Embed Size (px)
Citation preview

J. exp. Biol. (1976), 65, 577-602With 8 figuret
Printed in Great Britain
SPIRILLUM SWIMMING: THEORY AND OBSERVATIONSOF PROPULSION BY THE FLAGELLAR BUNDLE
BY H. WINET AND S. R. KELLER*
California Institute of Technology,Division of Engineering and Applied Science, Pasadena, California 91125
(Received 4 June 1976)
SUMMARY
The hydrodynamics and energetics of helical swimming by the bacteriumSpirillum sp. is analysed using observations from medium speed cine photo-micrography and theory. The photographic records show that the swimmingorganism's flagellar bundles beat in a helical fashion just as other bacterialflagella do. The data are analysed according to the rotational resistive theoryof Chwang & Wu (1971) in a simple-to-use parametric form with the viscouscoefficients Ce and Cn calculatedaccording to the method of Lighthill (1975).Results of the analysis show that Spirillum dissipates biochemical energy inperforming work against fluid resistance to motion at an average rate of about6 x io"8 dyne cm s- 1 with some 62-72 % of the power dissipation due to thenon-contractile body. These relationships yield a relatively low hydromech-anical efficiency which is reflected in swimming speeds much smaller than arepresentative eukaryote. In addition the CJC8 ratio for the body is shown tolie in the range o-86-i -51 and that for the flagellar bundle in the range 1 -46-1-63. The implications of the power calculations for the Berg & Anderson(1973) rotating shaft model are discussed and it is shown that a rotationalresistive theory analysis predicts a 5-cross bridge M ring for each flagellum ofSpirillum.
INTRODUCTION
All flagellated micro-organisms must divide the biochemical energy they generateinto the performance of biosynthetic, molecular transport and mechanical work. Therelative rates at which this energy is dissipated (the power) in the various work functionsis one measure of the relative survival value of the function in question. Absolute valuesfor power cost can provide the limits within which models for the processes by whicheach of the three kinds of work is carried out must remain. Moreover, since energyrelationships are common denominators for all cell activities, they can be used to tracethe causal connexions between the three work processes.
The procedures described in this report can be used to calculate the power cost to anyflagellated micro-organism of overcoming fluid resistance to propulsion. The presentcase is particularly illustrative because the geometry of the flagellar beat is not readilyapparent, so a variety of possibilities are explored. The fact that the organism is a
• Present address: Department of Civil Engineering and Engineering Mechanics, ColumbiaUniversity, New York, N.Y. 10027.

578 H. WINET AND S. R. KELLER
<",— il = a Lab. frame
Fig. 1. The balancing of angular momentum which extends the resistive theory of Gray &Hancock (1955) to the rotational resistive theory of Chwang & Wu (1971). The flagellumwould rotate at angular velocity o>, if the body were held fast. In the free fluid however, thebody counter rotates - as must the bundle to keep from twisting off - until it attains a steadyangular velocity fl at which the total angular momentum is balanced.
prokaryote imposes no limits on the calculation of dynamic quantities - force, moment,etc. - but the values generated by this analysis are of prime importance to the develop-ment of a model for prokaryote flagellar oscillation.
Calculation of power requirements for mechanical work usually proceed from adetermination of the forces and moments imposed on the system at work by the resistingenvironment. Where force is F and swimming velocity is U the power P is readily cal-culated as a form of F. U in dyne cm s-1. The energy dissipated over a period of time ta form of P . * which is related to work by the first law of thermodynamics.
The organism of interest in the present analysis is the bacterium Spirillum. The fluid-mechanical model by which forces and moments are calculated is the rotational resistivetheory developed by Chwang & Wu (1971). This theory for flagellum-propelledmicro-organisms was developed for three-dimensional flagellar beats from the two-dimensional theory of Gray & Hancock (1955). Chwang, Wu & Winet (1972, hereafterto be designated CWW) have in fact, used measurements of Spirillum locomotionobtained by Metzner (1921) to calculate dynamic quantities for this organism. We shallshow, however, that the flagellar beat geometry interpreted from Metzner's drawings -and consequently the resulting CWW model - are oversimplified. In the CWW model,as in all analyses based upon rotational resistive theory, a tail, flagellum, or, as is thecase with Spirillum, a flagellar bundle tries to 'whip about' at some angular velocitytoit as indicated in Fig. 1. The fluid reacts to 0)J, in balancing the angular momentum,with a viscous resistance which has the effect of counter-rotating the non-flexible bodyand attached bundle at an angular velocity Q. As a result of this balancing an observersitting on the body sees the tail whipping about at (o% but an observer in the fixed labsystem sees an apparent tail rotation velocity of
w( —O = o). (1)
In order to produce forward motion, the body and/or bundle must propagate atravelling wave which can push the fluid continuously, generating a viscous fluidreaction in the direction of the rotation axis which we shall term the x axis. In the case ofSpirillum the rigid body is already helical in shape so it can generate an x fluid forcecomponent in reaction to the rigid wave whose balance propagation velocity is O/&6 = cb
where kb = 277/A6 the wave constant, with A6 the rigid helix wavelength. When the fluidforces generated by cb and the moments of force (or torques) generated by G> and Q, are

Spirillum swimming: theory and observations of propulsion 579
(P)
•2b
> x
u
(c)
Fig. 2. The kinematic parameters associated with the rigid helical Spirillum body (a), theconical beat bundle C (b), the damped helical beat bundle DH (c, first diagram), the rigidhelical beat bundle RH (c, second diagram) and the parabolic beat bundle PB (c, thirddiagram). The directions of wave propagation (cb and cj) and rotation (hi and O) are shownin each case. In all cases save the conical bundle model a. at any instant is formed by animaginary axis (straight broken lines) with the * axis. For the C the angle-forming axis is thebundle material axis.

580 H. WINET AND S. R. KELLER
balanced, the organism moves forward (in the positive * direction) at a constant velocityU. The resulting swimming is called quasi-steady (because oscillations are presentbut relatively small as determined by the oscillatory Reynolds number Rew =fli/vwhich is <̂ 1) and characterizes all motion which conforms to rotational resistive theory.
In the CWW model the function of the flagellar bundle is limited to the productionof 0) as it is taken to transcribe a cone of half-angle a with the x axis. Implicit in thisassumption is a limitation of flexibility in the bundle to a small region near the base. Thealternative to bundle flexibility would be a single rotating shaft which is not conceivablefor the bundle as a unit because each of its individual flagella arise from separate 'holes'in the cell wall (Williams & Chapman, 1961) and it is unlikely that all but one of theentire array of flagella can detach themselves from their moorings and revolve around theflagellum remaining attached. This view of the bundle beat is similar to that of Metzner(1921) with the added simplification of an unbent distal bundle end.
It is the purpose of this report to show that (1) the bundles are bent distally and (2) atleast one of the bundles contributes directly to the balanced force component of theswimming bacterium by propagating a helical (or at least three-dimensional) wave ofvelocity cf = (o/kf (where kf = 27r/A/) and that the aft (posterior) bundle is the morelikely candidate for this beat form.
METHODS AND MATERIALSObservations
Spirillum vohitans was obtained from the American Type Culture collection (cata-logue No. 19553) and a bacterium assumed to be the same species was collected fromLos Angeles hyperion (sewage treatment) plant sludge. The organisms were maintainedwithout aeration at room temperature (21-25 °C) until use, whereupon they wereallowed to cool to 20 °C.
Spirilla to be analysed were suspended in a petroleum jelly-ringed slide preparationand photographed with a Milliken DBM-55 cine camera at speeds of 100-300frames/s. Darkfield illumination was provided by a camera-pulsed xenon-arc lamp.Magnification was provided by a Zeiss WL microscope system fitted with a darkfieldApo 40 x objective. The resulting films were analysed through tracings made on aparallax-corrected Triad film reader. All observations and recordings were made at20 °C. To ensure that organisms photographed were not unevenly influenced by walldrag, the plane of focus was maintained midway between the coverslip and the slide.One cannot assume, of course, that all wall effects were eliminated.
A total of 18 Spirilla were analysed. All motions were referenced to the lab system.Values for cb and cs were determined by direct measurement of wave progression or byfollowing the progress of illuminated spots on the wave which were formed when thecurved structure moved into and out of the darkfield light belt. Time measurementswere facilitated by a timing light in the camera which marked the film at 120 Hz. Valuesfor Q and w were determined by three complementary methods. First from rotationfrequency measurements obtained from the films where, Q = 2nfb and w = 2irff (withfb and// the body and flagellar bundle frequencies respectively). Second, from cb andCf, utilizing the definitions given above. Third, the general range for Cl was verified bydirect observation of swimming Spirilla wherein the regular xenon-arc was replaced by

Spirillum swimming: theory and observations of propulsion 581
a Strobotac (General Radio) and the flash rate was decreased slowly from 600 Hz to thevalues at which the body appeared as two standing wave images 1800 out of phase, andthen one standing wave image. The value of Q. obtained in this manner was then com-compared with measurements from the first two methods. If the range of values agreed,the original measurements were considered verified.
Diagrams showing the parameters measured for each model are presented in Fig. 2.All symbols with 'b' subscripts refer to the rigid body and all symbols with'/' subscriptsto the flagellar bundles regardless of their geometry. The measurements indicated inFig. 2 (a) are straightforward and easy to obtain. The quantity /?6 which is the helicalpitch angle is readily calculated from tan /?6 = kb hb.
The most difficult measurement to evaluate is a, the average angle formed by thebundle with the progression or x axis. The reasons for this difficulty are clear from Fig.2 (b). As the body helix rotates it carries the axis of the bundle beat around and it isunlikely that this axis is a linear extension of the body material axis (the long dash line infigure) because during the forward motion of the organism the bundles are bent aftwardby viscous drag; however, calculations are greatly simplified if we ignore this difference.Couple this condition with the fact that w is always greater than Q. and it becomes clearthat any representative value for a must be an average. In addition, the a observedthrough the microscope is a projection of the true three-dimensional angle onto theplane of view, so the only hope for obtaining a true value for any instantaneous a islimited to the instant when the tip of the body helix and the tip of the bundle emergingfrom it move into the plane of view simultaneously. Accordingly, a is represented by arange of values which is approximated from the maximum and minimum measuredvalues and for calculations we make the further simplification that the flagellar bundleaxis coincides with the body material axis as in Fig. 1.
Fig. 2(c) summarizes the bundle beat models to be matched against the conical beatmodel of 2 (A). At the left the damped helix DH, at the centre the rigid helix RH and atthe right the parabola PB. In all applications of the models the values of hf and Xf
chosen as constants were single values obtained from one organism swimming at anaverage velocity (note that tan fif = hfkf). For the parabolic beat an estimate of the focusy was obtained from y = o-2$hf(li — h})~i where ht and / = 7 /im, the approximatebundle length (Metzner, 1921), form two sides of a right triangle as illustrated in thethird diagram of Fig. 2(c).
Representation of the motion - kinematics
Three bundle motion geometries were examined vis-d-vis the conical beat form. Inthe simplest the bundle was allowed to possess sufficient flexibility to be bent into aparabola by the viscous drag on the swimming organism. The other two geometrieswere both helical; one replacing the stiff portion of the unbent bundle with a rigidhelical bundle and the other replacing the stiff portion with a flexible helix which isassumed to have passive flexibility. Accordingly, the flexible helix would have to expressthe damping effects of viscous drag. Note that since resistive theory assumes quasi-steady motion there is no allowance for time-dependent variations in either wave propa-gation or rotation about the material axis of a flagellar bundle. Accordingly, the fluid doesnot 'recognize' a bundle's 'elastic' events beyond their expression in the form of thebundle wave. The form of the wave, in turn, becomes the only basis by which bundle

$8z H. WDSTET AND S. R. KELLER
elasticity may be measured (it is a parameter of the damping factory which is discussedbelow). The significance of the quasi-steady assumption is evident in the small differ-ences between the damped and flexible helix bundle models to be presented below (suchdifferences become large only when£ <̂ iorg$> i, conditions which are not exploredbecause they are not supported by observation).
The geometry of a parabolic bundle may be stated in Cartesian notation asz*+y2 = 47*. If we take q = — * as a parameter along the x axis, then we obtain forthe body reference system
x = -q, y = 2(yq)l&in<j>, z = 2(79)*cos0, 0 < q ^ I, (2)
where <j> = tot (t is time). Since the organism is swimming at a velocity U along the xaxis, any given element of the bundle will be found at any instant after t = o to be atUt — q in the lab reference system and the parametric vector form for the motion geo-metry will be
rp = (Ut - q) i + 2(yq)i sin #j + 2(7?)* cos 0 k. (3)
By a similar argument we have for the rigid circular helix wave
rr = (Ut-p)i+hf&in6j + hfco8 0k, o ^p < nfXr, (4)
with/) = x the parameter in the body reference frame and 6 = kjp + tot. For the dampedbundle the waves were taken to be damped in they and z directions with the dampingcoefficient e~ap. Here g is the damping factor with g > o and p is taken to be the sameparameter as before. If we make the further simplifying assumption that kj remainsconstant then (4) becomes
rd = ([/*-/>) i+ 6"^,s in tfj + e-ttfycos0k, (o ^ p < nfAf, g > 0) (5)
for the damped helical bundle.The rigid helical body will conform to the same geometry as the rigid bundle so its
parametric vector form will be
r6 = (Ut + w) i + hb&in@j + hb cos ®k, o < t o ^ n 6 A 6 (6)
with to, * the parameter in the body reference frame and 0 = kb w ~ Q.t, where Q. isnegative because the body must rotate in a sense opposite that of the bundles, (note cb
must remain in the same sense as cf, so we have cbkb= — D).
Forces generated by the motion - dynamics
The forces generated by the given swimming geometries are obtained directly aftersubstitution of equations (3-6) into appendix equation (A7).
dFb = [U(C,-Cn Ab) + cbCyb]Abidw. (7)
dFp= Um[C'a(yq)lB-i-C^yq)-iB]cosadq. (8)dFT= -m[U(C'nAf-C'8) + cfC'a^]Aricosadp. (9)
dFd = - m[U{C'n D-C's) + cf C's x*f e~^] D~i cos a dp (10)where m is the number of bundles Ab = 1 +Kb, Af = 1 + ^ , B = (yq+ i)t, and D =(i + aie-2ap) with a1 = h}(g* + tff);* and it is understood that only the ^-componentof each force is utilized (the cos a terms project the off-axis bundle beat onto the * axis).
• Dummy variables are used for all differential equations and should be thought of as being auto-matically replaced by the limits of (11-13) after integration (i.e. to becomes nb Atl q becomes / andpbecomes nf Af)

Spirillum swimming: theory and observations of propulsion 583
Table 1. Geometric quantities of swimming Spirillum
(All variances are sample standard deviations. The quantities bf and bf upon which theviscous force coefficients are based were obtained from (i) (Strength & Krieg, 1971). Allsymbols are denned in the text.)
Quantity
Ajhb
cnc.cmb,"/Xfh,C.DH
PBRHC(CWW)
C.DHPBRHC(CWW)
CL
Average value—
2-i5±o-6(i3-2±2-o)x 10"* cm(1-51 ±0-48) x 10-4 cmo-no9±o-oi7o0-1024 ±0-0266
——
i n6-5 x io~* cmI-47X io"4 cm
—o-oo8i
—0-0784
—0-0042
—0-0569
—
Value range
(0-7 — 0-85) x 1&-1 cm (1)1-16 — 3-20(8-5-i7-3)xio-*cm(0-78 — 2-50) x io~* cm0-0619 —01430 (1)0-0411—0-1658(6-2-9-1) x i o - w
(0-13 —0-15) x io~* cm (1)———
0-0440 — 0-0651—
0-0440-0-0651—
0-0350 — 0-0547—
0-0350 — 00547—
(2-1—2-8) X 1O~"II-4-53O
The balanced force equations are formed by adding (7) to each of (8-10) and setting allthree integrated force sums equal to zero:
'I andnt A>= O, ( I I )
rJopJo
(12)
(13)
If both a fore and an aft bundle are present the bundle forces are multiplied by two(m = 2). If, however, the fore and aft bundle geometries differ, as in the case of a para-bolic fore bundle and a damped helical aft bundle, then the total force on the organismis the sum of three forces
j[dFb + dFp + dFd] = o. (14)
Similarly, the torques or moments of force about the * axis on each of the four struc-tures are obtained directly after substitution of equations (3-6) into appendix equation(A 10). The momentum statement can be simplified by noting that Cg and C's > Cm
and C ,̂ for Spirillum as indicated in Table 1. Accordingly, we drop the Cm and C'mterms and obtain
dMb i=-hb [Clhb (CnAb -C,4)+ UCsKb] Abi dm. (15)
dMp i = 4<uCn My<$ Bcosadqi. (16)dMri = mh^wh^CnAf-C'^K^+UCgK^Aficosadpi (17)
dMdi = mhf[(ohj(C^D-C'ai$er*i*)+ UC',Kf)D-ie-*™cosadpi. (18)38 EXB 65

Mod
el
PB (
para
bola
)
RH
(ri
gid
helix
)
DH
(da
mpe
d he
lix)
DH
PB
(fo
re p
arab
ola
- af
t da
mpe
d he
lix)
Mod
el
PB (
para
bola
)
RH
(ri
gid
helix
)
DH
(da
mpe
d he
lix)
DH
PB
(for
e pa
rabo
la-
aft
dam
ped
helix
)
UP
y-B
tTab
le 2
. M
odel
vel
ocit
y ra
tios
Rat
io
Wher
e
/Bt
= (
CB
-(
R
B, =
^A
^C
n-C
J-C
,,^)^
,-*
i>i
=
P,
=
C/
1
CR
t = (
Ci-
CO
mfi
/A/^
^^
ico
sa
Eqn
. no
.
(23)
UD
t-B
t
D,
=
D,
= (
i+a«
)»-D
»
USe
e ab
ove
Tab
le 3
. Mod
el s
pin
rati
os
\p,
=
i?, =
Wh
ere co
» a
(25)
, -
B,
See
abov
e
cos
a
Eqn
. no.
(27)
(28)
(29)
(30)

Journal of Experimental Biology, Vol. 65, No. 3
B C . t9 .2'£! •»
WINET AND S. R. KELLER {Facing p. 584)

Journal of Experimental Biology, Vol. 65, No. 3 Fig- \
Fig. 4. Three-dimensional wave propagation along an aft flagellar bundle of a swimmingSpirillum. The three-dimensional character of the wave is detectable from the in-light andout-of-light or in-focus and out-of-focus alternations along the bundle (see especiallya, d and e). Images are 1/123 8 apart.
H. WINET AND S. R. KELLER

Spirillum swimming: theory and observations of propulsion 585
The balanced torque equations are formed by adding (15) to each of (16-18) and inte-grating over the entire organism to obtain the net zero statements:
"iandnjAj
= O. (19)
Jo(20)
(21)
Continuing the same pattern used for the balanced force equations, we double thebundle torque terms if the organism has bipolar bundles and if the bundle geometriesmatch those of (14) we have
(22)
Testing of the models - velocity and spin ratios
In measuring the degree to which each model fits observations one can often takeadvantage of the linearity of (11-14) and (19-22) to separate the velocity from the geo-metric terms. The ideal resulting statements are of the form Ujc (velocity ratio) andQ/w (spin ratio). Where cb the body wave propagation velocity and c} the bundle wavepropagation velocity are both present, separation is less than ideal but by solving for U,substituting the answer in the balanced torque equation and utilizing the definitions of£2 the body angular velocity and w the bundle angular velocity, the spin terms can stillbe retained in the form D/w (the U and c term is, in any case, called a 'velocity ratio').Accordingly, the velocity and spin ratios for each of the models are presented in Tables2 and 3.
RESULTS
The traditional notion of the Spirillum swimming form is illustrated in the cine filmsequence of Fig. 3. The swept-back appearance of both bundles conforms more to theparabolic arcs in Metzner's (1921) drawings than to the straight rod of the CWW model(which, as we shall see, is nevertheless a reasonable approximation). Such observedgeometry is consistent with the expected curvature for a real attached fibre being bentback under a uniform stress.
One can appreciate the acceptability of Metzner's interpretation when the availabledata consistently confirm his observations. If, however, one makes a long exposureprint of a film sequence showing the aft end of the swimming bacterium he obtains abundle image as shown in Fig. 4 which is not unlike the three-dimensional bundlewavereported for compressed Spirillum by Jarosch (1972, his plate 14). Unfortunately, asimilar print cannot be obtained for the fore end because the body reflects enough lightto obscure the fore bundle. Notwithstanding this lack of data about the fore bundle, it isreasonable to assume that a beating flexible fore bundle has a geometry in the helix-to-parabola range. Tracings of the bundles carried by the specimen of Fig. 4 are presentedin Fig. 5 and appear to bear this assumption out although the fore bundle is alwaysincompletely represented. In any case, limitation of fore bundle geometry to a helixor a parabola and the aft bundle to a helix is reasonable given the data presented.
38-2

586 H. WINET AND S. R. KELLER
Aft
4041
Fig. 5. Tracings from the bundle beat cycle of specimen shown in Fig. 4. The numbers shownindicate a frame number from the motion picture film and contiguous numbers are 1/123seconds apart. The method for determining a from tracings like this is explained in thetext. The off-translation axis characteristic of the bundle geometric axis is evident in thistracing. The dashed lines of the upper diagram - the aft bundle - are helical axes and thoseof the lower diagram - the fore bundle - are radii of curvature.
The models to be tested quantitatively against the CWW model are, then, thebody with (1) one or two flexible (i.e. damped) helical bundles, or one flexible and/or one parabolic bundle (DHPB with appropriate choices for m), (2) one or tworigid helical bundles (RH) and - for completeness - (3) one or two parabolic bundles(PB).
The adaptability of rotational resistive theory is well illustrated in the DHPB model.Since the dynamic relationships for all models are composed of linear operators, onecan superpose any two of them to get a combination model. Then one can test threemodels (e.g. a DH, a PB and a DHPB bundle) from the combination model by adjusting
Ta
ble
4.
Geo
met
ric
para
met
ers
used
to
gen
erat
e m
axim
a a
nd
min
ima
curv
es fo
r th
e v
ari
ou
s b
un
dle
bea
t m
odel
s
Th
e fu
nctio
ns v
and
1 a
re t
he
velo
city
and
spi
n ra
tios
resp
ectiv
ely.
Th
e fo
cus
7 a
nd t
he b
ody
wav
elen
gth
A6 a
re g
iven
in
cm. A
ll s
ymbo
ls a
re d
efin
ed i
n th
e te
xt.)
C(C
WW
) D
H
PB
D
HP
B
RH
Par
amet
er
m Kf
Fun
ctio
n M
in.
Max
.
Mod
el s
peci
fic
V I V s V s V J V t v 1
0-59
7O
-S97
I-IO
OI-
IOO
5-6
xio
-1
a-8
x 10
-*
0597
0597
30
00
2-O
OO
85
x 1
0-
85
x1
0-
Min
.
2 2 i-ooo
I 0
00
05
97
OS9
73-
000
3-00
0
2-8
x 1
0-
2-5
x i
o~
I-O i-o
Max
.
I 2 o-oo
o
I-2O
O
0-98
0
0-59
7
i-oo
o2-
OO
O
8-5
x 1
0-
85
x 1
0-
i-o
i-o
Min
.M
ax.
0-98
0O
-597
i-oo
o3-
000
8-5
x1
0-
56
x1
0-
O-S
970
98
0
3-0
00
2-0
00
85
x io
"2-
8 x
io"
5-0
x io
-*, i
-6x
io-1
60
x io
-',
I-6X
IO-*
Min
.
i-oo
oi-
ooo
0080
0-59
71-
000
3-00
0
85 5-6
x io
Max
.
o-6o
oI-
2OO
0-59
70-
980
2'0
00
2-O
O0
8-s
x 10
-4
2-8
X I
O-*
Min
.
2 2 i-oo
o1-
500
O-5
970-
980
3-0
00
2-O
OO
2-8
x 10
-2-
8 x
io"
Max
.
I r tfq
o-6o
o1-
200
0-98
0
O-5
971-
000
,^ I"
2-0
00
85
x 1
0-8-
5 x
10-
rig
6-o
x io
-*/i
"O
. 6
-ox
IO
-*/I
-O6-
ox I
Q-'
/I-O
, I-
6XIO
~*/I
-O
OO
588 H. W I N E T AND S. R. KELLER
m so that only terms for the model in question, and the number of bundles being con-sidered, are present.
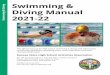
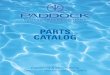
The curves which represent the various models and are compared with observationsare all presented as functions of Kb, a quantity which must be common to all possiblemodels of Spirillum. Variation of Kb, in turn, is due to changes in hb as Xb is limited totwo values, one for generating higher and one for lower model curve values. Modelcurves generated by the right-hand side of the spin and velocity ratio equations for RH,DHPB, PB and C (from CWW) are compared with data points generated by the left-hand side of the same equations in Figs. 6 and 7. Each curve represents a maximumor minimum (not absolute) locus of values between which the measured ratios aresupposed to lie. These extrema are not absolute because although they are maximaor minima for some of the parameters which generated them, they incorporate arbitraryestimates of such parameters as Kt and g. Other quantities generating these curves weretaken from the upper and lower ends of the ranges listed in Table 1. The specific valuesused to generate the extrema curves are listed in Table 4. All parameters were substi-tuted into the right side of equations (23-30) to generate the curves presented in thefigures. Measurements from 18 specimens were substituted into the left side of thesame equations to obtain model test values. No value for cf (and w) could be obtainedfrom six specimens. As nearly all of these had Kb values near 1 -o, an average spin ratioof 0-288 was obtained from an arbitrary selected group of specimens with Kb valuesnear i-o and this Q/w was used to generate the missing w (and cf) values frommeasured fi body angular velocity values. The bundle parameters used in generatingthe data points of Fig. 6 (a) are listed in Table 5. Averages and ranges for measuredvelocity and spin ratios are listed in Table 6. The large variances in the dynamic quanti-ties are not surprising if one assumes that fine strands of debris connecting the organismwith the slide are sufficient to result in lower-than-normal ratios. The highest ratios arenot so easily explained, particularly when repeated examination of the original framesproduced no evidence of convection. We may note in passing the rather large varianceinKb.
Close examination of Figs. 6 (a) and (b) reveals that all bundle beat forms save theparabolic are consistent with observations of swimming Spirilla. As indicated above,there are no time-dependent (i.e. elastic) hydrodynamic differences between the DHand RH models, but there are geometric dissimilarities which result from the elasticitydisparity. The terms which express the geometric dissimilarities on the right side ofequations (25) and (26) tend to be small and the resulting curves in Fig. 6 (a) differ byless than 1 %. The left side of the same equation, however, contains ct coefficients whichmagnify more than cb coefficients. Accordingly, more discrepancy appears between thedata points of Fig. 6 (a). A number of data values appears outside the model ranges inboth graphs of Fig. 6. The values below the minimum extremum can be readily ex-plained as due to abnormally low U values which were probably caused by adherence ofthe organism to strands of debris (a likely complication in sewage samples) which mayin turn be attached to the slide or coverslip. Data values above the maximum extremumcannot be so easily explained. As indicated above, fluid convection has not been detec-ted and appears unlikely, given xenon strobe illumination and a petroleum jelly-sealedslide. One is intuitively suspicious of a high velocity ratio such as the Vjcb value of0-96 for one Kb = 0738. But repeated measurements of the recorded images produced

Spirillum swimming: theory and observations of propulsion 589
Table 5. Geometric parameters used to calculate data points for the two helicalbundle models, the damped helix DH and the rigid helix RH
•The 0) and cf values for these specimens are estimated from Cl/co = 0288 .
K, cosa C. C
0-3710-4600-5120537057405860-73807380-819*0-859*0-889*I-OIO
1085x-i5»*i-i571-1901-4321-626*
m DH RH
1 o-6oo 0-7501
2
2
22
3 <
2 <
2
I
I
2
22I (
222
•000 •000[•200 2-500•200•200
[•2003-600 <5750 <['2OO
[-OOO
[-2OO
[-2OO
[-2OO[•20O
•500•200
[•2003-750>-75o[-2OO
[•OOO
[-2OO
[-2OO
[-2OO
[-5OO
3-600 0750[•000[•500 ;['OOO
[•OOO
)-OOO
•000
DH
0-9800-5970-5970-5970-5970-5970980O-S97O-597O-597O-597O-597O-597O-5970-980O-5970-980O-597
RH
o-597o-5970-9800-9800-597O-5970-59705970-597O-5970-597O-597O-5970-980o-597O-59709800-597
DH
006750-06120-05830-05830-05830-05830-06750-06510-05830-0612005830-05830-05830-058300675006120-054700612
RH
0-0651006120-04660-05470-05830-05830-06510-06510-0583006120-0583005830-05830-06120-0651006120-04660-0612
DH
0-04610-04040-03800-03800-03800-03800-0461004390-03800-0404003800-03800-03800-03800-0461004040-035000404
RH
004390-04040-02860-03500-03800-03800-0439004390-0380004040-038000380003800-040400439004040-02860-0404
Table 6. Measured velocity and spin ratios
(The value of the body helical pitch tangent xb is included as a reference. All variances arestandard deviations of the sample.)
Quantity Sample
181218
Average value
0-375 ±0-2560-375 ±0-2040-87410-350
Value range
0-040-0-9620-158-07550-371-1-626
no other value. Moreover, the present value does fit the helical models, so its existencecannot be dismissed out of hand as anomalous. Other velocity ratio data points whichare significantly underestimated by model ranges may be found to lie above the PBmaximum extremum curve, and, as expected, above the DHPB curves whose extremaare both too small vis-d-vis the data.
All spin ratio plots are referenced to the same Q/w form of spin ratio so a direct com-parison can be made of the four basic models. It is difficult to imagine data which wouldexceed the extrema of all but the PB and DHPB plots. Thus, it is not surprising that nodata points fall outside the C, DH or RH extrema. Moreover, the points which lieoutside the two sets of PB plots are below their estimated value, a condition which can beexplained by the same reasoning as that presented for the similar condition in thevelocity ratio plots.

59° H. WESTET AND S. R. KELLER
3s 20 -
0-5 10 1-5 20
10
0-5
P ^ p U+
0 0-5 10 1-5 20
Fig. 6. Velocity ratios as functions of body helix pitch. Model symbols have been shortenedfor convenience, from DH to D, from RH to R, from PB to P, from DHPB to DP andfrom CWW to C. The parameters used to generate the ' extrema' model curves are listed inTable 4. The parameters used to generate the data points are listed in Table 5.

Spirillum szoimming: theory and observations of propulsion 591
CONCLUSIONS
Observed spin and velocity ratios remain within the presented limits for all models ofSpirillum swimming save those which include the PB geometry (see Figs. 6, 7). WhilePB-containing models performed acceptably in predicting spin ratios, they consistentlyunderestimated the observed velocity ratios. The PB models, then, are invalidated bytheir predicted velocity ratios, notwithstanding the observations of Metzner (1921).The CWW model, in turn, is invalidated by photographic evidence, so, the accuracy ofits theoretical dynamic ratio predictions must be considered fortuitous.
There remain, then, the two helical models which differ so slightly in their ability toaccount for the data that one cannot choose between them. The true bundle wave may,in fact, be between 'rigid' and 'flexible' because there is evidence supporting bothextremes. On the one hand there must be enough flexibility to allow for the rather highcurvature bends near the base of the fore bundle which are detectable in Fig. 3 (a, d, g).The curling of individual flagella of a rod bacterium bearing bipolar bundles as de-scribed by Strength & Kreig (1971) also suggests a less-than-rigid flagellar structure.Given a flexible bundle one would expect, of course, that upon making the 'decision' toswim, a Spirillum commences a whipping motion with both bundles which wouldpropagate a base-to-tip helical wave down each. The firings of the initial beat impulsesat the two bundles would have to be asynchonous and/or of unequal magnitude - alikely condition given an anisotropic stimulus such as a chemical diffusion gradient -such that one of the two bundles would assume the lead in accelerating to a maximum w,angular velocity. Since both bundles naturally point away from the transverse plane ofthe body (see Fig. 2), the lead bundle would become the aft bundle and as the bodyattains steady translation the viscous stresses would bend both bundles aftward in amanner similar to that detectable in Figs. 3 and 5. Implicit in this interpretation is theprediction that a monotrichous Spirillum has an aft bundle only.
On the other hand, there must be limits to flagellar flexibility which would accountfor the observations of Jarosch (1972) cited above that the flagella of bundles splayed outby flattening Spirillum do not exhibit the pronounced damping one would expect for aflexible body, particularly one near a wall. Nor would flexibility be consistent withthe report of Krieg, Tomelty & Wells (1967) that the bundles (which they term'fascicles') of non-translating Spirillum volutans treated with coordination inhibitorsrotate as mirror images of one another.
The effect of viscous bending on the motion of the individual flagella is not clear.The rotating shaft concept of flagellar beat generation (Doetsch, 1966; Mussill &Jarosch, 1972; Berg & Anderson, 1973) ia certainly supported by the observations thatindividual flagella arise from separate 'holes' in the cell membrane (Williams & Chap-man, 1961) and the observation that the cell body of a bacterium stuck to a glass slideby its bundle 'would undergo violent back-and-forth movements around the point ofattachment' (Strength & Krieg, 1971). Moreover, there is no basis for assuming anyincompatability in accepting both an RH bundle and an individual flagellum rotationmodel so long as the flagella are wound in a sense opposite that of their rotation (Smith& Koffler, 1971). There is, however, some evidence that the flagella of Spirillum-likebacteria - at least Spirillum serpens - arise from a single common basal structure(Abram, 1969 as cited by Smith & Koffler, 1971). If the basal ends of all the flagella are

Spirillum szvimming: theory and observations of propulsion 593
DISCUSSION
Power expenditures for Spirillum swimming
Each living organism has at any instant a limited supply of biochemical energy whichis dissipated in the performance of chemical, mechanical, and concentration work. Themechanical work performed by a bacterium is limited to flagellar motion (with a possibleexception being a flexibacterium) which is divided into work performed against elastic(internal) and work performed against hydrodynamic (external) resistance. Elasticresistance includes 'bearing friction' on the rotating flagellum and the stiffness of theflagellum as it relates to wave propagation. The latter is, of course, negligible in anRH-type flagellum. (As regards the stiffness of the bundle, we can say that the fact thatSpirillum can reverse its swimming direction precludes a rigid-helix-parabola combina-tion which would be inconsistent with the exchange of bundle geometries between thepoles which should accompany swimming reversal.)
Hydrodynamic resistance includes not only the viscous stresses upon which rotationresistive theory is based, but also the viscous and pressure stresses which may developbecause of the non-slip condition at each solid boundary of two flagella which rotatevery close to one another. Berg & Anderson (1973) estimate that the value of this inter-flagellar drag is small because the spacing of the flagellar array is relatively large, but theactual spacing of the flagella has not been measured and dynamic pressure can be con-siderable where moving bodies are close enough to require a lubrication theory motionanalysis. Hence, the question of the significance of inter-flagellar energy dissipationcannot be considered settled.
Since the present analysis is confined to the net motion of the bundle, estimation ofthe rate of dissipation by or rate of work performed against the fluid viscous resistanceduring swimming is relatively simple. The power exerted by a swimming Spirillumagainst fluid resistance may be calculated for the models considered in this report bysubstituting (3-6) into (A 13) to obtain for the rigid helical body,
dPb = [Cn{V* + n*hl)Ab-C.{U-QhbKb)*\Ai;idu>; (31)
for m PB bundles,
dPp = m{lP[C'nB(yq)-i-C'sB-\yq)i] +^C'nB{yq)\}cosadq; (32)
for m RH bundles,
dPr = m[lP(C^Af-C'8) + G>*h}(C^Af-C'sKf) +zC's Uo,h,Kf]cos<zdp; (33)
and for m DH bundles,
dPd = m[lP{C'n - C'B) + (C; a>W,+C'n UW + zC'g UtahfKf) e-*™
+ (,)%}{C^ai-C's^)e-^]D-1cosadp. (34)
Integration of (31-34) over the entire body or bundle length gives for these modelsthe expressions listed in Table 7.
Accordingly, the total power output against viscous resistance by Spirilla swimmingwith one of the four basic bundle geometries considered here is, for the PB model
PpB = Pb+Pp (39)for the RH model
PELS = Pb+Pr (4°)

4
Mod
el
Rig
id h
elic
al b
ody
-Pb
= •
Ta
ble
7
. P
ow
er
dis
sipate
d a
gain
st f
luid
resi
stance to
pro
puls
ion
Pow
er
Wh
ere
PB
(pa
rabo
la)
-p,
=
RH
(ri
gid
hel
ix)
-P,
=~
i co
s a
DH
(dam
ped
hel
ix)
- P
d =
mg
-\Z
PJ t
+
otj
, +
z U
u>
JJ D
~* c
os a
H,=
7, U =
ln
?• =
In
Eq
uat
ion
no-
(35)
(36)
(37)
X
(38)

Spirillum szoimming: theory and observations of propulsion 595
10-
D, R, C -
io-7 -
•I 10-'
10"
: • •- p
I X
x £A *
• A
X
•
• •
•-
•
P1 1
AV
•
•
AX
•
•HI•
A
xx
••
•
1
1
4X
•
I
——
4X
•
—
AX
4X
" •
X
A
•
1
1
•
A
X•
1
__ .
cDP,R
mm m
1 -
- — -
-
-
—
X -
A
• i
i i
i i
1
-
D P ~1
1 i
i it
, i
1
10-
p
- 10-
- 10-
- 10"
1-2 1-4 1-610"
Fig. 8. Power dissipation by swimming Spirilla as a function of body helix pitch. Modelsymbols shortened as in Fig. 6. The bundle parameters used to generate the 'extrema'model curves and the data points were drawn from within the ranges listed in Table i . Theordinate on the left is scaled for all the non-parabolic models, and the one on the right forthe parabolic models. The arrows at the upper abscissa indicate power values based upon thespin ratios Cijai = 0288.
for the DH model
and for the CWW modelCWW). (42)
Illustrative 'extrema' curves generated by (39-42) as functions of Kb are presented inFig. 8. All parameters were manipulated within the ranges delineated in Table 3. Thedynamic variables U, Q and co are represented by their maximum measured values inthe upper plots and small non-zero values in the lower plots. Specific values of these

596 H . WlNET AND S. R. KF.TJ.KR
Table 8. Central tendencies of calculated power expenditures by swimming Spirillumfor four bundle geometry models
(Values are presented for flagellar bundles Pf, helical body Pb and the entire swimmingorganism PDB, -PPB. -PBH and Poww- Sample sizes N were 18 for all medians. All variancesare sample standard deviations which were reduced to values less than the listed averagesby discarding the more deviant sample values. Accordingly, the N values refer to the sizesof the samples used to compute the mean values only.)
Median Average N
p™*
PA
P7Paww*Pf*
Pi,*i
646063
538S-38670170
7 45a-oo4-07
' In io~* dyne cm s"1.
646 ±4-13o-99±°7S44°±3 88943 ±900
7'S4±5-3S
S420±4>3i
t In io~* dyne cm s"1.
1716
13IS
1717
1717
17
quantities are given in the figure legend. The abscissa to the left in the figure covers therange of values for the RH,DH and CWW models and the one on the right the PB modelvalues which are the same as for the DHPB model when m = 1. These results indicateanother reason for nature to reject the PB bundle geometry, which is that it is wasteful, asit requires the organism to dissipate swimming energy three orders of magnitude fasterthan do the other three bundle geometries. The one organism whose data points exceedall the model plots is the one with the hard-to-explain large U. It is possible that the DHmodel plot could have been adjusted to contain the data plot by inserting a value of g< o but no observations supported such an adjustment and we have defined £ > o. Theresults illustrated in Fig. 8, then, do support the acceptance of the two helical bundlemodels. These results are further summarized in Table 8. Here, the central tendency ofthe values for power dissipation from Fig. 8 are expressed in both median and meanform because the medians could be obtained for all 18 Spirilla while mean values whichwere greater than their standard deviations were only possible when some membersof the sample were ignored. (An examination of Fig. 8 will indicate that the powervalues for the 6 Spirilla forwhich Q/a> = 0-288 clustered around the mean. Accordingly,their exclusion from the mean calculations would have little effect on the mean buttheir inclusion kept the standard deviations small; so they were included.)
There remains now the task of showing that the power available for Spirillum propul-sion is sufficient for the hydrodynamic demands of a beating helical bundle. To besure, the energy generating process for motility is oxidative phosphorylation, but unlikethe case for eukaryote motility, ATP is not the energy source (Larsen et al. 1974).Unfortunately, the nature of the true energy source is still unknown beyond its appel-lation 'the intermediate form of energy for oxidative phosphorylation' (Larsen et al.1974). It would be instructive, accordingly, to evaluate the swimming energetics andconstruct a flagellar motor model based upon an ATP-energized motility. Then, whenthe necessary information about the true energy sources becomes available, the sameprocedure may be used to update the model.

Spirillum swimming: theory and observations of propulsion 597
Table 9. A comparison of power dissipation by body and flagellar bundle ofSpirillum with a representative eukaryote
Spirillum
Ciona spermj
i
2
I
2
I
36836-849-04 9 0
35
9-029-oa
10-9110-91
2-27-9-08
o-935-i-oa0-968-1-14
1-16-1-331-23-1-56
477-5'45
0-886-0-9640-795-0-9310-820-0-9400-699-0-887
0-05-0-20
2 1 92 1 93 0 93 0 9
49'5
• In io~* dyne cm 8~l. t I n IO"T dyne cm s"1.X These data are calculated from Brokaw (1975, 1965). «(,A represents the material body length.
The energy metabolism of Spirillum is not as well known as that of E. colt, anotherbacterium associated with sewage, but it shall be assumed here that their commonenvironment has selected for a similar physiology. The ultimate generator of energy in amodel cell is ATP and, accordingly, the availability of ATP for propulsion determinesthe energy available to flagellar bundles.
Utilizing the energy data from E. colt supplied by Lehninger (1971) one can calcu-late the total power capacity of a Spirillum cell as 1-38 x io"3 dyne cm s"1. Thermo-dynamic efficiency e can then be used to estimate the portion of total power capacityneeded for the work in question. Wilkie (1974) defines e = W/A'G, where W is the rateof working and A G which is the rate of change of Gibbs' free energy that generates Wfor vertebrate voluntary muscle is about o-66. The corresponding e for insect fibril-lar muscle which exhibits high frequency contractions is about 0-32. As indicated inTable 8 the rate at which biochemical energy must be supplied for Spirillum to performits work against external viscous resistance is about 5 x io"8 dyne cm s"1 which meansthe AC? must lie between 6-65 x io"8 and 1 -56 x io~' dyne cm s-1. If we can assume thatA'G is equivalent to 'power capacity' then the work performed against external viscousresistance requires only a small fraction of the total power capacity of the organism.
With these power data in hand we can return to the question of the internal dynamicsof the bacterial flagellum. The purpose here is not to explore the internal resistanceproblem, which as noted previously, is beyond the scope of the present analysis - aninvestigation similar to that conducted by Schneider & Doetsch (1974), in which theeffects of viscosity on flagellar bundle beat per se are used to indicate the magnitude ofinternal resistance, will be necessary - but to show how power expenditure data may beused to test the feasibility of flagellar contraction models. For the sake of this exercisewe shall assume (1) that the power dissipated by internal resistance is negligible and(2) that the work performed at a contraction unit - an attachment-detachment (A-D)cycle - is the same in both vertebrate striated muscle and a prokaryote flagellum. Thisassumption is invalidated by the work of Larsen et al. (1974) and there is no longer acompelling reason for retaining any component of the striated muscle model in con-structing a prokaryote contraction model. But since there are no available values forbiochemical energy consumed by prokaryote motility, the striated muscle values willhave to suffice.
The Berg & Anderson (1973) model considers a rotating shaft flagellum surroundedby an M ring of perimeter 7-07 x io"6 cm. The flagellum rotates at 50 Hz and is driven by3 A-D sites on the M ring each 8 x io~7 cm in length. Each A-D cycle's frequency is,

598 H. WINET AND S. R. KELLER
then, (7-07 x IO~~*I8 x io~7) x 50 = 442 Hz. If each A-D site generates a force of3-7 x io~7 dynes then thetotalpower generated by all three A-D sites, which is to say theflagellum, is 37 x io~7 dyne x 8 x io~7 cm x 3 x 442 Hz = 3-92 x io~10 dyne cm s"1.This value agrees with the estimate for flagellum power dissipation of 4 x io~10 dyne cms- 1 by Coakley & Holwill (1972). Unfortunately, the latter value is not a useful measurefor determining the biochemical energy spent to overcome external resistance becauseit does not represent the total fraction of externally dissipated power supplied to eachflagellum. This fraction must include power dissipated by both the flagellum and thebody because the motion of the flagellar bundle used to calculate its hydrodynamicpower dissipation is a consequence of both the A'G supplied and the forces and torquesexerted by the fluid on the entire organism. In eukaryote spermatozoa which exhibita planar flagellar beat, the power fraction spent by the body is 5-20 % of the total forthe organism (Brokaw, 1975). Although this fraction is significant, it is not as greatas the body fraction for Spirillum as indicated in Table 8. Indeed, the average for allspecimens in the present study is 6i-8 ± 27-2 % for the RH and 72-5 + 27-2 % for theDH model.
To better illustrate the utility of using the total organism power expenditure forcalculations of biochemical energy need as well as for construction of a rotatingshaft bacterial flagellum model, we consider a specimen whose bundle frequency issimilar to the example from Coakley & Holwill (1972). For this specimen we have/ = 49 Hz, m = 2, Kb = 0738, Ujcb = 0-640, Q/w = 0-266 and total power dissipatedP= SCPRH+^DH) = i'4><io"' dyne cms"1. If we reduce m to 1 then we haveP = I -24XIO~7 dyne cm s"1 and if we assume each flagellum receives an equalamount of AG and, as they assumed, that there are 200 flagella per bundle, then the ex-ternally dissipated power fraction received by each flagellum is 6-22 x io~10dyne cm s~x.If we follow the logic used for the Berg & Anderson (1973) model, then we would haveto postulate 5 A-D cycles or crossbridges which would give a power dissipation valueof 6-54 x io~10 dyne cm s- 1 per flagellum (including • j ^ of body).
Finally, the dynamics of Spirillum swimming can serve as an example of how naturalselection may lead to optimization of a biological function but does not require highefficiency. Chwang & Wu (1971) noted that the hydromechanical efficiency (Powerdissipated by flagella/Power dissipated by entire organism) is maximized if a uni-flagellated organism with a spherical body thickness-to-flagellum thickness ratiogreater than 10 swam with a rotational beat and if one with ratio less than 6 swam with aplanar beat. If we ignored the non-sperical shape of Spirillum and calculated the body-to-bundle ratio from the bb and bf values in Table 3, we would obtain a ration of 5-6which suggests that this bacterium is grossly inefficient. If, however, we drew a prolatespheroid around the average Spirilum (nb A6 = major axis of spheroid, hb = minor axis)and used its equivalent sphere radius in place of bb we would obtain a body-to-bundleratio of 3-8 :0-14 = 28. The true ratio undoubtedly lies between the values given, butis surely > 10 so it agrees quite well with the rotational resistive theory prediction. Incontrast the spermatozoa of the tunicate Ciona has a body-to-tail ratio of less than 6 andit swims with a planar beat (although it has been known to rotate (Brokaw, 1975)).The predictable consequences of this diversity are summarized in Table 9. Theamount of power dissipated by the Spirillum body is so large as compared to the flagellarbundle that hydromechanical efficiency — in this case 1 -o-PJP — is quite small as

Spirillum sioimming: theory and observations of propulsion 599
Shown in Table 9. This state of affairs is reflected in the relative motion of the two cells(the last column). T h e more efficient spermatozoan is over 15 times faster than theSpirillum. Yet, no one could claim that the prokaryote is any the less successful for thisinefficiency.
Meanings of symbols
bb material radius of rigid bodybf material radius of flagellar bundleC conical bundle beat model of C W Wcb wave propagation velocity of helical bodyCj wave propagation velocity of helical flagellar bundleCm viscous coefficient of moment of force tangent to bodyC'm viscous coefficient of moment of force tangent to bundleC n viscous coefficient of force normal to bodyC'n viscous coefficient of force normal to bundleC s viscous coefficient of force tangent to bodyC'a viscous coefficient of force tangent to bundleD H P B damped helix and/or parabola bundle beat model/ 6 rotation frequency of bodyFb force on bodyFd force on damped helical bundleff beat frequency of bundleFp force on parabolic bundleFr force on rigid helical bundleg damping coefficienthb amplitude of body helixhf amplitude of bundle helix or distance of bundle tip from cone or parabola axiskb body wave parameter; 2TrXb
x
kf bundle wave parameter; znXf1
I length of unbent bundleL material body lengthm number of flagellar bundlesnb number of body helical wavesns number of bundle helical wavesP total power dissipated; also parabolic bundle modelPb power dissipated by swimming bodyPd power dissipated by swimming damped helical bundleP D H power dissipated by organism with damped helical bundleP D S P B power dissipated by organism with damped helical and/or parabolic bundlePj power dissipated by bundlePr power dissipated by rigid helical bundleP R H power dissipated by organism with rigid helical bundler body radiusrb position vector for bodyrd position vector for damped helical bundle beatR H rigid helical bundle beat modelrp position vector for parabolic bundle beat
39 KXB 6j

600 H. WINET AND S. R. KELLER
rr position vector for rigid helical bundle beatU translational velocity of organismU volume of bodya average angle formed by bundle geometric axis with x axisflb pitch angle of body helix; tan-1/c6
fif pitch angle of bundle helix; tan~x/cyy parabolic coefficient7} hydromechanical efficiency8 kfx+(ot0 kbx-£ltKb tanfib;kbnb
Kf unpf\k,hf
Xb wavelength of body helixXf wavelength of bundle helixA arc length(j> 0)t
o) apparent angular velocity of rotation of flagellar bundlea), whip-torque spin or induced angular velocity of rotation of flagellar bundle£} counter-torque spin or apparent body spin
Thi s work was supported by National Science Foundat ion Grants E N G 74-23008A O i and A E N 72-03587 A O i . W e should like to thank D r Charles J. Brokaw forhis many useful conversations about this work.
REFERENCES
ABRAM, D. (1969). Basal structures and attachment of the polar flagella of Spirillum terpem. Bact.PTOC. 69, 29.
BERG, H. & ANDERSON, R. A. (1973). Bacteria swim by rotating their flagellar filaments. Nature, Lond.MS, 380-2.
BROKAW, C. J. (1965). Non-sinusoidal bending waves of sperm flagella. J. exp. Biol. 43, 155-69.BROKAW, C. J. (1975). Spermatozoan motility: a biophysical survey. Biol. J. Linn. Soc. 7 (Suppl. 1),
423-39.CALLADINB, C. R. (1975). Construction of bacterial flagella. Nature, Lond. 355, 121-4.CHWANG, A. T. & Wu, T. Y. (1071). A note on the helical movement of microorganisms. Proc. R. Soc.
Lond. B 178, 327-46.CHWANG, A. T., Wu, T. Y. & WINET, H. (1972). Locomotion of Spirilla. Biophys. J. 12, 1549-61.COAKLEY, C. J. & HOLWTLL, M. E. J. (1972). Propulsion of micro-organisms by three-dimensional
flagellar waves. J. theor. Biol. 35, 525-42.DOETSCH, R. N. (1966). Some speculations accounting for the movement of bacterial flagella. J. theor.
Biol. 11, 411-17.GRAY, J. & HANCOCK, G. J. (1955). The propulsion of sea-urchin spermatozoa. J. exp. Biol. 33,
802-14.HANCOCK, G. J. (1953). The self-propulsion of microscopic organisms through liquids. Proc. R. Soc.
Lond. A, 317, 96-121.JAROSCH, R. (1972). The participation of rotating fibrils in biological movements. Acta Protoxool. 11,
23-38.KELLER, J. B. (1974). Effect of viscosity on swimming velocity of bacteria. PTOC. Natl. Acad. Set.
USA, 71, 3253-4.KRIEO, N. R., TOMELTY, J. P. & WELLS, J. S. JR. (1967). Inhibition of flagellar coordination in
Spirillum •oolutanx. J. Bact. 94, 1431-6.LARSEN, S. H., ADLKR, J., GARGUS, J. & HOGG, R. W. (1974). Chemo-mechanical coupling without
ATP: the source of energy for motility and chemotaxis in bacteria. Proc. natn. Acad. Sci. U.S.A.71, 1239-43.

Spirillum szvimming: theory and observations of propulsion 601LBHNINGHR, A. L. (1971). Bioenergetict (ed. W. A. Benjamin), 345 pp. Menlo Park.LIOHTHILL, M. J. (1975). Flagellar hydrodynamics. The John von Neumann Lecture, S.IJ1JM.METZNER, P. (1921). Die Bewegung und Rergbeantwortung der Bipolar begir Belten Spirillea. Jakr.
Wist. Bot. 59, 325-412.MUSSILL, M. & JAROSCH, R. (1972). Bacterial flagella rotate and do not contract. Protoplasma 75,
465-9.SCHNEIDER, W. R. & DOETSCH, R. N. (1974). Effect of viscosity on bacterial motility. J. Bact. 117,
696-701.SMITH, R. W. & KOFFLER, H. (1971). Bacterial flagella. Adv. Microb. Physiol. 6, 219-340.STRENGTH, W. J. & KRIEO, N. R. (1971). Flagellar activity in an aquatic bacterium. Can. J. Microbiol.
17. 1133-7-WILKIE, D. R. (1974). The efficiency of muscular contraction. J. Meehanochem. Cell Mot. a, 257-68.WILLIAMS, M. A. & CHAPMAN, G. B. (1961). Electron microscopy of flagellation in species of Spirillum.
J. Baet. 81, 195-203.
APPENDIX
Mathematical analysisElement of force
According to the resistive theory of Gray & Hancock (1955) the force generated by anelement ds of a swimming wave is the vector sum of its tangential and normal com-ponents
dF = dFn + dFa> (A 1)where
dFn = -Cnvnds and dFa= -Cavtds (A 2)
and Cn and Ca are defined by Lighthill (1975) as
C n = . 4 ^ A . and C,= ,2nflk, , (A3)
n /o-ogAX a Zo-O9A\ " ' v *'
where A is the wave arc length, b the element thickness and fi the viscosity in poise.Keller (unpublished) has recently facilitated the application of this analysis to arbi-
trary swimming geometries by developing a parametric version of the Gray & Hancockformulation. By converting the velocity vectors to the following form
%i = v - e n and va=>\.ev (A 4)
where the e vectors are unit vectors normal and tangent to ds and in the same plane as
v = V(M, t) = vnen + v8ea = xi +yj + 4k = f(«, t). (A 5)
Here u is the parameter which varies with the geometry of the problem and the dot abover, x, y and z indicate differentiation with respect to time t. Substituting (A 2), (A 4)and (A 5) into (A 1) gives
dF = - Cn (y. en)en ds - Ca (v. e,)en ds. (A 6)
From vector calculus we use
andx'i+y'j + z'k
' { ' ' (a'a+ys-V2)*'
where the primes indicate differentiation with respect to u, to obtain the following
39-2

6O2 H. WlNET AND S. R. KELLER
where
dF, k = [ - Cnz(x'* +y'* + *'»)* + (Cn - Ca) z'(x'* +>" + z'*)-k (x'x +y'y + z'z) ] du k
(A 7)of which we utilize only the dFx term to represent the element of force of interest.
Element of torque
If the swimming wave rotates then the angular momentum must also be balanced forquasi-steady motion and according to the rotational resistive theory of Chwang Wu(1971) the moment of force on an element of the wave is
</M = rfM4, + <fMn (A 8)where
dMa = rxdF (A 9)and
dMn= -Cm£lds for which Cm = ^nfib2. (A 10)Upon substituting (A 7) in (A 9) and both (A 9) and (A 10) in (A 8) we obtain the fullterm for the element of torque, the x component of which is
xdui-CmSlxds. (An)
The Cm term shall not be explored further because, as shown in the text, it is smallenough to be ignored and its analysis requires complications beyond the level of thepresent work.
Element of power
The rate of energy expenditure or working by the swimming wave against fluidviscous drag in the x direction is calculated in a straightforward manner from
dP=-v.d¥. (A 12)
Accordingly, we substitute (A 5) and (A 7) into (A 12) to obtain for the quasi-steadycase
dP = - [ - Cn (*» +^»+iJ) (*'* + / a + *'a)* + (Cn - C.) (*'* +y'y + z'zfx (*'a + / * + a'a)-i] du. (A 13)