Embed Size (px)
Citation preview
ELEC ENG 3BA3:
Structure of Biological Materials
Notes for Lecture #6 Tuesday, September 20, 2011
2
3. BIOMECHANICS
Some areas of biomechanics research and application: – movement and locomotion mechanics – tissue mechanics – orthopaedic prostheses & implants – impact mechanics – neuromuscular control – functional electrical stimulation – cell mechanics and locomotion
3
3.1 Locomotion
Quantifying the mechanics of human locomotion will be helpful in:
– developing mathematical models of biomechanical systems,
– understanding the effects of pathology or injury on locomotion, and
– determining the important properties required for orthopaedic prostheses & implants, functional electrical stimulation, etc. to restore near-normal locomotion
4
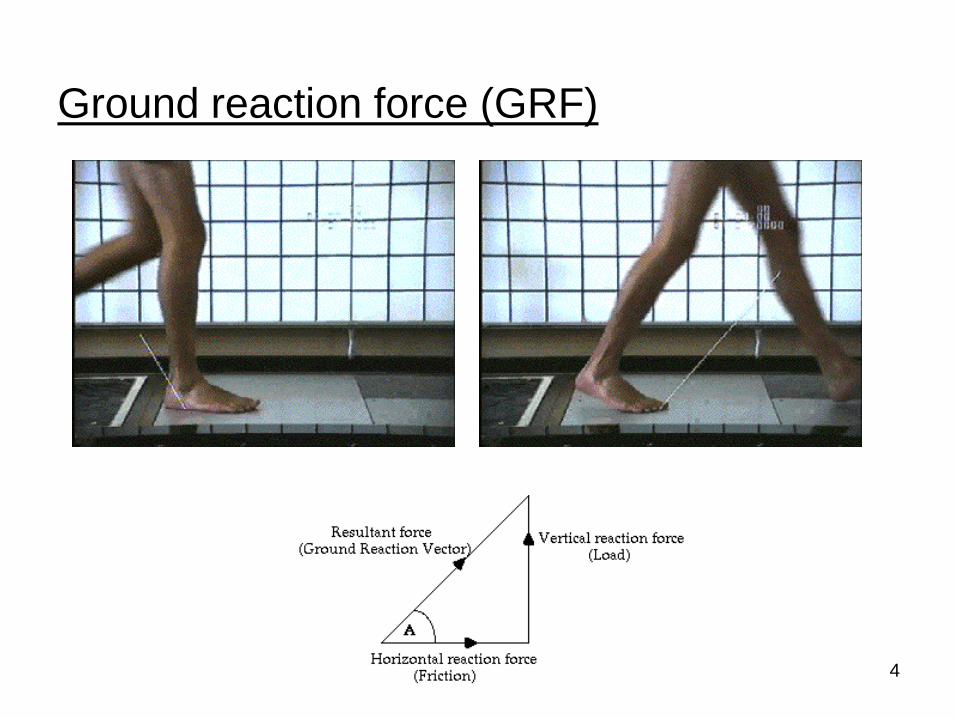
Ground reaction force (GRF)
5
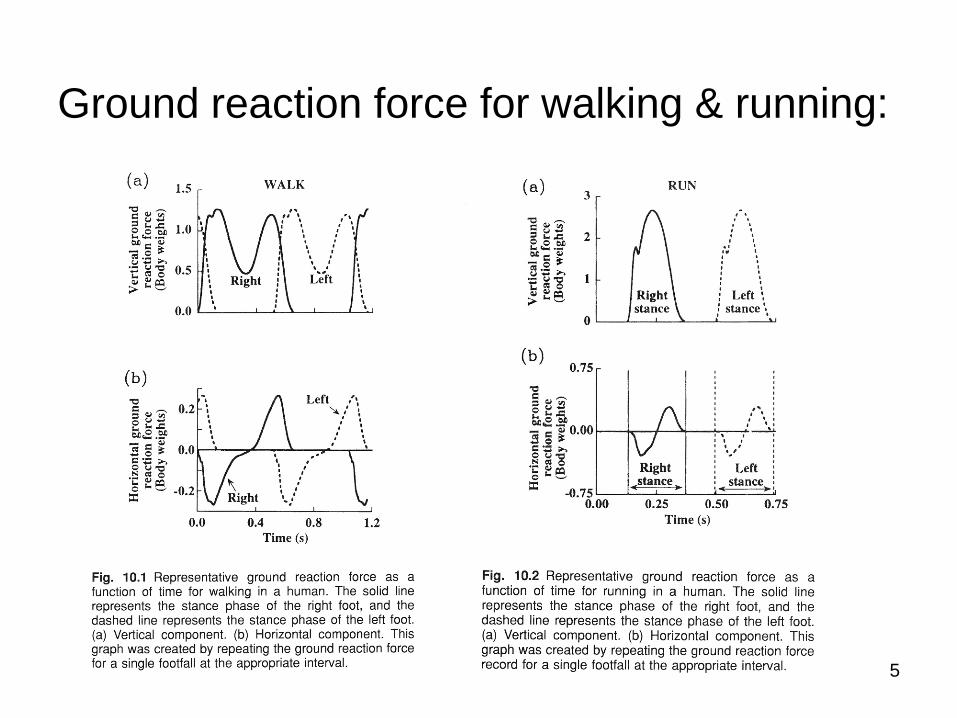
Ground reaction force for walking & running:
6
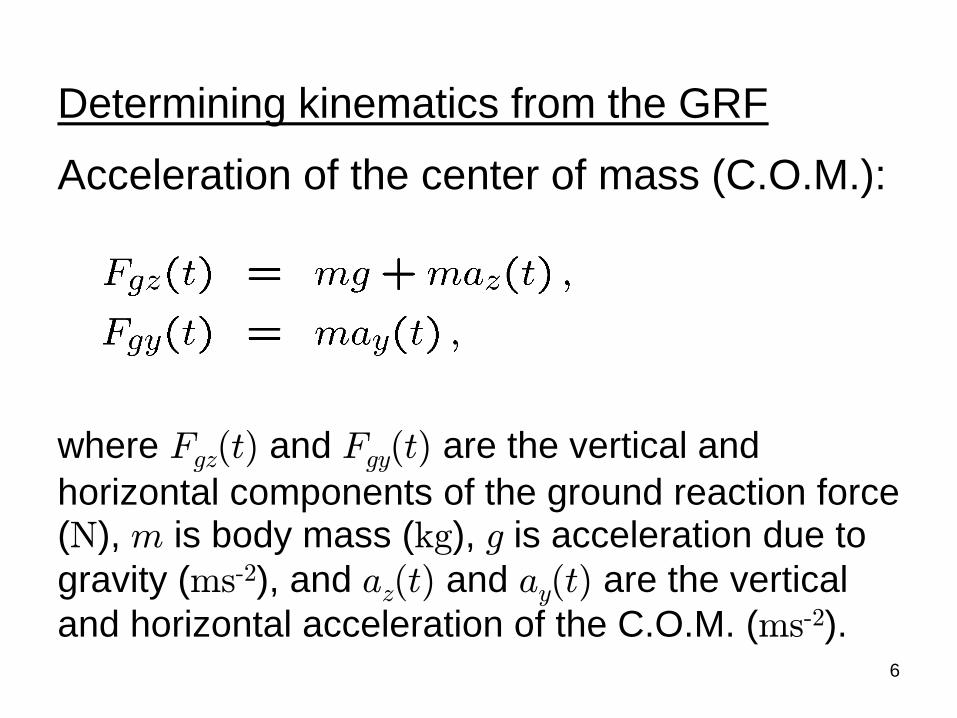
Determining kinematics from the GRF
Acceleration of the center of mass (C.O.M.):
where Fgz(t) and Fgy(t) are the vertical and horizontal components of the ground reaction force (N), m is body mass (kg), g is acceleration due to gravity (ms-2), and az(t) and ay(t) are the vertical and horizontal acceleration of the C.O.M. (ms-2).
7
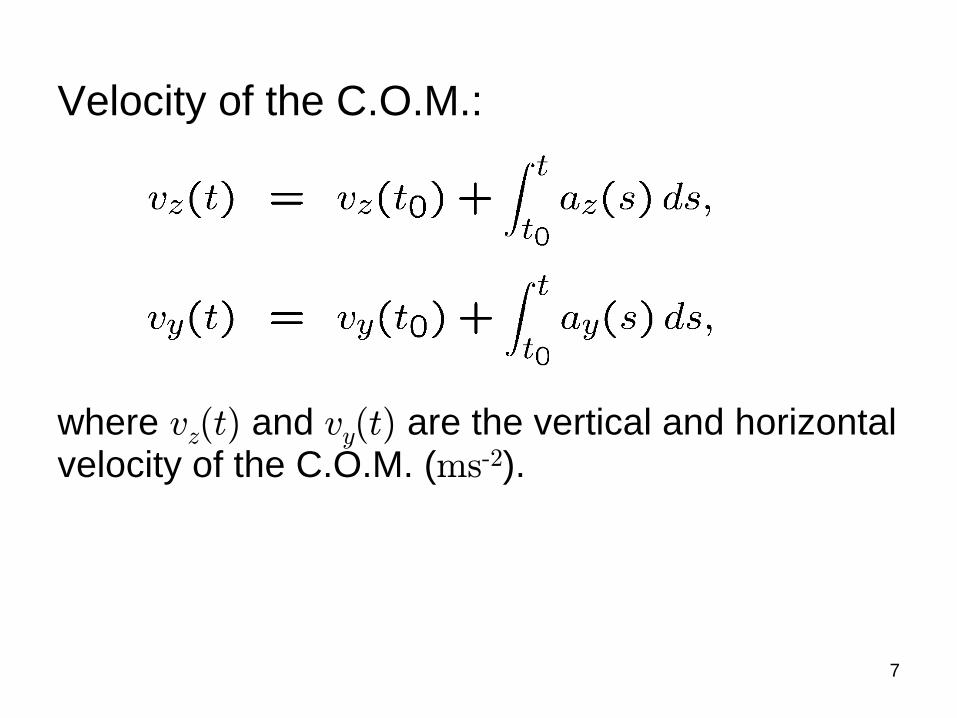
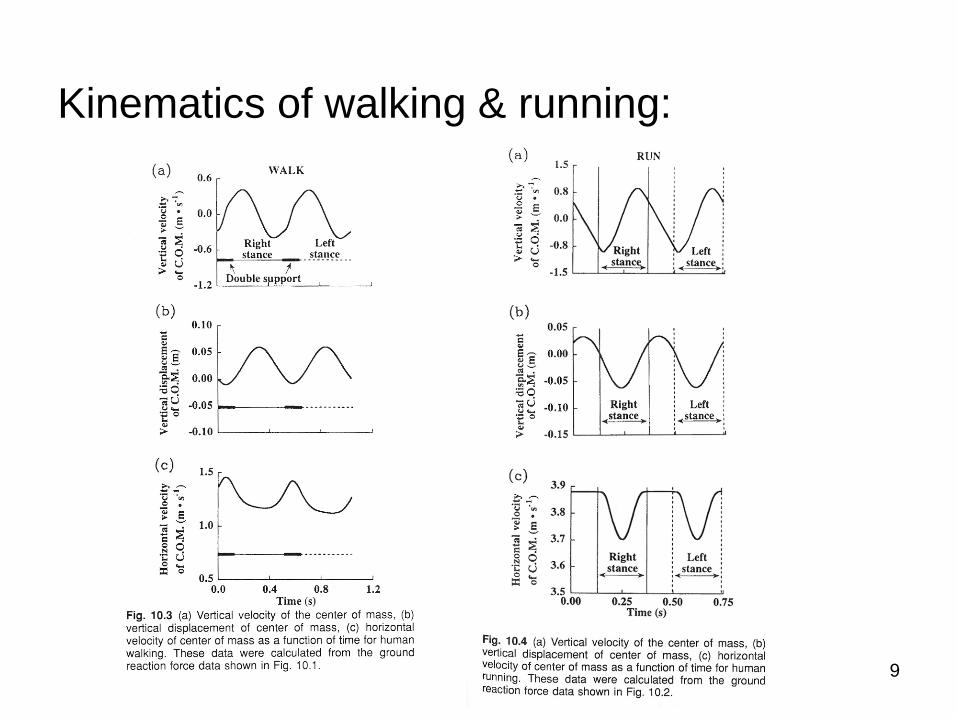
Velocity of the C.O.M.: where vz(t) and vy(t) are the vertical and horizontal velocity of the C.O.M. (ms-2).
8
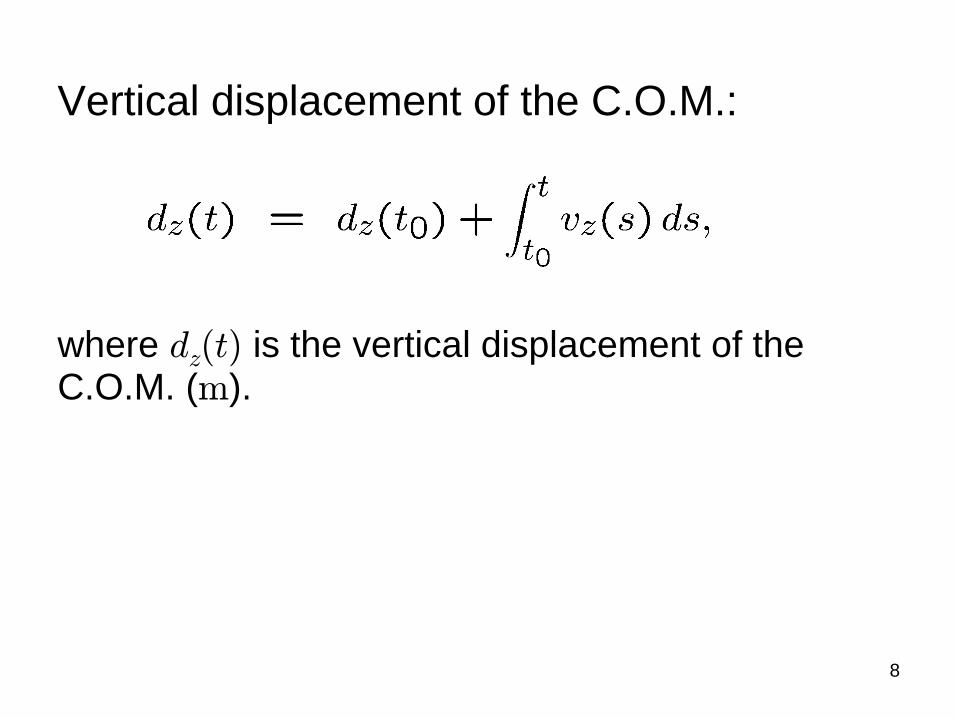
Vertical displacement of the C.O.M.: where dz(t) is the vertical displacement of the C.O.M. (m).
9
Kinematics of walking & running:
10
Total mechanical energy of the C.O.M.: where Ekin(t) is the kinetic energy of the C.O.M. (J):
and Egrav(t) is the potential gravitational energy of the C.O.M. (J):
11
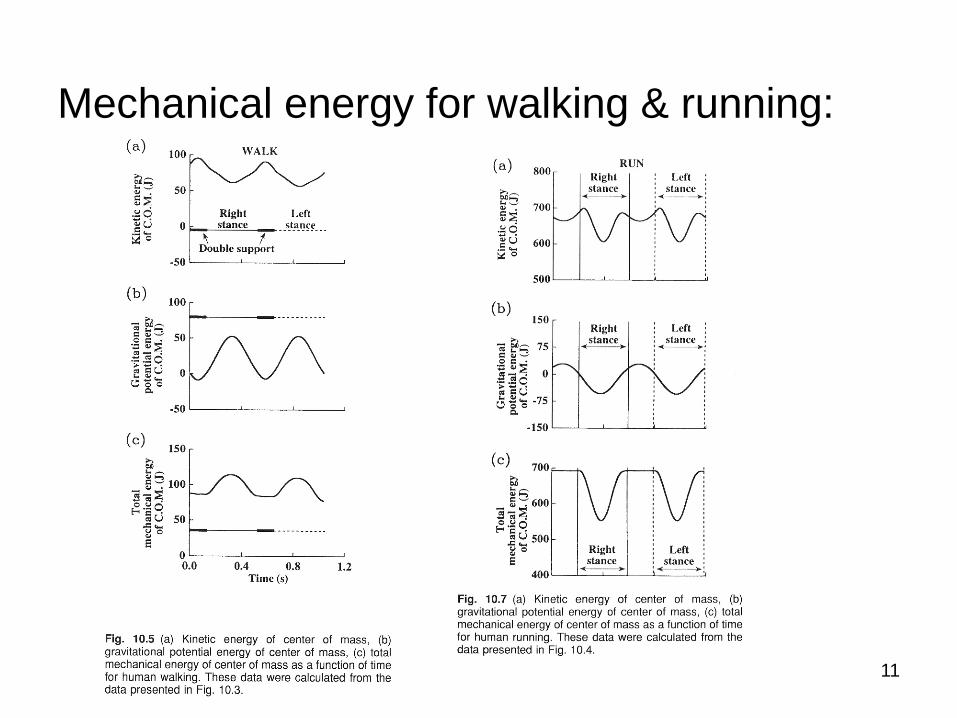
Mechanical energy for walking & running:
12
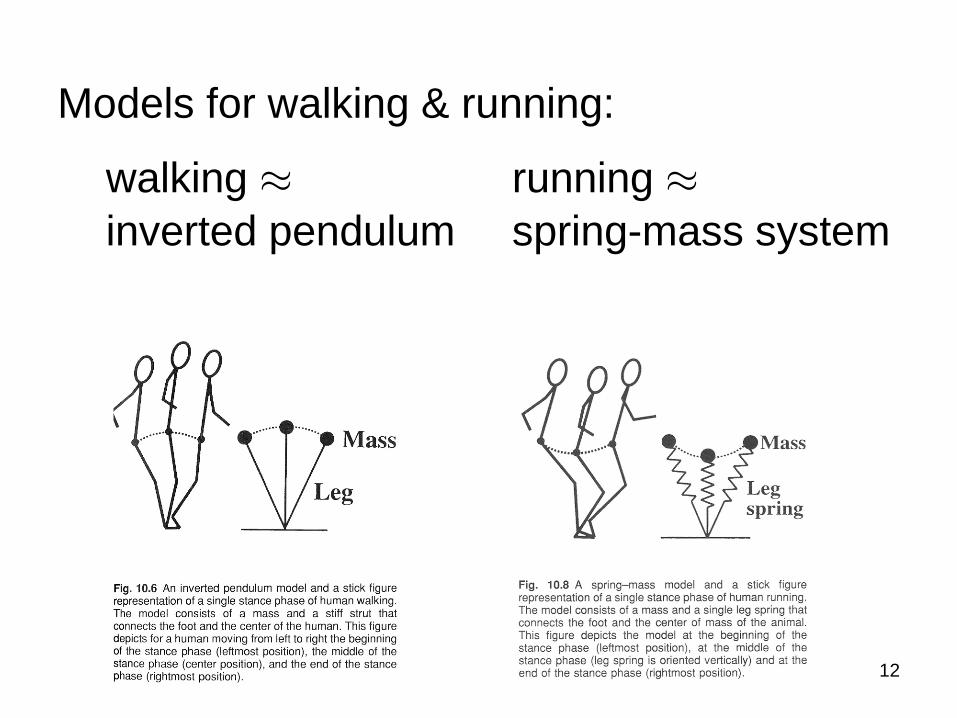
Models for walking & running:
walking ¼ running ¼ inverted pendulum spring-mass system
13
Models for walking & running: walking ¼ kinetic energy ) inverted pendulum gravitational potential energy ) kinetic energy running ¼ kinetic energy & spring-mass system gravitational potential energy ) elastic potential energy ) kinetic energy & gravitational potential energy
14
Implications for orthopaedic prostheses & implants, functional electrical stimulation (FES), etc.
Walking: – optimal walking speed is »1.25 ms-1 for
adults, because the exchange of gravitational potential energy with kinetic energy is most efficient at this speed
– at walking speeds >1.5 ms-1, fluctuations in kinetic energy greater than fluctuations in gravitational potential energy
15
Walking (cont.): – at walking speeds <1.0 ms-1, fluctuations in
kinetic energy less than fluctuations in gravitational potential energy
Consequently, to restore a near-normal walking motion with optimal efficiency, we need to obtain:
– a natural pendular motion, and
– a walking speed of between 1.0 and 1.5 ms-1.
16
Running: – becomes more efficient than walking at
speeds >2.0 ms-1
– is dependent on normal elastic behaviour of the legs
Walking & running also depend on: – force-generating muscle contractions
– limb and joint stability
– neuromuscular control
– vestibular (balance) feedback





























