-system
Using the mathematical model and algorithm presented in the previous section, numerical simulations forthe resulting drug release process were conducted. The parameters used in simulations are as follow: Eachpixel dimension is 5 lm by 5 lm, and the polymer is polyanlydrides (CPP-SA 20:80) and PLGA(50:50), x
is 0.35, kc is 8.75 · 10 � 9 and ka is 7.32 · 10 � 7. The constant k of drug pixel is 0.1.Fig. 3 is the simulation for erosion process of the CPP-SA drug delivery micro-system, and d is the number
of erosion day. Where, d = 0 denotes original state. The micro-system does not begin to erosion and the cir-cumference has been eroded. d = 1 indicates erosion state after one day. It can be draw from Fig. 3 that ero-sion begins from periphery of the structure, and the drug begins to release in the micro-cavity at the same time.

Fig. 3. The erosion process of the CPP-SA drug delivery micro-system.
52 X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56
When d = 4, the drug releases completely, but the structure remains partly. It indicates that the drug releasetime within four days. The dark pixels in the eroded area represent polymer that has not yet eroded despitethat the drug has been released completely. Most of these pixels represent crystalline polymer areas and havethus a higher chance of resisting erosion. By expanding the grid into three dimensions, we can assume thatthese remainders form an interconnected network that is mechanically stable but highly porous. This showsthat the shape of the drug delivery micro-system has not changed after the drug has been released completely.The erosion process simulation of the PLGA drug delivery micro-system is the same to the CPP-SA drugdelivery micro-system.
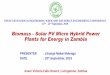
The drug release profiles from CPP-SA micro-system shows as Fig. 4 and the drug release profiles fromPLGA micro-system shows as Fig. 5.
From Figs. 4 and 5 we can see that the PLGA micro-system release time is large than the CPP-SA, and thewhole release time of PLGA micro-system is 768 h but the whole release time of CPP-SA micro-system is only180 h. The PLGA release profile is nearly linear but the CPP-SA is not the linear release. Therefore, the CPP-SA micro-system needs optimum its structural in order to get linear drug release.
0 50 100 150 2000.0
0.2
0.4
0.6
0.8
1.0
Fra
ctia
l rel
ease
Time(hour)
Fig. 4. The simulated drug release profiles from CPP-SA micro-system.

0 200 400 600 8000.0
0.2
0.4
0.6
0.8
1.0
Fra
ctia
l rel
ease
Time(hour)
Fig. 5. The simulated drug release profiles from PLGA micro-system.
X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56 53
4. Structural optimum design for linear release of drug
In controlled drug delivery systems designed for long-term administration, the drug level in the bloodshould remain constant, between the desired maximum and minimum, for an extended period of time. There-fore the ideal drug release is zero order models, or the profile of drug release is linear. The method of structuraloptimum design usually applied in mechanical structure and we try to solve the problem of drug delivery frommicrostructure by this method. To obtain a desired drug release rate, an optimization model is developed. Atwo-level optimization algorithm is proposed.
At the first level, the release time is chosen to be the objective function, and the thickness of the chamber’swall is the design variables. Therefore, the optimization problem can be stated as follows:
min T ¼ jT f � T ej; ð13Þ
s:t: h0 þXk
i¼1
ðhi þ aiÞ 6 5 mm; ð14Þ
40 lm 6 hi 6 120 lm;
where, Tf is the true drug release period and Te is the expected drug release period, hi is the wall thickness ofthe micro-chamber in radius, and ai is the thickness of the chamber along the axial direction.
The optimized parameter can be obtained using the 1-D search model at the first level.At the second level, the release rate is the objective function and the wall thickness of the chambers is the
design variables, and the optimization problem can be stated as follows:
min F i ¼ MiðDtÞ �M eðDtÞ; i ¼ 1; 2; . . . ; ½T =6� þ 1; ð15Þ
s:t: h0 þXk
i¼1
ðhi þ aiÞ 6 5 mm; ð16Þ
40 lm 6 hi 6 120 lm;
where, Mi(Dt) represents the simulation of drug release at the period of time and Me(Dt) represents the aim ofdrug release at the period of time.
The relative difference quotient algorithm is used to obtain the optimized parameters at the second leveloptimization.
The following algorithm was used for design optimization of the micro-chambers used for linear release ofdrug:

54 X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56
Step 1: The initial parameters of the microstructure are chosen;Step 2: The microstructure is represented by nx · ny grid points. Each grid pixel refers to polymer or drug;
each grid pixel has an expected value. When a drug pixel is eroded, an appropriate amount of drugis released spontaneously. The release profile of the microstructure can therefore be obtained andthe original time of the drug release from each micro-chamber also can be obtained;
Step 3: At the first level optimization, if the release characteristics do not satisfy Eq. (13), the wall thick-ness of the micro-chambers is increased (or reduced), and then to Step 2 until the release charac-teristics satisfy Eq. (13) and go to Step 4 for the second level optimization.
Step 4: The chamber’s wall is marked in numbers of 1–28 from outside to inside, and from top right quar-ter in counter-clockwise. The breaking-down time of every chamber cell and the serial drug releaserate can be obtained during every six-hour according to Eq. (8). If it does not satisfy Eq. (15), thethickness of the chamber, whose breaking-down time is closer to the release time, is increased orreduced based on the relative difference quotient algorithm and go to Step 2. If the parameters havenot been satisfying the condition (16), it will be bread out and optimize the next drug release rateuntil i = [T/6] + 1. The Step 3 is spited at the second level optimization.
5. Results and discussion
The initial microstructure is assumed to have seven coaxial loops and each one of them consists of fourchambers. The initial thickness of the sidewalls of the chambers, hi, is assumed to be 40 lm.
The numerically simulated release profile before optimization is showed in Fig. 6. It shows the accumulatedrelease profile and the drug release rate during every six-hour from the beginning of the erosion. Its releaseperiod is about 80 h. Take the RHGM-CSF (North China Pharmaceutical Group Corp.) as the objectiveloaded drug. Its release period is 168–240 h. Since the total period of 180 hours was taken as the desired periodof drug release, the micro-chamber with the initial parameter cannot be used to load this desired amount ofdelivery.
At the first level optimization, when the sidewall thickness was increased to 90 lm, the released period is178 h and it is near the expected period. The accumulated release profile is showed in Fig. 6. It can drawthe results: there is no drug release during sometime and the release period is related to the thickness ofthe chamber’s wall. The drug release rate was found to be pulsed release because wall thickness of all chamberswas assumed to be equal in the simulations. To overcome the disadvantage and obtain linear release, the sec-ond level optimization was carried out.
At the second level optimization, the sidewall thicknesses of micro-chambers wall were taken as the designparameters. Table 1 lists the parameters of microstructures obtained after the second level optimization. Theresults show that the wall thicknesses of chambers in each loop are not equal, especially in loop 1, therefore the
0 50 100 150 2000.0
0.2
0.4
0.6
0.8
1.0
Fra
ctia
l rel
ease
Time(hour)
before optimizaiton first level optimizaiton second level optimizaiton
Fig. 6. The numerically simulated release profile before and after optimization.

Table 1The optimized design parameter of micro-system
Position I II III IV
Thickness (lm) Thickness (lm) Thickness (lm) Thickness (lm)
1 45 75 115 1202 100 105 90 1053 100 95 95 904 110 110 105 1005 90 100 100 1056 85 95 80 807 80 70 80 80
0 50 100 150 2000.0
0.2
0.4
0.6
0.8
1.0
Fra
ctia
l rel
ease
Time(hour)
data1 data2 data3 data4
Fig. 7. The four times simulated drug release profiles after the second level optimization.
X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56 55
wall thicknesses of the first loop chambers are important for the overall drug release rate of the microstructure.The thicknesses at different loops will also be different.
The numerical simulations show that an approximately zero-order drug release can be achieved as shown inFig. 6. However, there are still some burst releases sometimes. This undesired fraction maybe avoided if thenumber of chambers in every loop can be increased. Of course, this may lead to increased number of designparameters.
In addition, the stability of this method is also checking by four times structural optimum and it show asFig. 7. The numerical simulations show that each structural optimum can get an approximately zero-orderdrug release profile. The compare profile can be divided into two phases, the first one is from beginning tothe 100 h, and the second one is from 100 h to the end. In the first phase, each profile of drug release is thesame to the other one and in the second phase each profile is differ to the other one. The reason is that theerosion is a random event and each structural optimum may be obtaining different parameter. But the resultis right to the linear release of the drug from the implantable micro-system.
6. Conclusion
In this study, the mathematical modeling was developed and numerical simulations were conducted to opti-mize the controlled release of the drugs packed in a micro-fabricated drug delivery system based on moldedarrays of CPP-SA and PLGA chambers. It need to optimum the structural for the CPP-SA micro-system anda two-level optimization algorism was developed to simulate the drug delivery from the biodegradable con-trolled-release system. At the first level, the drug release period was chosen to be the objective function basedon the 1-D search model. At second level, the release rate was set as objective function using the relative dif-ference quotient algorithm. The simulation results show that this model can be used as a design optimizationtool for the controlled-release system to obtain desired release characteristics.

56 X. Wang et al. / Simulation Modelling Practice and Theory 15 (2007) 47–56
Acknowledgements
This work was supported by a grant from the National Natural Science Foundation of China (NSFC) (No.50375116) and a grant from the National High Technology Research and Development Program of China(863 Program) (No. 2003AA404170).
References
[1] H. Brem, M.S. Mahaley, et al., Interstitial chemotherapy with drug polymer implants for the treatment of recurrent gliomas, J.Neurosurg. 74 (1991) 441–446.
[2] D.L. Wise, T.D. Fellman, et al., Lactic/Glycolic Acid Polymers, in: G. Gregoridis (Ed.), Drug Carriers in Biology and Medicine,Academic Press, 1979, p. 237.
[3] R.A. Peppas, R. Langer, New challenges in biomaterials, Science 263 (1994) 1715–1720.[4] R. Langer, J.P. Vacanti, Tissue engineering, Science 260 (1993) 920–926.[5] G. Vozzi, C.J. Flaim, F. Bianchi, A. Ahluwalia, S. Bhatia, Microfabricated PLGA scaffolds: a comparative study for application to
tissue engineering, Mater. Sci. Eng. C 760 (2002).[6] S.P. Schwendeman, Recent advances in the stabilization of proteins encapsulated in injectable PLGA delivery systems, Crit. Rev.
Ther. Drug Carrier. Syst. 19 (2002) 73–98.[7] F.V. Burkersroda, L. Schedl, A. Gopferich, Why degradable polymer undergo surface or bulk erosion, Biomaterials (23) (2002) 4221–
4231.[8] A. Gopferich, Polymer Bulk erosion, Mcaromolecules 26 (1993) 4105–4112.[9] A. Gopferich, L. Langer, Modeling of polymer erosion, Macromolecules 26 (1993) 4105–4112.
[10] A. Gopferich, Mechanisms of polymer degradation and erosion, Biomaterials 17 (1996) 103–114.[11] A. Gopferich, Erosion of composite polymer matrices, Biomaterials 18 (5) (1997) 397–403.[12] K. Zygourakis, Discrete simulation and bioerodible controlled release systems, Polym. Prep. ACS 30 (1989) 456–457.[13] K. Zygourakis, Computer-aided design of bioerodible devices with optimal release characteristics: A cellular automata approach,
Biomaterial 17 (1996) 125–135.[14] A. Gopferich, Bioerodible implants with programmable drug release, J. Control. Release 44 (1997) 271–281.[15] Michael C. Georgiadis, Margaritis Kostoglou, On the optimization of drug release from multi-laminated polymer matrix devices, J.
Control. Release 77 (2001) 273–285.[16] Ren Yang, Tianning Chen, Hualing Chen, W. Wang, Microfabrication of biodegradable (PLGA) honeycomb-structures and
potential applications in implantable drug delivery, Sens. Actuat. B: Chemical 106 (2) (2005) 506–511.