Embed Size (px)
Citation preview

Expert Systems with Applications 37 (2010) 1608–1619
Contents lists available at ScienceDirect
Expert Systems with Applications
journal homepage: www.elsevier .com/locate /eswa
Stochastic multi-objective models for network design problem q
Anthony Chen a,*, Juyoung Kim b, Seungjae Lee c, Youngchan Kim c
a Department of Civil and Environmental Engineering, Utah State University, Logan, UT 84322-4110, USAb Center for National Transport Database, The Korea Transport Institute, 2311 DaehwaDong, Ilsan-Gu, Goyang City, Republic of Koreac Department of Transportation Engineering, University of Seoul, Dongdaemoon-Ku, Seoul, Republic of Korea
a r t i c l e i n f o
Keywords:User equilibriumTraffic assignmentNetwork designBi-level programStochastic programMulti-objectiveGenetic algorithm
0957-4174/$ - see front matter Published by Elsevierdoi:10.1016/j.eswa.2009.06.048
q The first author was supported by a grant from the(CMS-0134161) from the United States and a visitingUniversity of Seoul, Republic of Korea.
* Corresponding author. Tel.: +1 4357977109; fax:E-mail address: [email protected] (A. Ch
a b s t r a c t
Transportation network design problem (NDP) is inherently multi-objective in nature, because it involvesa number of stakeholders with different needs. In addition, the decision-making process sometimes hasto be made under uncertainty where certain inputs are not known exactly. In this paper, we develop threestochastic multi-objective models for designing transportation network under demand uncertainty.These three stochastic multi-objective NDP models are formulated as the expected value multi-objectiveprogramming (EVMOP) model, chance constrained multi-objective programming (CCMOP) model, anddependent chance multi-objective programming (DCMOP) model in a bi-level programming frameworkusing different criteria to hedge against demand uncertainty. To solve these stochastic multi-objectiveNDP models, we develop a solution approach that explicitly optimizes all objectives under demand uncer-tainty by simultaneously generating a family of optimal solutions known as the Pareto optimal solutionset. Numerical examples are also presented to illustrate the concept of the three stochastic multi-objec-tive NDP models as well as the effectiveness of the solution approach.
Published by Elsevier Ltd.
1. Introduction
Transportation network design problems (NDP) have beenextensively studied by engineers, mathematicians, operations re-search analysts, and planners (see Boyce (1984), Magnanti & Wong(1984), Friesz (1985), Bell & Iida (1997), & Yang & Bell (1998) for areview on the modeling, algorithm development, and applicationson this topic). Most applications of NDP found in the literature havebeen focused on single-objective problems such as minimization oftotal travel cost or maximization social welfare in the capacityenhancement problem (Chen, Kim, Zhou, & Chootinan, 2007; Chen& Yang, 2004; Chootinan, Wong, & Chen, 2005; Davis, 1994; Friesz,Cho, Mehta, Tobin, & Anandalingam, 1992; Meng & Yang, 2002; Su-wansirikul, Friesz, & Tobin, 1987; Xu, Wei, & Wang, 2009), minimi-zation of congestion or maximization of revenue (or profit) in theroad pricing problem (Ferrari, 1995, 2002; Subprasom & Chen,2007; Yang & Bell, 1997; Yang & Huang, 1998; Yang & Lam,1996; Yang, Zhang, & Meng, 2004), and minimization of total delayor maximization of reserve capacity in the signal timing controlproblem (Allsop & Charlesworth, 1977; Cantarella, Improta, & Sfor-za, 1991; Ceylan & Bell, 2004; Chen, Chootinan, & Wong, 2006a;
Ltd.
National Science Foundationprofessor fellowship from the
+1 4357971185.en).
Chiou, 1999; Fisk, 1984; Gao & Song, 2002; Wong & Yang, 1997,1999; Yang & Yagar, 1994, 1995; Yang, Yagar, Iida, & Asakura,1994). Transportation NDP, however, is inherently multi-objectivein nature. Because of being a large scale, transportation NDP is,therefore, confronted with various needs from different stakehold-ers. Basically, there are a number of objective functions for roadinvestment decision-making in transportation NDP. Differentauthorities and road users may have different objectives and con-sidering all objectives may be required in the decision-making pro-cess. These multiple objectives often lead to conflict among them.That is, to increase the value of one objective one may need to re-duce the value attained for one or more of the other objectives.These conflicts are particularly evident in transportation planning.Some examples include minimizing total travel time and maximiz-ing reserve capacity (Yang & Wang, 2002), minimizing total traveltime and maximizing revenue (Yin, 2002), minimizing total traveltime of road users and minimizing infrastructure cost of the gov-ernment (Tzeng & Tsaur, 1997), maximizing expected profit andminimizing risk (variability of profit) of private investors in road-way projects (Chen, Subprasom, & Ji, 2003), or maximizing ex-pected social welfare of the government, maximizing expectedprofit of private investors, and minimizing expected inequity ofroad users in a build-operate-transfer project (Chen & Subprasom,2007). In addition to the need to consider multiple objectives in thedecision-making process, the decision sometimes has to be madeunder uncertainty where certain inputs are not known exactly.One of the primary uncertain inputs is travel demand. In practice,

A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619 1609
it is often assumed to be known exactly in the future. However,there is no guarantee that the travel demand forecast would pre-cisely materialize under uncertainty. This is because travel demandforecast is affected by many factors such as economic growth,land-use pattern, and socioeconomic characteristics. All these fac-tors cannot be measured accurately, but can only be roughly esti-mated. Evaluation of network performance without accountingdemand uncertainty can potentially lead to biased investmentdecisions (Waller, Schofer, & Ziliaskopoulos, 2001). Since the mod-eling of network design problems requires considering multipleobjectives and accounting for travel demand uncertainty, we ex-tend the three stochastic NDP models developed in Chen, Kim,Lee, and Choi (2009) to consider multiple objectives under demanduncertainty. These three stochastic multi-objective NDP models areformulated as the expected value multi-objective programming(EVMOP) model, chance constrained multi-objective programming(CCMOP) model, and dependent chance multi-objective program-ming (DCMOP) model in a bi-level programming framework usingdifferent criteria to address demand uncertainty. To solve thesestochastic multi-objective NDP models in a bi-level mathematicalprogramming framework, we develop a solution approach thatexplicitly optimizes all objectives under demand uncertainty bysimultaneously generating a family of optimal solutions knownas the Pareto optimal solution set (i.e., a set of non-dominatedsolutions).
The remainder of the paper is organized as follows: in the nextsection, we provide the notation and mathematical formulations ofthe three stochastic multi-objective models for the NDP under de-mand uncertainty in a bi-level mathematical programming frame-work. A solution procedure consists of Monte Carlo simulation,traffic assignment algorithm, genetic algorithm, and Pareto filteris developed to solve these stochastic multi-objective NDP modelsin Section 3. In Section 4, some numerical examples are provided toillustrate the concept of the three stochastic multi-objective NDPmodels and also the effectiveness of the solution procedure. Final-ly, some concluding remarks are given in Section 5.
2. Notation and model formulations
This section describes the stochastic multi-objective networkdesign problem for optimal capacity enhancement under demanduncertainty. Notation is provided first for convenience, followedby the general stochastic multi-objective bi-level programmingformulation, the lower-level subprogram, and three stochasticmulti-objective models as the upper-level subprogram.
2.1. Notation
A:
set of links in the network A: set of capacity enhancement links in the network W: set of origin–destination (O–D) pairs Rw: set of paths between O–D pair w 2W f wr : flow on path r 2 Rw between O–D pair w 2Wf:
vector of path flows f ¼ . . . ; f wr ; . . .� �T in the lower-levelsubproblem
va:
link flow on link a 2 A v: vector of link flows v = (. . .,va,. . .)T in the lower-levelsubproblem
ua: capacity enhancement of link a 2 A umaxa :
upper bound of capacity enhancement on link a 2 A u: vector of link capacity enhancements u = (. . .,ua,. . .)T in theupper-level subproblem
ta(va,ua): travel time on link a 2 A, which is a function of link flow va andlink capacity enhancement ua
cwr :
travel time on path r 2 Rw between O–D pair w 2Wpw:
minimum travel time between O–D pair w 2W Qw: random demand between O–D pair w 2W qw realization of QwQ:
vector of random variables Qwq:
vector of realization qwga(ua):
capacity expanding cost for link a 2 A dwar :
1 if path r of O–D pair w uses link a, and 0 otherwise B: a fixed improvement budget aj: confidence level required for the chance constraint jFj :
objective value required to satisfy the chance constraint j atleast aj times in the CCMOP model eF j : target value of objective j in the DCMOP model2.2. Stochastic multi-objective bi-level mathematical program
The general stochastic multi-objective network design problemis generally formulated as a bi-level optimization problem to re-flect the different aims of two decision makers: the network usersand the planner. The network users are free to choose their routessuch that their individual travel costs are minimized, whereas theplanner aims to make the best use of limited resources to optimizea set of network performance measures (e.g., reducing congestion,minimizing environmental impact, maximizing throughputs, etc.),while taking into account users’ route choice behavior. The generalstochastic multi-objective bi-level programming (SMOBLP) formu-lation can be stated as follows:
ðUPÞMinimizeu
F u;vðu;Q Þð Þ ¼
F1 u;vðu;Q Þð ÞF2 u;vðu;Q Þð Þ
..
.
Fm u;vðu;Q Þð Þ
8>>>><>>>>: ð1aÞ
s:t: H u;vðu;Q Þð Þ 6 0; ð1bÞ
where v(u,Q) is implicitly defined by:
ðLPÞMinimizev
f u;vðu;Q Þð Þ ð1cÞ
s:t: h u;vðu;Q Þð Þ 6 0; ð1dÞ
where F is the set of m objective functions and u is the design vectorof the upper-level subprogram (UP), H is the constraint set of UP, f isthe objective function and v(u,Q) is the decision variable vector ofthe lower-level subprogram (LP) as a function of the design vector(u) as well as the random demand vector (Q), and h is the constraintset of LP. The upper-level subprogram describes the leader or plan-ner problem, and the lower-level subprogram represents the fol-lower or user’s behavioral problem.
2.3. The lower-level subprogram
In this paper, we consider the continuous NDP, where linkcapacity enhancements are treated as continuous design variables(u). In the capacity enhancement NDP, the upper-level subprogramdetermines the optimal capacity enhancements (u) in a transporta-tion network by optimizing a set of system-wide objectives underdemand uncertainty (Q), while the lower-level subprogram deter-mines the route choice behavior of network users for a givencapacity enhancement under demand uncertainty (v(u,Q)).
Let Q = (. . .,Qw,. . .)T be the random demand vector defined onthe probability space ðX;H;PrÞ, where X is a set of all outcomesof a random experiment (a non-empty set), H is called a r-algebra,and Pr is a probability measure. For each x 2X,q = Q(x) is a real-ization of the random demand vector Q. In the three stochasticmulti-objective models to be described later, the lower-level sub-program is modeled as a standard user equilibrium (UE) traffic

1610 A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619
assignment problem (Sheffi, 1985). For a given design vector deter-mined by the upper-level subprogram (u) and for each realizationof the random demand vector (q), the lower-level subprogramsolves the following traffic assignment problem.
minv
Xa2A
Z va
0taðx;uaÞdx ð2aÞ
s:t:Xr2Rw
f wr ¼ qw; 8w 2W; ð2bÞ
va ¼Xw2W
Xr2Rw
f wr dw
ar ; 8a 2 A; ð2cÞ
f wr P 0; 8r 2 Rw; w 2W ; ð2dÞ
where (2a) is the objective function for the UE traffic assignmentproblem (i.e., sum of the integrals of the link cost function), (2b)is the flow conservation constraint, (2c) represents the link-pathflow relationship, and (2d) ensures the non-negativity of the pathflows. The optimal solution f� ¼ . . . ; f w
r ; . . .� �T to the above problem
satisfies the following UE conditions:
cwr ðf
�Þ � pwðf�Þ¼ 0 if f w
r > 0P 0 if f w
r ¼ 0
�; 8r 2 Rw; w 2W ; ð3Þ
where cwr ðf
�Þ ¼P
ataðvaÞdwar is the travel time on path r 2 Rw between
O–D pair w 2W, and pwðf�Þ ¼min cwr ðf
�Þ; 8r 2 Rw� �
is the minimumtravel time between O–D pair w 2W. That is, when the travel timeon path r is larger than or equal to the minimum travel time, the flowon that path is zero or the path is not used. When the travel time onpath r is equal to the minimum one, its flow is greater than zero orthe path is used. For simplicity, we adopted this widely used UE traf-fic assignment model as the lower-level subprogram to model users’route choice behavior in this paper. Our proposed multi-objectiveNDP framework can also accommodate other route choice models(e.g., stochastic user equilibrium (SUE) models by Fisk (1980) orDaganzo & Sheffi (1982), extended logit-based SUE models by Prash-ker & Bekhor (2004), generalized user equilibrium model by Mir-chandani & Soroush (1987), and reliability-based user equilibriummodels by Lo, Luo, & Siu (2006) Shao, Lam, & Tam (2006)).
2.4. The upper-level subprogram
In this section, we discuss three stochastic multi-objective mod-els as the upper-level subprogram for designing transportationnetwork under demand uncertainty. These three stochastic mul-ti-objective models are formulated as the expected value multi-objective programming model, chance constrained multi-objectiveprogramming model, and dependent chance multi-objective pro-gramming model using different criteria to hedge against demanduncertainty.
2.4.1. Expected value multi-objective programming modelThe expected value multi-objective programming (EVMOP)
model is one of the most commonly used methods for handling de-mand uncertainty in the NDP (Chen & Yang, 2004; Waller & Ziliask-opoulos, 2001). The main idea is to optimize the expected value ofa set of system-wide objective functions under demand uncer-tainty subject to the budget constraint and the limit constraintson the design variables as follows:
minu½E½F1ðu;vðu;Q ÞÞ�; E½F2ðu;vðu;Q ÞÞ�; . . . ; E½Fmðu;vðu;Q ÞÞ�� ð4aÞ
s:t:Xa2A
gaðuaÞ 6 B; ð4bÞ
0 6 ua 6 umaxa ; 8a 2 A: ð4cÞ
In the EVMOP network design model, the objective function (4a) is tominimize the expected value of m objective functions under demand
uncertainty; (4b) ensures the links selected for capacity enhance-ments do not exceed the available budget; and (4c) sets the lowerand upper bounds of the possible link capacity enhancements.
In the EVMOP model, it only considers the average value of theobjective functions; variability of the objective values is totally ig-nored. Under this model, the planner (network designer) wouldbe indifferent between two capacity enhancement plans that haveequal expected objective values but with different variability in theobjective values. The capacity enhancement plan identified in thismodel can be risky since it may select a plan with higher variabilityin the objective values. Such a plan is sub-optimal for the plannerwho is concerned with the reliability of the performance measures.
2.4.2. Chance constrained multi-objective programming modelThe chance constrained model, originally developed by Charnes
and Cooper (1959), models the stochastic decision systems withthe assumption that the constraints will hold at least a times,where a is the confidence level provided as an appropriate safetymargin by the decision maker. This model focuses on the system’sability to meet the chance constraint (risk measure) with certainreliability under uncertainty. Charnes and Cooper (1959) suggestedthree different types of objective functions: (a) a function that opti-mizes the expected value of the objective function (the E model),(b) a function that minimizes the variance of the objective function(the V model), and (c) a function that maximizes the probability ofsatisfying an aspiration level of the objective function (the Pmodel). In the original chance constrained model, it requires theusers to specify both the threshold value and the confidence level.However, it is sometimes difficult to determine the appropriatethreshold value in advance. A variant of the chance constrainedmodel proposed by Liu (2002) avoids the need to pre-specify thethreshold value by simultaneously determining the minimumthreshold value requires to satisfy each chance constraint at a con-fidence level a. A single-objective version of the chance con-strained model was developed by Chen et al. (2007) to solve thealpha reliable NDP model. This model can also be interpreted as aValue-at-Risk (VaR) measure to account for the planner risk prefer-ences through using a confidence level of a on the system-wideobjective function. In this paper, we consider the chance con-strained multi-objective programming (CCMOP) model for NDP asfollows:
Minu
F1; F2; . . . ; Fm� �
ð5aÞ
s:t: Pr F u;vðu;Q Þð Þ 6 Fj� �
P aj; j ¼ 1;2: . . . ;m;
Eqs: ð4bÞ and ð4cÞ ð5bÞ
where aj is the confidence level provided by the planner (or decisionmaker) as an appropriate safety margin to control risk of objectivej; Fj is the objective value required to satisfy the correspondingchance constraint j with probability aj. The objective function (5a)is to minimize a vector of Fj subject to the chance constraint (5b)that guarantees the probability of each objective value less than Fj
is greater than or equal to the predefined confidence level aj forj = 1, 2, . . . ,m. The budgetary constraint (4b) and the limit con-straints (4c) on the set of link capacity enhancements are requiredto obtain meaningful solutions. It is worthwhile to emphasize thatFj is a variable in the modified chance constrained model. The plan-ner only needs to specify a confidence level aj for each objective j. Amore risk averse planner can specify a higher aj value to control therisk of objective j.
2.4.3. Dependent chance multi-objective programming modelThe dependent chance model, first introduced by Liu (1997) and
later extended to dependent chance multi-objective programming(DCMOP) model (Liu, 2002), is to maximize the chance function ofsome events in an uncertain environment. In NDP, the planner

A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619 1611
specifies a set of goals to be attained (i.e., the congestion level, thetarget level-of-service, the required revenue, etc.) and the underly-ing philosophy of the DCMOP model is to select the optimal designwith maximal chance to meet the specified objectives.
maxu
Pr F1 u;vðu;Q Þð Þ 6 eF 1
;Pr F2 u;vðu;Q Þð Þ 6 eF 2
; . . . ;
hPr Fm u;vðu;Q Þð Þ 6 eF m
ið6Þ
s:t: Eqs: ð4bÞ and ð4cÞ;
where eF j is the target value of objective j given by the planner. Theobjective function (6) is to determine the capacity enhancements(i.e., design variables) such that it will maximize the probabilityof each objective value to be less than eF j (a predetermined thresh-old value) for j = 1, 2, . . . ,m. The constraints are the same as the EV-MOP model (i.e., budgetary constraint and limit constraints on thecapacity enhancement links).
3. Simulation-based multi-objective genetic algorithmprocedure
Solving bi-level mathematical programs with multiple objectivesunder uncertainty is generally a very difficult task. The complexitiesinvolve addressing three issues: (1) how to compute the stochasticfunctions, (2) how to solve the bi-level mathematical program,and (3) how to simultaneously optimize all objectives by solvingfor a set of non-dominated (ND) solutions. Evolutionary algorithms,particularly genetic algorithm (GA), have shown to be effective insolving this type of complex problems. Because GA works with apopulation of solutions as opposed to a single solution in the tradi-tional optimization techniques, it has the ability to find multiple op-tima within a single run, which makes it unique for explicitly solvingmulti-objective optimization problems that require generating a setof ND solutions (Coello Coello, Van Velhhuizen, & Lamont, 2002). Inthis section, we present a simulation-based multi-objective geneticalgorithm (SMOGA) procedure that integrates stochastic simulation,a traffic assignment algorithm, a distance-based method, and a ge-netic algorithm to tackle the different issues involved in solvingthe capacity enhancement network design problem with multipleobjectives under demand uncertainty. Stochastic simulation is usedto simulate the uncertainty of traffic demands based on a predefinedprobability distribution. Bi-level mathematical programs are gener-ally difficult to solve because evaluation of the upper-level objectivefunctions requires solving the lower-level subprogram. We use apath-based gradient projection algorithm for solving the lower-levelsubprogram. For the upper-level subprogram, we employ GA to ob-tain a population of solutions that can be used to generate a set of NDsolutions for the multi-objective optimization problem. To retainthe ND solutions from one generation to the next, we use the dis-tance-based method (Osyczka & Kundu, 1995) as a Pareto filter tosort out the solutions that go into an approximate Pareto solutionset. This solution procedure has been successfully used to solvethe mean-variance models of the build-operate-transfer (BOT) net-work design problem (Chen, Subprasom, & Ji, 2006b). In the follow-ing sections, we describe the details of stochastic simulation, trafficassignment algorithm, distance-based method, and geneticalgorithm.
3.1. Computing stochastic functions
Stochastic (or Monte Carlo) simulation is an important tool forperforming sampling experiments on the models of stochastic sys-tems (Liu, 2002). It is based on sampling random variables fromprobability distributions to compute the stochastic functions. Inorder to compute the stochastic functions used in the stochasticmulti-objective models for NDP, we assume that a set of designs
(i.e., capacity enhancements) has been determined by the GA pro-cedure to be described later. The three stochastic functions to becomputed are (i) expected value function, (ii) chance constrainedfunction, and (ii) probability function.
(i) Expected value functionThe expected value model is to minimize E Fj u;ð
�vðu;Q ÞÞ�; j ¼ 1;2: . . . ;m. For each objective function j, com-pute U1 : ðu;vÞ ! E Fj u;vðu;Q Þð Þ
� �as follows:
Step 1. Set U1(u,v)=0.Step 2. Generate x from X according to the probability
measure Pr.Step 3. For each Q(x), solve the lower-level subproblem
(2a)–(2d) and calculate Fj u;v u;Q ðxÞð Þð Þ.Step 4. U1ðu;vÞ U1ðu;vÞ þ Fj u;v u;Q ðxÞð Þð Þ.Step 5. Repeat the second to fourth steps for N times, where
N is a sufficiently large number.Step 6. Return U1(u,v)/N
(ii) Chance constrained functionThe chance constrained model is to minimize
FjjPr Fj u;vðu;Q Þð Þ 6 Fj� �
P aj� �
; j ¼ 1;2; . . . ;m. For eachobjective function j, compute U2 : ðu;vÞ ! FjjPr Fj u;ð
��vðu;Q ÞÞ 6 FjÞP ajg as follows:Step 1. Generate x1,x2, . . . ,xN from X according to the
probability measure Pr, where N is a sufficientlylarge number.
Step 2. For each Q(xk), solve the lower-level subproblem(2a)–(2d) and denote the objective function byFk
j u;v u;Q ðxÞð Þð Þ for k = 1, 2, . . . ,N.Step 3. Set N0 as the integer part of aN.Step 4. Return the N0th least element in F1
j u;v u;ððn
Q ðxÞÞÞ; F2j u;v u;Q ðxÞð Þð Þ; . . . ; FN
j u;v u;Q ðxÞð Þð Þg.
(iii) Probability functionThe dependent chance model is to maximize PrðFjðu;vðu;Q ÞÞ 6 eF jÞ; j ¼ 1;2: . . . ;m. For each objective function j,compute U3 : ðu;vÞ ! PrðFjðu;vðu;Q ÞÞ 6
� eF jÞg as follows:Step 1. Set N0 = 0.Step 2. Generate x from X according to the probability
measure Pr.Step 3. For each Q ðxÞ, solve the lower-level subproblem
(2a)–(2d) and calculate Fj u;v u;Q ðxÞð Þð Þ.Step 4. If Fj u;v u;Q ðxÞð Þð Þ 6 eF j, then N0 N0 + 1.Step 5. Repeat the second to fourth steps for N times, where
N is a sufficiently large number.Step 6. Return N0/N.
3.2. Computing network equilibrium solutions
Bi-level mathematical programs are generally difficult tosolve because evaluation of the upper-level objective function re-quires solving the lower-level subprogram. For each realizationof O–D demands q = Q(x) generated in the Monte Carlo simula-tion, we use the path-based gradient projection (GP) algorithmto solve the lower-level subprogram (2a)–(2d). It has beenshown that the path-based GP algorithm outperforms the link-based Frank–Wolfe algorithm and the disaggregate simplicialalgorithm (Chen, Lee, & Jayakrishnan, 2002; Jayakrishnan, Tsai,Prashker, & Rajadhyaksha, 1994). The algorithmic steps are sum-marized as follows.
Initialization: Generate the first path for each O–D pair at free-flow travel time and perform an all-or-nothing (AON) assignment.
1. Set va(0) = 0, ta = ta[va(0)], "a, and Rw = £, "w 2W.2. Set iteration counter ) n ¼ 1.

1612 A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619
3. Solve the shortest path problem ) �rwðnÞ;Rw ¼�rwðnÞ [ Rw; 8w 2W .
4. Perform AON assignment ) f w�rwðnÞðnÞ ¼ qw; 8w 2W .
5. Assign path flows to links ) vaðnÞ ¼P
w2W
Pr2Rw
f wr ðnÞd
war ;
8a 2 A.GP Solver: Generate paths based on current link travel times,augment the set of generated paths, and solve the basic flowupdate equations.
6. Increment iteration counter ) n ¼ nþ; 1.7. Update link travel time ) ta(n) = ta[va(n � 1)], "a 2 A.8. Solve shortest path problem ) �rwðnÞ; 8w 2W .9. Determine whether �rwðnÞ exists in the path set Rw or not=>
If �rwðnÞ R Rw, then Rw ¼ �rwðnÞ [ Rw; 8w 2W .Otherwise, tag the shortest path among the paths in Rw as�rwðnÞ.
10. Compute first and second derivative costs ) cwr ðnÞ; cw
�rwðnÞ,and sw
r ðnÞ.11. Update non-shortest path flows )
1 Forevaluat
f wr ðnþ 1Þ ¼max f w
r ðnÞ � aðnÞ swr ðnÞ
� ��1 cwr ðnÞ � cw
�rwðnÞ
h i;0
n o;
8r – �rwðnÞ; w 2W:
12. If f wr ðnþ 1Þ ¼ 0, then drop path r ) Rw = Rwnr.
13. Update shortest path flow )
f w�rwðnÞðnþ 1Þ ¼ qw �
Xr2Rw
r – �rwðnÞ
f wr ðnþ 1Þ; 8w 2W :
14. Update link flows )
vaðnþ 1Þ ¼Xw2W
Xr2Rw
f wr ðnþ 1Þdw
ar; 8a 2 A:
15. Determine maximum path length (travel time) deviation ofall O–D pairs )
E ¼maxw
Xr2Rw
r – �rwðnÞ
f wr ðnÞqw
cwr ðnÞ � cw
�rwðnÞ
cw�rwðnÞ
!:
16. Check convergence ) If E 6 e, then stop. Otherwise, go to 6.
For a detailed description of the path-based GP algorithm,please refer to Chen et al. (2002).
3.3. Evaluating non-dominated solutions
To evaluate the ND solutions, we adopt the distance-basedmethod proposed by Osyczka and Kundu (1995). Its main idea isto evolve the genetic search toward the ideal Pareto solutions inwhich all individual objectives are simultaneously achieved atthe highest possible level. In practice, such a solution is usually un-known; therefore, an alternative benchmark, which is the currentset of ND solutions, is considered. The solutions are improved bybeing distanced away from the existing set of ND solutions. Its rel-ative distance (dk) to the existing ND solutions (uk) defines the fit-ness (or objective value1) of new solution (u) as follows:
dk ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiXm
j¼1
FjðukÞ � FjðuÞFjðukÞ
� 2vuut ð7Þ
The distance-based method can be incorporated into GA by modify-ing the fitness evaluation using Eq. (7). There are two sets of solu-tions involved: population set and non-dominated set. Thepopulation set is used to perform a genetic search (i.e., GA opera-
simplicity, we denote FjðuÞ ¼ Fj u;vðu;Q Þð Þ; j ¼ 1;2: . . . ;m, in the fitnession.
tors) while the ND set is the solutions of problem. The newly gener-ated solution can be classified either as superior (Type I), non-dominated (Type II), or inferior (Type III) solutions. They will beadded to the ND set if they are superior or ND solutions. The inferiorsolutions will not be introduced into the ND set since it is worsethan the existing ones. In the case that some ND solutions are dom-inated by a newly generated solution, they will be discarded fromthe ND set. The solutions distancing further away from the existingND solutions will receive a higher chance to produce a new set ofsolutions. The fitness evaluation according to the distance-basedmethod is summarized as follows:
Step 1. If there exist solutions in the ND set, go to Step 2. Other-wise add the pth solution into the set. Arbitrarily assignthe fitness value to the pth solution (vp = Pmax). Set thenumber of ND solutions, k = 1.
Step 2. Determine the minimum distance (dmin) and correspond-ing ND solution (k) by Eq. (8a), where k is the kth NDsolution with the minimum distance (dmin).ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiv8 9
dmin ¼MinkXm
j¼1
fjðukÞ � fjðuqÞfjðukÞ
� 2uut<: =; ð8aÞ
Step 3. Determine the type of solution. If the pth solution is TypeI, add this solution into the ND set and removes all dom-inated solutions (r solutions). Set k = k � r + 1, computethe fitness of new ND solution (pk) as given below andgo to Step 4.
pk ¼ Pmax þ dmin ð8bÞ
If the pth solution is Type II, add this solution into the NDset. Set k = k + 1, compute the fitness of new ND solution(pk) using Eq. (8c), and go to Step 4.
pk ¼ p‘ þ dmin ð8cÞ
If the pth solution is Type III, compute the fitness of solu-tion using Eq. (8d) and go to Step 5.
vq ¼Max 0;p‘ � dminf g ð8dÞ
Step 4. Compute the fitness of the pth solution using Eq. (8e).Update the fitness of ND set according to Eq. (8f).
vq ¼ pk ð8eÞPmax ¼Max Pmax; pkf g ð8fÞ
Step 5. If p equals the population size (P), set the fitness of all NDsolutions to Pmax, and return to genetic search, otherwiseconsider the next solution (p + 1).
3.4. Computing optimal designs
Although the upper-and the lower-level subprograms are indi-vidually convex mathematical programs, their combination as abi-level mathematical program is usually non-convex, which is dif-ficult to solve using standard optimization methods. Many heuris-tic algorithms have been developed to solve the bi-level NDP. Asummary survey is provided by Yang and Bell (1998). To tacklethe non-convexity issue in NDP, we employ GA as a meta-heuristictechnique due to its flexibility in solving difficult problems that donot possess nice mathematical properties (e.g., continuity, differ-entiability, uni-modal, and convexity). The main mechanism driv-ing the optimization process is a simple search procedureinspired by natural selection based on the principle of evolution-survival of the fittest. Typical GA implementation involves codingthe design variables in the upper-level subprogram as chromo-somes, evaluating the fitness of the chromosomes, and performingthe basic GA operators (i.e., reproduction, crossover, and mutation)

A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619 1613
to evolve the chromosomes to obtain better solutions. In this sec-tion, a brief description of the GA implementation is provided. De-tailed descriptions of the GA can be found in Goldberg (1989) andGen and Cheng (2000).
3.4.1. Chromosome representationIn general, the design variables can be coded as binary, integer,
or real representation (Rothlauf, 2000). Since the design variablesin the upper-level subprogram are real, we adopt the real represen-tation to represent the design variables ua with a length equal tothe number of capacity enhancement links in the network j�Aj.The value of each gene represents the link capacity expansion,which is limited by the upper and lower limits of constraint (4c).
3.4.2. Reproduction operatorReproduction is a selection process that selects chromosomes
from a population pool based on their fitness for mating. The fit-ness of the chromosome implies the number of times eachchromosome will be in the mating pool. The most commonly usedselection schemes are roulette wheel and tournament selection. Inthis study, the roulette wheel selection scheme is adopted. Afterevaluating the fitness of all chromosomes in the population pool,they are ranked in an ascending order based on the fitness values.Chromosomes with the highest chance will occupy a largerportion on the roulette wheel. The selection process is based ona random number drawn between 0 and 1, and the solution asso-ciated with the intercepted portion of the wheel will enter themating pool.
3.4.3. Crossover operatorCrossover is a means of exchanging genetic materials between
two parent chromosomes such that two new offspring chromo-somes, containing genetic materials from the parent chromosomes,can be generated. Crossover occurs with a constant probability,which implicitly indicates the expected number of chromosomesin the mating pool undergoing crossover. There are many crossoverschemes in the literature. As the chromosome in NDP is codedusing a real-code representation, the arithmetic crossover is used.This method is similar to the linear combination of two solutionvectors with a random fraction.
3.4.4. Mutation operatorMutation alters the value of genetic units for the purpose of
introducing new genetic structures to the new offspring. All newoffspring are subjected to the mutation operator with a predefinedmutation rate. Mutation allows the GA to explore new regions ofthe solution space and helps to prevent convergence to a sub-opti-mal solution.
3.5. Simulation-based multi-objective genetic algorithm procedure
In this section, we summarize the major steps of the simula-tion-based multi-objective genetic algorithm (SMOGA) procedurein Fig. 1 for solving the stochastic multi-objective NDP models dis-cussed in Section 2.
Step 0. Define GA parameters: mutation probability (Pm), cross-over probability (Pc), population size (P), maximum num-ber of generations (Nm), and maximum number of samplesizes (Snsp). Initialize N (counter for the number of genera-tions) and a set of initial solutions of size P. Initialize p(counter for the number of solutions).
Step 1. Evaluate the objective function of solution p with the max-imum number of samples. Collect statistics (e.g., distribu-tion of total travel time, construction cost).
Step 2. Evaluate the fitness of all chromosomes in the populationpool using the traffic assignment and stochastic simula-tion procedures described above.
Step 3. Use the distance-based method to solve the multi-objec-tive optimization problem and update the ND (or Pareto)solution set. Increment p = p + 1. Repeat Step 2 until p > P(population size).
Step 4. Improve all solutions via GA operators: reproduction,crossover, and mutation. Increment N = N + 1. Repeat Step2 and Step 3 until N > Nm.
Step 5. Report the ND solution set.
4. Numerical examples
4.1. Problem description
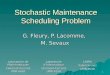
In this section, we illustrate the stochastic multi-objective NDPmodels using three examples. The network used for the threeexamples is the Sioux Falls network depicted in Fig. 2. The networkconsists of 24 nodes, 76 links and 528 O–D pairs with positive de-mand. The link characteristics, capacity expansion cost functions,and O–D demands are available in Suwansirikul et al. (1987). Therandom O–D demands are generated according to the triangulardistribution (a,b,c), where a and b are the lower and upper limitsand c is the mode. The mode c is set equal to the demand specifiedin Suwansirikul et al. (1987), while a and b are set equal to ±50% ofc for all O–D pairs. Alternatively, these random O–D demands canbe generated by a multivariate random variate generation proce-dure (e.g., Chang, Tung, & Yang, 1994), which is capable of generat-ing multivariate, non-normal, correlated random variables. Tenlinks are selected for capacity enhancement, i.e., links 16, 17, 19,20, 25, 26, 29, 39, 48 and 74. In the three examples, we considertwo commonly used objective functions used in NDP, which is tominimize total travel time and total construction cost (Suwansiri-kul et al., 1987; Tzeng & Tsaur, 1997).
F1ðvðQ Þ;uÞ ¼Xa2A
ta vaðu;Q Þ;uað Þvaðu;Q Þ ð9Þ
F2ðuÞ ¼Xa2�A
ga uað Þ ð10Þ
The first objective is a random variable since both ta ua;vaðu;Q Þð Þand va(u,Q) depend on the random demand vector (Q), whereasthe second objective is a deterministic variable since the total con-struction cost function only depends on the optimal capacityenhancements (u). However, these two objectives are inter-relatedand known to be conflicting (i.e., reducing total travel time will in-crease total construction cost and vice versa).
In this study, the following parameters are used:
� Population size is 30 chromosomes� The maximum number of generations is 300� The maximum number of samples is 1000� Probability of crossover is 0.5� Probability of mutation is 0.1� The lower and upper bounds for capacity enhancement are [0
veh/h, original link capacity veh/h]
4.2. Criteria for evaluating non-dominated solutions
Three measures are used to quantify how ‘good’ the ND solutionset represents the Pareto frontier. These three measures are: (1)number of ND solutions, (2) diversity, and (3) convergence to thePareto frontier. However, note that other appropriate measuresmay also be used (see Coello Coello et al., 2002 for other measures).The first measure can be obtained by simply counting the number

1
8
4 5 63
2
15 19
17
18
7
12 11 10 16
9
20
23 22
14
13 24 21
3
1
2
6
8
9
11
5
15
1231 32
21
16 19
17
2018 54
55
50
48
2951 49 52
58
24
27
32
33
36
7 35
4034
41
44
57
45
72
70
46 67
69 65
25
28 43
53
59 61
56 60
66 62
6863
7673
30
24 17
647539
74
37 38
26
4 14
22 47
10 31
Links proposed for capacity enhancement
Fig. 2. Sioux Falls network.
·Generate initial solution·Define population size, P·Define number of generations, Nm·Define maximum number of samplesizes, Snsp
N = 1
p = 1
S = 1
Simulationmodule
S > Snsp
Distance-based module
P > p
N > Nm
GA module ·Reproduction ·Crossover ·Mutation
Report the nondominatedsolutions
N = N+1
p = p+1
S = S+1
No
No
No
Yes
Yes
Yes
Trafficassignment
module
Step 1
Step 2
Step 3
Step 4
Step 5
Fig. 1. Simulation-based multi-objective genetic algorithm procedure.
1614 A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619
of ND solutions in the set. For the second measure, we select thespacing metric (S) to measure the uniformity of solutions (Tan,Khor, & Lee, 2005):
S ¼ 1m
Xm
l¼1
d0l ��d0
2" #1=2,
�d0; ð11Þ
where m is the number of ND solutions, d0l is the Euclidean distancebetween each ND solution and its nearest ND solution, and�d0 ¼ 1
m
Pml¼1d0i is the average Euclidean distance of all ND solutions.
A value of zero indicates that all members in the ND solution setare equidistantly spaced. For the third measure, we use the twoset coverage (CS) to measure convergence to the Pareto frontier(Coello Coello et al., 2002):
CSðX1;X2Þ ¼jfu2 2 X2;9u1 2 X � 1 : u1 � u2gj
jX � 2j ; ð12Þ
where X1 is the ND solutions of set 1; X2 is the ND solutions of set 2;u1 is a member in the ND solution set 1; u2 is a member in the NDsolution set 2. u1 � u2 means u1 dominates u2 if f(u1) < f(u2), andu1 � u2 means u1 weakly dominates u2 if f(u1) 6 f(u2). If all pointsin X1 dominate or are equal to all points in X2, then by definitionCS = 1; otherwise, CS = 0 implies the opposite.
4.3. Example 1
Example 1 uses the EVMOP model to determine the optimal linkcapacity enhancements under demand uncertainty. The upper-le-vel subprogram can be formulated as follows:
minu
E F1 u;vðu;Q Þð Þ½ �; F2ðuÞ½ �; ð13aÞ
s:t: 0 6 ua 6 umaxa ; 8a 2 A: ð13bÞ
The objective function (13a) is to minimize the expected value oftotal travel time and the total construction cost subject to the limitsof the available capacity for enhancement on the set of capacityenhancement links in the network (13b).
Fig. 3 and Table 1 examine the effect of maximum number ofgenerations on the Pareto frontier and the quality of ND solutions
using a population size of 30, a crossover rate of 0.5 and a mutationrate of 0.1. Fig. 3 graphically depicts the effect of maximum num-ber of generations on the Pareto frontier. It appears that the NDsolutions obtained at 200 and 300 generations have better conver-

5500
5700
5900
6100
6300
6500
6700
6900
7100
7300
7500
0 4000 8000 12000 16000 20000
Construction Cost
Expe
cted
Val
ue o
f TTT
Iter 50Iter 100Iter 200Iter 300
Fig. 3. Pareto frontier of the EVMOP model.
A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619 1615
gence in the objective space (i.e., well converged and well distrib-uted) than those obtained at 50 and 100 generations. For compar-ison purpose, we use 200 generations as the base case. Table 1provides the numerical details of the three measures described inSection 4.2. The percentage appeared in the spacing metric columnindicates a percentage change of spacing metric compared with thebase case. The two set coverage is computed by comparing the NDsolution set of each maximum number of generations with thebase case and vice versa (i.e., CS(X1,X2) and CS(X2,X1)). X1 denotesthe ND solution set of the base case and X2 denotes the ND solutionset of each maximum number of generations. The number of NDsolutions generally increases as the number of generations in-creases. The percentage change of the spacing metric deterioratessignificantly when the maximum number of generations is lessthan 200 (+24.8% for 50 generations and +15.7% for 100 genera-tions). It is only 2.2% inferior when the maximum number of gen-erations increases to 300. In terms of the two set coverage indices,it is clear that the ND solutions obtained at 50 and 100 generationsare dominated by the base case. However, the ND solutions ob-tained at 300 generations are only slightly better than those inthe base case. These results seem to indicate that 200 generationsis sufficient to obtain good ND solutions. To strike a balance be-tween quality of ND solutions and computational requirements,we adopt 200 as the maximum number of generations to furtherexamine the effect of population size, crossover rate, and mutationrate on the quality of ND solutions. Table 2 presents the results ofthe three measures by examining 10 combinations of populationsize (20 and 30), crossover rate (Pc = 0.3 and 0.5) and mutation rate(Pm = 0.1, 0.2, and 0.3). For comparison purpose, we use 30 for pop-ulation size and 0.5 and 0.1 for crossover and mutation rates as thebase case. It is found that the number of ND solutions is lower for asmaller population size. However, the percentage error of the spac-
Table 1Effect of maximum number of generations on the quality of ND solutions for the EVMOP m
Maximum number of generations Number of ND solutions
200 15750 60100 93300 185
ing metric among the 10 combinations does not exceed ±3%. Thevalues of CS(X1,X2) and CS(X2,X1) are nearly equal (i.e., 0.5:0.5),implying that the ND solutions in the two sets are of similar qual-ity. From these three measures, it seems that the variation of cross-over and mutation rates does not affect the quality of the NDsolutions, while population size has a significant impact on thenumber of ND solutions.
4.4. Example 2
Example 2 uses the CCMOP model to determine the optimal linkcapacity enhancements under demand uncertainty with a confi-dence level of a1 = 0.9. The upper-level subprogram can be formu-lated as follows:
minu
F1; F2ðuÞ� �
; ð14aÞ
s:t: Pr F1 u;vðu;Q Þð Þ 6 F1� �
P 0:9; ð14bÞ0 6 ua 6 umax
a ; 8a 2 A: ð14cÞ
The objective function (14a) is to minimize the total travel timebudget and the total construction cost subject to the chance con-straint (14b) that requires the probability of the total travel timeless than the budget is greater than or equal to a confidence levelof 0.9, and the limits of the available capacity for enhancement onthe set of capacity enhancement links in the network (14c). Theminimum total travel time budget required to satisfy a confidencelevel of a = 0.9 is equivalent to the Value-at-Risk (VaR) measure infinancial engineering. This VaR measure can be used to measurethe planner risk on the total travel time reliability.
Similar to example 1, we present the results on the effect ofmaximum number of generations, population size, crossover rate,
odel.
Spacing metric Two set coverage (%)
CS(X1,X2) CS(X2,X1)
1.5319 – –1.9117 (+24.8%) 0.9682 0.05001.7732 (+15.7%) 0.7197 0.30111.4983 (�2.2%) 0.4968 0.5351

1616 A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619
and mutation rate on the Pareto frontier and the quality of NDsolutions in Fig. 4 and Tables 3 and 4. The results are similar tothose of the EVMOP model. The maximum number of generationsand population size have a bigger impact on the number of NDsolutions and hence the quality of ND solutions, the variation ofcrossover and mutation rates has a minor effect on the quality ofthe ND solutions. As indicated by the percentage error of spacingmetric in Table 4, it is less than 6% among 10 combinations andslightly more than 1% for the five combinations with a populationsize of 30. The values of CS(X1,X2) and CS(X2,X1) are again nearlyequal (i.e., 0.5:0.5), implying that the ND solutions in the two setsare of similar quality. The solution procedure appears to be robustand effective in solving the non-linear and non-convex probabilis-tic constraint in the CCMOP model.
4.5. Example 3
Example 3 uses the DCMOP model to determine the optimal linkcapacity enhancements under demand uncertainty with a targettotal travel time of eF 1 ¼ 7500. The upper-level subprogram canbe formulated as follows:
minu
1� Pr F1 u;vðu;Q Þð Þ 6 7500ð Þð Þ; F2ðuÞ½ �; ð15aÞ
s:t: 0 6 ua 6 umaxa ; 8a 2 A: ð15bÞ
Table 2Effect of population size, crossover rate, and mutation rate on the quality of ND solutions
Population size Crossover rate Mutation rate Number o
30 0.5 0.1 15720 0.5 0.3 12920 0.5 0.2 13620 0.5 0.1 14020 0.3 0.2 13620 0.3 0.1 13330 0.5 0.3 15630 0.5 0.2 14330 0.3 0.2 14430 0.3 0.1 163
5800
6000
6200
6400
6600
6800
7000
7200
7400
7600
7800
0 4000 8000
Constru
90%
Val
ue o
f TTT
Fig. 4. Pareto frontier of
The objective function (15a) is to minimize the probability of notmeeting the target total travel time of 7500 and the total construc-tion cost subject to the limits of the available capacity for enhance-ment on the set of capacity enhancement links in the network (15a).
Similar to the previous two examples, we present the results onthe effect of maximum number of generations, population size,crossover and mutation rates on the Pareto frontier and the qualityof ND solutions in Fig. 5 and Tables 5 and 6. The trend of the resultsis similar to the previous two examples. That is, choosing propernumber of generations and population size is important, whilecrossover and mutation rates are relatively insensitive to the solu-tion procedure if other parameters are properly chosen.
5. Conclusions and future research
In this paper, three stochastic multi-objective NDP models weredeveloped to determine the optimal link capacity enhancementsunder demand uncertainty. These stochastic multi-objective mod-els used different criteria to account for planner risk preferences onhandling demand uncertainty. Stochastic multi-objective bi-levelprogramming (SMOBLP) formulations were provided in which theupper-level subprogram adopts one of the stochastic multi-objec-tive models to determine the optimal link capacity enhancements,and the lower-level subprogram is a user-equilibrium trafficassignment problem subject to demand uncertainty. A simula-tion-based multi-objective genetic algorithm (SMOGA) procedure
for the EVMOP model.
f ND solutions Spacing metric Two set coverage (%)
CS(X1,X2) CS(X2,X1)
1.5319 – –1.5143 (�1.1%) 0.5477 0.46511.5617 (+1.9%) 0.5159 0.49631.5253 (�0.4%) 0.5096 0.49331.5443 (+0.8%) 0.5223 0.48891.5323 (+0.0%) 0.5350 0.46621.5440 (+0.8%) 0.5159 0.48721.5123 (�1.3%) 0.4904 0.51751.4918 (�2.6%) 0.4968 0.50691.5576 (+1.6%) 0.5350 0.4724
12000 16000 20000
ction Cost
Iter 50Iter 100Iter 200Iter 300
the CCMOP model.

Table 4Effect of population size, crossover and mutation rates on the quality of ND solutions of the CCMOP model.
Population size Crossover rate Mutation rate Number of ND solutions Spacing metric Two set coverage
CS(X1,X2) CS(X2,X1)
30 0.5 0.1 165 1.5021 – –20 0.5 0.3 134 1.4862 (�1.1%) 0.5454 0.466120 0.5 0.2 134 1.4479 (�3.6%) 0.5333 0.481220 0.5 0.1 121 1.4353 (�4.4%) 0.5454 0.466620 0.3 0.3 133 1.4217 (�5.3%) 0.5393 0.477220 0.3 0.1 142 1.4702 (�2.1%) 0.5696 0.446830 0.5 0.3 147 1.5103 (+0.5%) 0.5212 0.493230 0.5 0.2 153 1.5008 (�0.1%) 0.5394 0.480330 0.3 0.3 155 1.4910 (�0.7%) 0.4909 0.513030 0.3 0.1 150 1.5182 (+1.1%) 0.5455 0.4631
Table 3Effect of maximum number of generations on the quality of ND solutions for the CCMOP model.
Maximum number of generations Number of ND solutions Spacing metric Two set coverage
CS(X1,X2) CS(X2,X1)
200 165 1.5021 – –50 62 1.6328 (+8.7%) 0.8727 0.1346100 121 1.9395 (+29.1%) 0.7455 0.2613300 233 1.4731 (�1.9%) 0.4727 0.5336
A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619 1617
was developed to solve these SMOBLP formulations. Numericalexamples were provided to illustrate the applicability of the threestochastic multi-objective NDP models and the solution procedure.Several directions for future research are possible. On the modelingside, only demand uncertainty is considered in the current study.Future research should also consider supply uncertainty (i.e., the
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 4000 8000
Construc
% o
f (TT
T<75
00)
Fig. 5. Pareto frontier of
Table 5Effect of maximum number of generations on the quality of ND solutions for the DCMOP
Maximum number of generations Number of ND solutions
200 13550 52100 84300 155
degradation of network capacity) and route choice uncertainty(i.e., responses of road users under supply and demand uncertaintyin designing reliable roadway networks). On the computationalside, the efficiency of the SMOGA procedure should be enhancedby incorporating local search, better evolutionary strategies, andbetter sampling techniques to speed up the process of finding
12000 16000 20000
tion Cost
Iter 50Iter 100Iter 200Iter 300
the DCMOP model.
model.
Spacing metric Two set coverage (%)
CS(X1,X2) CS(X2,X1)
1.5893 – –1.7445 (+9.7%) 0.9777 0.05771.8991 (+19.5%) 0.6889 0.32941.4423 (�9.2%) 0.4667 0.5419

Table 6Effect of population size, crossover and mutation rates on the quality of ND solutions of the DCMOP model.
Population size Crossover rate Mutation rate Number of ND solutions Spacing metric Two set coverage (%)
CS(X1,X2) CS(X2,X1)
30 0.5 0.1 135 1.5893 – –20 0.5 0.3 98 1.5775 (�0.7%) 0.5111 0.520420 0.5 0.2 103 1.6358 (+2.9%) 0.5185 0.485420 0.5 0.1 110 1.6564 (+4.2%) 0.4889 0.518220 0.3 0.2 107 1.6371 (+3.0%) 0.5333 0.476620 0.3 0.1 113 1.6466 (+3.6%) 0.5481 0.460230 0.5 0.3 127 1.6717 (+5.1%) 0.5555 0.464630 0.5 0.2 124 1.5668 (�1.4%) 0.4740 0.532330 0.3 0.2 128 1.6400 (+3.1%) 0.5185 0.492230 0.3 0.1 136 1.6719 (+5.1%) 0.5037 0.5294
1618 A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619
Pareto optimal solutions. Finally, it is also worthwhile to explorethe mathematical properties and their relationships of the threestochastic multi-objective NDP models.
References
Allsop, R. E., & Charlesworth, J. A. (1977). Traffic in a signal-controlled road network:An example of different signal timings inducing different routes. TrafficEngineering and Control, 18, 262–264.
Bell, M. G. H., & Iida, Y. (1997). Transportation network analysis. Chichester, UK: JohnWiley and Sons.
Boyce, D. E. (1984). Urban transportation network-equilibrium and design models:Recent achievements and future prospects. Environment and Planning A, 16,1445–1474.
Cantarella, G. E., Improta, G., & Sforza, A. (1991). Iterative procedure for equilibriumnetwork traffic signal setting. Transportation Research, 24A, 241–249.
Ceylan, H., & Bell, M. G. H. (2004). Traffic signal timing optimization approach,including drivers’routing. Transportation Research, 38B, 329–342.
Chang, C.-H., Tung, Y.-K., & Yang, J.-C. (1994). Monte Carlo simulation for correlatedvariables with marginal distributions. Journal of Hydraulic Engineering, 120(3),313–331.
Charnes, A., & Cooper, W. (1959). Chance-constrained programming. ManagementScience, 6(1), 73–79.
Chen, A., Chootinan, P., & Wong, S. C. (2006a). New reserve capacity model of asignal-controlled road network. Transportation Research Record, 1964, 35–41.
Chen, A., Kim, J., Lee, S., & Choi, J. (2009). Models and algorithm for stochastic designproblem. Tsinghua Science and Technology, 14(3), 341–351.
Chen, A., Kim, J., Zhou, Z., & Chootinan, P. (2007). Alpha reliable network designproblem. Transportation Research Record, 2029, 49–57.
Chen, A., Lee, D.-H., & Jayakrishnan, R. (2002). Computational study of state-of-the-art path-based traffic assignment algorithms. Mathematics and Computers inSimulation, 59, 509–518.
Chen, A., & Subprasom, K. (2007). Analysis of regulation and policy of private tollroads in a build-operate-transfer scheme under demand uncertainty.Transportation Research, Part A: Policy and Practice, 41(6), 537–558.
Chen, A., Subprasom, K., & Ji, Z. (2003). Mean-variance model for the build-operate-transfer scheme under demand uncertainty. Transportation Research Record,1857, 93–101.
Chen, A., Subprasom, K., & Ji, Z. (2006b). A simulation-based multi-objective geneticalgorithm (SMOGA) for build-operate-transfer network design problem.Optimization and Engineering Journal, 7(3), 225–247.
Chen, A., & Yang, C. (2004). Stochastic transportation network design problem withspatial equity constraint. Transportation Research Record, 1882, 97–104.
Chiou, S. W. (1999). Optimization of area traffic control for equilibrium networkflows. Transportation Science, 33, 279–289.
Chootinan, P., Wong, S. C., & Chen, A. (2005). A reliability-based network designproblem. Journal of Advanced Transportation, 39, 247–270.
Coello Coello, C. A., Van Velhhuizen, D. A., & Lamont, G. B. (2002). Evolutionaryalgorithm for solving multi-objective problems. MA: Kluwer Academic Publishers.
Daganzo, C. F., & Sheffi, Y. (1982). Unconstrained extremal formulation of sometransportation equilibrium problems. Transportation Science, 16, 332–360.
Davis, G. A. (1994). Exact local solution of the continuous network design problemvia stochastic user equilibrium assignment. Transportation Research, 28B, 61–75.
Ferrari, P. (1995). Road pricing and network equilibrium. Transportation Research,29B, 357–372.
Ferrari, P. (2002). Road network toll pricing and social welfare. TransportationResearch, 36B, 471–483.
Fisk, C. S. (1980). Some developments in equilibrium traffic assignment.Transportation Research, 14B, 243–255.
Fisk, C. S. (1984). Game theory and transportation systems modeling. TransportationResearch, 18B, 301–313.
Friesz, T. L. (1985). Transportation network equilibrium, design and aggregation:Key developments and research opportunities. Transportation Research, 19A,413–427.
Friesz, T. L., Cho, H. J., Mehta, N. J., Tobin, R. L., & Anandalingam, G. (1992). Asimulated annealing approach to the network design problem with variationalinequality constraints. Transportation Science, 26(1), 18–26.
Gao, Z. Y., & Song, Y. F. (2002). A reserve capacity model of optimal signal controlwith user-equilibrium route choice. Transportation Research, 36B, 313–323.
Gen, M., & Cheng, R. (2000). Genetic algorithms and engineering optimization. NewYork: John Wiley and Sons, Inc.
Goldberg, D. (1989). Genetic algorithms in search, optimization, and machine learning.Reading, MA: Addison-Wesley.
Jayakrishnan, R., Tsai, W. K., Prashker, J. N., & Rajadhyaksha, S. (1994). A faster path-based algorithm for traffic assignment. Transportation Research Record, 1443,75–83.
Liu, B. (1997). Dependent-chance programming: A class of stochastic programming.Computers and Mathematics with Applications, 34, 89–104.
Liu, B. (2002). Theory and practice of uncertain programming. Heidelberg: Physica-Verlag.
Lo, H. K., Luo, X. W., & Siu, B. W. Y. (2006). Degradable transport network: Traveltime budget of travelers with heterogeneous risk aversion. TransportationResearch, 40B, 792–806.
Magnanti, T. L., & Wong, R. T. (1984). Network design and transportation planning:Models and algorithms. Transportation Science, 18, 1–55.
Meng, Q., & Yang, H. (2002). Benefit distribution and equity in road network design.Transportation Research, 36B, 19–35.
Mirchandani, P., & Soroush, H. (1987). Generalized traffic equilibrium withprobabilistic travel times and perceptions. Transportation Science, 21, 133–152.
Osyczka, A., & Kundu, S. (1995). A new method to solve generalized multicriteriaoptimization problems using the simple genetic algorithm. StructuralOptimization, 10, 94–99.
Prashker, J. N., & Bekhor, S. (2004). Route choice models used in the stochastic userequilibrium problem: A review. Transport Reviews, 24, 437–463.
Rothlauf, F. (2000). Representations for genetic and evolutionary algorithms. Studies inFuzziness and Soft Computing (Vol. 104). New York: Physica-Verlag.
Shao, H., Lam, W. H. K., & Tam, M. L. (2006). A reliability-based stochastic trafficassignment model for network with multiple user classes under uncertainty indemand. Network and Spatial Economics, 6, 173–204.
Sheffi, Y. (1985). Urban transportation networks: Equilibrium analysis withmathematical programming methods. England Cliffs, NJ: Prentice Hall.
Subprasom, K., & Chen, A. (2007). Effects of regulation on highway pricing andcapacity choice of a build-operate-transfer scheme. ASCE Journal of ConstructionEngineering and Management, 133(1), 64–71.
Suwansirikul, C., Friesz, T. L., & Tobin, R. L. (1987). Equilibrium decomposedoptimization: A heuristic for the continuous equilibrium network designproblem. Transportation Science, 21, 254–263.
Tan, K. C., Khor, E. F., & Lee, T. H. (2005). Multiobjective evolutionary algorithms andapplications. Springer.
Tzeng, G. H., & Tsaur, S. H. (1997). Application of multiple criteria decisionmaking for network improvement. Journal of Advanced Transportation, 31(1),49–74.
Waller, S. T., & Ziliaskopoulos, A. K. (2001). Stochastic dynamic network designproblem. Transportation Research Record, 1771, 106–113.
Waller, S. T., Schofer, J. L., & Ziliaskopoulos, A. K. (2001). Evaluation with trafficassignment under demand uncertainty. Transportation Research Record, 1771,69–74.
Wong, S. C., & Yang, C. (1999). An iterative group-based signal optimization schemefor traffic equilibrium networks. Journal of Advanced Transportation, 33,201–217.
Wong, S. C., & Yang, H. (1997). Reserve capacity of a signal-controlled road network.Transportation Research, 31B, 397–402.
Xu, T., Wei, H., & Wang, Z.-D. (2009). Study on continuous network design problemusing simulated annealing and genetic algorithm. Expert Systems withApplications, 36(2P2), 2735–2741.
Yang, H., & Bell, M. G. H. (1997). Traffic restraint, road pricing and networkequilibrium. Transportation Research, 31B, 303–314.
Yang, H., & Bell, M. G. H. (1998). Models and algorithms for road network design: Areview and some new developments. Transport Reviews, 18, 257–278.

A. Chen et al. / Expert Systems with Applications 37 (2010) 1608–1619 1619
Yang, H., & Huang, H. J. (1998). Principle of marginal-cost pricing: How does it workin a general network? Transportation Research, 32A, 45–54.
Yang, H., & Lam, W. H. K. (1996). Optimal road tolls under conditions of queuing andcongestion. Transportation Research, 30A, 319–332.
Yang, H., & Wang, J. Y. T. (2002). Travel time minimization versus reserve capacitymaximization in the network design problem. Transportation Research Record,1783, 17–26.
Yang, H., & Yagar, S. (1994). Traffic assignment and traffic control in generalfreeway-arterial corridor systems. Transportation Research, 28B, 463–486.
Yang, H., & Yagar, S. (1995). Traffic assignment and signal control in saturated roadnetworks. Transportation Research, 29A, 125–139.
Yang, H., Yagar, S., Iida, Y., & Asakura, Y. (1994). An algorithm for inflow controlproblems on urban freeway networks with user-optimal flows. TransportationResearch, 28B, 123–139.
Yang, H., Zhang, X., & Meng, Q. (2004). Modeling private highways in networks withentry–exit based toll charges. Transportation Research, 38B, 91–213.
Yin, Y. (2002). Multiobjective bi-level optimization for transportation planning andmanagement problems. Journal of Advanced Transportation, 36(1), 93–105.