Embed Size (px)
DESCRIPTION
The root locus technique 1.Obtain closed-loop TF and char eq d(s) = 0 2.Re-arrange to get 3.Mark zeros with “o” and poles with “x” 4.High light segments of x-axis and put arrows 5.Decide #asymptotes, their angles, and x-axis meeting place: 6.Determine jw-axis crossing using Routh table 7.Compute breakaway: 8.Departure/arrival angle:
Citation preview

Steady-state tracking & sys. typesG(s) C(s)+
-r(s) e y(s)
plant
1 01 1
1 1
0 0 0
0 1 0 1
0 1 2
TF from e to for r is
System type #factors of s in d(s) Type 0: 0, 0, /
Type 1: 0, 0, , 0, /
Type 1: , 0, 0,
e r ol
mm
n n N Nn N N
v a p
p a v
p v
G G
b s b s bs a s a s a s
Na K K K b a
a a K K K b a
a a a K K
0 2, /aK b a
controller0
0
2
0
1lim ( ); to step1
1lim ( ); to ramp
1lim ( ); to acc
p e r sssp
v e r sssv
a e r sssa
K G s eK
K sG s eK
K s G s eK

1 2
20
20 0
TF from to : ( ) ( ); TF from to : ( ) ( );
( ) 1; if is step: 1 / 2 ( ) 1 / (0) (0)
1 1if is ramp: ; if is acc: (0) | (0) |
e d d e
sse B e Bs
e B s e B s
e d G s G s d e G s G s
sd se dG G s G G
d dsG s G
G1(s)+
-r(s) e
G2(s)
d(s)
AB
y(s)Type w.r.t. d
1# factor in ( ).e dG ss
Type 0 rejects nothing, has finite to step d, to ramp or acc dType 1 rejects const d, has finite to ramp d, has to acc dType 2 rejects step or ramp d, has finite
ss ss
ss ss
ss
e ee e
e
to acc d

The root locus technique1. Obtain closed-loop TF and char eq d(s) = 02. Re-arrange to get 3. Mark zeros with “o” and poles with “x”4. High light segments of x-axis and put arrows5. Decide #asymptotes, their angles, and x-axis meeting
place:
6. Determine jw-axis crossing using Routh table7. Compute breakaway:8. Departure/arrival angle:
01)()(
1
1 sdsnK
mnzerospoles
)(/)();()()()( 11'11
'11 sdsnKsdsnsnsd
k
kk
kp ppanglezpanglem )()(
k
kk
kz pzanglezzanglem )()(

-8 -6 -4 -2 0 2 4
-6
-4
-2
0
2
4
6
Root Locus
Real Axis
Imag
inar
y Ax
is
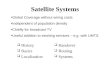
rlocus([1 3], conv([1 2 2 0],[1 11 30]))
3 2 2
3 1 0( 2 2 ) 11 30
sKs s s s s

Example: motor control
The closed-loop T.F. from θr to θ is:
PD
Plc KsKss
KsG22410
223..

What is the open-loop T.F.?The o.l. T.F. of the system is:
But for root locus, it depends on which parameter we are varying.
1. If KP varies, KD fixed, from char. poly.
sKssK
D
P
24102
23
PD KsKsssd 22410 23
012410
12 23 sKss
KD
P

The o.l. T.F. for KP-root-locus is the system o.l. T.F.
In general, this is the case whenever the parameter is multiplicative in the forward loop.
2. If KD is parameter, KP is fixedFrom
3 22 1 0
10 4 2DPK
G s
sKs s s K
022410 23 PD KsKsssd

What if neither is fixed?• Multi-parameter root locus?
– Some books do this• Additional specs to satisfy?
– Yes, typically– Then use this to reduce freedom
• The o.l. T.F. of the system is:
• It is type 1, tracks step with 0 error• Suppose ess to ramp must be <=1
sKssK
D
P
24102
23

• Since ess to ramp = 1/Kv• Kv = lim_s->0 {sGol(s)} =2KP/(4+2KD)• Thus, ess=(4+2KD)/2KP• Design to just barely meet specs: ess=1• (4+2KD)/2KP = 1• 4+2KD=2KP
0110
220)22(10
02210
022410
23
23
23
23
sssK
Ksss
KsKsssd
KsKsssd
P
P
PP
PD

>> rlocus([2 2], [1 10 0 0]);>> grid;>> axis equal;
-20 -15 -10 -5 0 5 10-15
-10
-5
0
5
10
150.220.420.60.740.84
0.91
0.96
0.99
0.220.420.60.740.84
0.91
0.96
0.99
5101520
Root Locus
Real Axis (seconds -1)
Imag
inar
y Ax
is (s
econ
ds-1
)

The grid line rays correspond to zThe semi circles corresponds to wn
If there is a design specification: Mp <= 10 %,then we need z >= 0.6
Select data point tool, and click at a point on the root locus with z >= 0.6

-5 -4 -3 -2 -1 0
-1.5
-1
-0.5
0
0.5
1
1.50.250.50.680.80.880.94
0.975
0.994
0.250.50.680.80.880.94
0.975
0.994
12345
System: sysGain: 7.84Pole: -0.827 + 1.09iDamping: 0.603Overshoot (%): 9.29Frequency (rad/s): 1.37
Root Locus
Real Axis (seconds -1)
Imag
inar
y Ax
is (s
econ
ds-1)

Desired KP = 7.84Closed loop dominant pole at -0.827+-1.09iPole damping ratio is 0.603Undamped frequency is 1.37Estimated overshoot is 9.29%

• With KP = 7.84• Design specs for ess=1 required
4+2KD=2KP• KD=KP-2 = 5.84
3 2
3 2
10 4 2 2
10 15.68 15.68D Pd s s s K s K
s s s
>> roots([1 10 15.68 15.68])ans = -8.3464 + 0.0000i -0.8268 + 1.0932i -0.8268 - 1.0932i

• Closed loop TF is:
3 2
3 2
210 4 2 2
15.6810 15.68 15.68
Pcl
D P
cl
KG ss s K s K
G ss s s
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
1.2
1.4
System: sysTime (seconds): 3.01Amplitude: 1.09
Step Response
Time (seconds)
Ampl
itude
>>max(y)
ans =
1.0915
Actual Mp=9.15%

More examples1.
No finite zeros, o.l. poles: 0,-1,-2Real axis: are on R.L.Asymp: #: 3
021 Ksss
0121
1
sssK
3 21 11, 3 2n s d s s s s
0,1&2,
13
021
3,: e

-axis crossing:char. poly: Ksss 23 23
wj
21:3sKs 3:2
361 : Ks
Ks :0
60set 36 KK
633: 222 sKssAs 223 2,1
2 jss
2at axis- cross R.L. ,6at jjK w

-8 -6 -4 -2 0 2 4-5
-4
-3
-2
-1
0
1
2
3
4
50.220.420.60.740.84
0.91
0.96
0.99
0.220.420.60.740.84
0.91
0.96
0.99
2468
Root Locus
Real Axis
Imag
inar
y A
xis
>> rlocus(1,[1 3 2 0])>> grid>> axis equal

Example:
Real axis:(-2,0) seg. is on R.L.
0222 2 Kssss
43,
41,4Asymp# e
01222
12
ssssK
zeros no ,11 sn
22s2 21 ssssd
1120:poles j,-,-
2or 0for compute toneed No dep

For ,1 j
iidep
43
24
2from-
j-
1from
0from
2
jj
1 from up vert.going R.L. symmetry,By 1 fromdown vert.going R.L.

Break away point: sssssd 464 234
1
0 so 1 '11 sdsn
412124' 231 ssssd
1334 23 sss
314 s
poly. char.for root quadruple isit
0'for root tripleis 1 1 sds
out.split and 1at meet branches R.L. 4 s
each. 45 into 360 dividing
out, 4 andin branches 4

-axis crossing:char. poly: Kssss 464 234
wj
113 44:s
21
2 2: KKs
21:1 Ks
2:0 Ks
202
1set KK
012
: 222 sKssAs js
jjK at axis- cross R.L. ,2at w
Ks 61:4

-4 -3 -2 -1 0 1 2-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0.96
0.99
0.220.420.60.740.84
0.91
0.96
0.99
0.511.522.533.54
0.220.420.60.740.84
0.91
Root Locus
Real Axis
Imag
inar
y A
xis
>> rlocus(1, conv([1 2 0], [1 2 2]))>> axis equal>> sgrid

Example: in prev. ex., change s+2 to s+3
01223
12
ssssK
45
4113
43,
4: e
j 1,3,0:poleszeros no
R.L.on is seg 1,3:axis Real
4 :Asymptotes #

need. no :3,0for depjdep 1for
i-dep
43
221tan 1-
21tan
41-
symmetry.by of neg is 1for jdep
0 :pointsaway Break sd
0616154 23 ssssd
R.L.on 6.2at solution One?
s

-axis crossing:char. poly:
Kssss 685 234
wj
65:3s
Ks5
34:2
534
534
1 56:
Ks
Ks :0
55634
534 056set
KK
56
556342
5342 0: jsss
56
25634 at axis- cross R.L. ,at jjK w
Ks 81:4

-10 -8 -6 -4 -2 0 2 4 6 8-8
-6
-4
-2
0
2
4
6
80.220.420.60.740.84
0.91
0.96
0.99
0.220.420.60.740.84
0.91
0.96
0.99
246810
Root Locus
Real Axis
Imag
inar
y A
xis
>> rlocus(1, conv([1 3 0], [1 2 2]))>> axis equal>> sgrid