Embed Size (px)
Citation preview

TR0003 (REV 10/98) TECHNICAL REPORT DOCUMENTATION PAGE STATE OF CALIFORNIA • DEPARTMENT OF TRANSPORTATION ADA Notice
For individuals with sensory disabilities, this document is available in alternate formats. For alternate format information, contact the Forms Management Unit at (916) 445-1233, TTY 711, or write to Records and Forms Management, 1120 N Street, MS-89, Sacramento, CA 95814.
CA17-3079
1. REPORT NUMBER 2. GOVERNMENT ASSOCIATION NUMBER 3. RECIPIENT'S CATALOG NUMBER
Examining the Safety, Mobility and Environmental Sustainability Co-Benefits and Tradeoffs of Intelligent Transportation Systems
4. TITLE AND SUBTITLE
March 2017
5. REPORT DATE
6. PERFORMING ORGANIZATION CODE
Matthew J. Barth, University of California, Riverside
7. AUTHOR 8. PERFORMING ORGANIZATION REPORT NO.
College of Engineering - Center for Environmental Research and Technology University of California, Riverside 1084 Columbia Ave Riverside, CA 92507
9. PERFORMING ORGANIZATION NAME AND ADDRESS 10. WORK UNIT NUMBER
65A0527 029
11. CONTRACT OR GRANT NUMBER
California Department of Transportation Division of Research, Innovation and Systems Information MS-83 / PO Box 942873 Sacramento, CA 94273-0001
12. SPONSORING AGENCY AND ADDRESS White Paper August 24, 2016 - March 31, 2017
13. TYPE OF REPORT AND PERIOD COVERED
14. SPONSORING AGENCY CODE
15. SUPPLEMENTARY NOTES
16. ABSTRACT
As part of Intelligent Transportation Systems (ITS) development, a significant number of Connected and Automated Vehicles (CAV) applications are now being designed to improve a variety of transportation-related Measures of Effectiveness (MOEs). Safety, mobility and environmental sustainability typically represent the three cornerstones when evaluating the effectiveness of a CAV application system. These key MOEs can be evaluated through various performance indicators, many that are described in the literature. Most CAV applications are typically developed with the major goal of improving one of these key elements. As examples: 1) crash avoidance systems on vehicles are being developed specifically for improving safety; 2) adaptive signal control systems are being put into place to improve mobility; and 3) ecoapproach and departure systems at signalized intersections are now being contemplated to reduce vehicle energy and emissions. To date, very few studies on CAV applications have been conducted that provide a holistic assessment of all three of these MOE elements. Many CAV applications may have co-benefits in the sense that they can improve a combination of safety, mobility and environmental sustainability. On the other hand, some CAV applications may actually have tradeoffs between these elements.
Intelligent Transportation Systems (ITS), Connected and Automated Vehicles (CAV), Measures of Effectiveness (MOEs), Environmental Sustainability
17. KEY WORDS
No restriction 18. DISTRIBUTION STATEMENT
Unclassified
19. SECURITY CLASSIFICATION (of this report)
37
20. NUMBER OF PAGES
None
21. COST OF REPORT CHARGED
Reproduction of completed page authorized.

DISCLAIMER STATEMENT
This document is disseminated in the interest of information exchange. The contents of this report reflect the views of the authors who are responsible for the facts and accuracy of the data presented herein. The contents do not necessarily reflect the official views or policies of the State of California or the Federal Highway Administration. This publication does not constitute a standard, specification or regulation. This report does not constitute an endorsement by the Department of any product described herein.
For individuals with sensory disabilities, this document is available in alternate formats. For information, call (916) 654-8899, TTY 711, or write to California Department of Transportation, Division of Research, Innovation and System Information, MS-83, P.O. Box 942873, Sacramento, CA 94273-0001.

Examiningthe Safety, Mobility and Environmental SustainabilityCo-BenefitsandTradeoffsofIntelligent Transportation Systems
March2017 AWhit ePaper fromtheNationalCenterfor SustainableTransportation
DanyangTian, UniversityofCalifornia, Riverside
WeixiaLi, UniversityofCalifornia, Riverside
GuoyuanWu, UniversityofCalifornia, Riverside
MatthewJ.Barth, UniversityofCalifornia, Riverside

About the National Center for Sustainable Transportation TheNationalCenterforSustainable Transportationisaconsortiumofleadinguniversities committedtoadvancinganenvironmentallysustainabletransportationsystemthroughcutting-edgeresearch, directpolicyengagement, andeducationofourfutureleaders. Consortium membersinclude:UniversityofCalifornia, Davis;UniversityofCalifornia, Riverside;University ofSouthernCalifornia;CaliforniaStateUniversity, LongBeach;GeorgiaInstituteofTechnology; andUniversityofVermont.Moreinformationcanbefoundat:ncst.ucdavis.edu.
Disclaimer Thecontentsofthisreportreflecttheviewsoftheauthors, whoareresponsibleforthefacts andtheaccuracyoftheinformationpresentedherein.Thisdocumentisdisseminatedunder thesponsorshipoftheUnitedStates DepartmentofTransportation’sUniversityTransportation Centers program, intheinterestofinformationexchange.The U.S. Government andtheState ofCalifornia assumesnoliabilityforthecontentsorusethereof. Nordoesthecontent necessarilyreflecttheofficialviewsorpoliciesoftheU.S.Governmentandthe Stateof California. Thisreportdoesnotconstituteastandard, specification, orregulation.
Acknowledgments ThisstudywasfundedbyagrantfromtheNationalCenterforSustainableTransportation (NCST), supportedby USDOTandCaltrans throughthe University TransportationCenters program.Theauthorswouldliketothank theNCST, USDOT, andCaltrans fortheirsupportof university-basedresearchintransportation, andespeciallyforthefundingprovidedinsupport ofthisproject.

Examining the Safety, Mobility and Environmental Sustainability Co-Benefits and Tradeoffs of Intelligent Transportation
Systems ANationalCenterforSustainableTransportation ResearchReport
March2017
Danyang Tian, Bourns College of Engineering, Center for Environmental Research and Technology
Weixia Li, Bourns College of Engineering, Center for Environmental Research and Technology
Guoyuan Wu, Bourns College of Engineering, Center for Environmental Research and Technology
Matthew J. Barth, Bourns College of Engineering, Center for Environmental Research and Technology
University of California, Riverside

[pageleftintentionally blank]

TABLE OF CONTENTS
EXECUTIVESUMMARY ................................................................................................................... ii
Introduction ...................................................................................................................................1
MeasureofEffectiveness(MOE)forCAVApplications ..................................................................2
Safety .........................................................................................................................................2
Mobility ......................................................................................................................................3
EnvironmentalImpacts ..............................................................................................................3
Safety, Mobility, EnvironmentCategorySummary........................................................................4
LiteratureSurvey........................................................................................................................5
SynergiesandTrade-OffAnalysisofTypicalCAVApplications ......................................................1
Vehicle-CentricCAVApplications...............................................................................................2
Infrastructure-CentricCAVApplications ....................................................................................6
Traveler-CentricCAVApplications ...........................................................................................10
ParameterTuningStrategies........................................................................................................12
SpecificCaseStudies ....................................................................................................................13
PerformanceIndicators............................................................................................................14
SimulationModelandScenario ...............................................................................................14
Numerical ResultsandTradeoff/Co-BenefitAnalysis ..............................................................15
ConclusionsandFutureWork ......................................................................................................17
References....................................................................................................................................18
i

Examining the Safety, Mobility and Environmental Sustainability Co-Benefits and Tradeoffs of Intelligent Transportation Systems
EXECUTIVE SUMMARY AspartofIntelligentTransportationSystems(ITS)development, asignificantnumberof ConnectedandAutomatedVehicles(CAV)applicationsarenowbeingdesignedtoimprovea varietyoftransportation-relatedMeasuresofEffectiveness(MOEs).Safety, mobilityand environmentalsustainabilitytypicallyrepresentthethreecornerstoneswhenevaluatingthe effectivenessofaCAVapplicationsystem.ThesekeyMOEscanbeevaluatedthroughvarious performanceindicators, manythataredescribedintheliterature.MostCAVapplicationsare typicallydevelopedwiththemajorgoalofimprovingoneofthesekeyelements.Asexamples: 1)crashavoidancesystemsonvehiclesare beingdevelopedspecificallyforimprovingsafety;2) adaptivesignalcontrolsystemsarebeingputintoplacetoimprovemobility;and3)eco-approachanddeparturesystemsatsignalizedintersectionsarenowbeingcontemplatedto reduce vehicle energy andemissions.
Todate, veryfewstudiesonCAVapplicationshavebeenconductedthatprovidea holistic assessmentofallthreeoftheseMOEelements.ManyCAVapplicationsmayhaveco-benefitsin thesensethattheycanimproveacombinationofsafety, mobilityandenvironmental sustainability.Ontheotherhand, someCAVapplicationsmayactuallyhavetradeoffsbetween theseelements.
Aspartofaninitialresearchproject, weconductedanin-depthliteraturereviewacrossawide rangeofCAVapplicationsandhavebroadlyclassifyingtheseapplicationsintovehicle-centric, infrastructure-centric, andtraveler-centricCAVapplications.Thisclassificationisdependenton the“focus”oftheobjectsthathavebeeninvolvedintheapplication’sdeveloping and deploying process.
Inthiswhitepaper, webrieflydescribethethreemajorMOEs, followedbyacategorization summarybasedonthemostrecentliterature.Next, anumberoftypicalCAVapplicationshave beenexaminedindepth, providingadetailedanalysisofthedifferentMOEsco-benefitsand tradeoffs.
Further, threerepresentativeCAVapplicationshavebeenexaminedindetailinordertoshow theassociationbetweentheapplicationfocusandtradeoffs/co-benefitsofdifferent performancemeasures.TheCAVapplicationsincludeHighSpeedDifferentialWarning(safety-focused), LaneSpeedMonitoring(mobility-focused), andEco-SpeedHarmonization (environmentalimpacts-focused).Wethenhighlightseveralfutureresearchdirections, includingtheidentificationofkeyinfluentialfactorsonsystemperformanceandhowtoobtain
ii

co-benefitsacrossallkeyMOEs.Theoverallintentofthiswhitepaperistoinformpractitioners andpolicymakersonthepotentialinteractionsbetweenthesafety, mobility, and environmentalsustainabilitygoalsofimplementingspecificCAVapplicationsaspartoftheirITS programs.
iii

Introduction ConnectedandAutomatedVehicle(CAV)technologyisemergingrapidlyasakeycomponentof IntelligentTransportationSystems(ITS) development.ThereareanumberofU.S.Department ofTransportation(USDOT)pilotprogramsthathighlightCAVtechnology;thesetechnologies arealsoplayingamajorroleinavarietyof“SmartCity”initiativesacrosstheU.S.[USDOT, 2017].Further, manyautomobilemanufacturersaredevelopingrelevantCAVapplications [Uhlemann, 2016], suchasVolvo’sautonomousdrivingmoderesearch, ToyotaMotor Corporation’sinvestmentinArtificialIntelligence(AI)toreducecaraccidents(partoftheirITS Vehicle-to-Everything(V2X)system), BMW’sEnlightenapplicationshowingtrafficsignsstatus ahead, andHonda’searlydeploymentandeffectivenessevaluationofV2Xapplications[Honda, 2016].
WiththeproliferationofCAVapplications, theU.S.Departmentof Transportation, alongwith supportfrombothpublicandprivatesectors, hasdevelopeda ConnectedVehicle Reference ImplementationArchitecture (CVRIA, see[Iteris, 2015]), whichcategorizesanddescribesthe foundationofmanyCAV-basedapplications.In addition, EuropehasalsobeenfundingCAV-relatedprojectsaspartoftheirSeventhFrameworkProgramme[EuropeanCommission, 2016]. Theseprojectstackleanumberoftrafficimprovements, includingsafety, mobility enhancement, minimizationofenvironmentalimpacts, energyefficiency, security, andpublic health.InAsia, manyresearchersarealsodevelopingCAV-basedITSapplications.Forexample, JapanisactivelysettingupaRobotTaxisystemtooperatedriverlesscarsandanonlineservice totransportpassengerstostadiumsfortheOlympicsofthefuture[Futurism, 2016].
TobetterunderstandtheimpactsofemergingCAVapplicationsinasystematicway, wehave carriedoutacomprehensiveliteraturereviewovermanyCAVapplicationsthatmaybebroadly classifiedintothreemajorcategories, dependingonthetypeoffocusedobjectsthathavebeen involvedintheapplication’sdevelopinganddeployingprocess.Thesecategoriesinclude:
Vehicle-centric: Vehicle-centricapplicationsrefertoCAVapplicationsthatbenefitthe vehicleitself(i.e., ego-vehicle)and/ortheentiretransportationsystem, usingadvanced sensorsandcommunicationstechnologies.TheseCAVapplicationsaretypicallydesignedto adjustavehicle’sendogenousoperationalparameters(e.g., powertrainandvehicle dynamics), basedonsensingoftheenvironmentandcommunicatingwithothervehicles.
Infrastructure-centric: Infrastructure-centricCAVapplicationsenhanceroadway transportationperformancebymeansofcentralizedsurveillance, management, and analysisviaroadwayinfrastructuresystems.Thereareawide-varietyofcomponentsthat areutilized, includinginductiveloopdetectors, communication-capableroadsideunits, and intelligentTrafficManagementCenters(TMC).
Traveler-centric: OtherCAVapplicationsarefocusedonthetravelerthemselves;for example, someon-roadactiveuserscouldprovideinputontripparameterinformation
1

(usingconnectivitytechnologies), aswellasreceivingroutingguidancebasedonadvanced travelerinformationsystemtechnology.Theseconnectedtravelersmayinclude pedestrians, bicycles, andevenwheelchairs.Thetraveler-centricapplicationsfocuson bridgingtravelerstootherobjectsinthetrafficnetwork, e.g., vehiclesandinfrastructure.
TherearenumerousstudiesallovertheworldfocusingonV2X-basedCAVapplications developmentandalargenumberofresearchactivitiesonimpactassessmentandcost-benefit analysis.Mostprojectsdefinespecificperformancemeasuresandcarry outsometypeof evaluation.ThisisverytypicaloftheUSDOT-sponsoredprojects, aswellasEuropeanprojects. However, veryfewresearcheffortsexaminea comprehensive set ofMOEssimultaneously. Further, thereareonlyafewprojectsthatactuallyfine-tunetheirsystemparametersinorder toachieveawiderangeofco-benefitsacrossdifferenttypesofmeasuresofeffectiveness (MOEs).
TogetfurtherinsightintotheimpactsofemergingCAVapplicationsinasystematicway, we haveestablishedanevaluationframeworkanddevelopedaperformance-orientedtaxonomy basedonthekeymeasuresofeffectiveness.Inthiswhitepaper, wepresenttheframework alongwithapossibleparametertuningstrategy.Thisisfollowedbyadetailedanalysisonthe potentialco-benefitsofsometypicalCAVapplications.ThreespecificexampleCAVapplications arethenanalyzedindetail:HighSpeedDifferentialWarning(vehicle-centricsafety-focused), LaneSpeedMonitoring(vehicle-centricmobility-focused)andEco-Speed Harmonization (infrastructure-centricenvironmentalimpacts-oriented).Foreachoftheseexamples, we describetheexistingtradeoffsandco-benefitsofdifferenttypesofMOEs.Thelastsectionof thiswhitepaperprovidesconclusionsandhighlightsfuture researchdirections.
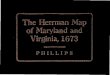
Measure of Effectiveness (MOE) for CAV Applications Byincorporatingadvancedsensors, communicationtechnologiesand automated controlinto today’svehicles, CAVapplications areenhancingsafety, improvingmobility, andreducing environmentalimpacts. Toevaluatethesedifferentimpacts, wehavedevelopedaperformance measureframeworktodefineallofthedifferentmeasuresofeffectiveness(styledaftersimilar cost-benefitanalyses, e.g., [Kaparias and Bell, 2011;Bilaetal., 2016;Chenand Cheng, 2010]). Theoverall performancemeasureframework isshowninFigure1, basedaroundthe three majorperformance areasof safety, mobilityand theenvironment.
Safety
Safety-focusedCAVapplicationsenablevehiclestomitigateroadwayconflictsbydeveloping notificationandwarningmechanismofcollisionavoidancewithregardtobothinfrastructure-basedandvehicle-basedcooperativesafetysystems(see, e.g., [Barbaressoetal., 2014]).A portionoftheseapplicationsfocusdirectly onsafetybenefitstoavoidcrashesandaccidents (e.g., [Lietal., 2016])oreventodetectandpredicton-roadirregulardrivingbehavior(e.g., [Sun etal., 2015]).Othernon-safetyorientedCAVapplications(e.g., mobilityimprovementand/or
2

pollutantemissionsreduction)mayaffectsafetyindirectly, eitherpositivelyornegatively, whichweviewasco-benefitsortradeoffsamongthedifferentMOEs.
Thecommonsafetyperformancemeasuresinclude: • Probabilityofcollision; • Time-to-collision; • Vehicle spacing; • Speeddifferencesbetweenvehicles; • Queuelength; • Numberofcongestionoccurrences;and • Numberofdetectedvehicleconflicts.
Mobility
Tobettermanagetheoveralltransportationsystem, mobility-orientedCAVapplicationsutilize avarietyofstrategiesaimedatincreasingoperationalefficiencyandimprovingindividual mobility.Systemefficiencyisanessentialcomponentforgoodresourcemanagementwiththe objectiveofproducinganacceptableleveloftransportationthroughput[KapariasandBell, 2011].Similartomobility, reliability isanotherkeyfactorofsystemefficiency, concernedwith thingssuchastraveltimevariability, systemusageandtransportationsystemcapacity.
Thecommonmobilityperformancemeasuresinclude: • Averagetraveltime; • OverallDelay; • Vehicle-to-Capacityratio; • LevelofService; • Average/totalspeed; • Vehicle-Miles-Traveled(VMT)/Vehicle-Hours-Traveled(VHT); • Vehicle flow; • Queuelengths; • Averageparkingsearchtime; • Numberoftotalstops;and • On-TimePerformance.
Environmental Impacts
Thetransportationsectorisamajorcontributortoairpollutionandgreenhousegasemissions. ThishasputincreasedattentiononITSandCAVtechnologiestopotentiallyreducenegative environmentalimpacts, includingenergyconsumption.Indeed, asignificantnumberofCAV applicationsnowfocusonhowtoreducethetrafficemissionofpollutantsandreduceenergy use(e.g., see[Barthetal., 2008;Kaparias and Bell,2011]).
3

Thecommonenvironmentalimpactperformancemeasuresinclude:• Energyconsumption; • Criteriapollutantemissions(CO, HC, NOx, PM) • GHGemissions(CO2, N2O, etc.) • Fueluse.
Safety Environmental Impacts
Direct Impact
Reliability
Mobility
Indirect Impact
Accessibility
Special Groups
Indicators library: Spacing; Speed difference; Time-to-collision; Queue length; Number of congestion occurrences; Number of detected critical and non-critical conflicts, etc.
Indicators library: Flow; Queue length; Average travel time; Average parking search time; Average/total speeds; Vehicle-miles-traveled; Vehicle-hours-traveled; Delay; Number of stops; On-time performance; Level of service� Volume to capacity ratio, etc.
Indicators library: Fuel consumption; Energy consumption; Pollutant emissions; Number of stops; Average speed, etc.
Key MOEs Framework
Efficiency
Driving Comfort
Total Covered Area
Social Inclusion & Land Use
Non Electric Vehicles
Electric Vehicles
User Experience
Figure1. OverviewofthePerformance Measurement Framework(measuresinredarethe focus used in this analysis)
Safety, Mobility, Environment Category Summary Asdescribedpreviously, safety, mobilityandenvironmentalsustainabilityrepresentthethree cornerstoneswhenevaluatingtheeffectivenessofCAVapplications. Ofparticularinterestare CAVapplicationsorprojectsthatexplicitlyaccountforelementsofsafety, mobility, and/or environmentalfactors.Tohelpcategorizedifferentapplications, weutilizethegeneralVenn diagramshowninFigure2.ThisVenndiagramallowsustodirectlycategorizedifferentCAV applications;notethatinFigure2, severalexamplesaregiven.
4

Safety
Energy & Environment Mobility
Safety & Mobility: § Collision avoidance § Increased spacings
Safety & Energy: § Electronic Brake Lights § Conservative automated
maneuvers
Mobility & Energy: § CACC § Higher speeds
Figure2.Co-BenefitsandTradeoffsbetweenSafety,MobilityandEnvironmentalfactors.
Literature Survey
Wehavecarriedoutaliteraturesurvey, primarilyaddressingrecentCAVliteraturein2015and 2016.ThegeneralresultsofthesurveyareannotatedinFigure3, andseveralliterature examplesaregiveninTable1.Foreachofthepiecesofliterature, theyarecategorizedintothe areasshowninFigure 2.
Table1. CategorySummaryResultsofCAVApplicationLiteratureSurvey
Safetyfocused (25)
S M E ? ? ?
S M E ?
S M E S M E
15outof25 (60%)
6outof25 (24%)
3outof25 (12%)
1out of25 (4%)
Mobilityfocused (18)
? ? S M E
? S M E
? S M E S M E
7outof18 (39%)
6outof18 (33%)
4outof18 (22%)
1outof18 (6%)
Environmental impactsfocused (15)
? ? S M E
?
S M E ? S M E S M E
7outof15 (47%)
3outof15 (20%)
4outof15 (27%)
1outof15 (7%)
S:Safety; M:Mobility; E:Environmentalimpacts; :Improvement; ?: Unknown, Neutralor Deteriorate
5

High speed differential warning [38]
Chain collision avoidance application and its evaluation based on the stochastic model [16] A cooperative collision avoidance algorithm for a smooth trajectory of each vehicle at blind crossing [35]
Lane change warning system [9] Forward collision warning + precrash brake assist + autonomous precrash brake [27]
Driver steering assistance for Lane-departure avoidance [11] Traffic situation and vehicle’s environment assessment for lane-change recommendations [50]
Warning relevance determination for Emergency Electronic Brake Light [51] Flow control algorithm for freeway work zones based on real-time traffic data [46] Infrastructure Fuzzy controller on longitudinal control for automated on-ramp merging [40] -centric
Self-organized intersection control [64] Motorway accident warning for collision prevention and traffic flow improvement [13] Vehicle-
Cooperative Adaptive Cruise Control [10] centric Artificial Potential Field CACC integrating CACC with collision avoidance and gap closing functionalities [53]
Lane speed monitoring scheme based on lane-level traffic state estimation via connectivity [56] Vehicle-Variable speed limit/speed harmonization for work zones [48] centric
Advanced Traffic Management Systems based on traffic modelling and dynamic network analysis [39] Infrastructur Traffic signal coordination to decrease travel time for emergency vehicles [41],[29] e-centric
Intelligent road traffic signaling system to improve traffic flow and journey time [44] Traveler-Traveler information based en route systems [67] centric Urban parking allocation [66] Vehicle-
Online path planning for electric vehicles [62] centric
An eco-friendly freight signal priority system [30] Infrastructur Platoon-based intersection management [26] e-centric
Speed limitation and control algorithm for curve warning system [18] Queue-end warning system [28]
Infrastructure- Lane occupying probability estimation at urban intersections [52] centric Hybrid collision warning system [55]
Local danger warning system [21]
Vehicle-centric Traveler- Pedestrian protection and collision warning to active road users [1],[2],[8] centric
Infrastructure- Connectivity based Eco-driving using optimal longitudinal control [24] centric Safety
Eco-driving assistance system for driver actions advice [45] centric
Vehicle-Integration of hybrid powertrain and adaptive cruise control [33]
Vehicle-Eco-routing navigation system [3] centric
Eco-speed harmonization strategy for safe and eco-friendly speed in freeways [61] Environmental Infrastructur Eco-approach and departure system providing speed trajectory recommendation using SPaT [63]
Impacts e-centric Mobility Eco-CACC at signalized intersections considering queue effects [65] Model predictive energy efficiency optimization of an electric vehicle [19]Mixed electric bus fleet arrangement for public transit management [54]
Traveler- Inductive power transfer lane design for electric bikes [37] centric
Infrastructure- A real-time lane selection algorithm based on desired driving speed of individual vehicles [25] centric
Figure3.SurveytaxonomyintermsofSMEcategorization.
1

ItcanbeconcludedthatsafetyisthepredominanttargetedfactoramongalltheCAV applicationsaddressedintheliterature.Thereareveryfewstudieslookingintoallpossible MOEssimultaneously, andsynergisticeffects(intermsofallMOEs)ofthesingle-MOE-focused applicationswererarelyaddressedintheliterature.Arecenttrendhasrecentlyemerged, whereaportionofCAVapplicationsarebeingdesignedtoimprovemorethanoneMOE (typicallytwo), however, veryfewCAVapplicationsaddressallthreeMOEs(safety, mobilityandenvironmentalimpacts)simultaneously.Instead, CAVdesigners andresearcherstypicallyusea combinationofdifferent-MOE-focusedapplicationstoachieveimprovementsacrossseveral MOEs, insteadofpotentiallyfine-tuningthesystemparametersofasingleapplication.
ThenextchapteranalyzesthepotentialsynergiesandtradeoffsoverallavarietyofCAV applications.Asstatedearlier, wetakeanapproachinexaminingapplicationsthatarevehicle-centric, infrastructure-centric, andtraveler-centric.
Synergies and Trade-Off Analysis of Typical CAV Applications All on-roadcommunication-capableobjects(e.g., vehicles, bicycles, pedestrians)canpotentiallyshareinformationviawirelessconnectivitytechnologies, suchasusingDedicatedShort-Range Communication(DSRC)devices.DSRCreceiverscanbeassociated withtheinfrastructure(see, e.g., [Kenney, 2011]), orwithmobileobjects.Cellularcommunicationtechnology(e.g., smartphoneswithbuilt-insensors)canalsobeused(see, [Lyaminetal., 2016;Murugesh, 2015]).Theexchangeofinformationbetweentwoterminalscanvarywidely, forexampletransmittinga users’ basicmotiondynamicstotheinfrastructure, helpingincreasetheusers’ environmental awarenesstobenefitthetransportationsystem, therebyhelpingachievepredetermined objectivesinterms oftransportationperformanceimprovement.
SometypicalexamplesofvariousCAVapplicationsinthelatestliteratureareaddressedinthis section, andco-benefits/tradeoffsamongthethreemajorMOEsareanalyzed.Themainresults areinTable3forthe vehicle-centricCAVapplications, Table4fortheinfrastructure-centricCAVapplications, andTable5forthetraveler-centricCAVapplications.Tohelpunderstandthe symbolsusedinTables3, 4, and5, Table2providesthelegendofthesymbols.
Table2.SymbolsforMOEsco-benefits and tradeoffs in the literature review tables
Performance Validated Performance Non-validated Improvement Deterioration Improvement Deterioration Unknown
Targeted ↑ ↓Non-targeted ↑ ↓
1
� � �
� �

Vehicle-Centric CAV Applications
Safety & Mobility Co-Benefits
Aimingatenhancingtrafficsafety, agreatdealofresearchactivityonCAVapplicationshas beencarriedout, primarilyfocusingonroadenvironmentawareness.Basedonmodern communicationstechnologies, alaneclosurealerthasbeenproposedbyFullertonetal., allowingdriverstobenotifiedsoonerregardingemergencysituations, e.g., asuddenlanedrop ormotorwayvehiclebreakdowns[Fullertonetal., 2007].Basedonthesimulationresultsofthis warningsystem, theauthorsconcludedthatagradualslow-downoughttobeenoughtoreduce thepotentialriskoffollow-onrear-endcollisions.Forthissafety-focuseddriveradvicesystem, thereliefofbottleneckscongestionhasgreatpotentialtoincreasethecapacityoflaneclosure areastosomeextent, leadingtoamobilityco-benefit.AnothertypicalexampleofaCAV applicationthataimstoimprovebothtrafficflowandsafetyare Cooperative Adaptive Cruise Control(CACC) systems(see, e.g., [Semsar-Kazeroonietal., 2016]).Deyetal.presentedan overallreviewofCACCsystem-relatedperformanceevaluation.Inadditiontoaforward-looking radarusedtopreventpotentialconflicts, itwasconcludedthattheCACCapplicationalsohas thesignificantcapabilityofenhancingmobilitybyincreasingthetrafficcapacity(improving trafficflow)undercertainpenetrationrates, andbyharmonizingthespeedsofplatoonsina safemanner[Deyetal., 2016].
Safety Benefits
TheForwardCollisionWarningapplicationisarelativelymatureapplication, commonlyusedto improvesituationawarenessandenhancesafetyperformance.Theeffectivenessamong severalpre-collisionsystemalgorithmswasexaminedusing Time-to-Collision(TTC)asa surrogatecollisionriskevaluation(see, e.g., [KusanoandGabler, 2012]).KusanoandGabler provedthatperformanceoftheconventionalforwardcollisionwarningwassignificantly improvedbyintegratingapre-crashbrakeassistanceaswellasanautonomouspre-crash brakingscheme.Similarly, Szczureketal.presentedanEmergencyElectronicBrakeLight application-relatedalgorithm, showingsafetybenefitsrepresentedbytheloweraverage numberofcollisions[Szczureketal., 2012].Inthiswork, onlythepotentialsafetybenefitswere analyzed;thepotentialmobilityandenvironmentalimpactsgains/losseswerenotaddressedin both[KusanoandGabler, 2012]and[Szczureketal., 2012].However, thesafetybenefitsthat aredescribedmightbeachievedattheexpenseoflargergreenhousegas(GHG)emissionsdue toincreasedstop-and-gobehavior.Thismighthappeninothersimilarsafety-orientedcollision avoidanceapplications, e.g., intersectioncollisionwarnings, curvespeedwarningsand pedestrianwarningsystems, wherestop-and-goactivitywilllikelyincrease.
Safelychanginglanesisoneofthehighestconcernsformanydrivers;assuch, lane-change warningsystemsandlane-changeassistsystemshavebeenattractingincreasingattention. Schubertetal.fusedon-boardcamerasandadecision-makingapproachtoexecuteautomatic lane-changemaneuvers, andtestedthealgorithmonaconceptvehiclecalledCarai[Schubertet al., 2010].However, detailedquantitative effectivenessevaluationregardingtrafficsafetywas
2

notevaluatedinthisreference.Inaddition, Dangetal.takeintoaccountthedrivers’ reaction delayandbraketimeandproposedareal-timeminimumsafedistancemodel[Dangetal., 2014]. ThesimulationresultsobtainedfromSimulinkshowthatthissystemgeneratelane changewarningwiththeassistofTTCanalysis, however, nootherMOEsevaluationwas mentionedotherthanpotentialsafetyimprovements.
Environmental Impacts & Safety Co-Benefits
Some co-benefitsintermsofsafetyaspectscanbewellachievedbyfinetuningsystem parametersofenvironmentalimpacts-orientedCAVapplications.Inthisdirection, anAndroid systembasedecodrivingapplicationwasdevelopedbyOrfilaetal., comprisingtheintegration ofupcomingroadfeaturesrecognitionandcrashrelevanteventsidentificationmodules, estimatingtherecommendedspeedwiththepurposeofsupplyingdriversaneco-friendly speed[Orfilaetal., 2015].Eventhoughoneoftheobjectives wastoimprovethe safety performance, potentialsafetyeffectivenesswasnotevaluated, onlythefuelsavingsresults. Furthermore, thespeedswiththeproposedsystemareslowerprobablyduetothesafeeco-drivingsystemthatcontributestothesteady-speed, smooth-decelerationbehavior, therefore resultinginreducedmobilitywithlongertraveltimes.AnotherapproachwasproposedbyLiet al.withtheaimofachievingenvironmentimpactsimprovementaswellassafetyimprovement. AhybridpowertrainwasincorporatedwiththeconventionalAdaptiveCruiseControl(ACC)(see [Lietal., 2012]), aimingtoenhancetrafficsafetyandtoreducethedriver’seffort.Bycomparing velocityprofilesofvehicleswithoutandwiththeproposedsystem, Lietal.showedthat vehicles’ velocityprofilesoftheproposedsystemaresmootherwithlowerovershoot. Moreover, sincethestudytakesadvantageofthehighfuelefficiencyschemeofhybridelectric systems, theenginetorqueandfuelimprovementwerealsoinvestigatedinthispaper.
Environmental Impact Benefits
Asfortheenvironmentalimpacts-focusedCAVapplications, eco-routingsystemsarevery beneficialtotheenvironment.Boriboonsomsinetal., proposedaneco-routingnavigation system, fusingmultiple-sourcestravelerinformation, incorporatingtheoptimalroute calculationengineandthehuman-machine-interfacetoreducefuelconsumptionandpollutant emissions[Boriboonsomsinetal., 2012].Thetrade-offbetweenmobilityandenvironmental impactsoftheproposedsystemisdescribedinthispaper.Theauthorsconcludedthat significantfuelsavingscanbewellachievedfromeco-routescomparedtothefastestroute, leadingtotraveltimeincreases.Thetradeoffbetweentraveltimeandfuelconsumptioncanbe seeninmanyenvironmentally-focusedCAVapplications.
Environmental Impacts and Mobility Co-Benefits
Somemobility-orientedCAVapplicationsarefocusedonpathplanning.Forexample, Winteret al., presentedanonlinemicrogeometricpathplanningmethodologyusingcurvature minimizationalgorithmtodecreasetraveltime.Simultaneouslythemaneuverablerobotic electricvehicleresearchplatformROboMObilwasusedtoachievetheenergysaving[Winteret
3

al., 2016].Ontheotherhand, resourceallocationisanotherapproachtoimprovebothmobility andenvironmentalimpacts.Zargayounaetal.proposedtheresourceallocationmodelto achievethemanagementofparkingspotsinanurbanareatakingintoconsiderationboththe locationandtheresourcesavailabilitymoment[Zargayounaetal., 2016].Theurbanparking managementisexpectedtoreducefuelconsumptionbydecreasingparkingspotssearchtime.
Mobility Benefits
ThereareveryfewCAVapplicationspurelyfocusingonmobilityimprovementstodate.A freewayworkzoneharmonizerhasbeenproposed, whichwasmainlydesignedtocontrol shockwavepropagationandtoreducetraveltimedelay[RamezaniandBenekohal, 2015]. Congestiondurationandtraveltimedelaywereevaluatedanditturnedoutthata minimum penetrationrateofequippedvehiclesmustexisttoguaranteethesatisfactoryefficiencyofthe proposedsystem.AnotherapplicationcalledLaneSpeedMonitoring(LSM)systemhasbeen studiedin[Tianetal., 2016], whichwasproposedtoestimate lane-leveltrafficstateandto advisethedrivertochangetoafasterlane, targetingimprovedtraveltimes.Theaveragespeed ofequippedvehiclesandunequippedvehicleswerecompared, andthefuelconsumptionand potentialconflictfrequenciesarealsoinvestigatedin[Tianetal., 2016].Highervelocityis achievedforequippedvehicles, whereasthefuelconsumptionandpotentialconflictof equippedvehiclesarehigheraswellduetotheencouragementofmoreaggressivedriving behaviors(e.g., frequentlanechangesandhigherspeed).
4

Table3.Vehicle-centricCAVApplications
Categories Platform Project/Application name & Ref
MOE focus Contributions S M E
Vehicle-centric
Non-EV
MINECO/FEDER Project [16] ●↑ � �
A stochastic model as the surrogate measure for accidents evaluation of cooperative chain collision warning applications
FP7 European project ecoDriver [45] �↑ �↓ ●↑
An Android based application taking into account upcoming events, evaluation and analysis of driver behavior to advise drivers the best actions for lower energy consumption
EU 7th Seventh Framework Programme research project SOCIONICAL [13]
�↑ ●↑ �
An emergency situation alert system which leads into a larger “buffer zone” of reduced and harmonized speed in the vicinity of motorway bottlenecks in order to ensure a smoother and safer traffic flow
Automatic Lane-Change [50] �↑ � �
A situation awareness-based automatic lane-change scheme based on image processing, Kalman filtering and Bayesian networks approaches
Emergency Electronic Brake Light [51]
● ↑ �↓ �↓ A machine learning approach-based emergency brake warnings relevance-decision estimation for safety applications
Lane Change Warning [9] �↑ � �
A V2V-based lane change warning system by analyzing safe distance between ego-vehicle and surrounding vehicles in the original lane and the target lane
Cooperative Adaptive Cruise Control [53]
�↑ �↑ � An analysis on gap closing and collision avoidance functionality of the Cooperative Adaptive Cruise Control system
Advanced Forward Collision Warning [27]
●↑ �↓ �↓ A pre-collision system integrating forward collision warning, pre-crash brake assist and autonomous pre-crash brake to reduce severe highway crashes
Eco-routing navigation system [3] � �↓ ●↑
An eco-routing navigation system accommodating origin-destination inputs through user interfaces to assist the driver to find the most eco-friendly route
Cooperative Adaptive Cruise Control [10]
�↑ �↑ �
A review of Cooperative Adaptive Cruise Control systems which have the potential to improve traffic throughput by increasing the roadway capacity and to harmonize speed of the moving vehicles platoon in the safe manner
Urban parking management [66] � �↑ �↑
Online localized cooperative resource allocation models for urban parking management to decrease available parking spots search time
Connected Vehicles Harmonizer [48] �↑ ●↑ �↑
A connected vehicle-based shockwave propagation control system using an optimization program to reduce travel time in the freeway work zone bottleneck
Lane Speed Monitoring [56] �↓ ●↑ �↓
A lane speed monitoring system using basic safety message exchange between communication-capable vehicles to advise the driver faster lane to change to
EV
Adaptive Cruise Control [33] �↑ � ●↑
An intelligent hybrid electric vehicle (i-HEV) platform incorporating a hybrid powertrain scheme with the adaptive cruise control application to achieve comprehensive performance
Online Path Planning [62] � �↑ ●↑
A real-time micro path planning algorithm tested on the robotic electric vehicle research platform ROboMObil together with the velocity profile generation to make the energy saving capabilities achievable
S: safety; M: mobility; E: environmental impacts
5

Infrastructure-Centric CAV Applications
Infrastructure-centricCAVapplicationsaretypicallytargetedattrafficperformance improvements(i.e., mobility)andiswellstudiedintheliterature.Theseinfrastructure-centric applicationscanbefurtherdividedintotwogroupsbasedonthecontrolstrategyimplemented: adecentralizedapproach(controlledbylocalinfrastructure)andacentralizedapproach (controlledbyacentralizedtrafficmanagementcenter).
Safety & Mobility Co-Benefits
Thefundamentaltaskof localizedinfrastructureindecentralizedinfrastructure-centricCAV applicationsistocollectandrelaythevehiclesinformationwithinacertainrange.Anumberof studieshaveexploreddecentralizedcontrolstrategies.YangandMonterolaproposedaself-organizedapproachwhereeachindividualvehicleapproachingasignalizedintersectiongoverns itsownmotiondynamicsbyusingtheequippedintersectioncruisecontroldevicetogetherwith thebeaconastheinformationrelayofapproachingvehiclesin theintersectionsofurbanarea [YangandMonterola, 2016].Sincefullystoppingrightbeforecrossingtheintersectionreduces thecapacityoftheintersection, theproposeddecentralizedtrafficcontrolsystemsmoothens theindividualvehicledynamicsandactivelyhelpseliminatehumandrivererrorstoguarantee theoverallsafetywhenvehiclespassthroughtheintersections.Fundamentaltrafficflow diagramswereplottedandcomparedin[YangandMonterola, 2016], wheretheproposed controlscheme’spositiveeffectstotheintersectioncapacitywereillustrated.Directtestson safety, environmentalimpactsandothermobility-relatedindicatorswerenotinvestigatedin thisstudy.However, basedonourparameterstuningstrategyanalysis(nextsection), itis expectedthatthefuelconsumptionlikelydecreasessincetherearesmoothertrafficflowsin theintersectionsandmoreefficientbrakingoperations.
Therearemanylanemergingcontrolschemesthatoperateinadecentralizedmanner;for example, Milanésetal.proposedanon-rampmergingsystemconsistingofareferencedistance decisionalgorithmandafuzzycontrollertooperatethevehicle’slongitudinalcontrol, basedon informationacquiredfromthelocalizedinfrastructure[Milanésetal., 2011].Thestudy investigatedtheperformanceoftheproposedsystemthroughreal-worldexperiments, and Milanésetal.showedhowthreevehiclescoordinateinordertoalleviatethecongestionand improvetrafficflowinamergingsituationbypresentingthe trajectories, speedprofilesand relativedistancesresults.Inasimilardirection, PeiandDaipresentedanintelligentlane-merge controlsystemforfreewayworkzones[PeiandDai, 2007].PeiandDaiusedatraffic-informationcollectionsystemtocomprehensivelyidentifytrafficstates(e.g., trafficvolume, velocityandoccupancy)andimplementedvariablelanemergestrategyinVISSIMsimulation softwaretoproducemobility-relatedperformanceindices, suchascapacity, delayandqueue length.Moreover, performanceintermsoftheobservedcollisionsnumberwascompared amongseveralmergecontrolstrategies.
6

Safety Benefits
Asdescribedearlier, mostreportedinfrastructure-centricapplicationsalsofocusonsafety benefitsintermsofcollisionmitigation.Asasafety-orientedapplicationbasedonvehicle-infrastructure-driverinteraction, anadvancedcurvewarningsystemwasproposedin[Glaseret al., 2007]asaspeedlimitation/harmonizationschemeoncurvyroadways.Theproposed systemwastestedinMatlab/Simulink, integratingtheupcomingroadgeometryfeatureanda safespeedimplementationmodule.Similarto[Fullertonetal., 2007], aqueue-endwarning systemwaspresentedin[Khan, 2007]wherenumeroussensorsandanartificialneuralnetwork model-basedalgorithmwereusedtopredictqueue-endlocation.Theinformationwas displayedonportablevariablemessagesignstoavoidrear-endcollisionsinhighwaywork zones.VISSIMwasutilizedtotestthequeueformationanddisseminationinhighwaywork zones.Anotherexampleofsafety-focusedapplicationhasbeenpresentedin[Schendzielorzet al., 2013], whereasafety-criticalsituationsawarenesswarningsystembasedonlaneoccupying probabilityestimationalgorithmviavehicle-to-infrastructurecommunicationwasproposed withthepurposeofimprovingon-road-users’ safetyatintersections.
Therearemanyexamplesofcentralizedtrafficmanagementcenter-basedCAVapplications benefitingsafety.Asreportedin[Taketal.2016], ahybridcollisionwarningsystem, integrating macroscopicdataacquiredfromloopdetectorsandmicroscopicinter-vehicleinformationdata obtainedfromon-boardsmartphones,wasproposedtodescribepotential collisionrisksin dividedroadsegmentsusingadeceleration-basedsurrogatesafetymeasure.Usingacloud centertactic, thesystemefficiencycouldbeincreasedbyloadingcomputationtaskson individualsmartphones.Thecollisionrisks, hereindefinedasaratiobetweentherequired decelerationandtherepresentativemaximumbrakingperformance, werecomparedamong severalcollisionwarningsystems.Taketal.concludedthattheproposedsystemoutperforms othercollisionwarningsystemsbecauseofhigheraccuracyduetodatafusionfrommultiple sources[Taketal.2016].Otherthandrivingbehaviordata(e.g., spaceheadwaydifference, velocitydifferenceandaccelerationdifferencebetweenthesubjectvehicleandthelead vehicle), mobilityandenvironmentimpactsperformancewerenotexplicitlymeasured in[Tak etal., 2016].Anothertypicalexampleofsafety-focusedCAVapplicationisthedanger-notification-disseminationscheme.Hauptetal.presentedalocaldangerwarningsystem, which usedacentralinformationserviceandequippedsmartphoneswithbuilt-insensorstocollect localabnormalsituations(e.g., collectivefullbrakingbehaviors, congestionandtightcurves)to disseminatewarningstoapp-enabledvehiclesinthevicinityofhazards[Hauptetal., 2013].It wasconcludedthatthepotential congestionandcollisionriskscausedbythedangerous situationsshouldbeavoidableandreduced, whereasnodirectresultswereinvestigatedin [Hauptetal., 2013].
Environmental Impact Benefits
Toachievevehicleemissionsreductionfromtransportationsystems, Wuetal.proposedan eco-speedharmonizationschemeforreducingtheoverallfuelconsumptiononfreewaysusing mutualvehicle-to-infrastructurecommunication[Wuetal., 2015].Intheproposedmethod,
7

individualvehiclescommunicatewithinfrastructureontheassociatedroadsegmentand calculateasafeeco-friendlyspeedbasedonaspeeddeterminationscheme.Itisinterestingto notethateventheproposedstrategywasproposedwithafocusonenvironmentprotection, therearcollisionsmightbemitigatedaswellduetotheharmonizedspeeds.
Similarly, apopularenvironmentally-focusedapplicationistheeco-approachanddeparture systemassignalizedintersections.Asanexample, thisapplicationishighlightedin[Xiaetal., 2013],wherethesignalphaseandtiminginformationfromthetrafficsignalcontrollertogether withprecedingvehiclesinformationwasutilizedtosupplyspeedandaccelerationguidanceto thedriverinaneco-friendlyway.Thefuelconsumptionsavingsproducedby the ComprehensiveModalEmissionsModel(CMEM)wascompared, andresultsshowthatthereis higherfuelsavingsasthepenetrationrateofequippedvehiclesincreases.Themobilityand safetyperformancemeasureswerenotestimatedin[Xiaetal., 2013].Nevertheless, the individualvehicle’sspeedisoftensmoothedwhenpassingthroughtheintersection, possibly leadingtoadecreaseofpotentialrear-end collisions.
Yangetal., proposedaneco-CACCsystemtoobtainfuelsavingsatsignalizedintersections [Yangetal., 2016].Theproposedsystemusedaqueue-length-predictionalgorithmandafuel efficiencyoptimizationproblem, recommendingthevehicletrajectoryandadvisingthedriver whentoapproachtheintersectionstopbar(rightafterthelastqueuedvehicleisdischarged) andhowtostop(e.g.speedandaccelerationadvice).Thereisaminimumpenetrationrate valuerequiredforoverallintersectionfuelefficiencyimprovementforthemulti-lanescenario. Besidestrajectoryandfuelsavings, safety-relatedandmobility-relatedresultswerenot mentioned, however, potentialconflictsandcongestionaresupposedtobemitigatedduetoa decreaseofthequeuelength.Anothereco-drivingapproachhasbeenproposedin[Jinetal., 2016], wherealongitudinalcontrolapproachbasedonenergyconsumption-minimizedwas used, takingintoaccountboththeinnervehicle’soperationsandtheoutertrafficandroadway conditionstoevaluatethefuelsavings.Atthesametime, asafeheadwayprinciplewas embeddedintothisproposedsystemaswelltoachievesafetybenefits.
Savingfuelbytakingadvantagesof(hybrid)electricvehicleisanemergingandattractive researchtopicaswell.Avarietyofresearchactivitiesonelectricvehiclesandelectricbuses havebeencarriedout, withthepurposeofincreasingenergyefficiencyandreducingemissions. GuanandFreypresentedamodelpredictiveenergy-efficiency-optimizationsystemusinga power-trainmodelandtrafficlightssequencesinformationtoincrease energyefficiencyofthe electricvehicles[GuanandFrey, 2016;Santos, 2016].
8

Table4.Infrastructure-CentricCAVApplications
Categories Project/Applicati on name & Ref
MOE focus Contributions
S M E
Infrastructur e-centric
Decentralized
A*STAR SERC “Complex Systems” [64]
��� �↑ �↑ An self-organized intersection control algorithm to smoothen intersection traffic flow and to increase the intersection capacityin urban area with safe and efficient operations on individual vehicle dynamics control
AUTOPIA [40] �� �� �↑ An automated on-ramp merging system which consists of the distance reference system and a fuzzy control on vehicle’s longitudinal control to improve traffic flow and congestion in a merging situation
REM 2030 [19] � � �↑ A model predictive energy efficiency minimization system implemented on the electricvehicle
SAFESPOT [52] �� � � An intersection safety-critical situation awareness application based on lane occupying estimation via vehicle-to-infrastructure communication
AERIS [61] �↑ � �↑ An eco-speed harmonization scheme using V2I and I2V to smooth the individual vehicle’s speed profile and to reduce the overall energy consumption
AERIS [63] �↑ �↑ �↑ An eco-approach departure application which utilizes SPaT and preceding vehicles information to guide drivers to pass through intersections smoothly
The 11th Five National Science and Technology Research Item [46]
�↑ �↑ �↑ An intelligent lane merge control system using traffic information collection, state estimation and variable merge strategy to improve safetyand trafficflow in freewaywork zones
Queue-end warning [28] �� � �
A queue-end location prediction algorithm using artificial neural network together with sensors and on-road message signs to reduce rear-end collision in highway work zones
Eco-CACC-Q [65] �↑ �↑ �↑ An eco-cruise control system using shockwave prediction by SPaT messages and V2I information to refer the driver fuel-optimum trajectory at the signalized intersections
Connected Eco-Driving [24] �� �� �↑
A vehicle’s longitudinal control system considering inner driving operation and outer on-road factors to increase energy efficiency in the safe manner
Curve warning system [18] �� �� ��
A speed limitation algorithm that integrates the upcoming road geometry and a safe speed decision scheme to achieve safe driving in sharp curves
Platoon-based MAS-IMA [26] �↑ �↑ �↓ A multi-agent intersection management system based on
platoon formation to increase mobility performance
Optimal lane selection [25] �� �↑ �↑
An optimal lane change selection algorithm using on-road and desired speed of individual vehicles to regulate traffic flow and reduce negative impacts induced by uncoordinated lane changes
MA based Freight Signal Priority [30]
�↑� �↑ �↑ A regulation scheme of signal timing for freight vehicles priority in order to increase travel time and reduce fuel consumption
Centralized
ADIS/ATMC Applications [39]
Hybrid collision warning system [55]
�
�↑
�↑
�↓
�
�↓
A dynamic traffic assignment model seeking optimal assignment of vehicles to the network for route guidance
A hybrid collision warning system with integration of NGSIM loop detectors data,vehicle-to-vehicle smartphones information and cloud center to offer the driver potential collision warnings and to decrease collision risks
Local Danger Warning System [21]
�� � �
A central information service and smartphone-based on-road dangerous situation awareness system to alleviate further dangers caused by congestion, full braking and tight bend
S: safety; M: mobility; E: environmental impacts
9

Environmental Impact and Mobility Co-Benefits
AMulti-agentsystems(MAS)approachtotrafficoperationturnsouttobeanotherfrequently usedmethodtoregulatetrafficflowandtosavefuelconsumption(see, e.g., [Jinetal., 2013; Jin etal., 2014;Karietal., 2014]).Aplatoon-basedintersectionmanagementsystemwasproposed in[Jinetal., 2013], aimingatimprovingmobilityandenvironmentalsustainabilitybyforming vehiclesplatoonsusingconnectedvehiclestechnologies.Theintersectioncapacityisincreased duetotheplatooningvehicles, thereforethetraveltimeisreducedcomparedtotraditional trafficlightcontrolandnon-platoonintersectionmanagementschemes, andsafetymightbe improvedduetotheplatoonformationaswell, however, slightlyhigherfuelconsumptionis introduced(validated).MAScanbeappliedtonotonlylongitudinalmaneuversbutalsolateral maneuvers.Jinetal.alsoproposedareal-timeoptimallaneselection algorithmwhichalso regulatestheuncoordinatedlanechangesofvehiclesonalocalizedroadsegmentbasedonthe laneoccupied, speed, locationanddesireddrivingspeedsofindividualvehicles[Jinetal., 2014]. Theoverallconflictnumberwastargeted tobezeroinanoptimizationproblemandithasbeen validatedthattheaveragetraveltimeandfuelconsumptionarereducedatthesametime.
Makinguseoffreightsignalprioritybasedonaconnectivity-basedsignalcontrolalgorithm, Kari etal.addressedtheissueofhighNOxemissionsfromfreightvehiclesatintersections. Comparedtofixedsignaltimingcases, boththefuelconsumptionandthetraveltimehave beensavedduetobettertrafficregulation, whichbenefitsnotonlyfreightvehiclesbutalso othervehicles[Karietal., 2014].Besidesthefreight-vehicle-priorityalgorithm, thereweresome studiesdoneinordertoleadtoasafeandsmoothtrafficsocietybyusingsignalpreemption systemsforemergencyvehicles(see, e.g., [Miyawakiet al., 1999]and[Kangetal., 2014]).Table 4listssomeoftheinfrastructure-centricCAVapplicationsfromtheangleofco-benefitsand tradeoffsamongdifferentMOEs.
Traveler-Centric CAV Applications
Safety Benefits
Pedestrianprotectionisoneoftheurgentchallengesneededtobesolvedinordertoenhance pedestriansafety.AninterestingsurveyinthisdirectionwascarriedoutbyGandhiandTrivedi, whichmainlyfocusesonpedestriandetectionusingsensorsinvehicleandinfrastructure, and collisionavoidancebasedoncollisionpredictionwithpedestriandynamicsandbehavior analysis[GandhiandTrivedi, 2007].Inadditiontocomputer-vision-basedpedestriandetection techniques, therearealsoafewstudiesonpedestrianprotectionthroughV2X communications (see, e.g., [Andreoneetal.2007];[Anayaetal., 2014];[Dhondgeetal., 2014];[Greeneetal., 2011]).Anapproachtoavoidingaccidentsbymakinguseofsensorsandcommunication technologiesisdescribedin[Andreoneetal., 2007].The contributionsfocusonsafety enhancementofactivevulnerableroadusers(pedestrians, cyclistsorpoweredtwo-wheelers) inacooperativeway.TheproposedWATCH-OVERsystemcanbetriggeredwhenthereisa certainrisklevelmeasuredbycollisiontrajectoriesandsendanalerttoboththeequipped
10

vehicleandtheactiveon-roadtraveler(s)topreventanyroadaccident.Similarprojectsinclude V2ProVuandWiFiHonk, describedin[Anayaetal.2014]and[Dhondgeetal., 2014].These projectsutilizedacommunicationdeviceNexCom(installedwiththeIEEE802.11ganda conventionalGPSchip)andasmartphone-basedbeaconwithaWi-FibasedVehicle-to-Pedestrian(V2P)communicationsystem, respectively.In[Dhondgeetal., 2014], theprobability ofcollision wasdefinedastheratiobetweentherequiredtimetostopandthetimeavailableto stop, whichwastestedandcomparedwithaconventionalWi-Ficommunicationmethod.
Mobility Benefits
Inadditiontothesafetyapplicationsdescribedabove, multimodaltravelerinformationbased trafficsituationawarenesssystemshavebeendevelopedinordertodetectuserstravelmode andtoprovidefurtherproperroutingsuggestion.Zhangetal.proposedaniPhone/Android-enabledPath2Goapplicationwhichissupposedtoimprovethemobilityofequippedusers, fusingtheGPSdatafrombothtransitvehiclesandsmartphones, detectingmobileusers’ activity, differentiatingtheuser’spropertravelmodeandsupplyingproperroutingadvice (includingmodechoices)tousers [Zhangetal., 2011].Theperformancetestoftheproposed applicationwascarriedoutonCalTrainandseverallocalbusroutes, andthecorrection detectionrateisashighas92%.Table5listssomeofthetraveler-centricapplicationsfromthe differentMOEsbenefitsperspective.
Table 5. Traveler-basedCAV Applications
Categories Project/Application name & Ref
MOE focus Contributions
S M E
WATCH-OVER [1] ��� � � A cooperative system framework integrating sensors and V2X communications to prevent road accidents that involve vulnerable active road users
V2ProVu [2] ��� � � A pedestrian protection application using Wi-Fi based NexCom devices for V2P communication for vehicle presence informing and/or hazard alarming
Traveler-based
Path2Go [67] � �� �
A context-awareness routing service based on real-time Multi-Model traveler information to match proper travel modes and to provide users further route information
WiFiHonk [8] �↑ � � A collision estimation algorithm between providing issue warnings using the beacon stuffed Wi-Fi communication
[37] � �� �� A dynamic inductive power transfer lane designed for electric bikes
S: safety; M: mobility; E: environmental impacts
11

Parameter Tuning Strategies Asseenintheliteraturedescribedabove, a numberoftraffic-relatednetwork-wideparameters can haveanimpactonperformanceofvariousCAVapplications.Somesystemparameters are not readilycontrollable; forexample, thepenetrationrateofCAVapplication-equipped vehicles andtrafficvolume.However, other system-wideparameters existthatarecontrollable, for example vehicledynamics-related parameters(e.g., car-followingparameters), infrastructure-related (e.g., rampmetertiming), andpowertrain-relatedparameters (e.g., gearselection).To be more specific, vehicledynamics-relatedparametersincludetrajectoryplanningandother vehiclemaneuvers;Infrastructure-relatedparametersconsistofsignalphaseandtimingsuchas thered/greentimeratio;Powertrain-relatedparameterscompriseregenerativebrakingand A/Cpowerusage.
Ratherthansetthecontrollableparametersatfixedvalues, itispossibleto“tune”an applicationwithdifferentbenefitsintermsofsafety, mobilityandenvironmentalimpacts.The ultimategoaloffutureCAVapplicationsistoachieveperformanceimprovement across all aspectsofsafety, mobilityand environment/energy.Bytuning thecontrollable system-wide parametersofasingleapplication, positivesynergisticeffects may be achieved, intermsof improvementofallMOEs(seeFigure 4).
Asan example, ifa vehicle’strajectory isdesignedforsafetypurposes, itmayalsobe smoothed formobilityandenvironmentalimpactreduction.Further, a vehicle’spath maybebetter planned out, or the vehicle’smaneuvers maybe adjusted(suchas formingplatoons), inorder toimprove safety-focusedCAVapplications withimprovementsinmobility, duetoanettraffic network’scapacityincrease.Vehicle maneuvers using steadyspeedsandsmooth accelerations/deceleration may beembeddedintothesafety-orientedCAVapplicationsaswell toobtainfuelconsumptionsavings.Further, wecanachieveenergysavingsaswell, byadjusting endogenous operations(e.g., enginedynamics andtransmission, regenerativebrakingandA/C powerusage), andbyintegratingexogenousinformation(e.g., signalphaseandtiming).Onthe otherhand, synergisticsafetybenefitsofmobility-focusedandenvironmentalimpacts-oriented applicationscanbeachievedthroughadd-onconservativeautomatedmaneuvers, front/rear radarsandincreasedspacing, forexample.SometypicalCAVapplicationswereanalyzedfrom theperspectiveofpossiblesystemparameterstuningandpotentialMOEsco-benefits.
12

Safety
Mobility Environmental Impacts
S M E
S M E ? ?
? ? S M E
? ? S M E
? S M E
? S M E
? S M E
Smoothed trajectory;
increased
capacity
Harmonized/steady
speeds;
Path
planning
Smoothdeceleration
Increasedspacings Conservative
automated
maneuvers
Efficient
AC usage
Fron
t rad
ar(ACC
/CAC
C)
Harmonization ofspeeds of platoon
Figure 4. ParameterstuningstrategydiagramintermsofMeasuresofEffectiveness(MOEs)
Specific Case Studies Tocompleteour study, we selected three CAV applications thatwere recently intheliterature foramorein-depthanalysis.TheCAVapplicationsinclude HighSpeed DifferentialWarning (HSDW, vehicle-centric), LaneSpeedMonitoring (LSM, vehicle-centric), andEco-Speed Harmonization(ESH, infrastructure-centric).Intheseapplications, itisassumedthat information(suchasinstantaneousspeedandlocation)canbeobtainedviaV2V communicationintheform ofBasicSafetyMessages(BSM)[Kenney, 2011].Byexchangingsuch informationwithin aspecific communicationrange, the vehicle-centricHSDWapplication can identifydifferentscenarioswherehigh-speeddifferentialsexistbetweenthe ego or host vehicleand thesurrounding remotevehiclesonthecurrentlaneoradjacentlanes. The application canthen providethedriverwithguidanceondecelerationoperation, aimingto reducetheriskofcollision throughtimelydeceleration [Lietal., 2016].
TheLSMapplicationwasmainlydesignedtoachievemobilitybenefitsintermsofaverage speed(oraveragetriptraveltime)bymonitoring real-timelane-leveltrafficstateinthe downstreamandadvisingthedriverthefasterlanetotravelin.TheLSMapplicationbelongsto themobility-focusedvehicle-centricapplicationcategory, however, safetyandenvironmental impactswerenottakenintoconsiderationwhenthisapplicationwasinitiallydesigned. Weset upa simulation oftheoperation, suchthat thedriver-vehicle-unitsequippedwiththeLSM functionwouldchoosetochangeto a target (moreadvantageous) laneafterestimatingand comparingthedownstreamtrafficstate.This lane-change advice often leads tomorefrequent
13

lanechangeoperationsthanusual. Otherthan mobilityimpacts, theothertwoMOEsofthe LSMapplicationwereexpectedtodeteriorateduetoaggressivedriverbehavior (e.g., higher speedsandfrequentlanechangeoperations), whichisviewedasatradeoffbetweenmobility andsafety/environmentalimpacts.
TheESHapplicationbelongs in theinfrastructure-centricapplicationcategoryandwasprimarily designedtoreducefuelconsumptiontoprotecttheenvironment.Aspeedharmonization schemewasusedtosmooththespeedsofvehiclesequippedwiththeESHfunction.Inthe simulation, thedriver-vehicle-unitswiththeESHfunctionwereadvised totravelata proper velocity, helping regulatetrafficflowbasedon downstream trafficconditions.Thepurposeof thespeedharmonizationstrategyistoreduceunnecessarystop-and-gobehaviorandto encouragesmoothdrivingatenergy-efficientspeedsfor the entiretrafficflow. Sincehard brakingbehavior is weakenedbytheESHapplication, thepotentialconflictriskswereexpected tobemitigatedaswell, whichisviewedasaco-benefitbetweenenvironmentalimpactsand safety.Formoredetailsofthethree applicationsplease referto[Lietal., 2016]; [Tianetal., 2016]; and [Wuetal., 2015].
Performance Indicators
Inthissection, weexaminethesethree applications in detail, illustrating thetradeoffsandco-benefitsofseveralmajorMOEs, i.e., safety, mobilityandenvironmentalsustainability.Three performanceindicatorswereusedtorepresentthesethreeMOEs.Forsafety, weconsider averageconflictnumber (theprobabilityofacrash).Formobility, weuseaveragetraveltime. Andforenvironmentalimpacts, we use averagefuelconsumption.Theperformancemeasure results(averagespeed, traveltime, andaveragefuelconsumption) are generatedfromthe microscopictrafficsimulationsoftwarePARAMICS, whichwasdevelopedtomodelthe individualvehiclesdynamics behavior, andtoconnectcontrolschemesandon-roadusers throughanApplicationProgrammingInterface(API)[Paramics, 2015]. AParamics APIcalculates theaggregatedtraveltimeresults, vehicle-miles-travelledandvehicle-hours-travelled.The United States Environmental Protection Agency(USEPA) MOVESmodel(USEPA, 2015)was embeddedintheAPIandthetailpipeemissionswerecalculated inthe APIaswell.Asfor the conflictnumbercalculation, PARAMICSproducesamassivevehicletrajectoryfile, which isthen usedasinputinto theSurrogateSafetyAssessmentModel(SSAM).SSAMthen postprocesses thedataandgeneratesa potentialconflictnumber associatedwithvehicleIDs[Federal Highway Administration, 2015].
Simulation Model and Scenario
Regardingthesimulationscenario location, California freewaySR-91Ewasselectedasthe networkmodelwhichhasbeencalibratedintermsoftrafficdemandanddrivingbehavior basedondataofatypical weekdaymorninginthesummer[Barthetal., 2006].Theoverall trafficdemandis25,000vehiclespersimulationrun, whichiscategorizedastheLevelOf Service(LOS)DaccordingtotheHighwayCapacityManual(HCM)2010[TRB, 2010].
14

The HSDWapplication, the LSMapplicationandtheESHapplicationwere evaluatedunder differentscenarios.Thepenetrationrateof application-equippedvehiclesisanimportant dimensionwhenevaluatingthetrafficflowimpactsandoverallperformancemeasure.Inthis study, twopenetrationratesof theapplication-equipped vehicleswereselected, i.e., 20%and 80%, togenerallyobservethetradeoffs/co-benefitsofthethreeMOEs, regardingthethree selectedapplications.
Numerical Results and Tradeoff/Co-Benefit Analysis
Theresultsofthe HSDW, the LSMandtheESH performanceintermsofthreeperformance indicatorsarelistedinTable 6.ThecorrespondingbarplotsareshowninFigure 5, whereeach performancemeasurementisnormalizedforcomparisonpurposes.Tobespecific, theresultsin Figure 5 representnormalizedvalues, whichareobtainedbychoosingthelargestvalueofthe certaingroupdatainTable 6 asone, andtheothersinthatgrouparecalculatedinaccordance withtherelativeproportions.Thebaselinecaseis0%penetrationrateofapplication-equipped vehicles.TheperformancemeasureresultsoftheotherscenariosinTable 6 areforapplication-equipped vehicles.
Table6. Numericalresultsof the case studies
Baseline HSDW LSM ESH Penetration rate 0% 20% 80% 20% 80% 20% 80% Avg. conflict number/ veh
0.1673 0.1646 0.287 0.3922 2.8443 0.1455 0.1711
Avg. speed (mph /veh)
60.6 60.5 56.7 65.5 34.8 59 59.0
Avg. fuel consumption (KJ/mile/veh)
4275.3 4300.9 4464.5 4502.1 5917.2 4191.2 4195.2
Table6and Figure 5 illustratesthetradeoffs/co-benefitsoftraveltime, conflictnumberand fuelconsumptionandshow:
15

20% Penetration Rate 80% Penetration Rate
1.2 1.2 1 1
0.8 0.8 0.6 0.6 0.4 0.4 0.2 0.2 0 0
Avg. conflict Avg. travel time Avg. fuel Avg. conflict Avg. travel time Avg. fuel number consumption number consumption
Baseline HSDW LSM ESH Baseline HSDW LSM ESH
(a) (b)
Figure 5. BarplotsofthreeMOEs(normalized) forthethreeselectedapplications
Penetration Rate of20%: Comparedtothebaseline, theHSDWapplicationachievesslightly lowerconflictfrequency, butissubjecttoslightlylowertraveltimeandhigherfuel consumptionduetoincreasedbrakingbehavioraimingtoobtainsafetybenefits. TheLSM applicationprovideslowertraveltimeduetofaster-lanechangebehavior, butisexposedto higherpotentialconflictsandrequireshigherfuelconsumptionduetotheencouragementof moreaggressivedrivingbehaviors(e.g., frequentlanechangesandhigherspeed).Whereasthe ESHapplicationistheoppositecase, lowerfuelconsumptionisachievedasitisan environmentalprotection-orientedapplication.Simultaneously, lowerconflictnumberare achievedasaco-benefitduetothesteadyspeedandsmoothdrivingbehavior.However, comparedtothebaseline, theenvironmentalimpactsandsafetyareimproveddueto harmonizedbutslowertrafficflow, at thecostoflongertraveltime.
PenetrationRate of80%: Asthepenetrationrate ofapplication-equipped vehicles increases, morefrequent braking operation ofthe HSDW application causesnotonlyslowspeeds, high fuelconsumption, butalsohigherconflictfrequencyeventhoughthisapplicationis initially designedtoreduce overalltraffic conflictrisk. Ontheotherhand, all theperformanceofthe LSMdeterioratescomparedtoeitherthebaselineortheESHapplicationduetomajorityof equippedvehiclesweretryingto execute lanechanges, whichleadstomorechaos onthe roadway.However, theESHapplicationperformancetrenddoesnotchangesignificantly, reducingboththefuelconsumptionandconflictnumberatthecostofthedecreaseofaverage speed.
16

Conclusions and Future Work This whitepaperprovidesanin-depthliteraturereview onCAVapplicationsrelatedresearch, analyzing thepotentialtradeoffsandco-benefitsofthreekeyMOEsamongvariousCAV applicationsindetail.Abroadthree-levelclassificationofCAVapplicationshasbeenproposed, i.e., vehicle-centric, infrastructure-centric, andtraveler-centricapplications.Itwasconcluded thatatrendexiststhataportionofthoseCAVapplicationsarebeingdesignedtoimprovemore thanoneMOE(usuallytwo), however, veryfewCAVapplicationsimproveallthethreemajor MOEs(i.e., safety, mobilityandenvironmentalimpacts).BasedonafundamentalMOEs framework, wepropose atuning approachor strategy, where somekeysystem-wide parameters beoptimized, therebyhelping achievepositivesynergisticeffectswiththeultimate goal ofimprovingallthekeyMOEs.
Incombinationwithco-benefitsanalysisofsometypicalCAVapplications, weidentifiedthekey influential parameters onsystemperformance (benefits), suchastrajectoryplanning, increased spacing, capacityincrease, speeds/decelerationsmoothing, regenerativebraking, vehicle’s dynamicsandexogenoussignalphaseandtimingadjustment, etc.Thein-depthinvestigationof theHighSpeedDifferentialWarning, theLaneSpeedMonitoringandtheEco-Speed Harmonization showthatthereexiststradeoffsbetweenthekeyMOEsforasingle-MOE-focusedapplication(e.g., the HSDWapplicationcaseandthe LSMapplicationcase).Onthe otherhand, someCAVapplicationsmayhaveco-benefitsinthesensethattheycanimprovea combinationofsafety, mobilityandenvironmentalsustainabilitybybetterdesigningortuning systemparameters(e.g., theESHapplicationcase).
Moreover, otherthantheapplicationitself, manynetwork-widefactorscouldaffectthe performanceofaspecificapplication.Forinstance, penetrationrateofapplication-equipped vehiclesisoneimportantdimensionthatshouldbetakenintoaccountwhentheperformance ismeasured, especiallywhenthereisgrowingtrendtowardmixedtrafficwithinthenext decade.Otherparametersconsideredasmacroscopicinfluentialfactors onsystem performance includebutnotlimittotrafficdemand, truckpercentageandevencommunication transmissionrange.
17

References [1] L.Andreone, F.VisintainerandG.Wanielik. Vulnerable Road Users Thoroughly
Addressedin Accident Prevention:TheWATCH-OVEREuropeanproject. in Proc.14th WorldCongr.onIntell.Transp.Syst., Beijing, China, 2007, pp.1-8.
[2] J.J.Anaya, P.Merdrignac, O.Shagdar, F.Nashashibi, andJ.E. Naranjo. Vehicleto Pedestrian Communicationsfor Protectionof Vulnerable Road Users. in Proc.25thIEEE Intell.Veh.Symp., Dearborn, USA, 2014, pp.1037-1042.
[3] K.Boriboonsomsin, M.J.Barth, W.Zhu, andA.Wu. Eco-routing Navigation System basedon Multisource Historicaland Real-time Traffic Information. IEEETrans.Intell. Transp.Syst., Vol.13, No.4, pp.1694-1704,Dec. 2012.
[4] C.Bila, F.Sivrikaya, M.A.Khan, andS.Albayrak. Vehiclesofthe Future:A Survey of Researchon Safety Issues. IEEETrans.Intell.Transp.Syst., Vol.PP, Issue 99, pp.1-20, 2016.
[5] J.Barbaresso, G.Cordahi, D.Garcia, C.Hill, A.Jendzejec, andK.Wright. USDOT’s Intelligent Transportation Systems(ITS)ITS Strategic Plan2015-2019. U.S. DOT, Washington, DC, USA, FHWA-JPO-14-145,Dec. 2014.
[6] M.J.Barth, W.Zhu, K.Boriboonsomsin, andL.Ordonez. Finalreport:AnalysisofGPS-based Datafor Light Duty Vehicles. CaliforniaAirResourcesBoard, CA, USA, 04-327UCR, Aug. 2006.
[7] B.ChenandH.H.Cheng. A Review of The Applicationsof Agent Technology in Traffic and Transportation Systems. IEEETrans.Intell.Transp.Syst., Vol.11, No.2, pp.485-497, Jun. 2010.
[8] K. Dhondge, S. Song, B.-Y.Choi, andH.Park. WiFiHonk Smartphone-based Beacon StuffedWIFI Car2x-communication Systemfor Vulnerable Road User Safety. in Proc. 79thIEEEVehicularTechnol.Conf., Seoul, Korea, 2014.
[9] R.Dang, J.Ding, B.Su, Q.Yao, Y.Tian, andK.Li. A Lane Change Warning Systembased onV2V Communication. in Proc.17thIEEE Intell.Transp.Syst., Qingdao, China, 2014, pp. 1923-1928.
[10] K.C.Dey, L.Yan, X.Wang, Y.Wang, H.Shen, M.Chowdhury, L.Yu, C.Qiu, andV. Soundararaj. A Review of Communication, Driver Characteristics, and Controls Aspects of Cooperative Adaptive Cruise Control(CACC). IEEETrans.Intell.Transp.Syst., Vol.17, No.2, pp.491-509,Feb. 2016.
[11] N.M.Enache, S.Mammar, M.Netto, andB.Lusetti. Driver Steering Assistancefor Lane-Departure Avoidancebasedon Hybrid Automataand CompositeLyapunov Function. IEEETrans.Intell.Transp.Syst., Vol.11, No.1, pp.28-39, Mar.2010.
[12] EuropeanCommission. FP7-COOPERATION-EUROPAResearchTransport. http://cordis.europa.eu/fp7/transport/home_en.html.
[13] M.Fullerton, A.Leonhardt, S.Assenmacher, M.Baur, F.Busch, C.Beltrán, JJ.Mínguez, andT.Paadín. Simulation Studyon Improving Traffic Safetyand Traffic Flowinthe Vicinityof A Motorway Accident Through Vehicle-to-vehicle Communication. in Proc.
18

18thIETRoadTransp.Info.AndControlConf. andthe ITSUnitedKingdomMembers’ Conf., London, UK, 2007.
[14] FHWA. SurrogateSafetyAssessmentModel(SSAM). http://www.fhwa.dot.gov/publications/research/safety/08049/.
[15] Futurism. https://futurism.com/images/tokyo-2020-olympics-future/. [16] C. García-Costa, E.Egea-López, andJ.García-Haro. A Stochastic Modelfor Designand
Evaluationof Chain Collision Avoidance Applications. Transp.Res.C, EmergingTechnol., Vol.30, pp.126-142, May2013.
[17] D.Greene, J.Liu, J.Reich, Y.Hirokawa, A.Shinagawa, H.Ito, andT.Mikami. An Efficient Computational Architecturefor A Collision Early-warning Systemfor Vehicles, Pedestrians, and Bicyclists. IEEETrans.Intell.Transp.Syst., Vol.12, No.4, pp.942-953, Dec.2011.
[18] S.Glaser, L.Nouveliere, andB.Lusetti. Speed Limitationbasedon An Advanced Curve Warning System. in Proc.18thIEEEIntell.Veh.Symp., Istanbul, Turkey, 2007, pp.686-691.
[19] T.GuanandC.W.Frey. Predictive Energy Efficiency Optimizationof An Electric Vehicle Using Informationabout Traffic Light Sequencesand Other Vehicles. in Proc.19thIEEE Intell.Transp.Syst., Rio, Brazil, 2016, pp.919-926.
[20] T.GandhiandM.M.Trivedi. Pedestrian Protection Systems:Issues, Survey, and Challenges. IEEETrans.Intell.Transp.Syst., Vol.8, No.3, pp.413-430,2007.
[21] C.Haupt, J.Rohnstock, andS.Wappler.SmartLDW:A Smartphone-based Local Danger Warning System. in Proc.2thIntl.Conf.onConnectedVeh.AndExpo, LasVegas, USA, 2013,pp. 139-144.
[22] Hondaprojectreport:V2XConnectedVehicleEarlyDeploymentApplicationAnalysis. Sep.2016.
[23] Iteris. ConnectedVehicleReferenceImplementationArchitecture. http://www.iteris.com/cvria/html/applications/applications.html.
[24] Q.Jin, G.Wu, K.Boriboonsomsin, andM.J.Barth. Power-based Optimal Longitudinal Controlfor A Connected Eco-driving System. IEEETrans.Intell.Transp.Syst., Vol.17, No. 10,pp. 2900-2910, Oct.2016.
[25] Q.Jin, G.Wu, K.Boriboonsomsin, andM.J.Barth. Improving Traffic Operations Using Real-time Optimal Lane Selectionwith Connected Vehicle Technology. in Proc.25thIEEE Intell.Veh.Symp., Dearborn, USA, 2014, pp.70-75.
[26] Q.Jin, G.Wu, K.Boriboonsomsin, andM.J.Barth. Platoon-based Multi-agent Intersection Managementfor Connected Vehicle. in Proc.16thIEEEIntell.Transp.Syst., Hague, Netherlands, 2013, pp.1462-1467.
[27] K.D.KusanoandH.C.Gabler. Safety Benefitsof Forward Collision Warning, Brake Assist, and Autonomous Braking Systemsin Rear-end Collisions. IEEETrans.Intell. Transp.Syst., Vol.13, No.4, pp.1546-1555,Dec. 2012.
19

[28] A.M.Khan. Intelligent Infrastructure-based Queue-end Warning Systemfor Avoiding Rear Impacts. IETIntell.Transp.Syst., Vol.1, No.2, pp.138-143,Feb. 2007.
[29] W.Kang, G.Xiong, Y.Lv, X.Dong, F.Zhu, andQ.Kong. Traffic Signal Coordinationfor Emergency Vehicles. in Proc.17thIEEEIntell.Transp.Syst., Qingdao, China, 2014, pp. 157-161.
[30] D.Kari, G.Wu, andM.J.Barth. Eco-friendly Freight Signal Priority Using Connected Vehicle Technology: A Multi-agent Systems Approach. in Proc.25thIEEEIntell.Veh. Symp., Dearborn, USA, 2014, pp.1187-1192.
[31] I.KapariasandM.G.H.Bell. Key Performance Indicatorsfor Traffic Managementand Intelligent Transport Systems. ImperialCollege London, London, UK, 218636, Jun. 2011.
[32] J. B. Kenney. DedicatedShort-RangeCommunications(DSRC) StandardsintheUnited States. in Proc.ofthe IEEEJournal, Vol.99, No.7, pp.1162–1182,Jul. 2011.
[33] K.Li, T.Chen, Y.Luo, and J.Wang. IntelligentEnvironment-FriendlyVehicles:Concept andCase Studies. IEEETrans.Intell.Transp.Syst., Vol.13, No.1, pp.318-328, Mar.2012.
[34] N.Lyamin, Q.Deng, andA.Vinel. StudyofthePlatooningFuelEfficiencyunderETSIITS-G5Communications. in Proc.19thIEEEIntell.Transp.Syst., Rio, Brazil, 2016, pp.551-556.
[35] T.Liu, Y.Wang, W.E, D.Tian, G.Yu, andJ.Wang. Vehicle Collision Warning Systemand AlgorithmatIntersectionunder Internet-connected Vehicles Environment. in Proc.12th COTAIntl.Conf.ofTransp.Pro., Beijing, China, 2012, pp.1177-1185.
[36] Y.Li, Y.Zheng, J.Wang, L.Wang, K.Kodaka, andK.Li. Evaluationof Forward Collision Avoidance System Using Driver’s Hazard Perception. in Proc.19thIEEEIntell.Transp. Syst., Rio, Brazil, 2016, pp.2273-2278.
[37] L.A.LisboaCardoso, M.ComesañaMartinez, A.A.NogueirasMeléndez, andJ.L. Afonso.DynamicInductive Power TransferLane Design for E-Bikes. in Proc.19thIEEE Intell.Transp.Syst., Rio, Brazil, 2016, pp. 2307-2312.
[38] W.Li, G.Wu, K.Boriboonsomsin, M.J.Barth, S.Rajab, S.Bai, andY.Zhang.Development andEvaluationofHighSpeedDifferentialWarningApplicationUsingVehicle-to-vehicle Communication.in Proc.96thAnnu.Meet.Transp.Res.Board, Washington, DC, USA, 2017.
[39] H.S.Mahmassani, T.Hu, S.Peeta, andA.Ziliaskopoulos. Developmentand Testingof Dynamic Traffic Assignmentand Simulation ProceduresforATIS/ATMS Applications. U.S. DOT, Virginia, USA, DTFH61-90-R-00074-FG, Jun.1994.
[40] V.Milanés, J.Godoy, J.Villagrá, andJ.Pérez. Automatedon-ramp Merging Systemfor Congested Traffic Situations. IEEETrans.Intell.Transp.Syst., Vol.12, No.2, pp.500-508, Jun. 2011.
[41] M.Miyawaki, Z.Yamashiro, andT.Yoshida. Fast Emergency Preemption Systems(FAST). in Proc.2ndIEEE/IEEJ/JSAIIntl.Conf.onIntell.Transp.Syst., Tokyo, Japan, 1999, pp.993-997.
20

[42] P.T.Martin. Real Time Measuresof Effectiveness. U.S.DOT, Washington, DC, USA, MPC-03-142,Jun. 2003.
[43] R.Murugesh, U.Ramanadhan, N.Vasudevan, A.Devassy, D.Krishnaswamy, andA. Ramachandran. Smartphonebased Driver Assistance Systemfor Coordinated Lane Change. in Proc.4thIntl.Conf.onConnectedVeh.AndExpo, Shenzhen, China, 2015, pp. 385-386.
[44] N. S. NafiandJ.Y.Khan. AVANETbased Intelligent Road Traffic Signalling System. AustralasianTelecom.NetworksandApplications.Conf., Brisbane, Australia, 2012, pp.1-6.
[45] O.Orfila, G.S.Pierre, andM.Messias. An Androidbased Ecodriving Assistance System to Improve Safetyand Efficiency of Internal Combustion Engine Passenger Cars. Transp. Res.C, EmergingTechnol., Vol.58, PartD, pp.772-782,Sep. 2015.
[46] Y.PeiandL.Dai. Studyon Intelligent Lane Merge Control Systemfor Freeway Work Zones. in Proc.10thIEEEIntell.Transp.Syst., Seattle, USA, 2007, pp.586-591.
[47] Paramics. http://www.paramics-online.com/. [48] H.RamezaniandR.F.Benekohal. Optimized Speed Harmonizationwith Connected
Vehicles for Work Zones. in Proc.18thIEEEIntell.Transp.Syst., CanaryIslands, Spain, 2015,pp. 1081-1086.
[49] R.Sun, W.Y.Ochieng, andS.Feng. An Integrated Solutionfor Lane Level Irregular Driving Detectionon Highways. Transp.Res.C, EmergingTechnol., Vol.56, pp.61-79, Jul. 2015.
[50] R. Schubert, K.Schulze, andG.Wanielik. Situation Assessmentfor Automatic Lane-Change Maneuvers. IEEETrans.Intell.Transp.Syst., Vol.11, No.3, pp.607-616,Sep. 2010.
[51] P.Szczurek, B.Xu, O.Wolfson, andJ.Lin. Estimating Relevanceforthe Emergency Electronic Brake Light Application. IEEETrans.Intell.Transp.Syst., Vol.13, No.4, pp. 1638-1656,Dec. 2012.
[52] T.Schendzielorz, P.Mathias, andF.Busch. Infrastructure-based Vehicle Maneuver Estimationat Urban Intersections. in Proc.16thIEEEIntell.Transp.Syst.,Hague, Netherlands, 2013, pp.1442-1447.
[53] E.Semsar-Kazerooni, J.Verhaegh, J.Ploeg, andM.Alirezaei. Cooperative Adaptive Cruise Control:An Artificial Potential Field Approach. in Proc.27thIEEEIntell.Veh. Symp., Gothenburg, Sweden, 2016, pp.361-367.
[54] D.Santos, Z.Kokkinogenis, J.F.deSousa, D.PerrottaandR.J.F.Rossetti. Towardsthe Integrationof Electric Busesin Conventional Bus Fleets. in Proc.19thIEEEIntell.Transp. Syst., Rio, Brazil, 2016, pp.90-95.
[55] S.Tak, S.Woo, andH.Yeo. Studyonthe Frameworkof Hybrid Collision Warning System Using Loop Detectorsand Vehicle Information. Transp.Res.C, EmergingTechnol., Vol. 73,pp. 202-218,Dec. 2016.
21

[56] D.Tian, W.Li, G.Wu, K.Boriboonsomsin, M.J.Barth, S.Rajab, andS.Bai. Evaluatingthe EffectivenessofV2V-based Lane Speed Monitoring Application: A Simulation Study. in Proc.19thIEEEIntell.Transp.Syst., Rio, Brazil, 2016, pp.1592-1597.
[57] TransportationResearchBoard. Highwaycapacitymanual2010. http://onlinepubs.trb.org/onlinepubs/trnews/trnews273HCM2010.pdf.
[58] U.S.DOT.https://www.transportation.gov/smartcity. [59] E.Uhlemann. Connected-vehicles Applications Are Emerging. IEEEVehicularTechnol.
Mag., Vol.11, Issue 1, pp.25-28, Mar.2016. [60] U.S.EnvironmentalProtectionAgency. MotorVehicleEmissionSimulator(MOVES).
http://www.epa.gov/otaq/models/moves/. [61] G.Wu, D.Kari, X.Qi, K.Boriboonsomsin, andM.J.Barth. Developingand Evaluating An
Eco-speed Harmonization Strategyfor Connected Vehicles. in Proc.4thIntl.Conf.on ConnectedVeh.AndExpo, Shenzhen, China, 2015, pp.373-378.
[62] C.Winter.P.Ritzer, andJ.Brembeck. Experimental Investigationof Online Path Planning for Electric Vehicles. in Proc.19thIEEEIntell.Transp.Syst., Rio, Brazil, 2016, pp.1403-1409.
[63] H.Xia, K.BoriboonsomsinandM.J.Barth. Dynamic Eco-driving for Signalized Arterial Corridorsand Its Indirect Network-wide Energy/Emissions Benefits. JournalofIntell. Transp.Syst.:Technol., Planning, andOperations, Vol.17, No.1, pp.31-41,2013.
[64] B.YangandC.Monterola. Efficient Intersection Controlfor Minimally Guided Vehicles: A Self-organisedand Decentralised Approach. Transp.Res.C, EmergingTechnol., Vol.72, pp. 283-305,Nov. 2016.
[65] H.Yang, H.Rakha, andM.V.Ala. Eco-cooperative Adaptive Cruise Controlat Signalized Intersections Considering Queue Effects. IEEETrans.Intell.Transp.Syst., Vol.PP, Issue 99,pp. 1-11,2016.
[66] M.Zargayouna, F.Balbo, andK.Ndiaye. Generic Modelfor Resource Allocationin TransportationApplicationto Urban Parking Management. Transp.Res.C, Emerging Technol., Vol.71, pp.538-554, Oct.2016.
[67] L.Zhang, S.D.Gupta, J.-Q.Li, K.Zhou, andW.-B.Zhang. Path2Go:Context-aware Services for Mobile Real-time Multimodal Traveler Information. in Proc.14thIEEEIntell. Transp.Syst., Washington, DC, USA, 2011, pp.174-179.
22