Embed Size (px)
Citation preview

stereo
• Outline :• Remind class of 3d geometry• Introduction• How human see depth• The principle of triangulation• Epipolar geometry• Fundamental Matrix• Rectification• correspondence
• Correlation• Feature based• Other 3d reconstruction methods

Remind from the last lecture
Single view modeling

Projection in 2D

Vanishing points (2D)

Two point perspective

Vanishing lines
Multiple Vanishing Points Any set of parallel lines on the plane define a vanishing point The union of all these vanishing points is the horizon line
Also called vanishing line Note that different planes (can) define different vanishing lines

Vanishing pointVanishing point

Perspective cues

Perspective cues

Perspective cues

Comparing heights•Vanishing point Vanishing point

Measuring height

Cross ratio
scene cross ratio
Image cross ratio

Cross ratio

stereo
• What is stereo in computer vision?• What it’s god for?

Introduction
• There is no sense of depth in image that seen from one camera.• We will see in this chapter how to produce images that have sense of depth.

Stereo
Many slides adapted from Steve Seitz

Introduction
• Computer stereo vision is the extraction of 3D information from digital images.• Human being use stereo to sense the distance.

How human see depth

Motivation-Application
• Stereo vision is highly important in fields such as• robotics:
• Robot navigation.• Car navigation.
• Extract information about the relative position of 3D objects.• Making the 3d moves.• Vedieo games that use stereo .

Motivation .con

goal
• Given two or more images of a same object (from different points) we want a recovery of the object in the real word .

Goal con.“Demo”

The principle of triangulation con.• Given projections of a 3D point
“x” in two or more images (with known focal length), find the coordinates of the point.
• The 3d points at the intersection of the rays passing through the matching the image points and the associated optical center .

Depth from disparity
f
x x’
BaselineB
z
O O’
X
f
z
fBxxdisparity
𝛼𝛽
We can see that we have Similarity between the triangles (X,O,O’) and (X,x,x’)

26
Stereo VisionTwo cameras: Left and RightOptical centers: OL and OR
Virtual image plane is projection of actual image plane through optical centerBaseline, b, is the separation between the optical centersScene Point, P, imaged at pL and pR
pL = 9pR = 3Disparity, d = pR – PL = 6
Disparity is the amount by which the two images of P are displaced relative to each other
Depth, z= bfpd
p = pixel width

Depth from disparity
f
x x’
BaselineB
z
O O’
X
f
z
fBxxdisparity
Disparity is inversely proportional to depth!
Z’Small disparity => large depth

Depth from disparity
f
x x’
BaselineB
z
O O’
X
f
z
fBxxdisparity
Disparity is inversely proportional to depth!
ZLarge disparity => small depth

Reconstruction
Sometimes the rays will never intersect because we have feature localization error, so we look for the closest point to the rays .

Stereo with convergence cameras
• short base line:large common filed of view .large depth error.

Stereo with convergence cameras
• Large base line:Small depth error .Small common filed of view.

Verging optical axes
• Two optical axes intersect at a fixation point:
the common filed of view increased.
small depth error.• Corresponding is more difficult.

Problems in stereo vision
• We have a problem to match a point in the two images.
correspondence
• So we use epipolar geometry.

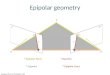
Epipolar geometry
For each point in image plane 1 there is a set of points that can match (q’,p’). q
p
P’q’
O O’

Epipolar geometry
x x’
• Baseline – line connecting the two camera centers

• Epipolar Plane – plane containing baseline (1D family)• Epipoles = intersections of baseline with image planes = projections of the other camera center= vanishing points of the motion direction
• Baseline – line connecting the two camera centers
Epipolar geometryp
p p’

Epipolar line
epipole
Epipolar plan

The epipole

Epipolar constraint

• Potential matches for p have to lay on the corresponding epiploar line l’
• Potential matches for p’ have to lay on the corresponding epipolar line l.
• e , e’ called epipoles.

Vector cross product to matrix vector multiplication
],,[ yxyxzxxzzyyz
zyx
zyx BAABBABABABA
BBB
AAA
kji
BA
z
y
x
xy
xZ
yZ
B
B
B
AA
AA
AA
BSBA
0
0
0
. ],,[ yxyxzxxzzyyz BAABBABABABA

Essential matrix
T=translationR=rotation

Essential matrix
0 lT
r PRTP0)( l
Tl PTTP
)( TPRP lr
)( TPPR lrT
Tl
Tr TPRP )(
}
Coplanarity constraint between vectors T , )( TPl lP,

Essential matrix
0 lT
r PRTP } 0][ lxT
r PTRP 0 lT
r EPP
Essential Matrix
E=R
0
0
0
xy
xZ
yZ
TT
TT
TT xT

Homogeneous coordinates Conversion
Converting to homogeneous coordinates
homogeneous image coordinates
homogeneous scene coordinates
Converting from homogeneous coordinates

Intrinsic transformation - Principal Point

Camera transformation
2D poin
t (3x1
)
Camera to pixel coord.
trans. matrix
(3x3)
Perspectiveprojection
matrix(3x4)
World to camera coord.
trans. matrix(4x4)
3Dpoin
t(4x1
)

Intrinsic transformation

Fundamental matrix
• We assume that camera calibration is known what if we don’t know the camera calibration.
• We use fundamental matrix to solve this problem
0lT
r Fxx

Fundamental matrix
Assume we know the camera calibration:Then: is the un-normalized coordinates . = K=
lll pMx
lp
lM
lM

Fundamental matrix
lll PMx
rrr PMx 0l
Tr EPP
lll PxM 1
rrr PMx T
rT
rT
r PMx
}01
llT
rT
r xEMMx
0][ 1 ll
Tr
Tr xEMMx
0lT
r Fxx

Fundamental matrix
• M is 4*3 matrix , so how we get • Assume we get M.• We use pseudo inverse to get it.
TT MMMMpinv 1)()(

Fundamental matrix
• Given appoint on the left camera what can we know from the fundamental matrix.
• Every point on the epipolar line of that correspond the point is accomplish the equation.
0''
x
ihg
fed
cba
xFxx TT0' Fxx T

• Assume ]1[ yxX
3
2
1
f
f
f
x
ihg
fed
cba
Fx 0'')'( 321
3
2
1
fyfxf
f
f
f
X T
We got a equation of the epipolar line .

Fundamental Matrix. con
0''
x
ihg
fed
cba
xFxx TT
Given a point in left camera x , epiploar line in right camera is Fxur

Fundamental Matrix. con
0''
x
ihg
fed
cba
xFxx TT
• 3*3 matrix with 9 components• Rank 2 matrix( due to S )• 7 degrees of freedom• Given a point in left camera x , epiploar line in
right camera is Fxur

Computing fundamental matrix
• F (the fundamental matrix ) has 9 variables.• In order to compute F we must get some pointes.• How much pointes we need.
0
00
'
''
x
ihg
fed
cba
x
x
ihg
fed
cba
xFxx
T
TT

Computing fundamental matrix
• we can set i=1;• All epipolar lines intersect in the epipole point .• =epipole in the left image.• No mater what is x’ the equation Is always true.
00''
ee
TT x
ihg
fed
cba
x
ihg
fed
cba
xFxx
ex
Epipole is an eigenvector of F with eigenvalue =0

Computing fundamental matrix
• F has 7 degree of freedom .• We need minimum 4 points to calculate i={1,2,3,4}.
0
1
'
'
11 3231
232221
131211
i
i
T
i
i
y
x
ff
fff
fff
y
x

Computing fundamental matrix
0)''()''()''( 333231232221131211 fyfxffyfxfyfyfxfx iiiii
0
''
''
''
1 333231
232221
131211
fyfxf
fyfxf
fyfxf
y
x
i
i
i
i
i

Fundamental Matrix.con
0)''()''()''( 333231232221131211 fyfxffyfxfyfyfxfx iiiii
0'''''' 333231232221131211 fyfxffyyfyxfyfxyfxxfx iiiiiiiii
One equation for one point correspondence

Computing fundamental matrix
1
1
1
1
1
1
1
1
33
32
31
23
22
21
13
12
'8
'888
'88
'888
'88
'8
'7
'777
'77
'777
'77
'7
'6
'666
'66
'666
'66
'6
'5
'555
'55
'555
'55
'5
'4
'444
'44
'444
'44
'4
'3
'333
'33
'333
'33
'3
'2
'222
'22
'222
'2
'2
'1
'111
'11
'111
'11
'1
f
f
f
f
f
f
f
f
f
yxyyyyxxxyxx
yxyyyyxxxyxx
yxyyyyxxxyxx
yxyyyyxxxyxx
yxyyyyxxxyxx
yxyyyyxxxyxx
yxyyyyxxxyxx
yxyyyyxxxyxx

Epipolar lines

Epipolar lines

Rectification
• Why we need rectification ?
Because the matching point will be in the same row.

Rectification
• Rectification: warping the input images (perspective transformation) so that epipolar lines are horizontal

Rectification
Image Reprojection reproject image planes onto
common plane parallel to baseline Notice, only focal point of camera
really matters(Seitz)

Rectification
slide: R. Szeliski

Rectification• Any stereo pair can be rectified by rotating and scaling
the two image planes (=homography)
• We will assume images have been rectified so• Image planes of cameras are parallel. • Focal points are at same height.• Focal lengths same.
• Then, epipolar lines fall along the horizontal scan lines of the images

Correspondence
• For every point in image plane 1 we have a set of point that may match in the image plane2.
• How we find the best matching point ?• Correlation based
Attempt to establish correspondence by matching image intensities-usually over a window of pixels in each image.• Feature based
attempt to establish a correspondence by matching a sparse sets to image features (edges…).

Matching cost
disparity
Left Right
scanline
Correspondence search-via correlation
• Slide a window along the right scanline and compare contents of that window with the reference window in the left image
• Matching cost: SSD or normalized correlation

Correlation methods
• Sum of squares different(SSD)=
• Absolute difference (AD) =
• CC =
• Normalized correlation (NC) =
• MC =
2)( rightleft II
|)(| rightleft II
rightleft II
rightleft
rightleft
II
II
)(
))((64
1rightrightleftleft
rightleft
II

Window size
• If we take a too small window then we will more details but more noise !• If we take a too large window the matching will be less sensitive to noise.
W=3 W=20

Disparity map
• Disparity map is a map that helps us to express our match after we have done the correspondence ( correlation ) between the left and the right images, that it uses the intensity of gray color to express the disparity between the two matching windows (bright color mention that disparity is large, and dark color express small disparity) .

Disparity map.con
• If we were to perform this matching process for every pixel in the left hand image, finding its match in the right hand frame and computing the distance between them you would end up with an image where every pixel contained the distance/disparity value for that pixel in the left image.

Right imageLeft image
Disparity map

Correlation method
• Not working good enough in some cases (images that have few details).• Easy to implement .• We can use dense disparity map.

Failures of correspondence search
Textureless surfaces Occlusions , repetition

Feature based approach

Feature based
• Features• Edge points• Lines• Corners
• Matching algorithm• Extract features in the stereo pair• Define similarity measure• Search correspondence using similarity measure and the epipolar geometry

Feature based methods
23
22
21
20 )()()()(
1
rlrlrlrl iiwmmwwllws
l-length - orientation m-coordinates of the midpointi-average intensity along the line
W- the weights

Feature based approach
• Pros :• Relatively insensive to illumination changes• Good for man made scenes with strong lines but weak texture or texurless
surfaces• Work well on edges• Faster than correlation approach
• Cons:• Only sparse depth map• May be tricky

Winner take all
• Tow pixels(in image plan1) may correesponed to the same pixel in image plane2.
ab
c

Ordering

Global approach
• Use dynamic programing to force pixels along scan line.• If a is in the left side of b then will match to a pixel that in the liftest
side.• We will match every pixel

Global approach

Global approach
• We want to minimize the coast of the correspondence(starting from the left to the right).


Three Views
Matches between points in the first two images can be checked by re-projecting the corresponding three-dimensional point in the third image