Embed Size (px)
Citation preview
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
1
Tectonic Plates in Northeast Asia: Tectonic Plates in Northeast Asia: GPS EvidenceGPS Evidence
1 RDAAC/Geophysical Service RAS, Moscow, Russia2 Lamont-Doherty Earth Observatory of Columbia University, USA3 IMGG FEB RAS, Yuzhno-Sakhalinsk, Russia4 KOMSP Geophysical Service RAS, Petropavlovsk, Russia5 MIT, Cambridge, MA, USA6 University of California Berkeley, USA7 Institute of Physics and Technology RAS, St Petersburg, Russia
Contributed:
Nikolai F. Vasilenko3
Vasily Y. Levin4
Robert W. King5
Thomas A. Herring5, Christopher H. Scholz2, Roland Bürgmann6
Dmitry I. FrolovDmitry I. Frolov77
Grigory M. SteblovGrigory M. Steblov11, , Mikhail G. Mikhail G. KoganKogan22
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
2
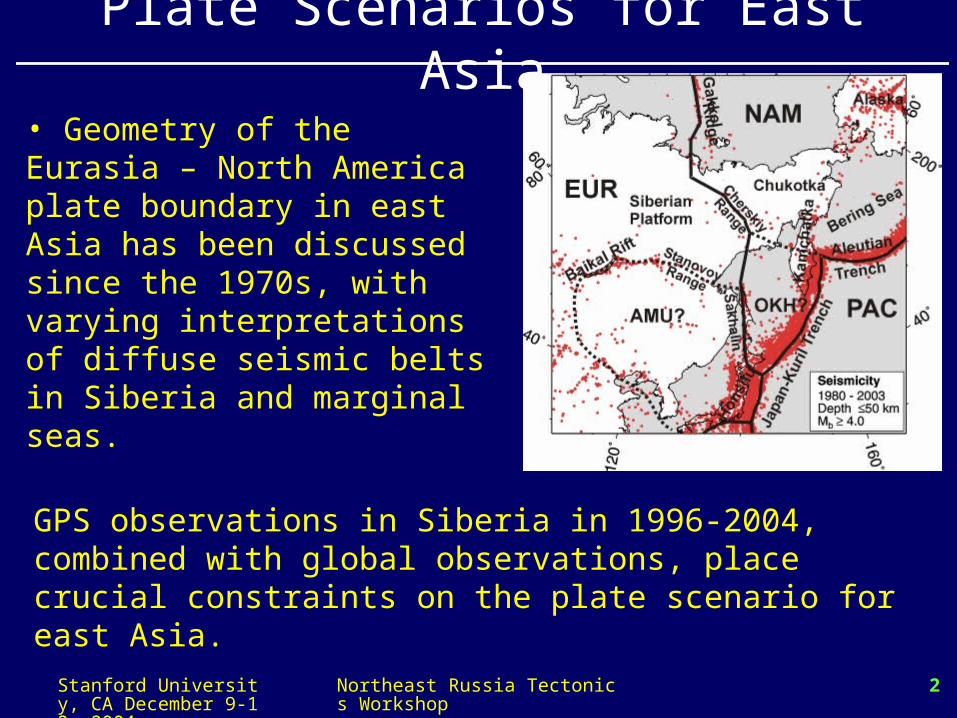
Plate Scenarios for East Asia
• Geometry of the Eurasia – North America plate boundary in east Asia has been discussed since the 1970s, with varying interpretations of diffuse seismic belts in Siberia and marginal seas.
GPS observations in Siberia in 1996-2004, combined with global observations, place crucial constraints on the plate scenario for east Asia.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
3
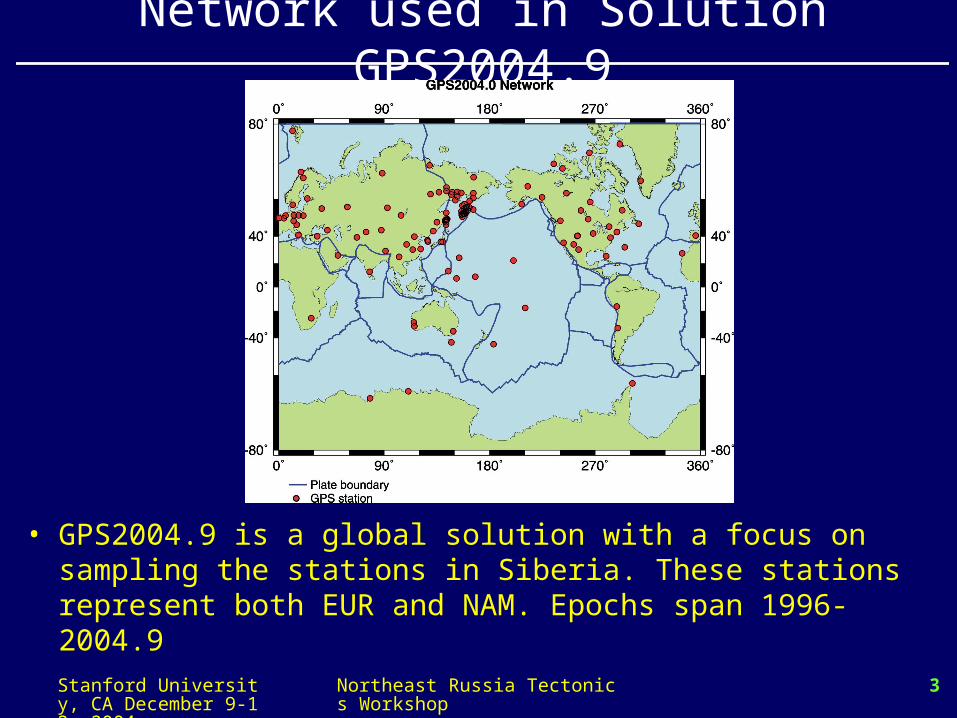
Network used in Solution GPS2004.9
• GPS2004.9 is a global solution with a focus on sampling the stations in Siberia. These stations represent both EUR and NAM. Epochs span 1996-2004.9
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
4
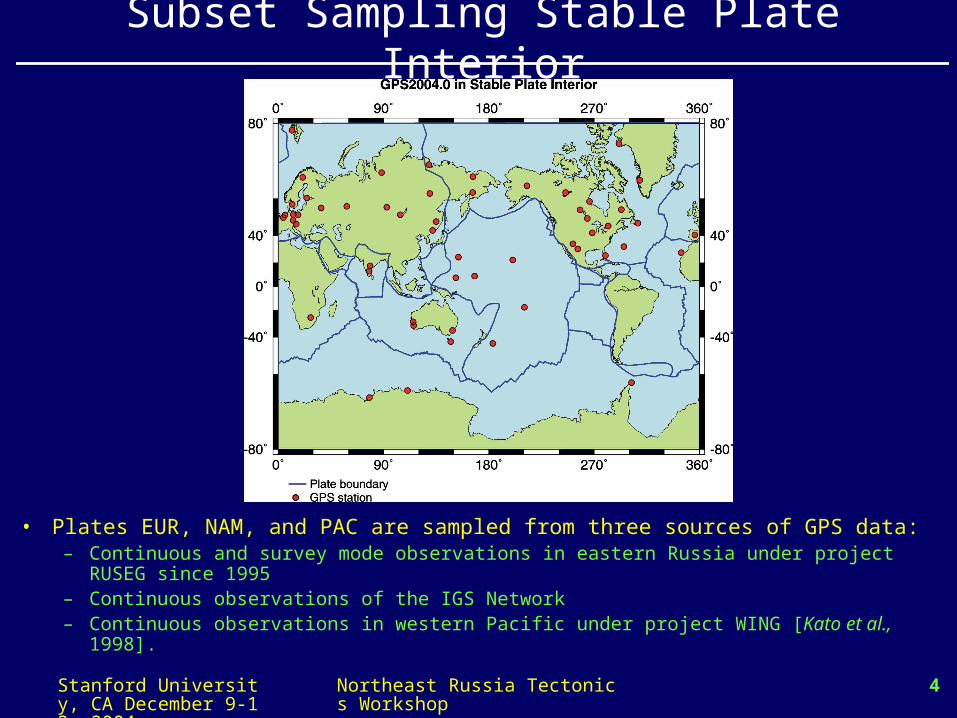
Subset Sampling Stable Plate Interior
• Plates EUR, NAM, and PAC are sampled from three sources of GPS data:– Continuous and survey mode observations in eastern Russia under project RUSEG
since 1995– Continuous observations of the IGS Network– Continuous observations in western Pacific under project WING [Kato et al., 1998].
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
5
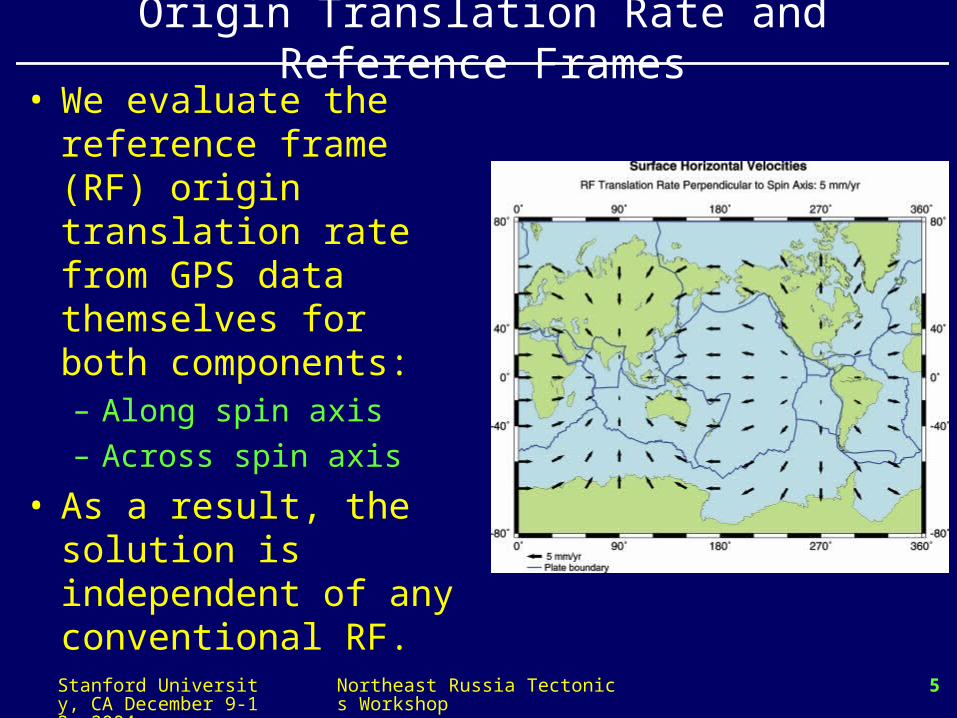
Origin Translation Rate and Reference Frames• We evaluate the
reference frame (RF) origin translation rate from GPS data themselves for both components:– Along spin axis– Across spin axis
• As a result, the solution is independent of any conventional RF.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
6
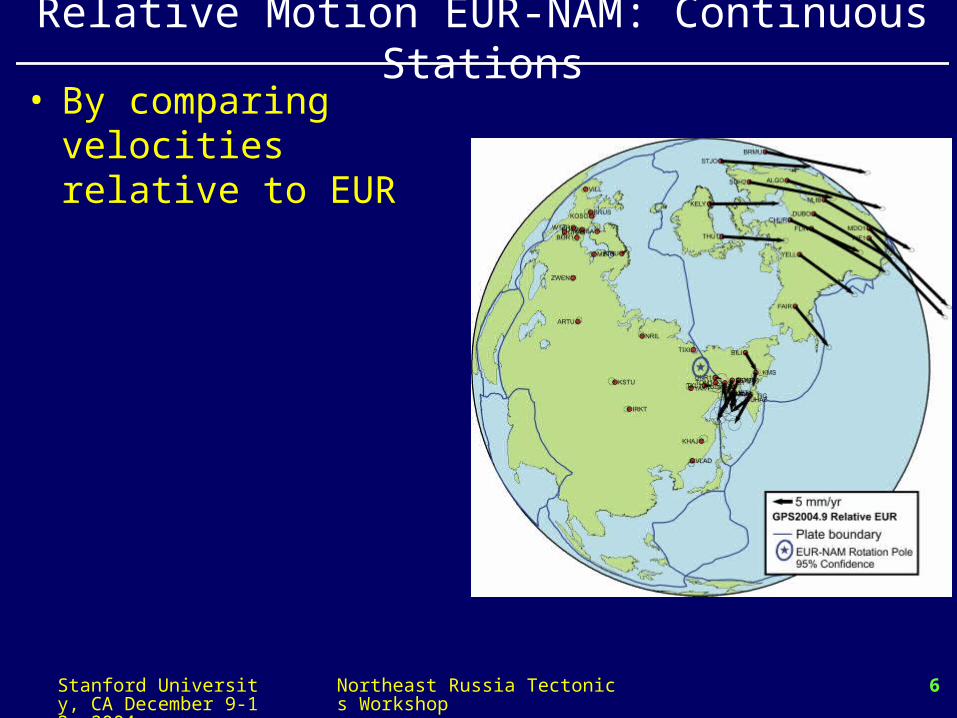
Relative Motion EUR-NAM: Continuous Stations• By comparing velocities
relative to EUR
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
7
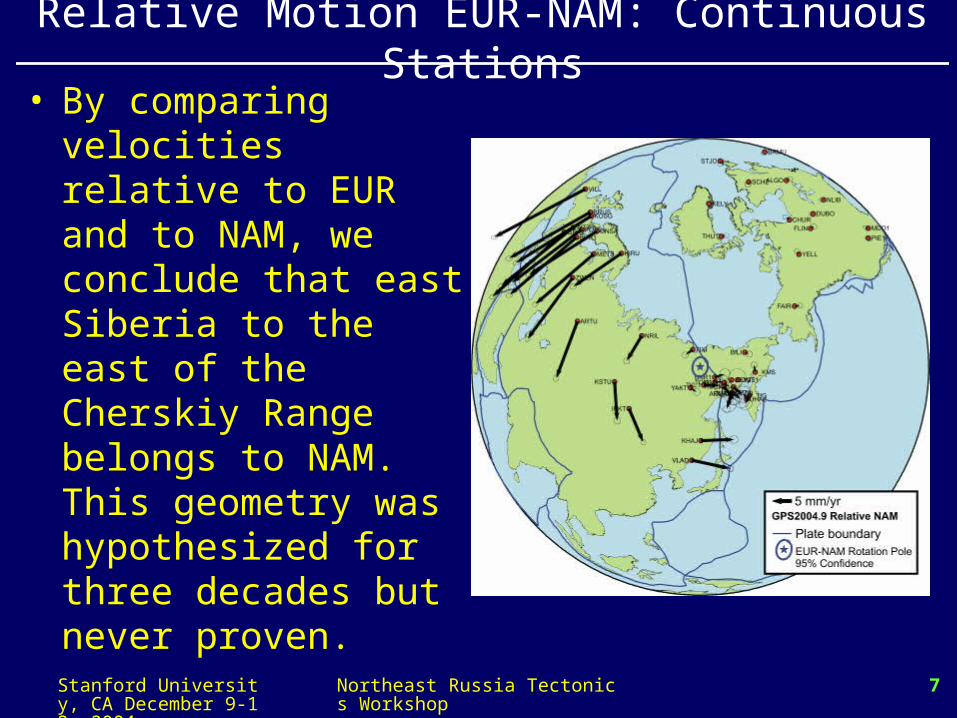
Relative Motion EUR-NAM: Continuous Stations• By comparing velocities
relative to EUR and to NAM, we conclude that east Siberia to the east of the Cherskiy Range belongs to NAM. This geometry was hypothesized for three decades but never proven.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
8
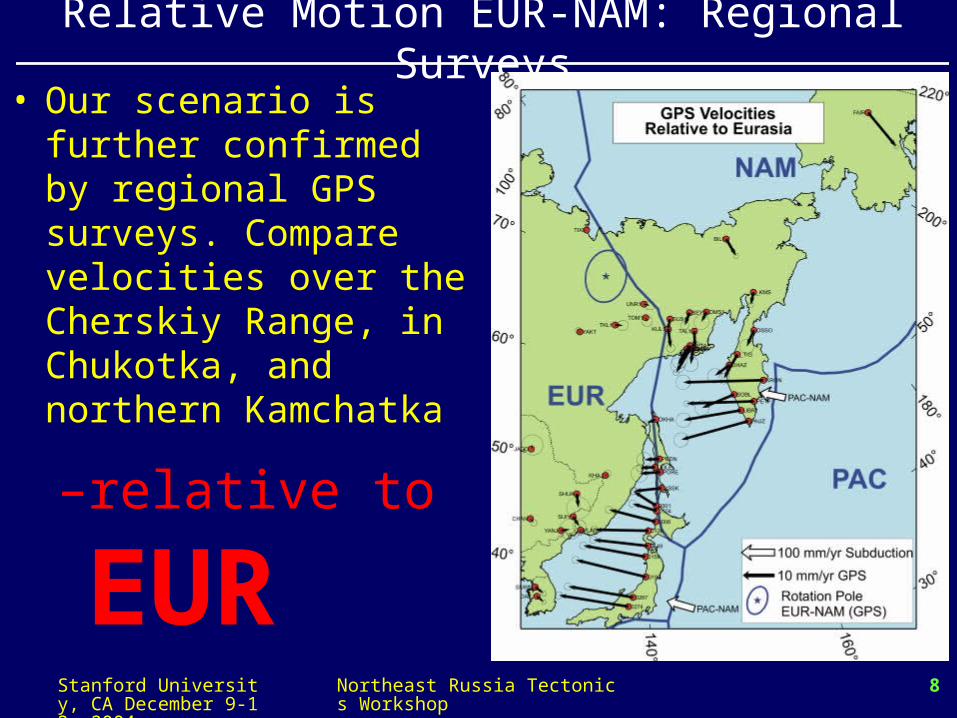
Relative Motion EUR-NAM: Regional Surveys• Our scenario is further
confirmed by regional GPS surveys. Compare velocities over the Cherskiy Range, in Chukotka, and northern Kamchatka
–relative to
EUR
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
9
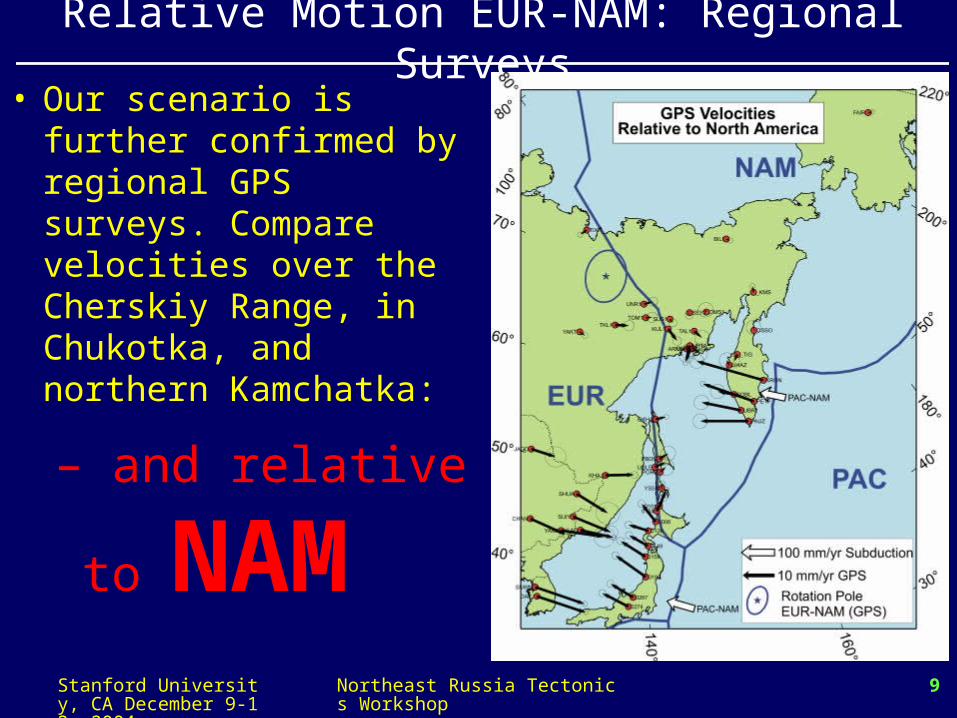
Relative Motion EUR-NAM: Regional Surveys• Our scenario is further
confirmed by regional GPS surveys. Compare velocities over the Cherskiy Range, in Chukotka, and northern Kamchatka:
– and relative to
NAM
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
10
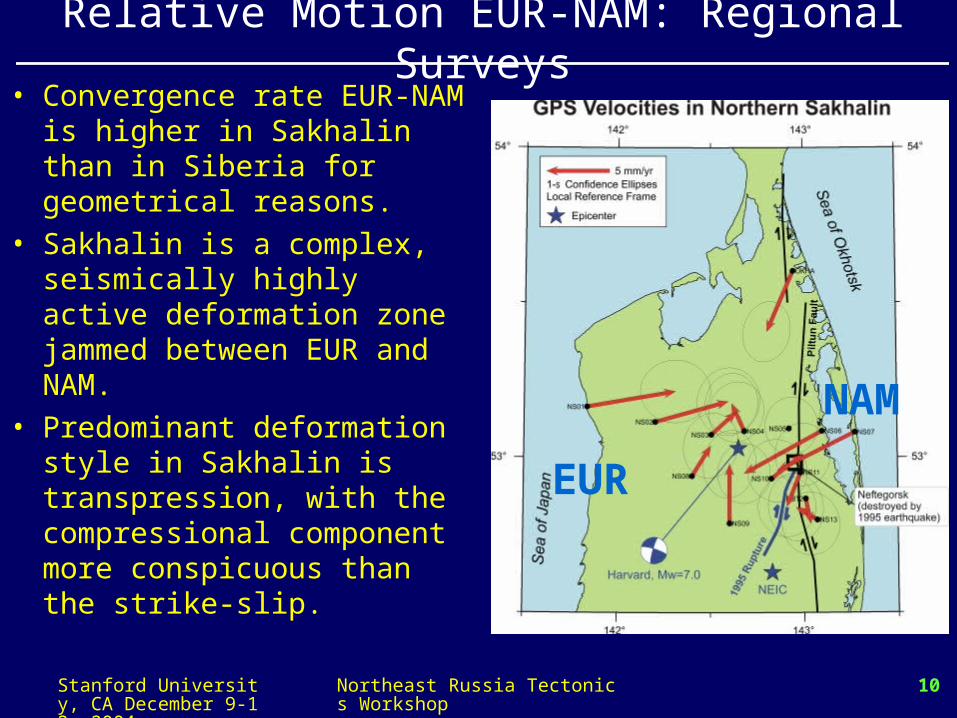
Relative Motion EUR-NAM: Regional Surveys• Convergence rate EUR-NAM
is higher in Sakhalin than in Siberia for geometrical reasons.
• Sakhalin is a complex, seismically highly active deformation zone jammed between EUR and NAM.
• Predominant deformation style in Sakhalin is transpression, with the compressional component more conspicuous than the strike-slip.
EUR
NAM
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
11
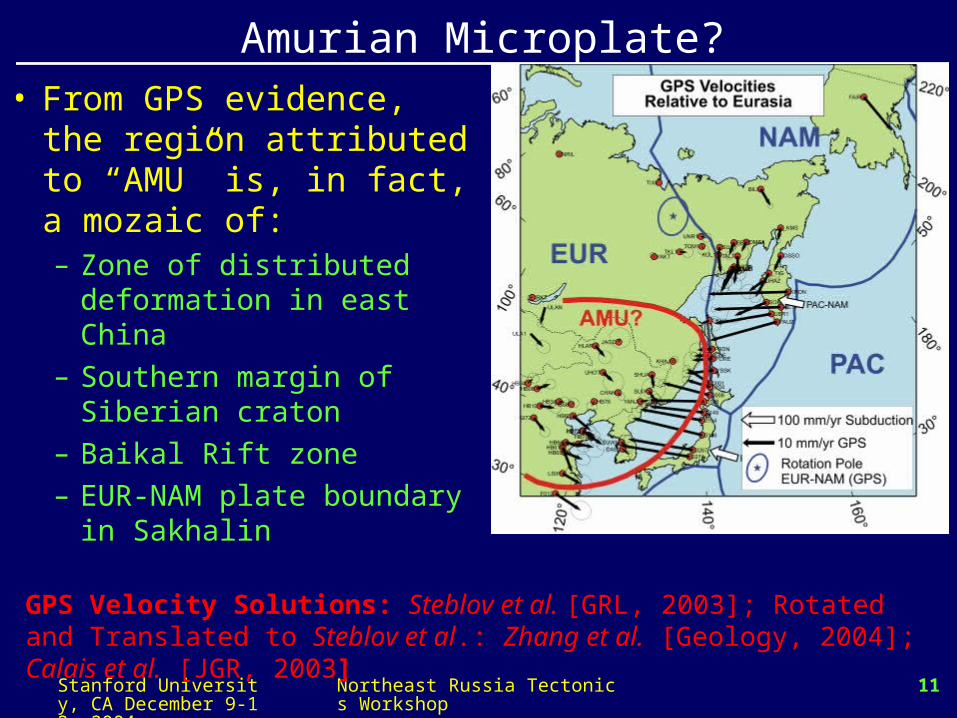
Amurian Microplate?• From GPS evidence, the
region attributed to “AMU” is, in fact, a mozaic of:– Zone of distributed
deformation in east China– Southern margin of
Siberian craton– Baikal Rift zone– EUR-NAM plate boundary
in Sakhalin
GPS Velocity Solutions: Steblov et al. [GRL, 2003]; Rotated and Translated to Steblov et al.: Zhang et al. [Geology, 2004]; Calais et al. [JGR, 2003]
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
12
GPS and Geologic Plate Models
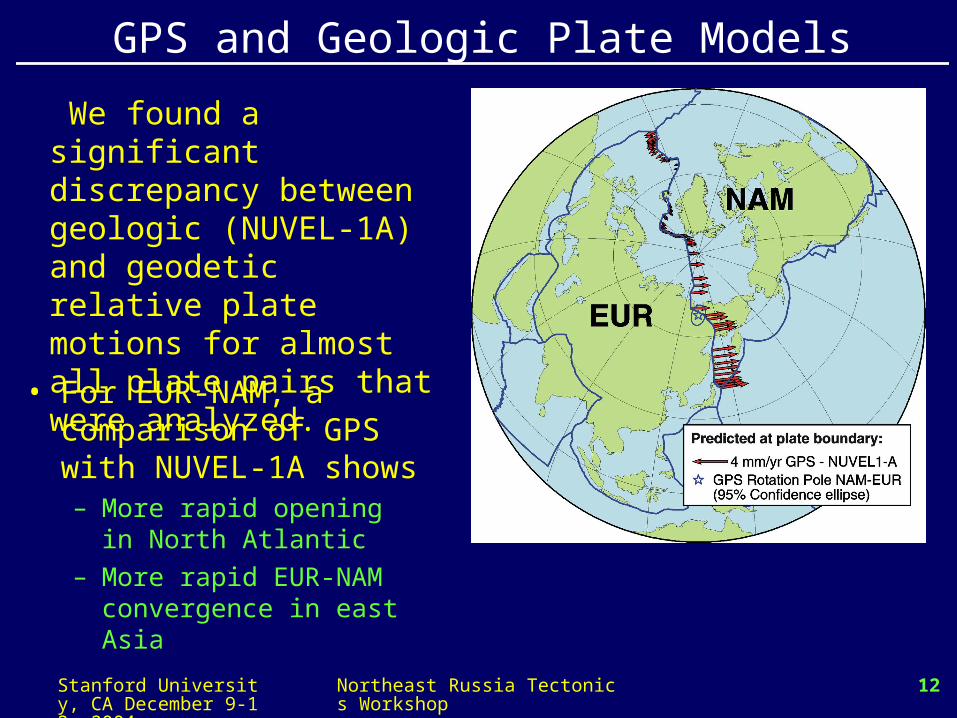
• For EUR-NAM, a comparison of GPS with NUVEL-1A shows– More rapid opening in
North Atlantic– More rapid EUR-NAM
convergence in east Asia
We found a significant discrepancy between geologic (NUVEL-1A) and geodetic relative plate motions for almost all plate pairs that were analyzed.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
13
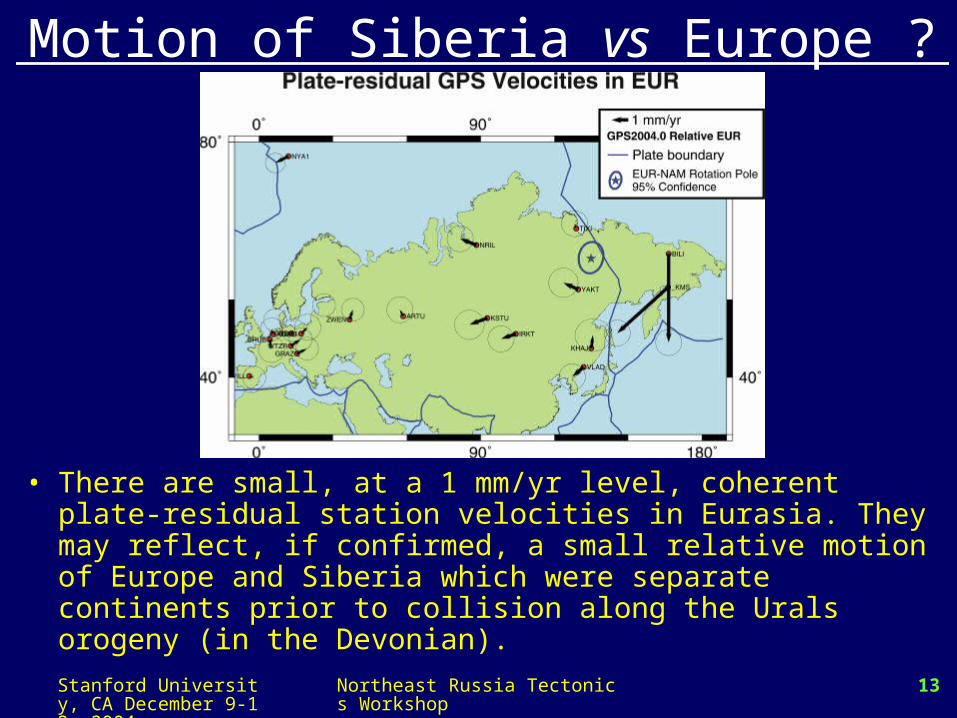
Motion of Siberia vs Europe ?
• There are small, at a 1 mm/yr level, coherent plate-residual station velocities in Eurasia. They may reflect, if confirmed, a small relative motion of Europe and Siberia which were separate continents prior to collision along the Urals orogeny (in the Devonian).
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
14
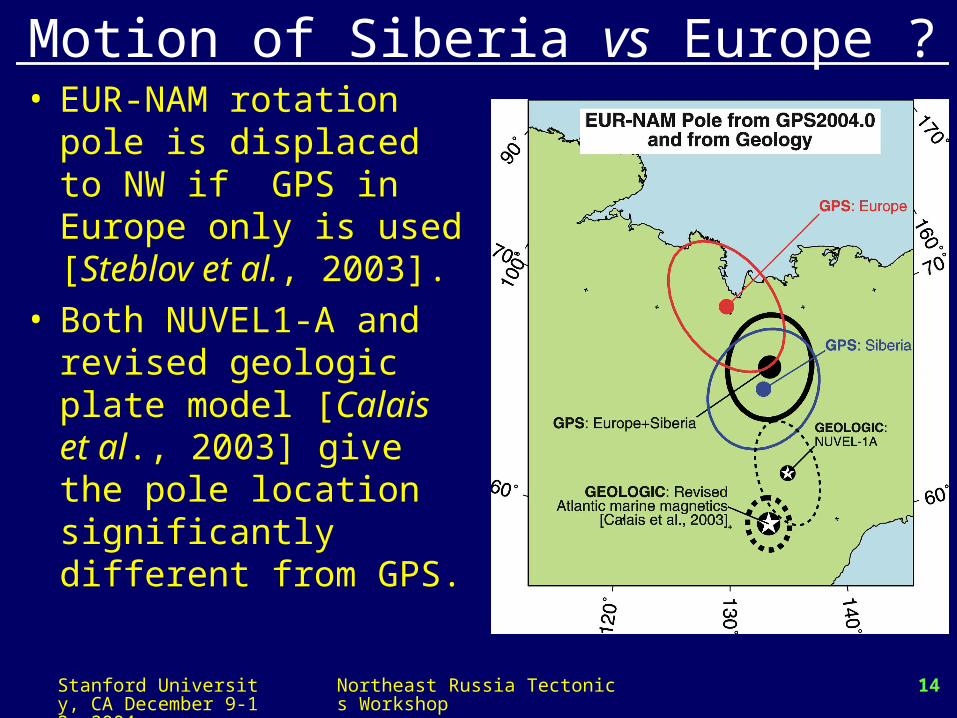
Motion of Siberia vs Europe ?• EUR-NAM rotation pole
is displaced to NW if GPS in Europe only is used [Steblov et al., 2003].
• Both NUVEL1-A and revised geologic plate model [Calais et al., 2003] give the pole location significantly different from GPS.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
15
Conclusions• GPS observations in east Siberia, combined
with global observations collected in 1995-2003, place constraints on the geometry and motion of Eurasian, North American, and Pacific plates in east Asia.
• From GPS evidence, easternmost Siberia to the E of the Cherskiy Range, including Chukotka and Kamchatka, belongs to the North American plate. The data do not invoke the presence of microplates here.
• GPS hints at a slight relative motion of Europe with respect to Siberia <2 mm/yr.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
16
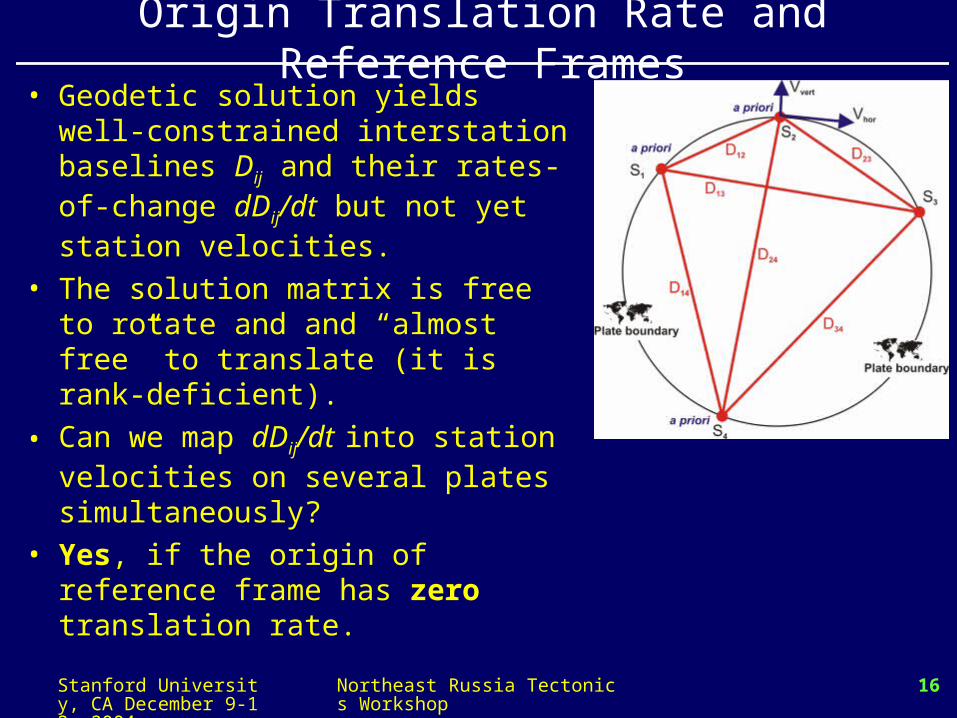
Origin Translation Rate and Reference Frames• Geodetic solution yields well-
constrained interstation baselines Dij and their rates-of-change dDij/dt but not yet station velocities.
• The solution matrix is free to rotate and and “almost free” to translate (it is rank-deficient).
• Can we map dDij/dt into station velocities on several plates simultaneously?
• Yes, if the origin of reference frame has zero translation rate.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
17
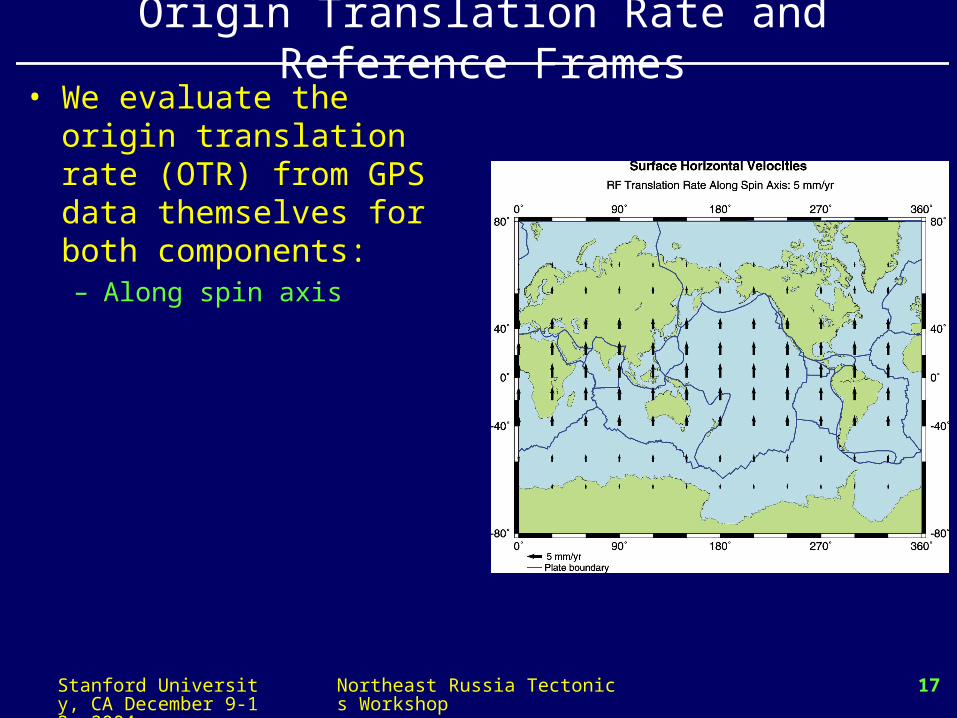
Origin Translation Rate and Reference Frames• We evaluate the origin
translation rate (OTR) from GPS data themselves for both components:– Along spin axis
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
18
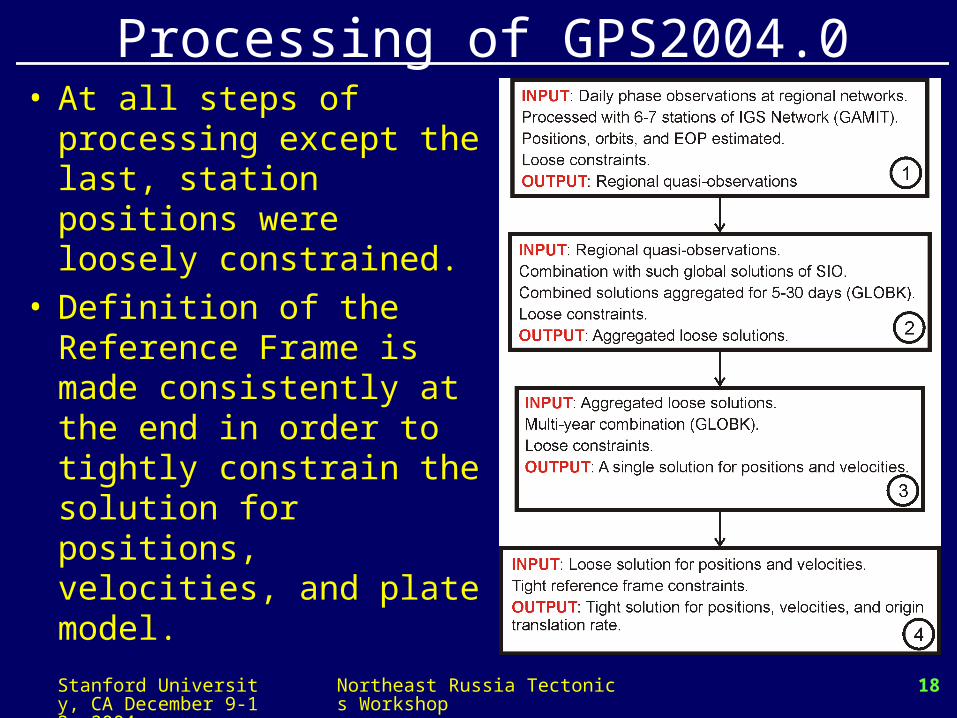
Processing of GPS2004.0• At all steps of processing
except the last, station positions were loosely constrained.
• Definition of the Reference Frame is made consistently at the end in order to tightly constrain the solution for positions, velocities, and plate model.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
19
Origin Translation Rate and Reference Frames
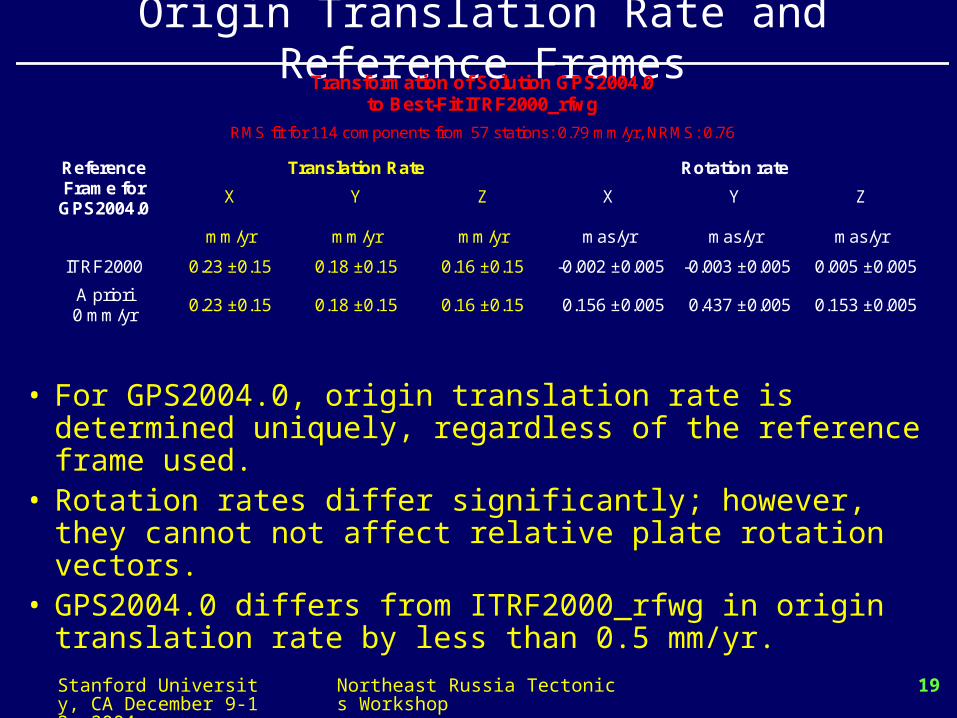
• For GPS2004.0, origin translation rate is determined uniquely, regardless of the reference frame used.
• Rotation rates differ significantly; however, they cannot not affect relative plate rotation vectors.
• GPS2004.0 differs from ITRF2000_rfwg in origin translation rate by less than 0.5 mm/yr.
Transformation of Solution GPS2004.0 to Best-Fit ITRF2000_rfwg
RMS fit for 114 components from 57 stations: 0.79 mm/yr, NRMS: 0.76
Translation Rate Rotation rate Reference Frame for GPS2004.0
X Y Z X Y Z
mm/yr mm/yr mm/yr mas/yr mas/yr mas/yr
ITRF2000 0.23 ±0.15 0.18 ±0.15 0.16 ±0.15 -0.002 ±0.005 -0.003 ±0.005 0.005 ±0.005
A priori 0 mm/yr
0.23 ±0.15 0.18 ±0.15 0.16 ±0.15 0.156 ±0.005 0.437 ±0.005 0.153 ±0.005
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
20
Discrepancy: GPS-Geology
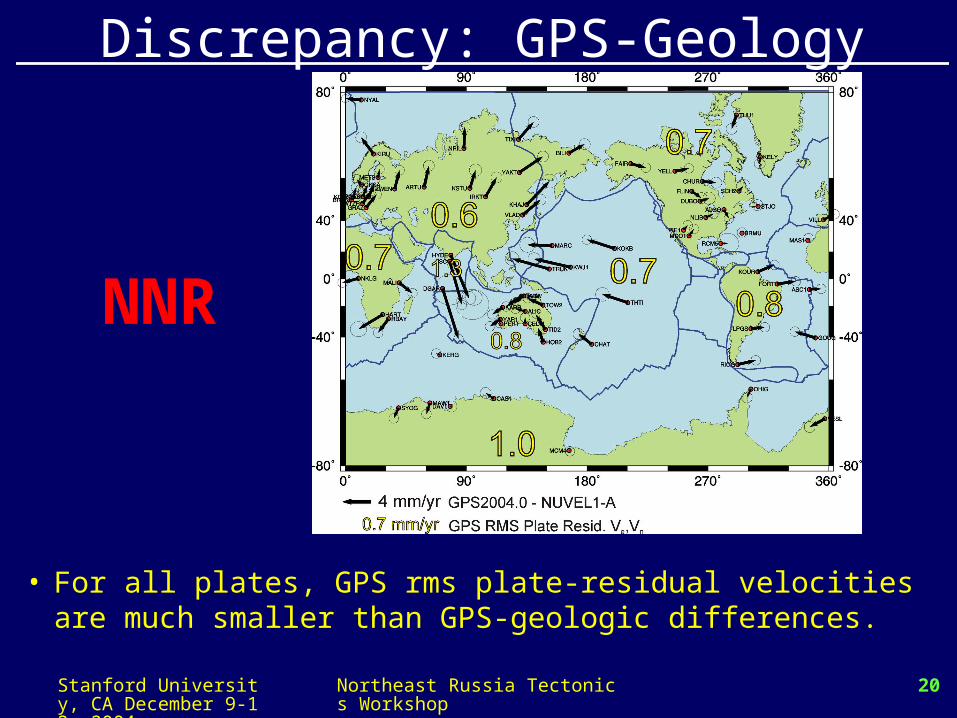
• For all plates, GPS rms plate-residual velocities are much smaller than GPS-geologic differences.
NNR
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
21
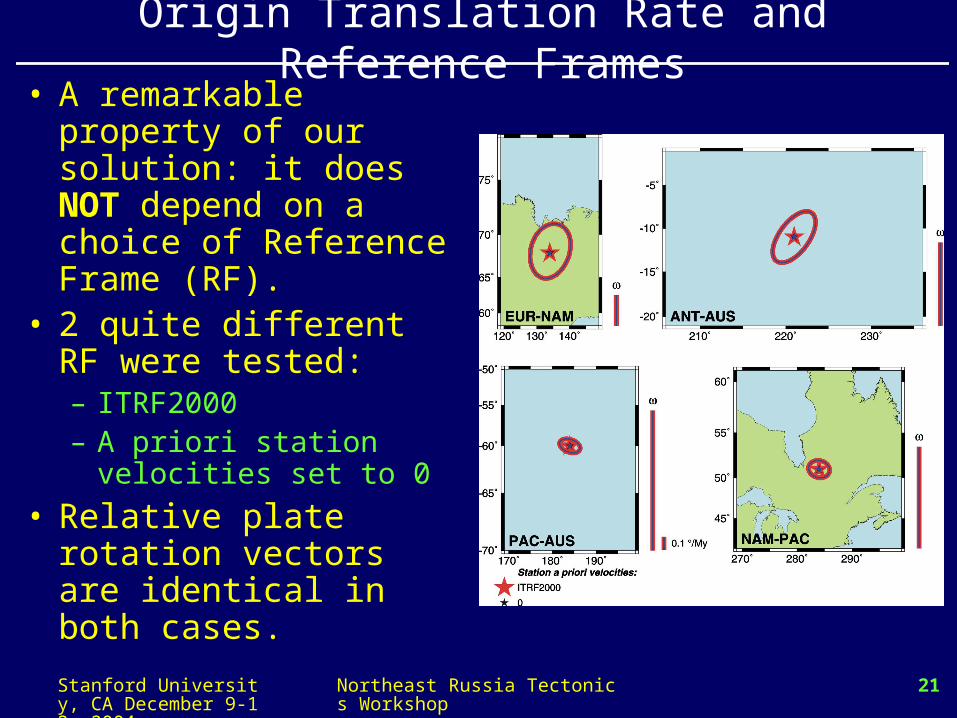
Origin Translation Rate and Reference Frames• A remarkable property
of our solution: it does NOT depend on a choice of Reference Frame (RF).
• 2 quite different RF were tested: – ITRF2000– A priori station velocities
set to 0
• Relative plate rotation vectors are identical in both cases.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
22
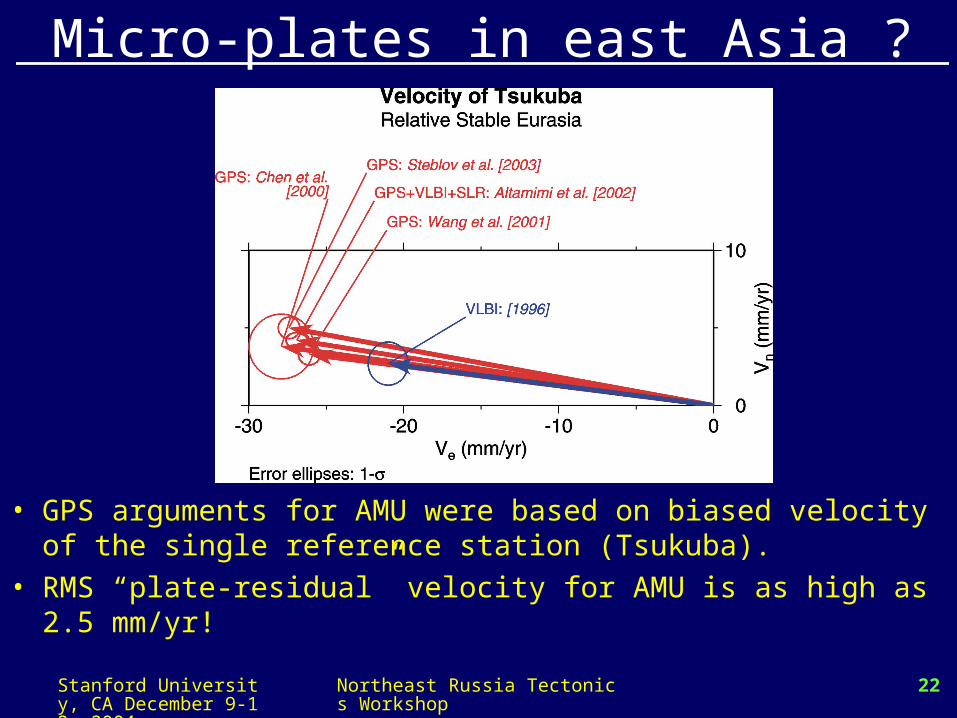
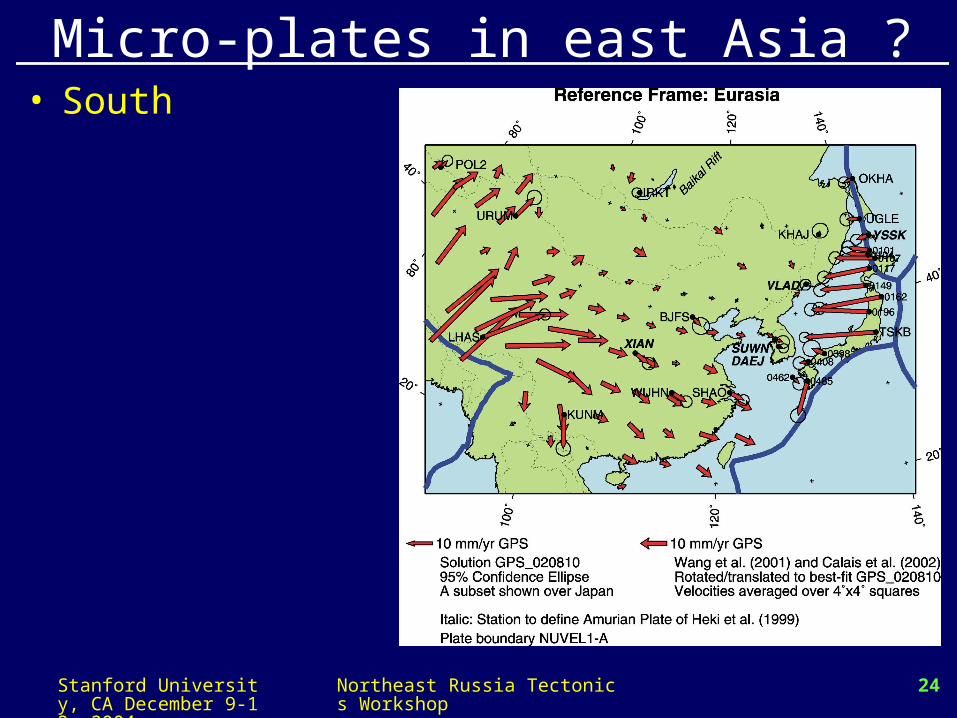
Micro-plates in east Asia ?
• GPS arguments for AMU were based on biased velocity of the single reference station (Tsukuba).
• RMS “plate-residual” velocity for AMU is as high as 2.5 mm/yr!
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
23
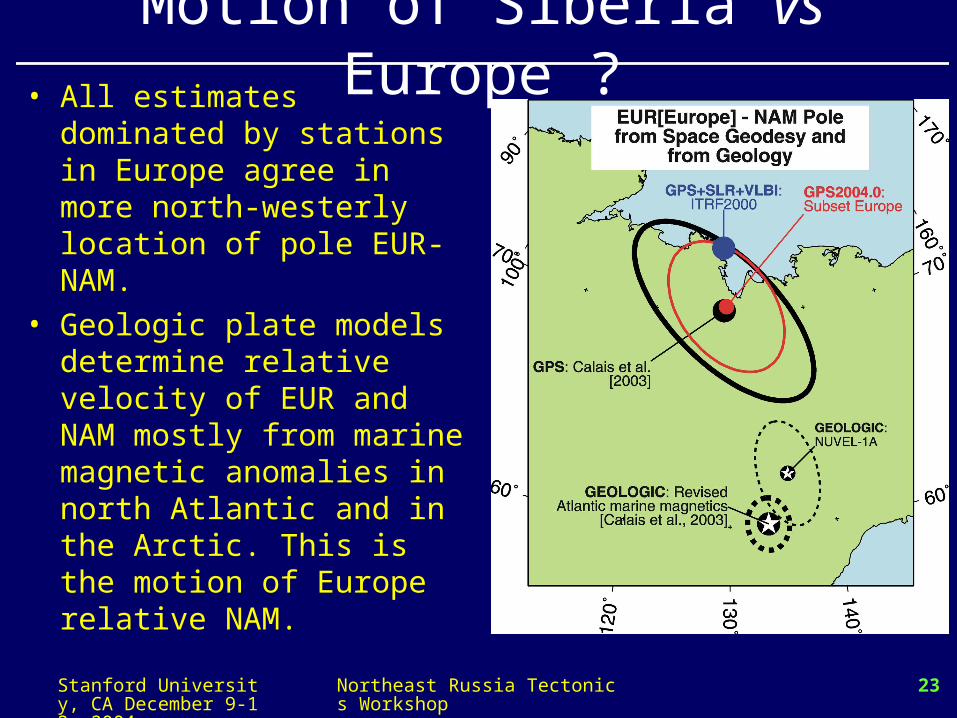
Motion of Siberia vs Europe ?• All estimates dominated by
stations in Europe agree in more north-westerly location of pole EUR-NAM.
• Geologic plate models determine relative velocity of EUR and NAM mostly from marine magnetic anomalies in north Atlantic and in the Arctic. This is the motion of Europe relative NAM.
Stanford University, CA December 9-12, 2004
Northeast Russia Tectonics Workshop
24
Micro-plates in east Asia ?• South