-
Stepping Motor Driving Disturbance Test and
Identification of Mathematical Disturbance Model
Toshio Kamiya
NEC TOSHIBA Space Systems, Ltd., Fuchu, Tokyo, 183-8551,
Japan
Abstract: Stepping motor is one of the most serious disturbance
sources which generate
high-frequency vibration and deteriorate pointing stability of
satellite. Those disturbance
sources need to be under control of satellite system design. To
control disturbance sources
in system design and meet pointing stability requirements, we
need both of a high-
frequency vibrations control method and accurate mathematical
disturbance models. For
this reason, we tested a stepping motor and evaluated the data
of driving disturbance vi-
brations and identified “stepping motor mathematical disturbance
model”. Consequently,
we realized an accurate mathematical disturbance model of
stepping motor which in-
cludes flexible structure as inertial load. This mathematical
model can be applied to all
stepping motors in which key parameters like stepping motor
characteristics and inertial
load’s structural characteristics are given. Keywords: Stepping
Motor, Disturbance, Microvibration, Pointing Stability, Model
Iden-
tification
ステッピングモータステッピングモータステッピングモータステッピングモータ駆動擾乱試験駆動擾乱試験駆動擾乱試験駆動擾乱試験とととと擾乱擾乱擾乱擾乱モデルモデルモデルモデル同定同定同定同定
摘要:衛星内部に存在する各種の振動擾乱源の中でも擾乱レベルが高く、衛星システム設計の際の擾
乱管理対象として注意が必要なステッピングモータ駆動系について、モータ駆動時に発生する擾乱の
評価試験を行い、データ評価ならびに擾乱モデル同定を行った。結果として、太陽電池パドル駆動系
のような、柔軟性構造特性を有する慣性負荷をモータ負荷として乗せたステッピングモータ駆動系に
ついて、実測結果を精度良く再現できる擾乱数学モデルを構築した。
1. Introduction
Stepping motor is one of the most serious distur-
bance sources which generate high-frequency vibra-
tion and deteriorate pointing stability of satellite.
Those disturbance sources need to be under control
of satellite system design. To control disturbance
sources in system design and meet pointing stability
requirements, we need both of a high-frequency vi-
brations control method and accurate mathematical
disturbance models. For this reason, we tested a step-
ping motor and evaluated the data of driving distur-
bance vibrations and identified “stepping motor
mathematical disturbance model”. Consequently, we
realized an accurate mathematical disturbance model
of stepping motor which includes flexible structure
as inertial load. This mathematical model can be ap-
plied to all stepping motors in which key parameters
like stepping motor characteristics and inertial load’s
structural characteristics are given.
“Microvibration management” means satellite sys-
tem design regarding satellite internal microvibration.
Microvibration management is conducted for the
purpose of realization of the pointing stability that is
required from the satellite mission. In evaluating a
satellite mission which requires a pointing stability in
a short term such as camera exposure, the microvi-
brations generated from satellite internal disturbance
sources such as reaction wheel or stepping motor
become critical factors which degrade the pointing
stability. For that reason, microvibration manage-
ment and pointing stability evaluation should be a
pair in satellite system design. In this paper, stepping
motor which is known as one of the most serious
disturbance sources is taken as an object.
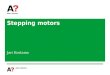
2. What is a Satellite Disturbance Management ?
This section shows the fundamental policy of mi-
crovibration management, especially performed for
the SELENE satellite. In order to clarify the man-
agement factors for microvibration management, the
affecting factors on the pointing stability which exist
in each frequency range are shown in Fig.1.
-
In satellite system design, comprehensive evalua-
tion of each factor shown in Fig.1 must be carried
out. In SELENE, the system requirement (0.003
[deg/sec]) for the attitude control subsystem (ACS) is
applied only to the affecting factors whose frequency
ranges are lower than the attitude control frequency
(approximately 0.05[Hz]). Examples of such factors
are natural disturbances etc.. High frequency distur-
Disturbance
ManagementPointing Stability
Requrements
0 1 2 3 4 5 6 7 8 9 10
-30
-20
-10
0
10
20
30
Z-T
orq
ue [
Nm
]
ti me [sec]
no rmal pulserandom pulse
10-1
100
101
102
103
104
10-4
10-3
10-2
10-1
100
101
102
Frequency (Hz)
Z-T
orqu
e [
Nm
]
no rmal pulserandom pulse
100
101
102
10-2
10-1
100
101
102
Frequency [Hz]
Q
XYZ
(A) Disturbance
Mathematical Model
(B) Structural Transfer
Characteristic
(C) Pointing Stability
10-2
10-1
100
101
102
-20
-10
0
10
20
Frequency response (Rotational)
X -
gain
[dB]
10-2
10-1
100
101
102
-5
0
5
Y -
gain
[dB]
10-2
10-1
100
101
102
-10
0
10
20
Frequency [Hz]
Z -
gain
[dB]
10-3
10-2
10-1
100
10-11
10-10
10-9
10-8
10-7
10-6
10-5
10-4
10-3
← TOTAL
↑ SAP Peak
↑ HGA Boom-Reso
↑ HGA Ref-Reso
↑ RW Peak
↑ GRD Total
↑ UP I 80PPS
↑ UP I 800PPS
↓ IMU Dither
↑ AOCS
← LISM(TC) 2 .7e-006rad/0.0065sec
← LISM(MI) 5 .7e-006rad/0.013sec
← LISM(SP) 0 .00014rad/0.091sec
← UPI 0 .015deg/1sec
← LMAG 0.1deg/1sec
time [sec]
X -
Att
itud
e Err
or
[rad,
0-P]
Comparison of Test and Simulation (MOOG Type-3)
1.57E-05
3.29E-05
5.63E-06 5.85E-066.19E-06
1.11E-05
2.19E-05
4.96E-05
4.66E-06
3.52E-05
2.47E-05
4.66E-06
3.34E-06
4.80E-06
1.19E-05
2.15E-05
6.33E-05
1.00E-06
1.00E-05
1.00E-04
1 10 100 1000
Drive Pulse Rate [PPS]
Poin
ting
Sta
bilit
y [r
ad/dt
1se
c, P-P]
MOOG Type-3 TestData
SimulationData
θ ��IQT =×
Fig. 2. Outline of Disturbance Management
System requirement for ACS
0.003 deg/s (Apply to below
attitude control frequency)
0.1Hz 1Hz 10Hz 100Hz
Disturbances
Other
influences
Frequency range of attitude control
Characterictic frequencies of flexible structure
(SAP, HGA, LRS, LMAG, Sloshing etc.)
Natural disturbances (Solar pressure, Gravity gradient etc.)
Characteristic frequencies
of satellite body 10Hz-
Microvibrations (SAP/HGA Stepping motor,
RW, GRD Compressor etc.)
DC
The target frequency range of microvibration
management is the whole frequencies!
Pointing stability
requirements
Requirements from observational equipments
(Apply to the whole frequency)
ACS subsystem
management factors Bus system management factors
Frequency rangeFrequency rangeFrequency rangeFrequency range
Factors ofFactors ofFactors ofFactors of
influenceinfluenceinfluenceinfluence
Fig. 1. Frequency distribution of pointing stability
requirements and affecting factors (SELENE)
-
bances (reaction wheel, stepping motor etc.) are in-
applicable for the ACS design. Accordingly, for the
microvibration management of a satellite system
design, it is not necessary to manage directly the
natural disturbances with a long cycle. The pointing
stability of a long cycle below the attitude control
frequency can be considered to be contained in the
system requirement for ACS (0.003[deg/sec]). The
internal disturbances and the structural characteris-
tics etc. which are indicated in Fig.1 with an asterisk
become direct targets for the SELENE system mi-
crovibration management. That is, microvibration
management of the SELENE system means compre-
hensive management of the factors indicated with an
asterisk in order to meet the pointing stability re-
quirements.
Fig.2 shows general image of disturbance man-
agement. Basically, disturbance management con-
sists of three parts as shown below,
• Disturbance Mathematical Modelling • Structural Transfer
Modelling • Pointing Stability Analysis Fig.3 shows a disturbance
modelling of HGA an-
tenna (main subject of this paper). Fig.4 shows other
disturbance sources such as reaction wheels and
equipment including compressor. Fig.5 shows a
structural transfer modelling such as transfer function
of appendage flexible structures or satellite body
panel flexible modes or damping ratio of an antenna
boom. Fig.6 shows
In this paper, we pick up disturbance mathematical
modelling. Here, we emphasize that if a equipment
which generates disturbances can be formulated ana-
lytically, and if the disturbance mathematical model
duplicate the actual disturbances, then there is no
need to test by actual equipment.
0 1 2 3 4 5 6 7 8 9 10
-30
-20
-10
0
10
20
30
Z-Tor
que [
Nm
]
time [sec]
normal pulserandom pulse
10-1
100
101
102
103
1010
-4
10-3
10-2
10-1
100
101
102
Frequency (Hz)
Z-Tor
que
[Nm
]
normal pulserandom pulse
Low Disturbance Drive Algorithm (HGA)
High Accuracy Test Based Dynamics Model
Comparison of Test and Simulation (MOOG Type-3)
1 .57E-05
3.29E-05
5 .63E-06 5 .85E-066.19E-06
1 .11E-05
2.19E-05
4 .96E-05
4 .66E-06
3.52E-05
2.47E-05
4 .66E-06
3 .34E-06
4.80E-06
1 .19E-05
2.15E-05
6 .33E-05
1.00E-06
1.00E-05
1.00E-04
1 10 100 1000
Drive Pulse Rate [PPS]
Poin
ting S
tabi
lity
[rad/
dt1sec, P-P]
MOOG Type-3 TestData
SimulationData
High Accuracy Test Based Dynamics Model
Comparison of Test and Simulation (MOOG Type-3)
1 .57E-05
3.29E-05
5 .63E-06 5 .85E-066.19E-06
1 .11E-05
2.19E-05
4 .96E-05
4 .66E-06
3.52E-05
2.47E-05
4 .66E-06
3 .34E-06
4.80E-06
1 .19E-05
2.15E-05
6 .33E-05
1.00E-06
1.00E-05
1.00E-04
1 10 100 1000
Drive Pulse Rate [PPS]
Poin
ting S
tabi
lity
[rad/
dt1sec, P-P]
MOOG Type-3 TestData
SimulationData
Stepper Motor in
HGA/SAP/UPI
Stepper Motor Model Identification Test
Fig. 3. Disturbance Modelling
Analysis Based Model –Reaction Wheel
Flywheel in RW/Gyro
Test Based Model –GRD Compressor
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8-15
-10
-5
0
5
10
15
time [sec]
Forc
e [N
]
100
101
102
103
10-3
10-2
10-1
100
101
Frequency [H z]
Forc
e [
N]
RW Disturbance Test for Solar-B
Other Disturbance Source:
Compressor used in GRD
If RW has critical efffects on
pointing stability, you can
conduct the disturbance test,
and design accuracy will be
much better.
Fig. 4. Disturbance Modelling
Disturbance Source
Mission Equipment
Disturbance Source
Mission Equipment
100
101
102
10-2
10-1
100
101
102
Frequency [Hz]
Q
XYZ
Analysis Based –Satellite Body Modes (NASTRAN)
HGA-Boom Hammering Test
-5.00E+00
-4.00E+00
-3.00E+00
-2.00E+00
-1.00E+00
0.00E+00
1.00E+00
2.00E+00
3.00E+00
4.00E+00
5.00E+00
2040 2540 3040 3540 4040
Data No. (dt=1/2560*6)
[m/s
ec^2
]
Hammering Data
zetaA= 0.2
zetaB= 0.04
zetaC= 0.01
Test Based –Damping Ratio of HGA-Boom
10-2
10-1
100
101
102
-20
-10
0
10
20
Frequency response (Rotational)
X -
gain
[dB
]
10-2
10-1
100
101
102
-5
0
5
Y -
gain
[dB
]
10-2
10-1
100
101
102
-10
0
10
20
Frequency [Hz]
Z -
gain
[dB
]
Analysis Based –Flexible Appendages Modes
Fig.5. Structural Transfer
Auto spectrum
1.00E-14
1.00E-07
1.00E-13
1.00E-12
1.00E-11
1.00E-10
1.00E-09
1.00E-08
0 1600 500 1000Frequency (Hz) 5Z+
34 : 5Z+ 1test13_6
Auto spectrum
1.00E-12
1.00E-05
1.00E-11
1.00E-10
1.00E-09
1.00E-08
1.00E-07
1.00E-06
0 1600 500 1000Frequency (Hz) 5X+
35 : 5X+ 1test13_6
Auto spectrum
1.00E-14
1.00E-07
1.00E-13
1.00E-12
1.00E-11
1.00E-10
1.00E-09
1.00E-08
0 1600 500 1000Frequency (Hz) 5Y+
36 : 5Y+ 1test13_6
Campbell Diagram
0.00
1600.00
500.00
1000.00
1500.00
500.00 6000.00 2000.00 4000.00RPM
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
0.858
0.665
0.472
0.279
LinearAcceleration
25011 :24Z+ 1Z+ 626
13-Feb-04 16:21:15
Test Based –Satellite Body Transfer Characteristics (Under
Evaluation)
100
101
102
103
104
10-1
100
101
102
103
F requ ency [H z]
Q [
]
Fig.6. Structural Transfer
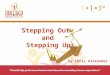
3. Outline of Stepping Motor Driving Disturbance
Test
Fig.7 shows a test configuration of stepping motor
driving disturbance test. This configuration includes
rigid mass as an inertial load on the motor, and rigid
plate as a motor attachment to the 3-axis torquemeter.
Torquemeter is fixed on air-suspension table to re-
duce a transmission of ground vibration. Fig.8 shows
schematic diagram of test configuration. Fig.9 shows
other test configurations. Rigid inertial load is re-
placeable to flexible inertia. Rigid attachment is re-
placeable to flexible attachment either.
Fig.10 shows the internal structure of stepping mo-
tor. Stepping motor can be divided into three parts.
Rotor side and stator side, rotor side consists of out-
put axis and input axis through contact with har-
monic drive (hereinafter called H/D). The H/D is a
compact, light weight and high ratio torque transmis-
sion device which is used in many electrically actu-
ated antenna. The H/D is a special gear-drive speed
reduction system whose operation principle is based
on elastic deformation rather than rigid-body motion
of the general gearing system. Table 1 shows a
specification of test system.
-
Rigid Inertia
Stepping Motor
Rigid Attachment
Three-Axis Torquemeter
Air-Suspension Table
Fig.7. Test Configuration (Rigid Inertia)
慣性負荷(円柱形)
モータ
モータ固定治具
キスラーテーブル
エアサステーブル
加速度計(感度軸:円の接線方向)
AMP
チャージAMP
PC A/Dボード
BNC端子パネル
オシロスコープ
オシロスコープ
モータ 駆動回路
OSC
BNC Port
OSC
Charge AMP
Charge AMP
A/D board
Air-suspension Table
Inertial Load
Stepping Motor
Stepping Attach.
Torquemeter
Accel. Pick-up Sensing Axis: tangential
Motor Driver Elec.
Fig.8 Test Configuration
Flexible
Inertial Load
Flexible
Attachment
Flexible
Attachment Fig.9. Other Test Configuration
Harmonic Drive Harmonic Drive
Input Axis Output Axis
GearRatio : 160 : 1
: Harmonic Drive (Output Axis) and
Output I/F
: Harmonic Drive (Input Axis) and
MotorRotorAxis
: Actuator andMotorHousing and Other Parts
(That is All of the MotorUnit except Upper 2 Parts)
Rotor Side
Stator Side
①①①①::::
②②②②::::
③③③③::::
MotorHousing
Actuator
MotorRotorAxis
Output I/F
Fig.10. Internal Structure of Stepping Motor
Table 1. Specification of Test System
Torquemeter
output 3-axis torque / force
frequency 5[Hz]~1.7[kHz] resolution Not greater than 0.01[N]
Data Recorder
sampling rate 2048[Hz]
measurement time below approximately 30[s]
4. Test Data
In this chapter, test data is shown. Each figure
shows time-based disturbance torque profile and fre-
quency characteristic of the same data.
Fig.11 shows 1PPS (PPS: pulse per second) driv-
ing disturbance torque in the configuration of rigid
inertia and rigid attachment. As shown in this figure,
we can see the characteristic mode (69Hz) which is
characterized by the rigid inertia and the H/D stiff-
ness.
Fig.12 shows 69PPS driving disturbance torque in
the configuration of rigid inertia and rigid attachment.
As shown in this figure, we can see a mechanical
resonance which is caused by the correspondence
between characteristic mode (69Hz) and driving
pulse rate.
Fig.13 shows 1PPS driving disturbance torque in
the configuration of flex1 inertia (3.3Hz) and rigid
attachment. As shown in this figure, we can see the
characteristic mode (3.3Hz) which is characterized
by the flex1 inertia and the H/D stiffness. Higher
structural modes also can be seen in the diagram.
Fig.14 shows 3.3PPS driving disturbance torque in
the configuration of flex1 inertia and rigid attach-
ment. As shown in this figure, we can see a mechani-
cal resonance which is caused by the correspondence
between characteristic mode (3.3Hz) and driving
pulse rate.
Fig.15 shows 1PPS driving disturbance torque in
the configuration of flex2 inertia (6.1Hz) and rigid
attachment. As shown in this figure, we can see the
characteristic mode (6.1Hz) which is characterized
by the flex2 inertia and the H/D stiffness. Higher
structural modes also can be seen in the diagram.
Fig.16 shows 6.1PPS driving disturbance torque in
the configuration of flex2 inertia and rigid attach-
ment. As shown in this figure, we can see a mechani-
cal resonance which is caused by the correspondence
between characteristic mode (6.1Hz) and driving
pulse rate.
Fig.17 shows 1PPS driving disturbance torque in
the configuration of rigid inertia and flexB1 attach-
ment. As shown in this figure, we can see the charac-
teristic mode (13.4Hz) which is characterized by the
rigid inertia / stepping motor and flexB1 attachment.
Fig.18 shows 13.4PPS driving disturbance torque
in the configuration of rigid inertia and flexB1 at-
tachment. As shown in this figure, we can see a me-
chanical resonance which is caused by the corre-
spondence between characteristic mode (13.4Hz) and
driving pulse rate.
Table2 shows the characteristic frequency and Q-
factor of each configuration. As shown in this table,
we can see the followings,
• Q-factor of the resonance between inertial load and driving
pulse rate: 2 – 6 times
• Q-factor of the resonance between motor attach-ment and
driving pulse rate: 9.5 – 30 times
-
Fig.11. Rigid Inertia/Rigid Attach./1PPS
Fig.12. Rigid Inertia/Rigid Attach./69PPS
Fig.13. Flex1 Inertia/Rigid Attach./1PPS
Fig.14. Flex1 Inertia/Rigid Attach./3.3PPS
Fig.15. Flex2 Inertia/Rigid Attach./1PPS
Fig.16. Flex2 Inertia/Rigid Attach./6.1PPS
Fig.17. Rigid Inertia/FlexB1 Attach./1PPS
Fig.18. Rigid Inertia/FlexB1 Attach./13.4PPS
0 5 10 15
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Z-T
orq
ue [
Nm
]
time [sec]
10-1
100
101
102
103
104
10-4
10-3
10-2
10-1
100
Frequency (Hz)
Z-Tor
que
[Nm
]
0 1 2 3 4 5 6 7 8 9
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Z-T
orqu
e [N
m]
time [sec]
10-1
100
101
102
103
104
10-5
10-4
10-3
10-2
10-1
Frequency (Hz)
Z-T
orqu
e [N
m]
0 5 10 15-1.5
-1
-0.5
0
0.5
1
Z-T
orq
ue [
Nm
]
time [sec]
10-1
100
101
102
103
104
10-5
10-4
10-3
10-2
10-1
100
Frequency (Hz)
Z-Tor
que
[Nm
]
0 1 2 3 4 5 6 7 8 9
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Z-T
orq
ue [
Nm
]
time [sec]
10-1
100
101
102
103
104
10-5
10-4
10-3
10-2
10-1
Frequency (Hz)
Z-Tor
que
[Nm
]
0 5 10 15
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Z-Torq
ue [
Nm
]
time [sec]
10-1
100
101
102
103
104
10-5
10-4
10-3
10-2
10-1
100
Frequency (Hz)
Z-T
orqu
e [N
m]
0 1 2 3 4 5 6 7 8 9 10
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Z-T
orqu
e [N
m]
time [sec]
10-1
100
101
102
103
104
10-5
10-4
10-3
10-2
10-1
100
Frequency (Hz)
Z-T
orqu
e [N
m]
0 5 10 15
-10
-8
-6
-4
-2
0
2
4
6
8
10
Z-Torq
ue [
Nm
]
time [sec]
10-1
100
101
102
103
104
10-4
10-3
10-2
10-1
100
101
Frequency (Hz)
Z-Torq
ue [
Nm
]
0 1 2 3 4 5 6 7 8 9 10
-3
-2
-1
0
1
2
3
Z-T
orqu
e [N
m]
time [sec]
10-1
100
101
102
103
104
10-5
10-4
10-3
10-2
10-1
Frequency (Hz)
Z-T
orqu
e [N
m]
-
Table 2 Characteristic Frequency and Q-Factor
T_FB3_W0.001T_FB3_W0.031
6.6/0.5= 13
31.5(FlexB3 Attachment Mode)
RigidFlexB3
T_FB2_W0.001T_FB2_W0.019
3.8/0.4= 9.5
19.3(FlexB2 Attachment Mode)
RigidFlexB2
T_FB1_W0.001T_FB1_W0.013
2.4/0.08= 30
13.4(FlexB1 Attachment Mode)
RigidFlexB1
T_RGD_W3.001T_RGD_W3.7_7
2.7/0.45= 6
7.7(Flex3 Inertia Mode)
Flex3Rigid
T_RGD_W2.001T_RGD_W2.6_1
1.5/0.4= 3.8
6.1(Flex2 Inertia Mode)
Flex2Rigid
T_RGD_W1.001T_RGD_W1.3_3
1/0.5= 2
3.3(Flex1 Inertia Mode)
Flex1Rigid
T_RGD_W0.001T_RGD_W0.069
12/3= 4
69(Rigid Inertia Mode)
RigidRigid
Data FileQ Factor (Resonance Amplitude Ratio)*
Driving Pulse Rate [PPS]= Characteristic Frequency [Hz]
Inertial Load
Attachment
T_FB3_W0.001T_FB3_W0.031
6.6/0.5= 13
31.5(FlexB3 Attachment Mode)
RigidFlexB3
T_FB2_W0.001T_FB2_W0.019
3.8/0.4= 9.5
19.3(FlexB2 Attachment Mode)
RigidFlexB2
T_FB1_W0.001T_FB1_W0.013
2.4/0.08= 30
13.4(FlexB1 Attachment Mode)
RigidFlexB1
T_RGD_W3.001T_RGD_W3.7_7
2.7/0.45= 6
7.7(Flex3 Inertia Mode)
Flex3Rigid
T_RGD_W2.001T_RGD_W2.6_1
1.5/0.4= 3.8
6.1(Flex2 Inertia Mode)
Flex2Rigid
T_RGD_W1.001T_RGD_W1.3_3
1/0.5= 2
3.3(Flex1 Inertia Mode)
Flex1Rigid
T_RGD_W0.001T_RGD_W0.069
12/3= 4
69(Rigid Inertia Mode)
RigidRigid
Data FileQ Factor (Resonance Amplitude Ratio)*
Driving Pulse Rate [PPS]= Characteristic Frequency [Hz]
Inertial Load
Attachment
*: The denominator of the Q-factor is the average peak torque of
1PPS driving. The numerator is the peak torque of each resonance.
The reason being that the peak torque has steady value when it is
resonated, but less steady in case of 1PPS.
5. Effectiveness of Isolation
In this chapter, we examine the pointing stability
in case that a rigid satellite (MOI=1[kgm2]) is subject
to the disturbance of stepping motor in each test case.
Pointing stability can be characterized by ‘Amplitude
of disturbance torque’ and ‘Frequency of distur-
bance’ and ‘Time span in which pointing stability is
required’. Therefore, for the purpose of general
comparison of disturbances, we evaluate the distur-
bances using the conversion data to pointing stability.
Damping (or isolation) effect by the flexibility of
motor stator side can be summarized as follows,
• Pointing stability (Short term / middle term) � Pointing
stabilities are the same level in
each case, the reason can be supposed that
main factor of disturbance is H/D charac-
teristic mode (in case of flex inertia, it will
be flex inertia mode) and it doesn’t depend
on driving pulse rate.
• Short term pointing stability � Pointing stabilities can be
decreased in
flex attachment compared to rigid attach-
ment.
� Resonance frequency depends on the flexi-bility of each
attachment, however point-
ing stabilities are the same level in each
case.
• Middle term pointing stability � Pointing stabilities are the
same level in
each case.
� Resonance frequency depends on the flexi-bility of each
attachment, and pointing sta-
bilities will be increased in flex attachment.
7.89E-06 8.26E-069.53E-06
2.51E-06
1.13E-05
2.64E-05
3.71E-06
5.75E-06
1.53E-06
1.02E-06
2.85E-05
1.07E-06 1.06E-06
1.53E-06
4.10E-06
3.16E-06
1.33E-05
3.93E-06
3.04E-05
5.29E-06
2.20E-06
1.51E-06
5.25E-06
3.01E-06
3.92E-06 4.16E-06
2.63E-06
3.37E-05
2.50E-06
6.66E-06
4.49E-06
1.00E-06
1.00E-05
1.00E-04
1 10 100 1000
Driving Pulse Rate [PPS]
Short
Term
Poin
ting
Sta
bility
[ra
d]
Rigid
FlexB1
FlexB2
FlexB3
Fig.19. Effectiveness of Isolation by short term sta-
bility (dt=1ms)
3.77E-05 3.79E-05
4.49E-05
1.74E-05
5.64E-05
1.26E-04
2.11E-05
4.80E-05
1.89E-05
3.67E-05
1.91E-05
6.66E-04
1.98E-051.78E-05
3.36E-05
1.04E-04
5.43E-05
2.21E-04
6.58E-05
5.03E-04
8.50E-05
3.31E-052.89E-05
9.73E-05
3.19E-05
4.00E-054.64E-05
2.61E-05
3.42E-04
1.97E-05
6.09E-05 6.47E-05
1.00E-05
1.00E-04
1.00E-03
1 10 100 1000
Driving Pulse Rate [PPS]
Mid
dle
Term
Poin
ting
Sta
bility
[ra
d]
Rigid
FlexB1
FlexB2
FlexB3
Fig.20. Effectiveness of Isolation by middle term
stability (dt=37ms)
6. Identified Model
In this chapter, we propose a stepping motor
mathematical disturbance model which can be used
for system design of satellite.
As shown in the following equations and Fig.21,
mathematical model can be realized by a simple
1DOF mass-spring system.
In case of a high driving pulse rate like over
100PPS, there could be a lot of high-order flexible
modes of inertial load in general. We hereby have to
consider that this mathematical model will be inaccu-
rate when we handle the stepping motor driving dis-
turbance in condition of a high driving pulse rate.
Coupling torque to the vertical axis from the rotation
axis (Z axis) is about 3 to 7 % in many cases (single /
1 / 5 / 10 / 50PPS). However, in some high-rate
cases (20 / 100 / 256PPS), coupling torque is maxi-
mum 50 %. The reason being that a torsional mode
or a rotational axis parallel mode might be excited
and coupling torque around the other axes was in-
creased. Actually high-order flexible modes are ex-
cited in those cases. Fig.22 shows a transfer charac-
teristic of the mathematical model.
(1) Equations of inertial load
{ }
1 1 1 1 1 2 1
1 1
1
1
1 1 2 1 1 1
( ) 1,2,....
( )
i i i i i i
i i
i
i
i
i i i i
i
I D K i
I
I
T K D
θ θ θ θθ
θ
θ θ θ
+ = − =
=
= − − −
∑∑∑
�� �
�
Mode No. of Inertial Load
Pointing Error of Inertia C.M.
Reaction Torque from Inertia to H/D
(2) Equations of H/D mechanism
{ }2 2 2 2 2 3 2 1
2 2 3 2 2 2 Reaction Torque from H/D to Attachment
ˆ( )
ˆ( )
I D K T
T K D
θ θ θ θ θ
θ θ θ θ
+ = + − + = − + − −
�� �
�
(3) Equations of motor attachment
( )
3 3 3 3 3 3 2
3 3
3
3
3
2 2
3
3 3 3 3 3
1,2,....
1,2,....
j j j j j j j
j j
j
j
j
j
j
k
k
j j j j
j
I D K T j
I
I
IT T k
I
T K D
θ θ θθ
θ
θ θ
+ = − + =
=
= =
= − − −
∑
∑
∑∑
�� �
�
Mode No. of Attachment
Pointing Error of Attachment C.M.
Mode No. of Attachment
Reaction T
orque from Attachment to Stator Side
where,
-
1 2 3, ,
ˆ
2
1, 2,3
1, 2,....
i i
mn m mn mnD I K
m
n
θ θ θθ
ζ===
No. of the Object
Mode No. of the Object
:Angle at Inertial Cordinate System
:Quantized Input Angle
I11 I12 I13
K11 K12 K13D11 D12 D13
I2 H/D Output Axis
K2 D2
I31I32
I33
K31
K32
K33
D31
D32
D33
C.M.
θ1
C.M.
θ3
θ2
C.M.θ̂
Input Angle(Quantized Input)
Inertial L
oad
(Fle
x)H
/D
Attac
hm
ent (
Fle
x)
Fig.21. Mathematical Disturbance Model Schematic
Fig.22. Transfer Characteristic of Stepping Motor
Mathematical Disturbance Model
7. Comparison between Identified Model and Test
To confirm the effectiveness of the proposed
mathematical model, we show Fig.23 and Fig.24 in
which pointing stabilities calculated by test data and
model simulation are shown. The pointing stabilities
are calculated in case of a rigid satellite (MOI = 1
[kgm2]).
We confirmed that the mathematical model can be
well identified to the test data when the damping
ratio of inertial load and H/D are both set to 0.02.
Comparison between Type-3 Test Data and Identified Mathematical
ModelShort Term Pointing Stability
1.57E-05
3.29E-05
5.63E-06 5.85E-06 6.19E-06
1.11E-05
2.19E-05
4.96E-05
4.66E-06
3.52E-05
2.47E-05
4.66E-06
3.34E-06
4.80E-06
1.19E-05
2.15E-05
6.33E-05
1.00E-06
1.00E-05
1.00E-04
1.00E-03
1 10 100 1000
Driving Pulse Rate [PPS]
Short
Term
Poin
ting
Sta
bilit
y [r
ad/dt
1 s
ec, P
-P]
MOOG Type-3
Identified Model
Fig.23. Comparison between Type-3 Test Data and
Identified Mathematical Model
(Short Term Pointing Stability)
Comparison between Type-3 Test Data and Identified Mathematical
Model
Middle Term Pointing Stability
1.43E-03
2.95E-03
7.96E-04 8.62E-04 8.16E-04
1.13E-03
2.47E-03
5.13E-03
4.24E-04
3.09E-03
2.16E-03
3.84E-04
2.90E-04
5.61E-04
1.40E-03
2.86E-03
6.96E-03
1.00E-04
1.00E-03
1.00E-02
1.00E-01
1 10 100 1000
Driving Pulse Rate [PPS]
Mid
dle
Ter
m P
ointing
Sta
bilit
y [r
ad/dt
2 se
c, P
-P]
MOOG Type-3
Identified Model
Fig.24. Comparison between Type-3 Test Data and
Identified Mathematical Model
(Middle Term Pointing Stability)
7. CONCLUSION
A stepping motor mathematical disturbance model
was proposed. The effectiveness of the mathematical
model was confirmed by the comparison between
test data and model simulation on pointing stability
basis. The mathematical model is constructed only
by identification of some representative parameters
such as H/D torsional stiffness and flexibility of iner-
tial load.
REFERENCES Kamiya, T., Kurii, T. and Kawakatsu, Y.: On the
Internal Disturbance Control and Pointing Accu-
racy of SELENE Satellite, Proceedings of the
45th Space Sciences and Technology Conference.
JSASS, 2001
Kamiya, T., Kurii, T., Kawakatsu, Y.: Microvibration
Management and Pointing Stability Analysis of
SELENE Satellite, Proceedings of the 16th
IFAC Symposium, Saint-Petersburg, Russia,
Volume 1, P.143-148., 14-18 June, 2004
10-1
100
101
102
103
104
-200
-150
-100
-50
0
50Bode Diagram
Mag
nitu
de (
dB)
10-1
100
101
102
103
104
-400
-350
-300
-250
-200
-150
-100
-50
0
Phas
e (d
eg)
Frequency (Hz)