Embed Size (px)
DESCRIPTION
Statistical modeling, classification, and sensor management. DARPA-MURI Review 2003. Alfred Hero Univ. Michigan Ann Arbor. Target Search Scenario. HighRes Spot Scan. LowRes Spot Scan. Strip Scan. Sensor Deployment Architecture. Our Research themes:. Sequential Sensor Management. - PowerPoint PPT Presentation
Citation preview
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Statistical modeling, classification, and sensor management
Alfred Hero
Univ. Michigan
Ann Arbor
DARPA-MURI
Review 2003
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
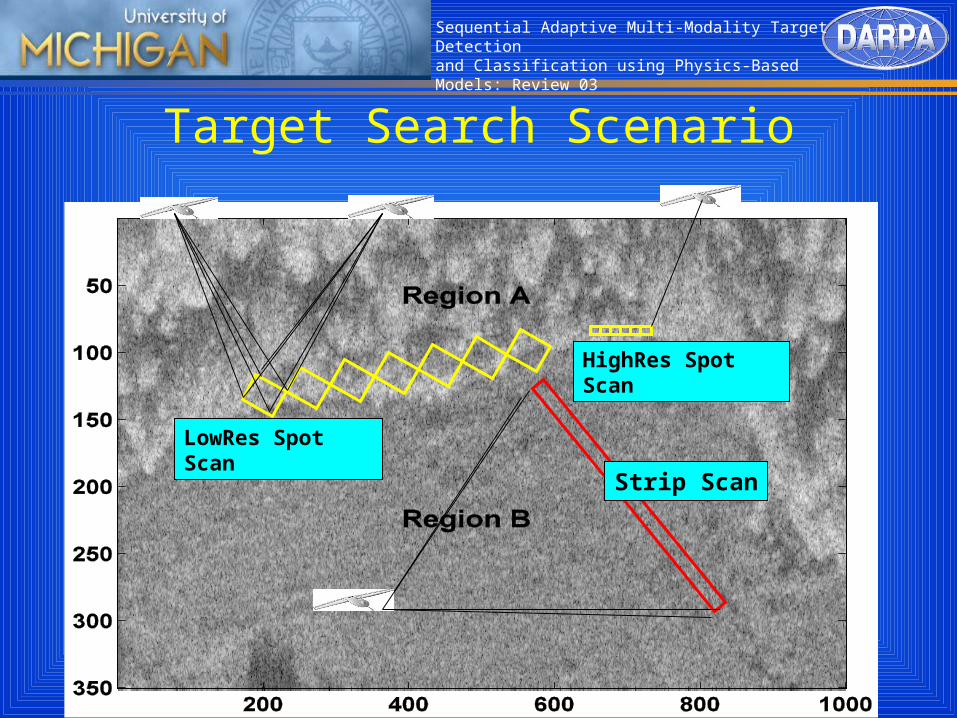
Target Search Scenario
LowRes Spot Scan
Strip Scan
HighRes Spot Scan
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
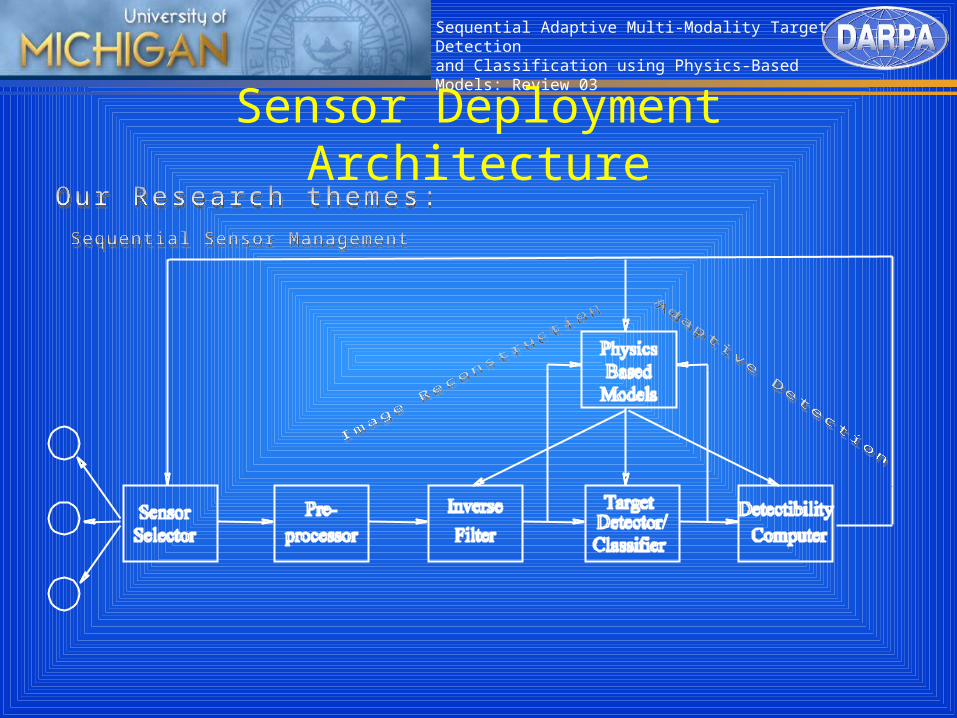
Sensor Deployment Architecture
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Research Loci• Image modeling and reconstruction
– Markov random field (MRF) polarimetric models (Hory&Blatt)– 3D Imaging with uncalibrated sensor nets (Rangarajan&Patwari)
• Adaptive detection and classification– Pattern matching and modeling (Costa)– Distributed detection and classification (Blatt&Patwari)
• Sequential sensor management– Myopic information-driven approaches (Kreucher)– Non-myopic approaches (Kruecher&Blatt)
Common theme: adaptive robust non-parametric methods
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Detection: Target or Clutter Alone?
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Detection: Target or Clutter Alone?
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
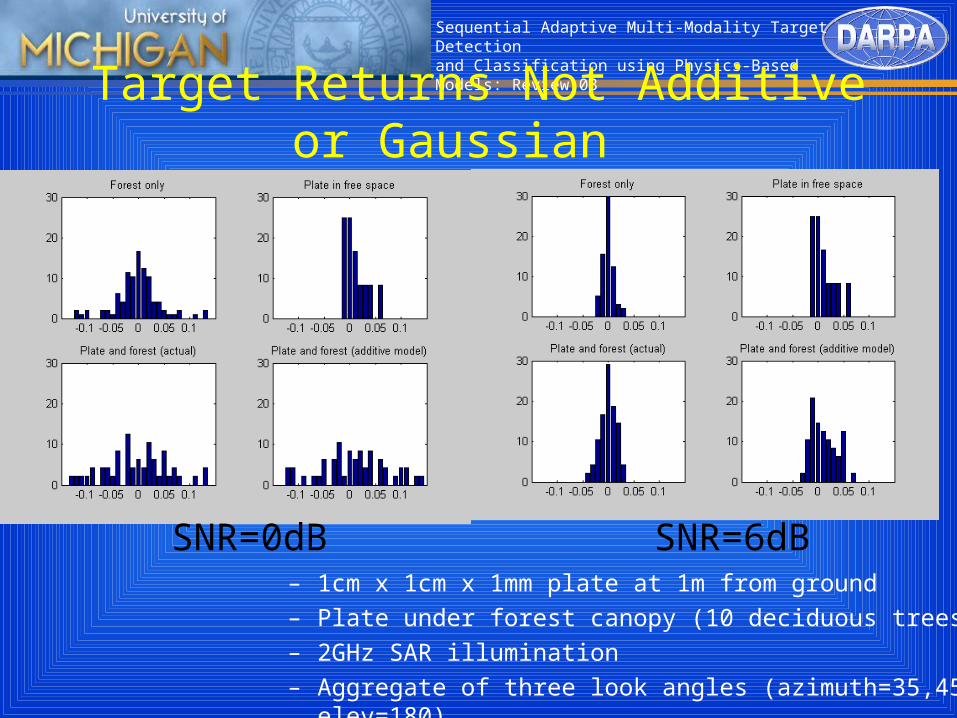
Target Returns Not Additive or Gaussian
– 1cm x 1cm x 1mm plate at 1m from ground
– Plate under forest canopy (10 deciduous trees)
– 2GHz SAR illumination
– Aggregate of three look angles (azimuth=35,45,55, elev=180)
SNR=0dB SNR=6dB
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
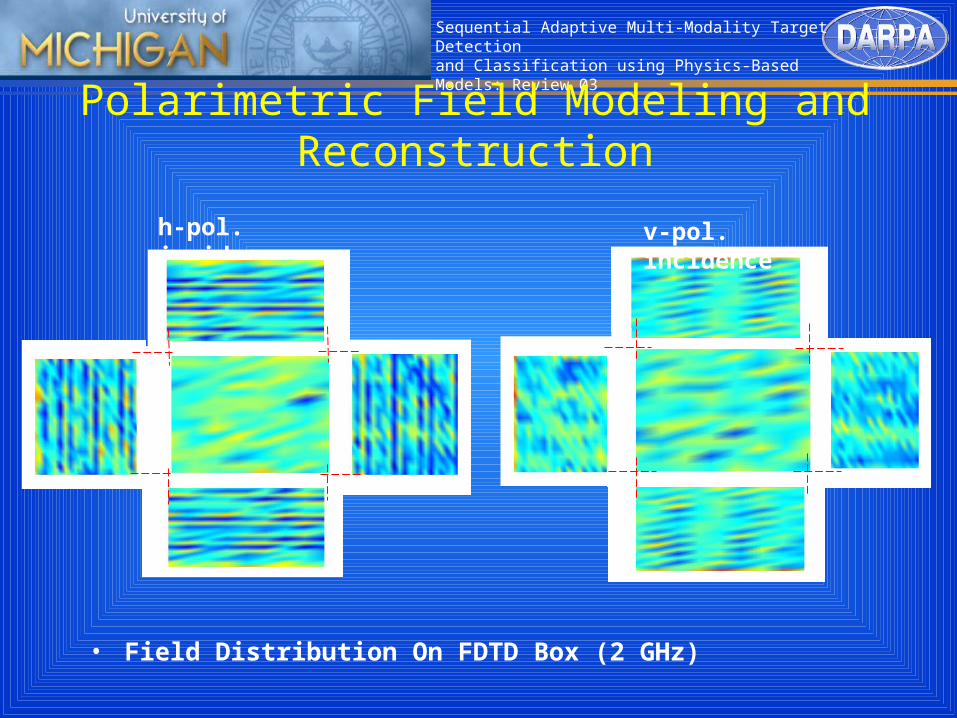
Polarimetric Field Modeling and Reconstruction
• Field Distribution On FDTD Box (2 GHz)
v-pol. incidenceh-pol. incidence
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
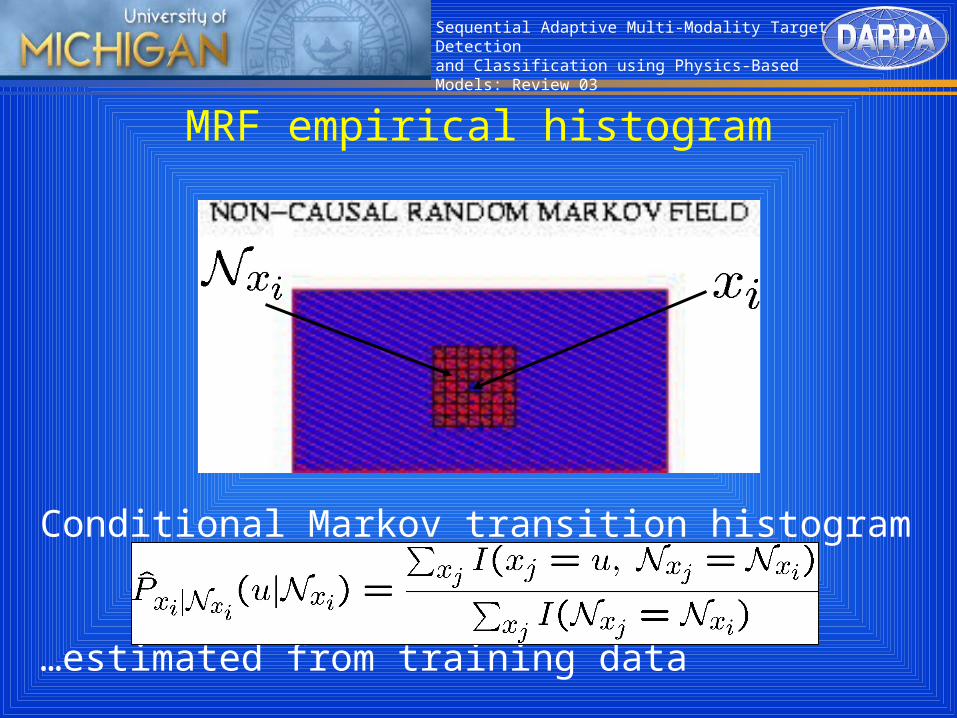
MRF empirical histogram
Conditional Markov transition histogram
…estimated from training data
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
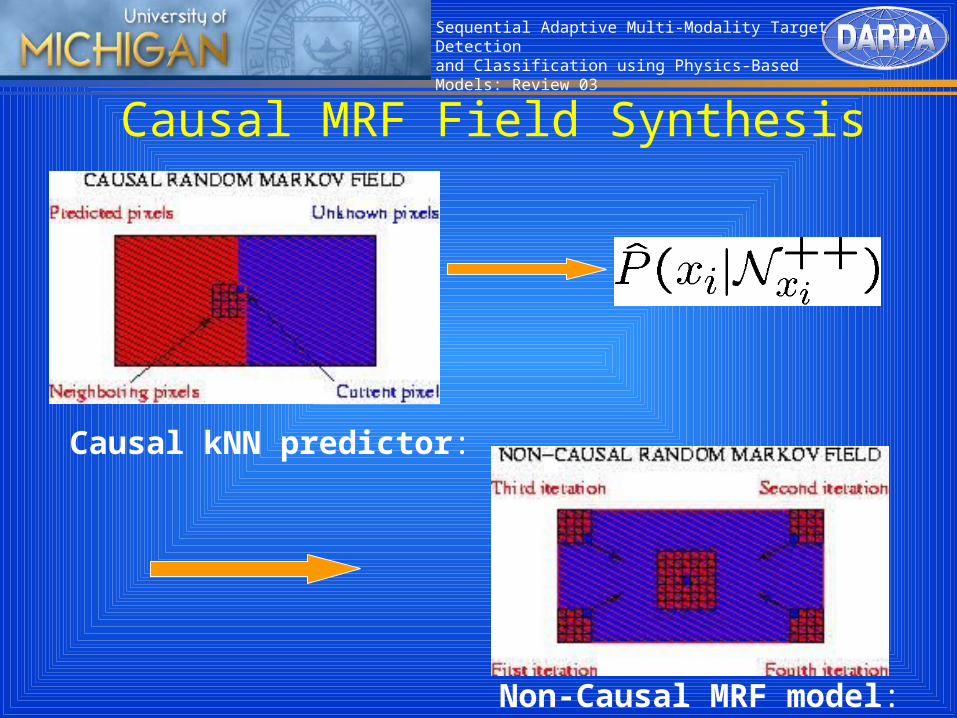
Causal MRF Field Synthesis
Causal kNN predictor:
Non-Causal MRF model:
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
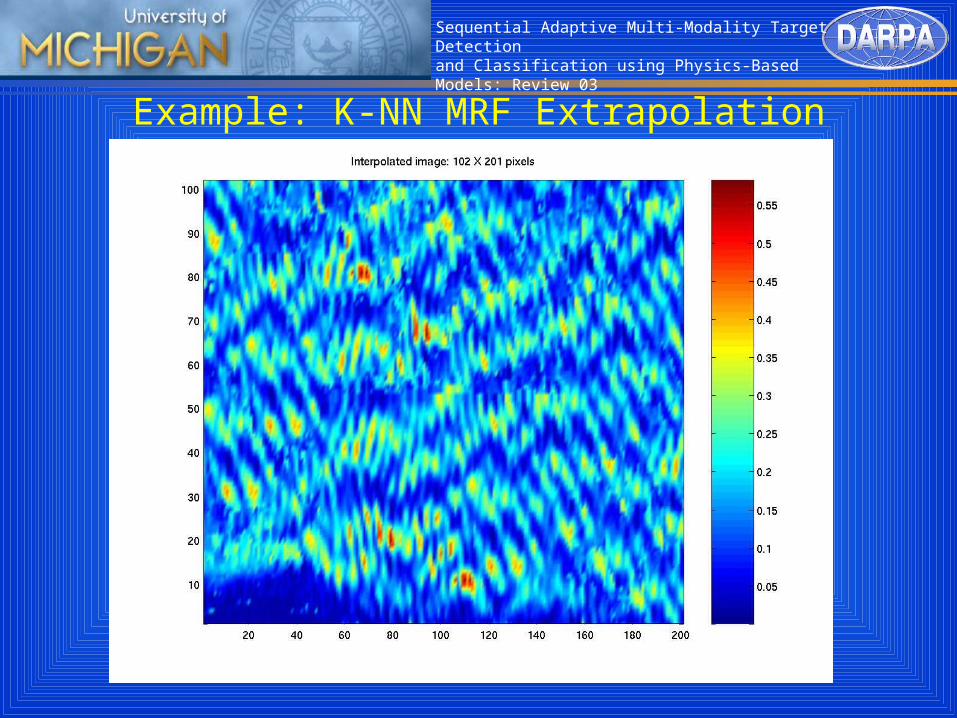
Example: K-NN MRF Extrapolation
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
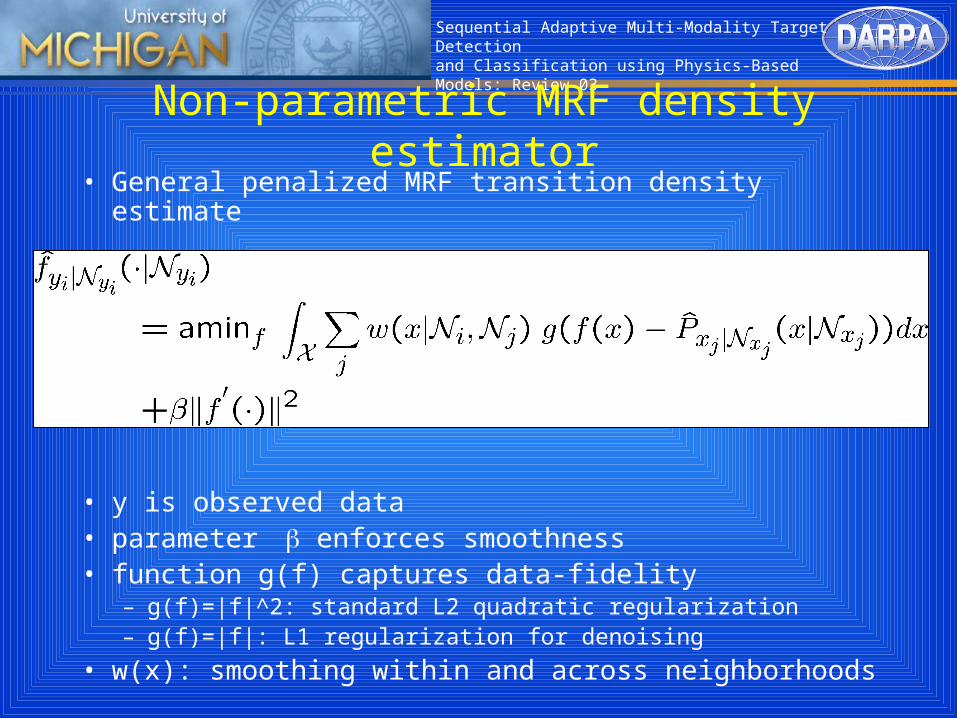
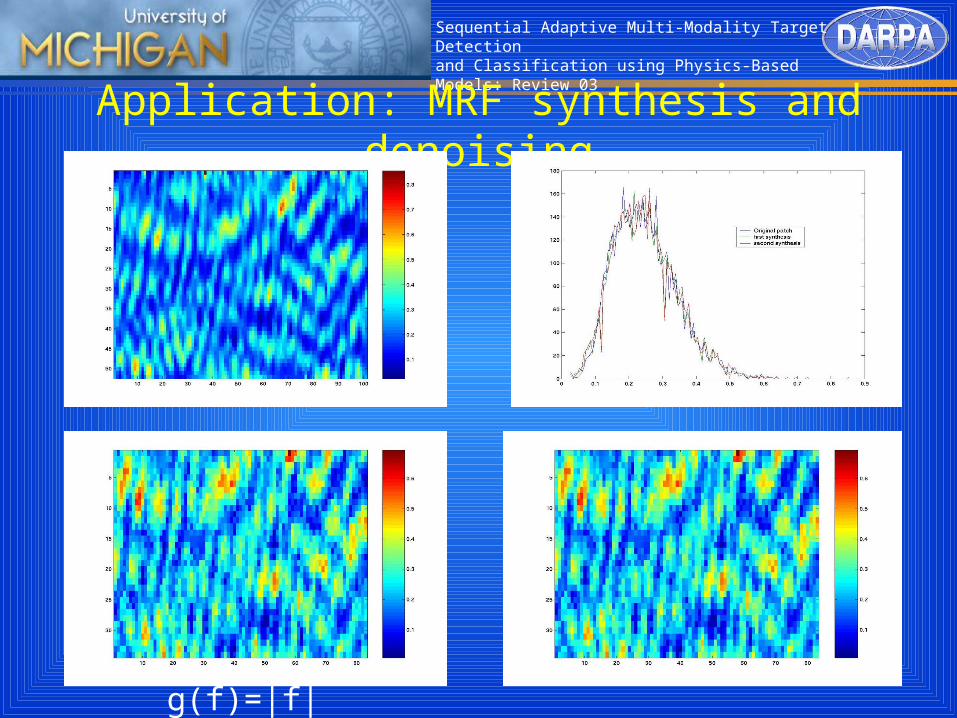
Non-parametric MRF density estimator• General penalized MRF transition density estimate
• y is observed data• parameter enforces smoothness• function g(f) captures data-fidelity
– g(f)=|f|^2: standard L2 quadratic regularization– g(f)=|f|: L1 regularization for denoising
• w(x): smoothing within and across neighborhoods

Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
)|(ˆ| iixi xNx NyP
Cartoon illustration of density estimatorK-Nearest Neighbors Estimator
),(ji xx NNd
iy~
Penalized MRF transition Density Estimator
),(ji xx NNd
)|(.ˆ| iiyi yNy Nf )|(ˆ
| iixi xNx NyP
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Application: MRF synthesis and denoising
g(f)=|f|
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Target Modeling and Classification
• Pattern matching in high dimensions– Standard techniques (histogram, density estimation) fail due to
curse of dimensionality
– Entropic graphs recover inter-distribution distance directly
– Robustification to outliers through graph pruning
• Manifold learning and model reduction– Standard techniques (LLE, MDS, LE, HE) rely on local linear
fits and provide no means of getting at sample density
– Our geodesic entropic graph methods fit the manifold globally
– Computational complexity is only n log n
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
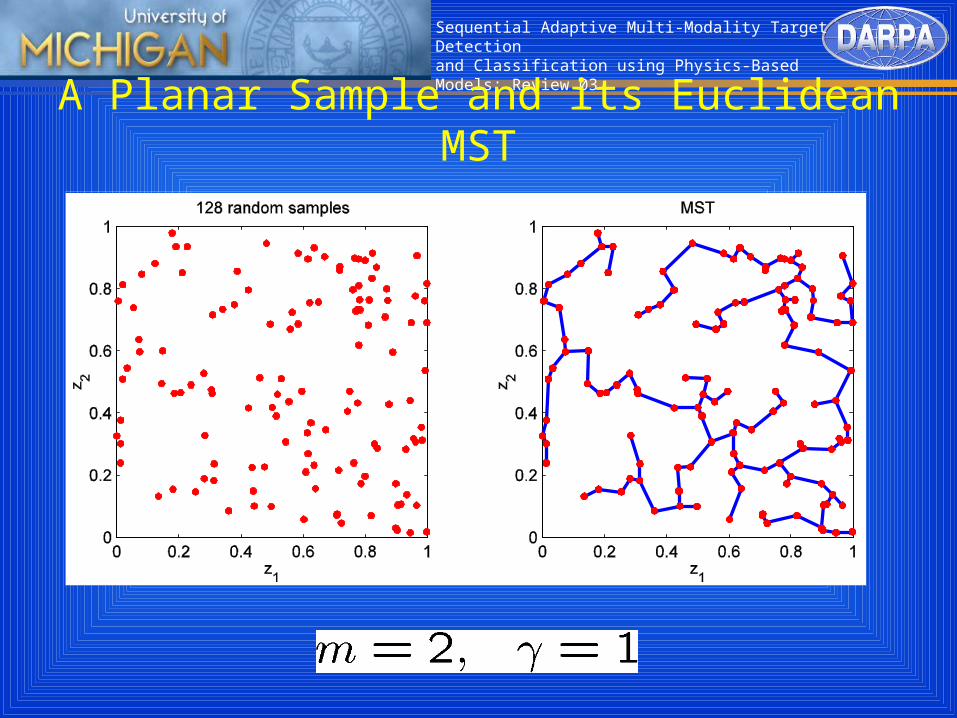
A Planar Sample and its Euclidean MST
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
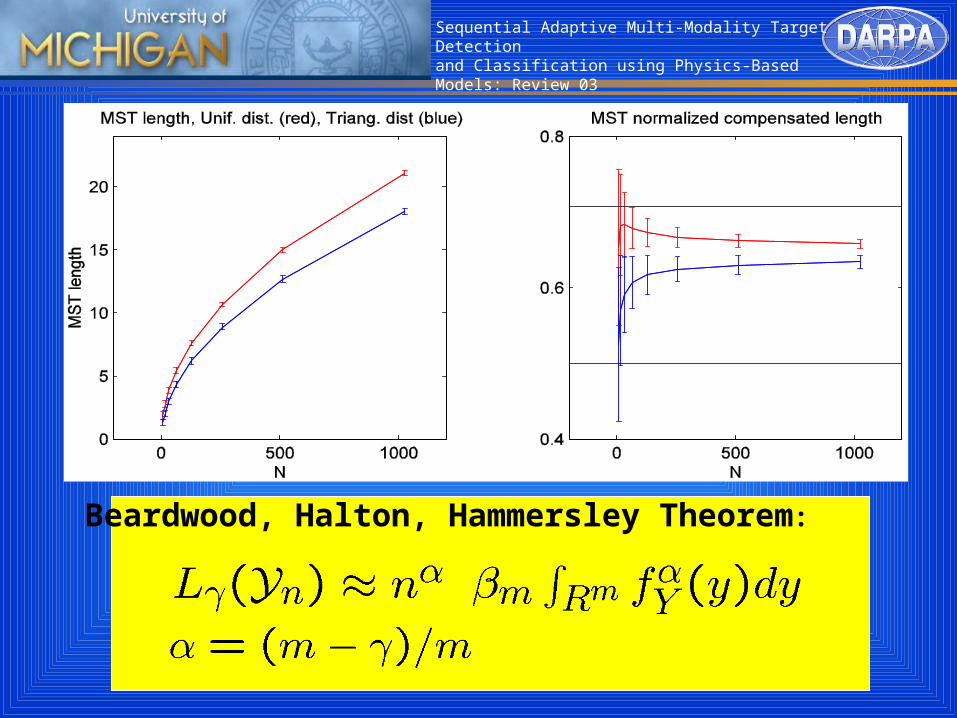
Convergence of Euclidean MST
Beardwood, Halton, Hammersley Theorem:
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
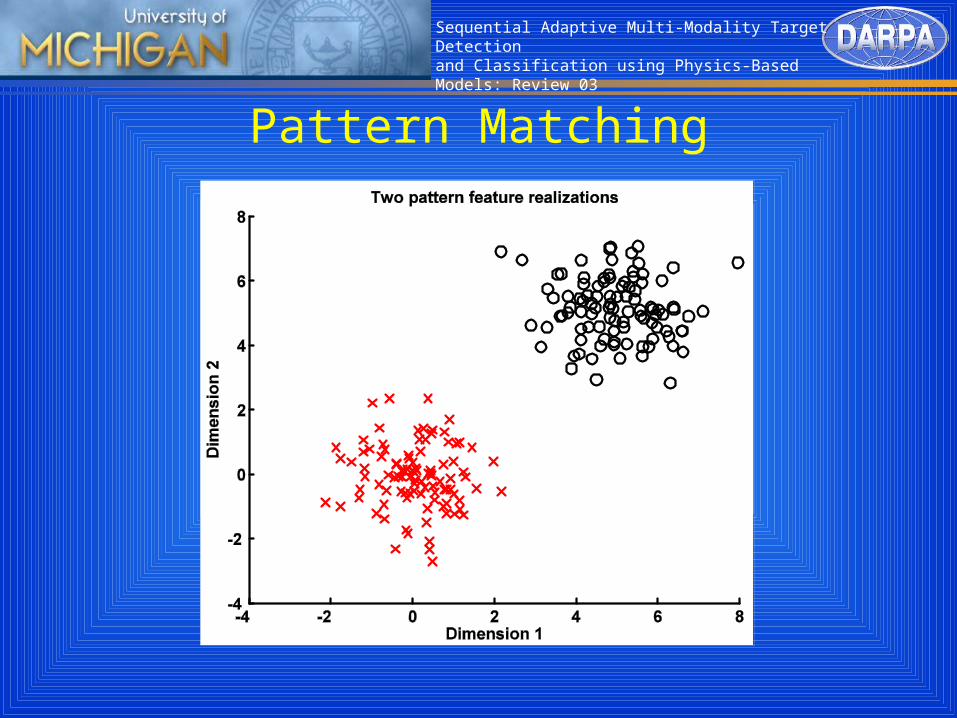
Pattern Matching
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
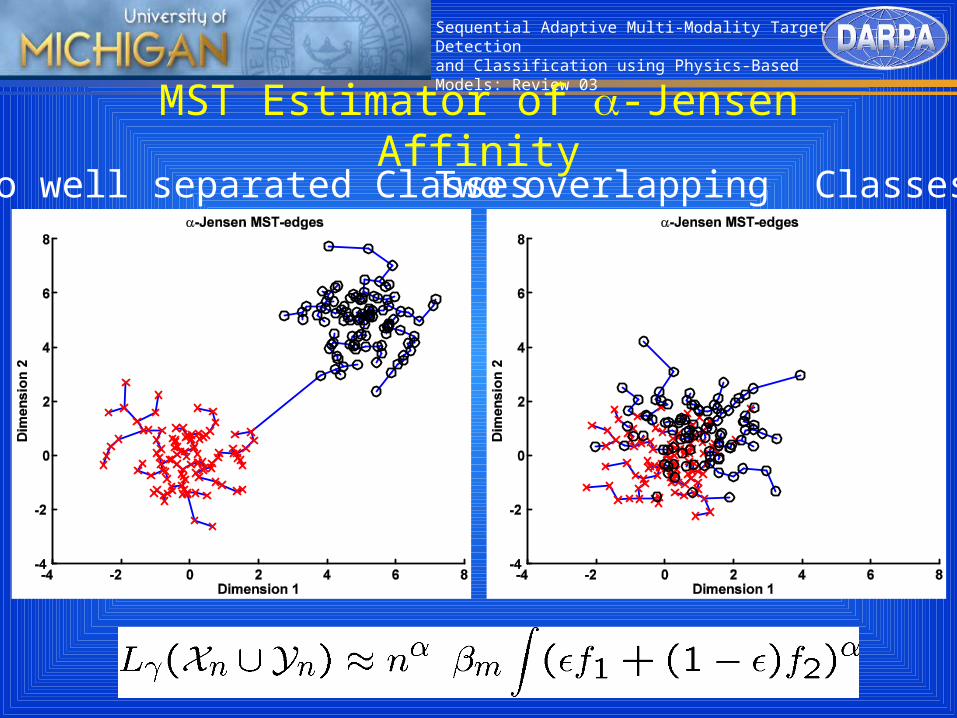
MST Estimator of -Jensen AffinityTwo well separated Classes Two overlapping Classes
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
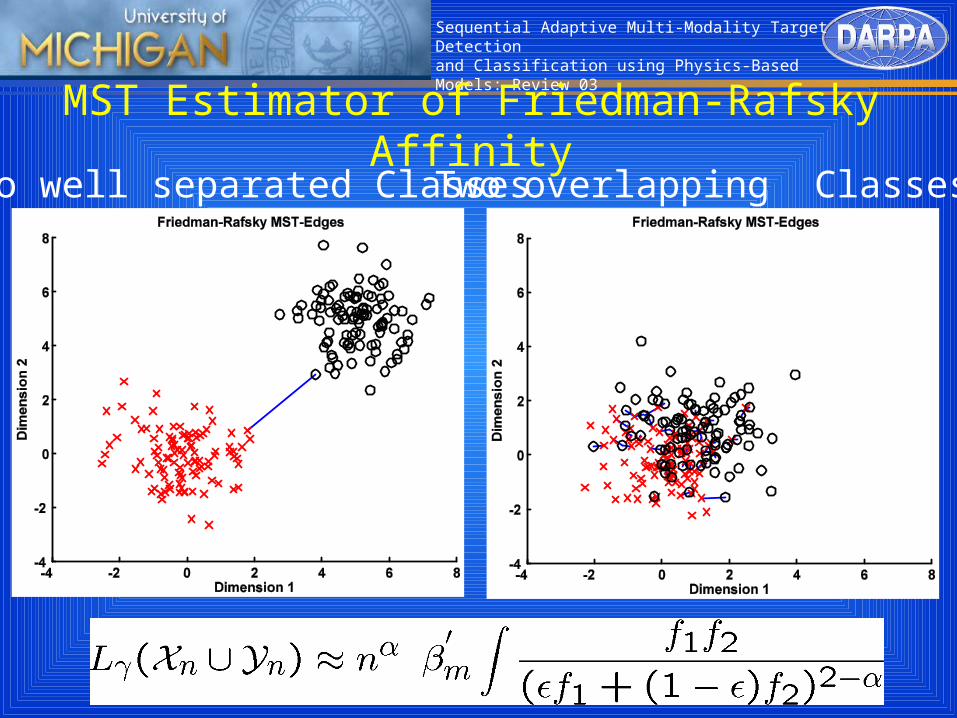
MST Estimator of Friedman-Rafsky AffinityTwo well separated Classes Two overlapping Classes
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
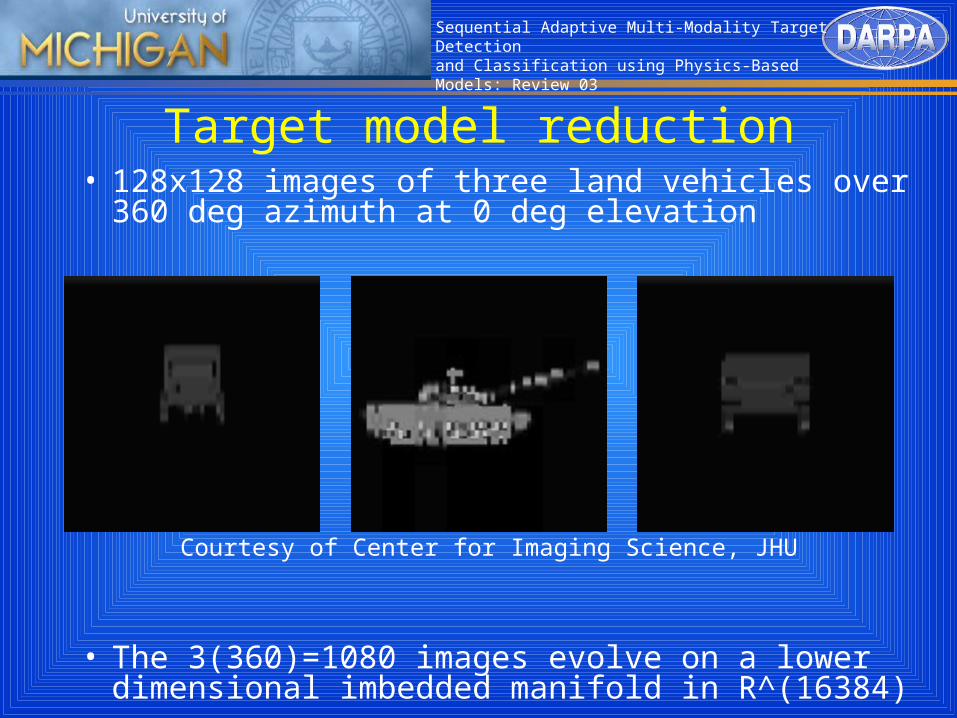
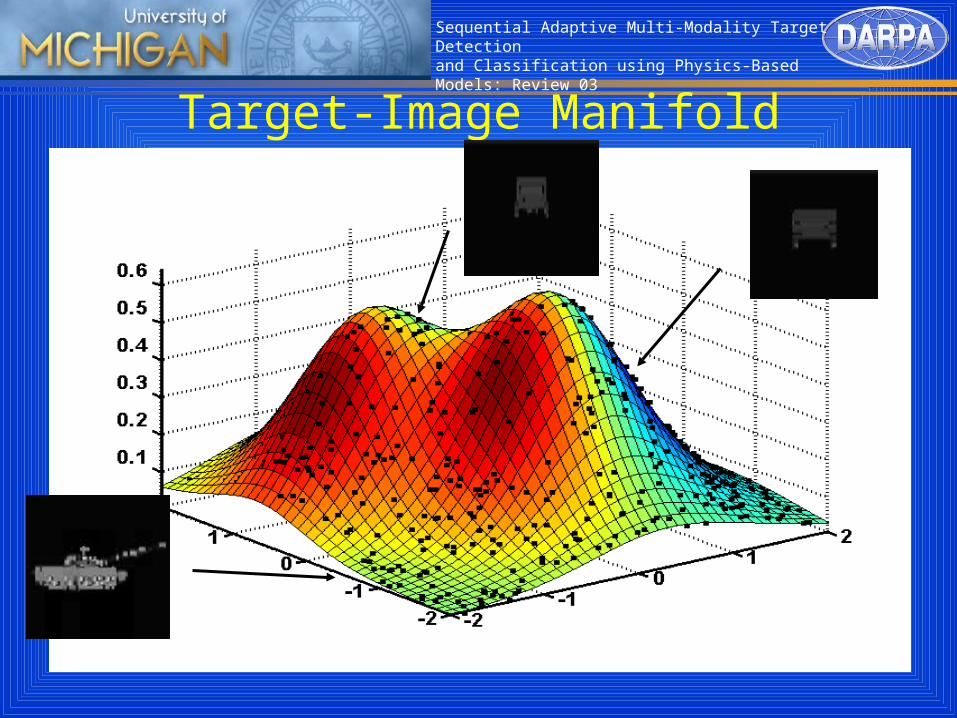
Target model reduction• 128x128 images of three land vehicles over 360 deg
azimuth at 0 deg elevation
• The 3(360)=1080 images evolve on a lower dimensional imbedded manifold in R^(16384)
Courtesy of Center for Imaging Science, JHU
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
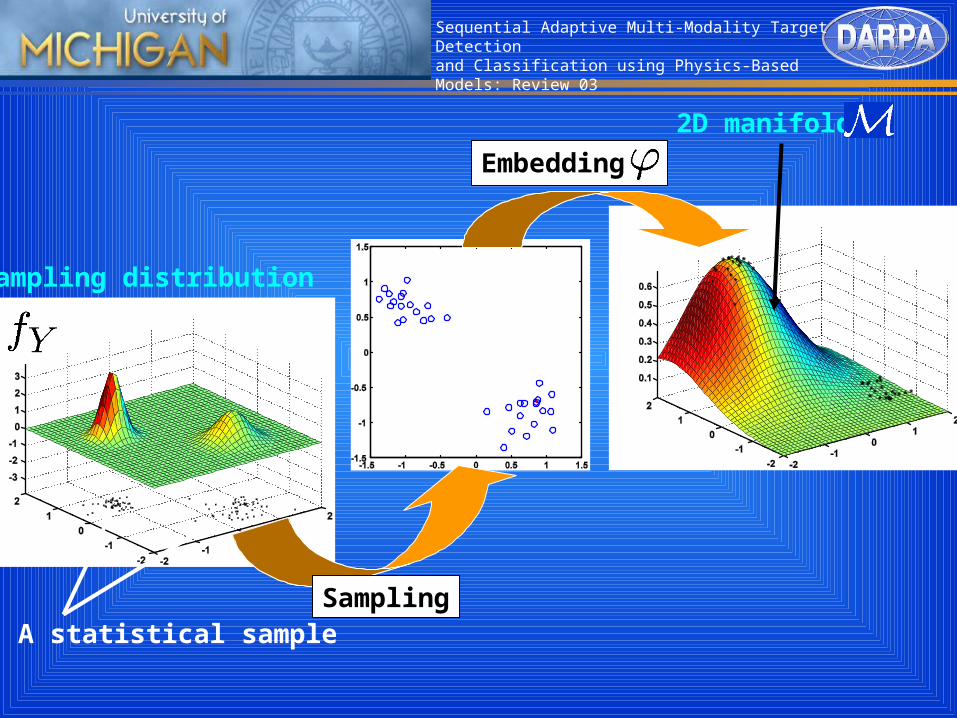
Target-Image Manifold
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
A statistical sample
Sampling distribution
2D manifold
Sampling
Embedding
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Geodesic Entropic Graph Manifold Learning and Pattern Matching Algorithm
• Construct geodesic edge matrix (ISOMAP,C-ISOMAP)• Build entropic graph over geodesic edge matrix
– MST: consistent estimator of manifold dimension and process alpha-entropy
– MST-Jensen: consistent estimator of Jensen difference between labeled vectors
• Use bootstrap resampling and LS fitting to extract rate of convergence (intrinsic dimension) and convergence factor (entropy)
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
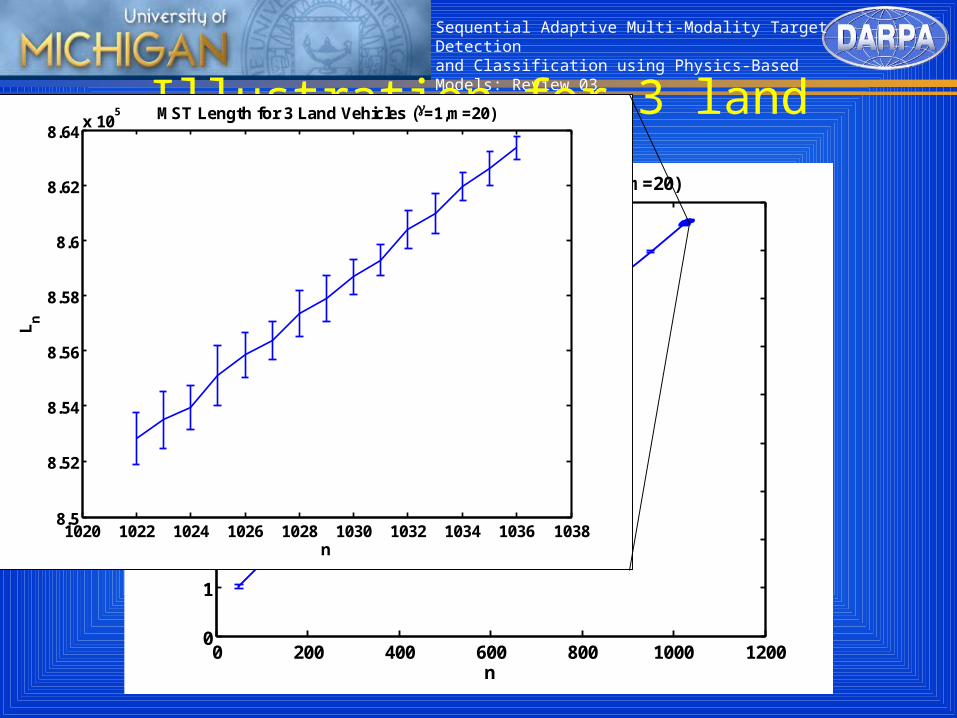
Illustration for 3 land Vehicles
0 200 400 600 800 1000 12000
1
2
3
4
5
6
7
8
9x 10
5 MST Length for 3 Land Vehicles (=1,m=20)
n
Ln
1020 1022 1024 1026 1028 1030 1032 1034 1036 10388.5
8.52
8.54
8.56
8.58
8.6
8.62
8.64x 10
5 MST Length for 3 Land Vehicles (=1,m=20)
n
Ln
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
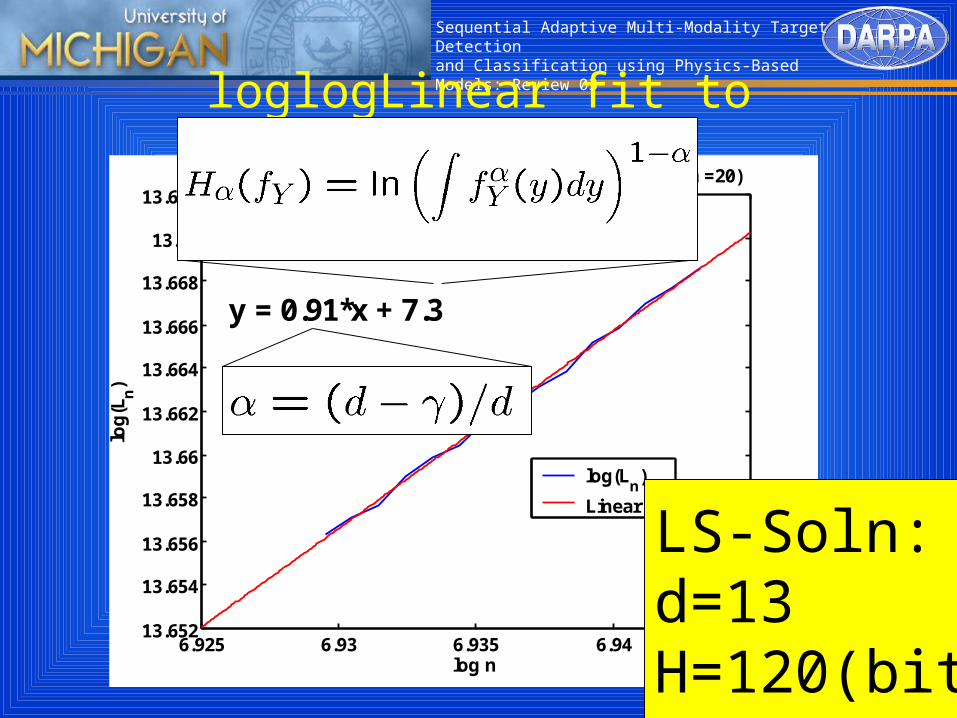
loglogLinear fit to asymptote
6.925 6.93 6.935 6.94 6.94513.652
13.654
13.656
13.658
13.66
13.662
13.664
13.666
13.668
13.67
13.672logMST Length and Linear Fit for 3 Land Vehicles (=1,m=20)
log n
log
(Ln)
y = 0.91*x + 7.3
log(Ln)
Linear fit
LS-Soln:d=13H=120(bits)_
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Distributed Multisensor Estimation and Detection
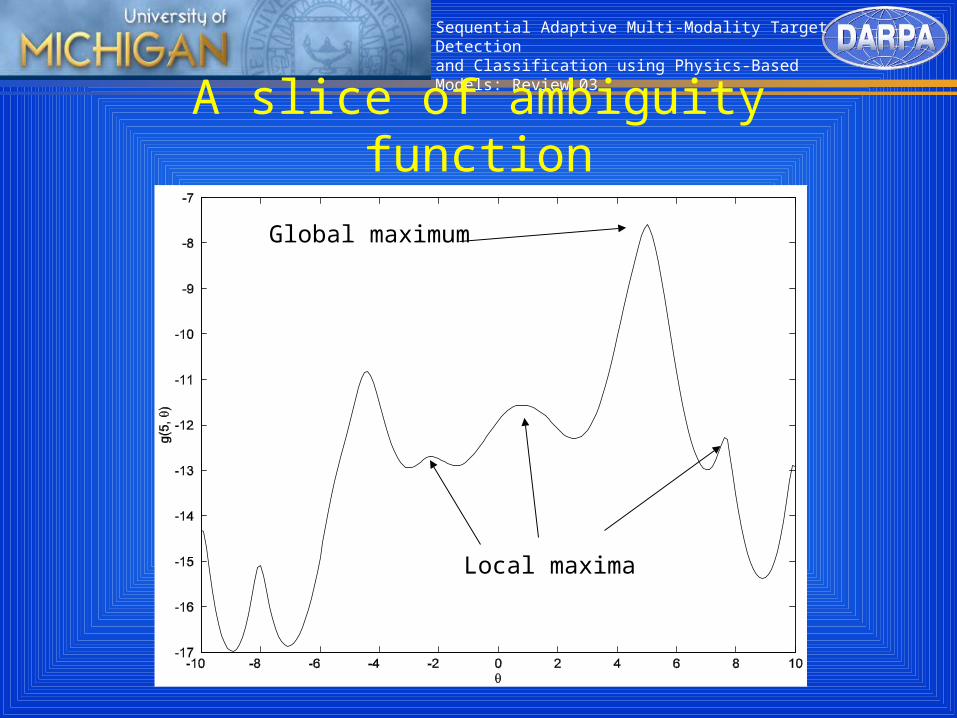
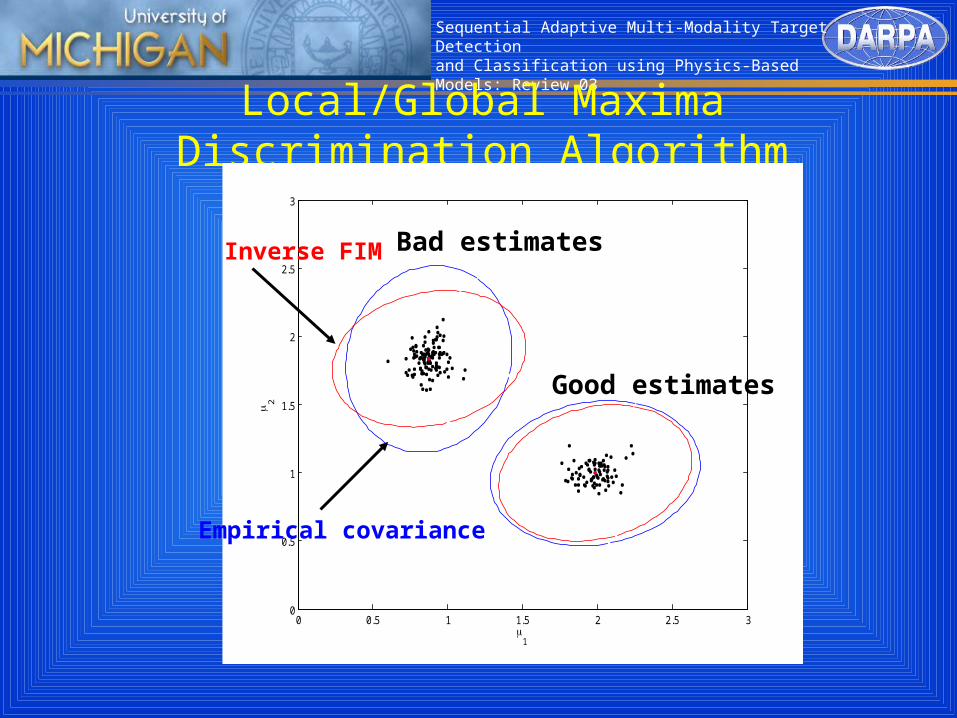
• Distributed M-estimation (Blatt)– Ambiguity function is often multimodal: local and global M
– Distributed measurements make local M more difficult
– We develop method to discriminate between local/global M
– Use unsupervised clustering and Fisher information matching
• Distributed change detection (Patwari)– Bandwidth and computation constraints
– Multilayer vs flat store-detect-forward architecture
– We study perfromance loss due to bandwidth constraints
– How much information should be sent to what layers?
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
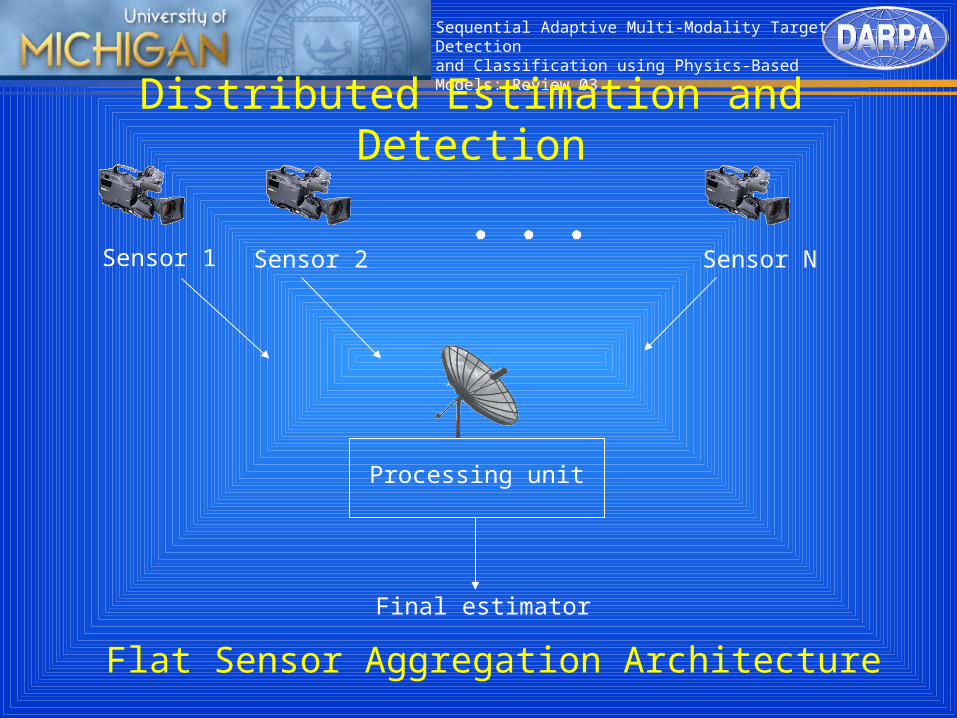
Flat Sensor Aggregation Architecture
Sensor 1 Sensor 2 Sensor N
Processing unit
Final estimator
Distributed Estimation and Detection
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
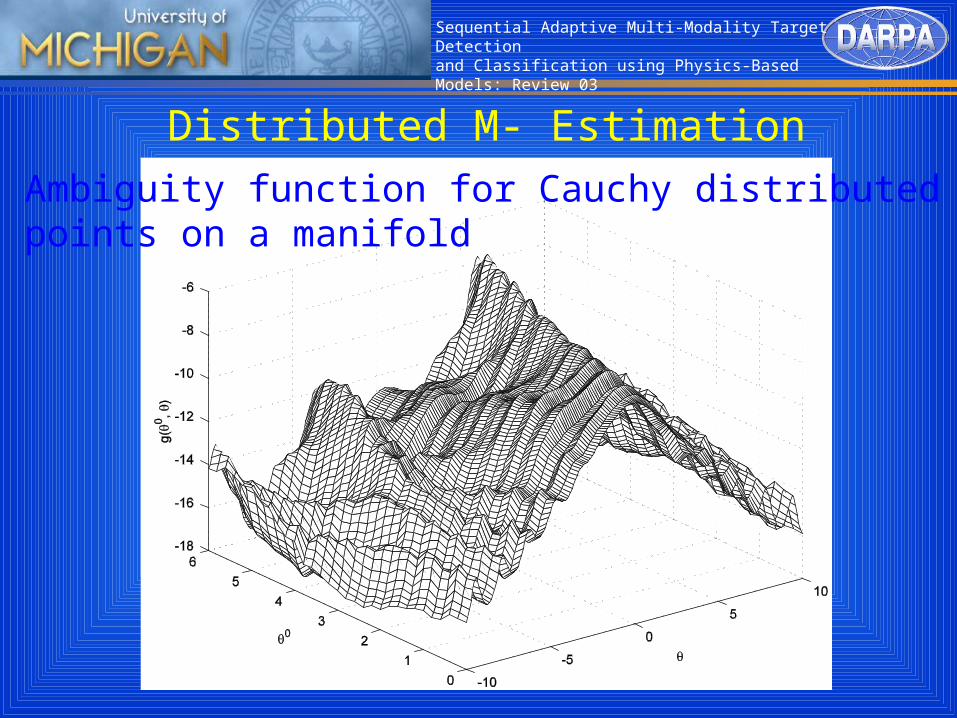
Distributed M- Estimation
Ambiguity function for Cauchy distributed points on a manifold
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
A slice of ambiguity function
Global maximum
Local maxima
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
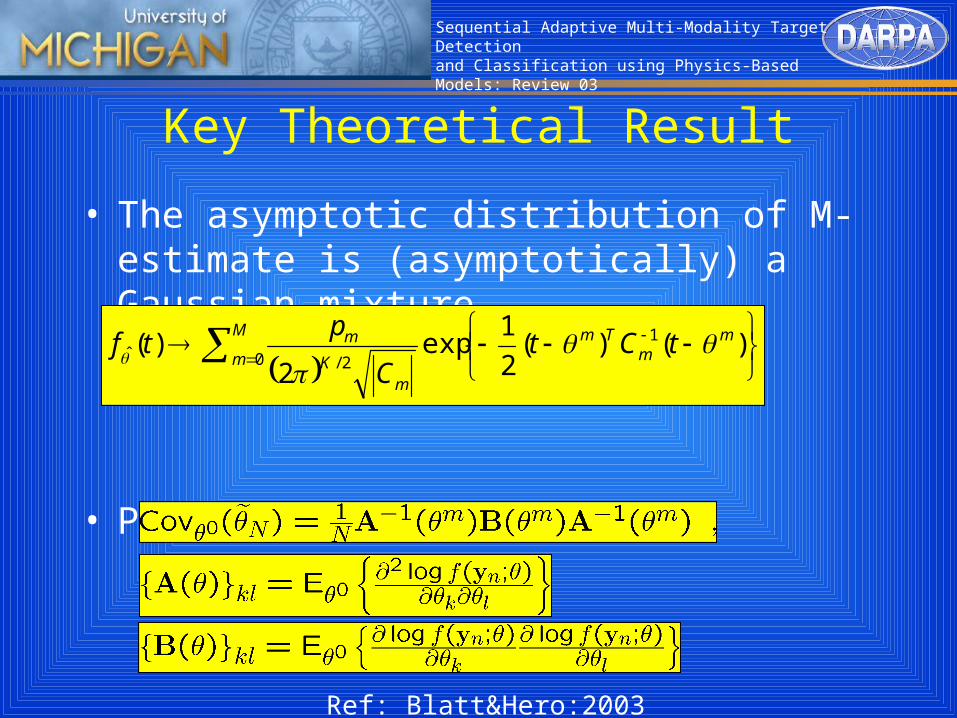
Key Theoretical Result
• The asymptotic distribution of M-estimate is (asymptotically) a Gaussian mixture
• Parameters
M
m
mm
Tm
mK
m tCtC
ptf
0
1
2/ˆ )()(
2
1exp
2)(
Ref: Blatt&Hero:2003
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
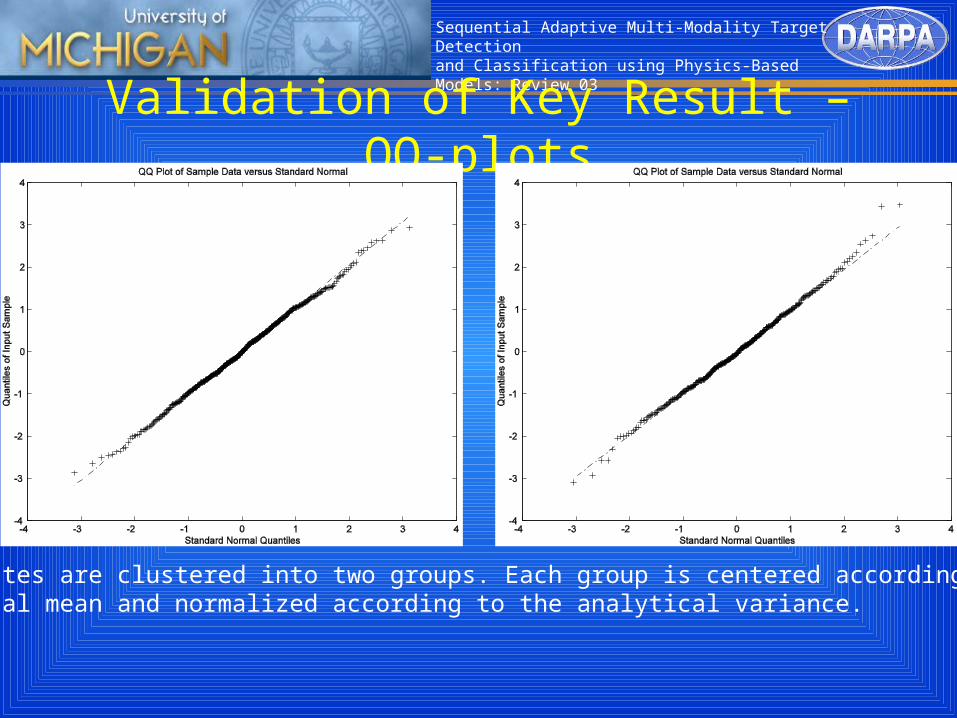
Validation of Key Result – QQ-plots
M-estimates are clustered into two groups. Each group is centered according to the analytical mean and normalized according to the analytical variance.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
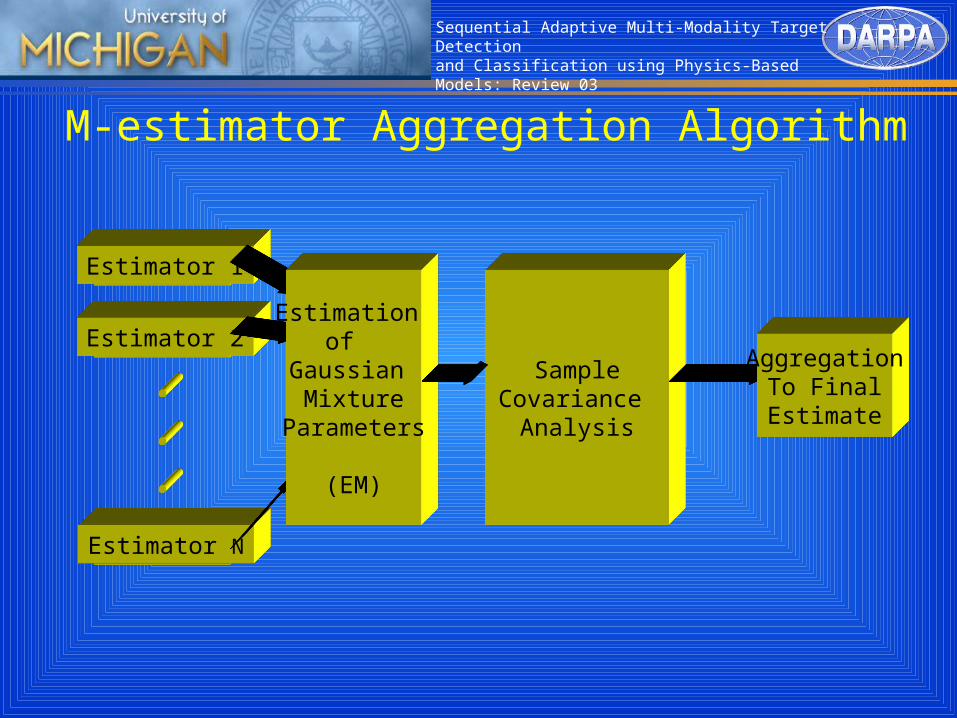
SampleCovariance
Analysis
M-estimator Aggregation Algorithm
Estimator 1
Estimator 2
Estimator N
Estimation of
Gaussian Mixture
Parameters
(EM)
AggregationTo FinalEstimate
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
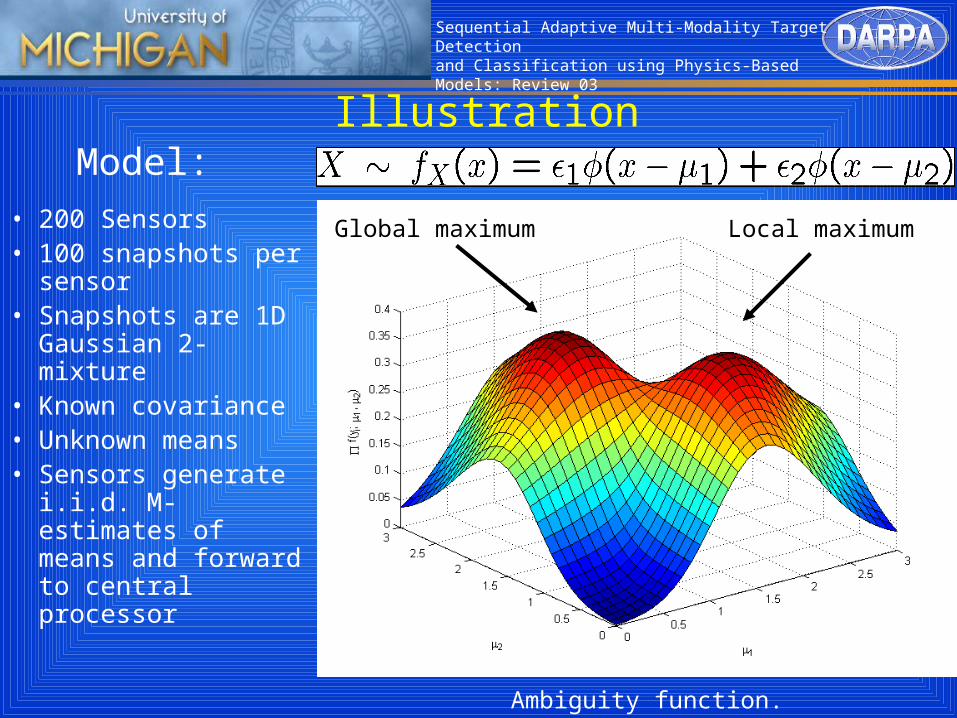
Local maximum
Ambiguity function.
Global maximum
Model:
• 200 Sensors• 100 snapshots per
sensor• Snapshots are 1D
Gaussian 2-mixture• Known covariance• Unknown means• Sensors generate
i.i.d. M-estimates of means and forward to central processor
Illustration
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Local/Global Maxima Discrimination Algorithm
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
1
2
Bad estimates
Good estimates
Empirical covariance
Inverse FIM Bad estimates
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
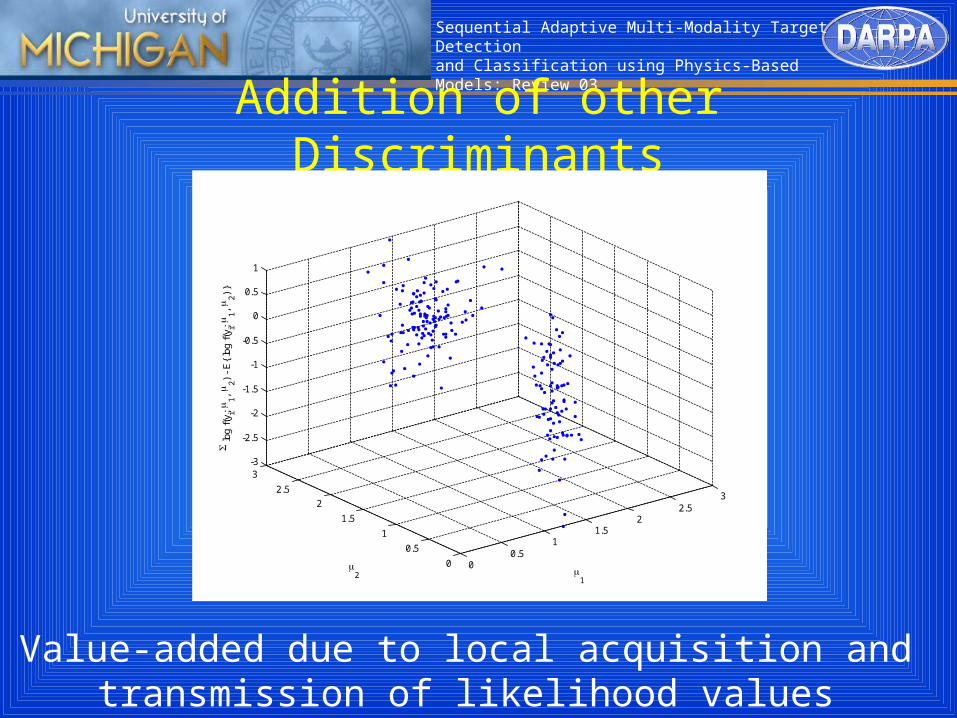
Addition of other Discriminants
00.5
11.5
22.5
3
0
0.5
1
1.5
2
2.5
3-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1
2
lo
g f(
y i; 1,
2) -
E{
log
f(y i;
1, 2)
}
Value-added due to local acquisition and transmission of likelihood values
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
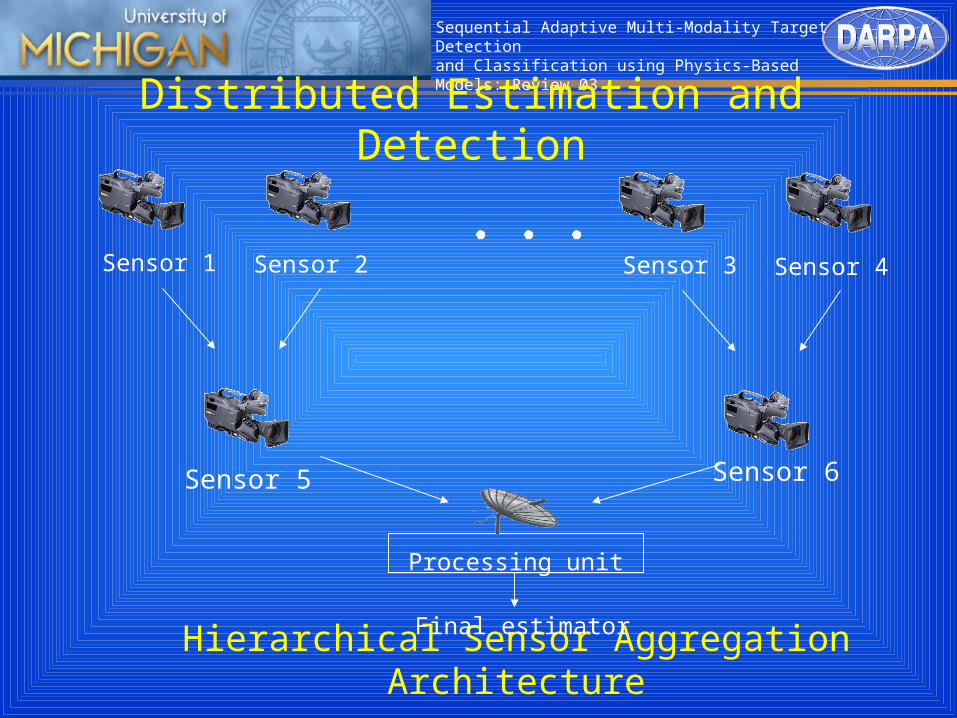
Hierarchical Sensor Aggregation Architecture
Processing unit
Final estimator
Distributed Estimation and Detection
Sensor 1 Sensor 2 Sensor 3 Sensor 4
Sensor 5 Sensor 6
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
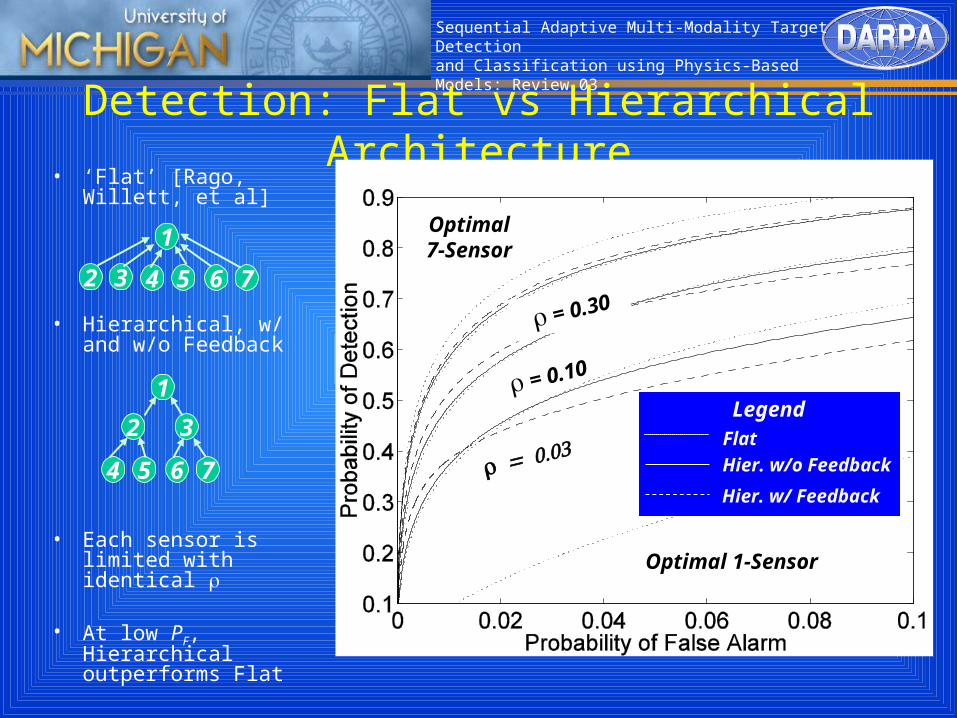
Detection: Flat vs Hierarchical Architecture• ‘Flat’ [Rago,
Willett, et al]
• Hierarchical, w/ and w/o Feedback
• Each sensor is limited with identical
• At low PF, Hierarchical outperforms Flat
Optimal 1-Sensor
Optimal 7-Sensor
= 0.30
= 0.10
= 0.03
Legend
FlatHier. w/o Feedback
Hier. w/ Feedback
2 3 6 74 5
1
2 3
6 74 5
1
Optimal 1-Sensor
Optimal 7-Sensor
= 0.30
= 0.10
LegendFlat
Hier. w/o Feedback
Hier. w/ Feedback
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
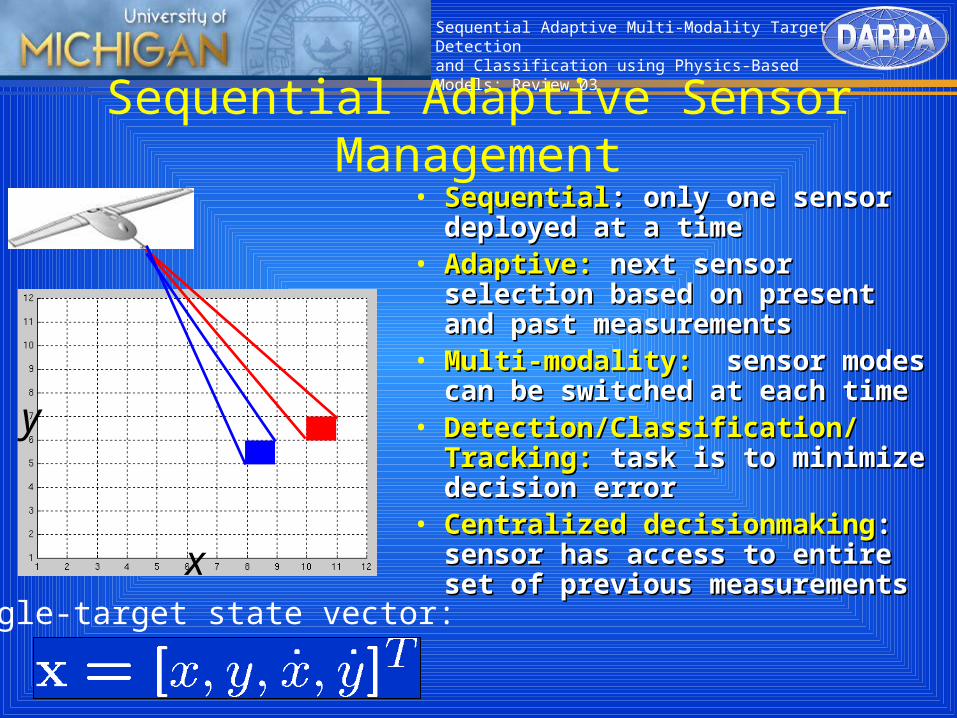
Sequential Adaptive Sensor Management• SequentialSequential: only one sensor : only one sensor
deployed at a timedeployed at a time• Adaptive:Adaptive: next sensor selection next sensor selection
based on present and past based on present and past measurementsmeasurements
• Multi-modality:Multi-modality: sensor modes can sensor modes can be switched at each timebe switched at each time
• Detection/Classification/Tracking:Detection/Classification/Tracking: task is to minimize decision errortask is to minimize decision error
• Centralized decisionmakingCentralized decisionmaking: : sensor has access to entire set of sensor has access to entire set of previous measurementsprevious measurementsSingle-target state vector:
x
y
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Sequential Adaptive Sensor Management
• Myopic information-based strategies (Kruecher)– Multi-target tracking capabilities
– Fully Bayesian approach
– Non-linear particle filtering with adaptive partitioning
– Renyi-alpha divergence criterion
• Non-Myopic strategies (Blatt&Kreucher)– MDP value function approximations and rollout methods
– Bayesian path averaging
– Reinforcement feedback and learning
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
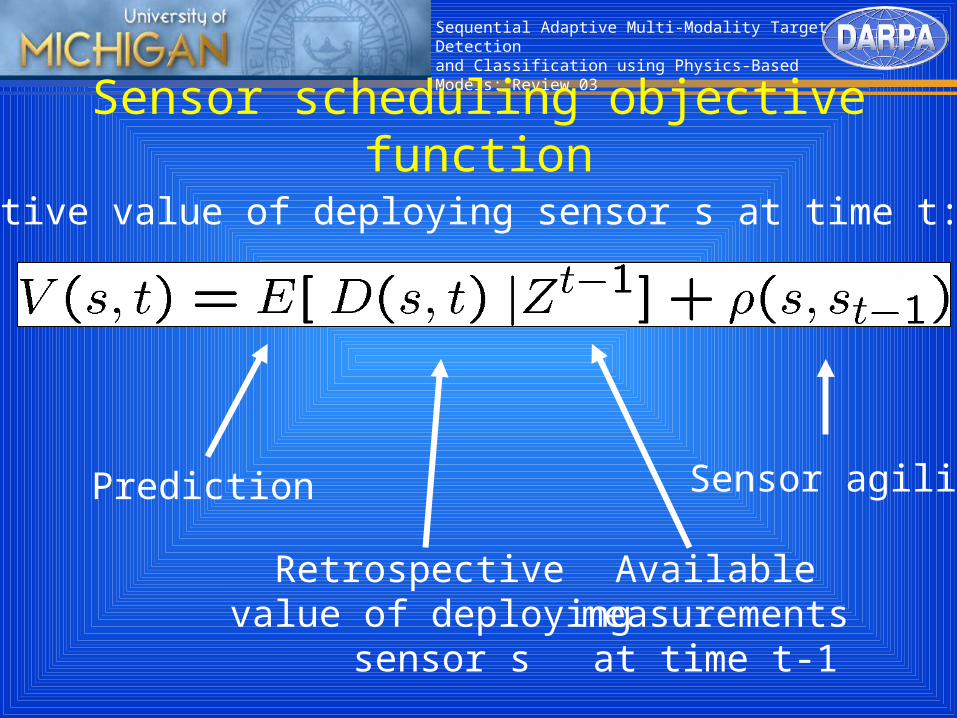
Sensor scheduling objective function
Sensor agilityPrediction
Retrospective value of deploying
sensor s
Availablemeasurements
at time t-1
•Prospective value of deploying sensor s at time t:
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Information-based Value Function• Incremental information gained from data collected
from using sensor s. Can be measured by divergence
• Requires posterior distributions of future target state X given future Z and given present Z, resp.,
• Main issues for evaluation of E[D(s,t)|Z] – Computation complexity– Robustness to model mismatch– Decisionmaking relevance
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Value Function : Alpha Divergence
• Properties of Renyi divergence – Simpler and more stably implementable than KL
(Kreucher&etal:TSP03)– Parameter alpha can be adapted to non-Gaussian posteriors – More robust to mis-specified models than KL
(Kreucher&etal:TSP03)– Related directly to decision error probability via Sanov
(Hero&etal:SPM02)– Information theoretic interpretation
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Relevance of alpha-D to Decision Error• Consider testing hypotheses
• Sanov’s theorem: optimal decision rule has error
• Implication: nearly-optimal decision rule for H1 is
if can generate good estimate of alpha-D
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Multi-Target Bayesian Filtering• Joint multiple target posterior density (JMPD) jointly represents
all target states (Kastela)
• Update eqns must generally be approximated
11111 ||| kkkkkkk dppp xZxxxZx
1
1
|
|||
kk
kkkkkk
p
ppp
Zz
ZxxzZx
kkkkkkk dppp xZxxzZz 11 ||| where
Model Update (Prediction using prior kinematic model)
Measurement Update (Bayes Rule)
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
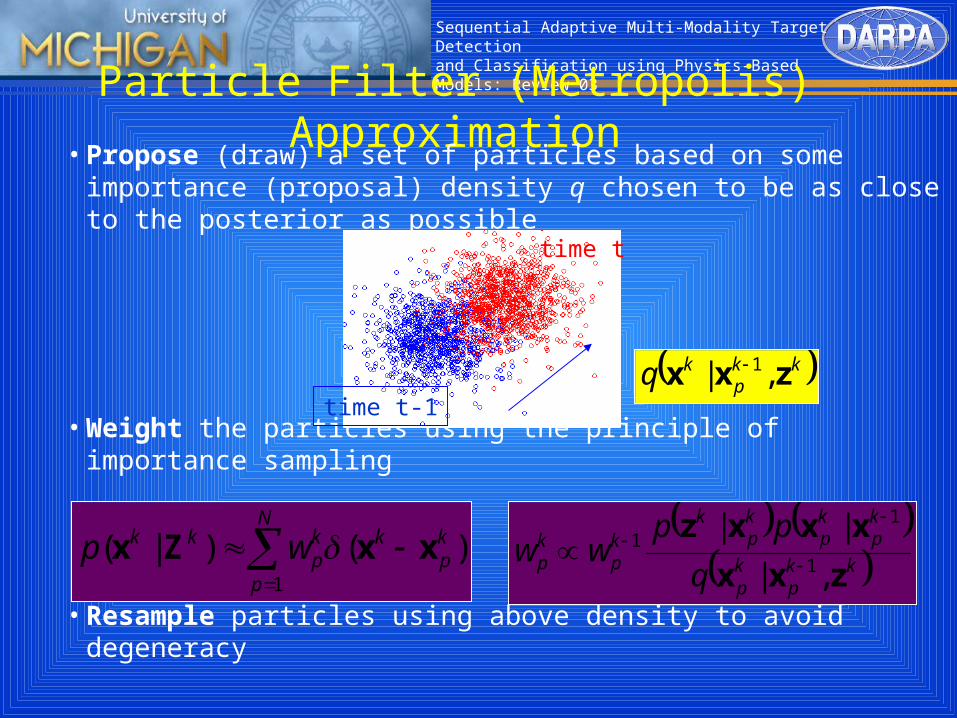
Particle Filter (Metropolis) Approximation• Propose (draw) a set of particles based on some importance
(proposal) density q chosen to be as close to the posterior as possible
• Weight the particles using the principle of importance sampling
• Resample particles using above density to avoid degeneracy
time t-1
time t
kkp
kq zxx ,| 1
N
p
kp
kkp
kk wp1
)()|( xxZx kk
pkp
kp
kp
kp
kkp
kp q
ppww
zxx
xxxz
,|
||1
11
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
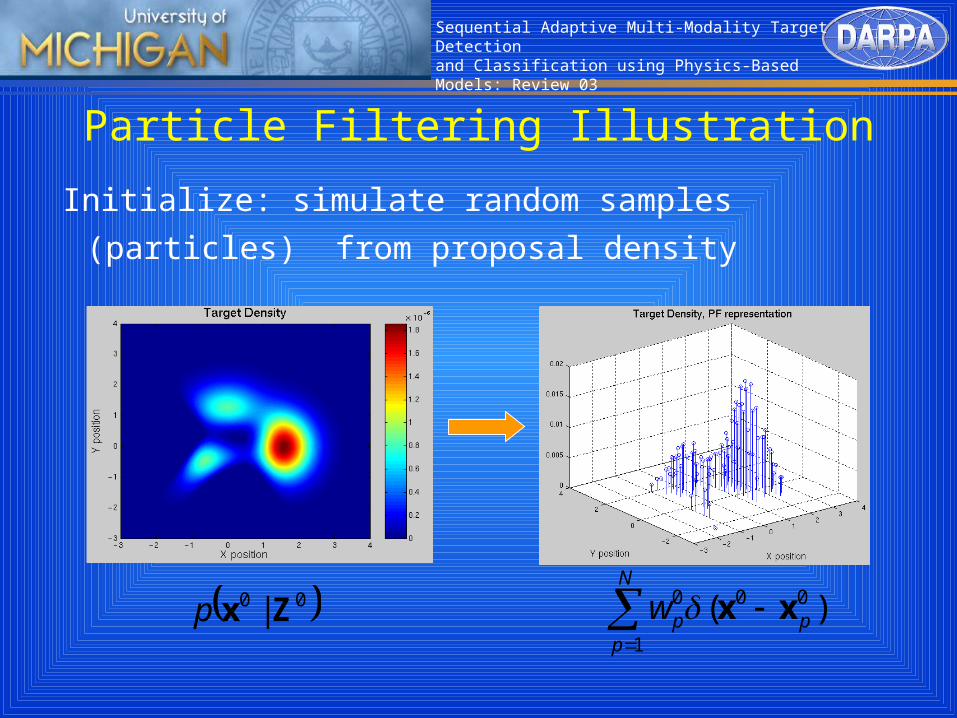
Particle Filtering Illustration
Initialize: simulate random samples (particles) from proposal
density
00 | Zxp
N
pppw
1
000 )( xx
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
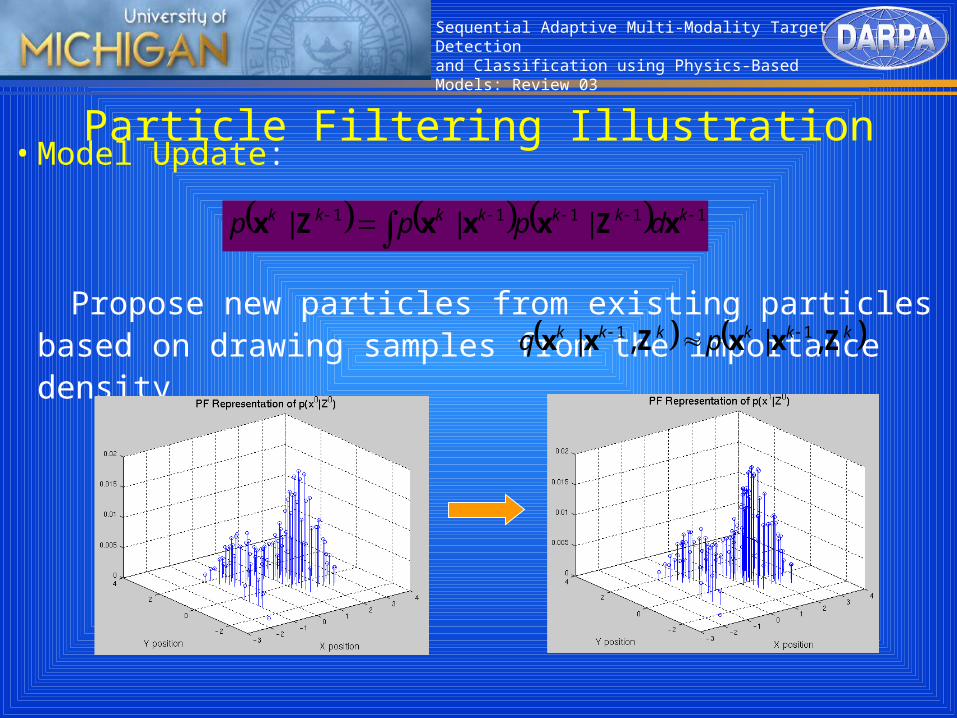
Particle Filtering Illustration• Model Update:
Propose new particles from existing particles based on drawing samples from the importance density kkkkkk pq ZxxZxx ,|,| 11
11111 ||| kkkkkkk dppp xZxxxZx
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
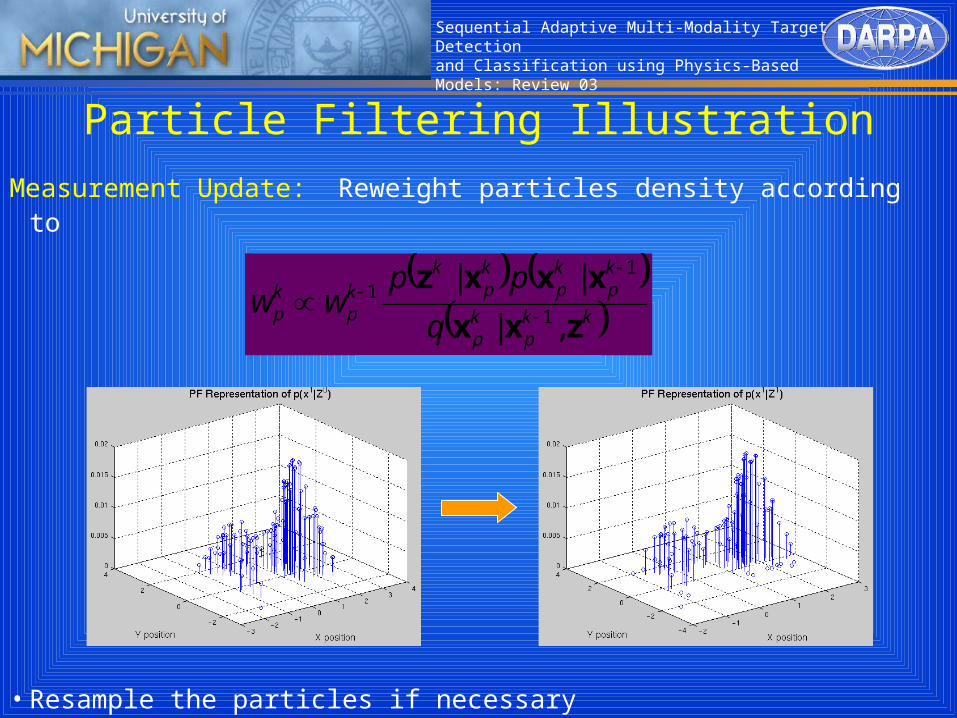
Particle Filtering Illustration
Measurement Update: Reweight particles density according to
• Resample the particles if necessary
kk
pkp
kp
kp
kp
kkp
kp q
ppww
zxx
xxxz
,|
||1
11
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
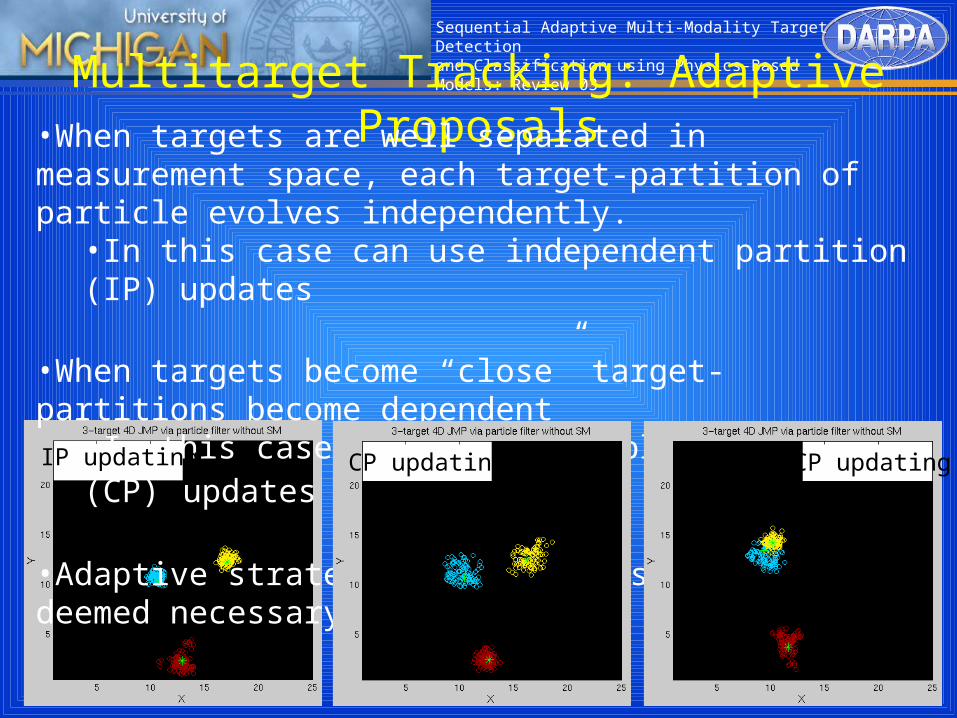
Multitarget Tracking: Adaptive Proposals•When targets are well separated in measurement space, each target-partition of particle evolves independently.
•In this case can use independent partition (IP) updates
•When targets become “close” target-partitions become dependent•In this case should use coupled partition (CP) updates
•Adaptive strategy: use IP unless CP is deemed necessary IP updating CP updatingCP updating
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
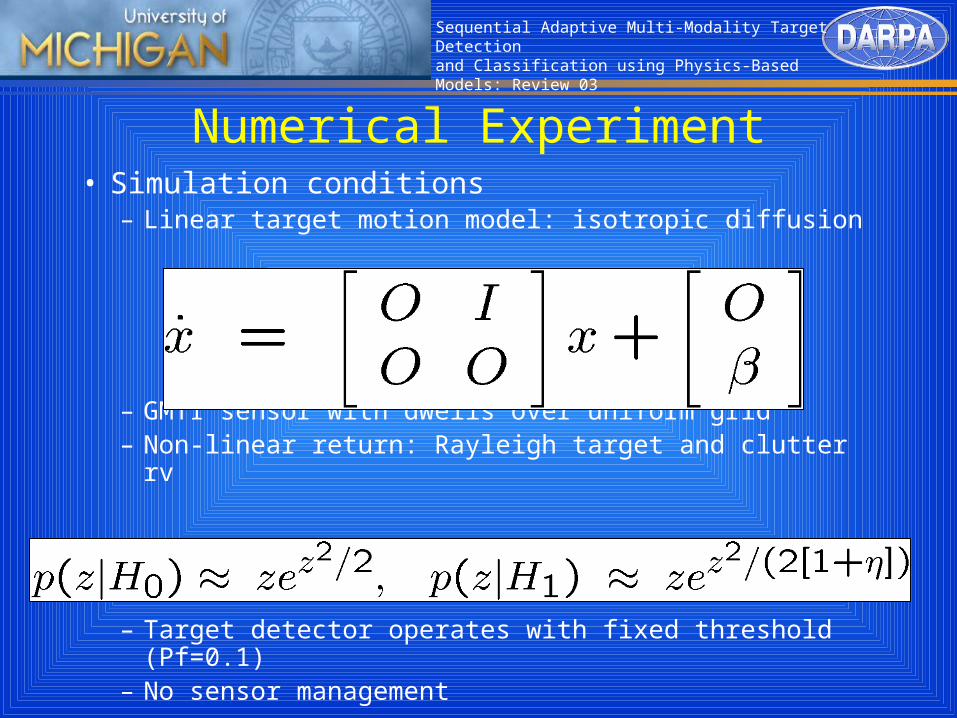
Numerical Experiment• Simulation conditions
– Linear target motion model: isotropic diffusion
– GMTI sensor with dwells over uniform grid– Non-linear return: Rayleigh target and clutter rv
– Target detector operates with fixed threshold (Pf=0.1) – No sensor management
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
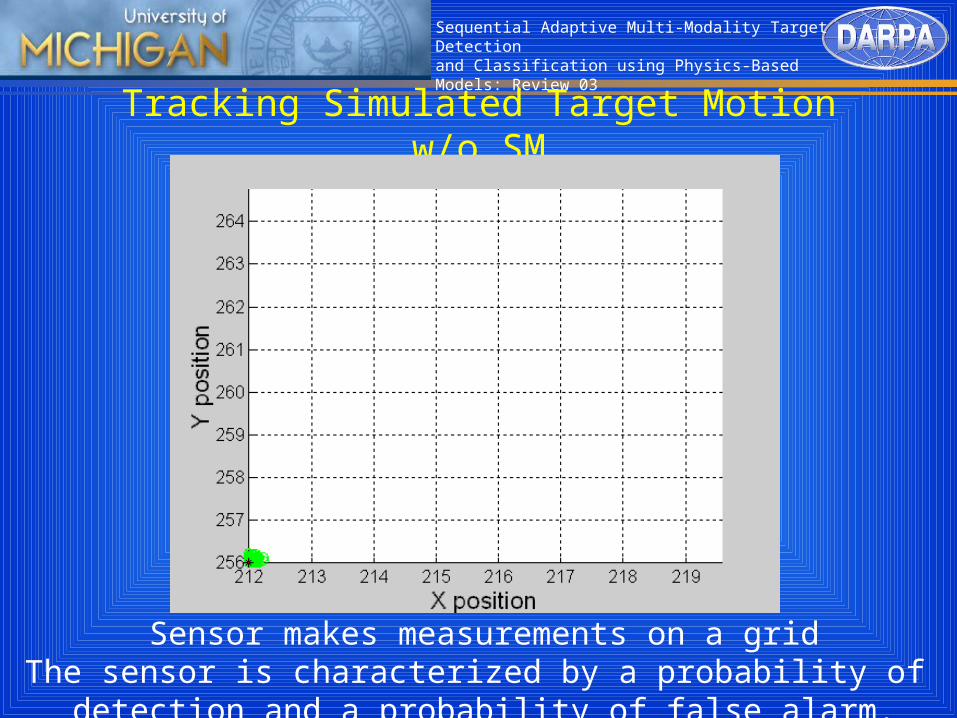
Tracking Simulated Target Motion w/o SM
Sensor makes measurements on a gridThe sensor is characterized by a probability of
detection and a probability of false alarm.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
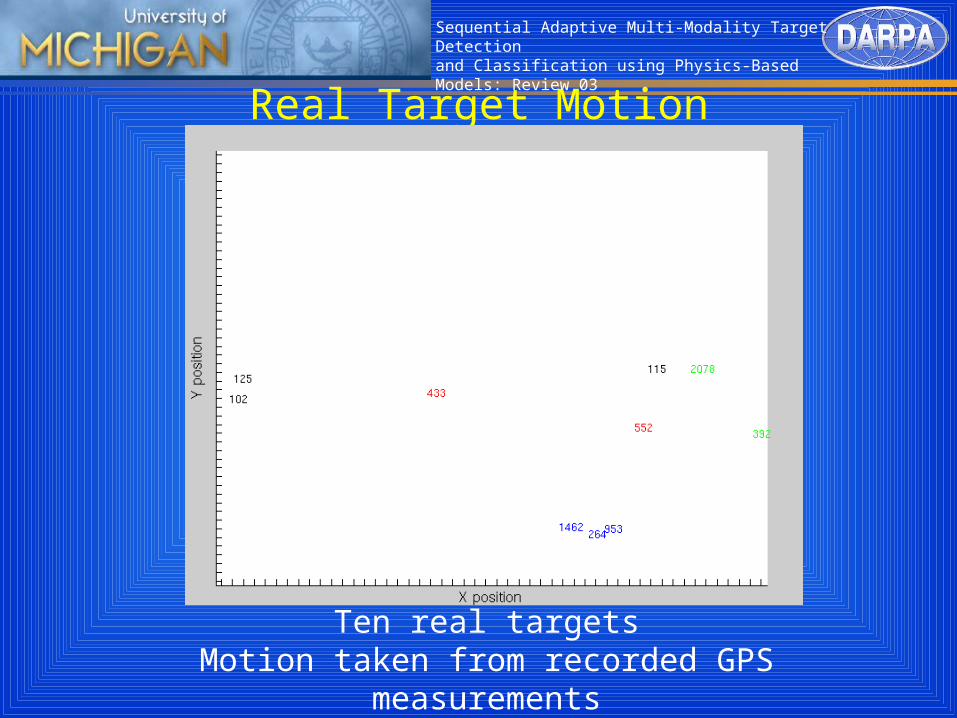
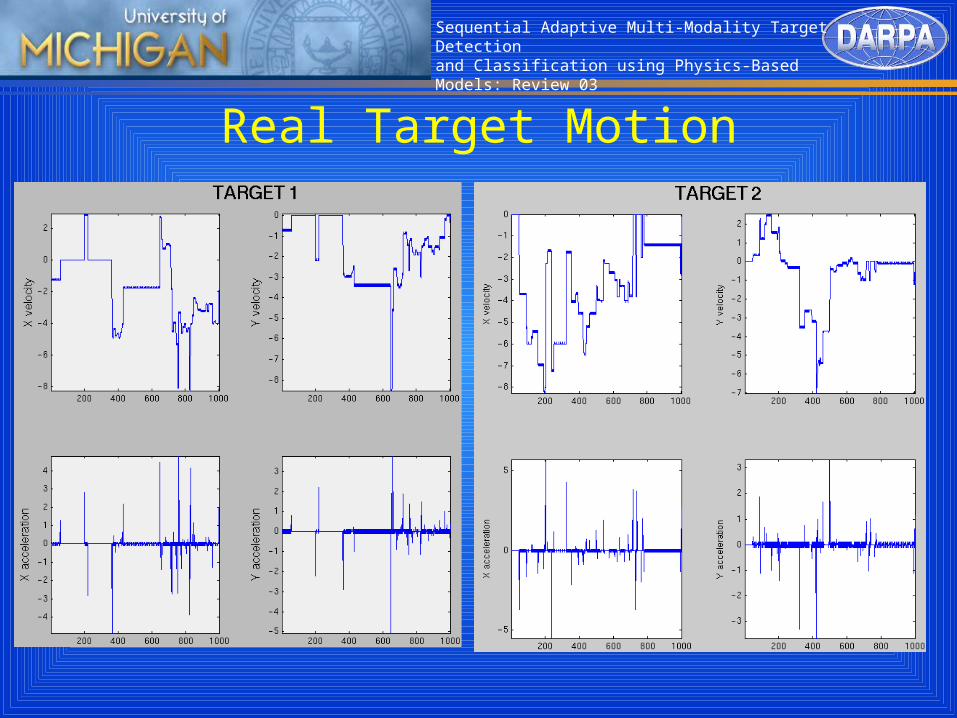
Real Target Motion
Ten real targetsMotion taken from recorded GPS measurements
During a battle simulation exercise at NTC.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Real Target Motion
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
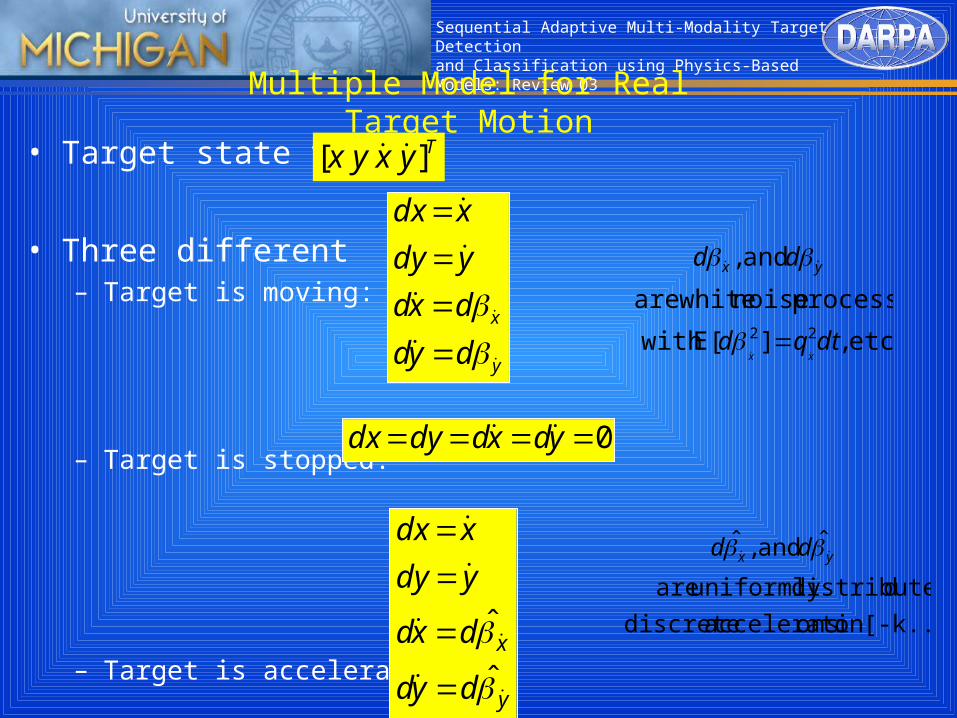
Multiple Model for Real Target Motion
• Target state vector
• Three different models– Target is moving:
– Target is stopped:
– Target is accelerating:
Tyxyx ] [
y
x
dyd
dxd
ydy
xdx
etc. ,]E[with
processes noise whiteare
and ,
22 dtqd
dd
xx
yx
0 ydxddydx
y
x
dyd
dxd
ydy
xdx
ˆ
ˆ
[-k...k]on onsaccelerati discrete
ddistributeuniformly are
ˆ and ,ˆyx dd
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
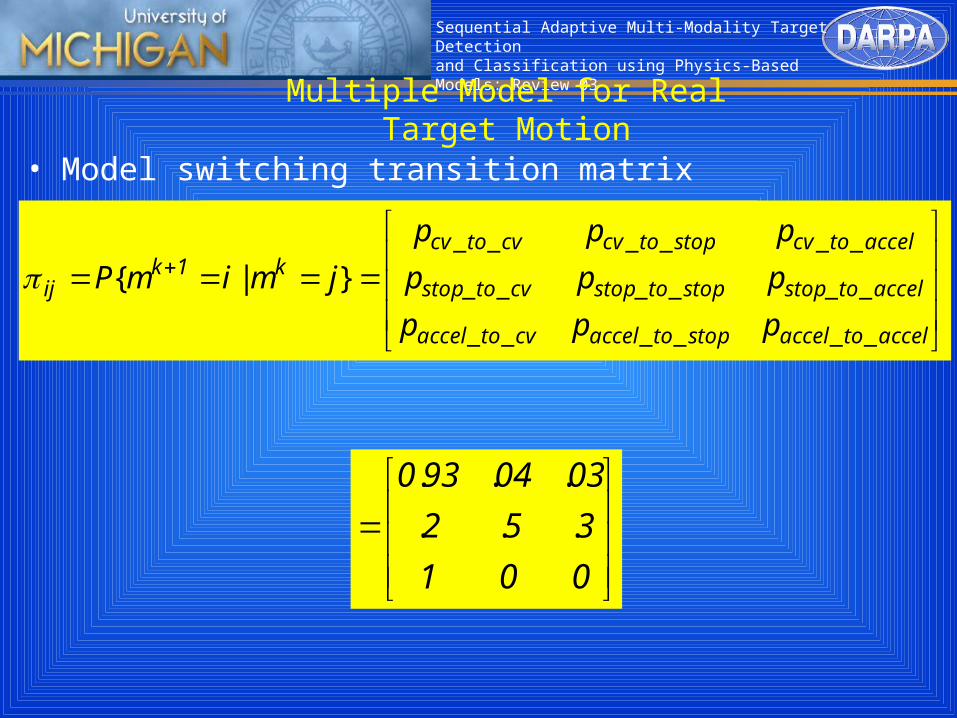
Multiple Model for Real Target Motion
• Model switching transition matrix
acceltoaccelstoptoaccelcvtoaccel
acceltostopstoptostopcvtostop
acceltocvstoptocvcvtocvk1k
ij
ppp
ppp
ppp
jmimP
______
______
______
}|{
001
352
0304930
...
...
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
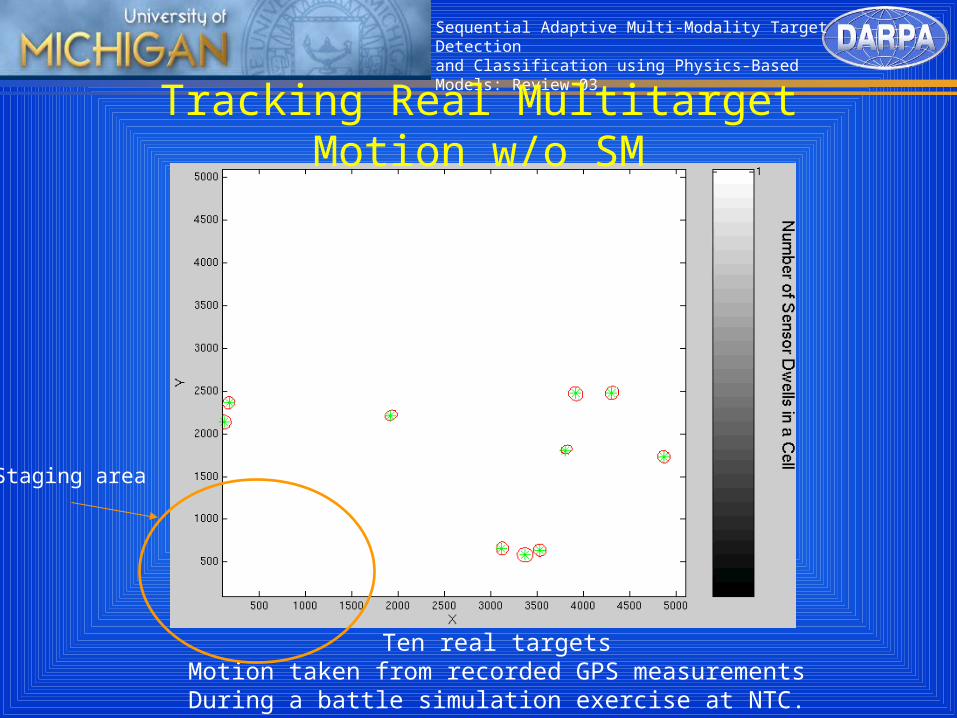
Ten real targetsMotion taken from recorded GPS measurements
During a battle simulation exercise at NTC.
Staging area
Tracking Real Multitarget Motion w/o SM
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
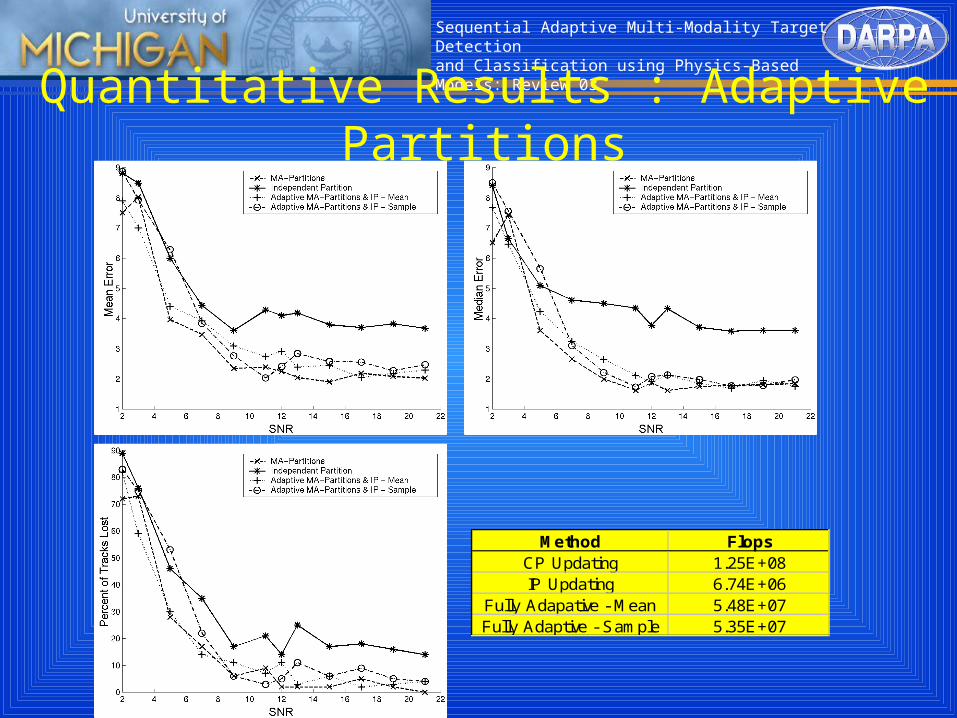
Quantitative Results : Adaptive Partitions
Method FlopsCP Updating 1.25E+08IP Updating 6.74E+06
Fully Adapative - Mean 5.48E+07Fully Adaptive - Sample 5.35E+07
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
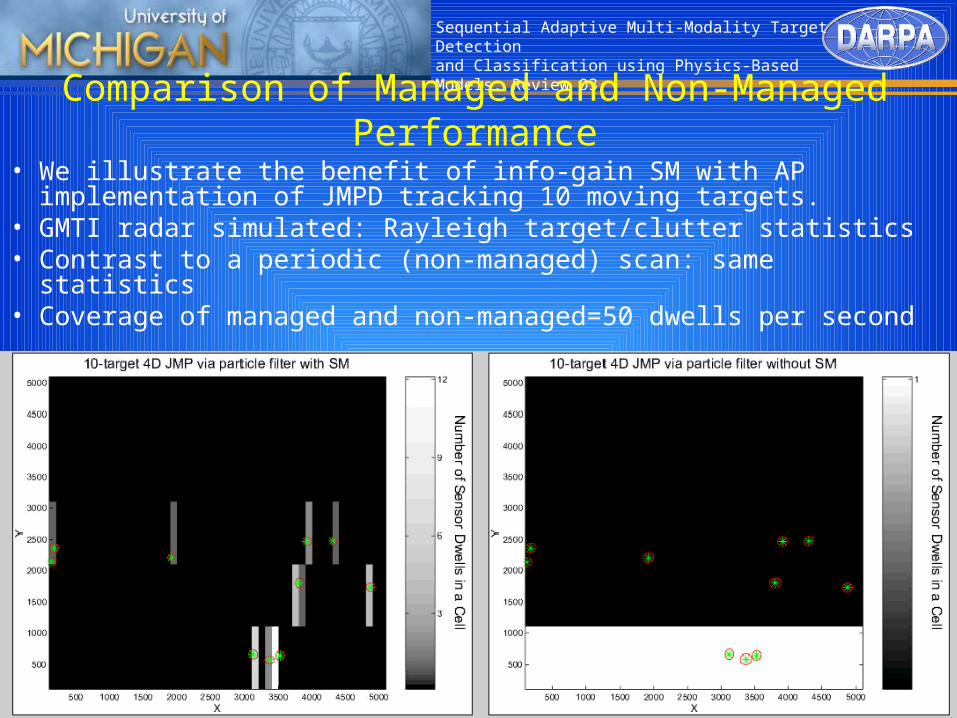
Comparison of Managed and Non-Managed Performance
• We illustrate the benefit of info-gain SM with AP implementation of JMPD tracking 10 moving targets.
• GMTI radar simulated: Rayleigh target/clutter statistics• Contrast to a periodic (non-managed) scan: same statistics• Coverage of managed and non-managed=50 dwells per second
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
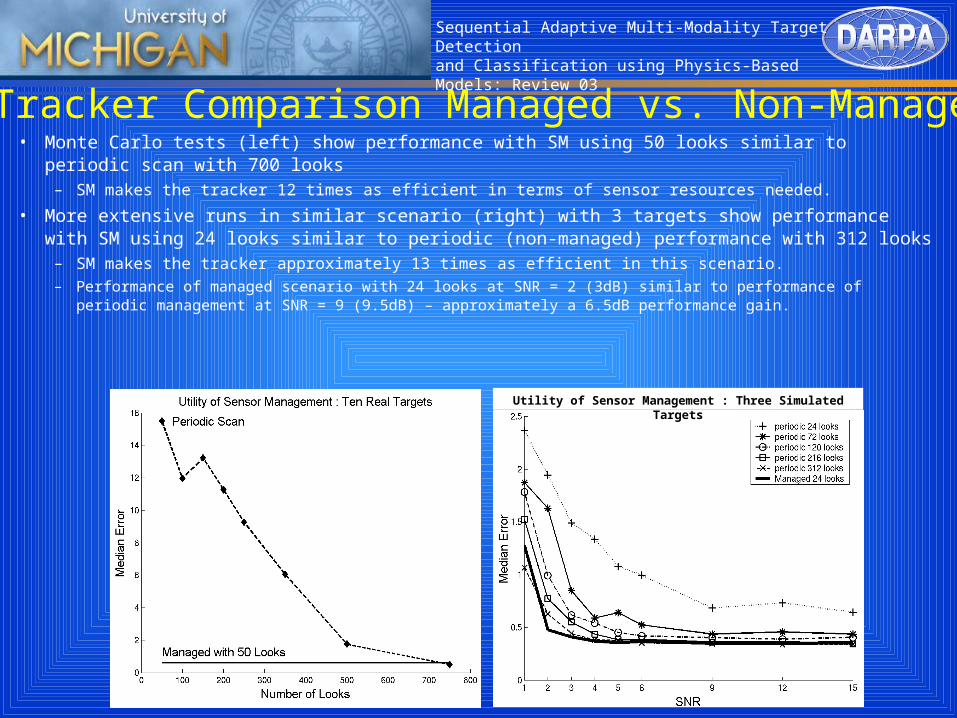
Tracker Comparison Managed vs. Non-Managed• Monte Carlo tests (left) show performance with SM using 50 looks similar to periodic scan with 700
looks – SM makes the tracker 12 times as efficient in terms of sensor resources needed.
• More extensive runs in similar scenario (right) with 3 targets show performance with SM using 24 looks similar to periodic (non-managed) performance with 312 looks
– SM makes the tracker approximately 13 times as efficient in this scenario.– Performance of managed scenario with 24 looks at SNR = 2 (3dB) similar to performance of periodic management at
SNR = 9 (9.5dB) – approximately a 6.5dB performance gain.
Utility of Sensor Management : Three Simulated Targets
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
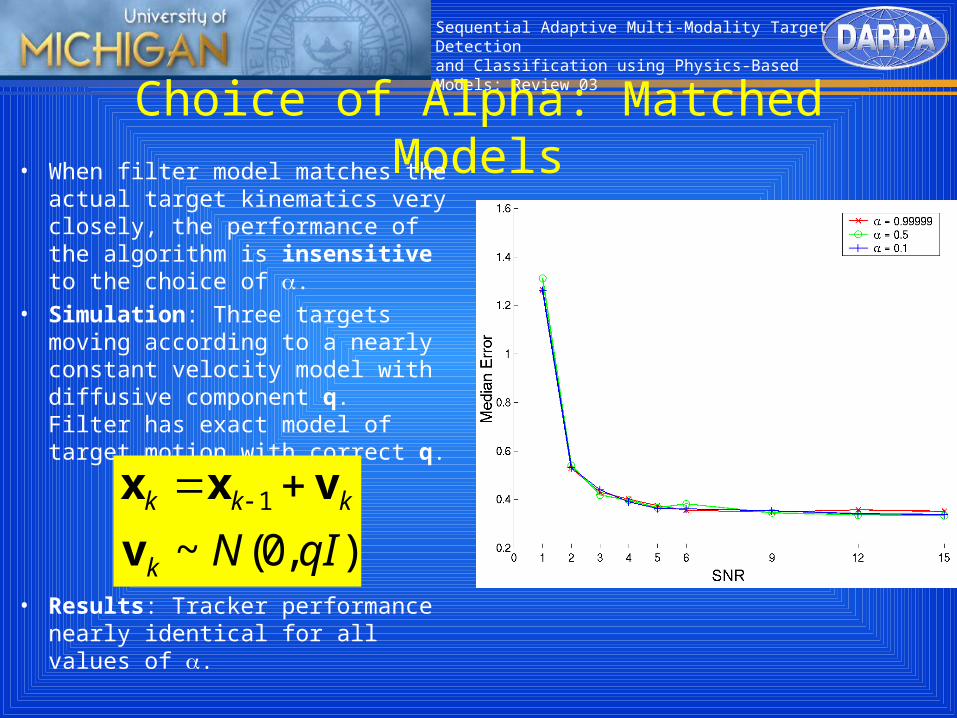
Choice of Alpha: Matched Models• When filter model matches the actual
target kinematics very closely, the performance of the algorithm is insensitive to the choice of .
• Simulation: Three targets moving according to a nearly constant velocity model with diffusive component q. Filter has exact model of target motion with correct q.
• Results: Tracker performance nearly identical for all values of .
),0(~1
qINk
kkk
v
vxx
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
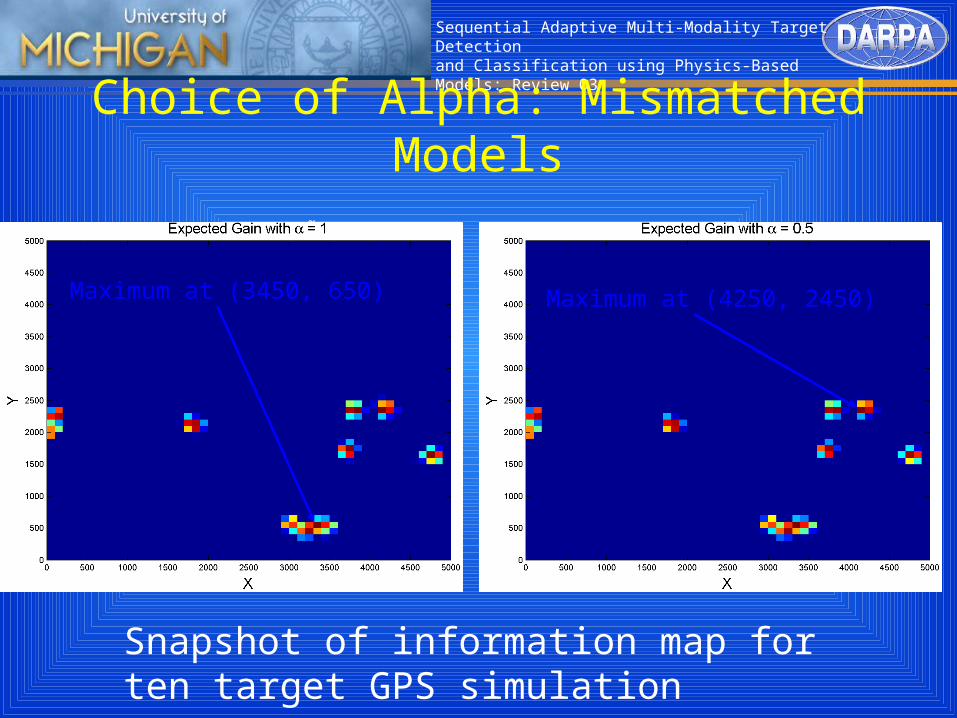
Choice of Alpha: Mismatched Models
Maximum at (4250, 2450)Maximum at (3450, 650)
~
Snapshot of information map for ten target GPS simulation
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
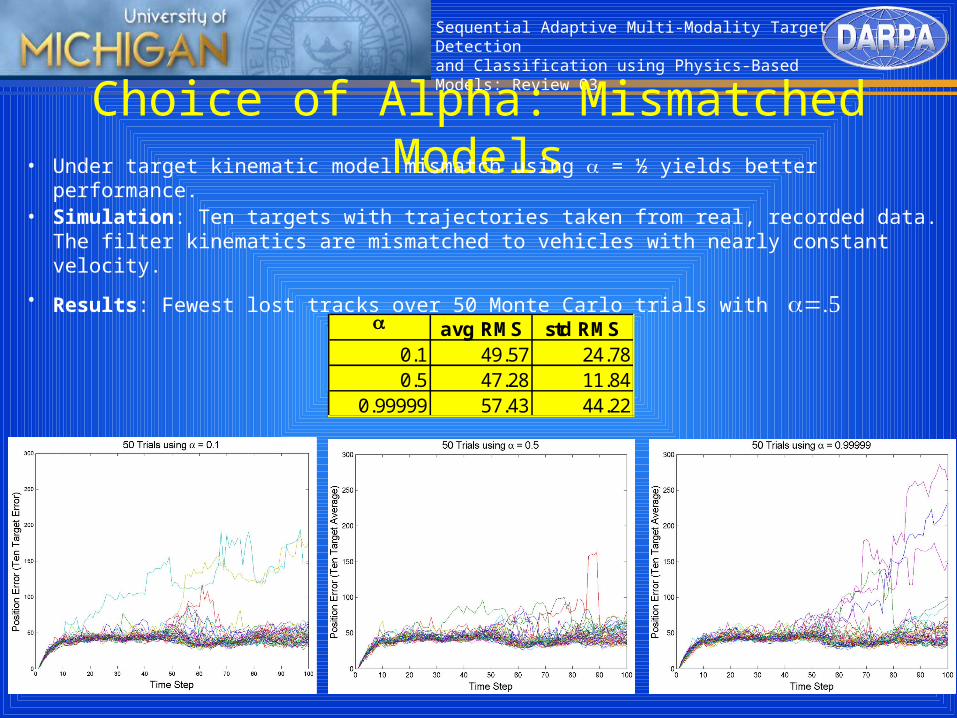
Choice of Alpha: Mismatched Models• Under target kinematic model mismatch using = ½ yields better performance.• Simulation: Ten targets with trajectories taken from real, recorded data. The filter
kinematics are mismatched to vehicles with nearly constant velocity.
• Results: Fewest lost tracks over 50 Monte Carlo trials with avg RMS std RMS
0.1 49.57 24.780.5 47.28 11.84
0.99999 57.43 44.22
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
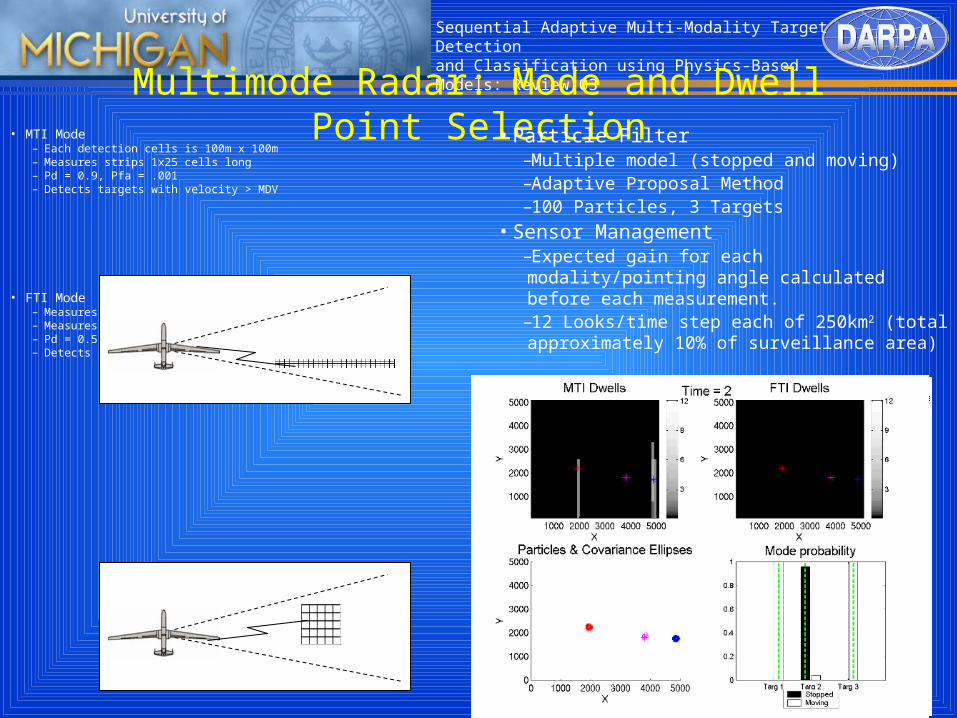
Multimode Radar: Mode and Dwell Point Selection• MTI Mode
– Each detection cells is 100m x 100m– Measures strips 1x25 cells long– Pd = 0.9, Pfa = .001– Detects targets with velocity > MDV
• FTI Mode– Measures cells that are 100m x 100m– Measures spots 5x5 cells on the ground– Pd = 0.5, Pfa = 1e-12– Detects stopped targets
• Particle Filter–Multiple model (stopped and moving)–Adaptive Proposal Method–100 Particles, 3 Targets
• Sensor Management–Expected gain for each modality/pointing angle calculated before each measurement.
–12 Looks/time step each of 250km2 (total approximately 10% of surveillance area)
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
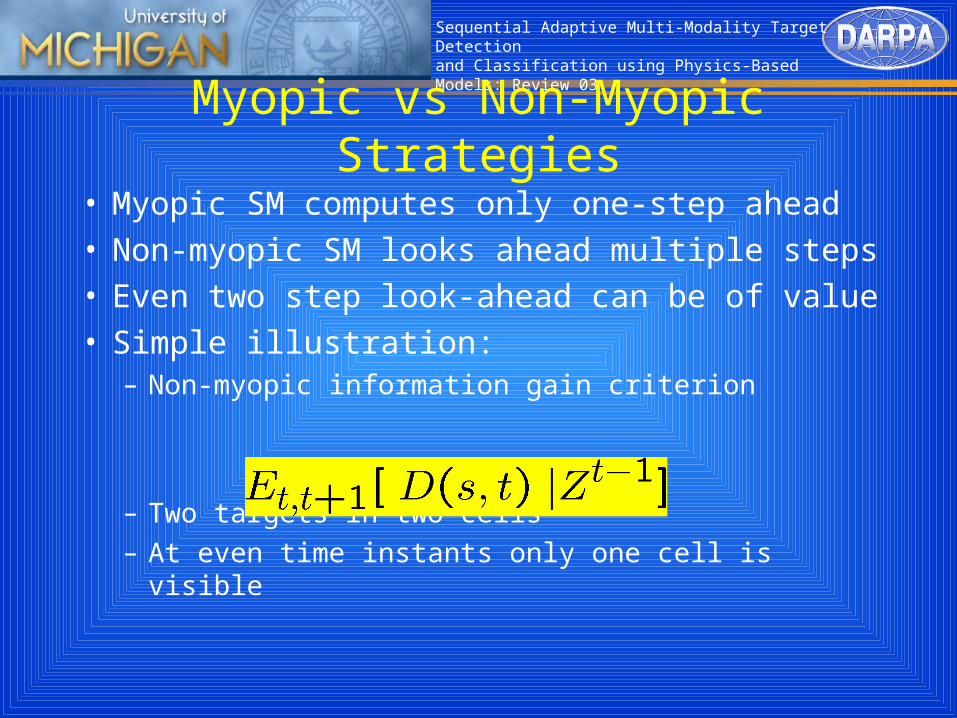
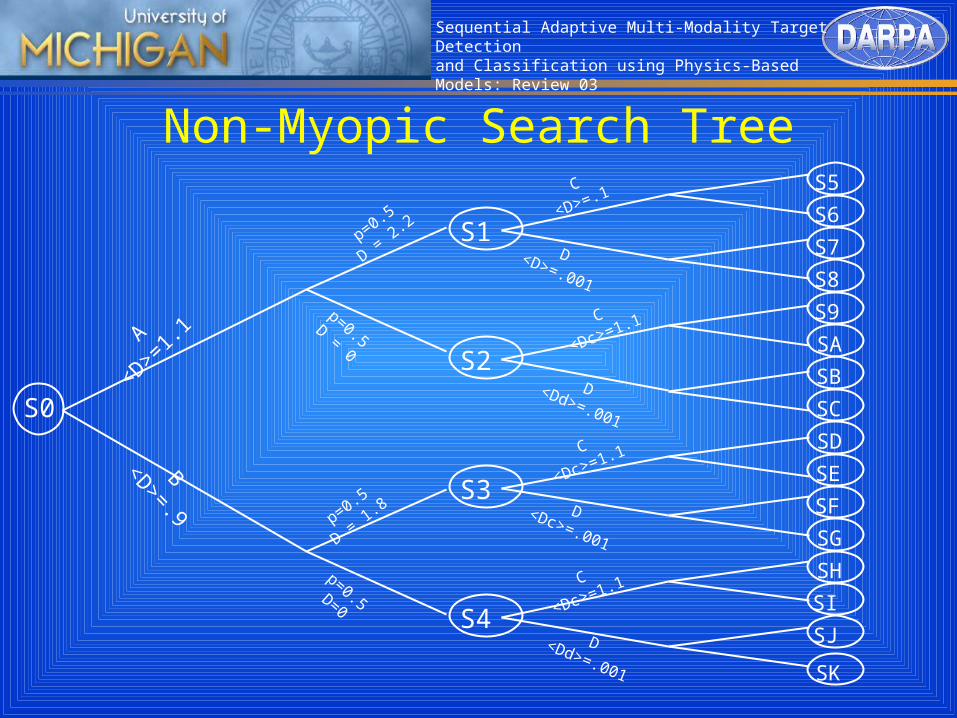
Myopic vs Non-Myopic Strategies
• Myopic SM computes only one-step ahead• Non-myopic SM looks ahead multiple steps• Even two step look-ahead can be of value• Simple illustration:
– Non-myopic information gain criterion
– Two targets in two cells
– At even time instants only one cell is visible
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Non-Myopic Search TreeS5
S6
S7
S8
S9
SA
SB
SC
SD
SE
SF
SG
SH
SI
SJ
SK
S1
S2
S3
S4
A
<D>=1.1
B<D>=.9
C
<D>=.1
C
<Dc>=1.1
C
<Dc>=1.1
C
<Dc>=1.1
D<D>=.001
D<Dd>=.001
D<Dc>=.001
D<Dd>=.001
p=0.5
D = 2.2
p=0.5D = 0
p=0.5
D = 1.8
p=0.5D=0
S0
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
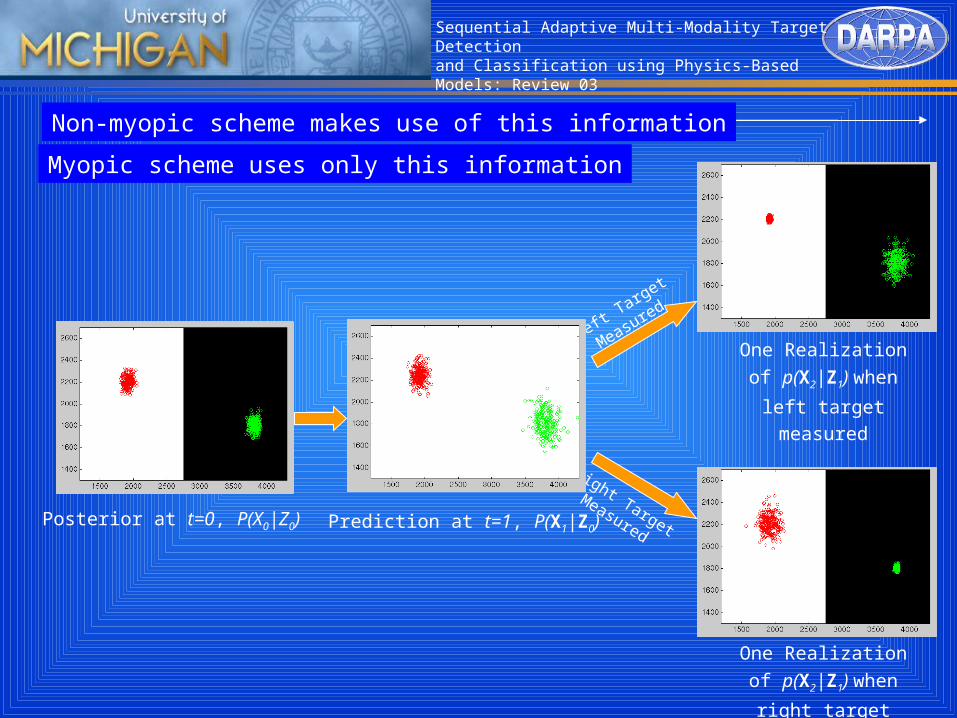
Posterior at t=0, P(X0|Z0) Prediction at t=1, P(X1|Z0)
One Realization of
p(X2|Z1) when right
target measured
Left Target
Measured
Right Target
Measured
One Realization of
p(X2|Z1) when left
target measured
Myopic scheme uses only this information
Non-myopic scheme makes use of this information
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
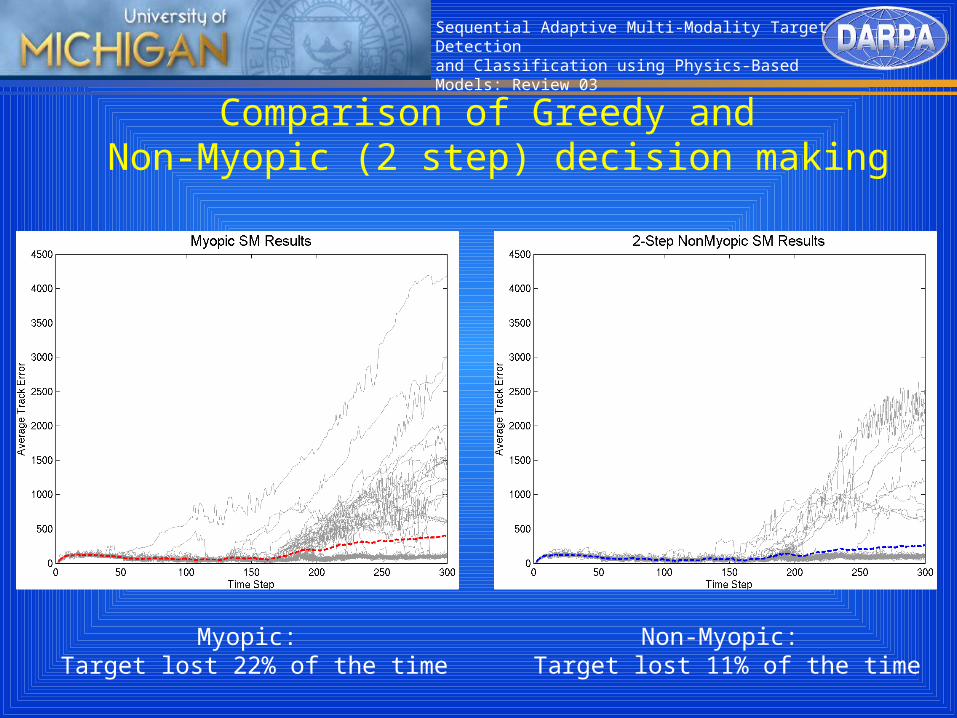
Comparison of Greedy and Non-Myopic (2 step) decision making
Myopic: Target lost 22% of the time
Non-Myopic: Target lost 11% of the time
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
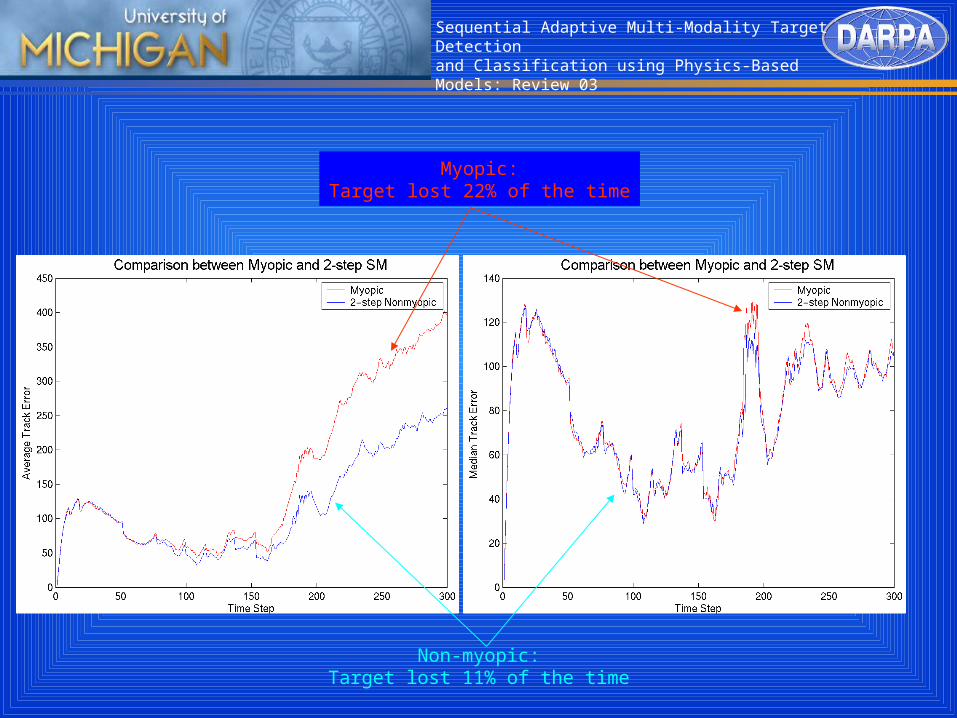
Non-myopic:Target lost 11% of the time
Myopic:Target lost 22% of the time
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
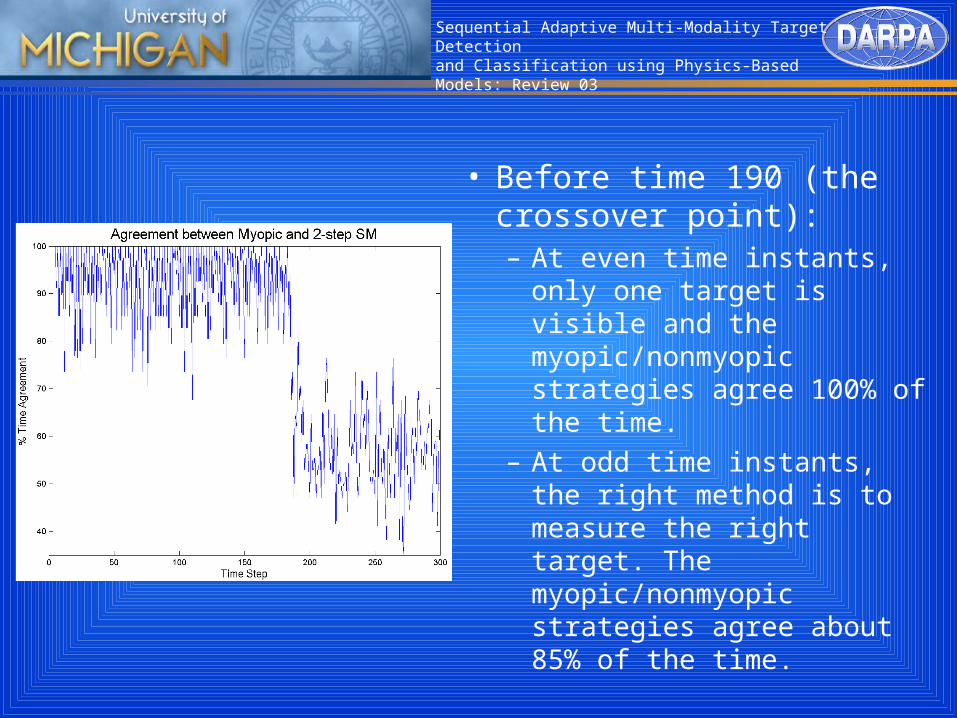
• Before time 190 (the crossover point):– At even time instants, only
one target is visible and the myopic/nonmyopic strategies agree 100% of the time.
– At odd time instants, the right method is to measure the right target. The myopic/nonmyopic strategies agree about 85% of the time.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Foci for 2nd Year
• Non-parametric polarimetric backscatter modeling Non-parametric polarimetric backscatter modeling for multistatic target detectionfor multistatic target detection
• Target and clutter model reduction and pattern Target and clutter model reduction and pattern matching matching
• Adaptive non-myopic sensor scheduling and Adaptive non-myopic sensor scheduling and managementmanagement
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Personnel on A. Hero’s sub-Project(2002-03)
• Krishnakanth Subramanian, 1st year MS student– Birla Institute of Technology– 50% GSRA
• Michael Fitzgibbons, 1st year MS student– Northeastern Univ.– 50% GSRA
• Cyrille Hory, Post-doctoral researcher– University of Grenoble– Area of specialty: data analysis and modeling, SAR, time-frequency
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Personnel on A. Hero’s sub-Project(ctd)• Jose Costa, 3rd year doctoral student
– IST Lisbon– Portugese fellowship, summer GSRA
• Chris Kreucher, 3rd year grad student– UM-Dearborn, Veridian Intl– Veridian support
• Neal Patwari, 2nd year doctoral student– Virginia tech– NSF Graduate Fellowship, summer GSRA
• Doron Blatt, 2nd year doctoral student– Univ. Tel Aviv– Dept. Fellowship, summer GSRA
• Raghuram Rangarajan, 2nd year doctoral student– IIT Madras– Dept. Fellowship, summer GSRA
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Publications(02-03): Estimation-Classification
• J. Costa and A. O. Hero, “Manifold learning with geodesic minimal spanning trees,” submitted to IEEE T-SP (Special Issue on Machine Learning), July 2003.
• A. O. Hero, J. Costa and B. Ma, "Convergence rates of minimal graphs with random vertices," submitted to IEEE T-IT, March 2003.
• J. Costa, A. O. Hero and C. Vignat, "On solutions to multivariate maximum alpha-entropy Problems", in Energy Minimization Methods in Computer Vision and Pattern Recognition (EMM-CVPR), Eds. M. Figueiredo, R. Rangagaran, J. Zerubia, Springer-Verlag, 2003
• D. Blatt and A. Hero, "Asymptotic distribution of log-likelihood maximization based algorithms and applications," in Energy Minimization Methods in Computer Vision and Pattern Recognition (EMM-CVPR), Eds. M. Figueiredo, R. Rangagaran, J. Zerubia, Springer-Verlag, 2003
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Publications(02-03): Sensor Management
• C. Kreucher, K. Kastella, and A. Hero, “Sensor management using relevance feedback learning,” submitted to IEEE T-SP, June 2003
• C. Kreucher, K. Kastella, and A. Hero, “Multitarget tracking using particle representation of the joint multi-target density,” submitted to IEEE T-AES, Aug. 2003.
• C. Kreucher, K. Castella, and A. O. Hero, "Multitarget sensor management using alpha divergence measures,” Proc First IEEE Conference on Information Processing in Sensor Networks , Palo Alto, April 2003.
• C..Kreucher, K. Kastella, and A. Hero, “A Bayesian Method for Integrated Multitarget Tracking and Sensor Management”, 6th International Conference on Information Fusion, Cairns, Australia, July 2003.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Publications(02-03): Sensor Management(ctd)
• C. Kreucher, C., Kastella, K., and Hero, A., “Tracking Multiple Targets Using a Particle Filter Representation of the Joint Multitarget Probability Density”, SPIE, San Diego California, August 2003.
• C. Kreucher, K. Kastella, and A. Hero, “Information-based sensor management for multitarget tracking”, SPIE, San Diego, California, August 2003.
• C. Kreucher, K. Kastella, and A. Hero, “Particle filtering and information prediction for sensor management”, 2003 Defense Applications of Data Fusion Workshop, Adelaide, Australia, July 2003.
• C. Kreucher, K. Kastella, and A. Hero, “Information Based Sensor Management for Multitarget Tracking”, Proc. Workshop on Multiple Hypothesis Tracking: A Tribute to Samuel S. Blackman, San Diego, CA, May 30, 2003.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Publications(02-03): SP for Sensor Nets
• N. Patwari and A. O. Hero, "Hierarchical censoring for distributed detection in wireless sensor networks,” Proc. Of ICASSP, Hong Kong, April 2003.
• N. Patwari, A. O. Hero, M. Perkins, N. S. Correal and R. J. O'Dea, "Relative location estimation in sensor networks,” IEEE T-SP, vol. 51, No. 9, pp. 2137-2148, Aug. 2003.
• A. O. Hero , “Secure space-time communication," to appear in IEEE T-IT, Dec. 2003.
• M.F. Shih and A. O. Hero, "Unicast-based inference of network link delay distributions using mixed finite mixture models," IEEE T-SP, vol. 51, No. 9, pp. 2219-2228, Aug. 2003.
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Synergistic Activities(02-03)• Veridian, Inc
– K. Kastella: collaboration with A. Hero in sensor management, July 2002-– J. Ackenhusen: collaboration with A. Hero in mine detection, Oct. 2002-– C. Kreucher: doctoral student of A. Hero, Sept. 2002-
• ARL– NAS-SED: A. Hero is a member of yearly review panel, May 2002-– B. Sadler: N. Patwari (doctoral student of A. Hero) held internship in
distributed sensor information processing, summer 2003• ERIM Intl.
– B. Thelen&N. Subotic: collaborators with A. Hero, Oct. 2002• Chalmers Univ.,
– M. Viberg: A. Hero is Opponent on multimodality landmine detection doctoral thesis, Aug 2003
• EMMCVPR: – “Entropy, spanner graphs, and pattern matching,” plenary lecture, July 2003
Sequential Adaptive Multi-Modality Target Detection and Classification using Physics-Based Models: Review 03
Cross-Fertilization to Other Sponsors(02-03)• NSF-ITR
– “Modular strategies for internetwork monitoring,” A. Hero, PI (2003-2008)
• NIH-P01– “Automated 3D registration for enhanced cancer
management,” C. Meyer, PI (2002-2007)
• NIH-R01– “Radionucleides: radiation detection and quantification,” N.
Clinthorne, PI (2002-2005)
• Sramek Foundation– “Genetic pathways to diabetic retinopathy,” A. Swaroop, PI
(2002-2005)





























