Embed Size (px)
Citation preview

Specialization module TTM5Part: Collaboration Space Building Block 2
Item/NTNU October 2013. L A Rønningen

CollSpace2 – a realization of a collaboration space
Legend: CSBB2 – CollSpace2 Building block. Space width x depth x height = 4 x 3 x 2.5 m.

3
NRENUninet
t
TransferDecompress
Process
TransferCompress
Process
Optical end-to-end delay - Σ
>20 adaptive views, all
surfaces are multi-view
displays
2 views,2-3 displays
Large number of cameras
integrated into displays
60 fps –> 8.3 ms mean delay
240 fps –> 2.1 ms mean delay
240 fps –> 2.1 ms mean delay
30 ms 30 ms15 ms
Now, Σ ≈ 90 ms
Future DMP, Σ ≈ 24 ms
5 ms 5 ms10 ms
DMP – Distributed Multimeda Plays Architechture
A fewcameras
60 fps –> 8.3 ms mean delay

A multi-view display with a special plano-concave lens array and laser scan

CSBB composed of four 1/4CSBBs each of size 65 x 65 mm

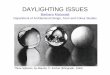
Sparse aperture, PSF, OTF, MTF
• PSF = |F{aperture function}|• MTF = |OTF|= |F{PSF}| = autocorrelation of aperture function• MTF gives the contrast for all spatial frequencies between 0
and cut-off.• An optical system without aberration is said to be diffraction
limited
2

Real Airy disk created by passing a laser beam through a pinhole aperture
(source: http://en.wikipedia.org/wiki/Airy_disk)

Sparse Apertures
A sparse aperture system captures the scene radiance from several small apertures instead of one big. As with a single lens, it is important that all rays for a given scene point arrive in phase.
In the Collaboration Space (CollSpace2) integrated display and camera system, RGB lasers are used to scan and show multiple views.In order to be nearly invisible and not make any conflict with the laser, the cameras have to be very small (1 mm diameter) and nearly invisible, and have to be placed on the edges of the CSBB module.

OTF for one circular aperture
OTF(ρ) = circ(ρ)circ(ρ) = for
Where is the autocorrelation
, radial spatial frequency, cut-off spatial frequency – focal length, – aperture diameter, – wavelength of light

Design of optimal sparse apertures
• The MTF – should be radially symmetric– must have no zeros before cut-off (low-pass filter)– values must be larger than the noise values– can then be restored by e. g., Wiener filter
• In the case of CSBB2, the sub-apertures must be placed on the edges of the laser display

With N circular, equal, in-phase apertures the OTF equals the MTF
MTF(ρ) =
for , ,
, components of the vector between two apertures
is the convolution operator

Camera lenses as can be distributed on the boundary
Legend: L – luminance camera, C – colour camera, R – right, L – left, U – up, D – down. For example, LRU denotes a luminance camera array covering the upper right space segment seen from the camera.

The MTF of the LRD
The cut-off frequencies are 6D/ and D/

How to find the MTF by autocorrelating the aperture function
Full (nearly) overlap Moved one diameter 1D, Moved 2D area 7A overlap area 1A overlap area 2A
Moved 3D, overlap area 1A Moved 6D, no overlap (cut-off)

7-aperture images of a chirp

CMOS and CCD sensors
• CMOS– Digital and analog
circuits + sensor on one chip
– Fast and random readout
– Low power consumption– Low price
• CCD– Higher S/N than CMOS– Higher dynamic range

CollSpace2 LRGB cameras
• Separate Luminace (L) and color (RGB) cameras– Human perception is much more sensitive to luminance
than colour -> down-sample colour in time and space– L sensors much more sensitive than RGB sensors, due to
‘Bayer’
• Combining L and RGB using Photoshop– See Syllabus
• See separate description of lab exercise


![Rocket Trajectories By Jan-Erik Rønningen Norwegian Rocket Technology [ contact@rocketconsult.no ]contact@rocketconsult.no [ ]](https://img.pdfslide.us/doc/110x75/56649d055503460f949d9290/rocket-trajectories-by-jan-erik-ronningen-norwegian-rocket-technology-contactrocketconsultno.jpg)